Пример расчета однолинзового объектива в Zemax / Хабр
Может так случится, что кому-то понадобится рассчитать простенький фотообъектив для своихПостановка задачи и исходные данные
Предположим, что наш будущий объектив будет находиться на геостационарной орбите на высоте 35 786 км. Угловое поле объектива должно быть таким, чтобы в него попадала вся Земля. Ни больше, ни меньше. Приемником будет служить фотодиод с размерами 10мм х 10мм = 100мм2. Диаметр входного зрачка (в данном случае это диаметр первой поверхности первого и единственного оптического элемента) составляет 20 мм.
Оптическая схема
Для построения оптической схемы нам нужно определить требуемое угловое поле системы и фокусное расстояние.
Угловое поле системы
Нам известно расстояние от поверхности Земли до входного зрачка нашей системы и средний диаметр Земли.
 Из этих данных можно рассчитать угловое поле системы.
Из этих данных можно рассчитать угловое поле системы.Среднее значение диаметра Земли D = 12 742 км (R=6 371 км)
Расстояние от поверхности земли до объектива = 35 786 км
Угловое поле нашей системы составляет 17,2 градуса.
Фокусное расстояние из этой формулы составит F’ = 33,2 мм.
Рис. Принципиальная схема
Отлично! Больше половины работы уже сделано.
Сбор дополнительных параметров для расчета
Для начала необходимо проверить имеющиеся данные.
Мы знаем:
— количество кривых поверхностей системы,
— диаметр входного зрачка системы,
— требуемый фокус системы.
Мы пока не знаем:
— толщину оптического компонента,
— марку стекла оптического компонента,
— длина волны, на которой будет работать оптическая система.
Можно выбрать эти данные самостоятельно. Но представим, что мы работаем на каком-то передовом предприятии, которое осваивает космос 🙂
Толщина оптического компонента
Меня учили в институте, что минимальная толщина оптического компонента по оси должна составлять минимум 10% от величины диаметра.
 Если рассчитывать оптический компонент с небольшим отрицательным фокусов (скорее всего это двояковогнутая линза), то толщины по оси в 10% от диаметра вполне хватит. В нашем случае мы имеем собирающую линзу формирующую действительное изображение ( в рассеивающей линзе изображение мнимое) с положительным фокусом. Соотвественно, необходимо выбрать толщину линзы с учетом стрелок прогиба поверхностей, которые будут увеличивать толщину компонента по оси. Для первого приближения возьмем 20% от диаметра. В нашем случае толщина компонента для расчетов составит:
Если рассчитывать оптический компонент с небольшим отрицательным фокусов (скорее всего это двояковогнутая линза), то толщины по оси в 10% от диаметра вполне хватит. В нашем случае мы имеем собирающую линзу формирующую действительное изображение ( в рассеивающей линзе изображение мнимое) с положительным фокусом. Соотвественно, необходимо выбрать толщину линзы с учетом стрелок прогиба поверхностей, которые будут увеличивать толщину компонента по оси. Для первого приближения возьмем 20% от диаметра. В нашем случае толщина компонента для расчетов составит:Толщина линзы = 20мм х 20% = 4мм
Выбор марки стекла
Предположим, что специалист по радиационной стойкости рекомендовал использовать радиационностойкое стекло. А специалист-тепловик рекомендовал использовать материал стекла с наименьшим показателем теплового расширения, так как оправа для линзы будет из титана или суперинвара. Вообщем, они еще не определились.
 Сказано — сделано!
Сказано — сделано! Выбор длины волны
Вроде бы почти все данные ест. Карамба! А как же данные о спектральном диапазоне работы системы?! Мы проявляем инициативу и сами идем к разработчикам и получаем необходимую информацию. После этого выжидаем пару дней и занимаемся другими полезными делами. На третий день приходит разработчик и говорит, что решили изменить основную длину волны для объектива. Сказано-сделано! Рабочая длина волны = 0,644 мкм. Теперь можно продолжать наш оптический расчет.
Расчет системы с помощью Zemax
Программное обеспечение Zemax здорово упрощает жизнь расчетчикам оптических систем. Это не значит, что ПО сама спроектирует за вас крутую оптическую систему. Но при проектировании оптических систем, когда необходимо проанализировать достаточное количество вариантов, Zemax помогает значительно сократить время в разработке. Считаю, что программа для расчетчиков незаменимая. Конечно же, с одним условием, что у вас куплена оригинальная лицензия 😉 Сейчас не буду вдаваться в подробности описания всех прелестей программы, а сразу покажу ее в деле.

При загрузке программы в первую очередь необходимо ознакомится с окном Lens Data Editor:
Данное окошко содержит информацию о текущей оптической системе. Набор данных похож на формат оптического выпуска, с которым, лично я, познакомился еще в институте 🙂
Из имеющихся данных на текущий момент мы здесь можем указать пока только количество поверхностей для трассировки лучей, толщины и марку стекла. В качестве марки стекла выберем представление данных в виде модели, в которой необходимо задать коэффициент преломления для выбранной длины волны для нашего стекла. Так как марка выбранного стекла КУ-1 у нас из отечественного ГОСТа, то данные необходимо искать именно в нем ( в нашем случае ГОСТ 15130-86 «Стекло кварцевое оптическое» ).
Показатель преломления для стекла КУ-1 для длины волны 0,644 мкм составляет 1,4567. Стоит отметить, что это при температуре +20 градусов по Цельсию. А у нас как раз на борту обогрев до +20 градусов 🙂
Итого, на данный момент имеем:
В окне General во вкладке Aperture указываем диаметр входного зрачка 20мм:
Указываем угловое поле системы:
Настройка автоматической оптимизации
При расчете системы мы воспользуемся Optimization, которая встроена в Zemax.

Во-первых, указываем параметры, которые у нас смогут изменяться во время оптимизация. В нашем случае такими являются радиусы кривизны поверхностей линзы:
Во-вторых, необходимо сформировать оценочную функцию текущей системы (Default Merit Function).
Сформируем оценочную функцию на основе RMS. Здесь данный параметр показывает среднеквадратичное отклонение лучей волнового фронта при трассировке лучей.
При оптимизации мы укажем единственный параметр, к которому будем стремиться — требуемое фокусное расстояние. Для этого добавляем параметр EFFL и указываем следующие настройки:
Теперь, когда все параметры заданы, можно использовать функцию оптимизации.
В данном окне можно вручную управлять количеством итераций при подборке наиболее лучшего варианта. Либо можно использовать автоматический расчет для нахождения лучшего варианта.
Оптимизируем. Жмем Exit.
Теперь можно посмотреть что получилось.
Вроде бы неплохо 🙂
Но итоговый фокус системы равен 33,67 мм, что немного отличается от заданного — 33,2 мм.
Как получить требуемый фокус?
Чем выше будет значение Weight в параметре EFFL, тем выше будет приоритет этого параметра при расчете.
У меня при параметре Weight = 100 000 оптимизированный фокус получился 33,21 мм. Не привожу последовательность, так как она аналогична вышеуказанной.
Итог
Поставленные требования выполняются. Ура! 🙂
P.S. Я еще не успел освоить весь функционал программы. Да и оптических систем я не особо много рассчитал за все время, поэтому извиняйте если что не так. Комментарии и замечания приветствуются 🙂
P.P.S. Это мой первый пост, поэтому не знал в какой топик лучше разместить. Если не прав, то подскажите куда перенести. Спасибо.
РАСЧЕТ ФОКУСНОГО РАССТОЯНИЯ ОБЪЕКТИВА | ООО «Техносервис»
РАСЧЕТ ФОКУСНОГО РАССТОЯНИЯ ОБЪЕКТИВА ПО УГЛУ ОБЗОРА
Для выбора объектива под конкретную задачу необходимы следующие данные:
1. Размер зоны наблюдения, т.е. размеры и расстояние до объекта наблюдения. Если эти данные известны, то необходимое фокусное расстояние вычисляется по следующим формулам:
где f- фокусное расстояние
v- вертикальный размер матрицы
V- вертикальный размер объекта
S- расстояние до объекта
h- горизонтальный размер матрицы
H- горизонтальный размер объекта.

|
Формат матрицы |
1/3″ |
1/4″ |
|
вертикальный размер, мм |
3,6 |
2,4 |
|
горизонтальный размер, мм |
4,8 |
3,2 |
Также Вы можете использовать online расчет объектива на нашем сайте
|
Пример. f= 4,8*25/15=7,99 мм. Следовательно, выбираем объектив с фокусным расстоянием 8 мм. |
3. Формат матрицы видеокамеры.
Видеокамеры с матрицей 1/3″ могут работать с объективами 1/2″ и 1/3″. Видеокамеры 1/2″, только с объективами 1/2″.
4. Необходимость изменения угла поля зрения в процессе работы.
Углы обзора 1/3″ видеокамер.
Все приведенные в таблице данные приблизительные и даны в качестве начальной справки.
| Объектив (фокусное расстояние), мм | Угол обзора по вертикали, град | Угол обзора по горизонтали, град | Угол обзора по диагонали, град | Дистанция распознавания, м | Дистанция наилучшего качества |
| 2,5 | 90 | 120 | 150 | 2 | 0,7 |
| 2,9 | 78 | 104 | 130 | 3 | 1,2 |
| 3,4 | 70 | 94 | 110 | 3,4 | 1,4 |
| 3,5 | 63 | 79 | 98 | ||
| 3,6 | 54 | 72 | 92 | 3,5 | 1,5 |
| 3,7 | 52 | 70 | 90 | 3,8 | 1,6 |
| 4,0 | 48 | 65 | 75 | ||
| 4,3 | 47 | 62 | 73 | 4 | 1,8 |
| 5,5 | 40 | 55 | 70 | 5 | 2 |
| 6,0 | 32 | 42 | 53 | 6 | 2,3 |
| 8,0 | 24 | 32 | 40 | 8 | 3 |
| 12,0 | 17 | 22 | 28 | 12 | 4 |
| 16,0 | 12 | 17 | 21 | 16 | 6 |
| 25,0 | 8 | 11 | 14 | 25 | 10 |
| 50,0 | 4 | 5,5 | 7 | 50 | 20 |
| 75 | 2,8 | 3,7 | 4,6 | 70 | 30 |
Фокусное Расстояние Камеры Видеонаблюдения
Фокусное расстояние камеры видеонаблюдения — это параметр объектива видеокамеры, который мы берем за основу при расчете зоны видеонаблюдения. От его величины и физического размера матрицы зависит угол обзора объектива. Проведя не сложные геометрические расчеты можно довольно точно определить зону, которая будет попадать в кадр камеры видеонаблюдения.
От его величины и физического размера матрицы зависит угол обзора объектива. Проведя не сложные геометрические расчеты можно довольно точно определить зону, которая будет попадать в кадр камеры видеонаблюдения.
Для ведения видеонаблюдения на обширном участке используются камеры с широким углом обзора, а при просмотре объектов «зажатых», типа длинный коридор с узким.
Параметры, влияющие на угол обзора
Как уже писалось выше, три параметра видеокамеры взаимозависимы, это:
- Фокусное расстояние объектива;
- Угол обзора объектива;
- Физический размер матрицы видеокамеры.
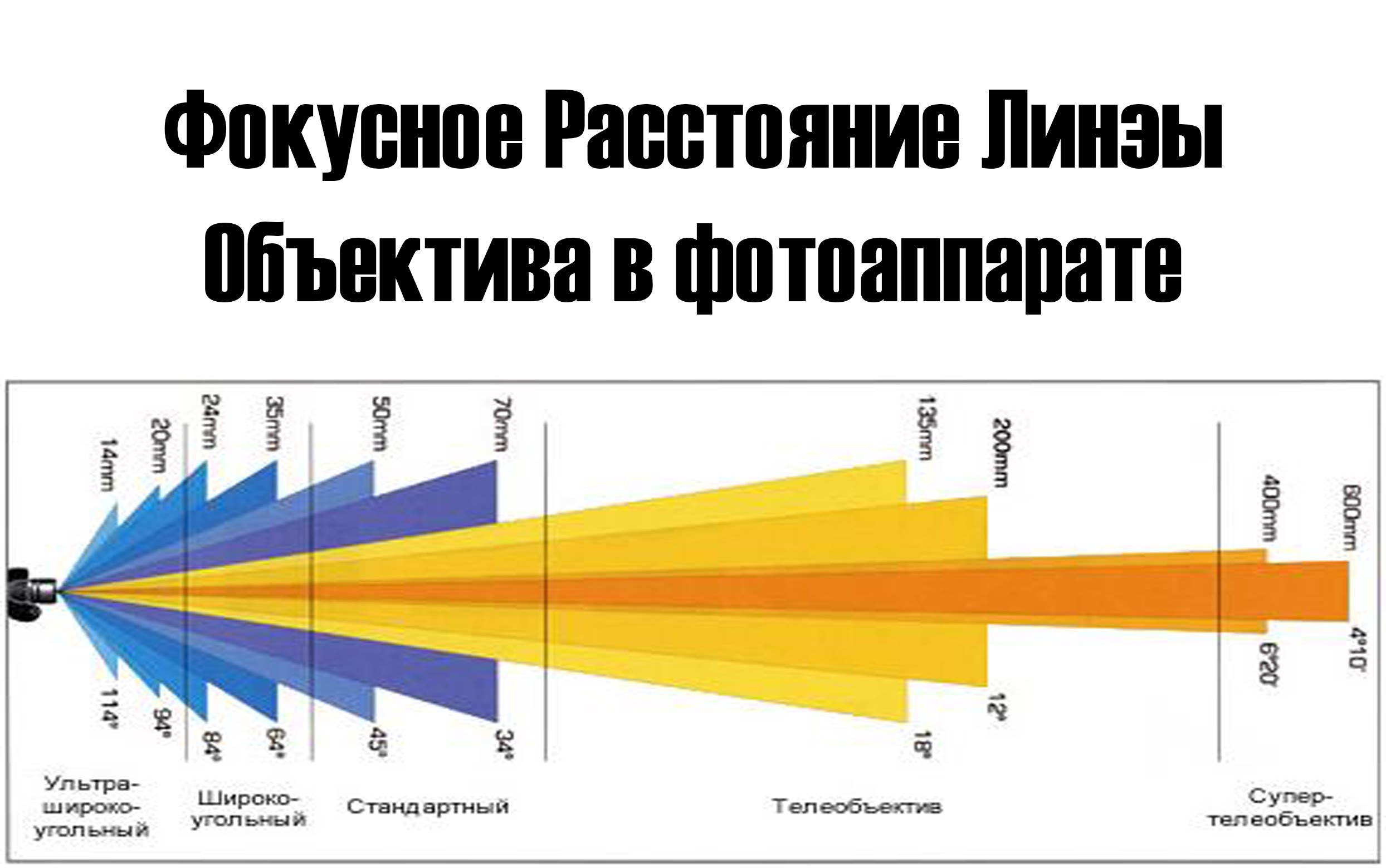
Чем больше фокусное расстояние объектива, тем меньше угол обзора. Следовательно, можно наблюдать за объектами, которые находятся на относительно большом удалении от камер видеонаблюдения. И наоборот, чем меньше фокусное расстояние, тем больше угол обзора. Соответственно в кадр камеры попадает больше объектов.
