Что такое матрица в фотоаппарате и для чего она нужна | Красиводел
Добрый день, уважаемые читатели! Сегодня поговорим о том, что такое матрица в фотоаппарате. Вы, наверно, столько раз сталкивались с этим понятием во время покупки, но до сих пор никто так и не объяснил, какое значение она несёт? Давайте вместе разберемся.
Общие понятия
Если у вас съемный объектив на фотоаппарате, то ее очень легко увидеть, когда нет объектива. Вы снимаете объектив и глядите внутрь, и что вы видите? Да, вы видите матрицу — этот блестящий прямоугольник и является ею.
Матрица в фотоаппарате являет собою микросхему. Она, в свою очередь, состоит из светочувствительных элементов. Когда вы нажимаете кнопку спуска, то происходит фиксация световых элементов.
После этого они сохраняются в определённой последовательности. Простыми словами, вы получаете фотографию. Именно от этого элемента зависит, насколько хорошее изображение мы получим в результате съёмки.
От матрицы зависит и количество мегапикселей, которое будет иметь фотокамера. Минимальное значение составляет 0,3 мегапикселя. Максимум может достигать 20 и более. На что это влияет? На качество фотографии и на стоимость фотоаппарата – чем дороже, тем качественнее.
Минимальное значение составляет 0,3 мегапикселя. Максимум может достигать 20 и более. На что это влияет? На качество фотографии и на стоимость фотоаппарата – чем дороже, тем качественнее.
Свойства
Подходя к вопросу выбора матрицы, стоит обратить пристальное внимание на цену. На недорогом зеркальном фотоаппарате она будет среднего качества и выдавать посредственное изображение.
Поэтому следует сразу выделить достаточную сумму для покупки. Определяющими параметрами являются:
- Соотношение «сигнал-шум»
- Динамический диапазон
- Разрешение
- Уровень светочувствительности
- Размер
В фотографии важным параметром считается именно размер. От него зависит множество параметров. Какие, спросите вы?
- Уровень «шума» фотографии. Большой размер обеспечивает меньший уровень шума.
- Насыщенность цвета и его глубина. Больший размер обеспечивает более насыщенные и яркие цвета. Такая матрица позволяет передать все оттенки цветов и переходы между ними, на что маленькая не способна.

- Широта динамического диапазона. Аналогично насыщенности: больше — лучше.
Виды
Сейчас на рынке представлены
• CCD
• CMOS
• APS-C
И на что нужно ориентироваться в этом вопросе, спросите вы? Всё просто: от её вида зависит качество фотографии. В основном, на рынке представлены CMOS-матрицы. Они обеспечивают низкий уровень шума.
APS-C такие типы ставят на кроп матрицы в Canon и Nikon фотоаппаратах.
CCD, в свою очередь, позволяет добиться более приятных для глаза цветов. Поэтому всё зависит от того, какую цель вы преследуете.
Чувствительность
Не менее важным параметром является и чувствительность матрицы. От неё зависит возможность фиксации предметов, которые плохо освещены. Но не стоит забывать, друзья, что высокая чувствительность увеличивает и уровень шумов на фотографии.
Низким уровнем принято считать значение в 50 единиц (по меркам ISO). При таком раскладе шумов не наблюдается при хорошей освещенности. Конечно, более профессиональные фотоаппараты способны делать фотографии и с высоким значением ISO. Я часто делаю фото и при ISO 2500 и, бывает 3000, и фотографии получаются очень качественные. Но это профессиональная техника.
Я часто делаю фото и при ISO 2500 и, бывает 3000, и фотографии получаются очень качественные. Но это профессиональная техника.
Сигнал-шум
На любом фото присутствуют шумы. Их не избежать, дорогие читатели, помните об этом! Но можно уменьшить их количество. При отсутствии света фотодатчик всё равно фиксирует какое-то присутствие света.
Это и называют шумом. Способность фотоаппарата преодолеть этот шум и есть величина «сигнал-шум». Чтобы уменьшить количество шумов нужна матрица высокого разрешения. Это позволит максимально снизить уровень шума и уменьшить выдержку. Тогда и снимки получаются хорошими.
Разрешение
Почему-то многие при покупке обращают внимание исключительно на этот параметр. Не вводите себя в заблуждение! Чем больше разрешение, тем меньше пиксели. Поэтому фиксируется больше деталей и изображение, по идее, должно быть лучше. Но это не всегда так.
