Урок 33. Инструмент Curves (Кривые)._
Вы узнаете:
- Как определить на каком участке кривой находятся важные детали.
- Как изменить масштаб фоновой сетки.
- Как вызвать окно инструмента Кривые и корректирующий слой Кривые.
- Как добавлять, удалять и перемещать точки на графике.
- Когда имеет смысл нажать кнопку авто и как настраивать кривые поканально.
- Как создать изображение в высоком и низком ключе.
- Как улучшить тусклую фотографию в режиме Lab.
- Как выполнить цветокоррекцию по числам.
Урок состоит из следующих разделов:
1. Обучающее видео.
2. Инструменты коррекции.
3. Нахождение наиболее важного участка кривой.
4. Единицы измерения окна Curves (Кривые).
5. Пипетки.
6. Значения кнопок.
7. Параметры автоматической коррекции.
8. Сетка.
9. Работа в окне Curves (Кривые).
10. Работа с каналами.
11. Высокий ключ.
12. Низкий ключ.
13. Цветокоррекция в режиме LAB.
14. Цветокоррекция по числам (теория).
15. Тандем палитры Info (Инфо) и инструмента пипетка.
16. Цветокоррекция по чилам (практика).
17. Таблица памятных цветов.
18. Советы.
19. Горячие клавиши.
20. Вопросы.
21. Домашнее задание.
Инструменты коррекции.
В предыдущих уроках были рассмотрены такие инструменты коррекции, как Levels (Уровни), Color Balance (Цветовой баланс), Hue/saturation (Цветовой тон/насыщенность). Все они отлично справляются со своими обязанностями. Однако есть инструмент, который может один заменить их все вместе взятые. Настало время познакомиться с более мощным инструментом цветокоррекции Curves (кривые). В нем можно выполнять как простые операции в одно движение мышкой, так и сложные шаги, требующие определенных навыков владения данным инструментом. Начнем от простого к сложному. Со временем вы уже не сможете без него обходиться, т.к. результат, полученный с помощью Кривых намного лучше результата, созданного предыдущими инструментами цветокоррекции.
Вызов диалогового окна происходит через меню Image (Изображение) – Adjustments (Коррекция) – Curves (Кривые). Комбинация клавиш Ctrl+M.
Нахождение наиболее важного участка кривой
Для начала нужно определить на каком участке кривой находятся важные детали изображения.В разных версиях программы это делается по-разному. В CS4 и CS5 нужно нажать миниатюру руки со стрелочкой и поводить курсором по изображению, не нажимая кнопку мыши. Во время этого действия на графике появится точка, которая будет перемешаться из одного положения в другое. В CS3 нет ручки со стрелочкой, просто поводите по изображению курсором с нажатой кнопкой мыши.
Единицы измерения окна Curves (Кривые).
В этом абзаце будет дана скучная, справочная информация для тех, кто любит вдаваться
в подробности, остальные можете ее спокойно пропустить. В окне представлена прямая линия с наклоном в 45 градусов. Это график, который указывает отношение Input [входных, исходных значений (ось Х) к Output выходным, новым значениям (ось Y)]. Для цветовой модели RGB график изменяется от 0 до 255, где тени (0), а света (255). Для модели CMYK значения измеряются в процентах от 0 до 100. В ранних версиях Photoshop изменение положения теней и светов менялось нажатием на двойную стрелку в середине горизонтального градиента под осью Х, что было удобно при работе в нескольких цветовых пространствах. Начиная с Photoshop CS3, можно поменять расположение градиента только переключаясь в разделе Curve Display Options (Параметры отображения кривой).
Пипетки.
Пипетки позволяют установить черную, нейтральную и белую точку изображения. Серая пипетка является инструментом цветокоррекции и для изображений в градациях серого недоступна. Если вы настроили кривую, а затем воспользовались любой из пипеток, первоначальные настройки пропадут. Если же вы сначала воспользуетесь пипетками, а потом внесете изменения в график, то потеряете результат, который дали пипетки.
Значения кнопок.
Кнопка ОК применяет все операции с кривыми к изображению.
Кнопка Cancel (Отмена) отменяет все изменения и закрывает окно. Нажатие на эту кнопку с удержанием клавиши ALT превращает ее в кнопку Reset(Сбросить); Кривая возвращается к исходному состоянию, окно при этом не закрывается.
При нажатии накнопку PresetOptions(Настройки)появляется дополнительное меню Save Preset (Сохранить набор) и Load Preset (Загрузить стиль). Эти команды позволяют сохранить и загрузить вид кривой для использования ее с несколькими изображениями.
Кнопка Smoth (Сгладить) сглаживает линию, нарисованную карандашом. Кнопка активна только при рисовании в режиме карандаш. Кривую лучше изменять с помощью контрольных точек, а не карандаша, чтобы не получить неестественных цветов на изображении.
Кнопка Auto (Авто) автоматически корректирует изображение.
Параметры автоматической коррекции.
Кнопка Options (Параметры) открывает окно Auto Color Corrections Options (Параметры автоматической цветокоррекции). Здесь вы можете настроить работу кнопки Auto (Авто).
EnhanceMonochromaticContrast (Улучшить монохроматический контраст). Аналогична команде Auto Contrast (Авто контраст).
EnhancePerChannelContrast (Улучшить контраст по каналам). Аналогична команде Auto Levels (Авто Уровни).
Find Dark & Light Colors (Найти темные и светлые цвета). Аналогично команде Auto Color.
SnapNeitralMidtones (Привязать к нейтральным серым тонам).
Сетка.
По умолчанию шаг сетки составляет 25 процентов. Для изменения масштаба фоновой сетки нажмите на нее с нажатой клавишей ALT, шаг сетки уменьшится до 10 процентов. Частой сеткой пользоваться удобнее.
Работа в окне Curves (Кривые).
Перемещать окно с изображением, пока открыто окно Curves (Кривые), нельзя, но возможно увеличивать масштаб (CTRL + плюс) или уменьшать его (CTRL + минус).
Щелчок мыши по кривой с нажатой клавишей SHIFT добавляет узловые точки в каналах.
Чтобы задать светлые и темные области, выберите белую или черную пипетку, щелкните курсором мыши на фрагменте изображения. Соответствующий этой области участок кривой будет выделен маленькой квадратной точкой. Таких точек на графике можно установить до 16 (включая крайние).
Удалить точку с кривой можно с помощью клавиши Del или щелкнуть на нее курсором мыши с нажатой клавишей CTRL, а так же можно просто перетащить ее за пределы сетки.
Перемещение среднего входного ползунка Гаммы в Levels (Уровнях) можно сравнить с перемещением средней точки кривой вправо или влево. Перемещение правых и левых входных ползунков в Levels (Уровни) идентично перемещению конечных точек Curves (Кривой) по горизонтали к центру. Перемещение конечных точек кривой к центру по вертикали приводит к отсечению светов или теней также как и перемещение выходных ползунков инструмента Levels (Уровни). Все действия, производимые инструментом Levels (Уровни) – могут выполняться инструментом Curves (Кривые).
Любая коррекция инструментами Levels (Уровни) и Curves (Кривые) приводит к потере пикселей. Вернуть утерянную информацию невозможно. Повторные изменения ведут к еще большей потере данных. Для избежания этого используйте
корректирующие слои. Несмотря на то, что увеличивается расход оперативной памяти, а некоторые функции для корректирующих слоев недоступны, исходная фотография остается без изменения, а значит, многократная коррекция не навредит снимку.
Чтобы сделать изображение светлее, следует поднять центральную точку вверх в область светлых тонов, а для затемнения опустить вниз. Чтобы осветлить тени, следует вначале определить на каком промежутке графика они находятся и закрепить двумя точками света
и средние тона. Затем поднять центральную точку теней вверх, оставляя остальную часть графика нетронутой. Смотрите рисунок «Осветление теней».
Пытаясь добиться улучшения в определенной части тонового диапазона, вы расширяете этот диапазон. Одновременно вы теряете детали в других областях.
Перемещая правый или левый ползунки при нажатой клавише Alt, вы видите, какие пиксели будут безвозвратно потеряны. В том месте, где остановится ползунок, будет назначена самая светлая или самая темная точка в изображении.
Поля числового ввода Input(Вход) и Output (Выход) служат для просмотра и редактирования положения точек на кривой. Поводите курсором по изображению, и вы увидите, как изменяются цифры в полях числового ввода.
Определите, где на кривой начинается и где заканчивается главный объект изображения. Поставьте на кривой точки, ограничивающие занимаемый им диапазон. Опустите по вертикали нижнюю точку и поднимите верхнюю, чтобы кривая стала круче. Контраст в изображении достигается путем осветления светлых участков и затемнения темных. Удаляясь из самых светлых и самых темных областей, он добавляется в средние тона. Чаще всего именно там находится главный объект изображения.
Для снижения контраста следует инвертировать график. Т.е. затенить света и осветлить тени.
S-образная кривая будет выгнута в другую сторону.
Чем круче участок кривой, тем сильнее контраст между цветами этой области. Объекты, которым будут соответствовать крутые участки кривой, приобретут контраст и станут выглядеть лучше. Области которые попадут на пологие участки кривой, контраст потеряют и станут выглядеть хуже (пусть это будут не важные части изображения). S‑образная кривая увеличивает контраст в средних тонах. Самая светлая и самая темная точки остаются без изменений, но одновременно происходит сжатие в областях светов и теней, в результате чего пропадают детали изображения. Чтобы избежать этой потери добавьте дополнительные точки. Поставьте точку ближе к самой светлой – для растягивания светов и ближе к самой черной – для восстановления самых темных теней.
Самая светлая и самая темная точки остаются без изменений, но одновременно происходит сжатие в областях светов и теней, в результате чего пропадают детали изображения. Чтобы избежать этой потери добавьте дополнительные точки. Поставьте точку ближе к самой светлой – для растягивания светов и ближе к самой черной – для восстановления самых темных теней.
Даже минимальное передвижение точки на кривой может привести к серьезным изменениям
в изображении. Улучшая контраст в одной части изображения, мы одновременно должны принести в жертву другие участки. Но добавить контраст — это одно дело, а добиться правильного цвета совсем другое.
Работа с каналами.
Кривые позволяют изменять яркость каналов по отдельности. Согласно цветовому кругу, увеличение одного цвета ведет к уменьшению противоположного ему цвета. При уменьшении красного цвета в изображении прибавится голубой оттенок. При уменьшении синего цвета, изображение станет желтеть. Зеленый и пурпурный также зависят друг от друга.
Если часть тонального диапазона не задействована, а неиспользованные участки расположены на краях гистограммы, то можно передвинуть ползунки к подножью гистограммы. Мы с вами уже проделывали такую операцию с инструментом Levels (Уровни). В этом случае имеет смысл нажать кнопку Auto (Авто):
Крайние ползунки белого и черного сместятся к подножью гистограммы, причем поканально.
Начиная с Photoshop CS3, в диалоговом окне Curves (Кривые) стала видна гистограмма, что очень удобно при работе. В более ранних версиях Photoshop держите открытым окно гистограммы, чтобы контролировать изменения Window (Окно) – Histogram (Гистограмма).
Высокий ключ
Обычные изображения чаще всего улучшаются, если к ним применить S-образную кривую. Изображения в высоком и низком ключе (Снеговик на снегу, черный кот в темной комнате), наоборот, пострадают от ее применения, т.к. главный объект не находится в зоне средних тонов. А для остальных изображений есть простой алгоритм высокого ключа:
Откройте фотографию «33_прически. jpg» (фотография любезно предоставлена фотографом Надеждой Глазовой). Создайте копию фонового слоя, и обесцветьте ее Image (Изображение) –Adjustments (Коррекция) – Desaturate (Обесцветить), но лучше применить Image (Изображение) – Adjustments (Коррекция) – Black—White(Черное-белое).
jpg» (фотография любезно предоставлена фотографом Надеждой Глазовой). Создайте копию фонового слоя, и обесцветьте ее Image (Изображение) –Adjustments (Коррекция) – Desaturate (Обесцветить), но лучше применить Image (Изображение) – Adjustments (Коррекция) – Black—White(Черное-белое).
Фотографию Надежды Акимовой сделала Надежда Глазова
Создайте корректирующий слой Curves (Кривые). Поднимите среднюю точку графика вверх и добавьте еще две точки для плавности.
Вернитесь к черно-белому слою и создайте три его копии. У верхнего назначьте режим наложения (Multiply)Умножение, под ним Overlay (Перекрытие), и два последних обесцвеченных слоя Screen (Экран). Если изображение получится слишком светлым, поменяйте в предпоследнем слое режим на Lighten (Замена светлым).
Теперь нужно вернуть фотографии цвет. Для этого перейдите на фоновый слой и создайте его копию. Переместите эту копию на самый верх списка слоёв. Режим наложения измените на Color (Цветность).
Режим наложения измените на Color (Цветность).
Зажмите клавишу Alt и наведите курсор мыши на границу между корректирующим слоем Curves (Кривые) и нижележащим слоем. Вид курсора изменяется на два кружка со стрелочкой . Таким образом, вы создадите обтравочную маску.
Повторите эту операцию для всех обесцвеченных слоев.
Перейдите на самый верхний слой и создайте корректирующий слой Hue/Saturation (Цветовой тон/насыщенность). Увеличьте насыщенность до +30. Для получения тонированной фотографии отметьте галочкой Colorize (Тонирование) и подберите цветовой тон и насыщенность по вкусу. При необходимости подправьте кривую корректирующего слоя Curves (Кривые) и уменьшите непрозрачность слоев. Выполните сведение слоев. Желательно сделать снимок более резким. Для этого примените фильтр Unsharp mask (Контурная резкость). Осветлите фон по краям: создайте новый слой. Инструментом лассо грубо обведите с большим запасом девушку. Растушуйте выделение Select (Выделение) – Modify (Модификация) – Feather (Растушевка) и инвертируйте выделение Shift+Ctrl+I.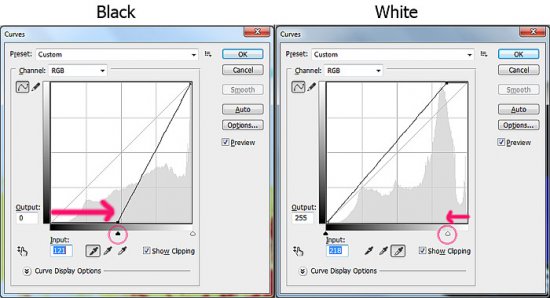 Залейте белым цветом, выбрав инструмент Paint Bucket ( Заливка / ведерко ).
Залейте белым цветом, выбрав инструмент Paint Bucket ( Заливка / ведерко ).
В палитре Layers (Слои) сведите слои, выбрав в контекстном меню правой кнопки мыши FlattenImage (Выполнить сведение).
Низкий ключ.
Низкий ключполучается тоже очень просто, причем Кривые будут нужны лишь 1 раз для повышения контраста:
Создайте копию слоя, измените режим наложения на Multiply (Умножение), непрозрачность – 50. Создайте корректирующий слой Hue/Saturation (Цветовой тон/насыщенность). Ползунок Saturation (Насыщенность) передвиньте на – 50%, режим наложения измените на Darken (Замена темным /Затемнение).
Акимова Надежда
Создайте корректирующий слой Curves (Кривые). Придайте кривой
S-образную форму. Сделать это можно очень просто: выберите в выпадающем списке Preset (Кривые) – Increase Contrast (Повышение контрастности). Вы можете выбрать
и другую предустановку по контрасту или построить кривую самостоятельно. Задайте для корректирующего слоя режим наложения Luminosity (Свечение /яркость).
Задайте для корректирующего слоя режим наложения Luminosity (Свечение /яркость).
Сделайте активным слой Background copy (Фон копия) и выберите в меню Select (Выделение) – Color Range (Цветовой диапазон). В списке Select (Выбрать) возьмите Midtones (Средние тона). Нажмите ОК. Появятся «бегущие муравьи». Растушуйте выделение от 7 до 12 пикселей в зависимости от размера снимка. Сделать это можно через меню Select (Выделение) – Modify (Модификация) – Feather (Растушевка) или нажмите Shift + F6. Примените фильтр Gausian Blur (Размытие по Гауссу) с радиусом 1-4 пикселя. Снимите выделение Ctrl+D.
Затемните фон по краям: создайте новый слой, инструментом лассо обведите с большим запасом девушку, растушуйте выделение и инвертируйте его. Залейте черным цветом. Выполните сведение слоев.
Переведите в ч/б — Image (Изображение) – Adjustments (Коррекция) – Black/White (Черное-белое).
Цветокоррекция в режиме LAB
Улучшить тусклую фотографию можно с помощью коррекции инструментом Curves (Кривые)
в режиме LAB. Для этого переведите изображение в этот режим: меню Image (Изображение) – Mode (Режим) – LAB. В палитре Layers (Слои) выберите корректирующий слой Curves (Кривые).
Для этого переведите изображение в этот режим: меню Image (Изображение) – Mode (Режим) – LAB. В палитре Layers (Слои) выберите корректирующий слой Curves (Кривые).
В канале А (цвета зеленый и пурпурный) сдвиньте черный и белый ползунки на одинаковое количество к центру. В канале В (цвета синий и желтый) выполните те же действия. Если значения будут разными, то произойдет цветовой сдвиг.
С помощью этой простой манипуляции мы расширили цветовой диапазон, не изменяя яркость изображения. Вернитесь в режим RGB через меню Image (Изображение) ‑ Mode (Режим) – RGB.
Пошаговую инструкцию коррекции в режиме LAB смотрите в видеоуроке.
Цветокоррекция по числам (теория).
Владея знаниями цветокоррекции по числам, даже дальтоник достигнет хорошего результата
в редактировании безнадежно испорченных фотографий. Даже на некалиброванном мониторе можно задать правильные цвета для вывода на печать. Здесь нет творчества, зато есть анализ. Вы знакомы с палитрой Info (Инфо)? Разбираетесь в цветовых режимах? Знаете, как устроены режимы RGB, CMYK, Lab или хотя бы один из них? Если хотите освоить инструмент Curves (Кривые) в полную силу, придется все это изучить. В этом уроке мы лишь слегка коснемся изучения цветовых пространств, т.к. это слишком большая самостоятельная тема. Но даже знание основных правил поможет понять принцип работы.
Вы знакомы с палитрой Info (Инфо)? Разбираетесь в цветовых режимах? Знаете, как устроены режимы RGB, CMYK, Lab или хотя бы один из них? Если хотите освоить инструмент Curves (Кривые) в полную силу, придется все это изучить. В этом уроке мы лишь слегка коснемся изучения цветовых пространств, т.к. это слишком большая самостоятельная тема. Но даже знание основных правил поможет понять принцип работы.
Основное правило Дэна Маргулиса: «Всегда используйте полный диапазон доступных тонов и не предлагайте зрителю цветов, наличие которых, в данном изображении противоречит здравому смыслу». В некоторых (простых) случаях цвета, которые должны получиться, известны заранее. Например, седые волосы, окрас пингвина и далматинца должны быть нейтральны. В других (сложных) случаях цвет нам неизвестен, зато мы знаем, каким он точно быть не может (зеленые волосы, фиолетовые коты, синяя трава). Когда мы убираем цвета, которые не могут быть правильными, заменяем их, по меньшей мере, допустимыми, улучшения видны невооружённым глазом.
Тандем палитры Info (Инфо) и инструмента пипетка.
Теперь приступим непосредственно к анализу изображения. Для этого нам понадобится палитра Info (Инфо) и инструмент Eyedropper (Пипетка). Посмотрите на панель параметров этого инструмента. Давайте настроим его правильно. Принятый по умолчанию параметр Point (Точка) в выпадающем меню Point Sample (Размер образца) означает, что палитра Info показывает данные, считываемые только с одного пикселя, который может оказаться посторонней пылинкой, не имеющей ничего общего с изображением.
В выпадающем меню выберите среднее 3х3 или 5х5. Выбрав 3х3 Average (Среднее 3х3), палитра Info (Инфо) покажет значения, усредненные по девяти пикселям; а 5 by 5 Average (Среднее 5х5) даст усреднение по двадцати пяти пикселям.
Любую из двух половин палитры Info (Инфо) можно настроить так, чтобы она показывала цвет в другом цветовом пространстве. Чтобы сделать это, щелкните по значку пипетки в палитре Info (Инфо) и выберите тот режим, в котором вы чувствуете себя увереннее. Проще всего определять нейтральные тона в режиме Lab. Поводите пипеткой по изображению и проследите, как меняются цифры в тенях, светах и средних тонах. Найдите нейтральные объекты и проанализируйте их на предмет цветового сдвига.
Проще всего определять нейтральные тона в режиме Lab. Поводите пипеткой по изображению и проследите, как меняются цифры в тенях, светах и средних тонах. Найдите нейтральные объекты и проанализируйте их на предмет цветового сдвига.
Подсказка: В RGB, нейтральный цвет — серый, белый, черный имеет одинаковые значения во всех трех каналах. Белый – R255, G255, B255. Черный – R0,G0,B0. 50% Серый – R128, G128, B128.
В CMYК нейтральный цвет должен содержать одинаковое количество пурпурного и желтого, но несколько большее количество голубого. Для светов установите значение С5, М2, Y2.
В LAB нейтральный цвет (серый, белый, черный) = 0.
Инструментом Color Sampler (Цветовой эталон) , находящимся на панели инструментов в одной связке с пипеткой , или инструментом пипетка с одновременным удержанием клавиши SHIFT можно выбрать до 4 точек на изображении. При этом палитра Info (Инфо) увеличится. Эта информация будет полезна при редактировании кривых, т. к. можно одновременно наблюдать за изменениями, происходящими во всех четырех точках.
В палитре Layers (Слои) добавьте корректирующий слой Curves (Кривые). Поставьте точку на кривой и сдвиньте ее. Поводите курсором по изображению. В палитре Info (Инфо) вы заметите изменения. Рядом с цифрами, обозначающими первоначальный цвет, через дробь, будут добавлены новые цифры. Они обозначают новый цвет для каждого участка, на который вы наведете курсор.
