Динамический диапазон входного сигнала — это… Что такое Динамический диапазон входного сигнала?
- Динамический диапазон входного сигнала
-
37. Динамический диапазон входного сигнала
Отношение значений входных сигналов, соответствующих наибольшему и наименьшему значениям выходного сигнала для средства измерений
Словарь-справочник терминов нормативно-технической документации. academic.ru. 2015.
- динамический диапазон
- Динамический диапазон выходного сигнала
Смотреть что такое «Динамический диапазон входного сигнала» в других словарях:
динамический диапазон входного сигнала — Отношение значений входных сигналов, соответствующих наибольшему и наименьшему значениям выходного сигнала для средства измерений.
 [ГОСТ 24453 80] динамический диапазон [Интент] Тематики измерение лазерного излучения Синонимы динамический… … Справочник технического переводчика
[ГОСТ 24453 80] динамический диапазон [Интент] Тематики измерение лазерного излучения Синонимы динамический… … Справочник технического переводчикадинамический диапазон входного сигнала запоминающей электронно-лучевой трубки — Отношение входных сигналов, соответствующих максимальному и минимальному выходным сигналам запоминающей электронно лучевой трубки, которые могут быть получены. [ГОСТ 17791 82] Тематики электровакуумные приборы EN dynamic range of cathode ray… … Справочник технического переводчика
динамический диапазон — 2.23 динамический диапазон (dynamic range): Разность, выраженная в дБ, между значениями сигнала (либо отношение значений сигнала), при которых происходит перегрузка усилителя, и уровнем шумов либо уровнем, заданным конструкцией усилителя.… … Словарь-справочник терминов нормативно-технической документации
динамический диапазон электронного усилителя — динамический диапазон Отношение максимальной амплитуды входного сигнала электронного усилителя, при которой искажения сигнала достигают предельно допустимого значения, к чувствительности усилителя.
[ГОСТ 24375 80] Тематики радиосвязь Обобщающие… … Справочник технического переводчика
динамический диапазон для входного сигнала дифференциального усилителя — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN differential input voltage range … Справочник технического переводчика
динамический диапазон радиоприемника — Отношение уровня максимальной мощности входного сигнала в полосе пропускания радиоприемника к пороговой чувствительности радиоприемника или отношение уровня мешающего сигнала в побочном канале при заданных виде и величине нелинейных переходов из… … Справочник технического переводчика
динамический диапазон (сейсмического канала записи) — Величина, равная отношению максимального входного сигнала сейсмического канала записи к уровню собственных шумов.
 [ГОСТ 16821 91] Тематики сейсморазведка … Справочник технического переводчика
[ГОСТ 16821 91] Тематики сейсморазведка … Справочник технического переводчикаДинамический диапазон (техника) — У этого термина существуют и другие значения, см. Динамический диапазон. Динамический диапазон характеристика устройства или системы, предназначенной для преобразования, передачи или хранения некой величины (мощности, силы, напряжения, звукового… … Википедия
Динамический диапазон (в технике) — Динамический диапазон характеристика устройства или системы, предназначенной для преобразования, передачи или хранения некой величины (мощности, силы, напряжения, звукового давления и т. д.), представляющая логарифм отношения максимального и… … Википедия
Динамический диапазон радиоприемника — 1. Отношение уровня максимальной мощности входного сигнала в полосе пропускания радиоприемника к пороговой чувствительности радиоприемника или отношение уровня мешающего сигнала в побочном канале при заданных виде и величине нелинейных переходов… … Телекоммуникационный словарь
Электроника НТБ — научно-технический журнал — Электроника НТБ
Динамический диапазон –проблема определения
Одна из важнейших характеристик системы динамических измерений – динамический диапазон. Если он слишком узок, сильные сигналы ограничиваются и искажаются, а слабые тонут в собственном шуме системы. Шум – неотъемлемый атрибут электронных схем, предназначенных для усиления и формирования сигналов от первичных измерительных преобразователей. Максимальное расширение динамического диапазона – задача первоочередной важности в приборостроении, поскольку от этого зависит возможность точного одновременного измерения как слабых, так и сильных сигналов.
Если он слишком узок, сильные сигналы ограничиваются и искажаются, а слабые тонут в собственном шуме системы. Шум – неотъемлемый атрибут электронных схем, предназначенных для усиления и формирования сигналов от первичных измерительных преобразователей. Максимальное расширение динамического диапазона – задача первоочередной важности в приборостроении, поскольку от этого зависит возможность точного одновременного измерения как слабых, так и сильных сигналов.
Восприятие данной характеристики осложняется тем, что производители определяют и измеряют ее по-разному. Их можно понять. Ведь общепринятой технической формулировки, раскрывающей содержание динамического диапазона, не существует. В общем случае он расплывчато характеризуется как отношение наибольшего и наименьшего значений сигнала, которые система способна точно измерить в один и тот же момент времени. Такое определение вызывает несколько вопросов.
Что значит «в один и тот же момент времени»? Сравниваем амплитуды синхронизированных слабого и сильного сигналов или рассматриваем несинхронизированные сигналы в один и тот же момент времени, но в разных фазах (в этом случае разница их уровней будет значительно изменяться со временем)?
Что значит «наибольшее значение сигнала»? Известны три общеупотребительные меры наибольшего значения сигнала, и каждая из них уместна в определенном контексте:
размах амплитуды (peak-to-peak, full-scale range) – разность между двумя крайними значениями сигнала;
амплитуда (zero-to-peak) – разность между средним и амплитудным значениями сигнала;
действующее значение (RMS full-scale) – среднеквадратичное значение сигнала (для синусоидального сигнала составляет 0,707 от его амплитуды).
Что значит «наименьшее значение сигнала»? Уровень шума? Рассматривается узкая фиксированная полоса частот или же вся полоса пропускания устройства? Это важно, поскольку измеренный среднеквадратичный уровень шума зависит от полосы частот, в которой он измеряется.
Для правильной интерпретации паспортного значения динамического диапазона необходимо разобраться в этих вопросах и выяснить, как производитель измеряет величину, чтобы можно было сравнивать между собой разные устройства.
Динамический диапазон относительно максимального уровня сигнала
При испытаниях своих приборов – анализатора сигналов CoCo-80 (рис.1) и виброконтроллеров Spider 81/81b/80x (рис.2) – компания Crystal Instruments применяет одно из наиболее распространенных определений – динамический диапазон относительно максимального уровня сигнала (dBFS), измеряемый в децибелах (дБ):
,
где VFS – максимальный размах амплитуды измеряемого сигнала, VN – действующее значение напряжения собственного шума системы (обычно измеряется с заглушенным входом и заземлением).
В системе регистрации данных dBFS представляет собой частотно-зависимую переменную величину: чем шире полоса пропускания прибора, тем уже динамический диапазон (меньше значение dBFS). Объясняется это тем, что для шума обычно характерно равномерное распределение спектральной плотности мощности. Поэтому, чем шире участок спектра, на котором рассчитывается действующее значение напряжения шума VN, тем больше это значение. Соответственно, можно искусственно завысить dBFS, сузив полосу частот, в которой выполняется измерение.
Параметр dBFS измеряется либо во временной, либо в частотной области, при этом результаты измерений будут неодинаковыми. В первом случае знаменатель формулы dBFS представляет собой среднеквадратичное значение шумового сигнала в широкой полосе частот, а во втором – мощность шумового сигнала на конкретных частотах. Если распределение спектральной плотности мощности шума в системе равномерное, то в частотной области значение VN будет ниже, а dBFS – выше.
Измерение dBFS во временной области
Рассмотрим измерение dBFS во временной области на примере прибора CoCo-80. Сначала на его вход было подано синусоидальное напряжение амплитудой 10 В, что соответствует максимальному уровню входного сигнала (рис.3). Затем во время регистрации этого сигнала вход прибора был отсоединен и на него установлена заглушка. Соответственно, во второй части сигналограммы регистрировался только собственный шум системы.
Сначала на его вход было подано синусоидальное напряжение амплитудой 10 В, что соответствует максимальному уровню входного сигнала (рис.3). Затем во время регистрации этого сигнала вход прибора был отсоединен и на него установлена заглушка. Соответственно, во второй части сигналограммы регистрировался только собственный шум системы.
С помощью программного обеспечения было определено действующее значение шума – 1,81 мкВ. Следовательно, для динамического диапазона получаем:
.
Описанное выше измерение было повторено при различных частотах дискретизации, в результате были получены значения действующих напряжений шума и dBFS (см. таблицу). Как видно из таблицы, dBFS зависит от частоты дискретизации.
Измерение dBFS в частотной области
Теперь рассмотрим уровень собственного шума прибора в частотной области. В этом режиме можно воспользоваться функцией автоматического измерения спектральной плотности мощности с градуировкой отсчетной шкалы в децибелах относительно максимального уровня сигнала.
При установленной на входе прибора 50-омной заглушке уровень собственных шумов прибора оказывается ниже –150 дБ (рис.4). Автоматическое измерение спектральной плотности мощности было выполнено на основе метода БПФ по 4096 точкам с 64-кратным усреднением спектра.
Как видим, при измерении в частотной области значение dBFS оказывается выше, чем во временной области. Это связано с тем, что в первом случае синусоидальный сигнал максимальной амплитуды сравнивается с собственным шумом на отдельных частотах, а не с суммарным шумом во всей полосе пропускания. Во временной области синусоидальный сигнал амплитудой 1 мкВ потонул бы в шуме, а в частотной области он оказывается виден после усреднения.
Подводя итоги, можно сказать, что динамический диапазон – понятие расплывчатое и числовое значение этой характеристики различается в зависимости от метода ее измерения.
Как достигается широкий динамический диапазон?
Столь широкий динамический диапазон в устройствах компании Crystal Instruments достигается за счет применения уникальной патентованной технологии с использованием двух аналого-цифровых преобразователей (АЦП) в каждом измерительном канале (рис.5).
Упрощенно эту технологию можно описать следующим образом. Входной сигнал направляется параллельно в два канала. В первом стоит усилитель с малым коэффициентом усиления, а во втором – с очень большим (например, 1024). В каждом канале есть АЦП. После аналого-цифрового преобразования сигналы поступают в цифровой сигнальный процессор, который их обрабатывает и собирает в единый сигнал. При этом, если входной сигнал после усиления оказывается в пределах диапазона второго канала, в качестве выходного выбирается сигнал из этого канала. В противном случае на выход поступает сигнал из первого канала.
В противном случае на выход поступает сигнал из первого канала.
Благодаря широкому динамическому диапазону каждого входа, обеспечиваемому описанной технологией, необходимость в настройке чувствительности (диапазона входных напряжений) практически отпадает.
Динамический диапазон и уровни — Энциклопедия по машиностроению XXL
ДИНАМИЧЕСКИЙ ДИАПАЗОН И УРОВНИ [c.36]Динамический диапазон и уровни [c.45]
В первом порядке оказывается только около 10% света, во втором — около 2% и т. д. Будучи однажды прокалибрована для различных порядков, грубая решетка пригодна для приближенных измерений интенсивности в очень широком динамическом диапазоне и оказывается чрезвычайно полезным устройством для ослабления амплитуды лазерного пучка до уровня, соответствующего чувствительности приемника. [c.26]
Основные параметры микрофонов номинальный диапазон частот, модуль полного электрического- сопротивления, чувствительность по свободному полю, типовая частотная характеристика чувствительности, характеристика направленности, перепад чувствительности, фронт тыл, коэффициент гармоник, динамический диапазон, разность уровней чувствительности стереофонической системы.
 Эти, а также и другие параметры микрофонов нормированы ГОСТ 6495—84 Микрофоны, общие технические условия . В ГОСТ 16123-84 приведены термины и их определения. ГОСТ 6495—84 распространяется на динамические и конденсаторные микрофоны, используемые в системах звукозаписи, звукопередачи, звукоусиления и служебной связи в радиоэлектронной аппаратуре бытового и профессионального назначения.
[c.62]
Эти, а также и другие параметры микрофонов нормированы ГОСТ 6495—84 Микрофоны, общие технические условия . В ГОСТ 16123-84 приведены термины и их определения. ГОСТ 6495—84 распространяется на динамические и конденсаторные микрофоны, используемые в системах звукозаписи, звукопередачи, звукоусиления и служебной связи в радиоэлектронной аппаратуре бытового и профессионального назначения.
[c.62]Следующим устройством в микшерном пульте является индивидуальный регулятор. С помощью этих регуляторов звукорежиссер осуществляет наиболее важные операции по созданию звукового образа (регулирование уровня, нахождение оптимального соотношения звучания отдельных источников, регулировку динамического диапазона и т. д.). Индивидуальные (ИР) и общие (ОР) регуляторы уровня совместно со сборной шиной представляют собой смесительное устройство. Отсюда пошло название самого микшерного пульта как устройства, предназначенного для мик-тирования или, иными словами, для смешивания сигналов. На практике часто и сами регуляторы называют микшерами, подчеркивая, что их основное назначение — смешивать сигналы.
[c.184]
На практике часто и сами регуляторы называют микшерами, подчеркивая, что их основное назначение — смешивать сигналы.
[c.184]
При прослушивании программ нередко при малых уровнях сигнала, и особенно паузах музыкального произведения, заме- п мешающий шум. Чтобы расширить динамический диапазон и уменьшить шумы воспроизведении, конструкторы создают [c.59]
Акустические свойства ленты могут быть определены путем применения относительного смещения, чтобы максимальный выходной уровень на частоте 8 кГц был на 10 дБ ниже уровней на частотах 315 и 333 Гц (первая частота соответствует уровню, при котором интермодуляционные искажения составляют 20%—сжатие сигнала около 2 дБ, вторая — уровню, где искажения третьей гармоники равны 5%). Затем следует определить динамический диапазон и чувствительность, а при необходимости и отношение сигнал-шум ленты. [c.301]
Так как измерители уровня предназначены и для контроля напряжения в трактах звуковой частоты, то к ним предъявляются те же технические требования, что и к обычным электронным приборам для измерения напряжения нормируются чувствительность и входное сопротивление, тип шкалы и точность градуировки, рабочий диапазон частот и погрешность в зависимости от частоты, динамический диапазон и др.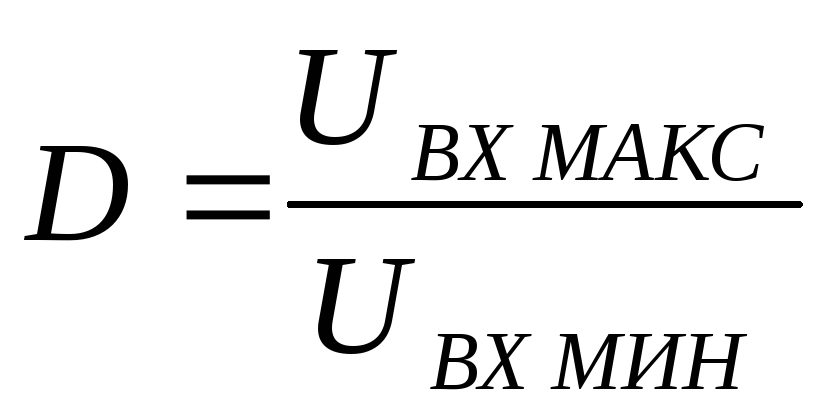 Но в отличие от обычных приборов ИУ контролируют уровни нестационарных сигналов. Поэтому основными техническими характеристиками для ИУ являются динамические (временные).
[c.203]
Но в отличие от обычных приборов ИУ контролируют уровни нестационарных сигналов. Поэтому основными техническими характеристиками для ИУ являются динамические (временные).
[c.203]
Время возврата для ИУ обоих типов нормируется различно. Для приборов первого типа оно должно составлять (1,7+0,3) с, для приборов второго типа (3+1) с. Это объясняется их различным назначением. Чем больше время возврата, тем более завышены показания ИУ для сигналов низкого уровня, следующих после сигналов высоких уровней. Показания приборов первого типа с временем возврата 1,7 с более точно отражают минимальные уровни и соответственно динамический диапазон измеряемых уровней. Это очень важно, так как такие приборы предназначены прежде всего для звукорежиссеров, одной из основных функций [c.204]
Важным параметром ИУ является динамический диапазон измеряемых уровней. Приборы первого типа должны иметь большой динамический диапазон —40…-1-4 дБ или —50. ..-1-5 дБ. Участок школы —50…О дБ называется рабочим, а 0…5 дБ — участком перегрузки. Такого динамического диапазона вполне достаточно, хотя в последнее время и появились ИУ отечественного и венгерского производства с диапазоном —60…-1-5 дБ (в соответствии с требованиями МЭК 268-10А).
[c.205]
..-1-5 дБ. Участок школы —50…О дБ называется рабочим, а 0…5 дБ — участком перегрузки. Такого динамического диапазона вполне достаточно, хотя в последнее время и появились ИУ отечественного и венгерского производства с диапазоном —60…-1-5 дБ (в соответствии с требованиями МЭК 268-10А).