При большом разрешении матрицы увеличивается её нагрев. В результате этого уровень шумов на фотографии также повышается, а качество, напротив, падает. Хотя, на профессиональных моделях, допустим на Никоне, там 36 МП в фотоаппарате, и там нет этой проблемы, потому что техника профессиональная.
Хотя, на профессиональных моделях, допустим на Никоне, там 36 МП в фотоаппарате, и там нет этой проблемы, потому что техника профессиональная.
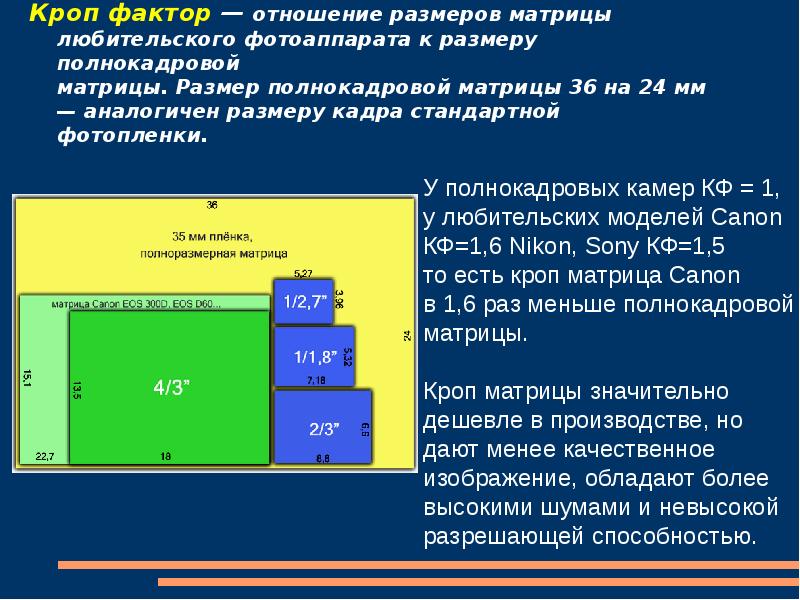
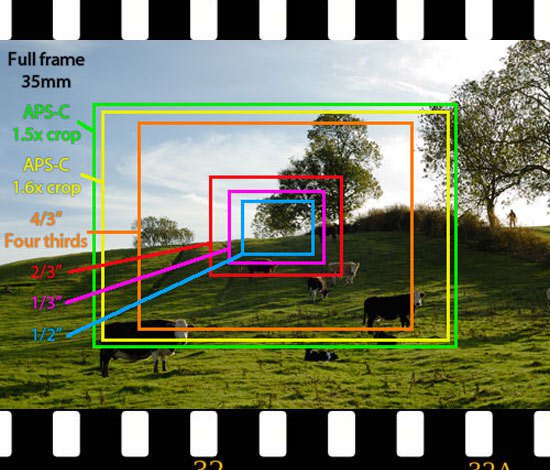
Кроп-фактор
Как вы знаете, есть еще кроп-фактор матрицы. Мы писали об этом недавно в статье. От этого так же зависит размер светочувствительного элемента. По опыту знаю, что в кропе нет ничего плохого. Все дело в том, что вы хотите получить в результате.
Если вы снимаете видео на фотоаппарат, то кроп сделает ваше видео более четким. У меня полнокадровая камера, и не всегда с резкостью все хорошо. И я специально купил камеру с маленькой матрицей, чтобы снимать видео. И видео стало лучше, в плане резкости.
Я знаю многие снимают видео и на полнокадровые фотоаппараты, потому что картинка получается красивее, лучше динамический диапазон. И здесь, опять же, нужно исходить из того, а что нужно вам. Подумайте серьезно над конечной вашей целью, и потом ищите инструменты, которые помогут вам ее решить.
Как почистить
Раз уж мы заговорили о святая святых фотоаппарата — матрице, то будет не лишним сказать и о том как ее чистить. Ведь, наверняка, вы замечали, что со временем на ваших снимках появляются какие-то непонятные точки, пятна, которые вы не можете убрать.
Ведь, наверняка, вы замечали, что со временем на ваших снимках появляются какие-то непонятные точки, пятна, которые вы не можете убрать.
