§ 5. Принципиальная схема фотограмметрической камеры. Дисторсия объектива и элементы внутреннего ориентирования
Фотокамера, применяемая для топографической съемки, имеет жесткую конструкцию и состоит из корпуса 3 (рис. 15), объектива 4 и прикладной рамки /. Прикладная рамка находится в задней фокальной плоскости Fo´объектива (в плоскости наилучшего изображения). С этой плоскостью совмещается светочувствительный слой фотопластинки 2 или фотопленки.
Прямая, проходящая через узловую точку объектива S перпендикулярно к плоскости прикладной рамки, называется оптической осью фотокамеры или главным лучом. Пересечение оптической оси фотокамеры с плоскостью прикладной рамки образует главную точку о снимка.
В
плоскости прикладной рамки имеются
четыре координатные метки (рис. 16),
которые изображаются на каждом снимке
и определяют системы координат о’ху.
Прямые,
соединяющие противоположные
координатные метки, должны быть взаимно
перпендикулярны, а точка пересечения
их о’ должна совпадать с главной
точкой о
снимка.
Расстояние от внутреннего центра проекции S‘ (см. рис. 15) до плоскости прикладной рамки называется фокусным расстоянием фотокамеры.
Положение внутреннего центра проекции S‘ относительно плоскости прикладной рамки определяют элементы внутреннего ориентирования. К ним относятся координаты х0, у0 главной точки о и фокусное расстояние фотокамеры f= S‘‘o.
До сих пор мы считали объектив идеальным, дающим строго подобное (ортоскопическое) изображение фигуры, расположенной в плоскости, перпендикулярной к оптической оси. В реальном объективе ортоскопия может быть нарушена. Нарушение ортоскопии называется дисторсией.
Различают
дисторсию центрированного объектива
и нецентрированного. Дисторсия
центрированного объектива вызывает
смещение точек относительно идеального
положения по радиальным направлениям,
проходящим через главную точку снимка.
При определении фокусного расстояния фотокамеры вместо действительного S‘ (рис. 17) выбирают фиктивный внутренний центр проекции S» так, чтобы центральная проекция наиболее близко подходила к оптическому изображению в плоскости прикладной рамки.
Пусть S и S‘ — совмещенное положение внешнего и внутреннего центров проекции: IS1 — луч, изображающий точку I объекта. Вследствие дисторсии — точка центральной проекции, полученная в результате пересечения плоскостью
 ..,
rп
от
оптической оси, относительно соответственных
точек 1′,
2′,...,
п’
центральной
проекции.
..,
rп
от
оптической оси, относительно соответственных
точек 1′,
2′,...,
п’
центральной
проекции.Отрезкам r1, r2,…, rп оптического изображения на центральной проекции соответствуют
Разность между соответственными отрезками г’ и г называется фотограмметрической дисторсией:
Фокусное расстояние фотокамеры определяется под условием
Решая систему уравнений (8) по методу наименьших квадратов, получаем нормальное уравнение
откуда
Определив фокусное расстояние, найдем фиктивный центр проекции и по формулам (8) фотограмметрическую дисторсию.
Углы ω можно
измерять на оптической шкале, наблюдая
через объектив фотокамеры перекрестия
контрольной сетки, установленной в
плоскости прикладной рамки. Контрольная
сетка представляет собой точную
5-миллиметровую квадратную сетку,
нанесенную на плоскопараллельную
стеклянную пластинку.
При геометрическом анализе снимка за внешний центр проекции принимают переднюю узловую точку объектива S (рис. 18). С этой точкой совмещают и фиктивный внутренний центр проекции S«, перемещая соответственно плоскость снимка из положения Р’ в положение Р так, чтобы So = S«o‘=f.
Для введения поправок Δ
(10)
Если известны поправки Δr для трех точек снимка или более, то можно составить уравнения (10) для этих точек и в результате решения найти коэффициенты k1, k2 и k3, а затем вычислить Δr для любой точки снимка.