Цветокоррекция по чилам (практика).
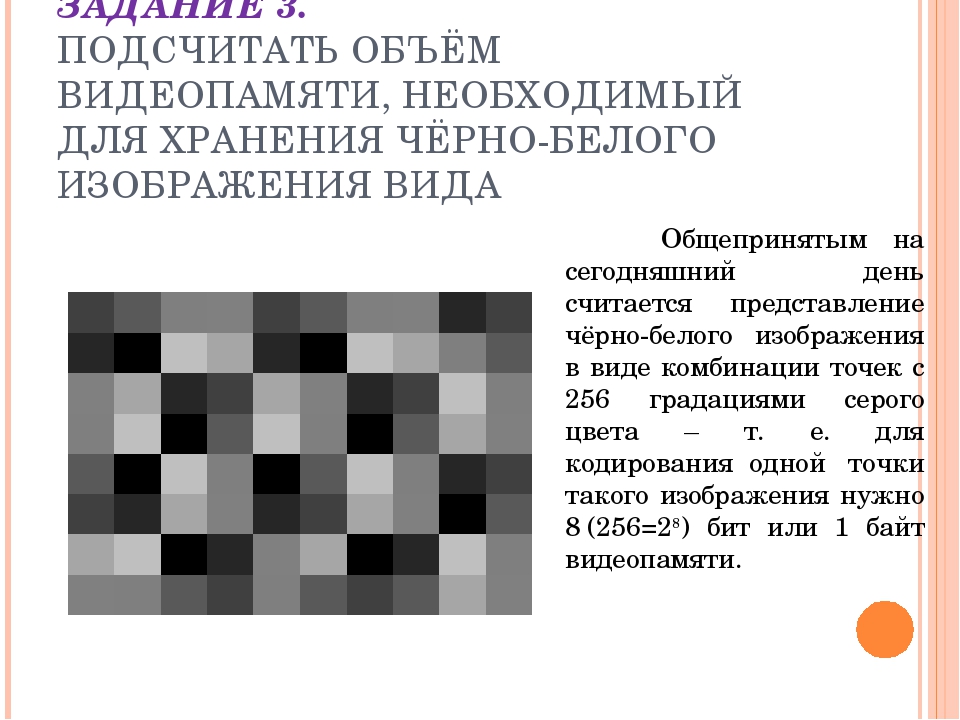
В видеоуроке мы подробно разбираем цветокоррекцию по числам. Вы увидите процесс возвращения правильных цветов на примере фотографии, сделанной в Лапландии. Правая часть палитры Инфо будет настроена на режим Lab. Белый снег должен показывать значение 0 в каналах А и В. Сосны должны быть зелеными. Это значит отрицательные значения должны быть в канале А. Лица людей не должны быть синими и зелеными, а значит в каналах А и В должны быть положительные значения.
Таблица памятных цветов.
Ниже приведена таблица для начинающих MemorableColours (Памятных цветов). Автор: Модест Осипов ([email protected]) собирал эти цвета около 12 лет. Спасибо ему за этот очень нужный и полезный труд. Не нужно учить ее наизусть как таблицу умножения. Цвета могут сильно отличаться в зависимости от освещения. В таблице они характеризуют зону средней освещённости. Пользуйтесь ей с погрешностью на внешние факторы. Начинайте с поиска самой светлой значимой точки, затем найдите самую темную точку. Следующий этап это поиск серых нейтральных тонов или кожи и в заключении остальные памятные цвета.
| Цвет | sRGB | Lab | CMYK[Euroscale Coated v2] | Adobe RGB (1198) |
| Белый | 247.247.247 | 97.0.0 | 4.3.3.0 | 246.246.246 |
| Серый | 132. 132.132 132.132 |
55.0.0 | 54.41.41.7 | 131.131.131 |
| Чёрный | 17.17.17 | 5.0.0 | 84.70.70.80 | 24.24.24 |
| Телесные тона | ||||
| Ребёнок | 239.201.184 | 84.12.14 | 5.25.25.0 | 228.200.183 |
| Гламур | 241.212.198 | 87.9.11 | 5.20.20.0 | 233.210.197 |
| Белая раса | 234.178.146 | 77.18.25 | 5.20.20.0 | 218.176.145 |
| Загар | 218.151.108 | 69. 23.33 23.33 |
15.45.55.0 | 202.150.111 |
| Жёлтая раса | 235.188.150 | 80.14.26 | 7.30.40.0 | 233.187.151 |
| Мулат | 208.138.196 | 64.25.34 | 20.50.60.0 | 190.136.98 |
| Афроамериканец | 91.45.16 | 25.20.28 | 60.80.100.40 | 83.50.25 |
| Природа | ||||
| Листва/трава весной | 196.201.98 | 79.12.50 | 30.10.70.0 | 196.200.105 |
| Листва/трава летом | 126.166.60 | 63. 26.48 26.48 |
60.15.90.0 | 137.163.70 |
| Хвоя | 70.134.55 | 50. 33.35 | 75.15.90.20 | 94.132.63 |
| Небо днём | 0.200.255 | 74.32.42 | 70.0.0.0 | 100.200.255 |
| Небо утром/ранним вечером | 0.160.255 | 61.17.65 | 70.15.0.0 | 45.158.255 |
| Небо поздним вечером | 0.52.180 | 20.10. 85 | 100.75.0.40 | 0.55.175 |
| Материалы | ||||
| Золото (жёлтое) | 216.177.77 | 74. 7.55 7.55 |
0.20.70.20 | 200.174.84 |
| Золото (светлое) | 238.223.160 | 89. 1.33 | 0.5.40.10 | 234.222.162 |
| Продукты питания | ||||
| Лимон (кожура) | 255.239.42 | 94.6.86 | 0.0.85.0 | 255.239.70 |
| Узбекский лимон (кожура) | 255.212.6 | 87.4.86 | 0.15.90.0 | 244.212.50 |
| Лайм | 100.164.33 | 61.37.55 | 70.10.100.0 | 121.162.52 |
| Клубника | 232.51.0 | 52. 67.67 67.67 |
0.90.100.0 | 200.55.0 |
| Малина | 231.51.99 | 53.69.18 | 0.90.40.0 | 200.56.100 |
| Вишня | 159.2.69 | 34.58.9 | 30.100.50.20 | 134.4.69 |
| Черешня | 112.0.29 | 22.45.19 | 30.100.70.50 | 95.0.33 |
| Банан (кожура) | 255.223.78 | 90.1.72 | 0.10.75.0 | 248.223.91 |
| Банан (мякоть) | 255.239.182 | 95.0.30 | 0.5.35.0 | 252.239.184 |
| Черника | 31.60.111 | 25. 4. 34 4. 34 |
100.85.35.0 | 45.62.109 |
| Кокос (мякоть) | 247.246.243 | 97.0.2 | 4.3.5.0 | 247.246.242 |
| Киви (мякоть) | 113.157.82 | 60.26.34 | 65.20.80.0 | 126.155.87 |
| Апельсин (кожура) | 240.132.0 | 66.38.80 | 0.55.100.0 | 215.129.0 |
| Мандарин (кожура) | 234.90.0 | 58.55.72 | 0.75.100.0 | 206.91.0 |
| Помидор (парниковый) | 230.0.4 | 49.76.63 | 0.100.100.0 | 198.0.13 |
| Помидор (грунтовой) | 231. 51.44 51.44 |
52.68.50 | 0.90.80.0 | 200.53.47 |
| Кетчуп | 209.0.14 | 45.70.56 | 15.100.100.0 | 180.4.21 |
| Укроп/петрушка | 64.157.41 | 58. 45.49 | 80.10.100.0 | 103.157.56 |
| Молочный шоколад | 161.81.24 | 44.31.46 | 20.65.90.30 | 142.82.34 |
| Чёрный шоколад | 70.19.10 | 15.24.18 | 50.85.90.65 | 63.27.20 |
| Рис | 247.244.237 | 96.0.4 | 4.4.8.0 | 245.243.235 |
| Красное вино | 117. 0.36 0.36 |
23.48.16 | 25.100.60.50 | 100.0.38 |
Советы:
1. Неправильный выбор точки светов часто является самым верным способом испортить изображение. Блики нельзя рассматривать, как самую светлую, значимую точку. В них нет никакой информации, а значит, их нельзя улучшить. При выборе белой точки не указывайте белой пипеткой на зубы и белки глаз, т.к. у них всегда есть небольшой оттенок. Даже голливудская улыбка имеет теплый тон. При попытке выбрать зубы как самую белую область, уменьшится количество желтого цвета на всей фотографии и она приобретет цветовой сдвиг в сторону синих тонов. Чёрной пипеткой не выбирайте тёмные волосы.
2. У всех цветовых пространств есть свои сильные и слабые стороны. Для применения кривых очень полезным является черный канал в CMYK. Диапазон CMYK меньше чем RGB поэтому интересующие нас объекты попадают на более короткие участки кривых, которые можно сделать намного круче, чем в RGB. Большая часть деталей находится в черном канале. Однако если вы работаете с RGB-файлом, который не будет печататься в типографии, преобразовывайте его
Большая часть деталей находится в черном канале. Однако если вы работаете с RGB-файлом, который не будет печататься в типографии, преобразовывайте его
в CMYK только в исключительных случаях; можно использовать LAB или остаться в RGB.
3. Синий канал RGB и желтый в CMYK мало влияют на контраст.
4. Для зеленых объектов самыми темными каналами будут либо красный и синий в RGB, либо голубой и желтый в CMYK. При создании кривых необходимо быть особенно внимательным и не делать красный таким же темным, как синий, иначе деревья приобретут зелено-голубой оттенок.
Коррекцию начинайте от самого темного к светлому каналу. В RGB – Синий, Красный, Зеленый, в СМYK – Желтый, Голубой, Пурпурный.
5. Объединенная кривая или Мастер-Кривая дает хороший результат для нейтральных объектов. С изображениями, в которых один или несколько цветов главные, лучше проводить коррекцию поканально.
6. Если установить для теней значение R0,G0,B0, тени становятся черными, и вся имеющаяся в них информация пропадает. Для изображений, которые не содержат важных деталей в тенях и полутенях, можно выбирать для теней R0,G0,B0, а для светов R255,G255,B255. В большинстве случаев лучше остановить свой выбор для теней R15,G15,B15, а для светов R247,G247,B247.
Для изображений, которые не содержат важных деталей в тенях и полутенях, можно выбирать для теней R0,G0,B0, а для светов R255,G255,B255. В большинстве случаев лучше остановить свой выбор для теней R15,G15,B15, а для светов R247,G247,B247.
7. На фотографии лица человека должен присутствовать желтый оттенок, т.к. теплые тона воспринимаются людьми лучше, чем холодные. Исключение составляют люди с кожей красного, желтого и черного цвета.
8. Если файл печатается в RGB —используйте для теней значение 15R15G15B, если, конечно, вы не уверены в том, что ваше выводное устройство сохранит детали и при меньшем значении.
Горячие клавиши:
CTRL + щелчок по изображению – устанавливает узловую точку в канале.
CTRL+SHIFT + щелчок по изображению – добавляет узловые точки во все каналы кроме основного.
SHIFT + щелчок по кривой – добавляет точки, которые можно перемещать одновременно.
SHIFT + щелчок по уже установленным точкам на кривой – выделяет их (точки закрашиваются черным цветом) и их можно передвигать все вместе.
CTRL + D снимает выделение со всех точек.
Стрелки позволят перемещать выделенные узловые точки.
Вопросы:
- Какую клавишу надо нажать для изменения масштаба фоновой сетки?
– Shift.
– Ctrl.
– Alt.
– Tab.
– Пробел.
- Сколько точек можно выбрать на изображении инструментом Color Sampler (Цветовой Эталон)?
– 1
– 2
– 3
– 4
– Сколько угодно.
- Для придания изображению контраста нужно…
– Опустить среднюю точку немного вниз.
– Поднять среднюю точку немного вверх.
– Придать кривой S-образную форму.
– Нажать кнопку Авто.
- Сколько точек можно установить на графике?
– 1.
– 5.
– 10.
– 16.
– 21
Домашнее задание:
- Откройте файл велосипеды.jpg. Откорректируйте его при помощи корректирующего слоя кривые.
- Откройте файл прически.jpg. Переведите изображение в высокий и низкий ключ.
- Откройте файл прудик.jpg. Откорректируйте его при помощи корректирующего слоя кривые.
- Откройте файл лапландия.jpg. Откорректируйте его при помощи корректирующего слоя кривые.
Отзывы и замечания учеников из группы тестирования учебника. Ответы на заданные вопросы добавлены в урок:
Настя: — По поводу урока. Я читала статьи про использование кривых и сейчас пользуюсь часто этим инструментом в коррекции, так как знаю его возможности. Твой урок объединяет все знания. В принципе, мне понравился как написан. Все основы упомянуты (где света на графике, где тени, как улучшить контраст, коррекция по каналам) и для новичков может стать открытием данный урок. Честно говоря, не вникала в часть с подробностями, так как знаю, что мало что из этого запомню. Очень хорошо показаны в текстовой части примеры графиков (как затемнить, осветлить, повысить контраст.
) Кстати, очень полезные советы даны в текстовой части!!!!! Коррекция по числам мне осталась непонятной, может потому что не очень в это вникала. Полезным в понимании урока стало выполнение ДЗ. Все основные возможности коррекции рассмотрены. А низкий и высокий ключ в фотографии даны как просто дополнение и мини уроки по коррекции? Мне, кстати, понравились эти результаты!!!
B.Olga.B: — Очень нужный урок! Спасибо большое за него!!! Пока смотрела видео-урок все было легко и понятно, а как взялась за домашнее задание, оказалось не все так просто….. Долго мучилась с Лапландией, но она так и не поддалась Спасибо большое!!!
Елена З: — Здравствуйте, Светлана, кривые в своей работе использовала только канал RGB, различную форму кривой задавала в зависимости от яркости, контрастности. Но теперь пригодится и по отдельным каналам убирать лишний цвет. В принципе у меня нет таких фотографий с кардинальным световым сдвигом, но возьму на вооружение.
Бабенко Юлия: — Ох и трудным урок мне показался, сидела долго, мучительно, очень намучилась с высоким и низким ключом. Высылаю все результаты, а ты подскажи что да как) Очень трудно дался этот урок, хотя объяснения вполне нормальные.
Елена Михайлова: (Автор: — Елена вместо отзыва подкорректировала мне этот урок. Нашла целую кучу ошибок, которые я впоследствии исправила. Лена, огромное Вам за это спасибо!!!! )
Панова Светлана: — Светлана, Вы совершенно правы, урок о кривых самый сложный из всех предыдущих. Долго пробовала выполнить коррекцию фотографий и надеюсь, что у меня получилось. При выполнении задания вызвали сложности коррекции фотографий в высоком и низком ключе, возможно из-за того, что в видио уроке объяснение было на другой фотографии и сравнить свой промежуточный результат не с чем. Сам урок написан очень хорошо, вот только в конце видио урока (при объяснении домашнего задания) очень отличается звуковой диапазон голоса.
В остальном все отлично. Спасибо за урок!
Надежда Диденко: (Автор: — Надежда, Вы мой ангел-корректор! Было очень много ошибок в тексте урока, и вы его просто спасли от злобных критиков перед публикацией. Большое Вам человеческое спасибо!)
Коррекция кривых фотографии в приложении «Фото» на Mac
Используя коррекцию кривых, можно изменить яркость и контрастность фотографии. Вы можете настроить общий внешний вид фотографии, изменить внешний вид определенных цветов (красного, зеленого и синего), а также задать настройки для точки черного, средних тонов и точки белого.
В режиме коррекции кривых отображается гистограмма с диагональной линией, проходящей от точки черного (левый нижний угол) до точки белого (правый верхний угол). Чтобы настроить яркость или контрастность фотографии, Вы можете добавить точки на линию в тех местах, где Вы хотите внести изменения. Перетяните точку вверх для увеличения яркости; перетяните точку вниз для уменьшения яркости. Перетяните точку влево для увеличения контрастности; перетяните точку вправо для уменьшения контрастности.
Перетяните точку влево для увеличения контрастности; перетяните точку вправо для уменьшения контрастности.
Открыть приложение «Фото»
В приложении «Фото» на Mac дважды нажмите фотографию, затем нажмите «Редактировать» в панели инструментов.
Нажмите «Коррекция» на панели инструментов.
В панели «Коррекция» нажмите стрелку рядом с пунктом «Кривые».
Выполните одно из следующих действий.
Автоматическая коррекция кривых фотографии. Нажмите раскрывающееся меню «Кривые», выберите «RGB» или цвет, который хотите откорректировать, затем нажмите «Авто».
Ручная настройка точки черного, средних тонов и точки белого на гистограмме. Нажмите кнопку «Пипетка» для точки, которую хотите изменить, затем нажмите участок на фотографии, который наилучшим образом представляет точку черного, средние тона или точку белого на фотографии.
Точка черного. Настраивает уровень, при котором черные области становятся совершенно черными (невозможно разглядеть ни одной детали).

Средние тона. Настраивает осветление или затенение средних участков фотографии.
Точка белого. Настраивает уровень, при котором белые области становятся совершенно белыми.
Вы также можете перетянуть верхний или нижний манипулятор диагональной линии на гистограмме, чтобы изменить диапазон корректировки точки черного и точки белого. Например, чтобы настроить точку белого на гистограмме, перетяните верхний манипулятор в новое место.
Ручная настройка кривых для цветов на фотографии. Нажмите кнопку «Добавить точки», затем нажмите участки на фотографии, которые хотите изменить. Каждое нажатие добавляет на диагональную линию гистограммы новую точку. Для добавления точек также можно нажимать диагональную линию гистограммы. Добавив точки, перетяните их для коррекции яркости и контрастности фотографии.
Изменение красного, зеленого или синего цвета на фотографии. Нажмите раскрывающееся меню «Кривые», затем выберите цвет, который хотите изменить.
 Нажмите кнопку «Добавить точки», затем нажмите участки на фотографии, которые хотите изменить. Перетяните точки, добавленные на диагональную линию, чтобы настроить этот цвет на фотографии.
Нажмите кнопку «Добавить точки», затем нажмите участки на фотографии, которые хотите изменить. Перетяните точки, добавленные на диагональную линию, чтобы настроить этот цвет на фотографии.
5 способов сделать коррекцию цвета / Фотообработка в Photoshop / Уроки фотографии
Прежде чем начать знакомство с цветокоррекцией, стоит уточнить, что тема эта очень обширная. Чтобы заниматься цветокоррекцией на должном уровне, лучше пройти специальные курсы, где вас обучат основам цветовой гармонии, научат правильно сочетать цвета и пользоваться существующими методами и способами цветокоррекции. И желательно получить сертификат. В век цифровых технологий обработка фото — весьма прибыльное занятие. А самым выгодным вложением средств во все времена было и остаётся образование.
Мы рассмотрим базовый универсальный способ цветокоррекции.
Перед тем как сделать цветокоррекцию в Photoshop, нужно понять, что это такое и с какой целью применяется.
Цветокоррекция — это изменение цветов, тонов и насыщенности изображения,
применяется либо для улучшения картинки, либо в качестве творческого приёма. К первому случаю можно отнести необходимость получить более реалистичные цвета или сделать фото светлее. Ведь при определённых настройках фототехники цвета могут передаваться искажённо, не так, как мы их видим в реальной жизни. Сюда же относится коррекция фото для поднятия насыщенности цветов, ради большей привлекательности снимка. Во втором случае цветокоррекцию подскажет вам собственная фантазия. Это может быть винтажная цветокоррекция, фантастические цвета пейзажей и тому подобное.
К первому случаю можно отнести необходимость получить более реалистичные цвета или сделать фото светлее. Ведь при определённых настройках фототехники цвета могут передаваться искажённо, не так, как мы их видим в реальной жизни. Сюда же относится коррекция фото для поднятия насыщенности цветов, ради большей привлекательности снимка. Во втором случае цветокоррекцию подскажет вам собственная фантазия. Это может быть винтажная цветокоррекция, фантастические цвета пейзажей и тому подобное.
Коррекция цвета в Photoshop осуществляется на корректирующих слоях. Если цветокоррекцию применять к слою с изображением, то изменения изображения будут необратимы. Корректирующие слои работают как фильтры. Все эффекты корректирующего слоя будут видны на изображении под этим слоем. Также корректирующий слой позволит внести изменения в конечный результат, если это окажется необходимо. Тему слоёв мы обсуждали в предыдущей статье.
Автоматическая цветокоррекция
Самый простой и быстрый способ для новичков — автоматическая цветокоррекция. Откройте изображение в Photoshop, создайте дубликат слоя с изображением (Ctrl+G). Перейдите на дубликат слоя и нажмите Shift+Ctrl+B. Эта команда Photoshop автоматически регулирует контраст и цвет изображения, самостоятельно определяя тени, средние тона и светлые участки.
Откройте изображение в Photoshop, создайте дубликат слоя с изображением (Ctrl+G). Перейдите на дубликат слоя и нажмите Shift+Ctrl+B. Эта команда Photoshop автоматически регулирует контраст и цвет изображения, самостоятельно определяя тени, средние тона и светлые участки.
Так выглядят снимки до и после автоматической цветокоррекции.
После обработки
Цветовой тон/Насыщенность
Открываем изображение в Photoshop. На палитре слоёв находим список корректирующих слоёв, нажав пиктограмму полузакрашенного круга.
В списке выбираем «Цветовой тон/Насыщенность»/Hue/Saturation.
В диалоговом окне настроек слоя можно изменять «Оттенок цветов»/Hue, «Яркость»/Lightness (сделать снимок светлее или темнее) и «Насыщенность цветов»/Saturation (делать блеклыми или сочными оттенки).
Изображение можно разбить на цветовые каналы. Настройки позволяют работать со всеми каналами цветов одновременно либо с одним.