Угол обзора, также зависит от размера чувствительного элемента –матрицы. Чем больше размер матрицы, тем меньше угол обзора камеры и наоборот.
Чем больше размер матрицы, тем меньше угол обзора камеры и наоборот.
Расчет фокусного расстояния объектива видеокамеры
Расчет фокусного расстояния камеры видеонаблюдения необходим для правильного подбора видеокамеры. Конечно, производители указывают в технических характеристиках нам физический размер матрицы, фокусное расстояние и иногда угол обзора. Но для общего понимания, посмотрим, что влияет на выбор фокусного расстояния, это:
- На каком расстоянии находится объект наблюдения;
- Физического размера матрицы;
- Размера объекта.
Итак, имея заданные технические характеристики камеры, можно рассчитать фокусное расстояние объектива камеры видеонаблюдения по следующим формулам:
F= h*S/Н или F= v*S/V,
где h – размер матрицы по горизонту;
S – расстояние до объекта видеонаблюдения;
H – горизонтальный размер объекта;
v – размер матрицы по вертикали;
V – вертикальный размер объекта.
Размеры сторон матрицы камеры видеонаблюдения приведены в таблице:
| Размер матрицы | 1/4” | 1/3” | 1/2” |
| По горизонтали, мм | 3,2 | 4,8 | 6,4 |
| По вертикали, мм | 2,4 | 3,6 | 4,8 |
Пример расчета фокусного расстояния и выбор камеры
Необходимо наблюдать за въездом и проходом через ворота на территорию предприятия;
Задача наблюдения: обнаружение машин и людей при въезде входе на территорию предприятия;
Ширина прохода и ворот 6 метров;
Расстояние от камеры до прохода 7 метров;
Камера Proto AHD-1W-Eh20F(?)IR, после буквы F должно указываться фокусное расстояние. Его мы рассчитаем по вышеприведенной формуле:
Его мы рассчитаем по вышеприведенной формуле:
F=3.2*7/6=3,7 мм,
где 3,2 размер матрицы по вертикали, т.к. в камере Proto AHD-1W-Eh20F(?)IR установлена матрица размером 1/4”. Так как объективы на видеокамере выполнены с фиксированными фокусными расстояниями, то выбираем ближайший меньший т.к. если выбрать ближайший больший, то часть объекта не будет попадать в кадр камеры.
Выполним ещё одну проверку камеры на пригодность. Зона контроля имеет ширину 6 метров, задача стоит обнаружение. При обнаружении человека необходимо, чтобы на один метр контроля приходилось 20-30 пиксел разрешения камеры. При несложных расчетах видно, что камере Proto AHD-1W-Eh20F36IR по силам не только обнаружение, но и распознавание человека на объекте, не говоря уже о машинах. На самом деле ещё необходимо вычислить фокусное расстояние по вертикали, а также высоту и угол установки видеокамеры, но мы эти расчеты намеренно упускаем, т.к. мы не ставим перед собой задачу полного расчета, мы хотели показать на данном примере только методику расчета фокусного расстояния и выбора камеры по этому расчету.
Скачать таблицу «Зависимость углов обзора от фокусного расстояния и размера матрицы» в формате .xlsx
Для расчетов основных параметров камер видеонаблюдения можно использовать бесплатный калькулятор, с помощью которого можно не только получить численные значения показателей, но и визуально определить, как будет выглядеть группа силуэтов людей в кадре. Скачать калькулятор можно здесь.
Часто возникают ситуации, когда нет возможности четко определить зону контроля видеокамерой, или возникает необходимость менять размер этой зоны, но с небольшой периодичностью. Бывает и так, что человек хочет на месте более точно определить зону контроля. В этих случаях поможет камера с вариофокальным объективом, на которых можно менять без особых проблем фокусное расстояние вручную. Если же у вас возникает потребность приблизить или отдалить объект оперативно, то можно использовать камеру с моторизированным объективом. Существуют камеры, позволяющие не только оперативно менять фокусное расстояние (приближать, отдалять объект), но и изменять ракурс видеонаблюдения в пределах 360 градусов по горизонтали и 180 градусов по вертикали. Такие камеры называются Speed doome, о них вы можете почитать в статье «Скоростные купольные камеры»
Такие камеры называются Speed doome, о них вы можете почитать в статье «Скоростные купольные камеры»
Есть камеры с коридорным режимом видеонаблюдения. Такая камера устанавливается вертикально, а изображение поворачивается на 90 градусов. Таким образом, на мониторе отображается картинка не горизонтально, а вертикально. При этом отражается больше «полезной» информации, чем это было бы при нормальном расположении камеры.
Статьи
- Как выбрать камеру видеонаблюдения?
- Настройка аналоговых видеокамер. OSD-меню.
- Технология PoE (Power over Ethernet)
- AHD DVR. Сравнение режимов 12fps и 25fps. (видео)
- AHD технология: качество 720p/1080p по коаксиалу на 500 м без задержек и потерь
- Технология Intelligent Heater
Расчет объектива малогабаритного тепловизора Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
ОПТИКА
J
УДК 621. 384.3
384.3
РАСЧЕТ ОБЪЕКТИВА МАЛОГАБАРИТНОГО ТЕПЛОВИЗОРА Н.Н. Кулакова, С.В. Мишин
МГТУ им. Н.Э. Баумана, Москва, Российская Федерация e-mail: [email protected]; [email protected]
Тепловизионные приборы имеют широкую область применения. Однако их недостатками являются большие габаритные размеры и масса. Цель настоящей работы — расчет объектива для малогабаритного тепловизора с вероятностью обнаружения объектов на дальности более 500м не менее 50%. Рассмотрена методика расчета объектива малогабаритного тепловизора, который проводился путем оптимизации конструктивных параметров выбранного объектива-аналога. Оптимизация, а также расчет допусков на изготовление объектива, его сборку и юстировку осуществлены с помощью программы Zemax. В результате была получена конструкция объектива, которая наряду с малыми габаритными размерами имеет высокотехнологичную конструкцию, что позволяет существенно расширить область применения тепловизоров.
Ключевые слова: объектив, тепловизор, аберрации, оптимизация, приемник излучения, пятно рассеяния.
CALCULATION OF A LENS FOR A SMALL-SIZE INFRARED CAMERA N.N. Kulakova, S.V. Mishin
Bauman Moscow State Technical University, Moscow, Russian Federation e-mail: [email protected]; [email protected]
Thermal imaging units have a wide area of application. However, large dimensions and mass are their drawbacks. This work is aimed at the lens calculation for a small-size infrared camera with a probability of no less than 50 % to detect objects at a distance of more than 500 m. A technique is considered for calculating a lens of the small-size infrared camera by means of optimization of structural parameters of the selected lens prototype. The optimization and also the calculation of tolerances for manufacturing the lens, its assembling and alignment are performed using the Zemax software. As a result, the lens structure is obtained that (in addition to small dimensions) has the hi-tech construction, which allows the sphere of application of thermal imaging units to be substantially broaden.
As a result, the lens structure is obtained that (in addition to small dimensions) has the hi-tech construction, which allows the sphere of application of thermal imaging units to be substantially broaden.
Keywords: lens, infrared camera, aberrations, optimization, emission receiver, spot of scattering.
В современном оптическом приборостроении широко распространены приборы, работающие в инфракрасной области спектра [1, 2]. Однако приборы, изготовляемые отечественной промышленностью, имеют значительные массу и габаритные размеры. В связи с этим была поставлена задача расчета параметров малогабаритного тепловизора, общая длина которого не превышала бы 200 мм. Тепловизор представляет собой оптико-электронный прибор, преобразующий тепловое излучение спектрального диапазона А = 3 … 5 мкм в видимое
излучение. Прибор предназначен для наблюдения теплового излучения различных объектов и их обнаружения. Таким образом, прибор может быть использован в нефтеперерабатывающей промышленности, энергетике, пищевых производствах, системах охраны [3].
Таким образом, прибор может быть использован в нефтеперерабатывающей промышленности, энергетике, пищевых производствах, системах охраны [3].
Оптическая система прибора должна состоять из объектива и канала визуализации. Настоящая статья посвящена расчету параметров объектива малогабаритного тепловизора. В соответствии с техническим заданием (ТЗ) оптическая схема прибора имеет следующие характеристики:
Фокусное расстояние /’, мм ……………. 74
Угловое поле 2ш, град …………………. 5
Относительное отверстие В//’………….. > 1/2
Спектральный диапазон Л, мкм………….. 3… 5
Общая длина оптической системы объектива
Ьоб, мм. ……………………………… < 150
……………………………… < 150
Минимальная обнаруживаемая разность температур А Т, К………………………… 0,25
Дальность, мм:
обнаружения ……………………….. > 500
распознавания объекта Ь……………… 352
Вероятность Р обнаружения объекта на дальности более 500 м, %…………………… 50
Приемник излучения…………………… 64-элементная линейка фоторезисторов ФУР129Л с размерами чувствительного элемента 0,1 х х0,1 мм
Условия эксплуатации тепловизора:
1) безотказная наработка не менее 300 ч;
2) диапазон значений рабочей температуры ¿0 = -20 . .. + 40° С;
.. + 40° С;
3) тепловизор должен сохранять работоспособность при относительной влажности не более 80% и температуре 20 °С.
Методика расчета объектива малогабаритного тепловизора состоит из следующих этапов.
1. Выбор типа оптической схемы и значений параметров объектива (/’; 2ш; Б//’; А; Ьоб), а также вероятности обнаружения объектов Р и размеров чувствительного элемента приемника излучения. Значения перечисленных параметров объектива приведены в ТЗ.
Анализ патентных материалов, проведенных в работах [4-7], позволил определить структуру оптической схемы, применяемой для расчета объектива малогабаритного тепловизора. Представляет интерес вариант объектива, оптическая схема которого приведена на рис. 1. Конструктивно объектив состоит из двух групп менисковых линз. Первая группа — положительная линза 1 и отрицательная линза 2. Между
Первая группа — положительная линза 1 и отрицательная линза 2. Между
ними расположена апертурная диафрагма (АД). Первые поверхности линз являются выпуклыми. Вторая группа — положительная линза 3 и отрицательная линза 4. Линзы обращены друг к другу вогнутыми поверхностями. Группы линз разделены сканирующим зеркалом (СЗ). Параллельный пучок инфракрасного излучения попадает в первую группу линз. Далее пучок лучей падает на СЗ. Исходя из конструктивных соображений, оно расположено под углом 45° к оптической оси, что уменьшает габариты оптической системы прибора, а также дает возможность построчно сканировать объект. После зеркала излучение, пройдя вторую группу линз, попадает на приемник излучения (ПИ). Конструктивные параметры объектива-аналога приведены в табл. 1.