[c.205]
Для задач динамического анализа и синтеза, связанных с исследованием и устранением критических ситуаций в пусковом диапазоне рассматриваемых систем с ограниченным возбуждением, целесообразно построить мажорантную оценку максимального уровня нестационарных колебаний при прохождении двигателем резонансной области. Запишем первое уравнение системы [c.161]
С другой стороны, если задаться требуемыми уровнями вероятностей применения, то из (1) и (2) можно определить требования к динамическому диапазону ИПП, погрешности и к их количеству, необходимым для наиболее эффективной организации сбора экспериментальных данных при испытаниях ПР. Подробнее данные вопросы рассмотрены в указанной работе (см. сноску на с. 164). В дальнейшем при разработке технических требований к ИПП для испытаний ПР эти распределения и их особенности учитывались в первую очередь. Для эффективного использования ИПП необходимо также рассматривать частотный диапазон измеряемых параметров. Общие частотные диапазоны перечисленных выше параметров, характерные для современных ПР, сравнительно небольшие (до 300 Гц — кинематические и до 10 Гц — силовые), а интегральные распределения ширины спектра процесса внутри этих диапазонов могут быть представлены выражением вида (1). Поэтому распределения внутри этих диапазонов для различных параметров не рассматриваются, так как большинство известных конструкций ИПП позволяют перекрыть его полностью одним, двумя типами датчиков с различными частотными характеристиками.
[c.168]
сноску на с. 164). В дальнейшем при разработке технических требований к ИПП для испытаний ПР эти распределения и их особенности учитывались в первую очередь. Для эффективного использования ИПП необходимо также рассматривать частотный диапазон измеряемых параметров. Общие частотные диапазоны перечисленных выше параметров, характерные для современных ПР, сравнительно небольшие (до 300 Гц — кинематические и до 10 Гц — силовые), а интегральные распределения ширины спектра процесса внутри этих диапазонов могут быть представлены выражением вида (1). Поэтому распределения внутри этих диапазонов для различных параметров не рассматриваются, так как большинство известных конструкций ИПП позволяют перекрыть его полностью одним, двумя типами датчиков с различными частотными характеристиками.
[c.168]
Шумомер первого класса должен иметь частотные характеристики Л, В, С и Лин. Допускается дополнительное применение частотной характеристики D. Эти характеристики определяют зависимость показаний шумомера от частоты, измеренной на чистых тонах и приведенной к нулевому уровню на частоте 1000 Гц. Характеристика направленности шумомера должна быть круговой с допустимыми отклонениями от главной оси 90° в диапазоне частот 500. .. 12500 Гц и 30° в диапазоне частот 2000. .. 8000 Гц. Характеристика направленности шумомера— зависимость показаний шумомера от угла ориентации микрофона относительно направления прихода звуковой волны. Главная ось микрофона (шумомера) совпадает с его осью симметрии или с направлением максимальной чувствительности. Нижний предел динамического диапазона шумомера не более 30 дБ (А), с учетом коррекции по характеристике А. Уровень собственных шумов должен быть не менее чем на 5 дБ ниже нижнего предела динамического диапазона. Нормируется также эквивалентный уровень звука в дБ (Л), В), (С), (D) при воздействии на шумомер определенной вибрации, переменного магнитного поля или ветра, если при этом акустическими помехами, действующими на микрофон, можно пренебречь.
[c.173]
Характеристика направленности шумомера должна быть круговой с допустимыми отклонениями от главной оси 90° в диапазоне частот 500. .. 12500 Гц и 30° в диапазоне частот 2000. .. 8000 Гц. Характеристика направленности шумомера— зависимость показаний шумомера от угла ориентации микрофона относительно направления прихода звуковой волны. Главная ось микрофона (шумомера) совпадает с его осью симметрии или с направлением максимальной чувствительности. Нижний предел динамического диапазона шумомера не более 30 дБ (А), с учетом коррекции по характеристике А. Уровень собственных шумов должен быть не менее чем на 5 дБ ниже нижнего предела динамического диапазона. Нормируется также эквивалентный уровень звука в дБ (Л), В), (С), (D) при воздействии на шумомер определенной вибрации, переменного магнитного поля или ветра, если при этом акустическими помехами, действующими на микрофон, можно пренебречь.
[c.173]
Уровень случайных помех. Кроме частных случайных погрешностей, обусловленных нерегулярными колебаниями воздействий влияющих факторов, уровень помех, ограничивающих возможность измерения малых сигналов, вызывается также тепловыми шумами в активных резистивных элементах и уровнем случайных пульсаций тока в измерительных цепях, индуцированных переменными электромагнитными полями. Снижение уровня электромагнитных помех достигается соответствующим экранированием измерительных цепей. Однако уровень шумов радиоэлектронной аппаратуры не всегда удается снизить до требуемой величины, и минимальное его значение приходится учитывать при определении динамического диапазона измерений.
[c.80]
Снижение уровня электромагнитных помех достигается соответствующим экранированием измерительных цепей. Однако уровень шумов радиоэлектронной аппаратуры не всегда удается снизить до требуемой величины, и минимальное его значение приходится учитывать при определении динамического диапазона измерений.
[c.80]
К сожалению, из-за химических реакций, происходящих на молекулярном уровне, фоточувствительность фотохромных материалов очень низкая, по крайней мере в тысячу раз меньше фоточувствительности галогенидосеребряных эмульсий. Однако именно поэтому фотохромные материалы не имеют зернистой структуры и их разрешающая способность ограничивается только длиной волны применяемого света. На фотохромных материалах с помощью лазера достаточной выходной мощности на подходящей длине волны излучения можно записывать объемные голограммы как методом потемнения, так и методом просветления. Эти голограммы не требуют ни мокрого, ни сухого проявления, поскольку для их записи и стирания необходимо лишь затратить энергию (световую или тепловую).
 Срок службы при циклической работе у неорганических фотохромных материалов очень большой, практически бесконечный, в то время как у органических фотохромных материалов он ограничивается усталостью. Записанные на фотохромных материалах голограммы должны иметь хороший динамический диапазон, но их дифракционная эффективность достигнет только нескольких процентов.
[c.314]
Срок службы при циклической работе у неорганических фотохромных материалов очень большой, практически бесконечный, в то время как у органических фотохромных материалов он ограничивается усталостью. Записанные на фотохромных материалах голограммы должны иметь хороший динамический диапазон, но их дифракционная эффективность достигнет только нескольких процентов.
[c.314]Динамический диапазон модулятора может лежать в интервале 404-60 дБ по интенсивности записывающего света (перепад интенсивностей в 100—1000 раз). Кроме указанных достаточно хорошо известных характеристик, необходимо обратить внимание на два дополнительных параметра — шумы и фазовая однородность модулятора. Требования низкого уровня собственных шумов связаны, в частности, с низкой дифракционной эффективностью модуляторов,, а отсутствие фазовых искажений есть специфическое требование когерентных оптических систем. Наличие фазовых искажений модулятора приводит к расширению (размытию) оптических сигналов на выходе фурье-процессора, а следовательно, к потере разрешающей-способности и резкому снижению отношения сигнал/шум. [c.31]
[c.31]
Динамический диапазон аппарата определяет разность уровней в дБ между минимальным и максимальным по амплитуде (или эффективному значению) сигналами, в пределах которой аппарат может работать, не внося в передаваемый сигнал искажений, выходящих за соответствующие допуски. [c.106]
Для новых видов музыкальных передач, как, например, поп-музыка, требуется динамический диапазон до 90 дБ и выше (иногда до 110 дБ), но при таких передачах возникает перегрузка слуха, приводящая к постепенному оглушению слушающих. Для цифровой записи такой диапазон дает возможность передачи сигналов практически с уровнями 20… 130 дБ. [c.37]
Динамический диапазон микрофона — разность между уровнем предельного звукового давления Л тах и уровнем собственных шумов N .0 = Л тах — Д - [c.64]
Нарушение точности передачи подразделяют на следующие виды 1) потеря акустической перспективы 2) смещение среднего уровня сигнала 3) ограничение частотного и динамического диапазонов 4) линейные, нелинейные и переходные искажения 5) маскировка шумами и помехами. [c.270]
[c.270]
В наиболее распространенном типе формантного вокодера выделяются четыре формантных частоты и четыре формантных уровня. Динамический диапазон этих параметров — не более 20 дБ, поэтому достаточны трехзначный код (8 значений по 2,5 дБ) и 40 отсчетов в секунду. Всего получается 8 3 40= = 960, и 240 имп/с отводится на передачу мелодии основного тона. Требуемая скорость передачи параметров получается равной 1200 имп/с. [c.287]
Логарифмическое сжатие регулирует значение динамического диапазона, отражаемого в спектре. Увеличение логарифмического сжатия приводит к увеличению динамического диапазона и возрастанию в спектре низко- и среднескоростных составляющих, причем при превышении некоторого предела (когда анализу начинают подвергаться низкоинтенсивные сигналы), помимо допплеровского спектра, появляется и побочный шум (также характеризующийся низкими интенсивностями колебаний). Снижение уровня логарифмического сжатия приводит к исчезновению шума, одновременно из спектра вычитаются низкоскоростные потоки (рис. 3.82). Соотношение шум/низкоскоростные потоки должно быть оптимально подобрано. Это наиболее значимо при исследовании сосудов, характеризующихся низкоинтенсивными низкоскоростными потоками (вены, мелкие артерии). [c.77]
Схемы защиты и индикации настроены на срабатьшание при подведении к АС реального музыкального сигнала пиковой мощности 76. . . 100 Вт, что соответствует уровню звукового давления не менее ПО дБ. При установленной заглушке ЗАЩИТА схеме срабатывает при пиках сигнала 300 350 Вт, что соответствует уровню звукового давления около 116 дБ. Первый режим обеспечивает максимальную надежность второй — максимальный динамический диапазон и используется прн испытаниях на максимальную кратковременную мощность. [c.46]
Логарифматор Лог (рис, б.23,е) служит для расширения динамического диапазона измеряемых уровней. В схеме на рис. 6.23,г эту функцию при необходимости может выполнять делитель напряжения ДН. Роль УПТ и ключевых схем КС — развязка показывающего прибора от основной цепи. Компараторы Ком в схеме на рис. 6.23,г срабатывают при различных входных напряжениях ИУ, что и обеспечивает работу светодиодного показывающего прибора. [c.207]
В процессе решения проектных зааач С, Г1Р ОЭП может возникнуть необходимость ввода изображений, оладаюших значительным контрастом и малым уровнем шумов. Ввиду того, что динамический диапазон устройств ввода имеет конечные paз epы, может возникнуть опасность потери информации о птуме, если вводить отсчеты яркости по линейно.му закону. Поэтому в качестве устройств ввода изображений предпочтительнее использовать устройства, измеряюитие коэффициент проп> скания. [c.126]
Оценив коэффициенты v и х и зная величину первой критической скорости ротора (01, можно по формуле (III.9) найти диапазон скоростей вращения ротора О значения коэффициента (ПГ.9) не превосходят 2—3. Если внутри этого диапазона лежат и все рабочие скорости ротора, то можно считать, что достигнутая на балансировочном станке точность уравновешивания сохраняется (с точностью до порядка) и на рабочих оборотах в этом случае для уравновешивания ротора достаточно обычной динамической балансировки его на станке (на низких оборотах). Если рабочие скорости вращения ротора выходят за границы указанного диапазона и никакими мерами, влияющими на возможные значения коэффициентов [л и v, не удается так расширйть этот диапазон, чтобы (Opag оказались внутри его, то обычная динамическая балансировка ротора на станке является, вообще говоря, недостаточной, а любое увеличение точности этой балансировки — самообманом, так как оно все равно не приведет к снижению уровня вибрации ротора на рабочих его оборотах. Такое положение, в частности, практически всегда будет иметь место при использовании гибких роторов, т. е. когда С0раб,> (Oj. [c.115]
Отметим, что все результаты измерения аараиетров модуляции света в структурах с питанием постоянным напряжением получены при малом уровне считывающего излучения, поскольку последнее из-за наличия примесных центров в ФП вызывает паразитный оптический Отклик. Чувствительность структур данного типа на длине волны модулируемого сигнала оказалась около 3-10 Дж -с>1 или приблизительно в 10 раз меньшей, чем к управляющему. Для струкгур с отражением света динамический диапазон усиления яркости повышался до 10 и даже до 10 при использовании светопоглощаюших слоев. [c.152]
На базе таких материалов могут быть созданы управляемые ПФ, появление которых откроет широкие возможности по синтезу разного рода легко перестраиваемых и адаптивных систем оптической обработки изображений, работающих в реальном времени и реализующих не только линейные, но и нелинейные алгоритмы. В качестве управляемых ПФ можно использовать некоторые типы пространственных модуляторов света (гл. 4). Следует, однако, заметить, что к управляемым ПФ предъявляются более жесткие, чем к ПМС, требования в отношении разрешения, динамического диапазона, уровня собственных шумов и т. п. В настоящее время только PROM удовлетворяет предъявляемым требованиям в значительной мере. [c.231]
Реверсивные голографические фильтры, как и оптически управляемые ПВМС, должны быть линейными по отношению к амплитуде считывающего света элементами, допускать многократное повторение циклов записи и стирания информации, обладать низким уровнем шумов и т. д. Эти и ряд других требований к ним совпадают с таковыми для ПВМС. Но имеются два существенных отличия. Первое — Это разрешающая способность фильтра. Она должна быть по крайней мере в 3—4 раза выше, чем у ПВМС. Второе отличие — более высокие требования к динамическому диапазону. Эти вопросы более подробно будут обсуждаться в главе 9. [c.31]
Часто требуется ослабить лазерный пучок до уровня энергии или мощности, соответствующего динамическому диапазону имеющегося приемника. Располагая хорошо откалиброванным ослабителем, можно также определить область, в которой чувствительность приемника следует некоторому предписанному закону, или исследовать характер отклонений от этого закона. При сравнительно низких интенсивностях, с которыми обычно имеют дело в оптике, в качестве ослабителей пользуются нейтральными фильтрами. Такой фильтр представляет собой прозрачную среду, например желатину или стекло, содержащие поглощающий материал подходящей концентрации. Спектральные характеристики такого материала слабо зависят от длины волны, по крайней мере в видимой области спектра, и поэтому они выглядят серыми или черными в зависимости от их общего поглощения. При работе с такими фильтрами в узких интервалах длин волн нужно соблюдать осторожность, ибо коэффициент пропускания типичных фильтров может изменяться в пределах видимого спектра почти в 2 раза. По этой причине, а также в силу того, что из-за взаимодействия излучения в результате поверхностного отражения внутри пачки таких фильтров общие вносимые потери совокупности фильтров могут быть не равными сумме индивидуальных вносимых потерь, следует калибровать каждый фильтр или пачку фильтров на нужной длине волны, когда требуется высокая точность измерений. [c.137]
Методов измерения световой мощности очень много. Но при измерении такими методами импульсов высокой интенсивности твердотельных лазеров размеры установок и быстродействие, динамический диапазон, свойства насыщения оказываются несовместимыми с задачей воспроизведения с разрешением во времени точных значений интенсивности лазера. Типичная приемная система, пригодная для измерения выходной мощности лазера с высоким уровнем интенсивности, состоит из ослабителя для уменьшения интенсивности лазерного излучения приемника, преобразующего оптическую энергию в ток или напряжение, и выходного прибора для регистрации формы импульса (или пико- [c.182]
Шумы аудитории (в концертном зале и в жилой комнате) повышают порог слышимости примерно на 30—36 дБ, в киноаудитории — на 40 дБ. По этим данным диапазон уровней, которые может воспринимать человек при слушании оркестра, находясь в первых рядах зала, составляет 107—(304-35) =72- 77 дБ, при слушании речи 48 дБ. Эти результаты были получены по исследованиям, проводившимся в США в 30-х годах. Более поздние измерения, проводившиеся в ФРГ, привели к следующим динамическим диапазонам, дБ [c.126]
Разность между кв зимаксимальным и квазиминимальным уровнями наз лвают дина мическим диапазоном D i max — min Таким образом (см. рис. 3.2) находят динами ческие диапазоны для ряда первичных акус тических сигналов, включая и речевой сигнал Некоторые из них приведены в табл. 3.1 Из таблицы следует, что вещательный динами ческий диапазон очень широк и поэтому в большинстве случаев не может быть передан через тракты вещательных каналов без предварительной обработки, т. е. без сжатия (компрессии) динамического диапазона. Но и речевой информационный сигнал имеет широкий динамический диапазон по отношению к трактам связи, и поэтому его также приходится предварительно сжимать или считаться с наличием ограничения его в самом тракте передачи. [c.36]
Основные операции, которые осуществляют с помощью микшерных пультов регулировка уровней звуковых сигналов от отдельных источников и их смешивание в определенных соотношениях регулировка уровней от источников, сгруппированных определенным образо общая регулировка уровней звукового сигнала изменение частотного спектра звуковых сигналов усиление сигналов дополнительная автоматическая регулировка уровней и динамического диапазона с помощью авторегулятора уровня изменение акустической окраски звучания с помощью устройств искусственной реверберации, подключаемых к пульту формирование вещательных передач из отдельных фрагментов визуальный и ( луховой контроль звуковых сигналов с помощью различных измерительных приборов и устройств прослушивания. [c.182]Быстродействующие регистраторы уровня имеют равномерную шкалу в логарифмическом масштабе. Их динамический диапазон стандартизован (25 — 50—75 или 30—60— 90 дБ). Запись ведется чернилами или резцом на красной бумаге, покрытой тальком. Скорость записи, диапазон и постоянная времени могут изменяться скачками в некоторых пределах. Регистраторы уровня обычно подклю-чаю.тся к измерителям звукового давления, и поэтому на них можно автоматически записывать частотные характеристики аппаратуры, их характеристики направленности и др. [c.288]
Динамический диапазон для цифро-аналоговых преобразователей
Динамический диапазон для цифро-аналоговых преобразователей несколько отличается по своей сути от динамического диапазона усилителя.
