Основы радиолокации – Основные принципы радиолокации
Динамический диапазон приемника
точка
предельной
чувствительности
точка
начала
насыщения
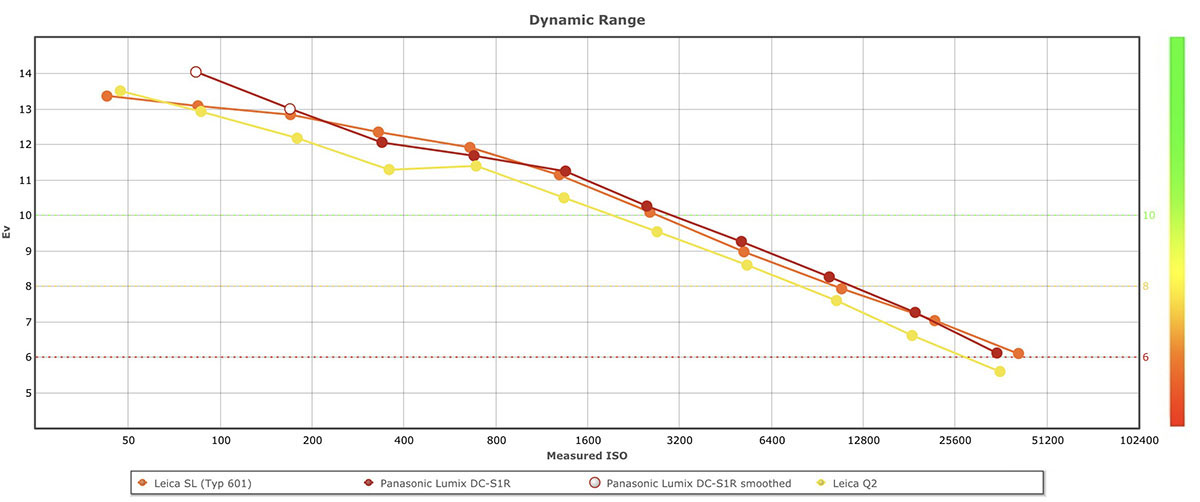
Рисунок 1. Так называемая кривая калибровки приемника: выходной сигнал приемника (по оси Y) как функция от его входного сигнала (по оси Х). Разница между абсциссой точки, в которой начинается насыщение приемника, и абсциссой точки, соответствующей чувствительности приемника, есть динамический диапазон приемника в децибелах (здесь: 118 — 96 = 22 дБ)
точка
предельной
чувствительности
точка
начала
насыщения
Рисунок 1. Так называемая кривая калибровки приемника: выходной сигнал приемника (по оси Y) как функция от его входного сигнала (по оси Х).
Разница между абсциссой точки, в которой начинается насыщение приемника, и абсциссой точки,
соответствующей чувствительности приемника, есть динамический диапазон приемника в
децибелах
(здесь: 118 — 96 = 22 дБ).
Динамический диапазон приемника
Соотношение между максимальной и минимальной возможными мощностями сигналов, которые могут обрабатываться без перегрузки приемника, обозначают термином «динамический диапазон». Формула для определения этого параметра имеет вид:
| D = | Prmax | = значение максимальной мощности сигнала, не приводящее к перегрузке приемника.
= значение минимальной мощности сигнала, при которой на выходе приемника сигнал все еще наблюдается. | |
| Prmin |
Большинство параметров в уравнении дальности радиолокации остаются постоянными в течение периода следования зондирующих сигналов. Существенно могут изменяться только два параметра: эффективная поверхность цели σ и расстояние до цели. Следовательно, для оценки динамического диапазона можно использовать такие крайние значения мощности эхо-сигнала: максимальная мощность – от цели с максимальной эффективной поверхностью и находящейся на минимальной дальности; минимальная мощность – от цели с минимальной эффективной поверхностью и находящейся на максимальной дальности. При этом под минимальной дальностью понимается минимальная дальность действия радиолокатора.