Так загрязняется матрица. На нее попадает пыль, когда вы снимаете объектив. И, конечно, ее нужно чистить время от времени. Я бы посоветовал никогда не чистить ее самому.
Может быть это от того, что у меня был горький опыт в этом. Я подумал, а что такого? Есть же наборы для чистки, и есть инструкции. Взял, да почистил.
Но не тут то было. Матрица — это действительно очень чувствительный элемент не только с точки зрения электроники, но и с физической точки зрения.
Ее нужно чистить только в профессиональных условиях, в специализированных центрах. Тогда вы будете на 100% уверены, что она снова станет идеально чистой. В домашних условиях, к сожалению, этого сделать нельзя.
Заключение
Теперь, дорогие читатели, я думаю, вам стало более понятно что такое матрица и для чего она нужна. Если статья пришлась вам по душе, то предлагаю подписаться на обновления блога.
Это позволит не пропустить другие интересные материалы. Поделившись с друзьями этой статьёй, вы принесёте им пользу. Изучайте основы фотографии, делайте красивые фотографии, приглашайте красивых девушек на свои фотосессии — это очень интересные процесс, который называется жизнь фотографа.
До новых встреч. С вами был Иван.
в чем разница между CMOS, BSI CMOS и Stacked CMOS? — Информационные Технологии на vc.ru
1766 просмотров
Большинство современных цифровых камер для обработки света применяют матрицы, использующие технологию CMOS, но не все матрицы одинаково эффективны. Разобраться в ситуации предлагает Джим Фишер, корреспондент журнала PC Magazine, в котором размещен его обзор КМОП-датчиков, а также приведены их отличия от ПЗС-матриц и чипов Foveon.
Сердцем цифровой камеры является сенсор изображения. Сейчас мы наблюдаем развитие нескольких различных технологий, но в большинстве современных аппаратов используется та или иная версия Complementary Metal-Oxide-Semiconductor, сокращенно CMOS (или КМОП — комплементарная структура металл-оксид-полупроводник). КМОП-чипы имеют некоторые преимущества по сравнению с датчиками с зарядовой связью (ПЗС), распространенными на заре цифровой фотографии. К плюсам CMOS относятся улучшенная энергоэффективность и контроль нагрева, которые проложили путь для видео 4K (и выше) в камерах со сменными объективами.
КМОП-чипы имеют некоторые преимущества по сравнению с датчиками с зарядовой связью (ПЗС), распространенными на заре цифровой фотографии. К плюсам CMOS относятся улучшенная энергоэффективность и контроль нагрева, которые проложили путь для видео 4K (и выше) в камерах со сменными объективами.
Однако существует более одного типа CMOS-датчиков и если вы покупаете новую беззеркальную камеру, можете быть удивлены наличием различных архитектур и возможно не сразу поймете, почему камеры Stacked CMOS стоят намного дороже, чем базовые модели. Разберем, чем отличаются разные варианты CMOS.
Архитектурные различия
По большей части цифровые датчики построены на похожей концепции, даже если есть и различия в конструкции чипа. В имидж-сканере используются светочувствительные фотоэлементы и фильтр с повторяющимися узорами из красных, зеленых и синих квадратов, образующих цвет. В большинстве датчиков используется массив цветных фильтров (CFA) четыре-на-четыре, называемый Bayer CFA (в честь его создателя), но в некоторых моделях Fujifilm используется более сложный X-Trans CFA шесть-на-шесть.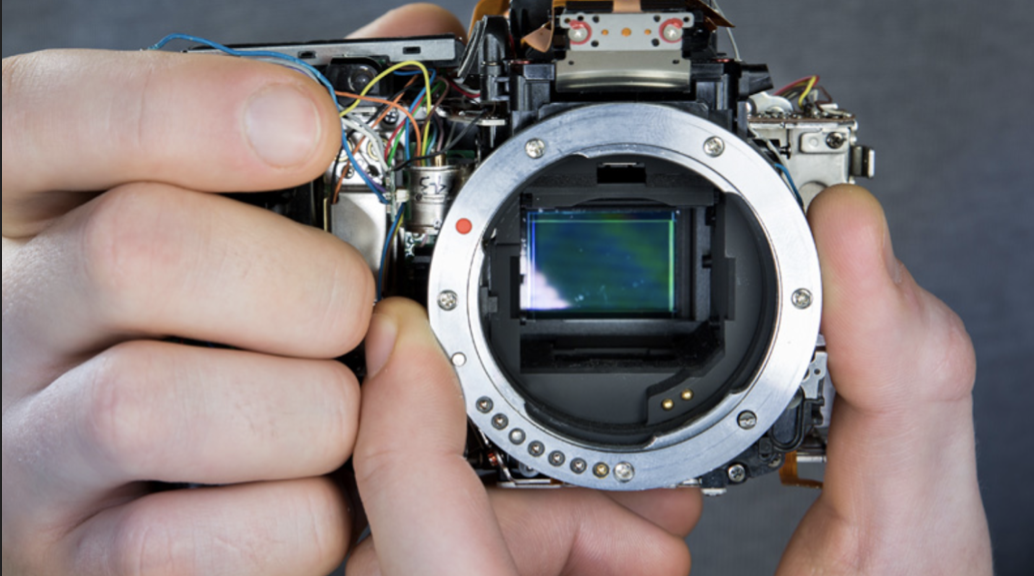
Иллюстрация, показывающая разницу между массивами фильтров для получения цветных фотографий. Bayer CFA (слева) имеет простой повторяющийся рисунок 4х4, а Fujifilm X-Trans (справа) использует сетку 6х6.