Для усилителя – это отношение максимального уровня сигнала на выходе при предельно допустимых искажениях к собственному уровню шумов усилителя без подачи сигнала. Для усилителя параметр сигнал/шум и динамический диапазон является одним и тем же. Более того, говоря о динамическом диапазоне усилителя, мы оцениваем, насколько большой диапазон усилитель развивает над уровнем своих шумов. У ЦАП-ов максимум сигнала фиксирован (0 dBFS) и уменьшается до собственного уровня шумов и мы оцениваем, насколько низок уровень шума. В усилителе идет оценка от меньшего к большему, а в ЦАП наоборот.
Динамический диапазон для ЦАП-ов является отношением максимального уровня сигнала (0 dBFS) к уровню шумов, измеренных при подаче сигнала с малой амплитудой (-60 dBFS). Т.е. если в случае с усилителем фиксируется два значения: максимальный уровень сигнала и уровень шума без сигнала, то в тесте с динамическим диапазоном для ЦАП измеряется уровень шума, за вычетом гармоники с частотой 1 кГц, поданной с уровнем -60 dBFS.
В случае современных ЦАП-ов, представляющих собой качественные решения с низким уровнем гармонических искажений, динамический диапазон как правило не отличается от параметра сигнал/шум, т.к. низкий уровень сигнала имеет искажения настолько низкого уровня, что их энергетический вес не влияет на общий результат.
В случае с мультибитными ЦАП-ами без фильтрации, особыми настройками фильтров или применением каких-либо обработок сигнала в цифре (например транкейте), динамический диапазон становится уже, нежели параметр сигнал/шум. В выше перечисленных случаях параметр ухудшается из-за того, что сигнал малой амплитуды отклоняется от формы волны синуса и в спектре появляются дополнительные гармоники от искажений. Вес этих гармоник и увеличивает общий уровень шума.
Примеры
Теория
Идеальный результат
Идеальный результат получаем, когда форма воспроизводимого сигнала совпадает с формой синуса, поданного на ЦАП. На спектре шумовая полка должна совпадать со спектром шумовой полки без сигнала. На картинке синим цветом обозначена шумовая полка, а зеленым – гармоника с уровнем -60 дБ и частотой 1 кГц.
Мультибитный ЦАП без фильтрации
Мультибитные ЦАП без цифровой фильтрации строят форму волны «ступеньками», что вызывает дополнительные искажения. Доминирующие гармоники от искажений кратны основному тону. Обычно, подобные ЦАП-ы отличаются более хорошими характеристиками в тесте на не музыкальных сигналах в виде меандра и импульса. В аудиофильских кругах – это самые «музыкальные» ЦАП.
Транкейт
Транкейт относится к обработке сигнала в цифровом виде. При передаче данных, при изменении разрядности сигнала координаты точек определяются по простому алгоритму – выбору ближайшего значения в новой сетке координат (по вертикали). Обычно от транкейта страдают самые тихие участки в треке, и чем большее количество раз трек подвергнулся операции транкейта, тем на более громких участках он становится слышимым. Как правило, искажения от тракейта становятся хорошо слышимыми при многократном повторении операции транкейта.
Форма волны становится менее гладкой, а на спектре появляются искажения в виде коррелированного шума (синий – шумовая полка, зеленый — гармоника с уровнем -60 дБ и частотой 1 кГц, оранжевый – коррелированный шум). Искажения не кратны основному тону и как правило их амплитуда лишь незначительно превышает уровень шумовой полки. При многократной операции транкейта уровень искажений растет.
Другие искажения
К другим искажениям можно отнести искажения обвязки ЦАП или особым настройкам фильтров, где волна отклоняется от идеальной формы, но уже по другим причинам.
Форма волны мало отличается от идеальной, а на спектре можно видеть кратные гармоники искажений низких амплитуд (синий – шумовая полка, зеленый — гармоника с уровнем -60 дБ и частотой 1 кГц, оранжевый — искажения).
Примеры реальных результатов
Идеальные
Для 16 бит в RMAA PRO
Для 24 бит в RMAA PRO
Мультибит или особые настройки фильтра при воспроизведении ступенчатого сигнала.
Для 16 бит в RMAA PRO – мультибитный ЦАП без аппроксимации сигнала.
Транкейт
Для 24 бит в RMAA PRO
Технические измерения динамического диапазона
RMAA
При измерении с помощью RMAA на выход ЦАП подается тоновый сигнал с уровнем -60 dBFS. Сигнал с ЦАП записывается на отдельный АЦП или звуковую карту с АЦП. Точность получаемых данных зависит от точности используемого АЦП тракта.
При анализе файла производится подсчет уровня шума, аналогично тесту сигнал/шум, с вычетом полученной гармоники в районе 1 кГц. За точность калибровки в -60 дБ для записанного сигнала отвечает нормализация всего записанного сигнала по синхронизирующему сигналу с уровнем -6 dBFS с частотой 1 кГц.
Автор:
29.05.2012
Нашли опечатку в тексте? Выделите и нажмите Ctrl+Enter. Это не требует регистрации. Спасибо.
Поделитесь в социальных сетях
AD641 Техническое описание и информация о продукте
Особенности и преимущества
- Логарифмический усилитель
- Полоса до 250 МГц
- Динамический диапазон 44 дБ
- Отклонение от логарифмического закона ±2.0 дБ
- Выход напряжения 37.5 мВ/дБ
- Стабильные наклон и точка пересечения характеристики
- Входное шумовое напряжение 2.0 нВ/vГц
- Входное напряжение смещения 50 мкВ
- Низкое энергопотребление
- Напряжение питания ±5 В
- Рабочий ток 9 мА (+Vs),35 мА (-Vs)
- Интегрированные резисторы
- Интегрированный аттенюатор с коэффициентом ослабления 10x
- Выходы биполярного тока
- Дифференциальный сигнальный тракт со связью по постоянному току
Подробнее о продукте
AD641 — это демодулирующий логарифмический усилитель с полосой 250 МГц, обладающий погрешностью ±2.0 дБ и динамическим диапазоном 44 дБ. Для формирования выходного тока, пропорционального логарифму входного сигнала, в нем применяется архитектура последовательного детектирования. Выходной ток может быть преобразован в напряжение при помощи одного или нескольких интегрированных резисторов, задающих наклон характеристики. Одиночный компонент обеспечивает динамический диапазон до 44 дБ при полосе до 250 МГц, а два каскадно включенных компонента способны давать динамический диапазон 58 дБ при полосе до 250 МГц. AD641 сохраняет высокую стабильность характеристик в промышленном или военном температурном диапазоне, в зависимости от исполнения.
AD641 – это не просто схемный функциональный блок, а, скорее, готовое решение для логарифмической компрессии и измерения динамического диапазона сигналов. Компонент включает в себя пять каскадов, каждый из которых содержит двухполупериодный выпрямитель, выходной ток которого зависит от входного напряжения. Выходные токи отдельных каскадов складываются для получения демодулированного выходного сигнала в виде тока с масштабом 1 мА на декаду (50 мкА/дБ).
При неактивном входном аттенюаторе с коэффициентом ослабления 10 отклонение характеристики от логарифмического закона составляет не более 2.0 дБ в диапазоне уровней входного сигнала от -44 дБм до 0 дБм. Аттенюатор обеспечивает максимальную гибкость проектирования, не оказывая значительного влияния на характеристики.
Температурная стабильность и широкая полоса (250 МГц) делают данный продукт идеальным выбором для измерения мощности широкополосных сигналов в системах ВЧ/ПЧ. Требуемая ширина полосы при измерении мощности в средствах радиоэлектронного подавления/радиолокационных системах и системах связи обычно составляет от 100 до 180 МГц. Широкая полоса и малая погрешность, а также широкий диапазон измерения, делают данный компонент идеальным решением для работы с широкополосными сигналами, обладающими большим динамическим диапазоном.
AD641 выпускается в исполнениях для промышленного (от -40°C до +85°C) и военного (от -55°C до +125°C) температурных диапазонов. Версии для промышленного диапазона доступны в пластиковых корпусах DIP и PLCC; версии для военного диапазона выпускаются в керамическом корпусе DIP.
Области применения
- Обработка ВЧ/ПЧ сигналов
- Индикаторы мощности принятого сигнала (RSSI)
- Сжатие сигналов
- Быстродействующие спектральные анализаторы
- Средства радиоэлектронного подавления/Радары
Что такое динамический диапазон, и какое отношение он имеет к фотографии
Динамический диапазон — характеристика устройства или системы, предназначенной для преобразования, передачи или хранения некой величины (мощности, силы, напряжения, звукового давления и т. д.), (Википедия, Динамический диапазон).
Применительно к фотографии, чаще всего имеется в виду величина между крайними значениями светлого и темного и вся информация, которая находится между этими двумя крайними значениями. Определяет способность светочувствительного материала, или матрицы в цифровой фотографии, правильно передавать яркость снимаемого объекта. Но это так называемый технический диапазон, на практике фотограф часто не использует весь отрезок, а только какую-то его часть и тогда применяют термин «полезный динамический диапазон».
Динамический диапазон есть у человеческого глаза, у матрицы цифрового фотоаппарата, у дисплея, монитора, и даже файла, в котором вы сохраняете свои фотографии.
Разберемся подробнее.
В данной статье мы будем говорить о цифровой фотографии, и соответственно о Динамическом диапазоне применительно к ней.
В пленочной фотографии термин был другим, употребляли словосочетание «Фотографическая широта фотоматериала», а уже в цифровых технологиях стали применять термин «Динамический диапазон».
Как не трудно догадаться у динамического диапазона есть нижняя и верхняя границы. Нижняя граница динамического диапазона задана уровнем собственного шума матрицы.
Данный шум генерирует сам фото сенсор, даже тогда когда на него не попадает ни одного фотона света.
Чтобы на снимке появилось, сколько-нибудь различимые детали нужно, чтобы уровень полезного сигнала превысил уровень шума.
Это значит что нижний порог чувствительности матрицы, и соответственно нижний порог динамического диапазона, можно определить как уровень выходного сигнала, при котором отношение сигнал-шум больше единицы.
Верхняя граница динамического диапазона определяется, максимальной наполненностью фотодиода.
То есть фотодиод рассматривается как некая емкость определенной вместимости, ее постепенно наполняют фотоны света, как только фотоны наполнять эту емкость до краев, данный фотодиод будет восприниматься как абсолютно белый, и ни какую информацию мы в него уже поместить не сможем, описанное явление, с переполненным фотодиодом, называется «клиппинг».
Соответственно, чем более емким будет фотодиод, тем больший сигнал он может дать на выходе, до полного насыщения.
Надо понимать что клиппинг, это резкая граница, за которой нет деталей, а вот нижняя граница, не так резка, детали тонут в шумах, но какие-то остатки информации еще остаются даже за границей.
Отсюда распространенное мнение многих фотографов, что провалы в тенях не так страшны, как провалы в светах, это мнение сложилось также и из-за некоторых особенностей полиграфического процесса, и напрямую связано с клиппингом. То есть провалы в светах в полиграфии называются полиграфической дыркой, и они просто не печатаются, то есть краска не покрывает данное место, мы видим цвет бумаги, визуально это выглядит не очень эстетично и считается браком. Важно понимать, что чем ближе к нижней границе, тем больше шума, если важно чтобы фото было менее шумным то все-таки старайтесь держать полезный динамический диапазон ближе к верхней границе, не забывая при этом о клиппинге.
Также не надо забывать, что динамический диапазон человеческого глаза значительно шире, чем диапазон самой лучшей камеры. Потому любой фотограф всегда встречается с проблемой как в меньшее поместить большее. Для решения данной задачи человечеством потрачено немало сил, и еще до изобретения фотографии с данным явлением сталкивались художники, и разрабатывали разные способы решения данной проблемы. Именно они открыли правило «Больше света меньше цвета» то есть Клиппинг хотя о фотографии, а тем более цифровой, тогда даже самые смелые умы и мечтать не решались.
Так вот расширение динамического диапазона это, по сути, способ решения данной проблемы, то есть сохранение детализации во всем видимом диапазоне.
Понаблюдайте за своим зрением, и сравните с картинкой, которую дает ваша камера. Часто и, как правило, вы видите снимаемую сцену со всеми деталями и в тенях и в светах даже при слабом и даже очень слабом освещении, а камера даже очень хорошая такой широтой похвастаться не может, приходится прибегать ко всяким хитростям, например, дополнительно освещать, снимаемый объект.
И хотя многие художники, а за ними некоторые фотографы, не парились по данному поводу, и превращали провалы в тенях и цветах в художественный прием. Или придумывали для изображаемого мира свои законы с массой условностей, например, фактуру рисовали только на границе тени и света, в полу тенях, тем самым передавая текстуру объекта без передачи деталей в тенях и цветах. Но все же погоня за детализацией продолжается до сих пор, и надо сказать результаты впечатляют, хороший и очень показательный пример это снимки космоса, сделанные с телескопа Хаббл и ему подобных космических аппаратов, когда из практически, казалось бы, пустого пространства вытаскивается масса очень детальной информации.
Но тут мы встречаемся еще с одной проблемой дело в том, что динамический диапазон средств просмотра фотографий не позволяет нам просматривать фотографии, сделанные в том расширенном диапазоне, которого можно достичь по средствам все возможных технологий и даже сохранить в файле. Но просмотреть его в такой широте мы не можем, потому что наталкиваемся на ограниченные возможности мониторов или фотобумаги, и полиграфические технологии нас тоже не балуют.
И часто, когда вам говорят о фотографиях с расширенным динамическим диапазоном, на самом деле говорится о его сужении до диапазона средств просмотра, при сохранении детализации, которая присутствовала в файле с действительно расширенным диапазоном.
То есть когда вам говорят о том, что по средствам, например HDR фотографии можно значительно расширить динамический диапазон то надо понимать что речь, по сути, идет о еще одном способе как избежать клиппинга и повысить детализацию в светах и тенях, а динамический диапазон все равно будет ограничен средствами просмотра.
И в данном контексте уместнее говорить не о диапазоне камеры, монитора или фотоматериала, а о диапазоне всего фотографического процесса в целом, который в конечном итоге все равно вынужден, равняется на средства просмотра.
Надо сказать и о том, что технологии на месте не стоят, и все возможные производители постоянно анонсируют разнообразные технологии, с помощью которых можно будет просматривать изображения со значительно более широким динамическим диапазоном.
Часто данным термином называют величину допустимого отклонения экспозиций при съемке в определенных условиях с сохранением детализации в светах и тенях (полезный динамический диапазон). То есть в данном случае речь идет не о расширении диапазона, а об использовании имеющихся возможностей, которые предоставляет фотоматериал или матрица, и в данных пределах добиться максимальной детализации.
И также надо понимать, что в процессе обработки снимка, с файлом, полученным в процессе фотографирования, происходят разнообразные изменения, что в свою очередь тоже влияет на динамический диапазон. Можно расширить, а можно сузить. Формат, в котором сохраняются кадры, тоже влияет на диапазон, RAW файл сохраняет больше информации, чем JPG, и значит, имеет больший диапазон, и при обработке данное качество очень помогает, больше информации больше возможностей при ее обработке. При использовании HDR технологии, когда совмещается в одном файле несколько с разной экспозицией, получаются снимки с очень большим динамическим диапазоном. Но сохраняется фотография для просмотра, как правило, в JPG формате который не может похвастаться такой широтой, но более удобен как конечный файл. И, следовательно, мы опять упираемся в проблему сохранения большего в меньшем, и ограничения которые накладывают на весь прочес особенности конечного файла.
Вы спросите, а на кой тогда производители стараются расширять диапазон камеры, и фотографы так носятся с идеей повышения данного показателя, если все равно выше конечного файла и средств просмотра не прыгнешь. Да не прыгнешь, но повысить качество фотографии можно и чем больше у вашей камеры, и всех остальных составляющих фотографического прочеса динамический диапазон тем потенциально более качественный продукт они могут выдавать в конечном итоге.
Измеряется динамический диапазон в тех же единицах что и экспозиция, то есть в EV (на фото жаргоне стоп, или шаг), то есть двоичный логарифм, иногда меряют десятичным логарифмом (D), 1EV=0,3D. Реже меряют линейно, например 1:1000, 1:1000 соответствует 3D и почти равно 10EV.
Почему самое распространенная единица это EV во многом по тому, что это двоичный логарифм. Суть в том, что для зрения, как и для некоторых других органов чувств, величина ощущения пропорциональна логарифму воздействия. И когда, например освещенность возрастает или падает на одно деление по логарифмической шкале согласно двоичному логарифму, то есть удваивается, то человечек своим зрением это воспринимает как изменение в одно значение по линейной шкале.