Таблица 1
Значения конструктивных параметров объектива-аналога
Номер поверхностей Радиус, мм Толщина, мм Показатель преломления Материал Световой диаметр, мм
1 72,780 6,0 3,42530 Кремний 1А2 КЭФ 25/2,5-76 60,6
2 108,898 34,0 1,00000 Воздух 60,6
3 219,788 3,0 4,02475 Германий ГМ0-1-40 36,8
4 74,461 50,0 1,00000 Воздух 35,4
5 44,164 5,0 3,42530 Кремний 1А2 КЭФ 25/2,5-76 47,8
6 86,088 7,5 1,00000 Воздух 46,8
7 -79,055 3,0 1,41099 Флюорит 45,4
8 -204,200 24,8 1,00000 Воздух 41,9
2. Использование в качестве критерия качества изображения объектива диаметр пятна рассеяния. Для определения значения указанного диаметра воспользуемся теоремой Джонсона [3], согласно которой для обнаружения объектов с вероятностью Р не менее 50 % объектив
Использование в качестве критерия качества изображения объектива диаметр пятна рассеяния. Для определения значения указанного диаметра воспользуемся теоремой Джонсона [3], согласно которой для обнаружения объектов с вероятностью Р не менее 50 % объектив
Рис. 1. Оптическая схема исследуемого объектива:
1-4 — линзы; АД — апертурная диафрагма; СЗ — сканирующее зеркало; ПИ — приемник излучения
Рис. 2. Диаграммы пятна рассеяния исходного объектива (RMS Radius — сред-неквадратический радиус пятна рассеяния, мкм)
должен формировать пятно рассеяния, которое будет охватывать не менее двух чувствительных элементов приемника излучения. Таким образом, пятно рассеяния рассчитываемого объектива должно иметь диаметр 0,2 мм.
3. Анализ аберраций объектива-аналога. Расчет аберраций выполним по программе Zemax [8]. Диаграммы пятна рассеяния представлены на рис. 2; поперечная сферическая аберрация для точки на оси — на рис. 3, а, поперечные аберрации для точки вне оси — на рис. 3, б.
Анализ аберраций объектива-аналога. Расчет аберраций выполним по программе Zemax [8]. Диаграммы пятна рассеяния представлены на рис. 2; поперечная сферическая аберрация для точки на оси — на рис. 3, а, поперечные аберрации для точки вне оси — на рис. 3, б.
Результаты расчета показали, что объектив-аналог хотя и имеет малые габаритные размеры, но качество его изображения не соответствует установленному критерию. Согласно рис. 2, диаметр пятна рассеяния составляет 0,6 мм, а требуемое значение должно быть равно 0,2 мм.
4. Поиск оптимального решения оптической схемы объектива с помощью синтеза объектива на основе различных моделей оценочных функций с применением прикладной программы Zemax, которая позволяет проводить анализ и оптимизацию оптических систем различного назначения [8]. В программе имеется возможность оценки качества изображения по выбранному в рассматриваемой методике расчета критерию качества изображения. Этому критерию в программе соответствует среднеквадратический радиус пятна рассеяния (RMS Spot Radius).
Этому критерию в программе соответствует среднеквадратический радиус пятна рассеяния (RMS Spot Radius).
Для оптимизации были выбраны операторы, которые контролируют при расчете заданные значения поперечной сферической аберрации, комы, заднего фокусного расстояния и общей длины оптической
Рис. 3. Поперечная сферическая аберрация Ау’ для точки на оси (а) (масштаб графика по осям ±2000 мкм) и поперечные аберрации для точки вне оси (б) (масштаб графика по осям ±200 мкм): РУ, РХ — относительные координаты во входном зрачке
системы. Это операторы TRAC, COMA, EFFL и TOTR соответственно. Для операторов TRAC (поперечная сферическая аберрация) и COMA (меридиональная кома) значения равны нулю, для оператора EFFL (заднее фокусное расстояние) — 74 мм, для оператора TOTR — 135 мм.
Вычисление значения критерия проведено для центра тяжести лучей в каждой точке поля. Центр тяжести лучей в программе обозначен Centroid. Алгоритм оптимизации минимизирует оценочную функцию, состоящую из приведенных выше операторов оптимизации.
Центр тяжести лучей в программе обозначен Centroid. Алгоритм оптимизации минимизирует оценочную функцию, состоящую из приведенных выше операторов оптимизации.
В программе Zemax в меню Editors (редакторы) присутствует пункт Default Merit Function (задание оценочной функции оптимизации), с помощью которого появляется таблица с выбранными операторами оптимизации и их значениями. В этой таблице необходимо указать требуемые значения операторов, которые должны быть получены при оптимизации. После проведения оптимизации были определены конструктивные параметры объектива (табл. 2).
Значения таких параметров объектива, как f’, 2ш, D/f’, Л и Ьоб соответствуют значениям, приведенным в ТЗ.
Таблица 2
Расчетные значения конструктивных параметров объектива
Номер по- Радиус, мм Толщина, Показатель Материал Световой
верхностей мм преломления диаметр, мм
1 96,350 6,0 3,42530 Кремний 1А2 КЭФ 25/2,5-76 48,3
2 185,667 34,0 1,00000 Воздух 46,6
3 -939,476 3,0 4,02475 Германий ГМ0-1-40 26,4
4 144,037 50,0 1,00000 Воздух 26,1
5 58,394 5,0 3,42530 Кремний 1А2 КЭФ 25/2,5-76 34,2
6 175,204 7,5 1,00000 Воздух 33,0
7 -70,507 3,0 1,41099 Флюорит 28,1
8 -120,772 24,8 1,00000 Воздух 28,4
5. Оценка качества изображения рассчитанного объектива по заданному критерию. Характеристики качества рассчитанного объектива представлены на рис. 4 и 5.
Оценка качества изображения рассчитанного объектива по заданному критерию. Характеристики качества рассчитанного объектива представлены на рис. 4 и 5.
Согласно анализу представленных графиков, диаметр пятна рассеяния составляет 0,05 мм. Полученное значение существенно ниже требуемого (0,2 мм). Как следует из теории Джонсона, при таком диаметре пятна рассеяния не будет обеспечена заданная вероятность обнаружения Р = 50 %. Однако такое значение диаметра (0,05 мм) дает идеальная оптимизированная система. Поэтому было принято решение рассчитать диаметр пятна рассеяния для реальной системы, т.е. с учетом погрешностей изготовления, сборки и юстировки элементов объектива.
г w — 0 deg w — 1.7 deg • 3.0300 — Ч Мв0 = s. егааи
■3 в га Ш w> 1ч/Я
[Hfl: 0,008 0.009 HH IHH: 0.0M. 1.530 HI
w = 2. 5 deg
5 deg
suemcE: inn Dfl: 0,000, a, 17B »1
SPOT DIAGRAM
TUE OCT 29 2013 UNITS RRE pa. FIELD ■ 1 2 RMS RADIUS i 19.944 21,291 3 25.191
Рис. 4. Диаграммы пятна рассеяния исходного объектива (RMS Radius — сред-неквадратический радиус пятна рассеяния, мкм)
Рис. 5. Поперечная сферическая аберрация А У для точки на оси (а) (масштаб графика по осям ±200 мкм) и поперечные аберрации для точки вне оси (б) (масштаб графика по осям ±200 мкм):
РУ, РХ — относительные координаты во входном зрачке
6. Расчет критерия качества изображения объектива с учетом допусков на его изготовление по методике, описанной в работе [9]. Результаты расчета допусков на конструктивные параметры рассчитанного объектива приведены ниже:
Допуск:
на радиусы кривизны поверхностей линз
при Л = 0,6328 мкм. …………………………………………………Пять колец Ньютона
…………………………………………………Пять колец Ньютона
толщину линз, мм……………………………………………………..±0,2
толщину воздушных промежутков, мм………………….±0,5
децентрировку поверхностей в линзах, мм…………..±0,1
децентрировку линз в оправах, мм…………………………±0,1
наклон линз в оправах, угл. мин…………………………….±3,0
Оценка результатов показала, что рассчитанный объектив с указанными диапазонами значений допусков обеспечивает требуемое значение диаметра пятна рассеяния, а следовательно, и заданную вероятность обнаружения объектов. Значения допусков показывают, что их можно получить в современном оптическом производстве [10, 11].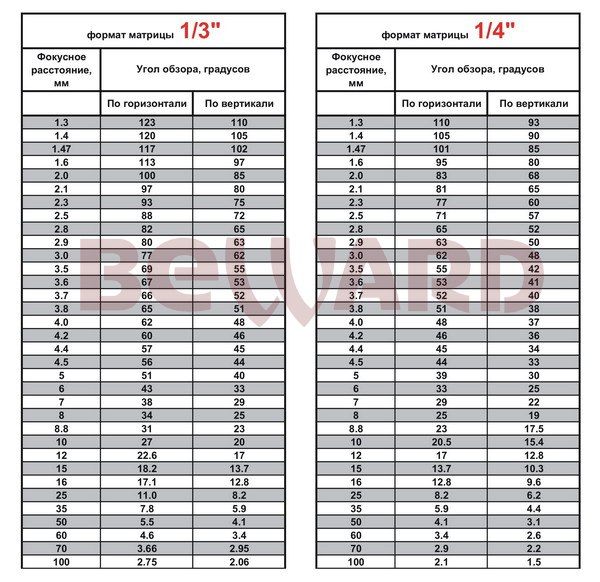 Согласно исследованиям, объектив, изготовленный с указанными допусками, формирует пятно рассеяния диаметром 0,2 мм (в соответ-ствиии с ТЗ). Кроме того, в процессе оптимизации были сохранены малые габаритные размеры оптической системы объектива. Таким образом, предлагаемая методика позволила рассчитать параметры объектива малогабаритного тепловизора, которые полностью удовлетворяют всем требованиям ТЗ. В заключение следует отметить широкие возможности программы Zemax, позволяющей проектировать, модернизировать и анализировать оптические системы различного назначения, что было доказано на примере расчета рассмотренного объектива малогабаритного тепловизора.
Согласно исследованиям, объектив, изготовленный с указанными допусками, формирует пятно рассеяния диаметром 0,2 мм (в соответ-ствиии с ТЗ). Кроме того, в процессе оптимизации были сохранены малые габаритные размеры оптической системы объектива. Таким образом, предлагаемая методика позволила рассчитать параметры объектива малогабаритного тепловизора, которые полностью удовлетворяют всем требованиям ТЗ. В заключение следует отметить широкие возможности программы Zemax, позволяющей проектировать, модернизировать и анализировать оптические системы различного назначения, что было доказано на примере расчета рассмотренного объектива малогабаритного тепловизора.
ЛИТЕРАТУРА
1. Бодров С.В. Методика расчета тепловизионного объектива // Электронный научно-технический журнал «Наука и образование». 2012. № 6. URL: http://technomag.bmstu.ru/doc/445463.html. DOI: 10.7463/0612.0445463 (дата обращения: 15. 10.2013).
10.2013).
2. Госсорг Ж. Инфракрасная термография. Основы, техника, применение; пер. с франц. М.: Мир, 1988. 452 с.
3. Тарасов В.В., Якушенков Ю.Г. Инфракрасные системы «смотрящего» типа. М.: Логос, 2004. 452 с.
4. Teraoka K., Fujii A., Izumi T. Lens unit and vehicle-mounted infrared lens unit. Patent No. US8456769 B2 Sumitomo Electric Industries, Ltd., Japan, Nov. 26, 2009.
5. Izumi T., Hiraiwa C. Infrared lens, infrared camera and night vision. Patent No. EP1980888 A1 Sumitomo Electric Industries, Ltd., Japan, Oct. 15, 2008.
6. Hiraiwa C., Izumi T. Infrared zoom lens and infrared camera with three lens groups. Patent No. EP2309298 A1 Sumitomo Electric Industries, Ltd., Japan, Apr. 13, 2011.
7. Watanabe Y, Ando Minoru., Kawaguchi K. Infrared Lens. Patent No. US20120212808 A1 Tamron Co, Ltd., Japan, Aug. 23, 2012.
Watanabe Y, Ando Minoru., Kawaguchi K. Infrared Lens. Patent No. US20120212808 A1 Tamron Co, Ltd., Japan, Aug. 23, 2012.
8. ZEMAX Optical Design Program. User’s Guide. Version February 22, 2008. ZEMAX Development Co., 2008, 732 p.
9. Кулакова Н.Н., Мишин С.В. Расчет допусков объектива тепловизи-онной системы // Инженерный журнал: наука и инновации. 2013. Вып. 7. URL: http://engjournal.ru/catalog/pribor/optical/831.html (дата обращения: 15.10.2013).
10. Сокольский М.М.Допуски и качество оптического изображения. Л.: Машиностроение, 1989. 221 с.
11. Справочник технолога-оптика / Под ред. М.А. Окатова. СПб.: Политехника, 2004. 679 с.
REFERENCES
[1] Bodrov S. V. Method of calculating a thermal lens. Elektr. Nauchno-Tehn. Izd. «Nauka i obrazovanie» MGTU im. N.E. Baumana [El. Sc.-Tech. Publ. «Science and Education» of Bauman MSTU], 2012, no. 6. Available at: http://technomag.bmstu.ru/doc/445463.html (accessed 15.10.2013) (in Russ.). DOI: 10.7463/1013.0612563
V. Method of calculating a thermal lens. Elektr. Nauchno-Tehn. Izd. «Nauka i obrazovanie» MGTU im. N.E. Baumana [El. Sc.-Tech. Publ. «Science and Education» of Bauman MSTU], 2012, no. 6. Available at: http://technomag.bmstu.ru/doc/445463.html (accessed 15.10.2013) (in Russ.). DOI: 10.7463/1013.0612563
[2] Gaussorgues Gilbert. La Thermographie Infrarouge. Principes-Technologie-Applications. 4 Ed. Paris, Lavoisier, 1999. 586 p. (Russ. Ed.: Gossorg Zh. Infrakrasnaya termografiya. Osnovy, tekhnika, primenenie [Gossorg J. Infrared thermography. Fundamentals, techniques, application]. Moscow, Mir Publ., 1988. 452 p.).
[3] Tarasov V.V., Iakushenkov Iu.G. Infrakrasnye sistemy «smotriashchego tipa» [Infrared systems of «looking» type]. Moscow, Logos Publ., 2004. 443 p.