Вы также можете столкнуться с датчиками Quad Bayer, типичными для смартфонов (а также экшн-камер и дронов) с огромным количеством пикселей. Эти сенсоры содержат большое количество пикселей (обычно 48 МП), но выдают изображения с более низким разрешением при помощи метода, называемого объединением пикселей. Эта функция пусть немного по-другому, но также внедряется в датчики камер со сменными объективами (ILC). Например, Leica M11 опирается на объединение пикселей для создания фотографий с разрешением 60MP, 36MP или 18MP.
Иллюстрация, показывающая объединение пикселей в более крупные группы.
КМОП-чипы отличаются от ПЗС-матриц предыдущего поколения несколькими важными параметрами. Например, КМОП-чипы считывают данные попиксельно в так называемом вращающемся электронном затворе, а не все сразу, как в ПЗС-матрицах..jpg)
CMOS, BSI CMOS и Stacked CMOS
Существует три основных типа КМОП-сенсоров. Базовый CMOS сегодня используется в камерах начального и среднего уровня, т.е. в моделях, которые получают новейшие функции через пару поколений после того, как они появились в моделях высокого класса.
Усовершенствованная конструкция с задней подсветкой — BSI CMOS, аналогична концепции обычных CMOS, но эти микросхемы располагают компоненты иначе. Фотоэлементы находятся дальше на кристалле, и скорость построчного считывания выше. Это изменение дает практические преимущества — BSI CMOS примерно на диафрагму лучше, если речь идет о шуме изображения. Это означает, что BSI CMOS дает столько же шума при ISO 12800, сколько аналогичный CMOS-чип при ISO 6400. Это также означает, что камеры APS-C и Micro Four Thirds с чипами BSI работают на равных с полнокадровыми CMOS-камерами. Это не жесткие правила, но хорошие ориентиры, которым нужно следовать.
Это означает, что BSI CMOS дает столько же шума при ISO 12800, сколько аналогичный CMOS-чип при ISO 6400. Это также означает, что камеры APS-C и Micro Four Thirds с чипами BSI работают на равных с полнокадровыми CMOS-камерами. Это не жесткие правила, но хорошие ориентиры, которым нужно следовать.
Иллюстрация, показывающая разницу между датчиками CMOS, BSI CMOS и Stacked CMOS. (Приведенные иллюстрации от Bob Al-Greene)
Более высокая скорость считывания делает возможным применить полностью электронный затвор для моделей BSI CMOS, а также обеспечивает быструю реакцию автофокуса для наибольшей скорости серийной съемки с автофокусом. Fujifilm X-T3 была первой потребительской камерой, которая действительно использовала эти функции. Аппарат дебютировал с фокусировкой 20 кадров в секунду с полностью электронным затвором в 2018 году. Хотя вам по-прежнему нужно использовать механический затвор, чтобы надежно “заморозить” движущиеся объекты с большинством CMOS-камер BSI, но бесшумный электронный затвор пригодится для портретной съемки и других неподвижных объектов.