Разрядность или глубина цветности это показатель определяющий количество оттенков цвета, то есть чем больше разрядность, тем больше оттенков цвета, измеряется в «битах». Есть два вида разрядности на канал «бит на канал» и на пиксел, это сумма числа бит по всем трем каналам, которая представляет собой общее кол-во цветов в одном пикселе.
Оба показателя тесно связаны с динамическим диапазоном, но разрядность пикселов это показатель которым описывают, как правило, свойства аппаратуры, то есть матрицы.
А по канальная глубина цветности это показатель, с помощью которого чаше всего описывают свойства файлов определенных форматов.
В формате RAW эти показатели наиболее высоки, потому что данный формат это не обработанная информация, снятая с матрицы. И когда вы фотографируете, то побеспокойтесь, чтобы на вашей камере было установлена максимальная разрядность, если конечно у вас присутствуют такие настройки.
Разрядность современных камер может быть достаточно высокой в среднем 12 и 14 бит, но разрядность JPG файла всего 8 бит, и, как правило, фотографы и ретушеры стараются сохранять изображения в других форматах с большей разрядностью для обработки, а уже полностью обработанное изображение переводить в разрядность 8 бит.
ISO и динамический диапазон, это еще одна дилемма, которая иногда встает перед фотографом, суть в том, что с повышением ISO понижается диапазон, связано это с возрастанием уровня шума. С увеличением ISO вдвое, например со 100 до 200, вдвое сокращается и емкость фотодиода, потому что верхняя граница не куда не делась, она не изменено стоит на своем месте, потому что объем диода не изменен, а вот нижняя с шумами подтянулась вверх. И фотограф вынужден выбирать, что для него в данном конкретном случае важнее, широкий диапазон, или высокие ISO.
Подведем итог, что может сделать фотограф, чтобы повысить качество фотографии, опираясь на знания о динамическом диапазоне;
- Снимайте в формате RAW, это позволит иметь в исходнике наибольший динамический диапазон, который можно выжать из данной камеры.
- Используйте наибольшую разрядность из имеющихся в вашем распоряжении, и только после окончательной обработки, в файле, предназначенном для просмотра переводите в меньшую.
- Снимайте на меньшие ISO, чтобы избежать сужения динамического диапазона.
- Думайте, в каких пределах вам держать полезный динамический диапазон, чтобы избежать клиппинга, и не свалится в шумы.
- Если требуется, используйте HDR технологии, они действительно иногда помогают, улучшит качество снимков.
Надо сказать, что помимо HDR технологий есть масса способов как в процессе обработки фотографий повысить качество и в частности детализацию, об этих способах мы поговорим, когда речь пойдет о практических приемах обработки фотографии.
Динамический диапазон — характеристика устройства или системы, предназначенной для преобразования, передачи или хранения некой величины (мощности, силы, напряжения, звукового давления и т. д.), представляющая логарифм отношения максимального и минимального возможных значений величины входного параметра устройства (системы). Минимальное значение обычно определяется уровнем собственных шумов или внешних помех в устройстве, а максимальное — перегрузочной способностью устройства. Понятие динамический диапазон используется не только в технике, но и в психофизиологии, например, динамический диапазон слышимости человека. В отдельных случаях понятие <динамический диапазон> используется и для выходного параметра (для акустических устройств).
- Динамический диапазон радиоприёмника (тракта в целом, функционального узла тракта) — логарифм отношения уровня сигнала на входе радиоприёмника, определенного по одному из критериев, к чувствительности радиоприёмника. По методике определения (по критерию) различают односигнальный динамический диапазон (динамический диапазон по компрессии) и двухсигнальный динамический диапазон (динамический диапазон по блокированию, динамический диапазон по интермодуляции).
- Динамический диапазон усилителя — логарифм отношения максимальной амплитуды входного сигнала электронного усилителя, при которой искажения сигнала достигают предельно допустимого значения, к чувствительности усилителя.
- Динамический диапазон канала связи — логарифм отношения максимальной мощности сигналов, пропускаемых каналом, к минимальной.
- Динамический диапазон сканера — показатель технических возможностей сканеров, характеризующий интервал оптических плотностей, который воспринимается сканером
- Динамический диапазон (фотография)— способность матрицы или плёнки (фотографическая широта) передавать яркость объектов реальной сцены.
- Динамический диапазон фотоматериала, Фотографическая широта — характеристика светочувствительного материала (фотоплёнки, передающей телевизионной трубки, матрицы), а также фотографического процесса в целом в фотографии, телевидении и кино.
Понимание динамического диапазона… Игра в числа
Существует немалая путаница, вызванная отчетами о динамическом диапазоне профилировщиков пучка. Цель этой заметки по применению — объяснить некоторые термины, используемые при обсуждении этого параметра как Ophir-Spiricon, так и другими поставщиками профилометров пучка.
Определение
Динамический диапазон — это отношение наибольшего измеряемого сигнала к наименьшему измеряемому сигналу. Наименьший измеряемый сигнал обычно определяется как сигнал, равный уровню шума или, альтернативно, «шумовой эквивалентной экспозиции» или той точке, где отношение сигнал / шум (SNR) равно 1.
Для измерения профиля пучка мы должны иметь отношение сигнал / шум не менее 10, чтобы получить минимально полезный результат. Для достижения точности 2% требуется больше, чем отношение сигнал / шум 100: 1. Однако в технических характеристиках приборов Ophir и его конкуренты используют динамический диапазон оцифровки. Обсуждение ниже будет следовать этому подходу.
Единицы
Динамический диапазон может быть выражен как отношение, например 1000: 1, или он может быть выражен в децибелах мощности или напряжения.
Следовательно, если соотношение 1000: 1 соответствует двум уровням мощности лазера, динамический диапазон дБ будет:
Однако, если соотношение относится к напряжению, например, при обсуждении коэффициента усиления в схеме инструментального усилителя, то динамический диапазон в дБ будет:
Пример
Рассмотрим типичную 12-битную камеру CCD, такую как BeamGage SP-620 или 12-битный NanoScan. Диапазон оцифровки компьютерного интерфейса составляет от 0 до 212-1 отсчетов или 0-4095 отсчетов.Выражается в дБ мощность это 36 дБ. Выражается в дБ вольт , это становится гораздо более впечатляющим 72 дБ. Урок здесь состоит в том, чтобы убедиться, что вы понимаете единицы измерения при сравнении динамического диапазона системы, выраженного в дБ.
Динамический диапазон оцифровки в зависимости от динамического диапазона измерительного сигнала
Рассмотрим снова 12-битный SP-620. Сама камера представляет собой матрицу CCD с заданным динамическим диапазоном 880: 1. На самом деле это меньше, чем диапазон дигитайзера, поэтому, когда мы говорим, что динамический диапазон составляет 64 дБ, мы действительно говорим о дигитайзере.Диапазон 880: 1 массива относится к шумовому эквиваленту, и в результате получается мощность дБ , равная 29,44 дБ.
Мгновенное (однократное измерение) в сравнении с общим достижимым динамическим диапазоном
Теперь мы можем разделить динамический диапазон прибора на две части: возможность мгновенного или однократного измерения и возможность полного достижимого диапазона. Возможность мгновенного или однократного измерения — это динамический диапазон оцифровки за вычетом любых уровней шума.Полный достижимый диапазон включает диапазон оцифровки и любые расширения диапазона, достигаемые с помощью регуляторов усиления и экспозиции, а также внешнего затухания, такого как фильтры нейтральной плотности.
Для вышеупомянутого SP-620 с программным пакетом BeamGage регуляторы экспозиции и усиления добавляют дополнительные 72 дБ вольт , 36 дБ мощность . Это дает общий динамический диапазон на кадр около 65 дБ мощность . Однако, добавив к этому затухание, мы можем расширить динамический диапазон до почти безграничного уровня.
Пример NanoScan
Динамический диапазон оцифровки NanoScan составляет 36 дБ, мощность , мощность (12 бит). Схемы усилителя обеспечивают автоматический диапазон усиления около 85 дБ, В, , и , поэтому общий динамический диапазон измерения может быть заявлен как 78,5 дБ, , мощность, (36+ (85/2)). Это можно увидеть на диаграммах рабочего пространства различных моделей NanoScan, которые показывают примерно семь (7) порядков величины.
Заключение
Важно понимать, какие единицы используются при сравнении динамического диапазона различных инструментов.Большинство систем CCD сообщают динамический диапазон в дБ В . NanoScan и гониометрические радиометры сообщают о своих динамических диапазонах в дБ , мощности . Оба действительны, но если вы хотите понять, как динамический диапазон повлияет на ваши измерения лазерного луча, мощность дБ предоставит более реалистичное значение отклика датчика на изменяющиеся уровни мощности лазера.
i Это немного варьируется в зависимости от типа детектора (например, кремниевый детектор имеет диапазон усиления 103 дБвольта, пироэлектрический 85 дБ)
Читать статью полностью
Взаимосвязь размера слова данных с динамическим диапазоном и качеством сигнала в приложениях для обработки цифрового звука
С момента появления компакт-диска в начале 1980-х годов цифровая технология стала стандартом для записи и хранения высококачественного звука.Нетрудно понять почему. Цифровые сигналы надежны. Цифровые сигналы можно передавать и копировать без искажений. Цифровые сигналы можно воспроизводить без ухудшения несущей. Кто захочет вернуться к царапанию иглой по виниловой канавке сейчас?
Еще одно преимущество цифровых аудиосигналов — легкость, с которой ими можно манипулировать. Технология цифровой обработки сигналов (DSP) продвинулась до такой степени, что почти любой аудиопродукт, от мобильного телефона до профессионального микшерного пульта, содержит микросхему DSP.И снова причины успеха DSP просты: стабильность, надежность, повышенная производительность и программируемость. Функции обработки сигналов могут быть реализованы за небольшую часть стоимости и за долю пространства, необходимого для аналоговых схем, а также обеспечивая функциональность, которую просто невозможно реализовать в аналоговом исполнении. Фактически, это стало настолько повсеместным, что для многих слово «цифровой» стало синонимом «высокого качества».
Постоянно растущая производительность и падающая стоимость оборудования DSP привели к появлению новых приложений и новых рынков цифрового звука как в потребительском, так и в профессиональном звуковом секторе.Цифровой универсальный диск (DVD) и цифровой объемный звук в доме, цифровое радио и сотовые телефоны с функцией громкой связи в автомобиле — это лишь некоторые из технологий на основе DSP, которые появились в последние несколько лет. Требования к качеству, скорости и гибкости DSP также выросли по мере того, как продукты DSP были добавлены к большей функциональности: теперь DSP может потребоваться для микширования, эквализации, сжатия динамического диапазона и распаковки данных, все в одном продукте, реализованном на одном кристалле. .
16 бит, 44.Цифровой звук PCM с частотой 1 кГц продолжает оставаться стандартом для высококачественного звука в большинстве современных приложений, таких как CD, DAT и высококачественный звук с ПК. Однако последние технологические разработки и улучшенные знания о человеческом слухе создали потребность в большей длине слова данных. Доступные сейчас аналого-цифровые преобразователи поддерживают 18, 20 и 24 бит и способны превышать динамический диапазон 96 дБ, доступный при использовании 16-битных слов данных. Многие студии звукозаписи в настоящее время обычно записывают свои записи с использованием 20- или 24-битных записывающих устройств.Эти технологические разработки начинают проникать в потребительские и «просьюмерские» аудиоприложения. Наиболее очевидным воздействием звука на потребителя является DVD, способный передавать звук с разрешением до 24 бит при частотах дискретизации значительно выше 48 кГц. Другой пример — 16-канальный цифровой домашний студийный рекордер, способный выполнять дискретизацию с частотой дискретизации 96 кГц и разрешением 24 бита. Фактически, можно выделить три тенденции, которые повлияли на текущее поколение цифровых аудиоформатов, которые призваны заменить цифровой звук на компакт-дисках.Их можно резюмировать следующим образом:
- Более высокое разрешение — 20 или 24 бита на слово данных
- Более высокая частота дискретизации — обычно 96 кГц и 192 кГц
- Больше аудиоканалов для более реалистичного «трехмерного» звучания
В настоящее время на рынке появляются недорогие высокопроизводительные процессоры цифровых сигналов, которые удовлетворяют требованиям высокого динамического диапазона для обработки или синтеза аудиосигналов. Сколько бит требуется для обработки аудиосигналов? Это 16, 20, 24 или 32 бита? Требуется ли для аудиоприложения арифметические операции с фиксированной точкой с плавающей запятой? На какие нежелательные побочные эффекты квантования следует обратить внимание звукорежиссеру?
В первом разделе этого отчета кратко рассматриваются желательные характеристики DSP для использования в аудиоприложениях, а затем обсуждаются различия в форматах данных для процессоров с фиксированной и плавающей запятой.Затем исследуется взаимосвязь динамического диапазона с размером слова данных при обработке аудиосигналов. Это поможет определить, сколько битов потребуется вашему приложению, будь то дешевое потребительское устройство с низким качеством воспроизведения или высокопроизводительное профессиональное аудиоустройство с высокой точностью воспроизведения. Наконец, чтобы разработать систему со звуком CD-качества или профессионального качества, предлагается, чтобы процедура цифрового фильтра работала прозрачно, разрешающая способность системы обработки должна быть значительно выше, чем разрешение входного сигнала.Для профессиональных аудиосистем высочайшего качества в качестве предлагаемого решения предлагается 32-битный DSP.
1. Каковы преимущества использования DSP для обработки аудиосигналов?
Цифровой сигнальный процессор имеет одну цель: работать с квантованными данными сигнала как можно быстрее и эффективнее. По сравнению с типичным процессором или микроконтроллером, хорошо спроектированный DSP обычно содержит следующие желательные характеристики для выполнения вычислений DSP в реальном времени для аудиосигналов:
Быстрая и гибкая арифметика
Вычисление за один цикл для умножения с накоплением, произвольной величиной сдвига, а также стандартных арифметических и логических операций.
Расширенный динамический диапазон для вычислений расширенной суммы произведений
Расширенные суммы произведений, распространенные в алгоритмах DSP, поддерживаются в единицах умножения-накопления. Повышенная точность аккумулятора умножителя обеспечивает дополнительные биты для защиты от переполнения при последовательных сложениях, чтобы гарантировать отсутствие потери данных или диапазона.
Одноцикловая выборка двух операндов для вычисления суммы произведений
В расширенных вычислениях сумм произведений требуются две операции в каждом цикле для загрузки вычислений.DSP должен быть в состоянии поддерживать пропускную способность данных с двумя операндами, независимо от того, хранятся ли данные на кристалле или вне его.
Аппаратная поддержка кругового буфера для эффективного хранения и извлечения образцов
Большой класс алгоритмов DSP, включая цифровые фильтры, требует кольцевых буферов данных. Кольцевой буфер — это определенный программистом конечный сегмент памяти DSP, который используется для хранения выборок для обработки. Аппаратная циклическая буферизация предназначена для обеспечения возможности автоматического обхода адресного указателя до начала буфера для упрощения реализаций кольцевого буфера и, таким образом, уменьшения накладных расходов и повышения производительности.Когда круговая буферизация реализована аппаратно, программисту DSP не нужно беспокоиться о дополнительных накладных расходах на тестирование и сброс адресного указателя, чтобы он не выходил за границы буфера.
Эффективные циклы и ветвления для повторяющихся операций DSP
Алгоритмы DSP являются повторяющимися и наиболее логично выражаются в виде циклов. Для подпрограмм цифрового фильтра текущая сумма операций MAC обычно выполняется в быстрых и эффективных структурах цикла.Программный секвенсор DSP или блок управления должен позволять циклическое выполнение кода с минимальными или нулевыми накладными расходами. Любые операции тестирования ветвления, уменьшения цикла и завершения встроены в аппаратное обеспечение блока управления DSP. Кроме того, не должно возникать никаких штрафов за накладные расходы для инструкций условного ветвления, ветвление которых основано на битах состояния вычислительного блока.
Все вышеперечисленные архитектурные особенности используются для реализации операций типа DSP. Например, свертка — это обычная операция обработки сигнала, включающая умножение двух наборов дискретных данных, умножение входного сигнала на смещенную версию импульсного отклика системы и сохранение текущей суммы выходных данных.Это видно из следующего уравнения свертки [17, 18, 19, 20]:
Архитектурные особенности
DSP предназначены для выполнения этих типов дискретных математических операций как можно быстрее, обычно в пределах одного цикла команд. Внимательное изучение этого уравнения показывает элементы, необходимые для реализации. Коэффициенты фильтра и входные выборки, необходимые для реализации вышеуказанного уравнения, могут быть сохранены в двух массивах памяти, определенных как кольцевые буферы. Оба круговых буфера необходимо перемножить и добавить к результатам предыдущих итераций.Для выполнения операции, показанной выше, архитектура DSP должна позволять выполнять одно умножение вместе с добавлением к предыдущему результату за один цикл команд. В рамках того же цикла архитектура также должна содержать достаточный параллелизм в вычислительных модулях, чтобы обеспечить чтение из памяти следующей выборки и коэффициента фильтрации для следующей итерации цикла. Схема аппаратного цикла, включенная в архитектуру, позволила бы эффективно выполнять цикл через количество итераций с нулевыми накладными расходами.При использовании в цикле с нулевыми издержками реализации цифровых фильтров становятся чрезвычайно оптимизированными, поскольку не требуется явного программного декремента, команд тестирования и перехода. Таким образом, для фактической реализации операции свертки требуются два кольцевых буфера, умножители, сумматоры и конструкция цикла с нулевыми издержками. Цифровой сигнальный процессор содержит необходимые строительные блоки для выполнения операций фильтрации дискретного времени.