[4] Teraoka K., Fujii A., Izumi T. Lens unit and vehicle-mounted infrared lens unit. Patent US, no. 8456769, 2009.
Patent US, no. 8456769, 2009.
[5] Izumi T., Hiraiwa C. Infrared lens, infrared camera and night vision. Patent EP, no. 1980888, 2008.
[6] Hiraiwa C., Izumi T. Infrared zoom lens and infrared camera with three lens groups. Patent EP, no. 2309298, 2011.
[7] Watanabe Y., Ando Minoru., Kawaguchi K. Infrared Lens. Patent US, no. 20120212808, 2012.
[8] ZEMAX Optical Design Program. User’s Guide. Version February 22,2008. ZEMAX Development Co., 2008. 732 p.
[9] Kulakova N.N., Mishin S.V. Tolerances calculating of the lens of thermal vision system. Elektr. nauchno-tehn. Izd. «Inzhenernyj zhurnal: nauka i innovacii» MGTU im. N.E. Baumana [El. Sc.-Techn. Publ. «Eng. J.: Science and Innovation» of Bauman MSTU], 2013, no. 7. Available at: http://engjournal. ru/catalog/pribor/optical/831.html (accessed 15.10.2013) (in Russ.).
ru/catalog/pribor/optical/831.html (accessed 15.10.2013) (in Russ.).
[10] Sokol’skij M.M. Dopuski i kachestvo opticheskogo izobrazhenija [Tolerances and quality of the optical image]. Leningrad, Mashinostroenie Publ., 1989. 221 p.
[11] Okatov M.A., Antonov Je A., Bajgozhin A., Bakaev M.I., Belova I. V., Bubis I.Ja., Vejdenbah V.A., Voroncova N M., Danilov S.V., Dudkina N.Ju., Duhopel I I., Kuznecov S.M., Kukleva Z.A., Listratova G.V., Lodygin B.I., Lysjanyj Ju.K., Ljubarskij S.V., Mihajlov A.V., Nazarova V.Ja., Ponfilenok E.I., Petrov B.I., Petrovskij G.T., Poveshhenko V.P., Pridatko G.D., Prohorchik S.M., Savushkin V.N., Sokolova R.S., Sujkovskaja G.G., Tarnovskaja L.V., Torbin I.D., Cherezova L.A., Chunin B.A., Shatilov A.V., Shepurev Je.I., Shirokshina Z.V., Jagmurov V.X. Spravochnik tehnologa-optika [Reference book of technologist-opticist] SPb, Politehnika Publ., 2004. 679 p.
Статья поступила в редакцию 12.12.2013 Надежда Николаевна Кулакова — канд. техн. наук, доцент кафедры «Оптико-электронные приборы научных исследований» МГТУ им. Н.Э. Баумана. Автор 40 научных работ в области оптико-электронного приборостроения. МГТУ им. Н.Э. Баумана, Российская Федерация, 105005, Москва, 2-я Бауманская ул., д. 5.
N.N. Kulakova — Cand. Sci. (Eng.), assoc. professor of «Optic-Electronic Research Instruments» department of the Bauman Moscow State Technical University. Author of 40 publications in the field of optic-electronic instrument engineering. Bauman Moscow State Technical University, Vtoraya Baumanskaya ul. 5, Moscow, 105005 Russian Federation.
Святослав Валерьевич Мишин — студент кафедры «Оптико-электронные приборы научных исследований» МГТУ им. Н.Э. Баумана. Автор двух научных работ в области оптико-электронного приборостроения.
МГТУ им. Н.Э. Баумана, Российская Федерация, 105005, Москва, 2-я Бауманская ул., д. 5.
S.V. Mishin — student of «Optic-Electronic Research Instruments» department of the Bauman Moscow State Technical University. Author of two publications in the field of optic-electronic instrument engineering.
Bauman Moscow State Technical University, Vtoraya Baumanskaya ul. 5, Moscow, 105005 Russian Federation.
Расчет фокусного расстояния объектива камеры видеонаблюдения — online калькулятор
online калькулятор
Смотреть пояснения
Требуемое фокусное расстояние объектива (мм): 0Угол обзора в горизонтальной плоскости (град):0
Ширина зоны обнаружения на заданной дистанции (м):0
КАК ПОЛЬЗОВАТЬСЯ
Фокусное расстояние камеры видеонаблюдения является основной ее характеристикой от которой непосредственно зависит угол обзора.
Это, в свою очередь влияет на степень детализации и возможность решения основных задач видеонаблюдения:
- идентификация незнакомого человека;
- чтение автомобильных номеров;
- опознание знакомых людей;
- обнаружение человека как такового.
Для достижения каждой из этих целей необходимо, чтобы объект занимал определенную часть экрана. Самые высокие требования предъявляются к идентификации незнакомцев, поскольку для этого требуется отображение незначительных по размеру частей лица.
Проще всего решается задача обнаружения человека, то есть возможность отличить его от других объектов наблюдения. Разрешение камеры видеонаблюдения играет при этом второстепенную роль (как это не кажется странным).
Что касается соотношения сторон матрицы. Если вы не можете найти этот параметр в паспорте или описании изделия, то ориентируйтесь на то, что раньше аналоговые видеокамеры имели отношение 4:3. Современные телекамеры высокого разрешения, например, AHD, используют величину 16:9. В любом случае, для предварительной прикидки разница не принципиальна.
Поскольку калькулятор может выдать фокусное расстояние, не соответствующее стандартному ряду значений, то брать нужно ближайшую величину. Имейте ввиду, если она будет больше расчетной, то зона контроля может уменьшиться, если меньше, то качество решаемой задачи будет хуже. Уточнить геометрические размеры зоны слежения можете здесь.
В начало
* * *
© 2014-2021 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер и не могут использоваться в качестве руководящих и нормативных документов.
Астрономический калькулятор: рассчитать увеличение телескопа онлайн
Существуют два понятия: максимально полезное увеличение телескопа и увеличение с выбранным окуляром. Полезное увеличение – это параметр, который показывает максимальную эффективность оптики. Пытаться добиться от телескопа большего не имеет смысла, так как при превышении этого значения качество картинки станет ухудшаться. Максимальное полезное увеличение высчитывается просто – умножаем диаметр объектива на два. Например, для телескопа с апертурой 70 мм, оно будет равно 140 крат. Максимальное увеличение телескопа с выбранным окуляром – это кратность, которую обеспечивает выбранный аксессуар на телескопе. Рассчитать его можно при помощи астрономического калькулятора.
Астрономический калькулятор
Онлайн-калькулятор поможет вычислить увеличение телескопа и подобрать подходящие окуляры. Заполните поля в разделе «Исходные параметры» и нажмите кнопку «Рассчитать».
Увеличение телескопа с указанным окуляром
Увеличение (крат)75-300x Выходной зрачок (мм)50Рекомендуемые увеличения
Максимальное (2D)Максимальное увеличение телескопа рассчитывается просто: нужно диаметр телескопа умножить на 2. На максимальном увеличении очень эффективно наблюдать тесные двойные звезды, а также выполнять юстировку телескопа. Кроме того, максимальное увеличение позволит подробно рассмотреть небольшие детали на поверхности планет и Луны в идеальных атмосферных условиях. При «сверхусилении» телескопа (т.е. при использовании увеличения, превышающего цифру максимального увеличения телескопа) наблюдаемое изображение будет нечетким и с большими помехами, т.е. малоэффективным.
Разрешающее (1/4D)Разрешающее увеличение позволяет достичь предела разрешающей способности телескопа (т.е. возможности различать мелкие детали изучаемых объектов). С таким увеличением эффективно изучать планеты, спутники и Солнце. Использование увеличения выше разрешающего, как правило, не дает возможности увидеть больше деталей, однако при идеальных атмосферных условиях можно попробовать немного «поднять» увеличение выше расчетного значения.
Большое (1D)Большое увеличение эффективно при обзорном изучении поверхности Луны и Солнца, а также для наблюдения крупных деталей на планетных дисках.
Среднее (D/2)Среднее увеличение рекомендуется использовать для наблюдения протяженных туманностей и ярких галактик.
Выбрать окуляр в каталоге
Расчет оптической силы интраокулярных линз после рефракционной хирургии роговицы
Имплантация интраокулярных линз (ИОЛ) после рефракционной хирургии является сложной задачей, поскольку стандартные формулы силы ИОЛ могут привести к значительным непреднамеренным послеоперационным ошибкам рефракции. В этих случаях следует использовать специальные методы расчета ИОЛ.
Текущие стандартные формулы ИОЛ представляют собой теоретические формулы 3-го и 4-го поколения, такие как Hoffer Q, SRK / T, Holladay II, а также формулы Barrett Universal II и Hill RBF.Формулы используют силу роговицы двумя способами. Во-первых, мощность роговицы напрямую используется в расчете вергенции для прогнозирования послеоперационной рефракции. Во-вторых, сила роговицы используется для прогнозирования эффективного положения линзы (ELP), которое представляет собой глубину ИОЛ относительно роговицы. Рефракционная хирургия изменяет кривизну роговицы и вносит ошибку как в измерение силы роговицы, так и в прогноз ELP. Оба типа ошибок приводят к недооценке необходимой мощности ИОЛ в глазах, перенесших ранее миопическую рефракционную операцию, и к завышению необходимой мощности ИОЛ в глазах, перенесших ранее операцию по гиперметропической рефракции.
Лазерная коррекция зрения (LVC) и лучевая кератотомия (RK) влияют на мощность роговицы таким образом, что стандартная кератометрия недооценивает коррекцию рефракции, но по разным причинам, которые объясняются ниже. Стандартная кератометрия включает ручную кератометрию (например, кератометр Бауша и Ломба) и автоматизированную кератометрию (например, IOL-Master).
Ошибка кератометрии после лазерной коррекции зрения
Лазерная коррекция зрения включает в себя лазерный кератомилез in situ (LASIK), фоторефракционную кератэктомию (PRK), удаление лентикулярного изображения через небольшой разрез (SMILE) и лазерный субэпителиальный кератомилез (LASEK).Эти процедуры изменяют только переднюю кривизну роговицы, но оставляют заднюю кривизну неизменной, тем самым изменяя нормальное соотношение передней / задней кривизны (рис. 1). Поскольку стандартная кератометрия измеряет только переднюю кривизну роговицы, задняя кривизна экстраполируется на основе нормального отношения передней / задней кривизны. Эта экстраполяция больше не действует после LVC. Следовательно, одна из возможных стратегий определения кератометрии после LVC — это прямое измерение как передней, так и задней кривизны роговицы и, таким образом, расчет чистой мощности роговицы.
Ошибка кератометрии после радиальной кератотомии
Радиальная кератотомия (РК) сглаживает как переднюю, так и заднюю поверхности роговицы, но только в небольшой центральной оптической зоне (рис. 2). Эффективный диаметр оптической зоны может быть значительно меньше зоны измерения стандартной кератометрии. Поэтому стандартная кератометрия имеет тенденцию переоценивать истинную мощность роговицы. Эти роговицы часто имеют нерегулярный астигматизм из-за асимметричных разрезов. Кроме того, после операции по удалению катаракты может наблюдаться центральное уплощение из-за отека роговицы.Большая часть эффекта уплощения проходит в течение нескольких месяцев, но остаточный гиперметропический сдвиг может сохраняться годами. Таким образом, на глазах после РК истинная сила роговицы может быть оценена только с учетом небольшой эффективной оптической зоны и послеоперационного гиперметропического смещения.
Ошибка в вычислении эффективного положения линзы после рефракционной хирургии
Стандартные формулы силы ИОЛ используют осевую длину и силу роговицы для прогнозирования положения ИОЛ в послеоперационном периоде.Рефракционная хирургия изменяет силу роговицы, но не глубину линзы, что приводит к ошибке в прогнозировании ELP в стандартных формулах. После РК и миопической LVC мощность роговицы снижается, и оценки ELP становятся слишком низкими. Это приводит к недооценке необходимой мощности ИОЛ. Завышение силы ИОЛ происходит после гиперметропического поражения ЛЖ. Чтобы уменьшить эту ошибку, необходимо использовать специальные методы.
В этом разделе описаны различные методы оценки или измерения истинной силы роговицы после рефракционной хирургии.Читатель должен отметить, что некоторые методы подходят для глаз после LVC, некоторые для глаз после RK, а некоторые применимы к обеим ситуациям (Таблица 1). Эти оценки истинной мощности роговицы затем используются в качестве входных данных для формул ИОЛ, которые предназначены для хирургии катаракты после рефракционной хирургии.
Метод анамнеза
Этот метод был впервые представлен Holladay [1] в 1989 году. Сила роговицы рассчитывается путем вычитания изменения явной рефракции в плоскости роговицы, вызванного рефракционной хирургической процедурой, из значений силы роговицы, полученных до рефракционной операции.
K = KPRE-RCC
- K: расчетная сила роговицы
- KPRE: мощность роговицы до рефракционной хирургии
- ПКР: изменение явной рефракции в плоскости роговицы
Этот метод теоретически дает фактическую мощность роговицы и его легко вычислить при наличии соответствующих данных.
Проблемы с этим методом включают недоступность или неточность этих данных, а также интервальные изменения кривизны роговицы или оптической силы и четкости хрусталика (если послеоперационная рефракция недоступна).Кроме того, метод истории болезни не подходит для РК из-за нестабильной силы роговицы (после РК роговица обычно постепенно сглаживается в течение многих лет).