Поправки за дисторсию в координаты точки снимка получают по формулам
(11)
ОглавлениеПРЕДИСЛОВИЕВВЕДЕНИЕ Глава 1. ОСНОВНЫЕ ПОНЯТИЯ ГЕОМЕТРИЧЕСКОЙ ОПТИКИ. ПОВЕРХНОСТИ, ИСПОЛЬЗУЕМЫЕ В АСТРОНОМИЧЕСКОЙ ОПТИКЕ § 1.2. Правила знаков § 1.3. Параксиальная оптика (оптика Гаусса) § 1.4. О форме поверхностей, используемых в астрономической оптике § 1.5. Масштабирование систем, содержащих асферические поверхности § 1.6. Отступление асферической поверхности от сферы. Ближайшая сфера сравнения Глава 2. АБЕРРАЦИЯ ОПТИЧЕСКИХ СИСТЕМ § 2.1. Волновая, угловая, продольная и поперечная аберрации § 2.2. Разложение выражений для аберраций в ряд. Аберрации третьего порядка (оптика Зейделя) § 2.3. Сферическая аберрация третьего порядка и выбор плоскости наилучшей фокусировки § 2.4. Кома § 2.5. Астигматизм и кривизна поля § 2.6. Дисторсия § 2.7. Хроматические аберрации § 2.8. Коэффициенты аберраций третьего порядка.  Зависимость аберраций от положения входного зрачка
Зависимость аберраций от положения входного зрачка2.9. Вычисление аберраций третьего порядка § 2.10. Примеры расчета аберраций третьего порядка. Программы для микрокалькулятора § 2.11. Расчет волновых аберраций § 2.12. Аберрации пятого порядка § 2.13. Сводка влияния аберраций на вид изображения точки § 2.14. Выбор плоскости фокусировки при визуальных и объективных наблюдениях в случае наличия сферической аберрации пятого порядка Глава 3. ОБЩИЕ МЕТОДЫ РАСЧЕТА ОПТИЧЕСКИХ СИСТЕМ § 3.2. Расчет параксиального луча § 3.3. Тригонометрический расчет хода непараксиального луча в меридиональной плоскости через систему со сферическими поверхностями § 3.4. Тригонометрический метод расчета хода меридионального луча через произвольную асферическую поверхность § 3.5. Расчет хода лучей через оптическую систему по формулам Федера § 3.7. Расчет децентрированных оптических систем § 3.8. «Диаграмма пластинок» Бёрча § 3.  9. Метод М.М. Русинова композиции оптических систем 9. Метод М.М. Русинова композиции оптических систем§ 3.10. Методы автоматической оптимизации оптических систем § 3.11. Программа OPTIC Глава 4. ЭЛЕМЕНТЫ ОПТИЧЕСКИХ СИСТЕМ ТЕЛЕСКОПОВ § 4.1. Преломление луча на одиночной сферической поверхности. Сферическая аберрация третьего порядка при преломлении § 4.2. Преломление луча на одиночной асферической поверхности. Ретушь преломляющей сферической поверхности § 4.3. Отражение луча от неплоского зеркала. Сферическая аберрация зеркал § 4.4. Ретушь сферического зеркала. Отражающие поверхности второго порядка § 4.5. Внеосевые аберрации зеркальной поверхности вращения второго порядка. Кома и астигматизм § 4.6. Применение метода «диаграммы пластинок» Бёрча к зеркалу второго порядка § 4.7. Влияние положения входного зрачка перед одиночным зеркалом второго порядка на аберрации третьего порядка § 4.8. Бесконечно тонкие линзы § 4.9. Линзы конечной толщины § 4.10. Мениски § 4.11. Отражение лучей в квазиплоском зеркале § 4.  12. Преломление лучей на плоскости; плоскопараллельная пластинка 12. Преломление лучей на плоскости; плоскопараллельная пластинка§ 4.13. Использование оптических волокон в астрономических телескопах Глава 5. ЛИНЗОВЫЕ СИСТЕМЫ ТЕЛЕСКОПОВ И МЕТОДЫ ИХ РАСЧЕТА § 5.1. Однолинзовый объектив § 5.2. Ахроматический объектив § 5.3. Вторичный спектр двухлинзового ахроматического объектива и объективы с уменьшенным вторичным спектром § 5.4. Сферохроматическая аберрация двухлинзового объектива § 5.5. Кривизна поля, астигматизм и дисторсия объективов § 5.6. Остаточные аберрации объективов § 5.7. Расчет бесконечно-тонкого двухлинзового несклеенного ахромата § 5.9. Расчет тонкого двухлинзового несклеенного объектива по методу Г.Г. Слюсарева § 5.10. Расчет двухлинзового объектива методом G-сумм Конради § 5.11. Двухкомпонентные объективы. Дублеты и телеобъективы § 5.12. Апохромат и триплет Тейлора. Сложные объективы § 5.13. Окуляры Глава 6. ОДНОЗЕРКАЛЬНЫЕ И ДВУХЗЕРКАЛЬНЫЕ СИСТЕМЫ ТЕЛЕСКОПОВ § 6.  