| Pr = | Pt λ2 G2 σ | = k · | σ | (2) |
| (4π)3 · R4 | R4 |
Объединим относительно постоянные составляющие в постоянный коэффициент k
и выразим через него значения максимальной и минимальной возможных мощностей принимаемого сигнала.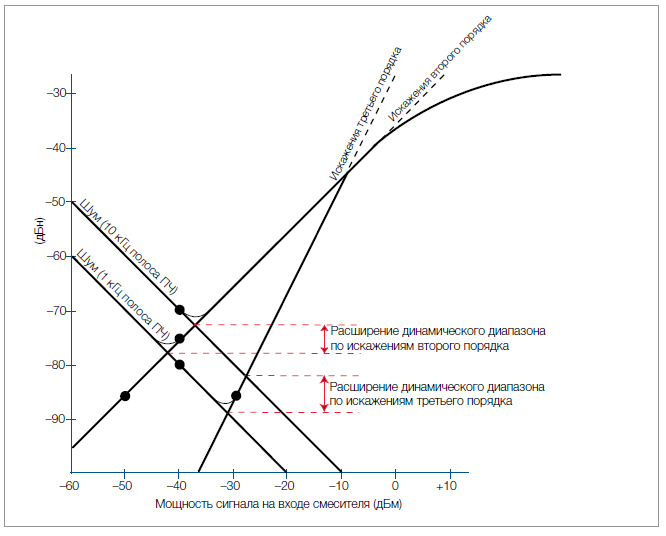 Подставив полученные выражения в формулу для динамического диапазона и сократив одинаковые коэффициенты, получим:
Подставив полученные выражения в формулу для динамического диапазона и сократив одинаковые коэффициенты, получим:
| D = | Prmax | = | k · σmax / R4min | = | σmax · R4max | (3) |
| Prmin | k · σmin / R4max | σmin · R4min |
Используем полученную формулу для оценки требуемого динамического диапазона приемника конкретного радиолокатора с заданными характеристиками.
В качестве примера рассмотрим радиолокатор управления воздушным движением
ASR-E.
Длительность зондирующего сигнала этого радиолокатора составляет 45 мкс
(сигнал с внутриимпульсной модуляцией для зондирования больших дальностей),
что соответствует минимальной дальности действия 6,75 км. Максимальная дальность действия для этого же сигнала определена в 60 морских миль, то есть около 110 км.
Приемник должен обеспечивать прием сигналов от целей с эффективной поверхностью от 0,1 м² (сверхлегкий самолет)
до 100 м² (большой транспортный самолет).
При таких условиях рассчитаем требуемый динамический диапазон приемника:
Максимальная дальность действия для этого же сигнала определена в 60 морских миль, то есть около 110 км.
Приемник должен обеспечивать прием сигналов от целей с эффективной поверхностью от 0,1 м² (сверхлегкий самолет)
до 100 м² (большой транспортный самолет).
При таких условиях рассчитаем требуемый динамический диапазон приемника:
| D = | 100 m² · (110 km)4 | = 7 · 107 ≈ 78,5 dB |
| 0,1 m² · (6,75 km)4 |
Таким образом, требуемый динамический диапазон приемника составляет 78,5 дБ. Это означает, что приемник должен быть способен обрабатывать как наименьшие возможные эхо-сигналы, так и эхо-сигналы, превышающие их по мощности в 70 миллионов раз.
Это не представляется возможным без применения нескольких
специальных схем,
осуществляющих так называемое сжатие динамического диапазона.
Динамический диапазон rtl-sdr • dernasherbrezon
Ниже я сделал перевод одной замечательной заметки Mile Kokotov о динамическом диапазоне rtl-sdr. Это очень важный показатель, которым я заинтересовался и решил разобраться. Возможно кому-нибудь это тоже будет полезно.
Большинство людей думает, что наиболее важной характеристикой радиоприёмника является чувствительность, но это не совсем так. Вообще, спроектировать и произвести приёмник с высокой чувствительностью не проблема. Гораздо сложнее для инженеров спроектировать приёмник с большим динамическим диапазоном, который смог бы принимать как очень слабые сигналы, так и очень сильные одновременно.
Перегрузка приёмника означает то, что он больше не является линейным и сам по себе начинает генерировать сигналы, добавляя шум. Очень сильные сигналы на входе приёмника делают его менее чувствительным, таким образом он больше не может принимать слабые сигналы до тех пор, пока существует сильный сигнал рядом.
Качество sdr приёмника зависит от множества факторов. И одним из наиболее важных параметров, которые напрямую влияют на качество sdr приёмника, является его динамический диапазон.
В общем случае, динамический диапазон — это отношение самого сильного сигнала, который можно принять, к самому слабому.
Для цифровых сигналов динамический диапазон определяется количеством битов в сэмпле: самый сильный сигнал использует все возможные биты, самый слабый — только один бит.
В sdr уровень аналогового сигнала, поступающего в АЦП, может быть отрегулирован (вручную или с помощью АРУ) для того, чтобы максимально эффективно использовать доступный динамический диапазон.