Стекированные (stacked) микросхемы CMOS продвигают концепцию BSI CMOS на шаг вперед. Они размещают компоненты в аналогичном расположении, но конструкция также объединяет процессор сигналов изображения и его сверхбыструю память DRAM в один и тот же кремний. Это делает скорость считывания еще выше. Первая массовая многослойная CMOS-камера, Sony A9 2019 года, произвела фурор, дав возможность фотографировать без перерыва — вы можете использовать ее для съемки фотографий со скоростью 20 кадров в секунду, не теряя из виду свою сцену.
Многослойный CMOS-датчик Nikon Z 9 считывает данные достаточно быстро и исключает необходимость в механическом затворе, что является настоящим достижением для камеры, предназначенной для фиксации движущихся объектов на месте.
Поскольку технология делает этот тип фотографии возможным, чипы Stacked CMOS стали стандартом де-факто для высококлассных ILC, которые профессионалы используют для фотографирования со стороны или пресс-ложи. Мы видели, как некоторые камеры достигают 30 кадров в секунду (Sony A1), а Nikon Z9 справляется с 11-мегапиксельными фотографиями со скоростью 120 кадров в секунду из-за многоярусного чипа и двух процессоров. Сверхбыстрое считывание и вычислительная мощность также улучшают автофокус. Стекированные чипы теперь превосходят датчики BSI CMOS по скорости фокусировки, точности и распознаванию объектов. Все это работает для того, чтобы гарантировать, что стекированные камеры не просто делают кучу фотографий подряд, а делают кучу фотографий в фокусе подряд.
Мы видели, как некоторые камеры достигают 30 кадров в секунду (Sony A1), а Nikon Z9 справляется с 11-мегапиксельными фотографиями со скоростью 120 кадров в секунду из-за многоярусного чипа и двух процессоров. Сверхбыстрое считывание и вычислительная мощность также улучшают автофокус. Стекированные чипы теперь превосходят датчики BSI CMOS по скорости фокусировки, точности и распознаванию объектов. Все это работает для того, чтобы гарантировать, что стекированные камеры не просто делают кучу фотографий подряд, а делают кучу фотографий в фокусе подряд.
Подводя итоги, можно сказать, что чипы CMOS являются основными для современных цифровых камер. Переход на модель с датчиком BSI CMOS повышает скорость считывания и улучшает качество изображения при слабом освещении. А многослойные, т.е. стекированные CMOS-чипы еще больше расширяют диапазон скоростей и сохраняют идеальный обзор объекта, пока камера формирует изображение.
Камеры CCD, Foveon, монохромные и полноспектральные
Ранее мы говорили о ПЗС-сенсорах.
Foveon — это еще один тип сенсора, который используется исключительно в камерах Sigma X3, Merrill и Quattro. Чипы Foveon по-разному записывают цвет с помощью трех светочувствительных слоев, а не массива цветовых фильтров. Положительным моментом является то, что этим камерам не нужно выполнять интерполяцию для заполнения отсутствующих цветов, что означает, что они могут захватывать гораздо больше деталей, чем датчик Байера с аналогичным количеством пикселей. Но есть и недостатки: приложения для обработки Raw не поддерживают файлы от многих камер Foveon, а фотографии показывают очень сильный шум при средних значениях ISO. Сегодня на рынке представлена только одна модель Foveon — Sigma dp Quattro.
Гараж сфотографирован сенсорной камерой Foveon.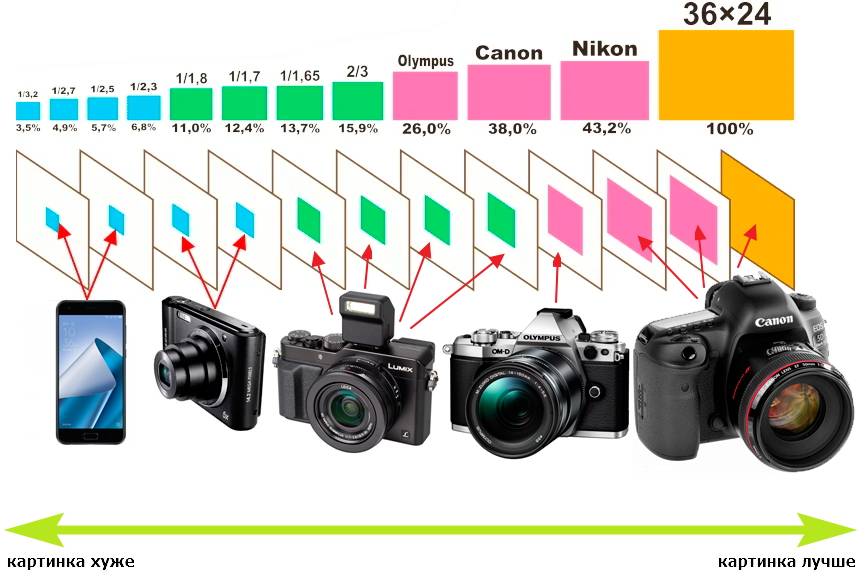 Камера Sigma DP2 Merrill, которая использовалась для этой фотографии, улавливает цвета с помощью трехслойного датчика Foveon.