При работе с отдельным цветовым каналом, выбирая определённый оттенок, который необходимо изменить, пользуйтесь инструментом «Пипетка». Нажмите на пиктограмму инструмента, подведите к нужному участку фото и сделайте один клик. Вы увидите ограничители на градиентах. На цветовых градиентах можно ограничить цветовой диапазон, тогда изменения будут происходить только в нём. Передвигая ограничители, вы зададите рабочий диапазон.
Далее, перемещая ползунки цветового тона, насыщенности и яркости, остаётся подобрать настройки соответственно вашей задаче. Придадим данному снимку пурпурный оттенок, чтобы получить более красочный закат. Для этого выберем синий канал. Ограничитель диапазона на градиенте перетаскиваем правее, чтобы захватить диапазон пурпурных оттенков. Ближе к пурпурному смещаем ползунок «Цветовой тон»/Hue, добавляем насыщенность. По завершении закрываем окно настроек.
Вот так получилось.
После обработки
Еще больше о Photoshop можно узнать на курсе «Photoshop. Тоновая и цветовая коррекция» в Fotoshkola.net .
Тоновая и цветовая коррекция» в Fotoshkola.net .
Кривые
Корректирующий слой «Кривые»/Curves имеет больше способностей, чем мы рассмотрим в базовом способе для начинающих.
Открываем изображение, вызываем корректирующий слой «Кривые»/Curves из списка корректирующих слоёв.
Откроется диалоговое окно с настройками. Изначально кривая выглядит прямой. Нас интересует инструмент «Пипетка». Их три. Первая отвечает за тени, вторая — за средние тона, третья — за светлые.
Теперь берём пипетки по очереди: первой щёлкаем по самому чёрному участку фото, второй — по серому, третьей — по самому белому участку.
С применением каждой пипетки вы увидите изменения. На графике появятся кривые цветовых каналов RGB (красный, зелёный, голубой). По завершении окно кривых можно закрыть.
В итоге получится вот так.
После обработки
Уровни
Для корректирующего слоя «Уровни»/Levels мы так же рассмотрим лишь базовый способ применения.
Растровое изображение, а в данном случае изображение наших фото, состоит из точек. Точки эти имеют каждая свой цвет. За насыщенность, яркость и свет отвечают точки чёрного, серого и белого в изображении. Корректирующий слой «Уровни»/Levels позволяет изменять уровень значения точки. Уровень 0 — чёрные пикселы, 255 — белые. Уровень 128 — серые. Оставшиеся уровни располагаются в диапазоне между 0 и 255. При перераспределении уровней изменяется тональный диапазон изображения.
Для быстрой цветокоррекции нужно перераспределить уровень средних тонов. Открываем изображение, в списке корректирующих слоёв выбираем «Уровни»/Levels.
В диалоговом окне настроек выбираем среднюю пипетку, которая отвечает за средние тона. На изображении кликаем по участку, где должен быть идеальный серый. Потом закрываем окно настроек. Таким образом подбираются равные значения красного, зелёного и голубого.
В итоге мы получаем уравновешенную насыщенную картинку.
После обработки
Цветовой баланс/Color Balance
Название этого корректирующего слоя говорит само за себя. Этот инструмент позволяет изменять цвета в тенях, средних тонах и светах.
Откроем изображение и вызовем корректирующий слой «Цветовой баланс»/Color Balance.
В диалоговом окне будем поочерёдно подбирать цвета в тенях, средних тонах и свете.
Подбор цвета осуществляется сдвигом ползунков на градиентах отдельных оттенков. Так можно сделать зелёный и розовый более насыщенными.
Настройки в средних тонах.
В тенях.
В светах.1
Как видите, мы двигали ползунок на градиенте пурпурный-зелёный в сторону пурпурного в средних тонах и в светах. Так мы повысили насыщенность цветов. Оттенок зелёного изменили, сдвинув ползунок в сторону зелёного в тенях. Наш результат: зелёный цвет ближе к тому, что мы видим своими глазами в природе; цветы стали насыщенней по окраске.
После обработки
С помощью цветокоррекции можно полностью изменить настроение картинки. Даже используя эти простые примеры, скучные снимки можно сделать интересными. Не останавливайтесь на достигнутом. Изучайте темы глубже. Больше практики, у вас обязательно получится!
Еще больше о Photoshop можно узнать на курсе «Photoshop. Тоновая и цветовая коррекция» в Fotoshkola.net .
Фотографический — обычно дает менее насыщенные цвета, чем вариант «Презентация», при печати цветов вне гаммы. Этот стиль сохраняет соотношение тонов в изображениях. |
Фотографии, в том числе отсканированные изображения, фотографии из фотобанков на компакт-дисках и цифровые фотографий. Фотографический масштабирует диапазон тонов оттенков серого в источнике в соответствии с доступным диапазоном тонов в устройстве вывода. |
Изображение, контрастность и субъективно воспринимаемый |
Презентация — создает насыщенные цвета, которые не имеют точного соответствия отображаемым цветам. Обеспечивает хорошее отображение цветов в пределах гаммы, например телесных цветов. Этот стиль похож на «Фотографический» способ цветового пересчета. |
Изображения и графики на презентациях. Этот стиль можно использовать для смешанных страниц, содержащих иллюстрации и фотографии. Презентация увеличивает контрастность для оттенков серого. |
Насыщенность, графика |
Относительный колориметрический — обеспечивает трансформацию белой точки между исходной и целевой белой точками. Например, голубовато-белый (серый) цвет монитора заменяется бумажно-белым. Этот стиль устраняет видимые границы между пустыми пространствами и белыми объектами. |
Широко используется, если важно обеспечить согласование цветов, но белый цвет в документе должен быть напечатан как белый цвет бумаги. Относительный колориметрический, используемый по умолчанию цветовой пересчет для печати с оттенками серого, который еще лучше сохраняет оттенки серого по сравнению с предыдущими версиями продуктов Fiery. |
Относительный колориметрический |
|
Абсолютный колориметрический — не обеспечивает трансформации белой точки между исходной и целевой белой точками. Например, голубовато-белый (серый) цвет монитора не заменяется бумажно-белым. |
Ситуации, когда необходимо точно передать цвета, а видимые границы не являются значительным недостатком. Абсолютный колориметрический обеспечивает ограничение гаммы в деталях в светах и тенях. |
Абсолютный колориметрический |
Печать серого RGB/CMYK только черным
Если включен параметр Печать серого RGB только черным, печать любого цвета RGB, имеющего одинаковые значения R, G и B, выполняется черным цветом только с компонентом K (вместо черного CMYK). Аналогично, если включен параметр Печать серого CMYK только черным, печать любого цвета CMYK, у которого значения C, M и Y равны нулю, а K имеет любое значение, выполняется черным цветом только с компонентом K (вместо черного CMYK).
Можно включить параметр Печать серого RGB только черным или Печать серого CMYK только черным для варианта Текст/графика и для варианта Текст/графика/изображения. Графика означает векторную графику. Изображения означают растровые изображения.
Примечание: Также можно включить параметр Печатать серый только черным для входного профиля с оттенками серого с теми же вариантами: Текст/графика и Текст/графика/изображения.
Применяются следующие ограничения.
Параметры Печать серого RGB только черным и Печать серого CMYK только черным не оказывают влияния на задания, отправленные в виде цветоделения.
Если для параметра Цветовой пересчет CMYK задано значение Чистые первичные цвета, параметр Печать серого CMYK только черным не влияет на результат печати.
Если включен параметр Цветоделение RGB/Lab через источник CMYK, параметр Печать серого RGB только черным выключен. Аналогично, если включен параметр Печать серого RGB только черным, нельзя включить Цветоделение RGB/Lab через источник CMYK.
Если для параметра Черный текст и графика задано значение Истинно черный вкл. или Глубокий черный вкл., он имеет приоритет над параметрами Печать серого RGB только черным и Печать серого CMYK только черным для полностью черного текста и графики.
Если серый цвет указан как плашечный, параметры Печать серого RGB только черным и Печать серого CMYK только черным не влияют на серый цвет.
НОУ ИНТУИТ | Лекция | Цветокоррекция
Аннотация: В данной лекции мы продолжим разговор о манипулировании тонами отдельных цветовых каналов, т.е. цветокоррекции. Подробно остановимся на изменении режима и потери информации, затронем тему коррекции и градационного преобразования цветных изображений и, конечно, поговорим о инструментах цветокоррекции.
Изменение режима и потеря информации
На протяжении курса мы постоянно твердим о том, что все манипуляции с изображением в Photoshop ведут к утери части информации. Тем не менее очень многие пользователи, включая так называемых специалистов, даже не подозревают, что переключение на другой цветовой режим отбрасывает информацию быстрее, чем какое бы то ни было другое действие.
Работая с файлами 16 битов на канал, вы имеете достаточно данных, чтобы допускать потери, хотя они все же случаются, но для файлов 8 битов на канал на счету каждый бит.
С темой преобразований из одного режима в другой связано много путаницы и большое число «мифов» Мы будем приводить доказательства на протяжении всей лекции, но отметим сразу, что со сменой цветового режима, то есть с переводом изображения из одного цветового пространства в другое, происходит утрата значительной доли информации, при этом неважно, из какого режима и в какой выполняется преобразование (единственное исключение – из режима градаций серого в RGB). При переводе из RGB в Lab, из Lab в CMYK, из RGB в CMYK и обратно информации теряется гораздо больше, чем думают многие. (В случае преобразований между различными цветовыми пространствами в одном режиме: из RGB в RGB или из CMYK в CMYK также теряется информация, особенно если они имеют различные цветовые охваты или показатели растискивания.) Алгоритмы цветового преобразования значительно улучшены в Photoshop 6 по сравнению с предыдущими версиями, но все еще сопровождаются некоторой потерей данных.
Добавление шумов и потеря данных
В Photoshop 6 включена возможность добавления шумов для преобразований 8-битовых изображений (см. «Флажок Use Dither [8-bit/channel images]» в «Параметры цвета» ). Добавление шумов позволяет избежать постеризации, но вы должны понимать, что это не устраняет потери данных, а только маскирует ее путем добавления некоторого уровня шума после того, как часть данных ушла в «мусорную корзину». Добавление шума может помочь избежать видимой постеризации, но не сохраняет деталей: отличие заключается в деталях, а шум добавляется случайным образом.
Если вы хотите повторить наши эксперименты и увидеть, что происходит с данными, когда происходит преобразование между цветовыми пространствами, отключите флажок Use Dither (8-bit/channel images) в диалоговом окне Color Settings.
Из RGB в Lab
Среди пользователей Photoshop распространено убеждение в том, что перевод изображения из режима RGB в Lab и обратно особых потерь информации не вызывает. Мы также разделяли эти представления до тех пор, пока не проделали специальные тесты. К нашему удивлению, преобразование из RGB в Lab оказалось далеко не безобидным. В результате теряется немало различий между уровнями, а, как мы уже знаем, различия – это детали изображения.
Попробуйте преобразовать шкалу в градациях серого из режима RGB в режим Lab (это всего лишь одно лишь обращение к команде Mode (Режим) ) и взгляните на результат: из возможных 256 уровней примерно 35 просто исчезли (см. рис. 7.1). Внешне эта потеря незаметна – вряд ли вы увидите какие-нибудь изменения на экране или в печатном оттиске, но если попробовать растянуть тоновой диапазон, потерпевший ущерб после преобразования, он начнет обнаруживать признаки постеризации.
Гистограмма шкалы градаций серого в режиме RGB (не слишком интересная)
Рис. 7.1. Потеря данных в результате преобразования из RGB в Lab и снова в RGB (Гистограмма шкалы градаций серого после преобразования из RGB в Lab и снова в RGB)
Провалы в гистограмме означают неиспользуемые после преобразования из RGB в Lab уровни, но это еще не все. Пики гистограммы показывают, в каких уровнях значения яркости пикселов были округлены (стали одинаковыми). Все это свидетельствует об утере деталей изображения. Возможно, эти детали не были видны, но они присутствовали в изображении и ждали, когда их сделают видимыми. Теперь же они пропали безвозвратно.
Из CMYK в Lab
Преобразование из CMYK в Lab (и обратно) вызывает несколько большую потерю информации, чем из RGB в Lab, и гистограмма выглядит несколько иначе (см. рис. 7.2). Помимо потери различий между тонами здесь возможно и легкое смещение цветов. Преобразование файла из трехканального в четырехканальное цветовое пространство вызывает больше ошибок округления, чем из трехканального в трехканальное.
Рис. 7.2. Потеря данных в результате преобразования из CMYK в Lab и снова в CMYK
Из RGB в CMYK
Перевод изображений из RGB в CMYK – наиболее распространенный и необходимый вид преобразования в Photoshop – приводит к большой потере информации (см. рис. 7.3). Цветовое пространство RGB включает 16,7 млн. цветов, из которых в четырехкрасочной печати воспроизводятся максимум несколько тысяч. Если преобразование выполнено правильно, печатное CMYK-изображение довольно похоже на экранное RGB-изображение, хотя и содержит гораздо меньше цветов и имеет более узкие динамический диапазон и цветовой охват (см. врезку «Мифы CMYK» далее в этой лекции).
Рис. 7.3. Потеря данных в результате преобразования из RGB в CMYK
Лучшее, на что можно надеяться при выполнении преобразования из RGB в CMYK – это идеальное проецирование данных RGB-оригинала на более узкий охват печатных цветов CMYK. Утрата различий между цветами ведет, как уже неоднократно отмечалось, к потере деталей в изображении.
Из RGB в RGB
Единственным серьезным недостатком идеи рабочего пространства RGB является то, что теперь мы вынуждены конвертировать изображения в выбранное нами рабочее пространство. Как и всякое преобразование из одного цветового пространства в другое, это приводит к потере информации.
Насколько велики потери при этом? В каждом отдельном случае все зависит от самих RGB-пространств – из какого и в какое из них выполняется конвертация. На рис. 7.4 показаны гистограммы нескольких вариантов типичного преобразования.
Одни гистограммы на рис. 7.4 выглядят ужасно, другие – вполне приемлемо. Потери происходят в тех случаях, когда уровень гаммы в обоих RGB-пространствах оказывается разным, а преобразование, например, из Apple RGB в ColorMatch RGB, где гамма составляет 1,8, или из Adobe RGB (1998) в sRGB выполняется практически без потерь. В «Ввод изображений» , рассмотрены способы, позволяющие избежать потери данных при назначении сканированным изображениям рабочего пространства. Основная сложность связана с унаследованными файлами с гаммой 1,8. Это касается только пользователей Macintosh и тех немногих пользователей Windows, которые калибровали свои мониторы под гамму 1,8.
Потеря данных в результате преобразования из RGB в RGB
Гистограмма шкалы градаций серого после преобразования из Adobe RGB в ProPhoto RGB
Гистограмма шкалы градаций серого после преобразования из ProPhoto RGB в Color Match RGB
Гистограмма шкалы градаций серого после преобразования из Adobe RGB (1998) в sRGB
Рис. 7.4. Гистограмма шкалы градаций серого после преобразования из ColorMatch RGB в Adobe RGB (1998)
Мы настоятельно рекомендуем назначать для пространств редактирования гамму 2,2. Она визуально более равномерна, чем гамма 1,8, и обеспечивает присутствие большего объема информации в тенях – именно там, где ее часто не хватает. Однако избежать частичной утери данных при переводе изображений с гаммой 1,8 в рабочее пространство с гаммой 2,2 невозможно, хотя потери эти не столь велики, как при смене цветового режима командами из подменю Mode. Унаследованные файлы большинства пользователей Windows уже имеют гамму 2,2.
Все унаследованные изображения Брюса были в ColorMatch RGB, и он постепенно переводил их либо в пространство BruceRGB, либо в Adobe RGB (1998). Несколько изображений оказались слишком сильно отредактированными или со слишком малым запасом прочности, чтобы выдержать очередную трансформацию, поэтому он переключал их снова на ColorMatch RGB. Однако, по его мнению, в подавляющем большинстве случаев преимущества пространств с гаммой 2,2 перевешивают недостатки одноразового преобразования. Решение принимать вам, но если ваши изображения далеки от постеризации, мы считаем небольшие потери при трансформации вполне разумным компромиссом.
Инструмент «Уровни» (Levels), основы и принцип работы
В Photoshop имеется несколько способов применения «Уровней» к изображению, самый простой из них, который будет использован здесь — применение в виде статической регулировки. Кроме этого, инструмент может быть применён как корректирующий слой, что делает регулировку неразрушающей, а начиная с версии Photoshop CC 2015 мы можем применить «Уровни» (и любые другие настройки изображения Photoshop) как редактируемые смарт-фильтры! Мы рассмотрим, как применять «Уровни» в качестве корректирующего слоя и смарт-фильтра в следующих руководствах. На данный момент наше внимание будет сосредоточено на принципе работы инструмента, так что для упрощения я применю «Уровни» как статическую регулировку.
Сделать это можно через вкладку главного меню Изображение —> Коррекция —> Уровни (Image —> Adjustments —> Levels), либо нажать комбинацию клавиш Ctrl+L.
Поскольку мы собираемся применять «Уровни» непосредственно к самому слою, что делает постоянными изменения в пикселях в изображении, перед применением следует создать копию оригинального слоя, нажав клавиши Ctrl+J. Панель слоёв теперь должна выглядеть как на рисунке:
Панель слоёв с дублированным фоновым слоем.
Слой-копию можно переименовать в содержащее смысл название, давать слоям описательные имена — хорошая привычка.
На данный момент в панели слоёв должна быть выбрана копия фонового слоя. Применяем к слою инструмент «Уровни» одним из перечисленных выше способов, я обычно нажимаю Ctrl+L., после чего открывается диалоговое окно инструмента:
Диалоговое окно «Уровней».
Кстати, то же диалоговое окно мы применяли ранее для изучения гистограммы изображения.
Оценка гистограммы
Гистограмма является графиком, который показывает нам, где и как текущий тональный диапазон изображения (в моем случае, градиента) распределяется между черным и белым. Под графиком гистограммы расположен бар в виде черно-белого градиента, он называется «Выходные значения» (Output Levels).. Этот бар показывает нам полный спектр возможных значений яркости (тональных значений), которые изображение может содержать, от черного слева до белого справа. Всего возможных значений яркости 256, от чёрного (0) до белого (255), и 254 уровня между ними..
Каждый из 256-ти столбцов гистограммы расположен над определённым участком полосы градиента, этот участок показывает значение яркости столбца. Гистограмма не представляет фактическое количество пикселей в изображении, поскольку большинство современных изображений содержат миллионы пикселей, что сделало бы гистограмму слишком большой, чтобы поместиться на экране. Вместо этого она просто даёт нам общее представление о том, сколько имеется пикселей в изображении определенного уровня яркости по сравнению с пикселями других уровней яркости. Чем выше столбец гистограммы — тем большее количество пикселей этого уровня яркости содержится в изображении. Если на каком-либо участке гистограммы столбцы отсутствуют, это значит, что в изображении отсутствуют пиксели этой яркости.
Давайте внимательнее посмотрим на то, что показывает моя гистограмма градиента. В «среднестатистическом» фото гистограмма, как правило, простирается на всём протяжении от чистого черного цвета в крайнее левом положении до чистого белого в крайне правом. Это, как правило, является признаком того, что фотография сделана с нормальным экспонированием и имеет детали по всему тоновому диапазону (тени, полутона и яркие тона). Хотя это бывает это не всегда так, как мы узнали из урока о низком и высоком ключе изображения, но, тем не, менее, это все-таки полезный, общий принцип.
В гистограмме градиента мы видим совсем другое. Вместо того, чтобы простираться через весь тональный диапазон слева направо, моя гистограмма скучена в середине. Обратите внимание на то, что левая часть гистограммы, которая представляет самые темные пиксели изображения, даже близко не начинается из крайнего левого положения. Если мы мысленно проведём вертикальную линию от левого края графика вниз до градиента, то увидим, что левая сторона фактически начинается с более светлого оттенка серого. Это говорит нам, что в данный момент изображение не имеет оттенков темнее, чем пиксели этого серого оттенка. На рисунке ниже я показал это с помощью красной линии:
Левая сторона гистограммы начинается с более светлого, чем черный, оттенка серого.
Аналогичная ситуация и с правой стороны гистограммы — правая часть начинается не с края, а с более тёмного, чем белый, оттенка серого цвета. На рисунке я показал соответствие оттенка цвета изображения точке градиента «выходных значений» и началу графика:
Светло-серый оттенок изображения на графике гистограммы.
Теперь, когда мы рассмотрели гистограмму, мы знаем, что моё изображение с градиентом не имеет чёрных, белых и близких к ним по тону пикселей. Самые темные пиксели изображения в настоящее время светлее, чем черный, самые светлые пиксели темнее, чем белые, всё это приводит к снижению общего контраста. Далее мы поговорим о том, как это легко исправить, ведь тени должны быть темнее, а светлые области — светлее.
Регулировка ползунками чёрных и белых точек
Итак, как же мы можем улучшить тоновый диапазон с помощью «Уровней»? На нижней стороне графика гистограммы имеются три ползунка: слева чёрный, права белый, а посередине — серый. Каждый из этих ползунков управляет определённой частью тонового диапазона. Левый ползунок называется слайдером чёрных точек, правый — слайдером белых точек, средний ползунок известен как гамма-слайдер, но обычно его называют слайдером среднего тона и используется, чтобы осветлить или затемнить средние тона:
Слайдер чёрных точек слева, слайдер белых точек справа и слайдер полутонов (гамма-слайдер) посередине
Давайте начнем изучение со слайдера чёрных точек. Этот ползунок используется для установки новой точки чёрного для изображения, но что это значит? Мы знаем, что левый край гистограммы показывает нам количество чёрных и близких к чёрному тону пикселей в изображении. Моя гистограмма говорит нам, что самые темные пиксели моего изображения, которые должны быть черными, на самом деле даже не близки к черному. У моей гистограммы очень большой разрыв между левым краем окна гистограммы и левым краем самого графика гистограммы, и это пустое пространство означает, что в изображении не хватает деталей в этих тонах:
Разрыв в левой части гистограммы означает, что в изображении не хватает чёрных и тёмных деталей.