Если аналоговый сигнал слишком сильный, то его нельзя представить соответствующими значениями битов. В таком случае АЦП подставляет максимальное или минимальное значение. Это называется отсечение и с точки зрения обработки сигналов представляет собой форму нелинейного сигнала. При этом появляются фантомные сигналы, которые копируют оригинальный на различных частотах.
В таком случае АЦП подставляет максимальное или минимальное значение. Это называется отсечение и с точки зрения обработки сигналов представляет собой форму нелинейного сигнала. При этом появляются фантомные сигналы, которые копируют оригинальный на различных частотах.
Если аналоговый сигнал слишком слабый, то его присутствие не сможет дать даже одного бита выходного цифрового сигнала. На практике же, более грубое представление цифрового сигнала приводит к потере информации. Эту ситуацию называют шумом квантования.
Динамический диапазон АЦП — это отношение между самым сильным и самым слабым сигналом, которое может быть переведено в цифровой вид без искажений.
Самый сильный сигнал представляет собой максимальный входящий сигнал. Обычно 0dBFS (dBFS означает децибел по отношению к максимальному уровню) — это максимально возможный цифровой сигнал. При этом более слабые сигналы становятся отрицательными. Например, минимальный уровень шума может быть -60dBFS, -80dBFS, -100 dBFS в зависимости от качества sdr приёмника и соотношения сигнал/шум. n\sqrt{\dfrac{3}{2}})
$$
n\sqrt{\dfrac{3}{2}})
$$
Где n — количество бит, SQNR — динамический диапазон.
Согласно формуле динамический диапазон АЦП 8 бит равен ~50dB, 12 бит 74dB и 16 бит 98dB.
Почему же динамический диапазон важен для SDR?
Кто-то может подумать, что достаточно иметь АРУ (автоматическая регулировка усиления), которая поддерживает входной сигнал на необходимом уровне и, поэтому не нужен большой динамический диапазон. Это может сработать, но не стоит забывать что sdr приёмник получает сигнал на АЦП гораздо большей ширины, нежели необходимо. Дополнительная ширина сигнала позволяет получить спектограмму всей доступной полосы частот, но это так же значит, что на АЦП попадает множество энергии, в том числе и от нежелательных частот. Эти частоты могут быть достаточно сильными по сравнению с сигналом, который необходимо получить.
В таком случае, уровень усиления должен быть равен суммарной мощности всего радио сигнала поступающего на АЦП. Это решит проблему “слишком сильного” сигнала, при этом самый слабый сигнал будет определяться динамическим диапазоном. Тем не менее при большом динамическом диапазоне шум квантирования уменьшается, позволяя принимать слабые узкополосные сигналы.
Тем не менее при большом динамическом диапазоне шум квантирования уменьшается, позволяя принимать слабые узкополосные сигналы.
Улучшить качество сигнала можно еще одним способом — используя более узкий аналоговый фильтр. Это позволит сократить входную мощность и позволит усилить сигнал без отсечения. Однако, это работает если sdr имеет встроенный настраиваемый фильтр.
В крайнем случае можно использовать фильтр, равный полосе принимаемого сигнала. Недостатком этого метода является то, что нельзя будет увидеть полный спектр.
Помимо количества бит АЦП, динамический диапазон может зависеть от шума и фантомных сигналов.
Если в приёмнике нет предусилителя, то его динамический диапазон ограничен динамическим диапазоном АЦП. Но если он есть, то динамический диапазон ограничен либо АЦП, либо предусилителем. При этом шум усилителя задаёт минимальный сигнал, который может быть оцифрован.
Динамический диапазон системы должен быть больше соотношения сигнал/шум. Если же он меньше, то входящий сигнал будет искажён приёмником, и узким местом такой системы будет мощность усилителя.
Фантомные сигналы намного более опасны, чем шум. Они имеют гораздо большую амплитуду нежели шум и она не зависит от выбранной полосы пропускания. Эти сигналы появляются в результате нелинейности АЦП. SFDR для АЦП определяется как отношение RMS амплитуды сигнала к RMS амплитуды самого большего фантомного сигнала. SFDR представлен на картинке ниже:
Есть некоторое заблуждение связанное с динамическим диапазоном широкополосных АЦП. Оно заключается в том, что АЦП работающее на 20МГц с динамическим диапазоном 74dB не может быть лучше радиоприёмника с динамическим диапазоном 85dB. Проблема в том, что сравнивается белое с пушистым. Нельзя говорить о динамическом диапазоне не упоминая ширину канала. Для радиолюбительского радио — это ширина приёмника. Она может быть 2400Гц для SSB или 500Гц для морзе.