При выполнении этих типов повторяющихся вычислений DSP ошибки квантования из-за усечения и округления могут накапливаться со временем, ухудшая качество алгоритмического результата DSP.Число битов разрешения, используемых в арифметических вычислениях, наряду с данной реализацией структуры фильтра, будет определять надежность обработки сигнала алгоритма фильтра. В оставшейся части этой статьи будет обсуждаться, сколько битов потенциально может потребоваться для конкретного аудиоприложения, поскольку это определяется сложностью обработки и желаемым качеством целевого сигнала.
2. Числовые форматы DSP: требуются ли арифметические операции с фиксированной или плавающей запятой для моего аудиоприложения?
В зависимости от сложности приложения разработчик аудиосистемы должен решить, какая точность вычислений и динамический диапазон потребуются.В этом разделе кратко описаны наиболее распространенные собственные типы данных. 16- и 24-битные ЦСП с фиксированной точкой предназначены для вычисления целочисленной или дробной арифметики. 32-битные DSP, такие как семейство Analog Devices ADSP-2106x SHARC, традиционно предлагались как устройства с плавающей запятой, однако это популярное семейство DSP может одинаково выполнять как арифметику с плавающей запятой, так и целочисленную или дробную арифметику с фиксированной запятой.
2.1 16-, 24- и 32-разрядная арифметика с фиксированной точкой
ЦСП, которые могут выполнять операции с фиксированной точкой, обычно используют двоичную нотацию с дополнением до двух для представления сигналов.Представление формата с фиксированной точкой может быть знаковым (дополнение до двух) или беззнаковым целым или дробным обозначением. Большинство операций DSP оптимизировано для знаковой дробной записи. Например, Analog Devices ADSP-21161 поддерживает 32-битную дробную арифметику.
Числовой формат в дробной системе со знаком имеет смысл использовать в вычислениях DSP, потому что дробное представление легко соответствовало бы соотношению всего диапазона выборок, полученных с помощью 5-вольтового аналого-цифрового преобразователя, как показано на рисунке 1 ниже.Дробный результат сложнее переполнить, потому что умножение дроби на дробь дает меньшее число, которое затем либо усекается, либо округляется. Наибольшее полное положительное дробное число будет 0,99999, а максимальное отрицательное число полной шкалы — -1,0. Все, что находится между самым высоким представимым сигналом от преобразователя, будет дробным представлением «самого громкого» сигнала. Например, средняя положительная амплитуда для преобразователя будет 1/2, и это будет интерпретироваться DSP как дробное значение 0x4000.
Рис. 1. Дополнение до двоек для дискретизированных сигналов
Рис. 2. Дробный и целочисленный форматы для N-битного числа
В дробном формате предполагается, что двоичная точка находится слева от младшего разряда (знаковый бит). В целочисленном формате двоичная точка находится справа от младшего разряда (рисунок 2).
Дробная математика более интуитивно понятна для обработки сигналов, и в этой статье мы рассмотрим наименее значимые биты дробного результата, поскольку именно в этих битах более низкого порядка могут возникать ошибки квантования из-за эффектов конечной длины слова.Чем больше битов используется для представления данного аудиосигнала, тем точнее арифметический результат. Это обсуждается в Разделе 3.
2.2 32- / 40-битная арифметика с плавающей запятой
Математика с плавающей запятой предлагает гибкость в программировании, потому что намного сложнее переполнить результат, в то время как программист меньше заботится о масштабировании входных данных для предотвращения переполнения. IEEE 754/854 Данные с плавающей запятой хранятся в формате шириной 32 бита, где 24 бита представляют мантиссу, а 8 бит — показатель степени.24-битная мантисса используется для точности, а экспонента — для расширения динамического диапазона. Для 40-битной расширенной точности 32 бита используются для мантиссы, а 8 бит используются для представления экспоненты (рисунки 3 и 4).
Рис. 3. 32-битный формат с плавающей запятой одинарной точности IEEE 754/854
32-битное число с плавающей запятой представляется в десятичном виде как:
Его двоичное числовое представление формата IEEE хранится на 32-битном DSP с плавающей запятой как:
Важно знать, что стандарт IEEE всегда относится к мантиссе в формате величины со знаком, а не в формате с дополнением до двух.Таким образом, дополнительный скрытый бит эффективно повысил точность до 24 бит, а также обеспечивает любой диапазон чисел от 1 (1.0000E00) до 2 (1.1111E11), поскольку скрытый бит всегда предполагается равным 1.
Рис. 4. 40-битный формат с плавающей запятой расширенной точности
На рисунке 7 показан доступный 40-битный формат с расширенной точностью, который также поддерживается в семействе DSP ADSP-2106x. С повышенной точностью мантисса увеличивается до 32 бит. Во всем остальном это тот же формат, что и стандартный формат IEEE.Представление в двоичном числовом формате с расширенной точностью 40 бит сохраняется как:
Для обработки звука динамический диапазон с плавающей запятой может быть ненужным для некоторых алгоритмов, но гибкость программирования с плавающей запятой делает его желательным для использования, особенно для языков программирования высокого уровня, таких как C. Имейте в виду, что многие проблемы точности с фиксированной запятой, обсуждаемые в последующих разделах, по-прежнему применимы к DSP, который поддерживает арифметику с плавающей запятой, по крайней мере, с точки зрения усечения и квантования коэффициентов.Программист все еще должен преобразовать данные с фиксированной точкой, поступающие от аналого-цифрового преобразователя, в представление с плавающей точкой, в то время как результат с плавающей точкой должен быть преобразован обратно в его эквивалент с фиксированной точкой, когда данные отправляются в D / Конвертер.
Арифметика с плавающей запятой традиционно использовалась для приложений с очень высокими требованиями к динамическому диапазону, таких как обработка изображений, графика и военные / космические приложения. Предлагаемый динамический диапазон для 32-битной арифметики IEEE с плавающей запятой составляет 1530 дБ.Обычно в прошлом при принятии решения об использовании процессоров с плавающей запятой учитывались компромиссы между ценой и производительностью. До недавнего времени более высокая стоимость делала 32-битные DSP с плавающей запятой нецелесообразными для использования в аудио. Сегодня дизайнеры могут добиться высококачественного звука, используя 32-битную обработку с фиксированной или плавающей запятой, с введением более дешевых 32-битных процессоров, таких как ADSP-21161, по стоимости, сопоставимой с 16-битными и 24-битными DSP. .
3. Связь динамического диапазона с размером слова данных в цифровом аудио
Одно из главных соображений при проектировании аудиосистемы — определение приемлемого качества сигнала для приложения.В таблице 1 ниже показаны некоторые сравнения качества сигнала для некоторых аудиоприложений, устройств и оборудования [13].
Таблица 1. Динамические диапазоны
| Аудиоустройство / приложение | Динамический диапазон |
| AM Радио |
48 дБ |
| Аналоговое вещательное телевидение |
60 дБ |
| FM-радио |
70 дБ |
| Аналоговый кассетный проигрыватель |
73 дБ |
| Видеокамера |
75 дБ |
| Кодеки ADI SoundPort |
80 дБ |
| 16-битные аудиопреобразователи |
от 90 до 95 дБ |
| Цифровое вещательное телевидение |
85 дБ |
| Мини-дисковый проигрыватель |
90 дБ |
| Проигрыватель компакт-дисков |
от 92 до 96 дБ |
| 18-битные аудио преобразователи |
104 дБ |
| Цифровая аудиокассета (DAT) |
110 дБ |
| 20-битные преобразователи звука |
110 дБ |
| 24-битные аудиопреобразователи |
от 110 до 120 дБ |
| Аналоговый микрофон |
120 дБ |
Розничные продавцы и потребители аудиооборудования часто используют фразу «звук CD-качества», имея в виду звук с высоким динамическим диапазоном.Сравните качество звука проигрывателя компакт-дисков с качеством звука радиопередачи AM. Для более качественного звука компакт-диска шум не слышен, особенно во время тихих отрывков музыки. Четко слышны сигналы более низкого уровня. Но слушатель AM-радио может легко услышать низкий уровень шума на очень слышимых уровнях, где он может отвлекать слушателя. С увеличением динамических диапазонов аудиосигнала можно лучше различать звуковые сигналы низкого уровня, в то время как минимальный уровень шума снижается и становится незаметным для слушателя («минимальный уровень шума» — это термин, используемый для описания точки, в которой звук сигнал невозможно отличить от белого шума низкого уровня).
«Последние достижения в области человеческого слуха за последнее десятилетие показывают, что чувствительность человеческого уха такова, что динамический диапазон между самым тихим обнаруживаемым звуком и максимальным звуком, который может быть слышен без боли, составляет примерно 120 дБ. Дальнейшие исследования показывают, что это критически важно. важная звуковая информация на частотах до 40 кГц и, возможно, 80 кГц »
Для достижения качества сигнала CD-типа в последние годы появилась тенденция к разработке системы, которая обрабатывает аудиосигналы в цифровом виде с использованием 16-битных аналого-цифровых и цифро-аналоговых преобразователей отношения сигнал / шум (SNR) и динамического диапазона. около 90-93 дБ.При обработке этих сигналов программист обычно должен разработать алгоритм с достаточной точностью вычислений, которая обычно превышает 16 бит в сигналах компакт-диска. Звук CD-качества — лишь один из примеров. Для любого приложения разработчик аудиосистемы должен сначала определить приемлемый SNR, а затем решить, какая точность требуется для получения приемлемых результатов для предполагаемого приложения.
3.1 Что такое SNR и динамический диапазон для DSP?
В аналоговых и цифровых терминах, SNR (отношение сигнал / шум) и динамический диапазон часто используются как синонимы.В чисто аналоговых терминах SNR определяется как отношение самого большого известного сигнала, который существует, к шуму, присутствующему при отсутствии сигнала. В цифровых терминах SNR и динамический диапазон используются как синонимы для описания отношения между наибольшим представимым числом и ошибкой квантования [2]. Хорошо спроектированный цифровой фильтр должен иметь максимальное отношение сигнал / шум (SNR), которое больше, чем SNR преобразователя. Таким образом, разработчик DSP должен быть уверен, что минимальный уровень шума фильтра не превышает минимальную точность, требуемую для АЦП или ЦАП.
На рисунке 5 ниже показана взаимосвязь между динамическим диапазоном, SNR и запасом мощности:
Рис. 5. Зависимость уровня аудиосигнала (дБу) между динамическим диапазоном, SNR и запасом мощности
Вот краткое изложение терминов, показанных на рисунке 9, как они определены Дэвисом и Джонсом [3] (мы будем часто ссылаться на многие из этих терминов в этой статье):
Децибел — Используется для описания соотношения уровня звука (уровня звукового давления) или соотношения мощности и напряжения:
дБВольт = 20log (Vo / Vi), дБВт = 10log (Po / Pi), дБSPL = 20log (Po / Pi)
Динамический диапазон — Разница между самым громким и самым тихим представляемым уровнем сигнала или, если присутствует шум, разница между самым громким (максимальным уровнем) сигналом и минимальным уровнем шума.Измеряется в дБ.
Динамический диапазон = (пиковый уровень) — (минимальный уровень шума) дБ
SNR (отношение сигнал-шум, или отношение сигнал / шум) — Разница между номинальным уровнем и минимальным уровнем шума. Измеряется в дБ. Другие авторы определяют это для аналоговых систем как отношение наибольшего представленного сигнала к минимальному уровню шума при отсутствии сигнала [6], что более точно соответствует SNR для цифровой системы.
Запас — разница между номинальным линейным уровнем и пиковым уровнем, при котором происходит ограничение сигнала.Измеряется в дБ. Чем больше запас, тем лучше аудиосистема справится с очень громкими пиками сигнала до появления искажений.
Пиковый рабочий уровень — Максимально представимый уровень сигнала, при котором происходит ограничение сигнала.
Линейный уровень — Номинальный рабочий уровень (0 дБ, или, точнее, от -10 дБ до +4 дБ)
Уровень шума — Минимальный уровень шума для человеческого слуха — это средний уровень «только слышимого» белого шума .Аналоговое аудиооборудование может создавать шум от компонентов. С помощью DSP шум может возникать из-за ошибок квантования. [Можно сделать предположение, что запас мощности + отношение сигнал / шум электрического аналогового сигнала равен динамическому диапазону (хотя это не совсем точно, поскольку сигналы все еще могут быть слышны ниже минимального уровня шума)].
«Теоретически наблюдается увеличение шума квантования сигнала или динамического диапазона примерно на 6 дБ для каждого бита, добавленного к длине слова АЦП, ЦАП или DSP.»
В «реальной» обработке сигналов квантование — это процесс, с помощью которого число аппроксимируется числом конечной точности. Например, во время аналого-цифрового преобразования бесступенчато регулируемое напряжение сигнала представляется двоичным числом с фиксированным числом битов. Разница между двумя последовательными двоичными значениями называется шагом квантования или уровнем квантования. Размер шага квантования определяет эффективный минимальный уровень шума квантованного сигнала.Длина слова для данного процессора определяет количество доступных уровней квантования. Для n-битового слова данных будет получено 2n уровней квантования (некоторые примеры для общей ширины слова данных показаны в таблице 2).
Таблица 2: n-битовое слово данных дает 2n уровней квантования
| N уровней квантования для n-битных слов данных (N = 2n уровней) |
| 28 = 256 |
| 216 = 65 536 |
| 220 = 1 048 576 |
| 224 = 16 777 216 |
| 232 = 4 294 967 296 |
| 264 = 18 446 744 073 729 551 616 |
Большее количество битов, используемых для представления выборки, приведет к лучшему приближению аудиосигнала и уменьшению ошибки квантования (шума), что приводит к увеличению отношения сигнал / шум.Теоретически наблюдается увеличение шума квантования сигнала или динамического диапазона примерно на 6 дБ для каждого бита, добавленного к длине слова АЦП, ЦАП или DSP.
Рис. 6. Отношение сигнал / шум DSP / преобразователя и динамический диапазон
Обратите внимание, что «Правило 6 дБ на бит» является приближением к вычислению фактического динамического диапазона для заданной ширины слова. Максимальная представимая амплитуда сигнала до максимальной ошибки квантования для идеального аналого-цифрового преобразователя или цифровой системы на основе DSP фактически вычисляется как:
1.76 дБ основано на статистике синусоидальной формы сигнала и будет варьироваться для других сигналов, а n представляет длину слова данных преобразователя или процессора цифровых сигналов [9].
В системах на основе DSP без селитера приведенное выше определение отношения сигнал / шум не применимо напрямую, поскольку при отсутствии сигнала нет шума. В цифровых терминах динамический диапазон и SNR (рисунок 6) часто используются как синонимы для описания отношения наибольшего представимого сигнала к ошибке квантования или минимальному уровню шума [2].Следовательно, когда речь идет об SNR или динамическом диапазоне с точки зрения размера слова данных DSP и ошибок квантования, оба термина означают одно и то же.
Теперь возникает вопрос, сколько бит требуется для создания высококачественной аудиосистемы? С точки зрения динамического диапазона и отношения сигнал / шум, какую лучшую точность можно выбрать, не жертвуя низкой стоимостью в данной конструкции? Давайте сначала посмотрим, каковы сравнения динамического диапазона между DSP с разными размерами слов данных. На рисунке 7 показано соотношение динамического диапазона между тремя наиболее распространенными ширинами слова данных процессора с фиксированной запятой DSP: 16-, 24- и 32-битными.Также приведены сравнения уровней квантования. Как указывалось ранее, количество битов слова данных, используемых для представления сигнала, напрямую влияет на SNR и шум квантования, вносимый во время преобразований выборок и арифметических вычислений.
Рис. 7. Сравнение динамического диапазона DSP с фиксированной точкой
Таблица 3. Динамический диапазон по сравнению с. Разрешение
| Precision (двоичное представление с фиксированной точкой) |
Динамический диапазон (количество бит на слово данных x 6 дБ / бит или разрешение) |
| 16 бит |
96 дБ |
| 24 бита |
144 дБ |
| 32-бит |
192 дБ |
Каждый дополнительный бит разрешения, используемый DSP для вычислений, снижает мощность шума квантования на 6 дБ.16-битная числовая точность с фиксированной точкой дает 96 дБ [16 x 6 дБ на бит], 24-битная точность с фиксированной точкой дает 144 дБ [24 x 6 дБ на бит], а 32-битная точность с фиксированной точкой дает 192 дБ [ 32 x 6 дБ на бит]. Обратите внимание, что для собственных математических расчетов с одинарной точностью 16-битный DSP не подходит для точного представления полного динамического диапазона, необходимого для аудиосигналов «более высокой точности» около 120 дБ.