Нам нужен способ закрыть этот пробел. Другими словами, мы должны взять самые тёмные пиксели моего изображения (которые на данный момент тёмно-средне-серые) и сделать самые тёмные их них чёрными, а более светлые затемнить. И делается это с помощью перемещения ползунка чёрных точек вправо, туда, где начинается левый край гистограммы:
Перемещение ползунка чёрных точек к левому краю гистограммы.
Вы заметите, что во время перемещения ползунка вправо, значение в поле ввода под ним возрастает, в моём случае, когда я добрался до левого края гистограммы, оно увеличилось с нуля до 39-ти. Это значит, что самые тёмные пиксели в моём изображении до начала корректировки были с уровнем яркости 39, следовательно, пиксели всех уровней яркости от 0 до 38-ми в изображении отсутствовали. Перемещая ползунок точки черного до уровня 39, что мы указываем Photoshop`у, чтобы он затемнил все пиксели изображения с уровнем яркости 39 до чисто чёрного (уровень яркости ноль). Это и есть то, что мы подразумеваем под фразой «установить новую черную точку»:
Черная точка была увеличена с 0 (по умолчанию) до уровня яркости 39.
Но Photoshop не ограничился только лишь затемнением пикселей уровня 39 до уровня 0. Он плавно затемнил (с помощью сложного нелинейного алгоритма) и другие, менее тёмные пиксели, затемнению подверглись пиксели уровня 39 до примерно 122 (средне-серого уровня), но не только затемнил, а сделал плавными переходы между уровнями яркости. Давайте посмотрим, что же произошло с моим градиентом после перемещения ползунка. Теперь градиент имеет чёрные и тёмно-серые цвета. Итак. благодаря простому перемещению ползунка, изображение получило недостающие тёмные оттенки:
После установки новой точки черного, левая сторона градиента теперь такая тёмная, как это и должно быть. Для сравнения с исходным изображением, наведите мышку на рисунок.
Настройка светлых тонов с помощью слайдера белой точки
Слайдер белых точек правой части окна гистограммы работает точно так же, за исключением того, что она позволяет нам установить новую белую точку для изображения. Моя гистограмма имеет большой разрыв между правым краем окна гистограммы и правым краем самой гистограммы, а теперь мы уже знаем, что это означает, что в изображении пропущено много деталей в светах. Самые яркие пиксели изображения даже близко не приближаются к чисто белому:
Разрыв справа от гистограммы означает, что в изображении не хватает ярких деталей.
Чтобы исправить это, всё, что нам нужно сделать, это переместить слайдер белых точек в начало правого края гистограммы:
Перемещение ползунка белой точки к правому краю гистограммы.
Во время перемещения ползунка влево значение в поле ввода под ним меняется в меньшую сторону. Изначально оно равно 255 (значение по умолчанию для белого), а к тому моменту, когда ползунок достиг правого края гистограммы, число уменьшилось до 235. Тут полная аналогия ситуации с тёмными пикселями — самые яркие пиксели в моем изображении не было светлее уровня 235, т.е пиксели уровней от 236 до 255 отсутствовали, а это значит , нам не хватало аж целых 20 светлых тональных значений! Перемещая ползунок точки белого до значения 235, мы указываем Photoshop`у, чтобы он все пиксели с первоначальным уровнем ярости 235 превратил в чисто белые, т.е. осветлил их до уровня 255. Это то, что называется «установка новой точки белого». Мы установили, чтобы любые пиксели уровня 235 и выше осветлились до чисто белого.
Если мы еще раз посмотрим на мой градиент, то увидим, что правая сторона теперь стала красивой и яркой. Photoshop взял все пиксели, которые изначально были на уровне 235 и сделал их белыми. И точно так же, как в случае с ползунком чёрных точек, он перераспределил другие тональные значения светлых пикселей в сторону осветления, сохраняя плавные переходы между уровнями. Простым перетаскиванием двух ползунков по направлению к краям гистограммы, мы скорректировали тоновый диапазон, повысив при этом контрастность Теперь блеклый и скучный серо-серый градиент превратился в красивый и яркий чёрно-белый:
После установки новой точки белого, правая сторона градиента теперь стала белой. Для сравнения с исходным изображением, наведите мышку на рисунок.
Регулировка полутонов с помощью гамма-слайдера
Весьма часто встречается ситуация, когда после установки новых чёрной и белой точек изображение выглядит либо слишком темным либо слишком светлым, кажется, что некоторые детали вымываются. Это происходит потому, что корректировка точек черного и белого, как правило, влияет на полутона в изображении. Чтобы это исправить, всё, что нам нужно сделать, это перетащить вправо или влево ползунок полутонов (серый ползунок в середине, также известный, как гамма-слайдер). В моём случае с градиентом, проблемы с полутонами не возникает, но мы всё же посмотрим на результаты его перемещений, чтобы получить представление о том, какой эффект ползунок полутонов оказывает на изображение.
Ползунок полутона столь же легко используется, как и два предыдущих слайдера, но работает он немного по-другому. В отличие от ползунков черных и белых точек, которые позволяют нам установить конкретные тональные значения для новых черных и белых точек (в моем случае 39 и 235), ползунок полутона не работает с фактическими тональными значениями. Это основная причина, почему многие пользователи Photoshop смущаются его применять. Давайте рассмотрим это подробнее.
Окно ввода, расположенное непосредственно под ползунком среднего тона, представляет его текущее значение. Обратите внимание на то, что его значение по умолчанию равно 1,00. Сразу чувствуется, что что-то здесь по-другому. Я имею виду десятичную запятую. Значения двух остальных ползунков не имеют запятой, да и как значения яркости могут иметь десятичную запятую?
Слайдер полутонов (гамма-слайдер) со значением по умолчанию 1,00.
У пользователей возникает вопрос, почему ползунок посередине имеет значение 1,00, ведь если он расположен между 0 и 255, значит и должен иметь значение что-то около 128. Отвечаю, да, это верно, но только в случае, если это значение представляет собой фактическое тональное значение. Но это не так. Цифры в поле ввода на самом деле являются не числом, а показателем степени, описывающей логарифмическую кривую. И вместо того, чтобы устанавливать конкретную тональное значение, как мы это делали с черной и белой точки, перемещение ползунка полутона регулирует то, что известно как гамма-кривая (поэтому техническое название ползунка среднего тона является гамма-слайдер).
Но для нас нет никакой необходимости вдаваться в эти математические дебри и детально изучать гамма-кривые. Всё, что нам действительно нужно знать, чтобы избежать путаницы — это то, что число в поле ввода среднего тона не отражает фактический уровень яркости.
Так как же его использовать? Для начала надо понять, что значение по умолчанию 1,00 не производит вообще никаких изменений яркости среднего тона. Любое значение выше 1,00 будет увеличивать яркость в полутонах. Чем выше значение, тем ярче они будут становиться. Любое значение ниже 1,00 будет затемнять средние тона. Чем меньше значение — тем темнее. Важно отметить, что ползунок полутонов не имеет никакого влияния на черную и белую точки. Он влияет только на яркость тонов между ними.
Для того, чтобы показать вам, что я имею в виду, ниже я представил небольшую анимированную картинку, где значение средних тонов изменяется с 0,5 до 1,50:
Вид изображение при изменении значения гамма-слайдера с 0,5 до 1,50.
В следующем материале мы рассмотрим применение «Уровней» на реальном примере.
Надежный алгоритм автоматического баланса белого с использованием точек серого цвета в изображениях
В этой диссертации рассматриваются три основные темы из области обработки изображений, то есть передача цвета, формирование изображений с расширенным динамическим диапазоном (HDR) и фильтрация изображений на основе указаний. Первая часть диссертации посвящена передаче цвета между входным и целевым изображениями. Передача цвета часто рассматривается как проблема передачи распределения, в которой распределения цвета изображения моделируются с использованием многомерного распределения Гаусса (MGD).Существующие преобразования цвета зависят от точности модели MGD и могут не дать правдоподобных результатов, если MGD недостаточно хорошо соответствует распределению цветов изображения. Чтобы преодолеть это ограничение, в этой диссертации мы применяем кластерные методы. Мы применяем модели гауссовой смеси для разделения входного и целевого изображений на гауссовские кластеры (каждый кластер следует за MGD). Кроме того, мы предлагаем четыре новых политики сопоставления для эффективного сопоставления целевых кластеров с входными кластерами.Наши результаты и оценка показывают значительное улучшение по сравнению с существующими методами передачи цвета. Передача цвета ограничивается передачей цвета между изображениями. Чтобы устранить это ограничение, мы используем свойства многомерного обобщенного гауссовского распределения (MGGD). MGGD может соответствовать широкому классу распределений характеристик изображения, включая распределения цвета, градиента, вейвлет-коэффициентов и т. Д. Мы предлагаем новое преобразование MGGD, которое мы применяем для одновременной передачи цвета и градиента.Предлагаемое преобразование MGGD оказывается полезным для других задач обработки изображений, таких как цветокоррекция. Несмотря на то, что MGGD и MGD являются непрерывными распределениями, их часто применяют для моделирования дискретных распределений цвета и света в изображениях. Наши эксперименты показали, что ограниченное бета-распределение обеспечивает гораздо более точную модель распределения цвета и света изображений. Чтобы использовать это свойство бета-распределения, мы предлагаем новый метод передачи цвета, в котором мы моделируем распределение цвета и света с помощью бета-распределения.С этой целью мы вводим новую трансформацию бета-распределения. Результаты, полученные с помощью нашего бета-преобразования, кажутся более естественными и менее насыщенными, чем результаты последних современных методов. Кроме того, наши результаты точно представляют целевую цветовую палитру и достоверно отображают целевой контраст. Различные методы передачи цвета часто приводят к разным выводимым изображениям. Процесс определения наиболее правдоподобного выходного изображения может быть субъективным, поскольку зависит от предпочтений человека.Чтобы снизить уровень субъективности при оценке качества передачи цвета, в этой диссертации мы предлагаем модель объективной оценки передачи цвета. Наша модель объясняет взаимосвязь между восприятием пользователей и рядом характеристик перцептивного изображения. Вторая часть этой диссертации посвящена визуализации HDR. Во-первых, мы представляем метод передачи цвета между изображениями HDR. С этой целью мы предлагаем расширение существующих методов передачи цвета на домен HDR. Во-вторых, мы представляем метод автоматического создания HDR-изображений только из двух изображений — flash и non-flash.Мы имитируем функцию отклика камеры с помощью функции яркости, чтобы получить ряд изображений с различной экспозицией, используя только изображение без вспышки. Затем мы восстанавливаем детали из флеш-изображения, используя наше новое преобразование хроматической адаптации (CAT), называемое билокальным CAT. Таким образом, мы эффективно восстанавливаем динамический диапазон реальной сцены без ущерба для качества HDR-изображения (поскольку наш метод устойчив к смещению). В контексте создания изображения HDR двухлокальный CAT восстанавливает детали изображения со вспышкой, удаляет тени и отражения от вспышки.В последней части этой диссертации мы используем потенциал двух локальных CAT для различных приложений редактирования изображений, таких как устранение шума, уменьшение размытости изображения, передача текстуры и т. Д. Мы предлагаем новый фильтр на основе руководств, в который мы встроили двухместная КПП. Предлагаемый фильтр работает так же хорошо (а для некоторых приложений даже лучше, чем) современные методы.
Преимущество автоматического обнаружения сетевой информации среди интернет-наркоманов: поведенческие и ERP-доказательства
Янг, К. С. Интернет-зависимость: появление нового клинического расстройства. Киберпсихологическое поведение. 1 , 237–244 (1998).
Артикул Google Scholar
Янг, К. С. Интернет-зависимость: симптомы, оценка и лечение. Инновации в клинической практике: справочник 17 , 19–31 (1999).
Google Scholar
He, J. B., Liu, C. J., Guo, Y. Y. & Zhao, L. Дефицит восприятия лица на ранней стадии у чрезмерно активных пользователей Интернета. Cyberpsychol Behav Soc Netw. 14 , 303–308 (2011).
Артикул PubMed Google Scholar
APA. Диагностическое и статистическое руководство по психическим расстройствам, 5-е изд. Вашингтон, округ Колумбия (2013).
Гриффитс, М. Д., Кусс, Д. Дж. И Деметровикс, З. Социальные сети Аддикция: обзор предварительных результатов [M] // Поведенческие зависимости. Elsevier Inc . 119–141 (2014).
Меткалф, О. и Паммер, К. Предвзятость в чрезмерно массовых многопользовательских ролевых онлайн-играх, использующих модифицированную задачу Stroop. Comput Hum Behav. 27 , 1942–1947 (2011).
Артикул Google Scholar
Ниу, Г. Ф. и др. . Тяга к Интернету среди интернет-наркоманов, вызванная сигналом. Поведение наркомана. 62 , 1–5 (2016).
Артикул PubMed Google Scholar
Zhang, Y. et al. . Активность мозга по отношению к сигналам, связанным с играми, при расстройстве интернет-игр во время выполнения задачи по наркомании. Фронт Психол . 7 , https://doi.org/10.3389/fpsyg.2016.00714 (2016).
Франкен, И. Х. А. Тяга к наркотикам и зависимость: интеграция психологического и нейропсихофармакологического подходов. Prog Neuro-Psychoph. 27 , 563–579 (2003).
Артикул Google Scholar
Холст, Р. Дж. и др. . Предвзятое внимание и расторможенность в отношении игровых сигналов связаны с проблемными играми у подростков мужского пола. J Здоровье подростков. 50 , 541–546 (2012).
Артикул Google Scholar
Дай, С., Ма, Q. и Ван, X. Предвзятое отношение к стимулам, связанным с зависимостью, у пациентов с интернет-зависимостью: исследование erp. J Psychol Sci. 34 , 1302–1307 (2011).
Google Scholar
Лу, Дж. и др. . Функциональное состояние мозга при создании музыки: исследование композиторов с помощью фМРТ. Научный сотрудник . 5 , https://doi.org/10.1038/srep12277 (2015).
Тиффани, С. Т. Когнитивная модель позывов к наркотикам и поведения, связанного с употреблением наркотиков: роль автоматических и неавтоматических процессов. Psychol Rev. 97 , 147–168 (1990).
Артикул PubMed CAS Google Scholar
Робинсон, Т. Э. и Берридж, К. С. Нейронная основа тяги к наркотикам: теория зависимости. Brain Res Rev. 18 , 247–291 (1993).
Артикул PubMed CAS Google Scholar
Робинсон, Т. Э.И Берридж, К. С. Психология и нейробиология зависимости: стимул-сенсибилизация. Наркомания. 95 , S91 – S117 (2000).
PubMed Google Scholar
Могг, К. и Брэдли, Б. П. Ориентация внимания на угрожающие выражения лица, представленные в условиях ограниченной осведомленности. Познание эмоций. 13 , 713–740 (1999).
Артикул Google Scholar
Могг, К. и Брэдли, Б. П. Избирательная ориентация внимания на замаскированные лица угроз при социальной тревоге. Behav Res Ther. 40 , 1403–1414 (2002).
Артикул PubMed Google Scholar
Брэдли, Б., Филд, М., Могг, К. и Де, Х. Дж. Внимание и оценочные предубеждения для сигналов о курении при никотиновой зависимости: составляющие процессы предубеждений в визуальной ориентации. Behav Pharmacol. 15 , 29–36 (2004).
Артикул PubMed CAS Google Scholar
Константину, Н. и др. . Предвзятость внимания, тормозящий контроль и острый стресс у нынешних и бывших наркоманов. Drug Alcohol Depen. 109 , 220–225 (2010).
Артикул Google Scholar
Нятянен, Р., Гайярд, А. В. и Мянтисало, С. Переосмысление раннего эффекта избирательного внимания на вызванный потенциал. Acta Psychol. 42 , 313–329 (1978).
Артикул Google Scholar
Нятянен, Р., Куяла, Т. и Винклер, И. Слуховая обработка, ведущая к сознательному восприятию: уникальное окно для центральной слуховой обработки, открываемое негативностью несоответствия и соответствующими реакциями. Психофизилогия. 48 , 4–22 (2011).
Артикул Google Scholar
Циглер И., Балаж Л. и Винклер И. Обнаружение не относящихся к задаче визуальных изменений на основе памяти. Психофизиология. 39 , 869–873 (2002).
Артикул PubMed Google Scholar
He, J. B. et al. . Различные эффекты алкоголя на автоматическое определение цвета, местоположения и изменения времени: исследование отрицательного несоответствия. J Psychopharmacol. 28 , 1109–1114 (2014).
Артикул PubMed CAS Google Scholar
Кимура, М., Катаяма, Дж. И., Охира, Х. и Шрёгер, Э. Отрицательность визуального несоответствия: новые доказательства из равновероятной парадигмы. Психофизиология. 46 , 402–409 (2009).
Артикул PubMed Google Scholar
Аменедо, Э., Пазо-Альварес, П. и Кадавейра, Ф. Вертикальные асимметрии при предварительном обнаружении изменений направления движения. Int J Psychophysiol. 64 , 184–189 (2007).
Артикул PubMed Google Scholar
Müller, D. et al. . Визуальные репрезентации объектов могут формироваться вне фокуса произвольного внимания: свидетельства из связанных с событиями потенциалов мозга. J Cognitive Neurosci. 22 , 1179–1188 (2010).
Артикул Google Scholar
Li, X. et al. . Негативность визуального несоответствия, вызванная выражением лица: новое свидетельство равновероятной парадигмы. Behav Brain Funct . 8 , https://doi.org/10.1186/1744-9081-8-7 (2012).
Ван В., Мяо Д. и Чжао Л. Автоматическое определение изменения ориентации лиц по сравнению с объектами, не являющимися лицами: визуальное исследование ммн. Biol Psychol. 100 , 71–78 (2014).
Артикул PubMed Google Scholar
Стефаникс, Г. и Циглер, И. Автоматические реакции на ошибки предсказания для рук с неожиданной латеральностью: электрофизиологическое исследование. Нейроизображение. 63 , 253–261 (2012).
Артикул PubMed Google Scholar
Кецскес-Ковач, С. И. и Циглер, И. Пол лиц определяется автоматически: исследование негативного визуального несоответствия. Front Hum Neurosci. 7 , 523–533 (2013).
Артикул Google Scholar
Фаркас, К., Стефаникс, Г., Мароши, К. и Чукли, Г. Элементарный сенсорный дефицит при шизофрении, индексируемый нарушенным отрицательным зрительным несоответствием. Schizophr Res. 166 , 164–170 (2015).
Артикул PubMed Google Scholar
Neuhaus, A.H. Доказательства ошибки предсказания нарушения зрения при шизофрении. Schizophr Res. 147 , 326–330 (2013).
Артикул PubMed Google Scholar
Maekawa, T. et al. . Измененные системы обработки зрительной информации при биполярном расстройстве: данные визуального MMN и P3. Передний человек Neurosci . 7 , https://doi.org/10.3389/fnhum.2013.00403 (2013).
Qiu, X. et al. . Нарушение обработки зрительной информации на этапе предварительного внимания у пациентов с большим депрессивным расстройством: исследование негативности визуального несоответствия. Neurosci Lett. 491 , 53–57 (2011).
Артикул PubMed CAS Google Scholar
Чанг, Ю., Сюй, Дж., Ши, Н., Чжан, Б. и Чжао, Л. Дисфункция обработки не относящихся к задаче эмоциональных лиц у пациентов с большим депрессивным расстройством, выявленная с помощью визуальных MMN, связанных с выражением лица. . Neurosci Lett. 472 , 33–37 (2010).
Артикул PubMed CAS Google Scholar
Хосак, Л., Кремлачек, Дж., Куба, М., Либигер, Дж. И Цизек, Дж. Отрицательность несоответствия в зависимости от метамфетамина: пилотное исследование. Acta Neurobiol Exp. 68 , 97–102 (2008).
Google Scholar
Kremláček, J. et al. . Отрицательность визуального несоответствия (vMMN): обзор и метаанализ исследований психиатрических и неврологических расстройств. Cortex. 80 , 76–112 (2016).
Артикул PubMed Google Scholar
Yang, X. et al. . Гендерные различия в обнаружении изменений с предварительным вниманием для визуальных, но не слуховых стимулов. Clin Neurophysilo. 127 , 431–441 (2016).
Артикул Google Scholar
Ван, X. Д., Ву, Ю. Ю., Лю, А. и Ван, П. Пространственно-временная динамика автоматической обработки фонологической информации в визуальных словах. Научный сотрудник . 3 , https://doi.org/10.1038/srep03485 (2013).
Могг, К., Брэдли, Б. П. и Хэллоуэлл, Н. Предвзятое отношение к угрозе: роль характерной тревожности, стрессовых событий и осведомленности. Q J Exp Psychol. 47 , 841–864 (1994).
Артикул CAS Google Scholar
Ян, Х. и др. . Предсознательное смещение внимания у курильщиков сигарет: исследование модуляции осознания смещения внимания. Addict Biol. 14 , 478–88 (2009).
Артикул PubMed Google Scholar
Ноэль, Х. и др. . Динамика внимания к сигналам об алкоголе у абстинентных алкоголиков: роль первоначального ориентирования. Alcohol Clin Exp Res. 30 , 1871–1877 (2006).
Артикул PubMed Google Scholar
Лёбер, С. и др. . Клиническое исследование: смещение внимания у пациентов с алкогольной зависимостью: роль хронического характера и исполнительного функционирования. Addict Biol. 14 , 194–203 (2009).
Артикул PubMed Google Scholar
Vollstädtklein, S., Loeber, S., Von, G.C., Mann, K. & Kiefer, F. Избегание связанных с алкоголем стимулов усиливается на ранней стадии воздержания у пациентов с алкогольной зависимостью. Алкоголь Алкоголизм. 44 , 458–463 (2009).
Артикул Google Scholar
Чиккарелли М., Нигро Г., Гриффитс М. Д., Козенца М. и Д’Олимпио Ф. Предвзятость внимания у проблемных и непроблемных игроков. J Аффектные расстройства. 198 , 135–141 (2016).