На самом деле в некоторых sdr приёмниках используется децимация. Процесс децимации заключается в том, что цифровой сигнал, полученный с гораздо большей частотой дискретизации, уменьшается до интересующей частоты дискретизации. В результате динамический диапазон увеличивается за счёт “усиления обработки”. Усиление достигается за счёт того, что удаляется шум вне интересующей полосы частот, тем самым увеличивая соотношение сигнал/шум.
В результате динамический диапазон увеличивается за счёт “усиления обработки”. Усиление достигается за счёт того, что удаляется шум вне интересующей полосы частот, тем самым увеличивая соотношение сигнал/шум.
Например, Если взять 12-битный АЦП, работающий с частотой дискретизации 10МГц, то с помощью децимации можно увеличивать динамический диапазон на 3dB при каждом увеличении децимации в 2 раза:
| Децимация | alias-free bandwidth (Mhz) | Увеличение (dB) | Динамический диапазон (dB) |
|---|---|---|---|
| 0 | 8 | 0 | 74 |
| 2 | 4 | 3 | 77 |
| 4 | 2 | 6 | 80 |
| 8 | 1 | 9 | 83 |
| 16 | 0.5 | 12 | 86 |
| 32 | 0.25 | 15 | 89 |
| 64 | 0.125 | 18 | 92 |
Что такое динамический диапазон радиоприемника » Electronics Notes
Существуют важные для человека параметры, связанные с работой радиоприемника, одним из ключевых параметров является динамический диапазон.
Радиодинамический диапазон Включает:
Что такое динамический диапазон
В современных условиях радиосвязи важен динамический диапазон приемника, поскольку необходимо принимать как сильные, так и слабые сигналы, а также слабые сигналы при наличии сильных.
При наличии огромного количества радиостанций постоянно передается множество сигналов — например, мобильные телефоны должны одновременно принимать как слабые, так и сильные сигналы. Конструкция радиочастотной схемы радиоприемника будет определять факторы, определяющие динамический диапазон, поэтому важно учитывать их на самых ранних стадиях концепции.
Хотя динамический диапазон очень важен для радиоприемников и приложений радиосвязи, он также важен во многих других областях, от фотокамер до аудиомикшеров и многих других устройств, где необходимо учитывать множество различных входных уровней.
Хотя некоторые параметры будут меняться в зависимости от рассматриваемого оборудования, основной концепцией динамического диапазона остается диапазон, в котором оборудование может успешно обрабатывать входящие сигналы.
Что такое динамический диапазон?
Динамический диапазон радиоприемника — это, по сути, диапазон уровней сигнала, в котором он может работать.
Может помочь определение динамического диапазона радио.
Определение динамического диапазона радиоприемника:
Динамический диапазон радиоприемника, вероятно, лучше всего определить как диапазон уровней входного сигнала, в котором радиоприемник может успешно принимать требуемые сигналы.
Существует множество параметров, связанных с динамическим диапазоном приемника, которые важны для приложений радиосвязи всех форм.
Нижний предел диапазона определяется его чувствительностью, тогда как верхний предел определяется перегрузкой или эффективностью обработки сильного сигнала. Тем не менее, существует несколько различных соглашений, которые используются для измерения динамического диапазона приемника.
В спецификациях обычно используются цифры, основанные либо на характеристиках интермодуляции, либо на характеристиках блокировки. К сожалению, не всегда возможно сравнить один набор с другим, потому что динамический диапазон, как и многие другие параметры, может быть указан несколькими способами.
К сожалению, не всегда возможно сравнить один набор с другим, потому что динамический диапазон, как и многие другие параметры, может быть указан несколькими способами.
Понятие о динамическом диапазоне радиоприемника
Однако, чтобы получить представление о том, что именно означает динамический диапазон радиоприемника, стоит рассмотреть способы проведения измерений для определения диапазона радиоприемника.
Чувствительность
Первая характеристика, которую необходимо исследовать, — это чувствительность приемника. Основным ограничивающим фактором в любом радиоприемнике является создаваемый внутренний шум. Для многих приложений радиосвязи используется либо отношение сигнал/шум, либо коэффициент шума.
Однако для спецификаций динамического диапазона часто используется цифра, называемая минимально различимым сигналом (MDS). Обычно это принимается за сигнал, равный по силе уровню шума.
Поскольку уровень шума зависит от используемой полосы пропускания, это также должно быть указано в спецификации. Обычно уровень уровня MDS указывается в дБм, т. е. дБ относительно милливатт, и типичные значения составляют около -135 дБм в полосе пропускания 3 кГц.