1. Однозеркальные системы рефлекторов 1. Однозеркальные системы рефлекторов§ 6.2. Классификация двухзеркальных систем телескопов и их габаритный расчет § 6.3. Применение «диаграммы пластинок» Бёрча к двухзеркальным телескопам; их аберрации § 6.4. Двухзеркальные системы, свободные от сферической аберрации § 6.5. Классические двухзеркальные системы рефлекторов § 6.6. Апланатические двухзеркальные системы рефлекторов § 6.7. Некоторые специальные схемы двухзеркальных телескопов. Система Боттема-Вудруффа. Фокус Эппса. Брахиты § 6.8. Телескопы для наблюдений в инфракрасной области спектра § 6.9. Рефлекторы рентгеновского диапазона длин волн Глава 7. ТРЕХЗЕРКАЛЬНЫЕ СИСТЕМЫ ТЕЛЕСКОПОВ § 7.2. Классификация трехзеркальных систем оптических телескопов § 7.3. Габаритные соотношения в трехзеркальных системах телескопов § 7.4. Диаграмма Бёрча для трехзеркальных систем телескопов и их аберрации § 7.5. Виньетирование в трехзеркальных системах телескопов § 7.6. Кома и смещение изображения при децентрировках зеркал в трехзеркальных телескопах § 7.  7. Анастигмат с двукратным отражением света от главного зеркала 7. Анастигмат с двукратным отражением света от главного зеркала§ 7.8. Трехзеркальный телескоп-анастигмат с плоским полем § 7.9. Промежуточный фокус в трехзеркальных телескопах § 7.10. Системы с афокальным ходом лучей между первым и вторым зеркалами § 7.11. Трехзеркальные телескопы с фокальной плоскостью, хорошо защищенной от постороннего света Глава 8. КОРРЕКТОРЫ ПОЛЯ В ЗЕРКАЛЬНЫХ ТЕЛЕСКОПАХ. ПРЕОБРАЗОВАТЕЛИ ФОКУСНОГО РАССТОЯНИЯ § 8.2. Корректор Росса. Расчет двухлинзового афокального корректора к одиночному зеркалу § 8.3. Афокальный двухлинзовый корректор сферической аберрации и комы к произвольной двухзеркальной системе § 8.4. Общая теория корректора с асферическими пластинками § 8.5. Асферический корректор главного фокуса двухзеркального телескопа (корректор к отдельному гиперболическому зеркалу) § 8.6. Корректор вторичного фокуса двухзеркального телескопа с одной асферической коррекционной пластинкой. Система квази-Ричи-Кретьена § 8.7. Корректор астигматизма для классической системы Ричи-Кретьена § 8. 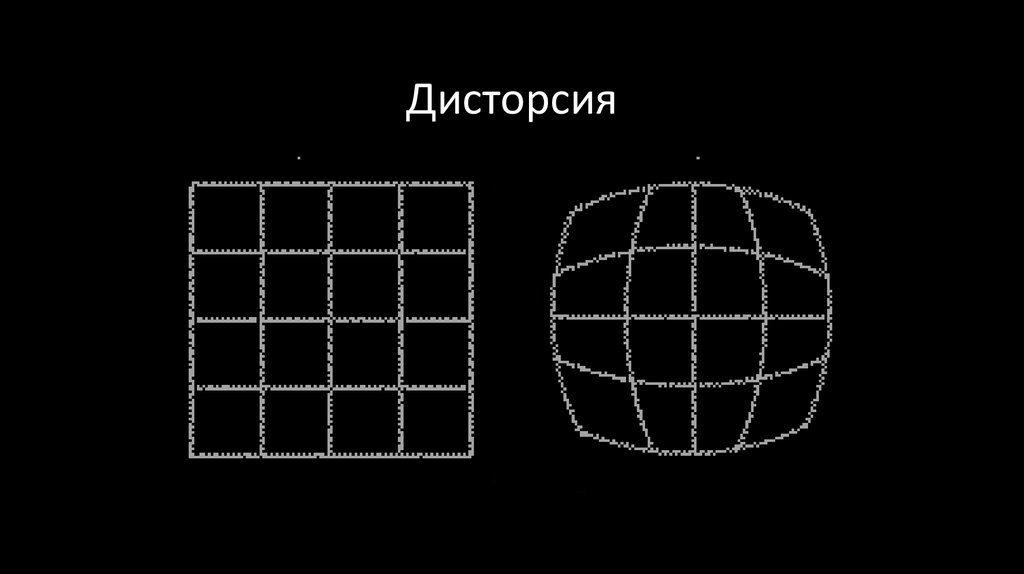 8. Преобразователи фокусного расстояния 8. Преобразователи фокусного расстоянияГлава 9. КАМЕРА ШМИДТА § 9.1. Идея камеры Шмидта § 9.2. Уравнение профиля сечения пластинки Шмидта § 9.3. Хроматизм камеры Шмидта § 9.4. Монохроматические аберрации камеры Шмидта § 9.5. Габаритные соотношения в камере Шмидта и виньетирование § 9.6. Влияние децентрировок в камере Шмидта на качество изображения § 9.7. Блики и ореолы в камере Шмидта § 9.8. Расчет камер Шмидта § 9.9. Модификации камер Шмидта Глава 10. МЕНИСКОВЫЕ СИСТЕМЫ МАКСУТОВА § 10.1. Идея менисковых систем § 10.2. Аберрации классических менисковых систем § 10.3. Расчет классической менисковой системы; метод Волосова [1948] § 10.4. Разновидности менисковых систем Глава 11. ПРОЧИЕ КАТАДИОПТРИЧЕСКИЕ СИСТЕМЫ; СИСТЕМА КЛЕВЦОВА; КАМЕРА ВСЕГО НЕБА ЛЕНГАУЭРА § 11.1. Системы Калеба Смита, Шупмана, Зоннефельда, Рихтера-Слефогта, Чуриловского, «менисковый Росс» Максутова § 11.2. Катадиоптрические системы с вторичным зеркалом Манжена; система Клевцова § 11.  3. Камера всего неба («All-sky»-кaмepa) Ленгауэра 3. Камера всего неба («All-sky»-кaмepa) Ленгауэра |
 Н. Оптика астрономических телескопов и методы ее расчета. — М.: Физматлит, 1995. — 333 с.
Н. Оптика астрономических телескопов и методы ее расчета. — М.: Физматлит, 1995. — 333 с.
Модель коррекции объектива — PanoTools.org Wiki
Содержание
- 1 Модель коррекции объектива
- 1.1 Поле зрения
- 1.2 Параметры дисторсии объектива a, b и c
- 1.2.1 Дисторсия объектива и «рыбий глаз»
- 1.3 Параметры d и e сдвига объектива или изображения
- 1.4 Параметры g и t сдвига изображения
- 1.5 Определить коррекцию объектива
- 1.6 Оптимизация для коррекции объектива
- 1.7 Инструменты для исправления бочкообразной и подушкообразной дисторсии
- 1,8 См. также
Модель коррекции объектива
Инструменты панорамы имеют очень гибкую модель для исправления типичных геометрических ошибок объектива. Более того, он часто даже может оценивать параметры коррекции непосредственно по изображениям в панораме.
Всего имеется 6 параметров, связанных с коррекцией объектива.
- В первую очередь поле зрения объектива (FoV) — не то чтобы ошибка, а параметр, определяющий искажение перспективы изображения.
- Фактические параметры коррекции объектива a , b и c , которые используются для коррекции бочкообразной дисторсии, подушкообразной дисторсии и даже волнообразной дисторсии.