Что касается уровней квантования, рисунок 8 демонстрирует, как 32-битная и 24-битная обработка может более точно представлять обработанный аудиосигнал по сравнению с 16-битной обработкой.24-битная обработка может более точно представлять сигнал в 256 раз лучше, чем 16-битная обработка, в то время как 32-битная обработка может более точно представлять сигналы в 65 536 раз лучше, чем при 16-битной обработке, и в 256 раз точнее, чем у 24-битной обработки. -битный процессор.
Рис. 8. Сравнение уровней квантования DSP с фиксированной точкой
Используя «правило 6 дБ на бит», 32-битный динамический диапазон с плавающей запятой IEEE определен равным 1530 дБ. Для чисел с плавающей запятой это рассчитывается по размеру экспоненты — 6 дБ x 255 уровней экспоненты = 1530 дБ.(255 уровней происходят из-за того, что есть 8-битная экспонента). Мы видим, что для обработки звука с плавающей запятой доступен гораздо больший динамический диапазон, чем 120 дБ, требуемых для покрытия всех возможностей динамического диапазона звука человеческого уха.
3.2 Дополнительный динамический диапазон блока MAC с фиксированной точкой для предотвращения переполнения DSP
Переполнение / потеря значимости вычислений — это аппаратное ограничение, которое возникает, когда числовой результат вычисления с фиксированной точкой превышает наибольшее или наименьшее число, которое может быть представлено DSP.Многие DSP включают дополнительные биты в блок MAC, чтобы предотвратить переполнение при промежуточных вычислениях. Расширенные суммы произведений, которые являются общими для алгоритмов DSP, достигаются в блоке MAC с помощью однократных сумм умножения, помещенных в эффективную структуру цикла. Дополнительные биты точности в регистре результата сумматора обеспечивают расширенный динамический диапазон для защиты от переполнения при последовательных умножениях и сложениях. Таким образом, не происходит потери данных или диапазона. В таблице 4 показано сравнение расширенных динамических диапазонов 16-битных, 24-битных и 32-битных DSP.Обратите внимание, что 32-битный DSP ADSP-21161 SHARC имеет гораздо более широкий динамический диапазон, чем 16- и 24-битные DSP, при выполнении инструкций умножения с фиксированной точкой. Блок MAC на SHARC содержит двойные аккумуляторы, которые могут выдавать 80-битный результат с фиксированной точкой при умножении двух 32-битных значений с фиксированной точкой. Для 64-битного результата MAC есть 16 бит дополнительной точности. 80-битный результат SHARC может дать динамический диапазон с фиксированной точкой до 480 дБ для промежуточных вычислений.
Таблица 4.Сравнение расширенного динамического диапазона в умножителе DSP с фиксированной точкой
| N-битный DSP | N-бит x N-бит Умножение |
Дополнительные биты результата MAC |
Точность в регистре результатов MAC |
Получен дополнительный динамический диапазон |
Результирующий динамический диапазон MAC |
| 16-битный DSP | 32-бит |
8-бит |
40 бит |
48 дБ |
240 дБ |
| 24-битный DSP |
48-бит |
8-бит |
56-бит |
48 дБ |
336 дБ |
| 32-битный SHARC |
64-разрядная |
16 бит |
80-бит |
96 дБ |
480 дБ |
4.Учет проблем с длиной слова данных при разработке алгоритмов аудио, свободных от шумовых артефактов
Цифровая обработка сигналов часто обсуждается так, как будто обрабатываемые сигналы и арифметика фильтров, используемая для их обработки, имеют бесконечную точность. Однако все реализации DSP обязательно используют слова конечной длины для представления каждого значения, будь то выборка цифрового аудиовхода, коэффициент фильтра или результат умножения. Эта конечная точность представления означает, что любая обработка цифрового сигнала, выполняемая для получения желаемого результата, вносит неточность в результат.Если сигнал проходит несколько этапов DSP, то каждый этап будет добавлять неточность.
Эффект конечной длины слова может серьезно повлиять на качество сигнала (т.е. снизить отношение сигнал / шум в системе) и вызвать недопустимую ошибку при выполнении вычислений DSP. Нежелательные эффекты конечной точности могут быть следующими:
- Шум аналого-цифрового преобразования
Конечная точность выборки слова входных данных вносит некоторую неточность в вычисления DSP из-за нелинейностей, присущих процессу аналого-цифрового преобразования.Следовательно, точность результата арифметического вычисления не может быть больше разрешения квантованной выборки. Другими словами, процесс аналого-цифрового преобразования устанавливает минимальный уровень шума для DSP (если только цифро-аналоговый преобразователь не имеет более низкий уровень шума). Программист DSP должен убедиться, что минимальный уровень шума алгоритма обработки не превышает минимальный уровень шума аналого-цифрового преобразователя. - Ошибка квантования арифметических вычислений от усечения и округления
Алгоритмы DSP, такие как цифровые фильтры, будут генерировать результаты, которые необходимо усекать или округлять (т. Е.е. повторно квантованный). Когда результат обработки должен быть сохранен, он должен быть квантован до собственной длины слова данных процессора, что приводит к ошибке. Для рекурсивных алгоритмов DSP эти повторно квантованные значения являются частью цикла обратной связи, вызывая накопление арифметических ошибок, которые затем сокращают динамический диапазон фильтра. Чем меньше слово данных DSP, тем более вероятно, что эти типы ошибок появятся в выходном аналоговом сигнале, преобразованном в ЦАП.
В n-битовой системе с фиксированной точкой квантование результатов может рассматриваться как добавление шума к результату.Рассмотрим операцию умножения в цифровом фильтре, включая повторное квантование результата. Это можно смоделировать как умножение с бесконечной точностью, за которым следует этап сложения, на котором к произведению добавляется шум квантования, так что результат равен n-битовому числу [15].
В системе цифровой обработки сигналов операции умножения, сложения и сдвига выполняются над последовательностью n-битовых входных значений. Эти операции генерируют результаты, для точного представления которых потребуется более n битов.Решение этой проблемы обычно состоит в том, чтобы исключить младшие биты, возникающие в результате арифметической операции, чтобы получить n-битное значение, которое может быть сохранено системой.
Двумя наиболее распространенными методами удаления младших битов являются усечение и округление. Усечение выполняется простым отбрасыванием всех битов, менее значимых, чем оставшийся младший бит. Округление выполняется путем выбора n-битового числа, наиболее близкого к исходной неокругленной величине.
- Переполнение вычислений
Каждый раз, когда результат арифметического вычисления больше, чем наивысшее положительное или отрицательное значение полной шкалы, произойдет переполнение, и истинный результат будет потерян.
- Квантование коэффициента
Конечная длина слова (размер слова данных n бит) коэффициента фильтра может влиять на размещение полюса / нуля и частотную характеристику цифрового фильтра. Эта неточность может вызвать искажение частотной характеристики фильтра и, в худшем случае, нестабильность.
Ошибки в значениях коэффициентов фильтра вызывают изменения в положениях полюсов и нулей передаточной функции и, следовательно, проявляются как изменения в частотных и фазовых характеристиках фильтра. В системе DSP конечной точности таких отклонений невозможно избежать. Однако его можно уменьшить, используя более высокую точность представления коэффициентов. Эта проблема особенно важна для полюсов, близких к единичной окружности в z-плоскости, где неточность может иметь значение между стабильностью и нестабильностью.
Предельные циклы
Возникает в фильтрах IIR из-за усечения и округления результатов умножения или переполнения сложения. Они часто вызывают периодические колебания выходного результата, даже когда входной сигнал равен нулю.
За исключением шума аналого-цифрового преобразования, все другие эффекты наличия конечного размера слова данных в основном зависят от точности повторного квантования данных и типа арифметических операций, используемых в алгоритме DSP. Любая заданная структура фильтра может предложить значительно более низкий уровень шума по сравнению с другой структурой, которая выполняет ту же задачу.
«Общий динамический диапазон аудиосистемы на базе DSP настолько хорош, насколько это самое слабое звено».
В аудиосистеме на основе DSP это означает, что любой из следующих источников или устройств в цепи аудиосигнала будет определять динамический диапазон всей аудиосистемы [9]:
- «Реальный» аналоговый входной сигнал, обычно от микрофона или источника линейного уровня
- Размер слова аналого-цифрового преобразователя и ошибки преобразования
- Эффекты конечной длины слова DSP, такие как ошибки квантования, возникающие в результате усечения и округления, и квантование коэффициентов фильтра
- Размер слова цифро-аналогового преобразователя
- Схема аналогового выхода подключения к динамику
- или другое устройство на пути прохождения сигнала, которое будет дополнительно обрабатывать аудиосигнал
Таким образом, выбор компонентов и реализация цифрового фильтра также определят общее качество обработанного сигнала.Например, если у нас есть цифро-аналоговый преобразователь на 75 дБ и DSP, который может поддерживать динамический диапазон 144 дБ, общий динамический диапазон «системы» по-прежнему будет составлять только 75 дБ. Таким образом, цифро-аналоговый преобразователь является ограничивающим фактором. Даже если подумать, что DSP будет вычислять данный алгоритм и поддерживать результат с точностью 122 дБ и динамическим диапазоном, результат должен быть усечен, чтобы ЦАП мог должным образом преобразовать его обратно в аналоговый сигнал. Теперь, если будет сделан выбор в пользу высококачественных аналоговых компонентов, компонентов АЦП и ЦАП, разве не захочется быть осторожным, чтобы гарантировать, что качество сигнала поддерживается алгоритмом DSP? Затем в цифровой системе необходимо проявлять осторожность, чтобы убедиться, что DSP не является самым слабым звеном в «сигнальной цепи».
«Чтобы подпрограмма цифрового фильтра работала прозрачно, разрешающая способность системы обработки должна быть значительно выше разрешения входного сигнала, чтобы любые ошибки, вносимые арифметическими вычислениями, были меньше, чем точность АЦП или ЦАП».
Если алгоритм цифровой обработки сигнала создает артефакты шума квантования, которые превышают минимальный уровень шума входного сигнала, то эти артефакты будут слышны при определенных обстоятельствах, особенно когда входной сигнал имеет низкую интенсивность или ограниченную частоту.Следовательно, каким бы ни был динамический диапазон высококачественного аудиовхода, будь то входные выборки с 16, 20 или 24 битами, цифровая обработка, выполняемая на нем, должна быть спроектирована таким образом, чтобы шум обработки не достигал уровней, при которых он может появляются выше минимального уровня шума входа и, таким образом, становятся слышимым содержимым [см. 2-Wilson и 5-Chen]. Чтобы подпрограмма цифрового фильтра работала прозрачно, разрешающая способность системы обработки должна быть значительно выше, чем у входного сигнала, чтобы любые ошибки, вносимые арифметическими вычислениями, были меньше, чем точность АЦП или ЦАП.Для того, чтобы DSP поддерживал SNR, установленный аналого-цифровым преобразователем, все промежуточные вычисления DSP требуют использования обработки с более высокой точностью, превышающей размер входной выборки [см. 2-Wilson, 3-Dattorro, 4-Zolzer, 5-Чен, 6-Клокер, Линдсли Томпсон].
Каковы динамические диапазоны, которые необходимо поддерживать для аудио-проектов CD-качества и профессионального качества? Филдер [9] продемонстрировал, что требования к динамическому диапазону для потребительского CD-аудио требуют 16-битного преобразования / обработки, в то время как минимальное требование для профессионального аудио — 20-битное (на основе тестов восприятия, проведенных на слуховых способностях человека).Требования к традиционным приложениям динамического диапазона для высококачественной обработки звука можно разделить на две группы:
Аудиосистемы «Consumer CD-Quality» используют 16-битное преобразование с типичным динамическим диапазоном между 85-93 дБ.
Аудиосистемы «Профессиональное качество» используют преобразование 20–24 бит с динамическим диапазоном между 110–122 дБ.
5. Сохранение 16-битной точности CD-качества во время обработки DSP
Как мы видели в предыдущем разделе, при использовании DSP для обработки аудиосигналов разработчик DSP должен гарантировать, что любые ошибки квантования, вносимые арифметическими вычислениями, выполняемыми на процессоре, ниже минимального уровня шума преобразователя.Рассмотрим аудиосистему «CD-качества». Если DSP должен обрабатывать аудиоданные от 16-битного аналого-цифрового преобразователя (идеальный случай), в алгоритмическом процессе должно поддерживаться отношение сигнал / шум 96 дБ, чтобы поддерживать аудиосигнал качества компакт-диска (6×16 = 96 дБ). Поэтому важно, чтобы все промежуточные вычисления выполнялись с более высокой точностью, чем разрешение 16-битного АЦП или ЦАП [6]. Ошибки, вносимые арифметическими вычислениями, могут быть минимизированы при использовании больших размеров информационного слова для обработки аудиосигналов.Для дробной математики с фиксированной точкой мы можем визуализировать добавление дополнительных битов «места для ног», добавленных справа от младшего бита входной выборки. Большие размеры слова, используемые в арифметических операциях, гарантируют, что ошибки усечения или округления будут ниже, чем минимальный уровень шума цифро-аналогового преобразователя, если « оптимальные » алгоритмы (лучшие структуры фильтров) используются в сочетании с большая ширина слова.
Следовательно, при выборе процессора для реализации необходимо сделать выбор.Следует ли использовать DSP с меньшим словом данных с использованием математики двойной точности или следует использовать DSP с более высоким словом данных, поддерживающий математику с одинарной точностью, что более эффективно? Подсчитано, что математические операции с двойной точностью могут занимать в 4-5 раз больше накладных расходов, чем математические операции с одинарной точностью [5, 6]. Двойная точность не только увеличивает накладные расходы на вычисления для цифрового фильтра, но также удваивает требования к памяти для буфера коэффициентов фильтра и буфера входной линии задержки. Каждое приложение отличается, и хотя некоторым приложениям может хватить собственного процессора ширины слова данных меньшего размера, использование вычислений с двойной точностью, коэффициентов и промежуточного хранения происходит за счет резкого снижения пропускной способности обработки.
Чтобы наглядно увидеть преимущества большего размера слова DSP, давайте взглянем на обработку аудиосигналов от 16-битного аналого-цифрового преобразователя, динамический диапазон которого близок к теоретическому максимуму, в данном случае — 92 дБ. отношение сигнал / шум (см. рисунок 9 ниже). На рисунке 10 ниже показано концептуальное представление 16-битного слова данных, которое передается из аналого-цифрового преобразователя во внутреннюю память DSP. Обычно передача данных происходит через интерфейс последовательного порта от последовательного аналого-цифрового преобразователя, и DSP может быть сконфигурирован для автоматического выполнения прямой передачи в память (DMA) образца в схеме последовательного порта во внутреннюю память для обработки.Обратите внимание, что для 24-битных и 32-битных процессоров есть соответствующие «биты пространства для ног» ниже минимального уровня шума (справа) для защиты от ошибок квантования.
Рис. 9. Минимальный уровень шума DSP с фиксированной точкой с типичным 16-битным АЦП / ЦАП при 92 дБ
Рис. 10. 16-битные аналого-цифровые выборки при соотношении сигнал / шум 96 дБ
16-битный DSP имеет отношение сигнал / шум на 4 дБ выше, чем 92 дБ аналого-цифрового преобразователя, поэтому при арифметических вычислениях будет мало места для ошибок. Мы легко можем видеть, что для обработки звука средней и сложной сложности с использованием арифметики одинарной точности 16-битный тракт данных DSP не будет адекватным для точной обработки 16-битных выборок из-за ошибок усечения и округления, которые могут накапливаться во время выполнение алгоритма.Как показано на рисунке 11, ошибки, возникающие в результате арифметических вычислений, могут быть легко замечены выходным цифро-аналоговым преобразователем и, таким образом, становятся слышимым шумом. Например, сложные рекурсивные вычисления могут легко привести к появлению 18 дБ шума квантования, а при 16-битной ширине слова DSP ошибки будут видны ЦАП и, следовательно, будут легко услышаны слушателем.
Рис. 11. Образцы вывода 16-битного ЦАП с эффектами конечной длины
Математика с двойной точностью, очевидно, все еще может использоваться для 16-битного DSP, если доступны накладные расходы на программное обеспечение, но реальная производительность процессора будет скомпрометирована.16-битный DSP, использующий обработку с одинарной точностью, будет достаточным только для недорогих аудиоприложений, где обработка не слишком сложна, а требования к SNR составляют около 75 дБ (качество аудиокассеты).
Тот же алгоритм, реализованный на 24-битном или 32-битном DSP, гарантирует, что эти ошибки не будут обнаружены цифро-аналоговым преобразователем. Как видно на рисунке 11, даже несмотря на то, что 18 дБ шума квантования были внесены вычислениями в 24-битном и 32-битном DSP, они остаются значительно ниже минимального уровня шума 16-битного DAC, когда эти два процессора работают. точно такой же алгоритм.