Обычно уровень уровня MDS указывается в дБм, т. е. дБ относительно милливатт, и типичные значения составляют около -135 дБм в полосе пропускания 3 кГц.
Обработка сильных сигналов
Хотя чувствительность важна, способ обработки радиоприемником сильных сигналов также очень важен.
Есть несколько спецификаций, которые могут быть важны для спецификаций динамического диапазона:
-
Продукты третьего порядка: Проблемы возникают, когда гармоники внутриполосных сигналов смешиваются друг с другом. Обнаружено, что можно создать комбинацию сигналов, как показано ниже, и они могут просто попадать на ту же частоту, что и слабая и интересная станция, тем самым маскируя ее, чтобы ее нельзя было услышать.
Несложно рассчитать частоты, на которые будут попадать паразитные сигналы. Если входные частоты равны f 1 и f 2 , то полученные новые частоты будут равны 2f 1 — ф 2 , 3ф 1 — 2ф 2 , 4ф 1 — 3ф 2 и так далее.
 На другой стороне двух основных или исходных сигналов продукты производятся по адресам 2f 2 — f 1 , 3f 2 — 2f 2 , 4f 2 — 3f 1 и так далее, как показано на рис. диаграмма. Они известны как интермодуляционные продукты нечетного порядка. Два раза один сигнал плюс один раз другой дают продукт третьего порядка, три раза один плюс два раза другой — продукт пятого порядка и так далее. Из диаграммы видно, что сигналы по обе стороны от основных сигналов являются сначала произведением третьего порядка, затем пятого, седьмого и так далее.
На другой стороне двух основных или исходных сигналов продукты производятся по адресам 2f 2 — f 1 , 3f 2 — 2f 2 , 4f 2 — 3f 1 и так далее, как показано на рис. диаграмма. Они известны как интермодуляционные продукты нечетного порядка. Два раза один сигнал плюс один раз другой дают продукт третьего порядка, три раза один плюс два раза другой — продукт пятого порядка и так далее. Из диаграммы видно, что сигналы по обе стороны от основных сигналов являются сначала произведением третьего порядка, затем пятого, седьмого и так далее. Для примера с реальными цифрами. Если большие сигналы появляются на частотах 30,0 МГц и 30,01 МГц, то интермодуляционные продукты появятся на частотах 30,02, 30,03, 30,4 … МГц и 29,99, 29,98, 29,97 … МГц.
Спектр продуктов интермодуляции от двух сигналов -
Блокировка: Другая проблема, которая может возникнуть при наличии сильного сигнала, называется блокировкой.
 Как следует из названия, сильный сигнал может блокировать или, по крайней мере, снижать чувствительность радиоприемника. Эффект можно заметить, когда слушаешь относительно слабую станцию, и соседний передатчик начинает излучать, а мощность полезного сигнала снижается. Эффект возникает, когда входной ВЧ-усилитель начинает сжиматься. Когда это происходит, самый сильный сигнал имеет тенденцию «захватывать» ВЧ-усилитель, уменьшая мощность других сигналов. Эффект аналогичен эффекту захвата, связанному с FM-сигналами.
Как следует из названия, сильный сигнал может блокировать или, по крайней мере, снижать чувствительность радиоприемника. Эффект можно заметить, когда слушаешь относительно слабую станцию, и соседний передатчик начинает излучать, а мощность полезного сигнала снижается. Эффект возникает, когда входной ВЧ-усилитель начинает сжиматься. Когда это происходит, самый сильный сигнал имеет тенденцию «захватывать» ВЧ-усилитель, уменьшая мощность других сигналов. Эффект аналогичен эффекту захвата, связанному с FM-сигналами. Этот аспект характеристик радиоприемника очень важен для большого числа приложений радиосвязи, от мобильных телефонов до стратегических радиосистем.
Уровень блокировки, очевидно, зависит от уровня сигнала. Это также зависит от того, насколько далеко от канала находится сильный сигнал. Чем дальше, тем больше он будет уменьшен настройкой переднего конца и тем меньше будет эффект. Обычно блокировка определяется как уровень нежелательного сигнала при заданном смещении (обычно 20 кГц), что дает снижение усиления на 3 дБ.

-
Точка пересечения: В идеальном мире выход ВЧ-усилителя был бы пропорционален входу для всех уровней сигнала. Однако ВЧ-усилители имеют только ограниченную выходную мощность, и обнаружено, что за пределами определенного уровня выходной сигнал падает ниже требуемого уровня, потому что он не может справиться с требуемыми от него большими уровнями. Это дает характеристику, подобную показанной ниже. Из этого видно, что ВЧ-усилители являются линейными в нижней части характеристики, но поскольку выходные каскады не могут работать с более высокими уровнями мощности, сигналы начинают сжиматься, как видно из кривой характеристики.