- Параметры сдвига объектива d и e , которые корректируют оптическую ось объектива, не находящуюся в центре изображения.
Еще два параметра корректируют ошибки изображения, вызванные, например, не объективом, а сканером или сканирующей камерой. Это параметры сдвига ф и г .
Поле зрения
Фокусное расстояние — это физическое свойство объектива. Вместе с эффективным размером сенсора или пленки и расстоянием фокусировки он приближается к полю зрения изображения (на него влияют и другие факторы). Внимание! . Обрезка изображения изменяет поле зрения. Если вам нужно обрезать исходные изображения для панорамы, обрежьте их все до одинакового размера!
Поле зрения вместе с проекцией объектива (прямолинейная, «рыбий глаз» или цилиндрическая для камер с поворотным объективом) определяют искажение перспективы изображения. Искажение перспективы меньше с меньшим полем зрения. См. страницу Гельмута Дерша [1] для получения подробной информации о различных широкоугольных перспективах.
Искажение перспективы меньше с меньшим полем зрения. См. страницу Гельмута Дерша [1] для получения подробной информации о различных широкоугольных перспективах.
Дисторсия объектива параметры a, b и c
Для идеальной прямолинейной оптики камеры все, что вам нужно знать, это поле зрения. Идеальных результатов можно добиться, просто сопоставив пиксели изображения с касательной плоскостью. Реальные линзы отклоняются от этой идеальной проекции касательной плоскости. Отклонения отталкивают и оттягивают фиксированные точки сцены от того места, где они должны были бы оказаться. К счастью, почти все отклонения происходят не произвольно, а радиально, по направлению к некоторому общему центру или от него, и, к счастью, величина отклонения почти одинакова на заданном радиусе вокруг этого центра. Следовательно, модель, которая корректирует это отклонение на основе радиуса, дает довольно хорошие результаты. 9{2}+{c}r_{dest}+d)r_{dest}}
, где rdest{\displaystyle r_{dest}} и rsrc{\displaystyle r_{src}} относятся к нормализованному радиусу изображения пиксель. Центральная точка этого радиуса находится там, где оптическая ось касается изображения — обычно это центр изображения. Нормализованный означает, что самый большой круг, который полностью вписывается в изображение, имеет radius=1.0 . (Другими словами, радиус = 1,0 — это половина меньшей стороны изображения.) Идеальная линза будет иметь a = b = 9{2}+d{r_{dest}}}
Центральная точка этого радиуса находится там, где оптическая ось касается изображения — обычно это центр изображения. Нормализованный означает, что самый большой круг, который полностью вписывается в изображение, имеет radius=1.0 . (Другими словами, радиус = 1,0 — это половина меньшей стороны изображения.) Идеальная линза будет иметь a = b = 9{2}+d{r_{dest}}}
, что по сути то же самое.
Обычные значения для a , b и c ниже 1,0, в большинстве случаев ниже 0,01. Слишком высокие значения говорят о том, что вы выбрали неправильный тип объектива, т.е. «рыбий глаз» вместо прямолинейного или наоборот. Это относится к абсолютным значениям, поскольку a , b и c могут быть положительными или отрицательными (например, как 4,5, так и -4,5 считаются слишком высокими значениями).
Четвертый параметр ( d ) доступен только в фильтре «Правильный радиальный сдвиг» плагинов Panorama Tools. Он рассчитывается неявно с помощью pano12 (используется PTOptimizer, PTStitcher и графическими интерфейсами), чтобы сохранить одинаковый размер изображения:
- d = 1−(a+b+c){\displaystyle d=1-(a+b+c)}
Следовательно, он недоступен в различных интерфейсах графического интерфейса пользователя (вы можете увидеть его в сценарий результата PTOptimizer).
К сожалению, другой параметр, также называемый d , относится к смещению изображения в сценариях PTStitcher и PTOptimizer, а также в графических интерфейсах. Иногда это вызывает путаницу. (Подробнее об обсуждении см. ниже.)
Этот полиномиальный подход никогда не бывает точным, но может дать довольно хорошее приближение к реальному поведению данной линзы. Если вам нужна более качественная коррекция, вы должны использовать матрицу искажения, как это используется в Distortion Remove (см. ссылку ниже).
Дисторсия объектива и эффект «рыбий глаз»
В отличие от прямолинейных объективов, объектив «рыбий глаз» не соответствует геометрии касательной плоскости, а вместо этого имеет встроенных искажений , предназначенных для достижения широких полей зрения. Параметры радиального искажения объектива используются одинаково для прямолинейных объективов и объективов типа «рыбий глаз», но их никогда не следует использовать для переназначения «рыбий глаз» на прямолинейное изображение.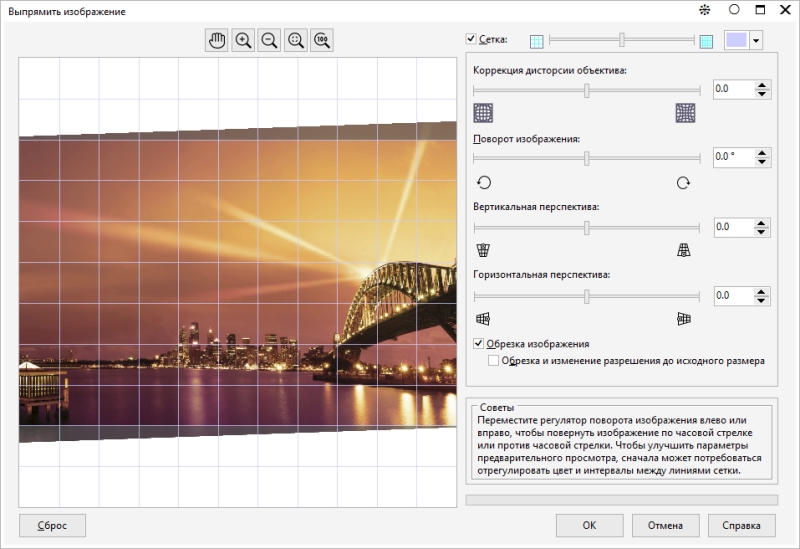 Это делается путем выбора правильной проекции источника и назначения. Геометрия «рыбий глаз» следует за быстро меняющейся тригонометрической функцией, которую вряд ли можно аппроксимировать полиномом третьей степени.