Камера Sigma DP2 Merrill, которая использовалась для этой фотографии, улавливает цвета с помощью трехслойного датчика Foveon.
В специальных камерах, таких как Leica M10 Monochrom, отсутствует массив цветных фильтров с тем, чтобы запечатлеть мир только в черно-белом цвете.
Черно-белая фотография, сделанная с помощью Leica M10 Monochrom. Фото в зеркале с помощью M10M и послевоенного объектива Elmar 5cm F3.5. (Здесь и выше фото Джима Фишера)
Монохромные камеры — еще один вариант. Leica предлагает несколько специальных опций, которые отказываются от массива цветных фильтров и снимают исключительно черно-белые изображения. M10 Monochrom и Q2 Monochrom мучительно дороги, но специалисты по монохромной печати могут счесть, что они того стоят. Эти камеры демонстрируют преимущество в деталях, как и чипы Foveon, но превосходят параметры цветных снимков при высоких значениях ISO — отключение фильтра Байера почти удваивает количество света, попадающего на матрицу.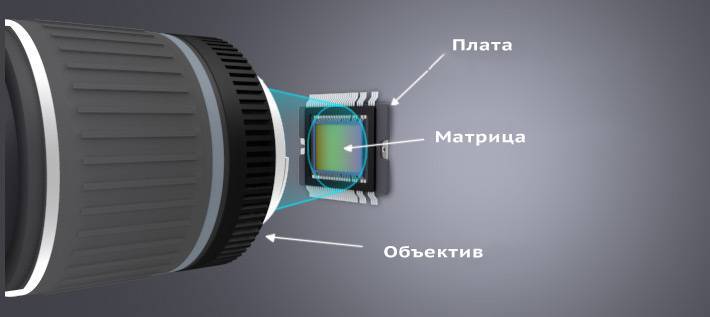
Инфракрасные камеры полного спектра вы не найдете на полке местного магазина, но они существуют. Бытовые камеры имеют фильтр над сенсором, который отсекает невидимый свет. Но такие компании, как KolariVision и MaxMax может удалить этот фильтр или продать вам предварительно переделанную камеру, которая может видеть инфракрасные и ультрафиолетовые волны. Пейзажисты любят использовать эти датчики, чтобы снимать сюрреалистичные, инопланетные сцены прямо на Земле.
Инфракрасный снимок дерева. (Фото: Getty / Justin Reznick Photography)
Камеры, преобразованные для работы в инфракрасном, ультрафиолетовом или полном спектре изображений, захватывают световые волны с длинами волн, в т.ч. невидимыми для глаз.
Заглядывая вперед, Sony Semiconductor Solutions Group разрабатывает многослойную CMOS чип следующего поколения, который изменяет расположение встроенных транзисторов и обещает лучший динамический диапазон и более низкий уровень шума ISO, чем в моделях текущего поколения. Объявление о разработке было сделано в конце 2021 года, но мы рассчитываем подождать несколько лет, прежде чем эта технология появится в камере, которую смогут купить простые смертные.
Объявление о разработке было сделано в конце 2021 года, но мы рассчитываем подождать несколько лет, прежде чем эта технология появится в камере, которую смогут купить простые смертные.
Panasonic также разрабатывает датчик нового типа. Объявленный еще в 2018 году, компания работает над тем, что она называет органическим датчиком, который использует органическую фотопроводящую пленку (Organic Photoconductive Film — OPF) вместо отдельных пикселей для сбора света.
Теперь вы знаете о сенсорах больше и сможете подобрать для себя лучшую из беззеркальных и полнокадровых камер со сменным объективом.