24-битный DSP имеет на 8 бит ниже минимального уровня шума преобразователя, чтобы учесть ошибки. Другими словами, у нас есть 8 цифр справа от младшего бита в 16-битной входной выборке. Требуется выполнить 256 операций мультипликативной обработки, прежде чем минимальный уровень шума алгоритма превысит разрешение входной выборки.
32-битный DSP (например, ADSP-21161) имеет на 16 бит ниже минимального уровня шума при выполнении 32-битной дробной математики, что обеспечивает максимальную гибкость вычислений при разработке стабильных, бесшумных алгоритмов обработки звука.Справа от младшего бита в 16-битной входной выборке есть 16 цифр. Потребуется 65 536 операций мультипликативной обработки, прежде чем минимальный уровень шума алгоритма превысит разрешение 16-битного входа. Имея больше места для ошибок квантования, ограничения реализации фильтра, которые наблюдаются в 16- или 24-битных DSP, теперь снимаются.
Таким образом, большее количество битов, используемых для обработки аудиосигнала, приведет к уменьшению ошибки квантования (шума). Если эти ошибки остаются ниже минимального уровня шума, то сохраняется общее «SNR цифровой системы», установленное преобразователями.DSP не должен быть ограничивающим фактором качества сигнала! При использовании 16-битного преобразователя для звука CD-качества широко распространенной общей рекомендацией является использование процессора с более высоким разрешением (24 или 32-бит), поскольку дополнительная точность дает DSP возможность поддерживать отношение сигнал / шум 96 дБ, равное значению. аудиопреобразователи [2, 5, 9].
5.1 Всегда ли 24-битной обработки достаточно для поддержания 16-битной точности выборки?
Теперь может показаться, что в некоторых случаях 32-битная обработка не нужна для минимальной обработки 16-битных данных.Для поддержания динамического диапазона 96 дБ 24 бита будет достаточно для обработки 16-битного сигнала без каких-либо математических требований с двойной точностью. Но тогда возникает вопрос: достаточно ли 24-битного DSP во всех случаях, чтобы гарантировать, что шум, вносимый в вычисления DSP, никогда не превысит 16-битный минимальный уровень шума? Для умеренных и нерекурсивных операций DSP обычно достаточно 24 бита. Однако исследования, проведенные в последние годы, ясно показали, что для точной обработки 16-битных сигналов при рекурсивной обработке звука 24-битного DSP может быть недостаточно.Рекурсивные фильтры необходимы для широкого спектра аудиоприложений, таких как графические эквалайзеры, параметрические эквалайзеры и гребенчатые фильтры.
В публикации AES Journal 1993 года Р. Уилсон [2] продемонстрировал, что даже для рекурсивных вычислений БИХ-фильтра второго порядка на 24-битном DSP минимальный уровень шума цифрового фильтра может по-прежнему превышать уровень шума 16-битной выборки. и, следовательно, стали слышны. Чтобы компенсировать это, рекомендуется использовать схемы с обратной связью по ошибкам (формирование спектра ошибок) или арифметику с двойной точностью, особенно для схем с чрезвычайно критичной частотной характеристикой.Использование математики с двойной точностью может увеличить вычислительные затраты процессора более чем в пять раз при вычислениях фильтров, в то же время удваивая требования к памяти.
Другая публикация W. Chen [5] в журнале AES в марте 1996 г. пришла к такому же выводу. Чтобы поддерживать отношение сигнал / шум 96 дБ для 24-битной обработки БИХ-фильтров второго порядка, требовалась структура фильтра двойной точности, чтобы гарантировать, что минимальный уровень шума на выходе цифрового эквалайзера превышает 96 дБ.Чен исследовал различные реализации второго порядка, чтобы определить лучшую структуру при выполнении 24-битной обработки на 16-битном входе. В одном тестовом случае он реализовал одиночный фильтр верхних частот второго порядка с использованием структур прямой формы-1, обнаружив, что эти реализации дают SNR от 85 до 88 дБ, что ниже теоретического максимума 96 дБ идеального 16. -битный аналого-цифровой преобразователь.
Второй пример Чена состоит из каскадирования структур второго порядка для реализации цифрового эквалайзера шестнадцатого порядка.Затем он измерил минимальный уровень шума эквалайзера с помощью тестера Audio Precision System One, чтобы найти адекватную структуру БИХ-фильтра второго порядка, отвечающую его целевым требованиям к уровню 96 дБ. Результаты использования 24-битного DSP на 16-битной выборке показаны в таблице 5.
Таблица 5. Результаты Чена 24-битной IIR-обработки 2-го порядка на 16-битных данных [Журнал AES за март 1996 г.]
| Структура фильтра второго порядка |
Отношение сигнал / шум (дБ) Результаты для эквалайзера 16-го порядка |
| Каскадная форма |
1-75 дБ |
| Каскадная форма |
2-63 дБ |
| Каскадная транспонированная форма |
1-70 дБ |
| Каскадная форма двойной точности 1 |
-100 дБ |
| Параллельная форма 1 |
-85 дБ |
| Параллельно транспонированная Форма 1 |
-79 дБ |
Вывод Чена — чтобы поддерживать более высокое отношение сигнал / шум, превышающее 96 дБ при каскадном соединении нескольких каскадов второго порядка, требовалась арифметика двойной точности.В его оптимальной реализации фильтра прямой формы 1 с двойной точностью было увеличено количество командных циклов (увеличение в 3 раза) и увеличилось пространство памяти (увеличение в 2 раза) для хранения состояний внутреннего фильтра.
Напомним, что 32-битный DSP дает 8 дополнительных битов точности по сравнению с 24-битным процессором. Для заданной структуры фильтра второго порядка, реализованной на 24-битном процессоре, затем реализованной в 32-битном процессоре с фиксированной точкой, арифметический результат должен привести к снижению минимального уровня шума на 48 дБ.Структуры фильтров прямой формы 1 обычно являются лучшей структурой фильтров для использования в аудио, поскольку они обеспечивают более высокие шумовые характеристики [2, 3]. Например, мы можем видеть, что в результатах Чена (таблица 5) структура Parallel Form 1, использованная для создания эквалайзера, обеспечила лучший результат для 24-битных вычислений с одинарной точностью. Однако это все еще меньше, чем в идеальном случае 96 дБ. Идеальный минимальный уровень шума 24-битного процессора 144 дБ значительно повышен на 70-80 дБ и, как следствие, превышает минимальный уровень шума 16-битного преобразователя.Если тот же самый алгоритм реализован на 32-битном процессоре с фиксированной точкой, минимальный уровень шума выходного сигнала фильтра снижается на 48 дБ (с 8 дополнительными битами «пространство для ног») до 133 дБ. Этого достаточно не только для того, чтобы оставаться ниже минимального уровня шума 16-битного преобразователя, но и для 32-битной реализации структуры прямой формы 1 с одинарной точностью было бы достаточно даже для минимального уровня шума 24-битного преобразователя.
При обработке 16-битных выборок 32-битным процессором по сравнению с 24-битным процессором 8 дополнительных битов, доступных ниже минимального уровня шума, и использование 32-битных коэффициентов фильтра обеспечат отсутствие необходимости в накладных расходах с двойной точностью при использовании любой стандартной реализации БИХ-фильтра второго порядка.
6. Обработка 110–120 дБ, 20/24 бит профессионального качества звука
Когда компакт-диск был выпущен в начале 1980-х годов, цифровой формат 16-битных слов с частотой дискретизации 44,1 кГц был выбран по сочетанию технических и коммерческих причин. Выбор был ограничен качеством доступных аналого-цифровых преобразователей, качеством и стоимостью других цифровых компонентов, а также плотностью хранения цифровых данных на самом носителе. Считалось, что этого формата будет достаточно для записи аудиосигналов со всей точностью, необходимой для полного диапазона человеческого слуха.Однако исследования, проведенные с момента появления технологии компакт-дисков, показали, что этот формат в некоторых отношениях несовершенен.
Новое исследование, проведенное в течение последнего десятилетия, показывает, что чувствительность человеческого уха такова, что динамический диапазон между самым тихим обнаруживаемым звуком и максимальным звуком, который может быть слышен без боли, составляет примерно 120 дБ. Поэтому 16-битный звук CD-качества больше не считается звуком высочайшего качества, который можно сохранить и воспроизвести. Кроме того, многие аудиофилы утверждали, что звуку CD-качества не хватает определенной теплоты, которую предлагает виниловая канавка.Это могло быть связано с комбинацией ограничения динамического диапазона в 16 бит, а также с выбранной частотой дискретизации 44,1 кГц. 16-битные слова, используемые для CD, обеспечивают максимальный динамический диапазон 96 дБ, хотя с использованием дизеринга он уменьшается примерно до 93 дБ. Технология цифрового преобразования сейчас продвинулась до уровня, когда можно делать записи с динамическим диапазоном 120 дБ или больше, но компакт-диск не может их точно передать [14].
Последние технологические разработки и улучшенные знания о человеческом слухе создали потребность в большей длине слова и более высокой частоте дискретизации в профессиональном и потребительском аудио секторе.Долгое время считалось, что человеческое ухо способно слышать звуки с частотой до 20 кГц и совершенно нечувствительно к частотам выше этого значения. Это предположение было основным фактором при выборе частоты дискретизации 44,1 кГц. Новое исследование показало, что многие люди могут различать качество звука на частотах до 25 кГц, и что люди также в определенной степени чувствительны к частотам, превышающим это значение. Это исследование в основном эмпирическое, но означает, что необходима значительно более высокая частота выборки.Д. Е. Блэкмер [7] предположил, что для полного удовлетворения требований слухового восприятия человека звуковые системы должны быть спроектированы так, чтобы покрывать частотный диапазон до 40 кГц (и, возможно, до 80 кГц) с динамическим диапазоном более 120 дБ. для обработки переходных пиков. Это выходит за рамки требований многих современных цифровых аудиосистем. В результате сейчас широко доступны 18, 20 и даже 24-битные аналого-цифровые преобразователи, которые способны превышать динамический диапазон 96 дБ, доступный при использовании 16 бит.
6.1 Гонка за использование 24-битного аналого-цифрового и цифро-аналогового преобразования
Многобитные сигма-дельта-преобразователи, способные к 24-битному преобразованию, в настоящее время производятся различными производителями (Analog Devices, Crystal Semiconductor и AKM Semiconductor и др.). Популярность 24-битных цифро-аналоговых преобразователей растет как в профессиональных, так и в высокопроизводительных потребительских приложениях. Причина использования этих более точных аналого-цифровых и цифро-аналоговых преобразователей для обработки звука очевидна: характеристики искажения (линейность) этих преобразователей с более высоким разрешением намного лучше, чем у 16-битных преобразователей.Другой очевидной причиной является увеличение отношения сигнал / шум и динамический диапазон, который они обеспечивают по сравнению с технологией 16-20 бит.
«24-битный аналого-цифровой и цифро-аналоговый преобразователь обеспечивает динамический диапазон 120-122 дБ, полностью поддерживая динамический диапазон человеческого уха до порога боли в 120 дБ при частоте дискретизации 96 кГц и 192 кГц ».
Многие 24-битные преобразователи на рынке имеют диапазон от 110 до 120 дБ, что является профессиональным качеством и близко к диапазону, воспринимаемому человеческим ухом.Преобразователи более высокого уровня имеют диапазон от 117 дБ до 122 дБ (ошибки преобразования, такие как интермодуляционные искажения, вносимые 24-битными преобразователями, ограничивают конечное отношение сигнал / шум от теоретического максимума 148 дБ). Эти новые 24-битные преобразователи имеют динамический диапазон до 120–122 дБ, что позволяет легко использовать источники входного сигнала, такие как конденсаторный микрофон с низким уровнем шума на 120 дБ.
На многих конвенциях AES в последние годы производители профессионального оборудования продемонстрировали оборудование с 24-битным преобразованием и частотой дискретизации 96 кГц.Новые стандарты DVD расширяют цифровые форматы до 24-битных форматов с частотой дискретизации 96 кГц и 192 кГц. Аудио профессионального качества появляется на рынке потребительского аудио, который традиционно является рынком с менее строгими требованиями к аудио. Продолжается гонка производителей звукового оборудования, которые включают преобразователи 24-бит, 96 кГц, чтобы поддерживать качество сигнала до 120 дБ.
6.2 Сравнение 24-битной и 32-битной обработки аудиосигналов с 24-битным разрешением
В течение многих лет было широко признано, что в большинстве случаев 24-битная обработка DSP обеспечивает адекватную точность для 16-битных выборок.С появлением высокоточных 24-битных преобразователей, поддерживающих новые профессиональные и потребительские стандарты звука, какая ширина слова будет рекомендована для процессора, необходимая для поддержания 24-битной точности? Для 24-битного преобразования 24-битный DSP может больше не иметь возможности адекватно обрабатывать 24-битные выборки, не прибегая к математике с двойной точностью, особенно для рекурсивных алгоритмов IIR второго порядка. Более новая технология 24-битного преобразователя является веским аргументом в пользу 32-битной обработки. Использование 32-битного DSP уже стало предпочтительным логическим процессором для многих производителей звукового оборудования при использовании 24-битного преобразования сигнала.Давайте разберемся, почему это так.
Рисунок 12 наглядно демонстрирует типичную ситуацию, которая может возникнуть в результате умеренно сложной или рекурсивной обработки 24-битных выборок. Обратите внимание, что 24-битная выборка в этом случае предполагает дробное число 1,23, интерпретируемое 24-битными преобразователями. Дополнительные биты точности, которые 32-битная обработка с фиксированной точкой обеспечивает справа от 24-битного входного LSB. Например, параллельная комбинация БИХ-фильтров второго порядка может привести к значительным артефактам квантования в битах более низкого порядка слова данных.Если и 24-битный, и 32-битный в конечном итоге приводят к возникновению ошибок, которые приводят к появлению шума в 24 дБ (4 бита x 6 дБ / бит), ошибка будет отображаться на 24-битном ЦАП, поскольку 24-битный ЦАП DSP дает результат выше минимального уровня шума. Вычисления с одинарной точностью с 24-битной обработкой могут ограничить результат обработанного ввода примерно до 15-битной точности. Следует ли использовать процедуры двойной точности на 24-битном процессоре или следует выбрать 32-битный процессор при использовании 24-битного преобразователя? При использовании 32-битного процессора ошибки, возникающие во время вычислений, никогда не будут обнаружены 24-битным цифро-аналоговым преобразователем с уровнем шума 120 дБ.
Рис. 12. 24-битные дискретные выходы ЦАП с эффектами конечной длины
Напомним, в разделе 5 анализ исследований Уилсона и Чена показал, что даже для конструкций БИХ-фильтров второго порядка с использованием 24-битного процессора может потребоваться использование дополнительных вычислений с обратной связью по ошибке или математических вычислений с двойной точностью, чтобы гарантировать, что минимальный уровень шума остается ниже. что 16-битный преобразователь. Если 24-битные вычисления могут привести к появлению шумовых артефактов, которые могут превышать 16-битный минимальный уровень шума для сложных фильтров второго порядка, что это означает? Мы можем сделать вывод, что 24-битный DSP, обрабатывающий 24-битные выборки, приведет к тому, что минимальный уровень шума цифрового фильтра всегда будет больше минимального уровня шума 24-битного преобразователя, если не будут реализованы методы для уменьшения минимального уровня шума цифрового фильтра.Эти дорогостоящие методы реализации схем обратной связи с ошибками и арифметики двойной точности неизбежны и могут добавить значительные накладные расходы при обработке 24-битных аудиоданных.
Поскольку многие производители преобразователей вводят 24-битные аналого-цифровые и цифро-аналоговые преобразователи для соответствия новым потребительским и профессиональным аудиостандартам, аудиосистемам, использующим эти преобразователи с более высоким разрешением, потребуется как минимум 32-битная обработка, чтобы обеспечить достаточную точность для обеспечения что артефакты шума квантования алгоритма фильтрации не превышают 24-битный входной сигнал.Если оптимальные процедуры фильтрации используются для сложной обработки, любой шум квантования, вносимый в 32-битные вычисления, никогда не будет замечен 24-битным выходным цифро-аналоговым преобразователем. Во многих случаях звукорежиссер может выбирать из ряда структур второго порядка, потому что результат все равно будет больше 120 дБ. 32-битная обработка гарантирует, что шумовые артефакты останутся ниже минимального уровня шума в 120 дБ, и, следовательно, обеспечит динамический диапазон аудиосигнала до порога боли человеческого уха.Таким образом, цель разработки надежных звуковых алгоритмов достигнута, и единственным ограничивающим фактором при проверке качества сигнала (SNR) цифровой аудиосистемы является точность 24-битных аналого-цифровых и цифро-аналоговых преобразователей.
7. Сводка требований к размеру слова данных для обработки аудиосигналов
Чтобы поддерживать высокое качество аудиосигнала значительно выше минимального уровня шума, все промежуточные вычисления DSP должны выполняться с более высокой точностью, чем длина в битах квантованных входных данных.Между памятью DSP и вычислительными блоками также следует использовать высокоточное хранилище. Использование «оптимальных» алгоритмов фильтрации, более точных коэффициентов фильтрации и более точного хранения промежуточных отсчетов (доступного с повышенной точностью в блоке MAC) гарантирует, что ошибки, вносимые арифметическими вычислениями, намного меньше, чем ошибка, вносимая преобразованием. результатов с помощью ЦАП. Следовательно, минимальный уровень шума алгоритма цифрового фильтра будет ниже, чем разрешение аналого-цифрового и цифро-аналогового преобразователей.