Это делается путем выбора правильной проекции источника и назначения. Геометрия «рыбий глаз» следует за быстро меняющейся тригонометрической функцией, которую вряд ли можно аппроксимировать полиномом третьей степени.
Для «рыбий глаз» параметры коррекции объектива корректируют отклонение между реальным объективом и идеальной геометрией «рыбий глаз».
Параметры d и e сдвига объектива или изображения
Иногда объектив и датчик изображения могут быть не центрированы относительно друг друга. В этом случае оптическая ось не приходится на центр изображения. Это особенно касается отсканированных изображений, когда вы никогда не можете сказать, находится ли пленка в центре сканера или нет.
Если для таких изображений используется описанный выше алгоритм коррекции объектива, то и коррекция объектива, и коррекция перспективы работают с неверной центральной точкой. Параметры сдвига объектива d (горизонтальный сдвиг) и e (вертикальный сдвиг) компенсируют эту проблему. Они содержат значения в пиксельных единицах, которые определяют, насколько центр радиальной коррекции смещен за пределы геометрического центра изображения.
Они содержат значения в пиксельных единицах, которые определяют, насколько центр радиальной коррекции смещен за пределы геометрического центра изображения.
Сдвиг изображения g & t параметры
Сдвиг изображения не является искажением объектива, но, тем не менее, является частью модели коррекции объектива Panotools. Он исправляет искажение, вызванное сканерами или сканирующими камерами, из-за которого прямоугольное изображение срезается до формы параллелограмма (одна сторона изображения смещается параллельно противоположной стороне).
Определение коррекции объектива
a , b , c и FoV — физические свойства комбинации объектив/камера на заданном расстоянии фокусировки. Если вы всегда снимаете с одной и той же настройкой фокуса, т.е. бесконечность или гиперфокальное расстояние, то вы можете безопасно повторно использовать параметры. При разных настройках фокуса FoV будет заметно меняться, но обычно можно повторно использовать a , b и c даже в этом случае.
Существует несколько способов определения a, b, c и fov параметры для калибровки конкретной комбинации объектив/камера:
- Создание одной фотографии объекта, содержащего прямые линии, определение одного или нескольких наборов контрольных точек прямых линий (типы t3, t4 и т. д.) и оптимизация только для a, b, c. Вам нужно установить формат вывода на прямолинейную проекцию, чтобы этот метод работал. Этот метод используется автором PTLens. Инструмент caulibate_lens также использует этот метод и может работать с изображениями Fisheye Projection с углом обзора более 180°.
- Сделать одну фотографию прямоугольного или сетчатого объекта, выбрать множество контрольных точек по горизонтали и вертикали, затем оптимизировать крен, тангаж, рыскание, поле зрения, a, b и c. Вам нужно установить формат вывода на прямолинейную проекцию, чтобы этот метод работал. Процесс аналогичен этому руководству по архитектуре Hugin:
- Делаем две или более перекрывающихся фотографий и выбираем множество обычных контрольных точек, затем оптимизируем крен, тангаж, рыскание, угол обзора, a, b и c.
 Этот метод работает с любым выходным форматом проекции, но требует изображений без параллакса, снятых точно из точки отсутствия параллакса. Обратите внимание, что для точного измерения поля зрения необходимо снять полную панораму на 360 градусов.
Этот метод работает с любым выходным форматом проекции, но требует изображений без параллакса, снятых точно из точки отсутствия параллакса. Обратите внимание, что для точного измерения поля зрения необходимо снять полную панораму на 360 градусов.
- Использование точек, о которых известно, что они находятся непосредственно друг над другом, например, края зданий, окна, отражения в прудах и т. д. Это метод вертикальных контрольных точек, который работает с равнопромежуточной проекцией или прямолинейной проекцией и всеми объективами, включая те, что шире 180°.
- Использование таких инструментов, как PTLens, Lensfun или Fulla, для чтения метаданных EXIF фотографии и автоматического исправления изображения путем поиска объектива в существующей базе данных.