Артикул PubMed Google Scholar
Россе, Р.Б. и др. . Предотвращающие и внимательные движения глаз во время визуального сканирования кокаинового сигнала: корреляция с интенсивностью тяги к кокаину. J Neuropsych Clin N. 9 , 91–94 (1997).
Артикул CAS Google Scholar
Себаллос, Н. А., Комогорцев, О. В. и Тернер, Г. М. Глазная визуализация смещения внимания у студентов колледжа: автоматическая и контролируемая обработка сцен, связанных с алкоголем. J Stud Алкогольные наркотики. 70 , 652–659 (2009).
Артикул PubMed Google Scholar
Duijvenbode, N. V. et al. . Предвзятость внимания у проблемных пьющих с легкой или пограничной умственной отсталостью и без нее. J Интеллект Disabil Res. 61 , 255–265 (2017).
Артикул PubMed Google Scholar
Кастелланос, Э. Х. и др. . У взрослых с ожирением визуальная предвзятость внимания к изображениям пищевого ориентира: свидетельство изменения функции системы вознаграждения. Int J Obesity. 33 , 1063–1073 (2009).
Артикул CAS Google Scholar
Werthmann, J. et al. . Не могу (не) оторвать глаз: предвзятость внимания к еде у участников с избыточным весом. Health Psychol. 30 , 561–569 (2011).
Артикул PubMed Google Scholar
Brevers, D. et al. . Динамика предвзятости внимания к информации об азартных играх в проблемной игре. Психологическое поведение наркомана. 25 , 675–682 (2011).
Артикул PubMed PubMed Central Google Scholar
Zhao, H. et al. . Свидетельство движения глаз о предвзятости внимания к сигналам, связанным с употреблением психоактивных веществ, у героин-зависимых лиц, получающих поддерживающую терапию метадоном. Неправильное использование субстанции. 52 , 527–534 (2017).
Артикул PubMed Google Scholar
Филд, М. и Кокс, У. М. Предвзятость внимания в аддиктивном поведении: обзор его развития, причин и последствий. Drug Alcohol Depen. 97 , 1–20 (2008).
Артикул Google Scholar
Petit, G. et al. .Ранняя модуляция внимания с помощью сигналов, связанных с алкоголем, у молодых пьяниц: исследование потенциала, связанного с событием. Clin Neurophysiol. 123 , 925–936 (2012).
Артикул PubMed Google Scholar
Versace, F. et al. . Реактивность мозга курильщиков на эмоциональные, нейтральные и связанные с сигаретой стимулы. Addict Biol. 16 , 296–307 (2011).
Артикул PubMed Google Scholar
Асмаро, Д., Кэролан, П. Л. и Лиотти, М. Электрофизиологические доказательства раннего смещения внимания к изображениям, связанным с наркотиками, у хронических потребителей каннабиса. Поведение наркомана. 39 , 114–121 (2014).
Артикул PubMed Google Scholar
Nijs, I. M., Franken, I. H. & Muris, P. Вмешательство Струпа, связанное с питанием, у лиц с ожирением и нормальным весом: поведенческие и электрофизиологические индексы. Ешьте поведение. 11 , 258–265 (2010).
Артикул PubMed Google Scholar
D’Hondt, F. & Maurage, P. Электрофизиологические исследования интернет-зависимости: обзор в рамках двойного процесса. Поведение наркомана. 64 , 321–327 (2017).
Артикул PubMed Google Scholar
Робинсон Т.Э. и Берридж, К. С. Теория сенсибилизации стимулов наркомании: некоторые текущие вопросы. Филос Т Рой Соц Б. 363 , 3137–3146 (2008).
Артикул Google Scholar
Балкони, М., Вентурелла, И., и Финоккиаро, Р. Данные системы вознаграждения, FRN и влияние P300 на интернет-зависимость у молодых людей. Brain Sci . 7 , https://doi.org/10.3390/brainsci7070081 (2017).
Ко, К. Х. Мозговые корреляты тяги к онлайн-играм под воздействием реплики у субъектов с зависимостью от Интернет-игр и у пациентов с ремиссией. ADDICT BIOL. 18 , 559–569 (2011).
Артикул PubMed Google Scholar
Sun, Y. et al. . ФМРТ-исследование влечения, вызванного изображениями-подсказками, у наркоманов онлайн-игр (подростки мужского пола). Behav Brain Res. 233 , 563–576 (2012).
Артикул PubMed Google Scholar
Yuan, K. et al. . Нарушения толщины коры головного мозга в позднем подростковом возрасте с зависимостью от онлайн-игр. Плос ОДИН . 8 , https://doi.org/10.1371/journal.pone.0053055 (2013).
Weng, C. et al. . Аномалии серого и белого вещества при зависимости от онлайн-игр. Eur J Radiol. 82 , 1308–1312 (2013).
Артикул PubMed Google Scholar
Jin, C. et al. . Аномальная префронтальная кора в состоянии покоя, функциональная связность и тяжесть расстройства интернет-игр. Brain Imaging Behav. 3 , 719–729 (2016).
Артикул Google Scholar
Jeromin, F., Nyenhuis, N.И Барк, А. Предвзятость чрезмерного внимания интернет-геймеров: экспериментальные исследования с использованием Струпа наркомании и визуального зонда. J Behav Addict. 5 , 32–40 (2016).
Артикул PubMed PubMed Central Google Scholar
Кенеманс, Дж. Л., Хебли, В., Ван ден Хеувел, Э. Х. М. и Грент-Т-Йонг, Т. Умеренное употребление алкоголя нарушает механизм обнаружения редких событий в зрительной коре головного мозга человека. J Psychopharmacol. 24 , 839–845 (2010).
Артикул PubMed CAS Google Scholar
Ван, Дж. Дж., Би, Х. Й., Гао, Л. К. и Уайделл, Т. Н. Зрительный магноклеточный путь у китайскоязычных детей с дислексией развития. Neuropsychologia. 48 , 3627–3633 (2010).
Артикул PubMed Google Scholar
Цзяо, К., Ван, Т., Пэн, X., и Цуй, Ф. Нарушение обработки эмпатии у людей с расстройством интернет-зависимости: потенциальное исследование, связанное с событием. Front Hum Neurosci , 11 , https://doi.org/10.3389/fnhum.2017 (2017).
Cheetham, A., Allen, N. B., Yücel, M. & Lubman, D. I. Роль аффективной дисрегуляции в наркомании. Clin Psychol Rev. 30 , 621–634 (2010).
Артикул PubMed Google Scholar
Ким, С. Х. Снижение дофаминовых рецепторов D2 в полосатом теле у людей с интернет-зависимостью. Нейроотчет. 22 , 407–411 (2011).
Артикул PubMed CAS Google Scholar
Tian, M. et al. . ПЭТ-визуализация выявляет функциональные изменения мозга при расстройстве, связанном с интернет-играми. евро J Nucl Med Mol Imaging. 41 , 1388–1397 (2014).
Артикул PubMed Google Scholar
Zhang, Y. et al. . Изменения связности мозга в трех субрегионах передней поясной коры у героинзависимых лиц: данные фМРТ в состоянии покоя. Неврология. 284C , 998–1010 (2015).
Артикул CAS Google Scholar
Вальдес П. и Мехрабиан А. Влияние цвета на эмоции. J Exp Psychol Gen. 123 , 394–409 (1994).
Артикул PubMed CAS Google Scholar
Уилсон, Г. Д. Пробуждающие свойства красного по сравнению с зеленым. Навык восприятия и моторики. 23 , 947–949 (1966).
Артикул Google Scholar
Болдуин, М. В. и Менье, Дж. Активация реляционных схем привязки с помощью команды. Soc Cognition. 17 , 209–227 (1999).
Артикул Google Scholar
Гао С. Реакция цветового зрения на пространственную частоту и распознавание образов. J Юго-Восточный университет. 25 , 36–40 (1995).
MathSciNet ОБЪЯВЛЕНИЯ Google Scholar
Чжао, X. М., Тэн, П. К. и Цзун, Дж. Г. Исследование визуальной дискриминации человеческого глаза по разнице в цвете. Electron Sci & Technol. 1 , 303–307 (2014).
Google Scholar
Хуанг, X. Т., Хуанг, В. и Ли, X. R. Символическое значение цветов для китайцев. J Psychol Sci. 6 , 1–7 (1991).
ADS Google Scholar
Стефаникс Г., Чукли Г., Комлози С., Чобор П. и Циглер И. Обработка оставленных без внимания эмоций на лице: исследование негативности визуального несоответствия. Нейроизображение. 59 , 3042–3049 (2012).
Артикул PubMed Google Scholar
Семлич, Х. В., Андерер, П., Шустер, П. и Пресслих, О. Решение для надежного и достоверного уменьшения глазных артефактов, примененное к P300 ERP. Психофизилогия. 23 , 695–703 (1986).
Артикул CAS Google Scholar
Циглер И. Негативность визуального несоответствия и категоризация. Brain Topogr. 27 , 590–598 (2014).
Артикул PubMed Google Scholar
На пути к автоматическому обнаружению асимметрии формы поражения кожи, пестроты цвета и диаметра на дерматоскопических изображениях
1. «Консенсусная конференция NIH: Диагностика и лечение ранней меланомы», JAMA, том 268, 1993.
2. M Хинц-Мадсен, «Вероятностная основа для классификации дерматоскопических изображений», докторская диссертация, Технический университет Дании, 1998.
4. Stoecker W.V., Li W.W. и Moss R.H., «Автоматическое обнаружение асимметрии в опухолях кожи», Computerized Med. Представь. График, том 16, № 3, стр. 191–197, май 1992 г. 10.1016 / 0895-6111 (92) -I [PubMed] [CrossRef] [Google Scholar] 5. Нахбар Ф., Штольц В., Меркл Т., Коннетта А.Б., Фогт Т., Ландталер М. и др. «Правило дерматоскопии abcd», Журнал Американской академии дерматологии, 30 (4): 551– 559, 1994. 10.1016 / S0190-9622 (94) 70061-3 [PubMed] [CrossRef] [Google Scholar] 6. Невилл Б., Дамм Д., Аллен С. и Чи А., «Патология полости рта и челюстно-лицевой области», Elsevier; Канада, 4-е издание, 2015 г. [Google Scholar] 7. Браун Р., Рабиновиц Х., Оливьеро М. и др., «Дерматоскопия пигментных поражений кожи», Журнал Американской академии дерматологии, том 52, стр.109–121, 2005. 10.1016 / j.jaad.2001.11.001 [PubMed] [CrossRef] [Google Scholar]8. В. Нг и Д. Чунг, «Измерение асимметрии кожных поражений», В: Proc. IEEE Int. Конф. системы, человек и кибернетика (SMC), т. 5. Пискатауэй, Нью-Джерси: IEEE Press; стр.4211-6, 1997.
9. Нг В., Фунг Б. и Ли Т., «Определение асимметрии поражения кожи с нечеткими границами», Comput. Биол. Med. 35, 103–120. 2005 г. 10.1016 / j.compbiomed.2003.11.004 [PubMed] [CrossRef] [Google Scholar] 10. Сейденари С., Пеллакани Г. и Джаннетти А., «Цифровая видеомикроскопия и анализ изображений с автоматической классификацией для обнаружения тонких меланом», Исследование меланомы, том 9, стр.163–171, 1999. 10.1097 / 00008390-19912. М. Амико, М. Ферри, И. Станганелли, «Качественная мера асимметрии для обнаружения меланомы», In Proc. IEEE Int. Symp. Биомед. Изображение: Nano Macro, vol.2, pp.1155–1158, 2004.
13. Л. Ма, А. Го, С. Цзоу и В. Сюй, «Анализ нерегулярности и асимметрии кожных поражений на основе нескольких -масштабные локальные фрактальные распределения », 2-й Международный конгресс по обработке изображений и сигналов, 2009 г.
14. К. Клоусон, П. Морроу, Б. Скотни, Д. Маккенна и О. Долан, «Определение оптимальных осей для количественной оценки асимметрии поражения кожи», В Международной конференции IEEE по обработке изображений (ICIP 2007), том .2, pp.453-456, 2007.
15. Дайс Р., «Меры степени экологической ассоциации между видами», Экология. 26 (3): 297–302, 1945. 10.2307 / 1932409 [CrossRef] [Google Scholar] 16. Калва У., Легнер К., Конг Т. и Пандей С., «Диагностика рака кожи с помощью комплексного приложения для смартфонов», Симметрия, 11 (6), 2019.10.3390 / sym11060790 [CrossRef] [Google Scholar] 17. Tenenhaus A., Nkengne A., Horn J., Serruys C., Giron A. и Fertil B., «Обнаружение меланомы на дерматоскопических изображениях невусов, полученных в неконтролируемых условиях», Skin Research and Technology, 16 (1): 85–97, 2010. 10.1111 / j.1600-0846.2009.00385.x [PubMed] [CrossRef] [Google Scholar] 18. Umbaugh S., Moss R. и Stoecker W., «Автоматическая цветовая сегментация изображений с приложениями для обнаружения пестрой окраски в опухолях кожи», IEEE Eng Med.Биол. 8, 43–52, 1989. 10.1109 / 51.45955 [PubMed] [CrossRef] [Google Scholar] 19. Касми Р. и Мокрани К., «Классификация злокачественной меланомы и доброкачественных поражений кожи: реализация автоматического правила ABCD», IET Image Proc. 10 (6), 448–455, 2016. 10.1049 / iet-ipr.2015.0385 [CrossRef] [Google Scholar]20. Г. Грамматикопулос, А. Хатцигайдас, А. Папастергю, П. Лазаридис, З. Захарис, Д. Кампитаки и др. «Автоматическое обнаружение злокачественной меланомы с использованием Матлаб, Тр. Пятый Int. Конф. по сетям передачи данных, коммуникациям и компьютерам, Бухарест, Румыния, 2006 г.
21. Seidenari S., Fabiano A., Jalbout Al S., Bassoli S., Borsari S., Magnoni C., et al., «Взаимосвязь между гистологической и компьютерной оценкой диаметра и толщины меланомы в голове по сравнению с меланомой туловища и конечностей». , ”Head Neck Oncol. 06; 5 (3): 32, 2013. [Google Scholar] 22. Грамматикопулос Г., Хатзигаидас А., Папастергю А. и др., «Простой инструмент Matlab для автоматизированной диагностики злокачественной меланомы», WSEAS Trans. по информатике и приложениям, т. 3, вып. 4. С. 460–465, 2007.[Google Scholar] 23. Гарнави Р., Алдин М. и Бейли Дж. «Компьютерная диагностика меланомы с использованием анализа текстуры на основе границ и вейвлетов», В: IEEE Trans. Инф. Technol. Биомед., Т. 16, нет. 6, 2012. 10.1109 / TITB.2012.2212282 [PubMed] [CrossRef] [Google Scholar] 24. Закут И., «Диагностика кожных поражений на основе дерматоскопических изображений с использованием методов обработки изображений», In International Journal of Signal Processing, Image Processing and Pattern Recognition, 9 (9): 189–204, 2016. [Google Scholar] 25.Али А., Ли Дж., Ян Г. и О’Ши С.Дж., «Подход машинного обучения к автоматическому определению неровностей границы поражения кожи с помощью дерматоскопических изображений», PeerJ Computer Science, 2020. [Google Scholar]26. Н. Оцу, «Метод выбора порога из гистограммы уровней серого», IEEE Trans. Syst. Человек Cybern., Т. 9, pp. 62–66, Jan. 1979.
27. J.M. Sung, H.G. Ha, B.Y. Чой, Ю. Ха, «Пороговая обработка изображения на основе стандартного отклонения внутри класса с использованием стандартного отклонения», In Proceedings of SPIE — International Society for Optical Engineering, 2014.
28. Кон Б. А., «Принимая во внимание букву E в мнемонике меланомы ABCDE», Arch Dermatol 142: 528–529, 2006. 10.1001 / archderm.142.4.528-б [PubMed] [CrossRef] [Google Scholar] 29. Ван Дж., Цзян Х., Юань З., Ченг М.-М., Ху Х. и Чжэн Н., «Обнаружение заметных объектов: подход интеграции региональных особенностей», Int. J. Comput. Видение, т. 123, нет. 2. С. 251–268, 2017. 10.1007 / s11263-016-0977-3 [CrossRef] [Google Scholar] 30. Джаханифар М., Замани Таджеддин Н., Мохаммадзаде Асл Б.и Гуйя А., «Сегментация поражений на дерматоскопических изображениях на основе контролируемой карты значимости», IEEE Journal of Biomedical and Health Informatics, 2018. [PubMed] [Google Scholar] 31. Сунь Ю., Лю М., Мэн М.К.Х., «Активное восприятие для сегментации переднего плана: метод моделирования фона на основе данных RGB-D», IEEE Trans Autom Sci Eng., 2019. 10.1109 / TASE.2019.2893414 [CrossRef] [Google Scholar] 32. Чен К., Ли Д. и Тан К., «Матирование KNN», транзакции IEEE по анализу шаблонов и машинному интеллекту. 35, 9, с.2175–2188, 2013. 10.1109 / TPAMI.2013.18 [PubMed] [CrossRef] [Google Scholar] 33. П. Чандл, К. Розендаль и Х. Киттлер, «Набор данных ham10000, большая коллекция дерматоскопических изображений из нескольких источников распространенных пигментных поражений кожи», препринт arXiv arXiv: 1803.10417, 2018. [Бесплатная статья PMC] [PubMed] 34. Коделла Н., Гутман Д., Эмре Челеби М., Хельба Б., Маркетти М., Дуза С. и др. «Анализ кожных повреждений для выявления меланомы: задача на международном симпозиуме 2017 года по биомедицинской визуализации (isbi) , », Организованный международным сотрудничеством по визуализации кожи (isic).arXiv: 1710.05006, 2017. [Google Scholar] 35. Сетхи И.К. Энтропийные сети: от деревьев решений к нейронным сетям // Тр. IEEE 78 (10), 1605–1613, 1990. 10.1109 / 5.58346 [CrossRef] [Google Scholar] 36. Брейман Л., Фридман Дж. Х., Ольшен Р. А. и Стоун К. Дж., «Деревья классификации и регрессии», Wadsworth Inc., 1984. [Google Scholar] 37. Лоу Д. Г., «Отличительные особенности изображения от масштабно-инвариантных ключевых точек», IJCV, 60 (2): 91–110, 2004. 10.1023 / B: VISI.0000029664.99615.94 [CrossRef] [Google Scholar]38.Блумберг Д. Копек и Л. Дасари, «Измерение перекоса и ориентации изображения документа», Document Recognition II (SPIE vol. 2422), Сан-Хосе, Калифорния, 6-7 февраля, 302-316, 1995.
39. Ху М.К., «Распознавание визуальных образов с помощью инвариантов моментов», IRE Transactions on Information Theory 8, 179–187, 1962. 10.1109 / TIT.1962.1057692 [CrossRef] [Google Scholar] 40. Ли К., «Контентный анализ микроскопических изображений», Logos Verlag, 2016. [Google Scholar]41. C.I.E., «Рекомендации по единообразным цветовым пространствам, уравнениям цветового различия, психометрическим параметрам цвета», Дополнение №2 к публикации CIE № 15 (E.-1.3.1) 1971 / (TC-1.3.), 1978.
42. Себастьен Г.С., «Процессы принятия решений при распознавании образов», Нью-Йорк: Макмиллан, 1962. [Google Scholar]43. Дж. Маккуин, «Некоторые методы классификации и анализа многомерных наблюдений», В LM Le Cam & J. Neyman (Ред.), Труды пятого симпозиума в Беркли по математической статистике и вероятности (Том 1, стр. 281-297). Беркли, Калифорния: Калифорнийский университет Press, 1967.
44.П. Дж. Гроенен, У. Каймак и Дж. Ван Росмален, «Нечеткая кластеризация с функциями расстояния Минковского», In Advances in Fuzzy Clustering and its Applications (eds J. Valente de Oliveira and W. Pedrycz), 2007.
45. Бутенко С., Чаовалитвонгсе В. и Пардалос П., «Проблемы кластеризации в биологических сетях», World Scientific, 2009. [Google Scholar]46. Л. Р. Ферет, «Доц. Междунар. pour l‘Essai des Mat., Цюрих, 2, группа D., 1931.
47. W.H. Уолтон, «Статистический диаметр Ферета как мера размера частиц», Nature, Лондон, 162, 329–330, 1948.
48. Роннебергер О., Фишер Ф. и Брокс Т., «U-net: сверточные сети для сегментации биомедицинских изображений», MICCAI, 2015. [Google Scholar]49. А. Али, Дж. Ли, С. О’Ши , Дж. Янг, Т. Траппенберг и X. Йе, «Подход на основе глубокого обучения к извлечению границ кожных повреждений с новым детектором краев в дерматоскопических изображениях», Международная объединенная конференция по нейронным сетям, 2019.
50. A . Али, Дж. Ли и Т. Траппенберг, «Контролируемые и неконтролируемые методы на основе глубокого обучения для сегментации кожных повреждений в дерматоскопических изображениях», Канадская конференция по искусственному интеллекту, страницы 373–379, 2019.