Контактные линзы, метод избыточного преломления
Метод контактных линз был впервые описан Ridley [2] в 1948 году. Сила роговицы рассчитывается как сумма базовой кривой контактной линзы, силы и избыточного преломления минус сферический эквивалент явной рефракции без контактной линзы. .
K = BCL + PCL + RCL-RNoCL
- BCL: кривая основания контактной линзы
- PCL: оптическая сила контактных линз
- RCL: избыточное преломление контактных линз
- RNoCL: сферический эквивалент явного рефракции без контактной линзы
Преимущество этого метода в том, что необходимое оборудование недорогое и легко доступно.Единственный дополнительный шаг — это надеть контактную линзу на глаз и повторить рефракцию. Этот метод подходит как для роговицы после LASIK, так и для РК.
Точность этого метода ухудшается с ухудшением остроты зрения с наилучшей коррекцией (BCVA). Поэтому он не подходит для случаев плотной катаракты.
Кератометрия с поправкой на топографию после LASIK
Эти формулы регрессии основаны на анализе центральных Ks (TK) топографии роговицы после LASIK в глазах LASIK.Истинная сила роговицы прогнозируется с использованием только одного центрального послеоперационного чтения TK. Они основаны на данных LASIK и не подходят для случаев после РК.
Формула Коха и Ванга
K = 1,1141 × TK -6,1 [3]
- K: расчетная мощность роговицы.
- TK: центральная топография роговицы после LASIK
Топографическая система, используемая в этой формуле, представляет собой систему TMS (версия программного обеспечения 1.6 1; Computed Anatomy Inc, Нью-Йорк, Нью-Йорк)
Формула Шаммаса
К = 1.14 × ТК -6,8 [4]
- K: расчетная сила роговицы.
- TK: центральная топография роговицы после LASIK
Метод топографии центрального кольца
Awwad et al. [5] сообщили, что преломляющая сила роговицы после РК лучше всего описывается усреднением топографической силы роговицы в центральной области 3,0 мм. Применение этого метода вместе с формулой двойной K ИОЛ позволило добиться превосходной предсказуемости силы ИОЛ.Этот метод может не подходить для случаев катаракты после LVC.
Измерение чистой силы роговицы
Основным решением для получения точной мощности роговицы после LVC является прямое измерение передней и задней кривизны роговицы и, таким образом, расчет чистой мощности роговицы. Несколько инструментов могут напрямую измерять как переднюю, так и заднюю поверхности роговицы. Эти методы включают томографию со щелевым сканированием, фотографию Шаймпфлюга и оптическую когерентную томографию.Они описаны ниже. Эти методы проходят тестирование при хирургии катаракты после LVC и могут не подходить для случаев после РК.
Орбскан
Система видеокератографии Orbscan II (Bausch & Lomb, США) сочетает в себе диск Пласидо и технологию щелевого сканирования для прямого измерения возвышения и кривизны как передней, так и задней поверхностей роговицы. [6] . Ограничение карт высоты Orbscan состоит в том, что интракорнеальные помутнения могут затруднять визуализацию задней части роговицы и вносить артефакты в расчеты общей мощности роговицы.Кроме того, достоверность задних измерений роговицы с помощью Orbscan полностью не установлена.
Pentacam
Pentacam (Oculus, Германия) — это вращающаяся система фотографирования Scheimpflug, которая может обеспечить топографический анализ передней и задней поверхностей роговицы, а также толщины роговицы в центре. Он генерирует карту TrueNetPower роговицы, а также вычисляет эквивалентный K, называемый отчетом Холладея. Эквивалент K (в рекомендуемой зоне 4,5 мм) послеоперационной роговицы был предложен в качестве точной меры истинной мощности роговицы. [7] Когда клинические исторические данные по рефракции недоступны, Pentacam предлагает альтернативный метод измерения центральной мощности роговицы.
Оптическая когерентная томография (ОКТ)
Оптическая когерентная томография (ОКТ) может использоваться для измерения мощности передней и задней части роговицы. Это особенно ценно, когда данные дооперационной рефракционной хирургии недоступны. Тан сообщил о хорошей воспроизводимости и точности при использовании ОКТ для измерения общей силы роговицы [8] и расчета мощности ИОЛ [9] [10] .
Следующие формулы силы ИОЛ и корректировки номограмм были разработаны или протестированы в случаях после рефракционной хирургии. Читатель должен отметить, предназначены ли они для использования стандартной кератометрии или истинной мощности роговицы (см. Выше) в качестве входных данных (Таблица 2). Читатель также должен отметить, что некоторые методы подходят для глаз после LVC, некоторые для глаз после RK, а некоторые применимы к обеим ситуациям (Таблица 2).
Формулы Double-K
В версии формулы ИОЛ «двойной К» показатель мощности роговицы после рефракционной хирургии используется в расчете вергенции, в то время как мощность роговицы до рефракционной хирургии (или ее оценка) используется в формуле прогнозирования ELP.Это уменьшает ошибку в расчете ELP после рефракционной хирургии. Доступны версии Double-K формул SRK / T [11] , Hoffer Q [12] и Holladay II. Формула double-K Holladay II допускает настройку как после RK, так и после LVC.
Формула Q Hoffer
Формула Hoffer Q оценивает метод расчета ELP, который менее чувствителен к изменению мощности роговицы. Следовательно, он вносит меньше ошибок в глаза после рефракционной хирургии, чем другие формулы однократного K [13] .Если формулы с двойным K недоступны, может быть полезна формула Hoffer-Q с одним K.
Формула Haigis-L
Эта формула является частью встроенного программного обеспечения IOLMaster. Сила роговицы рассчитывается путем ввода следующих биометрических данных IOL-Master: осевая длина (AL), глубина передней камеры (ACD) и кератометрия (радиусы роговицы). Эта формула представляет собой формулу регрессии, основанную на статистике. Точность может снизиться, если глаз находится на границе нормального распределения (глаза с высокой или высокой дальнозоркостью).Он основан на данных LASIK и подходит только для случаев после LVC, но не для случаев после RK.
Маска Формула
P = PTARG-0,326 × RCC -0,101
- PTARG: сила ИОЛ, рассчитанная по стандартным формулам для ИОЛ
- ПКР: изменение рефракции, вызванное хирургическим вмешательством
(SRK / T: миопы; Hoffer Q: гиперметропии)
Этот метод регулирует силу ИОЛ, рассчитанную с использованием данных послеоперационных измерений с использованием информации об изменении рефракции, вызванном хирургическим вмешательством.Они рекомендуют использовать формулу SRK / T для миопических AL и Hoffer Q для гиперметропических AL [14] .
Корректировка номограммы Коха и Ванга
Koch и Wang сделали отдельные номограммы как для миопической, так и для гиперметропической рефракционной хирургии. Эту номограмму легко использовать: достаточно найти осевую длину пациента и добавить или вычесть отрегулированную мощность ИОЛ к мощности ИОЛ, рассчитанной с использованием формул [3] SRK / T, Hoffer Q и Holladay 1.
Поскольку существует множество методов расчета силы ИОЛ после предыдущей рефракционной хирургии, хирург, специализирующийся на лечении катаракты, сталкивается с множеством вариантов.Полезно получить консенсус по нескольким методам, вычислив среднюю или медианную рекомендуемую мощность ИОЛ. Несколько калькуляторов ИОЛ (см. Раздел «Дополнительные ресурсы» ниже) предоставляют простой способ сделать это. Когда существует широкий спектр рекомендаций (как правило, в случаях рефракционной хирургии для высокой или экстремальной диоптрийной коррекции), разумно подстраховаться в направлении миопических результатов (выбрать более высокую мощность ИОЛ или выбрать более низкую оценку мощности роговицы для использования при расчете ИОЛ. ).
Даже при использовании многих специализированных методов предсказуемость рефракционного исхода хирургии катаракты после предыдущей рефракционной операции все еще не так хороша, как результат для девственных глаз.Поэтому пациентов, которые ранее перенесли рефракционную операцию, следует предупредить о потенциальной необходимости коррекции рефракции после операции по удалению катаракты.
- ↑ Холладей, Дж. Т., Консультации по рефракционной хирургии. Refract Corneal Surg, 1989. 5: с. 203.
- ↑ Ридли, Ф., Развитие теории контактных линз — формование, вычисление и вуалирование. Trans Ophthalmol Soc, 1948. 68: p. 385–401.
- ↑ 3,0 3,1 Кох, Д. и Л. Ван, Расчет силы ИОЛ в глазах, перенесших рефракционную операцию.J Cataract Refract Surg, 2003. 29: с. 2039 — 2042 гг.
- ↑ Шаммас, Х.Дж. и др., Корректировка измерений силы роговицы для расчета силы интраокулярной линзы после миопического лазерного кератомилеза in situ. Am J Ophthalmol, 2003. 136 (3): с. 426-32.
- ↑ Аввад, С.Т. и др., Расчет силы интраокулярной линзы после радиальной кератотомии: оценка силы преломления роговицы. J Cataract Refract Surg, 2007. 33 (6): с. 1045-50.
- ↑ Кази М.А. и др., Определение оптической силы роговицы с помощью видеокератографии Orbscan II для расчета интраокулярной линзы после эксимерлазерной хирургии миопии.J Cataract Refract Surg, 2007. 33 (1): с. 21-30.
- ↑ Холладей, J.T., W.E. Хилл и А. Стейнмюллер, Измерение мощности роговицы с использованием визуализации по шаймпфлагу в глазах с предшествующей операцией по рефракции роговицы. J Refract Surg, 2009. 25 (10): с. 862-8.
- ↑ Тан М. и др., Измерение общей мощности роговицы до и после лазерного кератомилеза in situ с помощью высокоскоростной оптической когерентной томографии. J Cataract Refract Surg, 2006. 32 (11): с. 1843-50.
- ↑ Тан, М., Формула для расчета силы интраокулярной линзы на основе оптической когерентной томографии: пилотное исследование.J Refract Surg, 2010. 26 (6): с. 430-437.
- ↑ Тан, М., Расчет силы интраокулярной линзы на основе оптической когерентной томографии в области Фурье. Вкладывать деньги. Офтальмол. Vis. Наук, 2010. 51: с. Электронный реферат 5692.
- ↑ Арамберри, Дж., Расчет силы интраокулярных линз после рефракционной хирургии роговицы: метод двойного К. J Cataract Refract Surg, 2003. 29 (11): с. 2063-8.
- ↑ Аввад, С.Т. и др., Оценка преломляющей силы роговицы и расчет интраокулярной линзы после гиперметропического LASIK.Офтальмология, 2009. 116 (3): с. 393-400 е1.
- ↑ Ван, Л., М.А. Бут, и Д.Д. Кох, Сравнение методов расчета силы интраокулярных линз в глазах, подвергшихся LASIK. Офтальмология, 2004. 111 (10): с. 1825-31.
- ↑ Маскет, С. и С.Е. Маскет, Простая формула регрессии для регулировки оптической силы интраокулярных линз в глазах, требующих хирургического вмешательства по удалению катаракты после фотоабляции эксимерного лазера. J Cataract Refract Surg, 2006. 32 (3): с. 430-4.
|
Калькулятор параметров системы визуализации | Эдмунд Оптикс
Дополнительные ссылки
Формат сенсора: Раскрывающееся меню формата сенсора позволяет быстро выбрать один из распространенных форматов сенсора камеры.Формат сенсора является фундаментальным параметром системы визуализации, и его можно найти в спецификациях любой камеры на веб-сайте Edmund Optics. Сохранение всех остальных параметров постоянными при увеличении или уменьшении формата сенсора камеры соответственно увеличит или уменьшит угол обзора. Важно помнить, что не каждый объектив для визуализации может охватывать все размеры сенсора. Максимальный формат сенсора часто указывается в технических характеристиках объектива, и его следует учитывать при выборе объектива и камеры.
См. ТакжеРазмеры сенсора: Физические размеры активной области сенсора. Это поле будет автоматически обновляться в зависимости от формата датчика, выбранного в раскрывающемся меню, но его можно дополнительно настроить на основе точных размеров датчика в вашей камере.
См. ТакжеРазмер пикселя: Размер пикселя сам по себе не контролирует FOV, видимый камерой, но имеет большое влияние на то, как в конечном итоге будет выглядеть изображение.Размер отдельных пикселей на датчике камеры, а также качество объектива и основное увеличение будут определять мельчайшие детали, которые можно увидеть на изображении. Размер пикселя должен быть указан в технических характеристиках камеры и обычно составляет от 2 до 10 мкм на пиксель. Ввод этого значения в калькулятор вернет разрешение пространства объекта, основанное на размере пикселя и рассчитанном основном увеличении (PMAG).
См. ТакжеРабочее расстояние (WD): Физическое расстояние между передней частью объектива формирования изображения и отображаемым объектом.Фокусное расстояние объектива и размер сенсора создают постоянное угловое поле зрения, а рабочее расстояние создает физическое поле зрения. Объективы с фиксированным фокусным расстоянием имеют диапазон рабочих расстояний, на которых они должны работать. Часто линзы для визуализации имеют минимальное рабочее расстояние (или иногда называемое минимальным расстоянием до объекта) и могут фокусироваться на этом расстоянии или на любом более длинном. Дистанционные кольца могут быть добавлены для уменьшения минимального рабочего расстояния в объективах с фиксированным фокусным расстоянием за счет сбора света и разрешения.Поскольку большинство объективов имеют незаметные фокусные расстояния, а поле зрения часто является фиксированным требованием, гибкость рабочего расстояния может быть полезной.