Материал подготовлен дата-центром и веб-студией ITSOFT
Стереокамера — Kornia
Переключить боковую панель оглавления
В этом модуле мы предоставляем StereoCamera , которая содержит функции для работы с горизонтальной установкой стереокамеры.
Предполагается, что установка горизонтальной стереокамеры откалибрована и исправлена таким образом, что установка может быть описана двумя матрицами камеры:
Левая выпрямленная матрица камеры :
\[\begin{split}P_0 = \begin{bmatrix} fx&0&cx&0\ 0 & fy & cy & 0 \\ 0 и 0 и 1 и 0 \end{bmatrix}\end{split}\]
Правая выпрямленная камера Матрица :
\[\begin{split}P_1 = \begin{bmatrix} fx&0&cx&tx*fx\ 0 & fy & cy & 0 \\ 0 и 0 и 1 и 0 \end{bmatrix}\end{split}\]
- где:
-
-
\(fx\) — фокусное расстояние по оси x в пикселях.
-
\(fy\) — фокусное расстояние по оси Y в пикселях.
-
\(cx\) — координата x главной точки в пикселях.
-
\(cy\) — координата y главной точки в пикселях.
-
\(tx\) — горизонтальная базовая линия в метрических единицах.
-
Эти матрицы камеры получаются путем калибровки настройки стереокамеры, которую можно выполнить в OpenCV.
StereoCamera позволяет преобразовывать карты диспаратности в трехмерную геометрию реального мира, представленную облаком точек.
Это делается путем формирования матрицы \(Q\).
Использование модели камеры-обскуры для проекции \([X Y Z 1]\) в мировых координатах на \(uv\) пикселей в левом и правом кадре камеры соответственно:
\[\begin{split}\begin{bmatrix} у \\ в \\ 1 \end{bmatrix} = P_0 * \begin{bmatrix} ИКС \\ Y\\ З \\ 1 \end{bматрица} \\ \begin{bmatrix} у-д \\ в \\ 1 \end{bmatrix} = P_1 * \begin{bmatrix} ИКС \\ Y\\ З \\ 1 \end{bmatrix}\end{split}\]
Где \(d\) — разница между пикселями левого и правого изображения.
Объединив эти два выражения, запишем это как одно матричное умножение
\[\begin{split}\begin{bmatrix} у \\ в \\ у-д \\ 1 \end{bmatrix} = \begin{bmatrix} fx & 0 & cx_{left} & 0 \\ 0 & fy & cy & 0 \\ fx & 0 & cx_ {право} & fx * tx \\ 0 и 0 и 1 и 0 \end{bmatrix} \begin{bmatrix} ИКС \\ Y\\ З \\ 1 \end{bmatrix}\end{split}\]
Теперь из третьей строки вычтите первое и инвертируйте выражение, и вы получите:
\[\begin{split}\begin{bmatrix} у \\ в \\ д\ 1 \end{bmatrix} = \begin{bmatrix} fy*tx&0&0&-fy*cx*tx\ 0&fx*tx&0&-fx*cy*tx\ 0&0&0&fx*fy*tx\ 0 & 0 & -fy & fy * (cx_{слева} -cx_{справа}) \end{bmatrix} \begin{bmatrix} ИКС \\ Y\\ З \\ 1 \end{bmatrix}\end{split}\]
Где \(Q\) равно
\[\begin{split}Q = \begin{bmatrix} fy*tx&0&0&-fy*cx*tx\ 0&fx*tx&0&-fx*cy*tx\ 0&0&0&fx*fy*tx\ 0 & 0 & -fy & fy * (cx_{слева} -cx_{справа}) \end{bmatrix}\end{split}\]
Обратите внимание, что x-координата главной точки в левой и правой камерах \(cx\) может различаться, что здесь принимается во внимание.
Предполагая, что \(fx = fy\), вы можете уменьшить это до:
\[\begin{split}Q = \begin{bmatrix} 1&0&0&-cx\\ 0 & 1 & 0 & -cy \\ 0 & 0 & 0 & fx \\ 0 & 0 & -1/tx & (cx_{left} -cx_{right} / tx) \end{bmatrix}\end{split}\]
Но мы будем использовать общую матрицу \(Q\).