Дистанционное зондирование | Бесплатный полнотекстовый | Автоматическое обнаружение и сегментация колонн в построенных зданиях из облаков точек
1. Введение
За более чем два десятилетия реконструкция зданий в 3D стала активной темой исследований в сообществах дистанционного зондирования, фотограмметрии и компьютерного зрения [1,2,3 ]. Эта тенденция продолжилась из-за растущего спроса на обновленные, точные и автоматически производимые модели [4]. Хотя было разработано несколько методологий для автоматической реконструкции интерьера и оболочки здания на основе облаков точек и / или изображений, большинство из них ориентировано на реконструкцию уже завершенных зданий, в то время как строящимся зданиям уделяется не так много внимания.Систематическая оценка размеров и качества строительных компонентов на ранней стадии процесса строительства имеет важное значение для успешного завершения процесса строительства в отведенные сроки, что позволяет сократить расходы. Прямые затраты на переделку в строительной отрасли составляют примерно 5% от общих затрат на строительство [5]. В настоящее время методы анализа размеров строительных компонентов в основном основаны на использовании инструментов дистанционного зондирования, таких как тахеометры.Хотя они очень точны, их использование отнимает много времени и подвержено ошибкам оператора и, следовательно, непрактично в больших масштабах [6]. Наземные лазерные сканеры (TLS) привлекают все большее внимание для сбора и анализа трехмерных данных о состоянии строительства крупномасштабных гражданских инфраструктур либо на этапе строительства, либо на этапе ввода в эксплуатацию, либо на этапе эксплуатации [ 7]. Геометрический сбор данных с помощью устройств TLS выполняется быстро, а облака точек имеют относительно высокое качество с точки зрения точности, точности и разрешения [8].Своевременный сбор и анализ данных необходимы для активного мониторинга производства на этапе строительства проекта и для автоматического трехмерного макета построенных объектов. В этом контексте производственный мониторинг позволяет сравнивать состояние исполнения проекта с состоянием исполнения, определенным в договорном соглашении. Важность производственного мониторинга заключается в его удобстве для предоставления полной информации об объекте и обновленной планировке, для отслеживания изменений, основанных на решениях во время строительства, и для регистрации отклонений от решений, которые являются пределами технических характеристик объекта. устройство сбора данных и ошибки регистрации, если требуется более одной позиции сканирования [7].Хотя наземные лазерные сканеры получают точные и производительные геометрические данные, облака точек состоят из массивной и необработанной информации, которую необходимо обработать для извлечения информации, полезной для приложений, для обслуживания которых они предназначены. Например, облако точек, состоящее из нескольких тысяч частичных трехмерных облаков точек, которые описывают здание на ранней стадии строительства, бесполезно, хотя геометрическое положение построенных колонн и балок, их поперечные сечения и / или их высота известны, учитывая, что эти аспекты представляют интерес для мониторинга строительства.Следовательно, существует возрастающая потребность в автоматической обработке данных 3D-сканирования, полученных с помощью лазера, и, в частности, в сравнении этих данных с запланированными работами. В последние годы были предприняты активные усилия по облегчению автоматической обработки данных трехмерного лазерного сканирования. Хотя большинство подходов нацелено на реконструкцию уже построенных элементов, контроль качества и мониторинг требуют дополнительных функций [9]. Например, в области контроля качества и мониторинга недавно были применены 3D-лазерные сканеры для структурного мониторинга плотин [10]; для отслеживания механических, электрических и сантехнических компонентов (MEP), таких как воздуховоды, трубы и кабелепроводы [11]; для контроля плоскостности плиты [12]; и к выполнению оценки качества размеров сборных железобетонных элементов [13].Целью данной работы является обнаружение и сегментирование колонн круглого и прямоугольного сечения в зданиях. Обнаружение цилиндров в облаках точек широко изучалось из-за их важности и широкого присутствия в городской среде (например, фонарные столбы) или в промышленной инфраструктуре (например, воздуховоды, трубопроводы, трубы).
Лари и Хабиб [14] представили подробный обзор методов сегментации цилиндрических признаков, разделив их на три категории: пространственная область, область параметров и гибридные методы.Первая категория включает подходы к наращиванию области, которые в основном основаны на геометрических свойствах отдельных лазерных точек с помощью анализа главных компонентов локальной окрестности [15]. В методах пространственной области качество результатов зависит от качества исходных значений параметров и, следовательно, зависит от качества данных [14]. В связи с этим проблема шума в процедурах наращивания области была недавно решена путем внедрения робастного анализа главных компонент (RPCA) для вычисления точечных нормалей [16], использования статистических методов для обнаружения выбросов и оценки кривизны [17] или принятия максимум распределения возможных нормалей из изображения, созданного путем заполнения аккумулятора преобразования Хафа [18], что приводит к уменьшению избыточной сегментации, присутствующей в процедурах выращивания других областей.Другие характеристики, такие как плотность проецируемых точек, собственные значения точек и интенсивность, также использовались для обнаружения цилиндрических вертикальных элементов, таких как столбы или деревья в городских сценах [19,20,21]. Эти стратегии сегментации включают восстановление локальной окрестности для каждой трехмерной точки и извлечение различных объектов с последующим процессом классификации. Weinmann et al. [22] представили недавний обзор этих методов, в основном применяемых к городским сценам, в которых данные собираются с мобильного лазерного сканера, что приводит к высококачественным наборам данных с точки зрения полноты данных.В категории области параметров методы основаны на поиске предопределенных параметрических форм. Параметры первоначально оцениваются по локальной окрестности каждой точки, а обнаружение основывается на поиске пиков в пространстве атрибутов. Эти методы считаются медленными по сравнению с методами пространственной области, особенно если количество задействованных параметров велико, но они более устойчивы к наличию помех и засорений [23]. Преобразование Хафа — подход, принадлежащий к этой категории. Цилиндр определяется пятью параметрами, поэтому прямое использование преобразования Хафа нецелесообразно [24].Альтернативы прямому использованию преобразования Хафа были предложены в последние годы для извлечения цилиндров из облаков точек. Например, трубы были обнаружены в ортогональных срезах облаков точек с помощью двухмерного преобразования Хафа [25,26]. Эта методология также использовалась в отношении обнаружения столбцов круглого поперечного сечения [27], хотя методология апробирована в условиях полноты данных. Раббани и ван ден Хеувел [24] ввели последовательное двухэтапное преобразование Хафа, согласованное при первом определении направления оси цилиндра (2D-преобразование Хафа), а затем получении радиуса и позы (3D-преобразование Хафа).Наконец, третья категория, предложенная Лари и Хабибом [14], включает гибридные методы, такие как консенсус случайной выборки (RANSAC), в котором признаки классифицируются в области параметров и подгоняются в пространственной области [28]. Что касается элементов прямоугольной призмы. , большинство усилий было сосредоточено на восстановлении только видимых плоских поверхностей, из которых они составлены. Например, внутренние стены были широко признаны и моделировались поверхностными методами [29,30,31,32], тогда как было разработано лишь несколько подходов на основе объема [33,34].Методы подгонки объемных примитивов к данным более восприимчивы к неточности и неполноте данных. В то время как подходы пространственной области напрямую извлекают признаки из данных, подходы области параметров используют предыдущие знания для поиска наиболее подходящей модели. Этот факт делает подходы, основанные на параметрах, более устойчивыми при наличии частичной окклюзии [23].Основная цель этой работы — разработать методологию обнаружения и сегментации колонн круглого и прямоугольного поперечного сечения в зданиях.Конкретные цели документа связаны с надежностью методологии при различных уровнях беспорядка, непрозрачности и полноты данных, которые обычно присутствуют при строительстве в помещении. С одной стороны, полнота облака точек зависит от позиций сканирования, из которых собираются данные, которые определяются в соответствии со сложностью формы и занимаемыми частями внутреннего здания. С другой стороны, внутренние сцены обычно представляют собой заглушенную и загроможденную среду как на этапе строительства, так и на этапе использования из-за присутствия других объектов, таких как вспомогательные строительные элементы и мебель, соответственно.Предлагаемая методология основана на модельных методах, таких как преобразование Хафа и обобщенное преобразование Хафа. Эти методы надежны при частичной окклюзии, потому что они включают знание формы объекта, который нужно распознать.
Работа организована следующим образом. Раздел 2 описывает методику, разработанную для реконструкции колонн круглого и прямоугольного сечения. Раздел 3 посвящен результатам и обсуждениям, извлеченным из применения методологии к двум тематическим исследованиям при разных уровнях полноты данных.Наконец, в разделе 4 рассматриваются выводы, сделанные в результате работы.Анализ частиц
Содержание этой страницы не проверялось с момента перехода от MediaWiki. Если вы хотите помочь, ознакомьтесь с руководством!
Автоматический подсчет частиц
Автоматический подсчет частиц может быть выполнен, если на изображении не слишком много соприкасающихся отдельных частиц. Ручной подсчет частиц можно выполнить с помощью многоточечного инструмента.
Сегментация, или способность отличить объект от фона, может быть сложной задачей. Однако, как только это будет сделано, объект можно будет проанализировать.
RAW Пороговое значение водосбора «AnalyzeParticles»
Установка порога
5.1.1.1 Ручное установление порога
Для автоматического анализа частиц требуется «двоичное», черно-белое изображение. Установлен пороговый диапазон, чтобы отличить интересующие объекты от фона.Все пиксели изображения, значения которых лежат ниже порогового значения, преобразуются в черные, а все пиксели со значениями выше порогового значения преобразуются в белые, или наоборот.
Есть несколько способов установить пороговые значения. Для монохромных изображений проще всего установить порог с помощью команды меню Image ›Adjust› Threshold. Порог можно установить с помощью ползунков. Пиксели в пределах порогового диапазона отображаются красным цветом. Когда вы будете удовлетворены настройками порога, вы можете нажать Применить .Это приведет к постоянному применению настроек порога и преобразованию изображения в двоичное. У вас есть разные варианты установки порога вручную. В раскрывающемся меню, установленном на по умолчанию , можно выбрать между по умолчанию, и 15 другими пороговыми методами. В раскрывающемся меню, установленном на Красный , можно выбрать цветовую схему «красный на белом», цветовую схему «черный на белом» или цветовую схему «сверху и снизу». Поле Dark Background изменит цвет переднего плана на цвет фона.Вы также можете установить флажок Гистограмма стека, чтобы создать гистограмму для всего стека.
Для цветных изображений установка порога выполняется с помощью последовательности команд Изображение ›Настроить› Порог цвета…. Метод определения порога Параметр позволяет выбрать метод определения порога, отличный от значения по умолчанию. Параметр Пороговый цвет позволяет вам выбрать красный, белый, черный или черно-белый цвет в качестве порогового цвета. Параметр Цветовое пространство позволяет выбирать между HSB, RGB, Lab и YUV.Фон порогового изображения может быть светлым или темным. Изображение можно преобразовать в двоичное изображение с помощью команды меню Изображение ›Тип› 8-бит.
Автоматический порог
Существует множество алгоритмов, которые можно использовать для расчета порога без предвзятости пользователя. Оценку более 40 из них можно найти в этой статье:
DOI: 10.1117 / 1.1631315
Fiji имеет несколько плагинов, которые можно найти в меню Изображение ›Настроить› Порог для автоматического расчета порогового значения изображения.К ним относятся пороговое значение Оцу, порог максимальной энтропии и пороговое значение для моделирования смеси. Полный список методов, доступных в Fiji, см. В разделе «Плагины», расположенном в разделе «Документация» на вкладке «Содержимое» в верхней части этой страницы.
Разделение водоразделов
Перекрывающиеся объекты в двоичном изображении можно разделить с помощью команды меню Процесс ›Двоичный› Водораздел.
Сначала преобразуйте изображение в двоичное, установив порог.Затем черные пиксели заменяются серыми пикселями с интенсивностью, пропорциональной их расстоянию от белого пикселя. Черные пиксели, расположенные ближе к краю, светлее, чем черные пиксели, расположенные по центру. Это карта евклидова расстояния (EDM) черной области. Отсюда вычисляются центры объектов. Это крайние размытые точки (UEP) каждой черной области, означающие, что они равноудалены от каждого края. Затем эти точки расширяются, пока не коснутся другого черного пикселя. Эта точка встречи — это место, где проводится водораздел.
Анализируйте частицы
Чтобы проанализировать частицы в сегментированном изображении, используйте команду меню Анализировать ›Анализировать частицы…. Это предоставит вам информацию о каждой частице изображения.
Установите минимальный размер и максимальный размер области в пикселях, чтобы исключить из изображения все, что не является интересующим объектом. Также можно выбрать значения округлости от 0,0 до 1,0, чтобы исключить нежелательные объекты. Выберите опцию Показать: контуры , чтобы отобразить изображение обнаруженных объектов.Раскрывающееся меню Показать также позволяет пользователю отображать ничего, голые контуры, эллипсы, маски, маски подсчета, контуры наложения и маски наложения. Пользователь может выбрать, следует ли отображать результаты , Очистить результаты , Суммировать , Добавить в диспетчер , Исключить по краям , Включить отверстия , Начало записи и / или Показать на месте .
Анализ частиц можно автоматизировать с помощью плагинов или макросов после определения правильного порогового значения и диапазона размеров частиц для интересующих вас объектов.
Счетчик ядер
Этот плагин автоматизирует многие шаги, описанные выше.
.
- Введите диапазон размеров для подсчета
- Выберите метод автоматического определения порога. Это может быть Current , Otsu , Максимальная энтропия , Моделирование смеси или кластеризация k-средних . Current использует порог, установленный вручную, см. Выше.
- Выполните коррекцию фона.
- Используйте фильтр Smooth .
- Выполните разделение водоразделов.
- Добавьте частицы в менеджер ROI.
- Скажите да резюме.
Другие опции могут быть легко добавлены по запросу.
Количество, площадь и средний размер возвращаются в виде текстового окна, а выделенные частицы накладываются на дубликат исходного изображения.
Ручной подсчет
Вы можете использовать встроенный многоточечный инструмент для ручного подсчета частиц.
Отслеживание частиц
Particle Tracker Particle Tracker — это модуль двумерного отслеживания точек для автоматического обнаружения и анализа траекторий частиц, записанных с помощью видеоизображения в клеточной биологии. Алгоритм описан в Sbalzarini and Koumoutsakos (2005 [1]).
TrackMate Используйте команду меню Плагины ›Отслеживание› TrackMate. Этот плагин позволяет выполнять отслеживание отдельных частиц точечных структур. Для получения более подробной информации см. Руководство и пояснения по TrackMate.
Отслеживание вручную Используйте команду меню Плагины ›Отслеживание› Отслеживание вручную. Этот инструмент позволяет отслеживать движение клетки.
Метод автоматического определения значений указателя на основе машинного зрения
В этом исследовании предлагается метод автоматического считывания указателя на основе компьютерного зрения. Более того, исследование направлено на выявление недостатков текущего метода автоматического распознавания стрелочного указателя и представляет метод, который использует схему от грубого к точному и имеет превосходные характеристики по точности и стабильности идентификации считывания.Во-первых, он использует метод наращивания области для определения местоположения области циферблата и ее центра. Во-вторых, он использует улучшенный метод центральной проекции для определения области кругового масштаба в полярной системе координат и обнаружения отметок шкалы. Затем обнаружение границы реализуется в изображении циферблата, и метод преобразования Хафа используется для получения направления указателя посредством подгонки контура указателя. Наконец, показания манометра получают путем сравнения положения указателя с отметками шкалы.Результаты экспериментов демонстрируют эффективность предложенного подхода. Этот подход применим для считывания показаний манометров, отметки шкалы которых распределены равномерно или неравномерно.
1. Введение
С быстрым развитием информационных технологий, цифровые счетчики получили широкое распространение. Но стрелочный манометр по-прежнему очень популярен в различных областях благодаря своей простой конструкции, высокой надежности, низкой цене и простоте эксплуатации. Однако из-за нецифрового выходного сигнала стрелочного манометра компьютер не может выполнять обработку и удаленную передачу данных, собранных стрелочным манометром.Это ограничивает его применение. Следовательно, необходимо срочно решить способ обеспечения стрелочного индикатора цифровыми функциями, такими как автоматическое считывание и преобразование собранных значений в цифровой сигнал, для более широкого применения. В частности, в процессе калибровки или метрологической поверки [1] контролерам необходимо считывать выходные значения эталона и показывающее значение калиброванного датчика, соответственно, а затем проводить сравнение. В этом случае могут возникать случайные ошибки из-за ограниченной остроты наблюдения человека.Кроме того, когда оператор находится далеко от манометра, оператор должен повторить считывание и вручную записать показываемое значение. Это не только увеличивает нагрузку на оператора, но и снижает эффективность калибровки манометра. Чтобы преодолеть вышеуказанные ограничения и сделать стрелочный индикатор более удобным для пользователя, ожидается, что новые технологии переведут его показания в цифровую форму. В настоящее время машинное зрение широко используется для обнаружения шкалы и указателя шкалы и последующего считывания показаний.
Это исследование направлено на применение проверки манометра и предлагает подход к автоматическому считыванию показаний стрелочного манометра на основе компьютерного зрения, который принимает схему от грубого к точному.В этом подходе область циферблата и ее центр стрелочного индикатора располагаются, во-первых, с использованием метода увеличения области. Затем область кругового масштаба определяется методом адаптивного порога в полярной системе координат. В круговой области диаграмма распределения отметок шкалы построена с использованием улучшенной центральной проекции. Согласно схеме распределения отметок шкалы, основные отметки шкалы расположены в области круговой шкалы циферблата. На следующих этапах преобразование Хафа используется для обнаружения указателя в области циферблата и определения его направления.Наконец, используется метод расстояния для получения показывающего значения шкалы путем сравнения направления указателя с положением отметок шкалы.
Поскольку значение индикации определяется путем сравнения направления указателя и местоположения отметок шкалы, этот подход также подходит для датчиков, в которых отметки шкалы распределены неравномерно. Таким образом, предлагаемый подход фактически является общим подходом к калибровке датчика.
2. Сопутствующие работы
2.1. Конфигурация аппаратной системы, используемой при проверке манометров
Аппаратная система, используемая при поверке манометров, обычно включает следующую конфигурацию [2–5], которая показана на рисунке 1. Во время рабочего процесса высокоточный манометр и калиброванный манометр работают. размещен на рабочем столе. Компьютер отправляет импульсные сигналы водителю двигателя. Таким образом, шаговый двигатель управляется так, чтобы рабочий стол перемещался, чтобы можно было регулировать положение датчика, так что датчики могут быть надлежащим образом размещены в поле зрения камеры, в то время как стандартный источник сигнала посылает эталонные сигналы на калиброванный стрелочный датчик. и высокоточный датчик.Показывающее значение высокоточного манометра рассматривается как стандартные данные. Затем применяется компьютерное зрение для автоматического распознавания значений, отображаемых калиброванными и стандартными датчиками. Наконец, выполняется сравнение двух значений, и достигается результат проверки.
Для некоторых других стрелочных приборов стандартные данные, вырабатываемые генератором опорных сигналов, напрямую вводятся в компьютер другим оборудованием для сбора сигналов. Результат проверки достигается путем сравнения стандартных данных с показаниями калиброванного датчика, полученными с помощью компьютерного зрения.
2.2. Процесс автоматического считывания показаний указателя на основе компьютерного зрения
На рисунке 2 показана процедура обработки изображения, используемая для распознавания значения указателя. Во-первых, для улучшения качества изображения необходимо предварительно обработать калибровочное изображение с помощью подавления шума и улучшения изображения. Затем используются методы обработки и анализа изображений для обнаружения указателя и отметок шкалы. В зависимости от направления указателя и расположения отметок шкалы можно определить значение, указанное стрелочным датчиком.Наконец, выводятся результаты показывающего значения. Таким образом, методы автоматического распознавания значения, указывающего датчик, в основном включают в себя три части: (1) предварительная обработка изображения, направленная на улучшение качества изображения и подавление шума, (2) обнаружение указателя датчика и меток шкалы на основе обработки и анализа изображения, (3) автоматическое распознавание показывающего значения стрелочного датчика.
2.3. Сопутствующие работы, связанные с обнаружением значения указателя указателя
В существующей литературе изображение указателя указателя должно быть предварительно обработано для удаления шума или улучшения изображения, особенно для изображений, извлеченных из промышленных полей.Предварительная обработка изображения улучшает разрешение изображения. Таким образом, с помощью анализа изображения легче обнаружить признаки, относящиеся к отметкам указателя и шкалы.
Предварительная обработка изображения стрелочного индикатора в основном состоит из двух частей. Во-первых, предварительная обработка изображения используется для фильтрации помех и шума, возникающих в результате изменения окружающей среды. Например, в [6] метод гомоморфной фильтрации был принят для обработки калибровочного изображения, которое имеет большую площадь бликов и отражений. Во-вторых, предварительная обработка изображения используется для исправления искажения изображения, вызванного формированием изображения камерой или разными углами съемки.Например, в [7] обсуждалось, как уменьшить ошибку считывания, когда шкала шкалы неровная с поверхностью объектива камеры. В статьях [8, 9] предложен интеллектуальный метод считывания показаний датчика, позволяющий избежать влияния искажения изображения; с помощью этого метода можно было скорректировать угол между указателем и отметками нулевой шкалы и угол между отметками нулевой шкалы и другими более длинными отметками шкалы. Он также принял метод интерполяции Ньютона для аппроксимации функциональных соотношений между углом указателя и его показывающим значением.
После предварительной обработки изображения должна быть реализована сегментация изображения для получения изображения бинаризации, при этом всегда применяется метод пороговой сегментации [10–13]. На следующем этапе необходимо провести прореживание изображения в бинаризованном изображении, чтобы получить изображение указателя шириной в один пиксель. Затем для обнаружения указателя используется прямолинейная аппроксимация. Таким образом, ключевым моментом автоматического распознавания показаний шкалы является обнаружение указателя и отметок шкалы. В существующей литературе было предложено несколько методов обнаружения указателей, таких как метод вычитания, метод сопоставления шаблонов, метод преобразования Хафа и метод центральной проекции.В методе вычитания [4, 14, 15] два калибровочных изображения с примерно одинаковым фоном были сделаны камерой, а указатель указывал на другой масштаб. Когда одно изображение было вычтено из другого, в разностном изображении осталось только два указателя. Затем разностное изображение было сегментировано для обнаружения указателя. Наконец, показывающее значение датчика может быть получено путем вычисления положения указателя и отметок шкалы. Метод вычитания был легко реализован посредством вычитания изображений.Однако различное изображение не только резервирует цель указателя, но также оставляет много шума из-за влияния освещения. Поэтому во многих случаях метод вычитания не дает надежных результатов.