См. ТакжеПоле зрения (FOV): Видимая область проверяемого объекта. Это часть объекта, которая заполняет сенсор камеры. Необходимо ввести только горизонтальное поле зрения, так как вертикальное и диагональное будут вычисляться автоматически на основе соотношения сторон ранее введенного размера сенсора.
См. ТакжеТребуемое фокусное расстояние: Это позволит вычислить фокусное расстояние, необходимое для наблюдения введенного пользователем FOV на рабочем расстоянии пользователя. Это в первую очередь предназначено для использования с объективами с фиксированным фокусным расстоянием. Объектив с фиксированным фокусным расстоянием, также известный как объектив с фиксированным фокусным расстоянием, представляет собой объектив с фиксированным угловым полем обзора (AFOV). Увеличение или уменьшение рабочего расстояния изменит физическое поле зрения, но угловое всегда останется неизменным (если размер сенсора останется постоянным).Если рассчитанное фокусное расстояние кажется намного больше, чем у доступных объективов для визуализации, вам может потребоваться фиксированное увеличение или объектив с переменным фокусным расстоянием. Эти линзы часто позволяют достичь большего увеличения, чем линзы с фиксированным фокусным расстоянием, но имеют фиксированное рабочее расстояние и большую длину.
См. ТакжеУгловой FOV (H / V / D (°)): Необходимое полное угловое поле зрения будет вычислено и отображено здесь в градусах. Объективы для визуализации с одинаковым фокусным расстоянием иногда будут иметь немного разные угловые характеристики поля зрения, поэтому дважды проверьте, чтобы выбранный объектив мог захватывать нужный вам угол обзора.
См. ТакжеРазрешение пространства объекта (мкм): Минимальный размер элемента объекта, который может различить система формирования изображения, будет рассчитан с использованием размера пикселя и PMAG и отображается здесь в микронах. Это делается исходя из предположения, что для обнаружения этой особенности необходимы два пикселя и что выбранный объектив будет соответствовать разрешению в пространстве изображения датчика или превышать его. Этот раздел следует использовать только в качестве справки, а не как гарантию производительности.Если у вас есть вопросы, обратитесь к одному из наших инженеров.
См. ТакжеPMAG: Здесь будет отображаться основное увеличение, которое представляет собой отношение размера сенсора к физическому полю зрения. Также иногда называется оптическим увеличением, которое отличается от других распространенных увеличений, таких как визуальное (часто используется для луп и увеличительных линз) и системное увеличение (которое учитывает размер экрана или монитора и обычно намного больше).
См. Также Селектор линз| Basler
Шаг 1. Выберите серию и модель камеры.Серия камеры: Пожалуйста, выберите Basler aceBasler ace 2Basler aviatorBasler beatBasler boostBasler dartBasler MED aceBasler pulseBasler scout
Модель камеры: Пожалуйста, выберитеacA640-300gm, 1/4 «, PYTHON 300acA640-300gc, 1/4», PYTHON 300acA640-750uc, 1/4 «, PYTHON 300acA640-750um, 1/4», PYTHON 300acA640-90gc, 1/3 «, ICX424acA640-90uc, 1/3 «, ICX424acA640-90gc (CS-Mount), 1/3», ICX424acA640-90uc (CS-Mount), 1/3 «, ICX424acA640-120gc, 1/4», ICX618acA640-120uc, 1/4 «, ICX618acA640-120gc (CS-Mount), 1/4», ICX618acA640-120uc (CS-Mount), 1/4 «, ICX618acA640-90gm, 1/3″, ICX424acA640-90um, 1/3 » , ICX424acA640-90gm (CS-Mount), 1/3 «, ICX424acA640-121gm, 1/4», ICX618 ReplacementacA720-290gm, 1/2.9 дюймов, IMX287acA720-290gc, 1 / 2,9 дюйма, IMX287acA720-520uc, 1 / 2,9 дюйма, IMX287acA720-520um, 1 / 2,9 дюйма, IMX287acA780-75gc, 1/2 дюйма, ICX415acA780-75gc (крепление CS), 1 / 2 «, ICX415acA780-75gm, 1/2», ICX415acA800-200gc, 1 / 3.6 «, PYTHON 500acA800-200gm, 1 / 3.6», PYTHON 500acA800-510uc, 1 / 3.6 «, PYTHON 500acA800-510um, 1 / 3.6» , PYTHON 500acA1280-60gc, 1 / 1,8 дюйма, EV76C560acA1300-60gc, 1 / 1,8 дюйма, EV76C560acA1300-60gmNIR, 1 / 1,8 дюйма, EV76C661acA1300-60gmNIR (крепление CS), крепление 1 / 1,8 дюйма, EV76C661acA1300-60gc (CS-Mount ), 1 / 1,8 «, EV76C560acA1300-75gc, 1/2», PYTHON 1300acA1300-75gm, 1/2 «, PYTHON 1300acA1300-200uc, 1/2», PYTHON 1300acA1300-200um, 1/2 «, PYTHON 1300acA1280-60gm , 1/1.8 «, EV76C560acA1300-60gm, 1 / 1.8», EV76C560acA1300-60gm (CS-Mount), 1 / 1.8 «, EV76C560acA1300-22gc (CS-Mount), 1/3», ICX445acA1300-30gc, 1/3 «, ICX445acA1300 -30uc, 1/3 «, ICX445acA1300-30gc (CS-Mount), 1/3», ICX445acA1300-22gm (CS-Mount), 1/3 «, ICX445acA1300-30gm, 1/3», ICX445acA1300-30um, 1 / 3 дюйма, ICX445acA1300-30gm (CS-Mount), 1/3 дюйма, ICX445acA1440-73gm, 1 / 2,9 дюйма, IMX273acA1440-73gc, 1 / 2,9 дюйма, IMX273acA1440-220uc, 1 / 2,9 дюйма, IMX273acA1440-220um, 1 / 2,9 дюйма, IMX273acA1600-60gc, 1 / 1,8 дюйма, EV76C570acA1600-60gc (крепление CS), 1/1.8 дюймов, EV76C570acA1600-60gm, 1 / 1,8 дюйма, EV76C570acA1600-20gc, 1 / 1,8 дюйма, ICX274acA1600-20uc, 1 / 1,8 дюйма, ICX274acA1600-20gm, 1 / 1,8 дюйма, ICX274acA1600-20um, 1 / 1,8 дюйма, ICX274acA1600 20 г (крепление CS), 1 / 1,8 дюйма, ICX274acA1600-20um (крепление CS), 1 / 1,8 дюйма, ICX274acA1920-25gc, 1 / 3,7 дюйма, MT9P031acA1920-25gm, 1 / 3,7 дюйма, MT9P031acA1920-25gc (CS- Крепление), 1 / 3,7 дюйма, MT9P031acA1920-25uc, 1 / 3,7 дюйма, MT9P031acA1920-25um, 1 / 3,7 дюйма, MT9P031acA1920-40uc, 1 / 1,2 дюйма, IMX249acA1920-40um, 1 / 1,2 дюйма, IMX249acA1920-40gc, 1 / 1,2 дюйма, IMX249acA1920-40gm, 1 / 1,2 дюйма, IMX249acA1920-48gc, 2/3 дюйма, PYTHON 2000acA1920-48gm, 2/3 дюйма, PYTHON 2000acA1920-50gc, 1/1.2 «, IMX174acA1920-50gm, 1 / 1.2», IMX174acA1920-150uc, 2/3 «, PYTHON 2000acA1920-150um, 2/3», PYTHON 2000acA1920-155uc, 1 / 1.2 «, IMX174acA1920-155um, 1 / 1.2», IMX174acA2000-165uc, 2/3 дюйма, CMV2000acA2040-90uc, 1 дюйм, CMV4000acA2000-50gc, 2/3 дюйма, CMV2000acA2000-50gc (крепление CS), 2/3 дюйма, CMV2000acA2000-340kc, 2/3 дюйма, CMV2000acA20 25gc, 1 дюйм, CMV4000acA2040-180kc, 1 дюйм, CMV4000acA2000-50gm, 2/3 дюйма, CMV2000acA2000-50gmNIR, 2/3 дюйма, CMV2000 с усилением в ближней инфракрасной области , CMV2000 в ближнем ИК-диапазоне acA2000–340 км, 2/3 «, CMV2000acA2000-340 км в ближнем ИК-диапазоне, 2/3 дюйма, CMV2000 в ближнем ИК-диапазоне acA2040-35gc, 1/1.8 дюймов, IMX265acA2040-35gm, 1 / 1,8 дюйма, IMX265acA2040-55uc, 1 / 1,8 дюйма, IMX265acA2040-55um, 1 / 1,8 дюйма, IMX265acA2040-120uc, 1 / 1,8 дюйма, IMX252acA2040-120um, 1 / 1,8 дюйма, IMX-252acA20 25 г / м2, 1 дюйм, CMV4000acA2040-25gmNIR, 1 дюйм, CMV4000 с усилением в ближнем ИК-диапазоне acA2040-90um, 1 дюйм, CMV4000acA2040-90umNIR, 1 дюйм, CMV4000 с расширением в ближнем ИК-диапазонеacA2040-180 км, 1 дюйм, CMV4000acA2040-180 км с улучшенным ИК-диапазоном NIR4, 124 дюйма, с расширением в ближнем ИК-диапазоне -20gc, 2/3 дюйма, IMX264acA2440-20gm, 2/3 дюйма, IMX264acA2440-35uc, 2/3 дюйма, IMX264acA2440-35um, 2/3 дюйма, IMX264acA2440-75uc, 2/3 дюйма, IMX250acA2440-75um, 2 / 3 дюйма, IMX250acA2500-14gc, 1/2.5 дюймов, MT9P031acA2500-14uc, 1 / 2,5 дюйма, MT9P031acA2500-14gc (крепление CS), 1 / 2,5 дюйма, MT9P031acA2500-14uc (крепление CS), 1 / 2,5 дюйма, MT9P031acA2500-20gc, 1 дюйм, PYTHON 5000acA2500- 20 г, 1 дюйм, PYTHON 5000acA2500-60uc, 1 дюйм, PYTHON 5000acA2500-60um, 1 дюйм, PYTHON 5000acA2500-14gm, 1 / 2,5 дюйма, MT9P031acA2500-14um, 1 / 2,5 дюйма, MT9P031acA2500-14gm (крепление CS), 1 /2,5 дюйма, MT9P031acA2500-14um (крепление CS), 1 / 2,5 дюйма, MT9P031acA3088-16gm, 1 / 1,8 дюйма, IMX178acA3088-16gc, 1 / 1,8 дюйма, IMX178acA3088-57um, 1 / 1,8 дюйма, IMX178acA3088-57uc, 1 /1,8 дюйма, IMX178acA3800-10gc, 1/2.3 «, MT9J003acA3800-10gm, 1 / 2.3», MT9J003acA3800-14uc, 1 / 2.3 «, MT9J003acA3800-14um, 1 / 2.3», MT9J003acA4024-8gm, 1 / 1.7 «, IMX226acA4024-8gc, 1 / 1.7», IMX24-226acA 29um, 1 / 1.7 «, IMX226acA4024-29uc, 1 / 1.7», IMX226acA4096-11gm, 1 «, IMX267acA4096-11gc, 1», IMX267acA4096-30um, 1 «, IMX267acA4096-30uc, 1″, IMX267acA4096-40um, 1 » , IMX255acA4096-40uc, 1 «, IMX255acA4112-8gm, 1.1», IMX304acA4112-8gc, 1.1 «, IMX304acA4112-20um, 1.1», IMX304acA4112-20uc, 1.1 «, IMX304acA4112-30um, 1.1», IMX253acA4112-30 IMX253acA4600-7gc, 1/2.3 «, MT9F002acA4600-10uc, 1 / 2.3», MT9F002acA5472-5gm, 1 «, IMX183acA5472-5gc, 1», IMX183acA5472-17um, 1 «, IMX183acA5472-17uc, 1», IMX183a2A1920-51gma -51gcBAS, 1 / 2.3 «, IMX392a2A1920-51gcPRO, 1 / 2.3», IMX392a2A1920-51gmPRO, 1 / 2.3 «, IMX392a2A1920-160umBAS, 1 / 2.3», IMX392a2A1920-160ucBAS, 1 / 2.32ucBAS, 1 / 2.32ucBAS, 1 / 2.32ucBAS, 1 / 2.32acBAS, 1 / 2.32ucBAS, 1 / 2.32ac 2,3 дюйма, IMX392a2A1920-160umPRO, 1 / 2,3 дюйма, IMX392a2A2590-22gmBAS, 1 / 2,8 дюйма, IMX334ROIa2A2590-22gcBAS, 1 / 2,8 дюйма, IMX334ROIa2A2590-22gmPRO, 1 / 2,8 дюйма, IMX32590ROIa.8 «, IMX334ROIa2A2590-60umBAS, 1 / 2,8», IMX334ROIa2A2590-60ucBAS, 1 / 2,8 «, IMX334ROIa2A2590-60umPRO, 1 / 2,8», IMX334ROIa2A2590-60ucPRO, 1 / 2,8 «, IMX334X340-32A2A 13gcBAS, 1 / 1,8 