Характеристическая кривая усилителя, показывающая область перегрузкиТот факт, что ВЧ-усилитель является нелинейным, сам по себе не создает серьезной проблемы. Однако побочные эффекты есть. Когда сигнал проходит через нелинейный элемент, наблюдаются два основных эффекта. Во-первых, генерируются гармоники. К счастью, они вряд ли вызовут серьезную проблему.
 Чтобы гармоника находилась рядом с принимаемой частотой, в ВЧ-усилитель должен поступить сигнал с половинной частотой принимаемого сигнала. Настройка переднего конца должна уменьшить это в достаточной степени, чтобы в большинстве случаев это не было заметной проблемой.
Чтобы гармоника находилась рядом с принимаемой частотой, в ВЧ-усилитель должен поступить сигнал с половинной частотой принимаемого сигнала. Настройка переднего конца должна уменьшить это в достаточной степени, чтобы в большинстве случаев это не было заметной проблемой. Другая проблема, которую можно заметить, заключается в том, что сигналы смешиваются вместе, образуя нежелательные продукты. Это опять же вряд ли вызовет проблемы, поскольку любые сигналы, которые могут смешиваться друг с другом, должны быть в достаточной степени удалены настройкой внешнего интерфейса. Вместо этого проблемы возникают, когда гармоники внутриполосных сигналов смешиваются вместе.
Характеристики динамического диапазона
При рассмотрении спецификаций динамического диапазона следует соблюдать осторожность при их интерпретации. MDS на нижнем конце сигнала следует рассматривать внимательно, но ограничивающие факторы на верхнем конце показывают гораздо большие различия в том, как они определены.
При использовании блокировки обычно указывается снижение чувствительности на 3 дБ, но в некоторых случаях может использоваться 1 дБ. Там, где интермодуляционные продукты выбираются в качестве предельной точки, уровень входного сигнала для них часто берется таким же, как у MDS. Однако, какие бы спецификации ни были даны, следует соблюдать осторожность при интерпретации цифр, поскольку они могут незначительно различаться по способу измерения от одного приемника к другому.
Чтобы получить представление о цифрах, которые могут быть получены, когда интермодуляция является ограничивающим фактором от 80 до 9Диапазон 0 дБ является типичным, а там, где блокировка является ограничивающим фактором, цифры около 115 дБ обычно достигаются в хорошем радиоприемнике, используемом для профессиональных приложений радиосвязи.
Разработка для оптимального динамического диапазона
Непростая задача разработать высокочувствительный радиоприемник с широким динамическим диапазоном. Конструкция радиочастотной цепи требует тщательного баланса многих различных параметров для получения оптимальных характеристик. Однако это важное требование для многих систем радиосвязи, особенно там, где устройства мобильной радиосвязи могут располагаться в непосредственной близости друг от друга.
Конструкция радиочастотной цепи требует тщательного баланса многих различных параметров для получения оптимальных характеристик. Однако это важное требование для многих систем радиосвязи, особенно там, где устройства мобильной радиосвязи могут располагаться в непосредственной близости друг от друга.
Для достижения требуемого уровня производительности можно использовать ряд методов.
- Шумовые характеристики входной части: Конструкция радиочастотной схемы входной части радиоприемника является наиболее важной с точки зрения шумовых характеристик. Он должен быть оптимизирован по шумовым характеристикам, а не по усилению. Согласование входного импеданса имеет решающее значение для этого. Интересно отметить, что оптимальное согласование не соответствует в точности наилучшей шумовой характеристике. Электронные компоненты, включая активное устройство, следует выбирать по их шумовым характеристикам.
- Выходная мощность входного каскада: У усилителя входного каскада также должна быть относительно высокая выходная мощность, чтобы исключить его перегрузку.
 Конструкция ВЧ должна обеспечивать достаточную выходную мощность, не создавая при этом высокого уровня шума.
Конструкция ВЧ должна обеспечивать достаточную выходную мощность, не создавая при этом высокого уровня шума. - Микшер высокого уровня: Работа микшера является одним из ключевых электронных компонентов, обеспечивающих хороший динамический диапазон и устойчивость к перегрузкам. Радиочастотная конструкция радиоприемника должна гарантировать, что микшер не будет перегружен. Для этого не должно предшествовать чрезмерное усиление. Также следует использовать смеситель высокого уровня (т. е. предназначенный для приема сигнала гетеродина высокого уровня). Таким образом, он может выдерживать высокие входные сигналы без снижения производительности.