В методе элементов шаблона [16] элементы, которые представляют указатель и его направление, такие как форма, площадь и распределение серого, сформировали шаблон с множеством параметров, используемый для сопоставления указателя на изображении датчика для обнаружения указателя. Поскольку шаблон содержит несколько сигналов указателя и его направления, с помощью метода функции шаблона можно избежать влияния неравномерного освещения и других факторов, изменяющих окружающую среду.Однако процесс сопоставления с шаблоном слишком сложен для точного обнаружения указателя.
Метод преобразования Хафа часто используется при обнаружении указателя. В [17, 18] после обнаружения краев и утончения изображения в калибровочном изображении был применен метод преобразования Хафа или его улучшенная версия для обнаружения указателя путем подгонки края указателя. Метод преобразования Хафа может обеспечить хорошие результаты для стрелочного индикатора, имеющего много слов и символов на циферблате. В [19, 20] описан новый метод обнаружения указателя, получивший название центральной проекции.Основная идея метода центральной проекции заключалась в поиске местоположения указателя посредством вычисления проекции от характерных точек до известной центральной точки. Каждое значение проекции соответствовало углу прямой линии, соединяющей проекцию и центральные точки. Должен быть угол, соответствующий наибольшему количеству точек проекции и представляющий указатель. Следовательно, для определения положения указателя датчика всегда использовался метод центральной проекции.
Метод наименьших квадратов [21] также был методом прямой аппроксимации, как и метод преобразования Хафа, который использовался для обнаружения указателя. По сравнению с методом преобразования Хафа метод наименьших квадратов требует меньше вычислений.
После того, как указатель был обнаружен, всегда использовались методы угла и расстояния [22] для определения значения индикации точечного датчика. Угловой метод распознал значение индикации путем вычисления угла отклонения между обнаруженным указателем и отметкой нулевой шкалы в соответствии с формулой.Здесь был диапазон, был предварительно измеренный угол между отметкой максимальной и нулевой шкалы и был угол между текущим указателем и отметкой нулевой шкалы. Метод расстояния [23] получил значение индикации путем вычисления расстояния между указателем и ближайшей отметкой шкалы. В этом методе каждая сетка шкалы была расположена и помечена соответствующим номером шкалы в двумерной системе координат. Если расстояние между указателем и каждой сеткой выглядит следующим образом: тогда показывающее значение указателя: Вот координаты точек в отметках шкалы, — это расстояние между точкой и линией, представляет собой показывающее значение указателя, и — значения отметок шкалы, которые расположены по обе стороны от указателя, и — расстояние между указателем и ближайшими отметками шкалы с обеих сторон, соответственно.Угловой метод проще, чем метод расстояния, но он не подходит для стрелочного датчика, в котором шкала неровная.
3. Обзор нашей работы
Как упоминалось выше, существующие методы распознавания показаний датчиков ограничены с точки зрения их практического применения, в основном из-за двух недостатков. Все существующие методы были реализованы в изображениях глобального датчика. Следовательно, сегментация отметок указателя и шкалы не может быть точно проведена при наличии некоторых помех или сложных надписей на шкале шкалы.Во многих исследованиях отметки шкалы точно не обнаруживаются. Следовательно, показывающее значение стрелочного индикатора с неровной шкалой не может быть распознано.
Это исследование направлено на преодоление недостатков существующих методов. В качестве контекстного приложения он также направлен на улучшение калибровки манометра и разработку метода автоматического распознавания показаний стрелочного манометра на основе машинного зрения. Этот метод реализует схему, которая переводит обнаружение от грубого к точному с точки зрения обнаружения указателя и масштабных меток.Во-первых, область циферблата указателя располагается на глобальном изображении. Затем располагается кольцевая область шкалы циферблата. На следующих этапах отметки шкалы обнаруживаются в кольцевой области шкалы, а указатель обнаруживается в области циферблата. Наконец, на основе результатов обнаружения указателя и отметок шкалы используется улучшенный метод определения расстояния для распознавания значения датчика. Поскольку улучшенный метод расстояния реализован от грубой области до мелкой цели, он обладает высокой способностью подавлять помехи.Поскольку показывающее значение получается при обнаружении отметок указателя и шкалы, этот метод также подходит для считывания показаний датчика, отметки шкалы которого распределены неравномерно.
3.1. Система проверки манометров на основе машинного зрения
Метрологические отделы обычно калибруют манометры с помощью поршневых манометров. В этом случае стандартное выходное давление поршневых манометров, определяемое вручную добавленными грузами, передается на проверяемый манометр. Затем квалификация манометра определяется путем считывания, анализа и сравнения показываемого значения.Как правило, персонал по проверке вручную обрабатывает этот процесс путем наблюдения путем записи и анализа показывающего значения панели приборов. С этим методом проверки все еще существует много проблем. К ним относятся низкая точность и повторяемость визуальных наблюдений человека и низкая эффективность работы из-за большой нагрузки проверяющего персонала. Следовательно, разработка метода автоматической проверки для манометров будет способствовать развитию технологий, используемых при их производстве и возможностях проверки.Состав системы для поверки стрелочных манометров показан на рисунке 3. Мы видим, что изображения стрелочных манометров получаются с помощью камеры, обрабатываются и анализируются компьютером, при этом регистрируются показывающие значения стандартного манометра и контрольного манометра и признал. Окончательные результаты показаний манометра будут отображаться на мониторе для операторов и придут к выводу о проверке на основе анализа вышеуказанных показаний. Программное обеспечение для обнаружения также имеет такие многофункциональные возможности, как хранение исторических данных, графическое отображение и переключение изображений, чтобы реализовать автоматическую проверку стрелочных датчиков.
3.2. Введение в нашу работу
В этом исследовании предлагается новый метод автоматического распознавания указателя, который указывает значение. На рисунке 4 показана блок-схема этого метода.
В общем, основанный на компьютерном зрении способ автоматического распознавания указания значения состоит из двух частей. Одна часть — это обнаружение показывающего значения стрелочного датчика. Это в основном включает в себя обнаружение шкалы и обнаружение указателя, которые относятся к расположению области циферблата и центра циферблата, определение кольцевой области шкалы на циферблате, обнаружение шкалы и обнаружение указателя.Другой — автоматическое распознавание чтения. А именно, он делает окончательную оценку показания датчика в соответствии с обнаруженным направлением указателя и распределением отметок шкалы. Как видно на рисунке 4, автоматическое распознавание показывающего значения, предлагаемое в этой статье, делится на пять этапов. (1) Область циферблата и ее центральное положение: во-первых, на всем изображении область циферблата может быть определена полу -взаимодействие (использование мыши для раскрытия поля на изображении).Пиксельная точка с наибольшим значением серого ищется в области циферблата и берется в качестве начальной точки метода роста области, используемого для создания круглой области на циферблате. В процессе метода наращивания области автоматически определяется пороговое значение подобия между точками пикселей. Наконец, в соответствии с результатами метода выращивания области, получают радиус и центр кругового диска. (2) Определение области шкалы на циферблате: координата изображения сначала преобразуется в полярную координату с центром диска как его начало координат, которое используется для выражения координаты каждого пикселя изображения.Затем, сравнивая сумму пикселей для низкого значения серого с суммой пикселей для высокого значения серого в кольцевой области, определяется кольцевая область шкалы на циферблате. И, наконец, он копируется в новое изображение как область кольцевой шкалы. (3) Метки шкалы обнаруживаются с использованием метода центральной проекции. Во вновь созданном изображении кольцевой масштабной области сначала выполняется сегментация метки масштаба с помощью метода OSTU для формирования масштабного изображения бинаризации. Затем вычисляется угол каждой линии, которая связывает черный пиксель с центром круга, и получается номер каждого угла.Углы с большими числами (соединительная линия) в узком диапазоне углов соответствуют отметкам толстой шкалы (основные шкалы) на циферблате. Таким образом, получаются углы отметок шкалы в диапазоне от 0 ° до 360 °. (4) Обнаружение указателя: сначала для реализации обнаружения границы используется оператор Кэнни. Затем используется метод преобразования Хафа для соответствия обнаруженному краю и получения контура указателя. Наконец, направление указателя получается в соответствии с центральным положением и контуром указателя. (5) Показывающее значение рассчитывается в соответствии с направлением указателя и распределением шкалы шкалы.
4. Индикационный подход к распознаванию значений указателя
4.1. Обнаружение показывающего значения указателя
Как упоминалось выше, обнаружение показывающего значения достигается с помощью шкалы и обнаружения указателя. Что касается обнаружения шкалы, сначала должны быть расположены центр шкалы и область шкалы, а затем выделение кольцевой области шкалы и обнаружение отметки шкалы. Наконец, выполняется определение направления указателя.
4.1.1. Область шкалы и ее центральное положение
Что касается определения показывающего значения, сначала необходимо определить указатель датчика и его направление, чтобы определить его центр вращения. Как правило, центр циферблата манометра — это центр вращения указателя. Следовательно, сначала необходимо обнаружить центр набора номера. В этом исследовании круговая область циферблата обнаруживается для определения центра циферблата. Как показано на Рисунке 5 (a), обычно на круглом циферблате есть метки, слова и отметки шкалы.Поэтому сложно подтвердить круговую область циферблата такими сегментными методами, как граничные и пороговые значения. Ввиду вышеизложенного, в данной статье представлен метод наращивания адаптивной области для определения местоположения круглой области датчика и, кроме того, для определения его центра циферблата. Конкретные шаги заключаются в следующем. (1) Размещение начального числа [24]: поскольку циферблат обычно белый, область с высоким уровнем серого или точка пикселя с наивысшим уровнем серого в датчике определенно находится в часть, где находится циферблат.Следовательно, последний выбирается в качестве начальной точки области роста. (2) В зависимости от сходства уровня серого пикселя, расширение области набора номера выполняется от начальной точки. Однако трудно установить подходящее пороговое значение подобия уровня серого между пикселями. Как показано на Рисунке 5 (b), круглая область циферблата не может быть полностью сформирована с малым пороговым значением, в то время как область циферблата увеличенного размера будет сформирована с большим пороговым значением.
(a) Типичный стрелочный индикатор
(b) Результаты метода увеличения области циферблата
(a) Типичный стрелочный индикатор
(b) Результаты метода увеличения области шкалы
Настоящее исследование предлагает адаптивный метод определения порогового значения подобия уровня серого; конкретный процесс выглядит следующим образом.(A) Небольшое пороговое значение подобия уровня серого выбирается эмпирически, а затем метод наращивания области циферблата выполняется от начальной точки. (B) Отношение длины описанного прямоугольника к ширине вновь созданного циферблата. область рассчитывается, чтобы определить, находится ли она в диапазоне 0,95–1,05. (C) Если соотношение длины и ширины не соответствует условиям в (B), пороговое значение подобия будет увеличено с определенной длиной шага () , и первый шаг, (A), будет продолжать рост области от точки зародыша.Однако, если он соответствует условиям в (B), растущая область будет круглой областью циферблата, центр описанного прямоугольника будет центром круга, а меньшее значение между длиной и шириной будет диаметром круглого регион (рисунок 6).
4.1.2. Расположение области шкалы на основе полярных координат
(1) Изображение в полярных координатах . В общем, в свете круговой перестановки отметки шкалы указателя распределены вокруг центра.Следовательно, чтобы правильно и целесообразно показать, где находятся отметки шкалы на изображении, для позиционирования пикселей на изображении используется полярная система координат. В этом исследовании выполняется преобразование координат изображения в полярные координаты. Это означает, что координаты пикселей, выраженные прямоугольной системой координат изображения, преобразуются в координаты, выраженные полярными координатами. Полярные координаты, определенные в этом исследовании, показаны на рисунке 7, центр круга является его началом.
(2) Определение области шкалы на циферблате . Процедура обнаружения масштабной области на основе метода адаптивного порога следующая. (A) Радиус круговой шкалы, обнаруженный в разделе 4.1.1, принимается в качестве начального радиуса, а его длина шага уменьшается и равна начальной. На шкале шкалы разница значений серого между отметками шкалы и фоном циферблата обычно довольно велика. Следовательно, для сегментации шкалы может быть использован метод адаптивного порогового значения.В полярных координатах изображение кольцевой бинаризации получается путем использования метода OSTU [25] для выполнения сегментации бинаризации в кольцевой области. (B) Отношение между количеством черных и белых точек пикселей в кольцевой области бинаризации между радиус и рассчитывается и обозначается. После уменьшения внутреннего радиуса в соответствии с длиной шага вычисляется соотношение между количеством черных и белых точек пикселей в области между и и обозначается как. (C) Если явно отличается от, внутренний радиус и внешний радиус области масштаба будет и, соответственно.(D) При приближении к, кольцевое пространство между и все равно будет в области кругового масштаба. В этот момент пусть; соотношение между количеством черных и белых точек пикселей в кольцевом пространстве между и вычисляется и по-прежнему обозначается как. Затем перейдите к (B) (Рисунок 8).
После получения кольцевой области шкалы в вышеуказанной полярной координате, область шкалы выбирается на основе угла и радиуса и копируется в новое изображение, называемое изображением области отметки масштаба (рис. 9).
4.1.3. Обнаружение масштабных меток на основе улучшенного метода центральной проекции
В вновь созданном изображении, которое является кольцевой масштабной областью, применяется метод OSTU для сегментирования масштабных меток для формирования бинаризованного масштабного изображения. На этом изображении значение в пикселях метки шкалы равно 0 (черный), а в других местах — 255 (белый). Каждая точка черного пикселя и центр круга связаны, и наклон соединительной линии вычисляется по формуле, где — угол между осью -осью и соединительной линией между точкой черного пикселя и центром круга.Из-за того, что начало координат изображения находится в верхнем левом углу, а ось — направлена вниз, неудобно обозначать центральный угол в пределах 0–360 °. Поэтому в этом исследовании вместо системы координат изображения вводится прямоугольная система координат с центром изображения в качестве его начала, чтобы выразить угол между точкой черного пикселя на отметке шкалы и центром круга. Как показано на рисунке 10, углы между точкой черного пикселя и центром круга находятся в диапазоне 0–360 °.
(а) Схема системы координат изображения
(б) Прямоугольная система координат
(а) Схема системы координат изображения
(б) Прямоугольная система координат
После вычисления числа для угла угол с большим числом (соединительные линии) в малом диапазоне углов соответствует значению толстой шкалы (основной шкалы) на циферблате. Шаги по обнаружению отметки шкалы по центральной проекции подробно описаны ниже.
Черная точка пикселя и центральная точка изображения, то есть центр круга в новом изображении, связаны для определения наклона, который преобразуется в угол по следующей формуле:
Как показано на рисунке 10, система координат изображения преобразуется в прямоугольную. Угол по формуле (4) преобразуется в угол в прямоугольной координате:
Гистограмма углов создается путем регистрации частоты появления каждого угла.На рисунке 11 показана гистограмма углов.
Выбирается угол с наибольшим временем появления в гистограмме и обозначается значком; все углы, время появления которых больше найденного. Моменты появления углов обозначены. Здесь представляет углы, которые встречаются больше чем.
Для каждого угла мы вычисляем средневзвешенное значение по следующей формуле: Здесь — знак угла.
Рассчитайте конкретное значение по следующей формуле:
Если находится в пределах 0.Диапазон 9–1,1 — угол жирной отметки. Все последовательно отсортированные углы принимаются равными, что соответствует отметкам толстой шкалы. Таким образом, жирные отметки шкалы расположены на Рисунке 12.
4.1.4. Улучшенное обнаружение указателя на основе преобразования Хафа
Обнаружение края реализовано в изображении указателя датчика с использованием оператора Канни для получения изображения края датчика. Затем применяется метод преобразования Хафа, чтобы подогнать прямую линию к изображению, чтобы получить все прямые линии, среди которых есть граница указателя.Наконец, можно определить только границу указателя, исключив другие прямые края.
Метод преобразования Хафа применяется для подбора прямой линии и поиска всех прямых линий на изображении. Кроме того, вычисляется каждая прямая линия, описываемая в системе координат изображения посредством.
Расстояние от центра круга до прямой рассчитывается по следующей формуле:
На основании предварительных знаний мы знаем, что расстояние от центра круга до прямой линии указателя намного меньше. чем диаметр циферблата; выделяются все прямые, соответствующие.Вот диаметр циферблата.
Угол каждой прямой линии рассчитывается по формуле (8) и сохраняется в массиве:
Поскольку углы направления указателя острые, обычно в диапазоне ~, угол рассчитывается с учетом по следующей формуле:
Если это так, прямая линия должна быть выбрана как одна сторона указателя. Таким образом, можно найти обе линии, в которых лежат две стороны указателя.
По прямым линиям двух сторон можно определить направление указателя.
4.2. Индикатор указателя, показывающий распознавание значения
Как показано на рисунке 11, точка пересечения двух прямых линий границы указателя вычисляется и затем связывается с центром круга. Угол линии,, вычисляется. В соответствии с положением точки пересечения, угол, в прямоугольной системе координат вычисляется по формуле (1) (рисунок 13).
В зависимости от угла, получаются показания, соответствующие каждой отметке толстой шкалы.На основании угла, соответствующего толстой отметке шкалы, и ее номера, который определяется в разделе 4.1.4, показание указателя может быть определено по формуле (10). Масштаб в соседних метках толстой шкалы делится линейной интерполяцией: здесь углы, соответствующие меткам толстой шкалы.
5. Экспериментальные результаты и анализ
Для проверки эффективности предложенного подхода проводится серия экспериментов для проверки его производительности.
5.1. Схема эксперимента
Эксперимент состоит из двух частей. Сначала выбираются изображения стрелочных приборов различных типов для проведения имитационных экспериментов и проверки эффективности и применимости подхода. Затем устанавливается система калибровки манометра, которая состоит из поплавкового манометра, высокоточного манометра, испытательного манометра, камеры и компьютера, для проверки фактических характеристик этого подхода при калибровке стрелочного манометра.
5.2. Часть первая экспериментов: идентификация чтения различных указателей
5.2.1. Выбор образцов
Как видно из таблицы 1, для эксперимента выбраны две группы репрезентативных образцов. К ним относятся манометр с множеством надписей на циферблате и расходомер с неровной шкалой.
| ||||||||||||||||||||||||||||
5.2.2. Экспериментальные результаты и анализ
В этой части эксперимента мы применяем предложенный подход к автоматическому распознаванию показывающего значения вышеупомянутых двух типов датчиков. Чтобы проверить эффективность предлагаемого подхода, на рисунках 14 и 15 показаны экспериментальные результаты каждого шага.
Рисунок 14 (а) — исходное изображение указателя. Из рисунка 14 (а) видно, что указатель и отметки шкалы не могут быть непосредственно обнаружены методами сегментации, поскольку на циферблате много надписей.Таким образом, в предлагаемом подходе используется идея, которая выполняет поиск от грубого к точному. Области циферблата и шкалы располагаются первыми, так как их легче обнаружить, чем указатель и отметки шкалы. Как показано на рисунках 14 (c) и 14 (d), область шкалы расположена с использованием метода наращивания адаптивной области, а область шкалы обнаруживается в полярной системе координат. Затем в обеих областях точно определяются указатель и отметки шкалы. Как показано на рисунках 14 (e) и 14 (f), улучшенный метод преобразования Хафа принят для обнаружения указателя, а улучшенный метод центральной проекции используется для обнаружения отметок шкалы.Расположение жирных отметок шкалы определяется в соответствии с гистограммой углов, полученной из центральной проекции отметок шкалы. Их показательные значения даны в соответствии с расположением толстых отметок шкалы. Значения шкалы внутри любых двух соседних толстых меток определяются линейным делением. В соответствии с направлением указателя и положением отметок шкалы для указания значения шкалы указателя используется метод угла, который используется в соседних отметках толстой шкалы.
Предлагаемый подход определяет направление указателя и положение отметок шкалы соответственно. На рисунках 15 (e) и 15 (f) можно видеть, что положение отметок шкалы точно определяется по угловой гистограмме, а указатель обнаруживается в области циферблата. На основе расположения отметок шкалы и направления указателя расстояние между указателем и соседними отметками шкалы можно рассчитать с помощью метода расстояния; затем можно оценить значение, указывающее указатель.Таким образом, независимо от того, является ли распределение шкалы равномерным, предлагаемый подход может точно определять значение индикатора, в то время как самые современные существующие методы не могут.
5.3. Часть вторая экспериментов: Распознавание значения индикатора поплавкового указателя
5.3.1. Система и процедура экспериментов
Для проверки эффективности практического применения предложенного подхода в практическом применении, поплавковый манометр используется в качестве системы проверки манометра.Тип поплавкового датчика — Y-047. Основные технические параметры поплавкового датчика описаны ниже. Диапазон выходного давления 0,01–0,25 МПа; класс точности 0,05%; номинальное давление 0,5 МПа; стандартные веса от 0,01 МПа до 25 МПа. В качестве стандартного манометра используется высокоточный манометр с классом точности 1,5. Контрольный манометр — это прибор с общей точностью. Перед поплавковым датчиком установлена система визуального обнаружения. В качестве датчиков изображения используются оптический объектив с регулируемым фокусным расстоянием от 10 до 20 мм и 500-мегапиксельная HD CMOS-камера с частотой кадров 60 кадров в секунду.Система оснащена коаксиальным источником света, который размещен на объективе камеры. Аппаратная конфигурация компьютера, используемого в этом эксперименте, — Inter Pentium® Dual, CPU E2200 и частота 2,2 ГГц. Среда программирования — VS2010. Система проверки стрелочного датчика, основанная на компьютерном зрении, показана на рисунке 16. Камера, используемая в экспериментах, снимает изображения высокоточного стандартного датчика и тестового датчика. Предлагаемый подход принят для определения показывающего значения как стандартных, так и тестовых манометров.