Оптимизация для коррекции объектива
Если вы оптимизируете коррекцию объектива для калибровки объектива, вам следует помнить о некоторых фактах:
Поскольку параметры коррекции объектива определяются путем оценки искажения при различных значениях радиуса, необходимо обеспечить достаточное количество контрольных точек в большом диапазоне радиусов от центра изображения.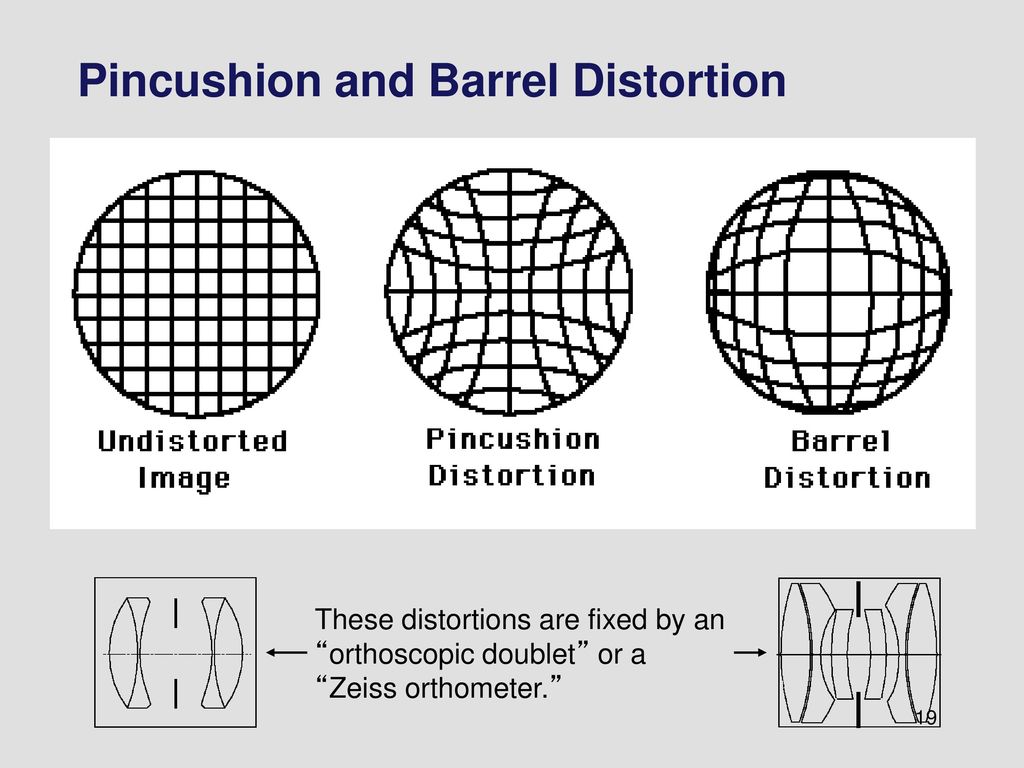
- Если для этой задачи вы используете прямоугольный шаблон или прямые линии, убедитесь, что вы установили контрольные точки на всех расстояниях от центра.
- Если вы используете два или более изображений, убедитесь, что вы перекрываете области с большим потенциальным искажением (например, углы) с областями с низким возможным искажением (например, в центре). Подойдет только горизонтальное перекрытие, но используйте не менее 50%, чтобы перекрыть центр изображения одного изображения границей другого. Параметры
a , b и c влияют на поле зрения, особенно для изображений с альбомной ориентацией, но немного и для изображений с портретной ориентацией. Это связано с тем, что хотя неявное вычисление четвертого полиномиального параметра пытается сохранить изображение того же размера, это возможно только при радиусе r_src = 1,0.
Вне этого радиуса, особенно в углах изображения, размер и, следовательно, поле зрения могут отличаться. Так как они взаимосвязаны таким образом, вы всегда должны разрешать оптимизацию и для FoV, если вы оптимизируете для a , b и c с более чем одним изображением. (Вы не можете оптимизировать поле зрения только с одним изображением). Как отмечалось выше, вам нужна полная 360-градусная панорама, чтобы получить точное измерение поля зрения.
Так как они взаимосвязаны таким образом, вы всегда должны разрешать оптимизацию и для FoV, если вы оптимизируете для a , b и c с более чем одним изображением. (Вы не можете оптимизировать поле зрения только с одним изображением). Как отмечалось выше, вам нужна полная 360-градусная панорама, чтобы получить точное измерение поля зрения.
Параметры a и c управляют более сложными формами искажения. В большинстве случаев будет достаточно оптимизировать только параметр b , который хорошо исправляет нормальную бочкообразную и подушкообразную дисторсию.
Если вы хотите увидеть, как изменение параметров влияет на коррекцию искажений, перейдите на http://4pi.org/downloads/ и получите abc.xls . Не отключайте макросы при загрузке.
См. также страницу бочкообразного дисторшна Хельмута Дерша.
Есть отличное руководство по оптимизации от Джона Хоутона: [2]
Инструменты для исправления бочкообразной и подушкообразной дисторсии
- Сценарий оригинального PTStitcher позволяет выполнять пакетную обработку изображений с известными параметрами a, b и c.
 Он также может работать с одним из интерфейсов GUI.
Он также может работать с одним из интерфейсов GUI.
- nona (часть дистрибутива Hugin) может использоваться идентично PTStitcher.
- Фильтр «Правильный радиальный сдвиг» в плагинах Panorama Tools для GIMP или Photoshop использует те же параметры a, b и c, что и PTStitcher. Обратите внимание, что он не знает о параметрах сдвига d и e и вместо этого использует ‘d’ в качестве общего коэффициента масштабирования, который должен быть d = 1-(a+b+c), чтобы сохранить изображение примерно одного размера. Если вам нужно сместить центр коррекции, как с параметром d & e, вы должны комбинировать его с Вертикальным смещением и/или Горизонтальным смещением.
- PTLens — это подключаемый модуль Photoshop и автономный инструмент Windows, который использует те же параметры a, b и c и поставляется с базой данных популярных объективов.
- Clens — это версия PTLens для командной строки.
- fulla — это инструмент командной строки, который использует те же параметры a, b, c и d для исправления бочкообразной дисторсии.