Используя матрицу \(Q\), мы можем получить 3D точки:
\[\begin{split}\begin{bmatrix} ИКС \\ Y\\ З \\ Вт \end{bmatrix} = Q * \begin{bmatrix} у \\ в \\ несоответствие (y, v) \\ г \end{bmatrix}\end{split}\]
- class kornia.geometry.camera.stereo.StereoCamera( rectified_left_camera , rectified_right_camera )[источник]
-
- __init__( rectified_left_camera , rectified_right_camera )[источник]
-
Класс, представляющий установку горизонтальной стереокамеры.
- Параметры
-
-
rectified_left_camera (
Tensor) — Выпрямленная матрица проекции левой камеры формы \((B, 3, 4)\) -
rectified_right_camera (
Tensor) — Выпрямленная матрица проекции правой камеры формы \((B, 3, 4)\)
-
-
свойство Q : факел.
 Тензор
Тензор -
Матрица Q горизонтальной стереоустановки.
Эта матрица используется для преобразования тензора диспаратности в соответствующее облако точек. Обратите внимание, что это в общей форме, которая допускает различные фокусные длины в направлениях x и y.
- Тип возврата
-
Тензор - Возвращает
-
Матрица Q формы \((B, 4, 4)\).
- свойство batch_size : int
-
Вернуть размер партии хранилища.
- Тип возврата
-
Интервал - Возвращает
-
скаляр с размером пакета
- свойство cx_left : torch.Tensor
-
Возвращает x-координату главной точки для левой камеры.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\)
-
свойство cx_right : torch.
 Tensor
Tensor -
Вернуть x-координату главной точки для правой камеры.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\)
- свойство cy : факел.Tensor
-
Возвращает координату Y главной точки.
Обратите внимание, что координата y главных точек считается одинаковым для левой и правой камеры.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\)
- свойство fx : факел.Тензор
-
Возвращает фокусное расстояние в направлении x.
Обратите внимание, что фокусные расстояния выпрямленного левого и правого камеры считаются равными.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\)
-
свойство fy : torch.
 Tensor
Tensor -
Возвращает фокусное расстояние по оси Y.
Обратите внимание, что фокусные расстояния выпрямленного левого и правого камеры считаются равными.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\)
- reproject_disparity_to_3D ( disparity_tensor ) [источник]
-
Преобразование тензора диспаратности в трехмерное облако точек.
- Параметры
-
disparity_tensor (
Tensor) – Тензор несоответствия формы \((B, 1, H, W)\). - Тип возврата
-
Тензор - Возвращает
-
Трехмерное облако точек формы \((B, H, W, 3)\)
- свойство tx : torch.Tensor
-
Горизонтальная базовая линия между двумя камерами.
- Тип возврата
-
Тензор - Возвращает
-
Тензор формы \((B)\)
-
kornia.
 geometry.camera.stereo.reproject_disparity_to_3D( disparity_tensor , Q_matrix )[источник]
geometry.camera.stereo.reproject_disparity_to_3D( disparity_tensor , Q_matrix )[источник] -
Преобразование тензора диспаратности в трехмерное облако точек.
- Параметры
-
-
disparity_tensor (
Tensor) – Тензор несоответствия формы \((B, 1, H, W)\). -
Q_matrix (
Tensor) – Тензор Q-матриц форм \((B, 4, 4)\).
-
- Тип возврата
-
Тензор - Возвращает
-
Трехмерное облако точек формы \((B, H, W, 3)\)
4-мегапиксельная сетевая матричная камера с ИК-башней и встроенным микрофоном
Подробнее
● 1/3″ CMOS с прогрессивной разверткой
● 2688 × 1520 при 30 кадрах в секунду
● Фиксированный объектив 2,8 мм
● Цвет: 0,018 лк @ (F1. 6, AGC ON), 0 лк с ИК
6, AGC ON), 0 лк с ИК
● H.265 , ч .265+, H.264, H.264+
● Три потока
● 120 дБ WDR
● BLC/3D DNR/ROI/HLC
● Дальность ИК-подсветки: до 98 футов (30 м)
● Встроенная карта памяти micro SD/ Слот для карты SDHC/SDXC, до 128 ГБ
● Регулировка по трем осям
● Встроенный микрофон
Видео
Технические характеристики
| Серия камер | Платиновая серия | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Разрешение камеры | 4.0MP | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Камера | IP/сеть | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Корпус камеры | Башня | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Рекомендуемый продукт | № | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Технические характеристики |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Освещение
Освещение  6
6  265/H.264
265/H.264