Согласно правилам калибровки манометра, процедура эксперимента следующая. Сначала проводится положительный удар. Здесь выходная мощность поплавкового датчика увеличивается за счет постепенной загрузки грузов, в то время как показывающее значение датчика увеличивается. В каждой контрольной точке показывающего значения камера делает снимки как стандартного указателя, так и тестовых датчиков. Предлагаемый подход заключается в использовании изображений для распознавания показывающих значений. Затем выполняется отрицательный ход, процесс которого заключается в том, что выходная мощность поплавкового датчика уменьшается от наивысшей контрольной точки за счет постепенной разгрузки грузов, в то время как показывающее значение датчика соответственно уменьшается.Изображение каждой контрольной точки делается для распознавания показывающих значений.
5.3.2. Результаты экспериментов и анализ
Результаты экспериментов показаны на рисунках 17 и 18. Верхний предел датчика составляет 0,25 МПа; нижний предел — 0 МПа. Каким бы ни был эксперимент, при положительном или отрицательном ходе хода интервалы на выходе поплавкового манометра составляют 0,025 МПа. Результаты обнаружения для показывающих значений стандартного и испытательного манометров показаны в таблицах 2 и 3, соответственно.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Как видно из результатов экспериментов, предложенный подход применим для поверки манометров.Показательные значения испытательного и стандартного манометров могут быть получены с помощью предлагаемого подхода, а не путем ручного наблюдения. Калибровка контрольного манометра завершается сравнением показывающего значения контрольного манометра со значением эталонного манометра. Из экспериментальных результатов в таблицах 2, 3 и 4, сравнивая визуальные данные с ручным считыванием, мы можем видеть, что результаты обнаружения показывающего значения на основе компьютерного зрения более точны, достоверны и имеют более значимые цифры и более быстрый скорость обнаружения.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
5.4. Экспериментальное заключение
Из приведенных выше экспериментальных результатов мы можем сделать следующие выводы: (1) показывающее значение стрелочного датчика может быть эффективно обнаружено с помощью метода, предложенного в этой статье; подход может быть использован для поверки манометра. (2) Подход предлагает стабильную основу для идентификации показаний стрелочного манометра.При переходе от большой области к маленькой цели подход сначала определяет масштаб и область указателя. Затем он точно сегментирует указатель и отметки масштаба в целевой области. Наконец, показывающее значение шкалы получается на основе направления указателя и распределения отметок шкалы. Эта структура представляет собой общий метод распознавания стрелочного датчика на основе компьютерного зрения и обладает хорошей помехоустойчивостью. Однако для достижения более удовлетворительных результатов при его практическом применении каждый шаг должен быть улучшен.Например, в процессе определения местоположения области циферблата на основе метода увеличения области необходимо учитывать множество факторов, чтобы определить, следует ли прекращать использование этого метода. (3) В практическом применении метод предварительной обработки изображения должен использоваться вместе с предлагаемым методом для получения более удовлетворительных результатов, особенно для некоторых промышленных областей применения.
6. Заключение
В этом исследовании предлагается подход к автоматическому считыванию указателей, основанный на компьютерном зрении.Подход направлен на устранение недостатков в существующем подходе к автоматическому считыванию показаний стрелочных приборов и применении поверки манометров. В рамках предложенного подхода, который проводится от сегментации большой области до обнаружения малой цели, сначала определяется целевая область на циферблате. Затем в этой области обнаруживаются указатель и отметки шкалы. Наконец, получается показывающее значение манометра. Таким образом, предложенный подход обладает хорошей помехоустойчивостью и применим как для манометров с равномерно распределенными отметками шкалы, так и без них.Этот подход может быть широко применен для идентификации показаний стрелочных приборов различных типов.
Предлагаемый метод является надежным и достаточно точным, чтобы его можно было использовать для поверки стрелочных приборов. Однако в некоторых практических приложениях, особенно в промышленности, его следует использовать, комбинируя его с методами предварительной обработки изображений, чтобы добиться лучших эффектов. Усовершенствованный подход также может быть использован для стрелочного индикатора с некруглым циферблатом. Поэтому в будущем мы проведем следующие исследования, чтобы завершить работу по оцифровке стрелочного индикатора, чтобы разработать общий метод считывания показывающих значений.Методы предварительной обработки изображения будут разработаны для устранения влияния паразитного или отраженного света или для исправления искажения изображения, вызванного изменениями относительного положения камеры и датчика. Будет разработан общий метод автоматического считывания для различных типов стрелочных приборов, которые могут использоваться в различных аппаратных системах и иметь унифицированный стандартный выходной формат.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Работа поддержана Пекинской программой развития ключевых дисциплин (№ XK100080537), Пекинским фондом естественных наук (4122050) и проектом открытия ключевой лаборатории технологий безопасности эксплуатации транспортных средств Министерства транспорта Китая.
Автоматическое определение границы сонной артерии на последовательностях поперечных сечений МР-изображений с использованием динамического программирования под управлением круговой модели | BioMedical Engineering OnLine
МРТ-измерение максимального систолического и дистального диаметра сосуда ОСА с дополнительной информацией об артериальном давлении привело к локальному податливости артериальной стенки.После одобрения местного этического комитета в соответствии с Хельсинкской декларацией 12 участников проекта TEFR09 Немецкого исследовательского фонда (DFG-Project GZ: SCHU 2514 / 1-1, AOBJ: 565344) были собраны для сосудистых заболеваний. исследования на основе последовательностей МР-изображений. Одна последовательность МРТ одного пациента была случайным образом выбрана из этих 12 субъектов для проверки нового алгоритма обнаружения просвета ОСО, представленного в этом исследовании.
Для получения последовательностей МРТ сосудов мобильный 1.Использовались 5-T МРТ (Siemens — Avanto ™, Model Mob. MRI 02.05, Siemens Ltd., Эрланген, Германия) и специально разработанная четырехканальная фазированная двухрежимная шейная матричная катушка с 4 встроенными предусилителями (Siemens Ltd.). . Артефакт движения был минимизирован за счет использования специальной системы подголовника (катушка для головы, Siemens Ltd.) для фиксации головы и шеи в удобном положении (положение пациента: лежа на спине, голова к ногам).
После первоначального коронального локализатора три быстрых локализатора (трипланарный TRUFI: «истинно быстрое построение изображений с устойчивой точностью»; Siemens Ltd.) были использованы для определения аксиального перпендикулярного места сбора данных в правой ОСА на 10 мм ниже бифуркации сонной артерии. Контрастные среды нельзя было использовать в этом исследовании, потому что спортсмены не принимали их.
Для увеличения пространственного разрешения измерения (поперечное сечение ОСА) кинопоследовательность градиентного эхо-сигнала, взвешенная по T2 * (ВСПЫШКА: «быстрый снимок под малым углом», Siemens Ltd.) с предполагаемой двумерной ЭКГ. использовался стробирование (запуск сердца). Были установлены следующие параметры: угол поворота 15 °, время эхо-сигнала 5.41 мс, время повторения 34,74 мс, толщина среза 6 мм, поле зрения 289 см 2 , размер матрицы 320 × 320, размер пикселя 0,53125 мм ISO, ширина полосы пикселей 250, количество изображений в последовательности: 50 изображений для одного RR- цикл. Время получения изображения составляло приблизительно 5 минут для каждой последовательности.
2.1 Определение положения сонной артерии
Определение положения сонной артерии является первой процедурой, поскольку она может сократить время следующих вычислений. Эта процедура определяет только грубое центральное положение артерии, но не границу артерии.Здесь мы предлагаем легко реализуемый, но быстрый алгоритм выполнения этой работы.
Чтобы идентифицировать сонную артерию, мы сначала анализируем ее особенности. Обычно на МРТ-изображениях можно увидеть некоторые крупные сосуды, включая сонные артерии, внутренние яремные вены и внешние яремные вены (см. Рисунок 1). Среди них два самых крупных сосуда — сонная артерия и внутренняя яремная вена. Внутренняя яремная вена часто больше сонной артерии, но только в положении лежа на спине из-за наполнения при более низком давлении.Другое исключение — аномальная гипопластическая ситуация. Однако это не относится к нашим испытуемым. Другое отличие состоит в том, что поперечный разрез общей сонной артерии всегда круглый, за исключением бляшек в просвете артерии. Более того, просвет сосуда на МР-изображениях имеет большую интенсивность. Это связано с тем, что кровь в сосудах показывает более высокую интенсивность сигнала в T2-взвешенных последовательностях FLASH. Из-за кровотока также происходит фазовый сдвиг. Это причины более высокой интенсивности просвета сосуда по сравнению с темной стенкой сосуда.Эти три характеристики (размер области, форма и интенсивность) являются полезной информацией при идентификации сонной артерии.
Рисунок 1Одно из изображений МРТ содержит интересующие нас сонные артерии . Сонные артерии — это артерии, расположенные рядом с внутренними яремными венами, они округлые и имеют меньшую интенсивность.
Первая характеристика, которую мы используем, — это интенсивность, чтобы отличить просвет сосуда от других тканей. Изображение содержит передний план (объект) и фон.Фон — это темная область вокруг объекта. На переднем плане — мидии, сосуды, кости, воздушные камеры и другие ткани или органы. Среди них воздушная камера темная, поэтому ее легко исключить, как и фон. Остальное — выявить сосуды из других тканей. Поскольку просвет сосуда легче другого, мы можем классифицировать их, используя интенсивность как характеристику. Пусть R обозначает необработанное изображение. Метод определения порога Оцу [10] применяется в два этапа. Первый этап — это сегментирование переднего плана (за исключением воздушных камер) из изображения.Затем извлеченный передний план снова сегментируется с помощью техники Оцу на втором этапе. После этого процесса некоторые просветы сосудов могут быть сегментированы, однако с некоторыми шумами. Первый этап можно сформулировать следующим образом.
(1)
, где T 1 — порог, полученный методом Оцу. Фон отмечен знаком -1, который будет проигнорирован на втором этапе. Второй этап формулируется следующим образом.
(2)
, где T 2 — порог, полученный методом Оцу, который представляет собой значение между серым значением просвета сосуда и других тканей.Примечательно, что вычисление T 2 основано на предварительном условии игнорирования фона, помеченного как -1 на первом этапе. После этого просветы сосуда сегментируются.
Полученное изображение содержит шумы, которые необходимо удалить. Затем применяется операция бинарного морфологического открытия с помощью структурного элемента, чтобы отфильтровать шум и отсечь возможные соединения между внутренней яремной веной и сонной артерией. Фильтрация формулируется как
(3)
где s — элемент конструкции в форме диска (радиус равен 1).Более ясно, у него есть центральный пиксель (контрольная точка) и пиксели с четырьмя соседями.
После этого остальные характеристики (размер и форма области) используются для идентификации сонной артерии от других сосудов. Этот процесс разделен на левую и правую части. Предположим, мы обрабатываем одну часть из них, выбраны две самые большие области: внутренняя яремная вена и сонная артерия. Их граничные точки получаются с помощью простой операции Собеля [11]. После этого применяется PCA (анализ главных компонентов [12]), чтобы получить большую и малую оси.Отношение длины этих двух осей является признаком того, является ли форма круглой. По этой схеме мы можем отличить сонную артерию от других сосудов. После того, как его центральное положение оценено, область интереса (ROI) обозначается как R . s извлекается из исходного изображения R для следующих процедур, в то время как центр артерии центрируется на R с . Размер региона ( R s ) зависит от размера пикселя МР-изображений и анатомических знаний, насколько большой может быть сонная артерия.Это можно рассчитать заранее.
2.2 Обнаружение границы сонной артерии
2.2.1 Направленный градиент
Результаты, полученные с помощью метода, описанного в разделе 2.1, не дают точных границ артерии. Это связано с тем, что метод определения порога Оцу никогда не дает хороших результатов в случае, если интенсивность не является постоянной для каждого объекта (здесь сонная артерия), который необходимо измерить. Особенно возможно, что операция морфологического открытия приведет к уменьшению фактического размера артерии.Поэтому мы предлагаем метод определения точной границы артерии. Поскольку граница артерии имеет интенсивность, отличную от окружающей ее области, градиент уровня серого является полезной информацией. Однако внутренняя яремная вена находится очень близко к артерии на изображениях, что затрудняет определение границ, если мы рассматриваем только градиент интенсивности. Этот случай хуже, если градиент интенсивности на границе вены сильнее, чем на границе артерии. Поэтому мы принимаем во внимание направление и называем этот градиент направленным градиентом.В литературе мы не находим никаких аналогичных публикаций, кроме направленного вектора градиента потока в [13]. Наше соображение заключается в следующем: поскольку просвет артерии ярче, чем окружающие его области, представляют интерес градиенты, полученные от ярких пикселей к темным пикселям. Если центр артерии известен, то можно найти направленный градиент, параллельный линиям излучения, центрированным от артерии. На самом деле направленный градиент — это частный случай разнонаправленного градиента.
На рисунке 2 показано геометрическое построение направленного градиента.Рассмотрим точку, которую мы обрабатываем: p ( x , y ) ∈ R s , вычисляется единичный вектор (), соединяющий p и центральную точку артерии. Все пространство, в котором может быть размещено, разделено на восемь областей, то есть угловое разрешение составляет 45 градусов. Уровни серого вокруг p ( x , y ) обозначаются как от g 1 до г 8 . Поскольку ось Y на изображении идет сверху вниз, мы определяем Область 1 как область, где θ — угол между осью x и осью x, (-π ≤ θ ≤ π ).Если находится в Области 1, при вычислении направленного градиента учитываются только две пары уровней серого ( g 4 , г 5 ) и ( г 8 , г 1 ) следующим образом:
Рисунок 2Геометрическое определение для расчета направленного градиента .
(4а)
, где t = 4 θ / π .Если находится в Области 1 ‘(-π ≤ θ ≤ — 3π / 4), формулу можно переписать как:
(4b)
Где t = 4 ( θ + π ) / π . Расчеты при нахождении в других регионах аналогичны. С помощью этой схемы может быть получена карта краев, представляющая интенсивность градиента и обозначенная как R . и . В частности, мы ищем градиенты от ярких пикселей к темным.Следовательно, карта краев, которую мы ищем, имеет минимальное значение. Отрицательный градиент обозначает граничный уровень серого, изменяющийся от яркого пикселя к темному пикселю вдоль вектора, который нам нужен. Таким образом, положительный градиент, возникающий из яремной вены очень близко к сонной артерии, не будет влиять на поиск границы артерии. Впоследствии положительные значения в R и устанавливаются на нули, и снова применяется метод определения порога Оцу, чтобы найти пороговое значение. Метод бинаризации применяется к R e : значения ниже порога устанавливаются в единицы.Результирующее двоичное изображение обозначается как R . б .
2.3 Круговая модель и динамическое программирование
Информация о круглой форме артерии важна. Он используется, чтобы избежать возможных ошибок, вызванных местными шумами. Эти ошибки включают неоднородный градиент, полученный в просвете артерии и на границе. Чтобы решить эту проблему, мы применяем преобразование Хафа [14] для обнаружения круглых объектов в R б . Преобразование Хафа — это метод извлечения признаков, используемый в анализе изображений, компьютерном зрении и обработке цифровых изображений.Необходимо определить три переменные: положение центра окружности (координаты x и y ) и радиус. Хотя радиус артерии заранее неизвестен, диапазон его вариаций можно оценить. Следовательно, мы должны вычислить его преобразование Хафа, варьируя радиус от до . 1 до r n ∈ N. После преобразований каждый радиус получает аккумуляторную матрицу. Мы ищем максимальное значение в каждой матрице аккумуляторов и находим ту, которая имеет максимальное значение среди всех матриц аккумуляторов.Соответствующие радиус и положение — это радиус и центральное положение артерии соответственно.
Хотя просвет артерии в целом круглый, с точки зрения пикселя это не так. Кроме того, не весь просвет артерии является круглым во время цикла сердечных сокращений. Некоторые из них имеют эллиптическую форму. Затем необходима точная настройка для получения субпиксельной точности. По этой причине мы предлагаем метод определения границы артерии на основе модели круга.
Динамическое программирование — это метод решения сложных проблем путем разбиения их на более простые этапы, используемый в математике и информатике [15].Он применим в обработке изображений для решения оптимальных задач, таких как нахождение минимума (или максимума) с некоторыми заданными ограничениями [16, 17]. Однако ограничение использования этого метода в изображениях заключается в том, что он не может решить контур замкнутой формы. Одно из решений — преобразовать изображение из декартовой координаты в полярную координату [18], а затем применить динамическое программирование к полярной координате. Обратите внимание, что эта процедура применяется только к интересующей области (ROI). Однако должны быть выполнены два предварительных условия: 1) известно приблизительное положение центра; 2) контур имеет звездообразную форму.Наша проблема отвечает этим двум предварительным условиям.
Подробно динамическое программирование оформлено следующим образом. В разделе 2.2.1 мы получили направленный градиент R и . Пусть M и N обозначают количество строк и столбцов R . и соответственно. Нормализация применяется к R e , так что значения варьируются от -1 до 1, то есть -1 ≤ R e ≤ 1.С центра р е — центр артерии, преобразуем р e в полярное представление и обозначить его как R с. . Ось x R p представляет угол 0 ≤ θ ≤ 2π, а ось Y представляет расстояние до центральной точки в R и . Примечательно, что θ = 2π представляет начальную точку, скопированную в конец матрицы R p , чтобы убедиться в непрерывности между начальной и конечной точкой.Затем динамическое программирование ищет кривую слева направо R p , в котором представлена граница артерии. Некоторые особенности приняты во внимание.
-
1)
Непрерывность кривой: рассматривается переменная непрерывности. Пусть д r обозначают максимальный диапазон, в котором узлам в столбце x — 1 разрешено переходить на следующий столбец x в направлениях вверх или вниз.Следовательно, каждый узел имеет максимум (2 d r + 1) возможные пути ссылки на предыдущий столбец. Если d r устанавливается больше, шероховатость кривой и время вычисления увеличиваются. Плавность кривой количественно определяется как j = y x -1 — y x , который встроен в функцию стоимости.
-
2)
Модель круга: Модель круга с известным радиусом встроена в структуру для управления динамическим программированием. Это основано на том факте, что граница артерии близка к круглой, а радиус оценивается с помощью преобразования Хафа ранее. Модель Гаусса используется для определения силы динамического программирования, основанного на круговой модели.Пусть r обозначает известный радиус окружности, прочность формулируется как, где σ — переменная, контролирующая прочность направляющей. Если σ становится меньше, гауссиан имеет тонкую, но резкую форму, а круговая модель оказывает большее влияние на результат, то есть это более кругообразная граница. Если σ становится больше, гауссов член исчезает, и он работает как обычное динамическое программирование без круговой модели. Поскольку y и r являются целыми числами, можно настроить справочную таблицу, чтобы сократить время вычислений.
-
3)
Направленный градиент: Направленный градиент — очень важная информация для точного определения границы артерии. Градиенты с отрицательными значениями обозначают границу сонной артерии, а положительные градиенты обозначают другую границу, которую мы рассматриваем как шумы. Таким образом, задача обнаружения границ затем преобразуется в задачу оптимизации, которая ищет оптимальный контур:
с некоторыми ограничениями, где р и — точка в столбце i в матрице R п и п. к и п. к +1 квартал.Эту функцию оптимизации можно переформулировать так, чтобы она подходила для реализации динамического программирования с учетом функции стоимости, сформулированной следующим образом.
(5)
при условии 2 ≤ x ≤ N , 1 ≤ y ≤ M ;
, где α — весовой параметр. C ( x , y ) — это двухмерная карта стоимости. Задача глобальной оптимизации аналогична ее подзадаче C ( x — 1, y ), C ( x — 2, y ), и наоборот.Устанавливаем C (1, y ) = R p (1, y ) как граничное условие. Если d r = 1, оптимальный показатель j * можно определить по следующему уравнению:
(6)
Следовательно, индекс можно сохранить в матрице координат X ( x , y ) = y + j *. В этой конструкции небольшие значения стоимости указывают более вероятную граничную информацию.Ищется позиция с минимальным значением стоимости на карте стоимости C ( x , y ). При обратном поиске от N до 1 в X полные координаты ( p 1 п 2 п 3 … п N ) границы артерии, что является оптимальным решением этой проблемы. Примечательно, что процессы, описанные в разделе 2.3, применяются только к извлеченной рентабельности инвестиций ( R с , R e и R p ), чтобы значительно сократить время вычислений.Результаты, полученные с помощью динамического программирования, являются целыми числами. Чтобы сделать границу более гладкой, применяется метод скользящего среднего [19]. Чтобы сократить время вычислений, мы просто усредняем соседние 4 точки и центральную точку. Затем полученные полярные координаты преобразуются обратно в декартовы координаты.
2.4 Надежность системы
Предлагаемая система была исследована на надежность при различных уровнях шума и различных контрастах.
Чтобы изучить влияние на разные контрасты, мы тестируем одну последовательность изображений с разными контрастами.Пусть [0, g max ] будет контрастным разрешением необработанного изображения. Контрастность ухудшается на коэффициент от 0,9 до 0,5 с шагом -0,1, и мы называем их контрастностью 90% и контрастностью 50% соответственно. Следовательно, контрастное разрешение 50% контраста будет [0, int (0,5 g max )] и наоборот, где int (x) преобразует число «x» в целое число, наиболее близкое к «x». Все необработанные изображения преобразуются в ухудшенные изображения на основе заданного соотношения. После этого предложенная система применяется к этим изображениям с ухудшенным контрастом, и площадь поперечного сечения просвета сонной артерии каждого изображения вычисляется для следующего сравнения.Сравнение выполняется путем вычисления их относительных погрешностей со знаком следующим образом:
(7)
, где A Automated ( i ) и A Manual ( i ) — это площади, рассчитанные с помощью автоматизированного и ручного рисования на изображении с номером i , соответственно.
Чтобы изучить надежность системы по отношению к уровням шума, мы добавляем искусственные белые шумы (генерируемые случайным образом) с заданным SNR (отношением сигнал / шум) в диапазоне от 20 дБ до 16 дБ с шагом -1.Расчет SNR представлен следующим образом:
(8)
, где M × N обозначает размер изображения, g ( x , y ) и n ( x, y ) — интенсивности изображения и шума в координатах изображения ( x, y ), соответственно.