дюйма, IMX334a2A3840-13gmPRO, 1 / 1,8 дюйма, IMX334a2A3840-13gcPRO, 1 / 1,8 дюйма, IMX334a2A3840-45umBAS, 1 / 1,8 дюйма, IMX334a2A3840-45ucBAS, 1 / 1,8 дюйма, IMX40-34a «, IMX334a2A3840-45ucPRO, 1 / 1.8», IMX334a2A4504-5gmBAS, 1.1 «, IMX541a2A4504-5gcBAS, 1.1», IMX541a2A4504-5gmPRO, 1.1 «, IMX541a2A4504-5gcPRO, 1.1.1 «, IMX541a2A4504-18ucBAS, 1.1», IMX541a2A4504-18umPRO, 1.1 «, IMX541a2A4504-18ucPRO, 1.1», IMX541a2A5320-7gmBAS, 1.1 «, IMX542a2A5320-7gcBAS, 1.1gA2, IMX542a2A5320-7gcBAS, 1.1gA2, IMPO3, IMX5205-7gcBAS, 1.1gA3, IMPO3, IMX5205, IMPO3 «, IMX542a2A5320-23umBAS, 1.1», IMX542a2A5320-23ucBAS, 1.1 «, IMX542a2A5320-23umPRO, 1.1», IMX542a2A5320-23ucPRO, 1.1 «, IMX542a2A5328-4gmBAS, 1.2-4ag», IMX542a2A5328-4gmBAS, 1.2-4ag «, IMX5325X328-4gmBAS, 1.2-4ac, IMX325X328-4gmBAS, 1.2-4ag, IMX325X328-4gmBAS, 1.2-4ac, IM5X325X328-4gmBAS, 1.24ac, IM5X328-4gmBAS, 1.2-4ac, IMX325X328-4gmBAS, 1.24a2», IMX325X328-4gmBAS, 1.24ag , IMX540a2A5328-4gcPRO, 1,2 «, IMX540a2A5328-15umBAS, 1,2», IMX540a2A5328-15ucBAS, 1,2 «, IMX540a2A5328-15umPRO, 1.2 «, IMX540a2A5328-15ucPRO, 1,2», IMX540avA1000-100gc, 1/2 «, KAI-1050avA1000-120kc, 1/2», KAI-1050avA1600-50gc, 2/3 «, KAI-2050avA1600-65kc, 2/3 «, KAI-2050avA2300-25gc, 1», KAI-4050avA2300-30kc, 1 «, KAI-4050beA4000-62kc, 1,75 дюйма, CMV12000beA4000-62 км, 1,75 дюйма, CMV12000boA4096-93cc, 1 дюйм, IMX255boA4096-93cm IMX255boA4112-68 см, 1,1 дюйма, IMX253boA4112-68 см, 1,1 дюйма, IMX253boA4500-45 см, 1,3 дюйма, XGS 20000boA4500-45 см, 1,3 дюйма, XGS 20000boA6500-36 см, APS-C «, XGS 32000boA6500-36 см, XGPS-C, AGPS-C 32000boA8100-16см, 35 мм, XGS 45000boA8100-16cc, 35 мм, XGS 45000daA1280-54lc (S-Mount), 1/3 «, AR0134daA1280-54lm (S-Mount), 1/3», AR0134daA1280-54uc ( Без крепления), 1/3 «, AR0134daA1280-54um (без крепления), 1/3», AR0134daA1280-54um (S-Mount), 1/3 «, AR0134daA1280-54um (CS-Mount), 1/3 «, AR0134daA1280-54uc (CS-Mount), 1/3», AR0134daA1280-54uc (S-Mount), 1/3 «, AR0134daA1280-54lm (No-Mount), 1/3», AR0134daA1280-54lm (CS- Крепление), 1/3 дюйма, AR0134daA1280-54lc (без крепления), 1/3 дюйма, AR0134daA1280-54lc (крепление CS), 1/3 дюйма, AR0134daA1600-60uc (N o-Mount), 1/1.8 дюймов, EV76C570daA1600-60um (крепление CS), 1 / 1,8 дюйма, EV76C570daA1600-60lc (крепление S), 1 / 1,8 дюйма, EV76C570daA1600-60 мкм (крепление S), 1 / 1,8 дюйма, EV76C570daA1600-60um (№ -Mount), 1 / 1,8 «, EV76C570daA1600-60um (S-Mount), 1 / 1.8», EV76C570daA1600-60uc (CS-Mount), 1 / 1,8 «, EV76C570daA1600-60uc (S-Mount), 1 / 1,8» , EV76C570daA1600-60lm (без крепления), 1 / 1,8 дюйма, EV76C570daA1600-60lm (с креплением CS), 1 / 1,8 дюйма, EV76C570daA1600-60lc (без крепления), 1 / 1,8 дюйма, EV76C570daA1600-60lc (крепление CS ), 1 / 1,8 дюйма, EV76C570daA1920-15um (без крепления), 1 / 3,7 дюйма, MT9P031daA1920-30uc (с креплением S), 1/3.7 дюймов, MT9P031daA1920-30um (крепление S), 1 / 3,7 дюйма, MT9P031daA1920-30um (без крепления), 1 / 3,7 дюйма, MT9P031daA1920-30um (крепление CS), 1 / 3,7 дюйма, MT9P031daA1920-30uc (без крепления) -Mount), 1 / 3,7 дюйма, MT9P031daA1920-30uc (крепление CS), 1 / 3,7 дюйма, MT9P031daA1920-160uc (крепление S), 1 / 2,3 дюйма, IMX392daA1920-160uc (крепление CS), 1 / 2,3 дюйма , IMX392daA1920-160uc (без крепления), 1 / 2,3 дюйма, IMX392daA1920-160um (с креплением S), 1 / 2,3 дюйма, IMX392daA1920-160um (крепление CS), 1 / 2,3 дюйма, IMX392daA1920-160um (без крепления ), 1 / 2,3 дюйма, IMX392daA2500-60mc (S-крепление), 1 / 2,5 дюйма, AR0521daA2500-60mc (без крепления), 1/2.5 дюймов, AR0521daA2500-60mci (без крепления), 1 / 2,5 дюйма, AR0521daA2500-60mci (с креплением S), 1 / 2,5 дюйма, AR0521daA2500-14lc (с креплением на S), 1 / 2,5 дюйма, MT9P031daA2500-14lm (S — Крепление), 1 / 2,5 дюйма, MT9P031daA2500-14uc (S-крепление), 1 / 2,5 дюйма, MT9P031daA2500-14um (S-крепление), 1 / 2,5 дюйма, MT9P031daA2500-14um (без крепления), 1 / 2,5 дюйма , MT9P031daA2500-14um (CS-Mount), 1 / 2.5 «, MT9P031daA2500-14uc (No-Mount), 1 / 2.5», MT9P031daA2500-14uc (CS-Mount), 1 / 2.5 «, MT9P031daA2500-14lm (No-Mount) ), 1 / 2,5 дюйма, MT9P031daA2500-14lm (крепление CS), 1 / 2,5 дюйма, MT9P031daA2500-14lc (без крепления), 1/2.5 дюймов, MT9P031daA2500-14lc (крепление CS), 1 / 2,5 дюйма, MT9P031daA3840-30mc (крепление S), 1 / 1,8 дюйма, daA3840-30mc (без крепления), 1 / 1,8 дюйма, daA3840-45uc (S — Крепление), 1 / 1,8 «, IMX334daA3840-45uc (крепление CS), 1 / 1,8 дюйма, IMX334daA3840-45uc (без крепления), 1 / 1,8 дюйма, IMX334daA3840-45um (без крепления), 1 / 1,8 дюйма , IMX334daA3840-45um (S-Mount), 1 / 1.8 «, IMX334daA3840-45um (CS-Mount), 1 / 1.8», IMX334daA4200-30mci (без крепления), 1/3 «, AR1335daA4200-30mci (S-Mount) ), 1/3 «, AR1335Basler MED ace 2.3 MP 41 цвет, 1 / 1.2», IMX249Basler MED ace 2.3 MP 41 моно, 1/1.2 «, IMX249Basler MED ace 2.3 MP 164 цвета, 1 / 1.2», IMX174Basler MED ace 2.3 MP 164 моно, 1 / 1.2 «, IMX174Basler MED ace 5.1 MP 35 цветов, 2/3», IMX264Basler MED ace 5.1 MP 35 моно, 2/3 дюйма, IMX264Basler MED ace 5.1 MP 75 цветов, 2/3 дюйма, IMX250Basler MED ace 5.1 MP 75 моно, 2/3 дюйма, IMX250Basler MED ace 5,3 MP 20 моно, 1 дюйм, PYTHON 5000Basler MED ace 5,3 MP 20 цветов , 1 «, PYTHON 5000Basler MED ace 6.4 MP 59 моно, 1 / 1.8», IMX178Basler MED ace 6.4 MP 59 цвет, 1 / 1.8 «, IMX178Basler MED ace 8.9 MP 32 цвета, 1», IMX267Basler MED ace 8.9 MP 32 моно, 1 дюйм, IMX267Basler MED ace 8.9 MP 42 цвета, 1 дюйм, IMX255Basler MED ace 8.9 MP 42 моно, 1 дюйм, IMX255Basler MED ace 12.3 MP 23 цвета, 1,1 дюйма, IMX304Basler MED ace 12,3 MP 23 моно, 1,1 «, IMX304Basler MED ace 12.3 MP 30 цвет, 1.1», IMX253Basler MED ace 12.3 MP 30 моно, 1,1 «, IMX253Basler MED ace 20.0 MP 17 моно, 1», IMX183Basler MED ace 20.0 MP 17 цвет, 1 «, IMX183puA1280-54uc, 1/3 «, AR0134puA1280-54um, 1/3», AR0134puA1600-60uc, 1 / 1.8 «, EV76C570puA1600-60um, 1 / 1.8», EV76C570puA1920-30uc, 1 / 3.7 «, MT9P031puA1920-30um, 1/3.7 дюймов, MT9P031puA2500-14uc, 1 / 2,5 дюйма, MT9P031puA2500-14um, 1 / 2,5 дюйма, MT9P031scA640-70gc, 1/3 дюйма, ICX424scA640-70gm, 1/3 дюйма, ICX424scA750-60gc, 1/3 дюйма, MT750-022sc 60 г, 1/3 «, MT9V022scA1300-32gc, 1/3», ICX445scA1300-32gm, 1/3 «, ICX445scA1400-17gm, 2/3», ICX285scA1400-30gm, 2/3 «, ICX285scA1600-14gc, 1 / 1,8 «, ICX274scA1600-28gc, 1 / 1.8», ICX274scA1600-14gm, 1 / 1.8 «, ICX274scA1600-28gm, 1 / 1.8», ICX274
Расчет разрешения сенсора камеры и фокусного расстояния объектива
Обычно объективы имеют фиксированное фокусное расстояние.Кроме того, обычно рабочее расстояние является гибким, поэтому для простых вычислений начните с отношения рабочего расстояния к фокусному расстоянию. Это позволит вам использовать определенные фокусные расстояния объектива для определения необходимого рабочего расстояния. Если рабочее расстояние ограничено, то, инвертируя это соотношение, мы получаем отношение фокусного расстояния к рабочему расстоянию. Это позволит вам использовать ряд вариантов рабочего расстояния, чтобы получить диапазон фокусных расстояний. Затем, когда линза выбрана, вы можете пересчитать точное необходимое рабочее расстояние.
Эти расчеты основаны на следующем уравнении:
Вычислить фокусное расстояние:
- Пример 4 (Использование гибкого рабочего расстояния): мой FOV составляет 508 мм x 381 мм, размер моего сенсора — 8,47 мм (диагональ). Отношение рабочего расстояния к фокусному расстоянию составляет 381 мм / 8,47 мм = 45: 1. Итак, если я выберу фокусное расстояние 25 мм (что составляет около 1 дюйма), тогда потребуется рабочее расстояние около 1140 мм (45 дюймов). Если максимальное доступное рабочее расстояние составляет 889 мм (35 дюймов), то инвертирование соотношения (1:45) дает максимальное фокусное расстояние 35/45 = 19.76 мм (7/9 «), поэтому подойдет фокусное расстояние 16 мм. Обратный расчет дает необходимое рабочее расстояние около 711,2 мм (28»).
- Пример 5 (Использование фиксированного рабочего расстояния): мое поле обзора составляет 609,6 мм x 609,6 мм, формат моего датчика — 12,7 мм (диагональ), а мое рабочее расстояние — 1016 мм. Чтобы точно определить фокусное расстояние, вам необходимо знать соотношение сторон сенсора. Если точное значение не требуется, подойдет диагональ. Решение приведенного выше уравнения для фокусного расстояния будет (12.7X1016) / 609,6 = 21,2 мм. Это не обычное фокусное расстояние объектива, поэтому потребуется либо рабочее расстояние, либо нестандартный объектив, который позволяет пользователю изменять фокусное расстояние.
Объективы производятся с ограниченным количеством стандартных фокусных расстояний. Стандартные фокусные расстояния линз включают 6 мм, 8 мм, 12,5 мм, 25 мм и 50 мм. После того, как вы выберете объектив, фокусное расстояние которого наиболее близко к фокусному расстоянию, требуемому вашей системой визуализации, вам необходимо отрегулировать рабочее расстояние, чтобы сфокусировать проверяемый объект.