- Более поздние этапы приемника: Конструкция радиочастотной цепи должна обеспечивать, чтобы более поздние этапы приемника могли выдерживать уровни сигналов, которые могут возникнуть при приеме сильных сигналов. Относительно легко рассчитать максимальные уровни сигналов, возникающие в каждой ступени приемника, а затем убедиться, что они могут быть учтены радиочастотной конструкцией.
 На этих этапах шумовые характеристики не так важны, и поэтому можно использовать высокие уровни тока для обеспечения требуемых уровней сигнала.
На этих этапах шумовые характеристики не так важны, и поэтому можно использовать высокие уровни тока для обеспечения требуемых уровней сигнала. - Автоматическая регулировка усиления: Включение хорошей системы АРУ в конструкцию ВЧ также помогает предотвратить перегрузку и генерацию нежелательных паразитных сигналов. Подавая напряжение, зависящее от уровня сигнала, на некоторые из более ранних каскадов приемника, можно гарантировать, что последние каскады ВЧ-схемы не будут перегружены. Схема схемы АРУ может стать довольно сложной, поскольку могут потребоваться различные постоянные времени в контуре АРУ для обеспечения оптимального управления для различных типов модуляции: AM, SSB и т. д.
Это лишь некоторые из вопросов, которые следует учитывать при проектировании радиочастотной схемы любого приемника, требующего характеристик с высоким динамическим диапазоном.
Радиоприемник, будь то традиционный радиоприемник для приема коротких волн или мобильный телефон, или любой другой вид приемника, сможет лучше работать в сложных условиях, если он имеет хорошие характеристики динамического диапазона.
Несмотря на то, что чувствительность требуется для многих приложений, от нее мало толку, если сильные соседние передачи как по частоте, так и по местоположению означают, что чувствительность не может быть реализована.
Другие основные темы радио:
Радиосигналы
Типы и методы модуляции
Амплитудная модуляция
Модуляция частоты
OFDM
ВЧ микширование
Петли фазовой автоподстройки частоты
Синтезаторы частоты
Пассивная интермодуляция
ВЧ аттенюаторы
ВЧ-фильтры
РЧ циркулятор
Типы радиоприемников
Суперхет радио
Избирательность приемника
Чувствительность приемника
Приемник с сильным сигналом
Динамический диапазон приемника
Вернуться в меню тем радио. . .
Что такое динамический диапазон и SFDR в радиочастоте?
Что такое динамический диапазон?
Динамический диапазон — это максимальный уровень входного сигнала, допустимый для приемника, разделенный на минимальный уровень входного сигнала, который определяется как чувствительность. Динамический диапазон равен максимальной мощности сигнала над минимальной мощностью сигнала на входе системы. Преобразовывая это в логарифмическую область, мы получаем разницу между максимально допустимой мощностью P sig, in(max) в dBm и минимально допустимая мощность P sig(min) .
Динамический диапазон равен максимальной мощности сигнала над минимальной мощностью сигнала на входе системы. Преобразовывая это в логарифмическую область, мы получаем разницу между максимально допустимой мощностью P sig, in(max) в dBm и минимально допустимая мощность P sig(min) .
Как указано в предыдущем разделе, чувствительность в радиочастоте, минимальная допустимая мощность, определяется P чувствительностью . Поэтому, как показано на рисунке ниже, мы не можем уменьшить уровень мощности входного сигнала меньше, чем значение P sig(min) ; в противном случае сигнал не будет обнаружен. Точно так же существует верхний предел, при котором мы не можем увеличить мощность сигнала больше, чем это значение.