 Он также может одновременно исправлять хроматические аберрации и виньетирование.
Он также может одновременно исправлять хроматические аберрации и виньетирование.
- PTShift определяет различные параметры a, b и c для трех цветовых каналов, чтобы исправить хроматическую аберрацию с помощью фильтра Correct Radial Shift.
- Широкоугольный плагин GIMP использует совершенно другую формулу для исправления искажений.
- Плагин GIMP phfluuh — еще один инструмент, который исправляет искажения объектива, используя еще одну формулу.
- CamChecker — это инструмент для автоматического определения дисторсии объектива и генерации отличного от всего остального набора параметров.
- Distortion Remove использует совершенно другой подход с матрицей искажения. Страница только на немецком языке: http://www.stoske.de/digicam/Artikel/verzeichnung.html
См. также
Модель позиционирования изображения
Что такое искажение объектива в фотографии? Как избежать или исправить
Нам всем нужна камера с максимально возможным количеством мегапикселей. Но качество фотографий — это гораздо больше, чем разрешение. От размытости до плохой композиции и хроматических аберраций — есть много вещей, которых следует избегать, чтобы получать фотографии отличного качества.
Но качество фотографий — это гораздо больше, чем разрешение. От размытости до плохой композиции и хроматических аберраций — есть много вещей, которых следует избегать, чтобы получать фотографии отличного качества.
Одной из таких проблем, с которой вы часто сталкиваетесь, является дисторсия объектива. Если вы начинающий фотограф, скорее всего, вы даже не заметите этого. Но это хорошая идея, чтобы узнать, что это такое и необходимые шаги для решения этой проблемы.
Что такое дисторсия объектива?
Мы говорим, что фотография «искажена», когда линии и формы выглядят неправильно. Это происходит из-за проблем с вашим объективом или из-за конструкции объектива.
Линза состоит из множества оптических элементов, преломляющих и искривляющих световые лучи. Иногда геометрия объектива может вызвать искажение изображения. Дисторсия характерна для некачественных объективов, но даже дорогие объективы могут страдать от дисторсии.
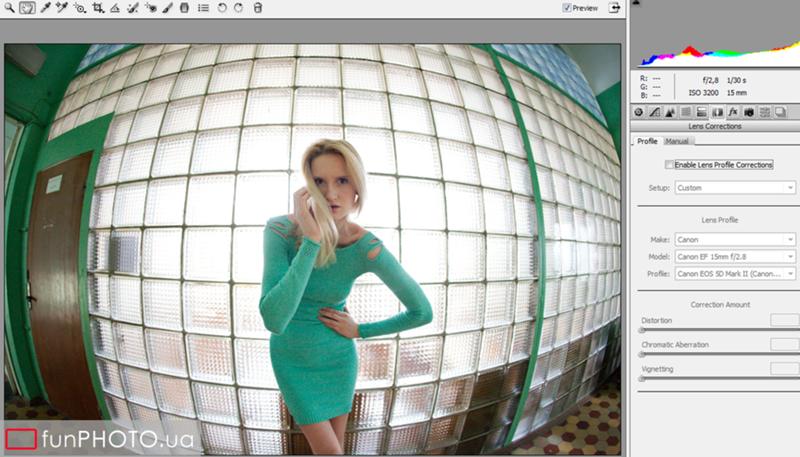
Если вы поклонник широкоугольных объективов, то знаете, что для них типична дисторсия. Это связано с тем, что поле зрения сенсора вашей камеры часто меньше, чем у широкоугольного объектива, поэтому края изображения выглядят искаженными. Тем не менее, у широкоугольного объектива есть несколько преимуществ. Объективы типа «рыбий глаз» предназначены для целенаправленного искажения фотографий.
Это связано с тем, что поле зрения сенсора вашей камеры часто меньше, чем у широкоугольного объектива, поэтому края изображения выглядят искаженными. Тем не менее, у широкоугольного объектива есть несколько преимуществ. Объективы типа «рыбий глаз» предназначены для целенаправленного искажения фотографий.
Типы искажения объектива
Прежде чем узнать, как исправить дисторсию объектива, вы должны знать типы дисторсии. Для разных типов искажений потребуются разные методы коррекции.
Существует два основных типа дисторсии объектива.
Оптическое искажение
Этот тип искажения возникает из-за оптики вашего объектива. Стандартный объектив должен быть прямолинейным, в котором прямые линии выглядят как прямые без каких-либо искажений. Однако, если линза криволинейна, прямые линии кажутся изогнутыми. Линза типа «рыбий глаз» — идеальный пример криволинейной линзы.
Несмотря на то, что стандартные линзы имеют прямолинейную форму, все линзы имеют разную степень искажения.
Оптические искажения могут возникать тремя способами.