Примечание: Объективы с коротким фокусным расстоянием (менее 12 мм) создают изображения со значительным искажением. Если ваше приложение чувствительно к искажению изображения, попробуйте увеличить рабочее расстояние и используйте объектив с большим фокусным расстоянием. Если вы не можете изменить рабочее расстояние, вы несколько ограничены в выборе объектива.
Для вашей камеры Basler используйте инструмент Basler Lens Selector.
Как быстро определить рецепт на контактные линзы
Во время вращения контактных линз я научился ловкому трюку, позволяющему быстро оценить рецепт контактных линз, требующий вертексирования. Этот метод отлично работает в клинических / практических условиях, когда у вас нет калькулятора и вам нужно быстро определить рецепт на контактные линзы, исходя из рецепта пациента на очки. Ой, чуть не забыл, формулу вершин запоминать не нужно. Вот она…
Прежде всего, взгляните на приведенную ниже простую диаграмму. Поскольку мы уже знаем, что сила линзы 4,00 D или больше требует вершин на каждом меридиане, поэтому мы начинаем с 4,00 D = добавляем вершинный фактор +0.25 D. Для каждого изменения мощности 2 D вам потребуется изменение вершинного фактора на +0,25 D.
Сила линзы Вертекс-фактор (VF)
4,00 D +0,25 D
6,00 D +0,50 D
8,00 D +0,75 D
10,00 D +1,00 D
12,00 D +1,25 D
14,00 D +1,50 D
16,00 D +1,75 D
Пример № 1:
OD: -10,00 — 5,00 x 180
OS: +5,00 — 1,00 x 180
Дано: Rx для очков OD: -10,00 — 5,00 x 180. Что такое Rx для контактных линз?
1) Сила сферы = -10.00 D -> -10.00 + вершинный фактор +1.00 D = -9.00 D на 180-м меридиане
2) Сфера + сила цилиндра = -10,00 — 5,00 = -15,00 D -> -15,00 + VF +1,50 = -13,50 D на 90-м меридиане
3) Отрегулированная мощность цилиндра = -5,00 D + VF +1,50 = -3,50 D
4) Расчетный Rx = -9,00 — 3,50 x 180 (необходимо добавить -0,25 к мощности цилиндра для получения окончательного Rx)
5) Окончательный Rx = -9,00 — 3,75 x 180
Дано: Приемник для очков для ОС: +5.00 — 1.00 x 180. Что такое приём контактных линз?
1) Сила сферы = +5.00 D -> +5,00 + вершинный фактор +0,25 D = +5,25 D на 180-м меридиане
2) Сфера + сила цилиндра = +5,00 — 1,00 = +4,00 D -> +4,00 + VF +0,25 = +4,25 D на 90-м меридиане
3) Отрегулированная мощность цилиндра = -1,00 D + VF +0,25 = -0,75 D
4) Расчетный Rx = +5,25 — 0,75 x 180 (необходимо добавить -0,25 к мощности цилиндра для получения окончательного Rx)
5) Окончательный Rx = +5,25 — 1,00 x 180
Полезные примечания:
a) Плоскость очка -> Плоскость контактных линз
(помните: «CAP» = Closer ADD Plus !!!)
b) Минус Rx для очков -> Rx для контактных линз (CLRx) = ожидаем, что Rx для контактных линз будет МЕНЬШЕ минусового.
Пример: SRx = -4,50 D -> CL Rx = -4,25 D
c) Плюс очки Rx -> контактные линзы Rx = ожидайте, что контактные линзы Rx будут БОЛЬШЕ плюс.
Пример: SRx = +5,00 D -> CLRx = +5,25 D
Калькулятор фокусного расстояния объектива
Калькулятор фокусного расстояния объективаВведение
При фотосъемке или видеосъемке фотоаппаратом, объективом (или системой линзы) используется для проецирования изображения сцены, которую мы хотим записать на свет на чувствительной пленке или на цифровом датчике (называемом тепловизором).Тепловизоры бывают разных размеров, но обычно довольно маленькие (от нескольких от миллиметров до нескольких сантиметров), но сцена, которую мы хотим снять, может быть любого размера: менее одного миллиметра в случае макросъемки фотографии до тысяч километров при воспроизведении, например, Луна. Расстояние до сцены также может варьироваться от нескольких миллиметров до бесконечности. (или очень-очень далеко). Вопрос в том, как выбрать наиболее подходящий объектив по фокусному расстоянию. чтобы соответствовать конкретной потребности.
Эта линза лупы проецирует изображение вида за пределы
окно на экране (щелкните для увеличения).
Определение проблемы
Линза — это интерфейс между пространством объекта (сцена, реальный мир мы хотим записать) и пространство изображения (проекция излучаемого света по месту происшествия). На рисунке ниже объектное пространство находится слева от линзы, а пространство изображения находится справа.
Объект, объектив и изображение с расстояниями, размерами и плоскостями.Свет идет слева (объект) направо (изображение).
Даже если он не нарисован явно, между этими двумя пространствами свет только разрешено проходить через линзу; свет не может идти прямо от объекта пространство в пространство изображения. Физически это достигается за счет помещения тепловизора и объектива в герметичный коробку, оставляя только небольшое отверстие, пропускающее свет через намеченный дорожка. Этот корпус отсутствует на изображении с лупой выше (или объектив камеры ниже), и получившееся изображение имеет низкую контрастность и выглядит сероватый.
Предположим, мы хотим получить изображение объекта, представленного здесь красная жирная вертикальная стрелка. Стрелки используются для обозначения объектов и их изображений, потому что это немедленно очистить, если изображения вертикальные или перевернутые. Объект расположен на расстоянии x o от объектива и имеет высоту y o (суффиксы «o» обозначают объектное пространство). Изображение формируется на плоскости пленки (тепловизора) на расстоянии x i и имеет высоту y i ( «i» суффиксы обозначают пространство изображения).
Здесь для наглядности объект представлен лежащим на оптическом ось и занимая только половину возможного пространства; на самом деле объект обычно центрируется на оптической оси и занимает все пространство (и может также быть в любом месте выше, ниже или поперек оптической оси). При использовании здесь приближений первого порядка ничего не меняет пропорции, если объект центрирован или нет, и применяются те же формулы: x o — это размер объекта, а x i — размер объекта. размер его изображения вне зависимости от вертикального положения относительно оптического ось.
Расстояния x o и x i измеряются от передняя и задняя главные плоскости объектива соответственно. Если бы у нас была только одна тонкая линза (то есть они тонкие по сравнению с их фокусное расстояние и радиусы кривизны их поверхностей), мы могли измерить x o и x i от самого объектива, но поскольку линзы камеры представляют собой сложные оптические системы, состоящие из нескольких линз. упакованы вместе в тубу, даже если вся система ведет себя как единая линзу, обычно не представляется возможным рассматривать ее как единую «тонкую линза »; линза имеет толщину, которой нельзя пренебречь.У толстой линзы есть две основные плоскости: лучи входят в толстую линзу, как если бы Линза была тонкой и располагалась на переднем торце главной плоскости, выходила из нее, как если бы Линза была тонкой и располагалась в задней главной плоскости. Сложность в том, что эти два самолета не обязательно совпадают, они могут находиться в любом месте внутри или снаружи объектива, и передняя плоскость также может быть позади задний самолет. Если объект находится далеко, это не проблема, но при выполнении макроса фотографии трудно понять, откуда следует измерять расстояния.
Положение этих плоскостей почти никогда не определяется объективом. производителя и их позицию сложно угадать. Если вы используете коммерческую камеру с совместимым объективом, расстояние x i уже настроен, чтобы обеспечить идеальную фокусировку, и вы не беспокойтесь (задняя главная точка всегда одно фокусное расстояние впереди плоскости пленки, когда объектив сфокусирован на бесконечность). Вы также должны учитывать, что обычные фотообъективы состоят из нескольких группа линз, которые перемещаются относительно друг друга для фокусировки (или масштабирования) и это также может изменить положение главных плоскостей.
Положение передней главной плоскости нельзя игнорировать при выполнении макросъемка. Чтобы определить его местонахождение, достаточно сфотографировать объективом, определить увеличение (соотношение размеров изображения и объекта), вычислить x o и x i и измерьте их обратно от объект и изображение соответственно, чтобы увидеть, где расположены плоскости.
Этот фотообъектив для зеркальной фотокамеры проецирует изображение за пределы
окно на экране (щелкните для увеличения).
Бесконечность — это очень большое расстояние, и теоретически световые лучи исходят от объекты на бесконечности параллельны друг другу, но на практике вы не нужно зайти так далеко. Расстояние x o , которое намного больше фокусного расстояния f достаточно близко к бесконечности.
Геометрическая оптика: изображение одиночной линзы
У нас есть объект, излучающий (отражающий) свет, и линза, формирующая изображение. этого объекта на расстоянии за линзой.Чтобы вычислить размер и положение этого изображения, два уравнения являются обязательными. В этих уравнениях используется фокусное расстояние объектива f , которое составляет характеристика линзы и обычно выражается в миллиметрах. Первое уравнение определяет условие фокуса и устанавливает соотношение между расстоянием до объекта x o , расстоянием до изображения x i и фокусное расстояние f .
Здесь размеры — это просто расстояния, а не координаты: все они положительны. и выложен, как показано на диаграмме выше.Некоторые формулы в учебниках используют знак минуса для перевернутых изображений или пространство изображения; здесь дело обстоит не так.
Второе полезное уравнение устанавливает связь между увеличением, объектом или расстояние изображения, и фокусное расстояние. Увеличение — это по определению соотношение между размером изображения y i и размер объекта y o . Из-за похожих треугольников M также является соотношением между изображениями расстояние x i и расстояние до объекта x o (два детали с f уже являются комбинациями предыдущих уравнений).
С помощью этих двух уравнений можно определить все параметры простая (геометрическая) оптическая система, состоящая из одной линзы. За исключением проблемы главных плоскостей, объясненной ранее, это также допустимо, если линза представляет собой сложную систему, состоящую из множества линз, ведущих себя как один объектив, как в случае с фотообъективами.
С помощью тригонометрии также можно рассчитать угол обзора. ω , которое является функцией фокусного расстояния f , увеличение M и размер тепловизора, представленные здесь как y i , это следует интерпретировать как самое большое изображение, которое поместится в тепловизор.
Калькулятор фокусного расстояния
Следующий калькулятор выполнит вычисления за вас, просто введите размер объекта. y o , размер изображения y i , расстояние до объекта x o и нажмите кнопку «вычислить»; калькулятор вычислит недостающие значения.
Если вы используете объектив камеры, вам не следует слишком заботиться о x i : объектив уже предназначен для формирования изображения на правильное расстояние, соответствующее креплению камеры.
На самом деле x i il всегда очень близко к f . Когда объектив сфокусирован на бесконечность ( x o = ∞), x i и f равны. В обычных условиях фотографии x i просто немного больше чем f . По мере того, как расстояние до объекта x o становится меньше, расстояние до изображения x i увеличивается. Фокусировка объектива достигается регулировкой x i .В макросъемке, где x o очень маленькие, x i может быть довольно большим и для получения четкого изображения может потребоваться увеличить расстояние между объективом и тепловизором, например, с удлинительной трубкой. Это заставит немакрообъектив работать на близком расстоянии, но качество изображение может (будет) ухудшиться. Тем не менее, попробовать стоит.
Обратите внимание, что обычно формирователи изображений или пленки имеют прямоугольную форму, а это означает, что если вы используете калькулятор для определения поля зрения, вы получите три разные значения, если вы рассчитываете высоту, ширину или диагональ.
Стандартные размеры тепловизора
В таблице ниже указаны размеры наиболее распространенных тепловизоров и пленок. Эти значения полезны при определении максимального размера объекта. y i для данного тепловизора.
| Размер тепловизора | Высота [мм] |
Ширина [мм] |
Диагональ [мм] |
| 24 × 36 мм 2 | 24.0 | 36,0 | 43,3 |
| APS-C | 14,8 | 22,2 | 26,7 |
| 1 « | 9,6 | 12,8 | 16,0 |
| 2/3 « | 6,6 | 8,8 | 11,0 |
| 1/2 « | 4,8 | 6,4 | 8,0 |
| 1/3 дюйма | 3.6 | 4,8 | 6,0 |
| 1/4 дюйма | 2,7 | 3,6 | 4,5 |
Если вам интересно, что означает размер тепловизора в дюймах и как он связан на его физическую поверхность, это происходит от старых трубок видеокамеры (вакуумных) и описывает их внешний диаметр. Диагональ составляет примерно две трети внешнего диаметра. Трубки камеры исчезли в 1990-х годах, и их заменили ПЗС-сенсоры, но старые номинал стандартного размера все еще используется.
Заключение
Основные понятия геометрической оптики (первого порядка) применительно к фотографической линзы были ненадолго экспонированы. По этой причине, к сожалению, физические концепции, лежащие в основе этих явлений, были значительно упрощен; для получения более подробной информации я настоятельно рекомендую обратиться к книгам сообщается в разделе библиографии. Тем не менее, я надеюсь, что простой калькулятор поможет выбрать наиболее подходящие линзы для любых условий.
Библиография и дополнительная литература
| [1] | Уоррен Дж.Смит. Современная оптическая инженерия — Дизайн оптических систем. 3 rd Edition, McGraw-Hill, 2000 г., раздел 2.3. |
| [2] | Юджин Хехт. Расчет объектива: Калькуляторы
|