Аналогичное условие было замечено в разделе нелинейность , где было указано, что нам не разрешено увеличивать нашу амплитуду больше, чем определенное значение; в противном случае в системе произойдет компрессия усиления, и это значение равно A- 1 дБ или A 1 дБ .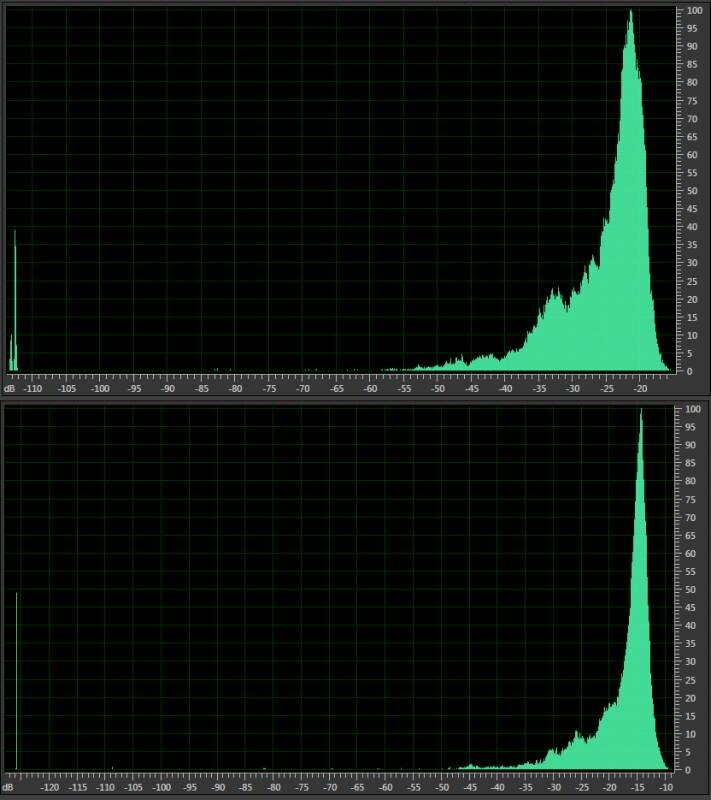
Аналогично можно сказать, что P sig(max), максимальный уровень мощности сигнала, равен мощности 1 дБ. Если входная мощность увеличится больше, чем это значение, то в системе произойдет сжатие, она станет нелинейной и не будет работать должным образом. Таким образом, динамический диапазон в логарифмической области определяется как разница между максимальной мощностью сигнала и минимальной мощностью сигнала.
Побочный свободный динамический диапазон (SFDR)?
Теперь мы анализируем динамический диапазон с помехой, существующей в системе. Взаимосвязь между шумом источника помех включена в определение SFDR. Как показано на рисунке выше, нижним пределом минимальной мощности сигнала является чувствительность P . Верхним пределом здесь является максимальная мощность источника помех, но при некоторых условиях. SFDR — это разница между этими двумя максимальными и минимальными значениями. Максимальная мощность помехи P int(max) может быть определено как максимальное ограничение мощности для системы, когда интермодуляционная интермодуляционная составляющая (IM) 3-го порядка, относящаяся к входному сигналу, не превышает минимального уровня шума.
Что такое продукт обмена мгновенными сообщениями, ориентированный на вход?
У нас на входе помехи, и из-за нелинейности в нашем канале появится произведение ИМ 3-го порядка, и оно заблокирует сигнал.
Выход IM3 или произведение IM третьего порядка (A o, IM3 ) на выходе может называться входом блока усилителя (это может быть любой блок, система или целая система), поэтому A в, IM3 называется входным предпочтительным продуктом IM. Мы должны быть осторожны, чтобы отметить, что это просто сравнение, так как A in, IM3 не существует физически, у нас действительно нет такого сигнала. Однако на выходе реально A o, IM3 , который выполняет роль блокиратора, но у нас нет A в, IM3. Таким образом, чтобы определить SFDR, мы должны сделать здесь такое определение, сопоставив выход IM3 со входом.
Если мы вычтем прирост мощности в логарифмической области из выходной мощности продукта IM, мы сможем найти входную мощность продукта IM, отнесенного к входу.
SFDR: Если мы увеличим мощность больше, чем значение Pint(max), мощность продукта интермодуляции, связанного с входом, увеличится больше, чем минимальный уровень шума, чего мы не хотим. Мы хотим, чтобы мощность была меньше или равна минимальному уровню шума. Таким образом, это определяет верхний предел SFDR. Таким образом, соотношение между максимальной и минимальной мощностью с точки зрения усиления мощности будет следующим:
Нахождение SFDR для системы
Мы можем найти IIP3 с точки зрения входной амплитуды и выходной амплитуды помех и произведения интермодуляционных помех на выходе, и уравнение будет:
Используя приведенное выше уравнение, мы можем найти входную мощность источника помех через мощность IIP3 и приведенную к входу мощность IM3. Когда P in, int является максимальным, приведенная к входу мощность IM3 не должна превышать минимальный уровень шума.
Пример вопроса для SFDR:
Найдите SFDR для приемника GSM с SNRout(min) = 12 дБ, полосой пропускания канала 200 кГц, PIIP3 = 15 и коэффициентом шума 9 дБ.