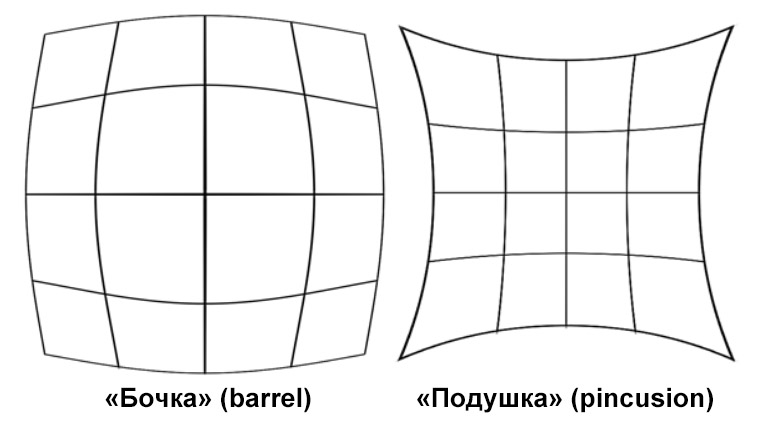
Бочкообразная дисторсия
Кредит изображения: WolfWings/Wikimedia CommonsПри этом типе искажения прямые линии выпячиваются наружу, принимая форму бочки. Бочкообразное искажение часто возникает в широкоугольных и широкоугольных зум-объективах, потому что их поле зрения часто больше, чем сенсор камеры. Таким образом, углы оказываются сплющенными в кадре.
Когда ваш объектив имеет бочкообразную дисторсию, изображения выглядят так, как будто они вытянуты в середине, но сжаты в углах.
Подушкообразное искажение
Кредит изображения: WolfWings/Wikimedia Commons Представьте себе подушечку для булавок — вы можете видеть, как булавка втягивает углы внутрь. Точно так же вы заметите, что прямые линии изгибаются внутрь при искажении подушечки для булавок. Это выглядит как полная противоположность бочкообразной дисторсии. И виновниками этого являются противоположность широкоугольных объективов — телеобъективов, особенно зум-объективов.
Телеобъектив с зумом непропорционально увеличивает объекты в углах изображения, поэтому вы видите вытянутые углы, но сжатую середину.
Искажение усов
Кредит изображения: WolfWings/Wikimedia CommonsЭтот тип искажения представляет собой комбинацию бочкообразного и подушкообразного искажения. При искажении усов прямые линии в углах изгибаются внутрь, а линии в центре выпячиваются наружу, напоминая усы.
Это сложное искажение, которое достаточно сложно исправить, но чаще всего с ним можно столкнуться только в старых объективах.
Перспективное искажение
Изображение предоставлено Zora/Wikimedia CommonsЭтот тип искажения не имеет ничего общего с вашим объективом. Вместо этого это происходит из-за положения камеры и расстояния до объекта.
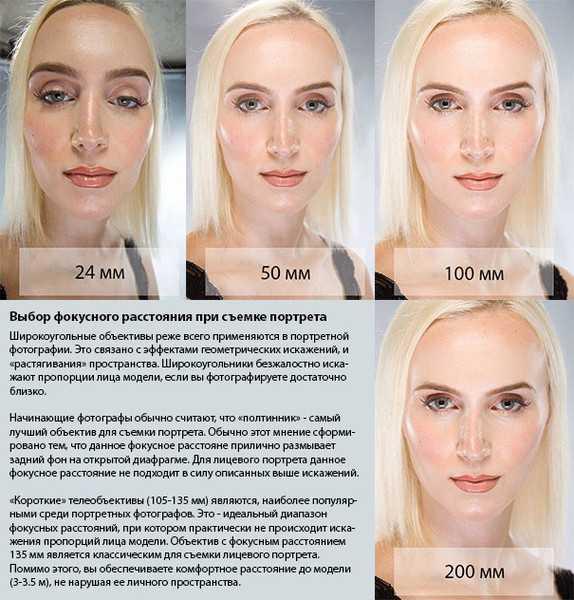
Расширение (широкоугольный) Искажение
Пробовали ли вы использовать широкоугольный объектив для портретных фотографий? Вы, вероятно, возненавидели бы результат. Широкоугольный объектив может сделать лица неестественно большими. Но это не вина широкоугольного объектива. Проблема в том, что вы находитесь слишком близко к объекту съемки.
Широкоугольный объектив может сделать лица неестественно большими. Но это не вина широкоугольного объектива. Проблема в том, что вы находитесь слишком близко к объекту съемки.
Как правило, объекты, находящиеся очень близко к вам, кажутся больше. Это потому, что вы склонны оставаться слишком близко к объекту с широкоугольным объективом. Когда вы используете телеобъектив, вы вынуждены отступить от объекта. Вот почему телеобъективы являются одними из предпочтительных объективов для портретных фотографий.
Короче говоря, искажение расширения увеличивает расстояние между передним планом и фоном.
Кроме того, когда вы используете широкоугольные объективы для фотографирования высоких зданий, они имеют тенденцию казаться широкими внизу и сливаться вверху. Происходит это из-за угла зрения, и ближайшая к вам часть кажется непропорционально больше.
Сжатие (телефото) Искажение
При компрессионном искажении удаленные объекты кажутся необычно большими. По сути, это противоположно искажению расширения и происходит в телеобъективах с зумом.
По сути, это противоположно искажению расширения и происходит в телеобъективах с зумом.
Компрессионное искажение сокращает расстояние между передним планом и фоном, делая изображение сжатым.
Как исправить искажение объектива
Вы можете исправить распространенные искажения, такие как бочкообразность и подушечка для булавок, с помощью программного обеспечения для постобработки. Например, в Lightroom есть опция «Коррекция объектива». Когда вы установите флажок «Включить коррекцию профиля», программа может найти ваш объектив в базе данных с метаданными и автоматически применить коррекцию. Вот руководство по использованию коррекции объектива в Lightroom.
Искажение усов, с другой стороны, потребует специального программного обеспечения для исправления.
Для исправления искажения перспективы лучше всего проверить расстояние между вами и вашим объектом и настроить его соответствующим образом. Например, не подходите слишком близко к объекту съемки при использовании широкоугольного объектива, чтобы избежать искажений от расширения.