16-битный DSP может быть достаточным для недорогих аудиоприложений, где обработка не является сложной, а требования к SNR составляют около 75 дБ. Однако 16-битные DSP, использующие вычисления с одинарной точностью, не подходят для точной обработки 16-битных сигналов. При использовании 16-битных аналого-цифровых и цифро-аналоговых преобразователей в аудиосистеме, которая будет обрабатывать сигналы CD-качества с динамическим диапазоном 90 — 96 дБ, 16-битный тракт данных может оказаться недостаточным из-за ошибок усечения и округления. накапливается во время выполнения алгоритма DSP.Подпрограммы двойной точности могут использоваться для снижения минимального уровня шума цифрового фильтра, пока доступны служебные данные программного обеспечения.
В то время как сложность новых алгоритмов DSP возрастает по мере роста стандартов и требований аудио, разработчики обращаются к 18-битным, 20-битным и 24-битным преобразователям для повышения качества сигнала. 16-битного DSP будет недостаточно из-за того, что возможности динамического диапазона этого преобразователя с более высоким разрешением превышают возможности 16-битного процессора DSP. Однако 16-битный DSP может по-прежнему иметь возможность взаимодействовать с этими преобразователями более высокой точности, но тогда для этого потребуется использовать арифметику с двойной точностью.Операции с двойной точностью замедляют реальную производительность процессора, увеличивая сложность программирования. Требования к памяти для математических операций с двойной точностью удваиваются. Даже если можно использовать математику с двойной точностью, для интерфейсов этих преобразователей с более высокой точностью во многих случаях потребуется связующая логика для перемещения данных в / из DSP.
Для сохранения качества 16 бит при обработке требуется минимум 24 бита. Однако даже при 24-битной обработке было продемонстрировано, что необходимо следить за тем, чтобы минимальный уровень шума алгоритма цифрового фильтра не превышал установленный минимальный уровень шума 16-битного сигнала, особенно для рекурсивных звуковых фильтров с БИХ-фильтром. .Рекурсивные БИХ-фильтры могут вносить шум квантования выше минимального уровня шума 16-битного преобразователя при использовании 24-битного DSP [2, 5], и поэтому 24-битная обработка требует дополнительных затрат программного обеспечения для снижения минимального уровня шума цифрового фильтра. Опять же, математика с двойной точностью — это вариант, но это может увеличить накладные расходы в пять раз.
Использование 32-битного DSP с фиксированной точкой дает дополнительное преимущество, гарантируя, что качество 16-битного сигнала не ухудшится во время арифметических вычислений. Таким образом, более высокое разрешение 32-битного DSP устранит шум квантования от появления на выходе цифро-аналогового преобразователя, обеспечивая улучшенное отношение сигнал / шум (SNR) по сравнению с 16- и 24-битными DSP.
При обработке 16-битных аудиоданных использование 32-битной обработки особенно полезно для сложной рекурсивной обработки с использованием IIR-фильтров. Например, реализации параметрического и графического эквалайзера с использованием каскадных БИХ-фильтров 2-го порядка и гребенчатых / многопроходных фильтров для звука более надежны при использовании 32-битной математики. 32-разрядный процессор, работающий с 16- или 20-разрядными данными, снимает ограничения реализации структуры фильтра, которые присутствуют для 24-разрядных процессоров. Тогда можно использовать любую структуру фильтра по выбору, не беспокоясь об уровне минимального шума.Таким образом, исключаются схемы двойной точности и обратной связи по ошибкам. При 16-битном уровне ниже минимального уровня шума на 32-битном DSP ошибки квантования должны были бы накапливаться до 96 дБ от младшего разряда, прежде чем эти ошибки могут быть обнаружены 16-битным цифро-аналоговым преобразователем.
По крайней мере, 32 бита требуется, если 24-битные сигналы должны быть сохранены при сложной, математической или рекурсивной обработке. Для использования 24-битных аналого-цифровых и цифро-аналоговых преобразователей потребуется 32-битный DSP, чтобы обеспечить достаточную точность, чтобы минимальный уровень шума алгоритма не превышал 24-битный входной сигнал.
32-битная способность ADSP-21161 снижает нагрузку на программиста DSP, гарантируя, что ошибка квантования вычислений не превышает минимального уровня шума АЦП / ЦАП. 32-битная обработка ADSP-21161 может дать дополнительные 48 дБ с 8 дополнительными « защитными » битами в младших разрядах по сравнению с 24-битным процессором, чтобы гарантировать, что качество 16-битного сигнала не ухудшится во время вычислений рекурсивного фильтра или нескольких этапов обработки перед получение окончательного результата для ЦАП.ADSP-21161 обеспечивает более точное размещение полюсов / нулей с 32-битной точностью с использованием собственной арифметики с одинарной точностью.
32-битные операции с плавающей запятой содержат 24-битную точность с динамическим диапазоном более 1500 дБ. Более широкий динамический диапазон вычислений с плавающей запятой может практически устранить необходимость масштабирования входных выборок для предотвращения переполнения. 40-битные операции с плавающей запятой ADSP-21161 имеют такую же точность, как 32-битные вычисления с фиксированной запятой с 32-битной мантиссой.Динамический диапазон эквивалентен 32-битным операциям с плавающей запятой.
8. ADSP-21161 SIMD SHARC DSP — лучший 32-битный процессор для настоящего и будущего аудио DSP
16-, 20- и даже 24-битные цифровые сигнальные процессоры с фиксированной точкой, используемые сегодня в большинстве цифровых аудиопродуктов, достигают точки, когда их производительность уже недостаточна для удовлетворения потребностей как устоявшихся, так и появляющихся цифровых технологий. аудиорынки.
Чтобы полностью реализовать потенциал новейших цифровых аудиоформатов сейчас и в будущем, требуются более быстрые и гибкие DSP с более точной и более мощной арифметикой.Одним из таких процессоров является Analog Devices ADSP-21161, способный выполнять арифметические операции как с фиксированной, так и с плавающей запятой. Процессор ADSP-21161 содержит ядро SHARC SIMD ADSP-2116x (процессор SIMD использует два идентичных набора ALU, MAC и Shifter), а его двойной вычислительный блок поддерживает следующие типы данных:
- 32-битная фиксированная точка
- 32-битный IEEE 754/854 с плавающей запятой
- 40-битная с плавающей запятой
«32-битная обработка требуется, если 24-битные аудиосигналы должны быть сохранены для сложной, требующей больших вычислительных ресурсов или рекурсивной обработки аудио.32-битный DSP, такой как ADSP-21161, обеспечивает достаточную точность, чтобы минимальный уровень шума алгоритма не превышал 24-битный входной сигнал ».
Большинство приложений DSP в секторе потребительского аудио в настоящее время используют 16- или 24-битные DSP с фиксированной точкой для обработки звука. Однако по мере того, как рынок профессионального и потребительского аудио расширяется с точки зрения разнообразия и требований к высокому качеству воспроизведения, эти технологии DSP больше не будут соответствовать требованиям для обеспечения точности и гибкости требуемой обработки DSP.Три типа данных, поддерживаемые ADSP-21161, делают его идеальным для удовлетворения потребности в улучшенном качестве звука. Кроме того, ADSP-21161 включает в себя множество других функций, которые делают его очень гибким и способным удовлетворить потребности разработчиков для самых разных приложений. Эти другие функции включают:
- 100 МГц обеспечивает 200 MIPS, 600 MFLOPS
- 1 Мегабит внутренней памяти
- 2 порта для выделенного межпроцессорного обмена данными на 100 МГц
- 8 двунаправленных каналов последовательной передачи данных Поддержка
- I2S обеспечивает 16 программируемых аудиоканалов, настраиваемых как входы или выходы
- 12 программируемых контактов ввода / вывода для выполнения служебных задач типа «микроконтроллер»
- 2 внешних порта и 8 последовательных портов DMA каналов
- Бесклеевая многопроцессорная обработка с использованием до шести ADSP-21161 в кластере
- Интерфейс SDRAM для массового хранения длинных линий задержки звука
использованная литература
[01] Гэри Дэвис и Ральф Джонс, «Справочник по звукоусилению, 2-е издание», гл.14, стр. 259-278, Yamaha Corporation of America, (1989, 1990)
[02] Р. Уилсон, «Топологии фильтров», J. Audio Engineering Society, том 41, № 9, сентябрь 1993 г.
[03] Дж. Датторро, «Реализация цифровых фильтров для высококачественного звука», Audio in Digital Times, Proc. Аудио En g. Soc. 7-й Интер. Conf., Торонто, Онтарио, Канада, 14-17 мая 1989 г., стр. 165-180
[04] Удо Золзер, «Анализ ошибок округления цифровых фильтров», J. Audio Engineering Society, Vol 42, No.4 апреля 1994 г.
[05] В. Чен, «Характеристики каскадных и параллельных БИХ-фильтров», J. Audio Engineering Society, том 44, № 3, март 1996 г.
[06] К. Л. Клокер, Б. Л. Линдсли, C.D. Томпсон, «Архитектуры СБИС для обработки цифровых аудиосигналов», Audio in Digital Times, Proc. Аудио En g. Soc. 7-й Интер. Conf., Торонто, Онтарио, Канада, 14-17 мая 1989 г., стр. 313-325
[07] Д. Э. Блэкмер, «Мир за пределами 20 кГц», Studio Sound, стр. 92–94, январь 1999 г.
[08] Э.Купер и Р. Прайс, «Минимизация эффектов квантования в процессорах цифровых сигналов», Труды технической программы DSPx 1994, 15-18 мая 1995 г., Конференц-центр Сан-Хосе, Сан-Хосе, Калифорния, стр. 53-72, (1995)
[09] Л. Д. Филдер, «Возможности человеческого слуха и их последствия при проектировании цифро-аудио преобразователей», Audio in Digital Times, Proc. Аудио En g. Soc. 7-й Интер. Conf., Торонто, Онтарио, Канада, 14-17 мая 1989 г., стр. 45-62.
[10] W. A. Yost, D.W. Nielsen, Основы слуха, второе издание, Holt, Rinehart and Winston, Inc., Чикаго, Иллинойс, (1985). ISBN 0-03-069621-6
[11] В. Р. Землин, Наука о речи и слухе — анатомия и физиология, третье издание, Prentice Hall, Englewood, Cliffs, New Jersey 07632, (1988), ISBN 0-13-827429-0
[12] Дж. Кац, Справочник по клинической аудиологии, третье издание, Уильямс и Уилкинс, Балтимор, Мэриленд, (1985), ISBN 0-683-04549-0
[13] Дж. Томаракос и Д. Леджер, «ЦОСы для цифровых аудиоприложений: Часть 1», Дизайн мультимедийных систем, Miller Freeman, Inc., Сан-Франциско, Калифорния, июль 1999 г.
[14] Дж. Томаракос и К. Дагган, «32-битная архитектура SIMD SHARC для приложений обработки цифровых аудиосигналов», J. Audio Engineering Society, Том 48, № 3, март 2000 г.
[15] Официальный документ Analog Devices, ADSP-21065L: Недорогая 32-битная обработка для высококачественного цифрового звука, Analog Devices, 3 Technology Way, Норвуд, Массачусетс, ноябрь 1997 г.
[16] С. П. Липшиц, Р. А. Ваннамейкер и Дж. Вандеркой, «Квантование и дизеринг: теоретический обзор», J.Audio Engineering Society, Том 40, № 5, май 1992 г.
[17] Стивен В. Смит, Руководство для ученых и инженеров по цифровой обработке сигналов. California Technical Publishing, Сан-Диего, Калифорния, (1998)
[18] С. Дж. Орфанидис, Введение в обработку сигналов, глава 8, раздел 8.2, стр. 355-383, Prentice Hall, Englewood Cliffs, NJ, (1996)
[19] Дж. Г. Проакис и Д. Г. Манолакис, Введение в цифровую обработку сигналов, Macmillan Publishing Company, Нью-Йорк, Нью-Йорк, (1988)
[20] А.В. Оппенгейм и Р. В. Шафер, Обработка сигналов в дискретном времени, Prentice Hall, Englewood Cliffs, NJ, (1989)
[21] П. Лэпсли, Дж. Бир, А. Шохам и Э. А. Ли, Основы процессоров DSP: архитектуры и особенности, Berkley Design Technology, Inc., Фремонт, Калифорния, (1996)
[22] Дж. Бир, П. Лэпсли и Г. Блалок, «Выбор процессора DSP», Embedded Systems Programming, стр. 85-97, (октябрь 1996 г.)
[23] К. Богданович и Р. Белчер, «Использование нескольких процессоров для звуковых эффектов в реальном времени», Audio in Digital Times, Proc.Аудио En g. Soc. 7-й Интер. Conf., Торонто, Онтарио, Канада, 14-17 мая 1989 г., стр. 337-342
[24] Р. Бристоу-Джонсон, «Эквивалентность различных методов вычисления биквадратных коэффициентов для аудиопараметрических эквалайзеров», представленный на 97-м съезде AES, J. Audio Engineering Soc. (Препринт тезисов 3096), том 42, стр. 1062-1063, (декабрь 1994)
[25] Д. Дж. Шпак, «Аналитический дизайн секций биквадратного фильтра для параметрических фильтров», J. Audio Engineering Soc., Том 40, № 11, стр.876-885, (ноябрь 1992 г.)
[26] С. Дж. Орфанидис, «Дизайн цифрового параметрического эквалайзера с заданным усилением частоты Найквиста», J. Audio Engineering Soc., Vol. 45, No. 6, pp. 444 — 455, июнь 1997 г.
[27] Analog Devices, Inc, ADSP-21065L Руководство пользователя SHARC, второе издание, Analog Devices, 3 Technology Way, Норвуд, Массачусетс (1996)
[28] Д. К. Мэсси, «Инженерное исследование четырехкратно нормализованного лестничного фильтра», J. Audio Engineering Soc., Том 41, № 7/8, стр.564-582, июль / август 1993 г.
[29] Д. П. Вайс, «Опыт использования цифрового сигнального процессора AT&T DSP32 в приложениях цифрового звука», Audio in Digital Times, Proc. Аудио En g. Soc. 7-й Интер. Conf., Торонто, Онтарио, Канада, 14-17 мая 1989 г., стр. 343-351
[30] К. Андертон, Домашняя запись для музыкантов, Amsco Publications, Нью-Йорк, Нью-Йорк, (1996)
[31] Б. Гибсон, Курс домашней записи AudioPro, MixBooks, Эмеривилл, Калифорния, (1996)
[32] Доминик Милано, Многодорожечная запись, Техническое и творческое руководство для музыканта и домашнего рекордера, перепечатано из журнала The Keyboard, гл.2, стр. 37-50. Hal Leonard Books, 8112 W. Bluemound Road, Milwaukee, WI (1988)
Глоссарий некоторых общих терминов для аналого-цифровых и аналогово-цифровых преобразователей
Отношение сигнал / шум (SNR или S / N)
Это отношение входного сигнала S к фоновому шуму N в системе. Для идеального аналого-цифрового преобразователя с синусоидальным входом отношение сигнал / шум к разрешающей способности n равно SNR (RMS) = 6,02n + 1,76 дБ.
Таким образом, разрешение и уровень квантования будут определять минимальный уровень шума.Случайный системный шум снижает отношение сигнал / шум.
Ошибка квантования
Все АЦП будут иметь по крайней мере минимальную ошибку в результате дискретных или конечных характеристик, которые представляют аналоговый вход, и эта ошибка прямо пропорциональна разрешению.
Ошибка неопределенности квантования = +/- .5 LSB
(без паразитных составляющих) Динамический диапазон
Это отношение полномасштабного входного или выходного сигнала к амплитуде наивысшей гармонической или паразитной составляющей шума на входе / выходе.По сути, это показатель того, насколько можно опуститься ниже полномасштабного входного сигнала без появления шума или искажений. Обычно это значение измеряется от 0 до 20 кГц и выражается в децибелах (дБ). Динамический диапазон измеряется с входным сигналом -60 дБ и рассчитывается следующим образом:
Динамический диапазон = (S / [THD + N]) + 60 дБ
Динамический диапазон цифрового сигнала определяется как отношение максимального полное представление сигнала до наименьшего сигнала, который может представить DSP или преобразователь.Для N-битной системы это отношение теоретически равно 6,02N.
Примечание: паразитные гармоники ниже уровня шума при входном уровне -60 дБ, поэтому уровень шума определяет динамический диапазон. Это рекомендация AES и EIAJ.
Суммарные гармонические искажения
Очень важная спецификация в аудиосистемах, THD определяется как RMS (среднеквадратичное) отношение суммы всех спектральных компонентов (амплитуд гармонических искажений) к исходному полномасштабному входному сигналу. амплитуда.Это вызвано нелинейностями аналого-цифрового преобразователя.
Суммарные гармонические искажения + шум (THD + N)
Отношение среднеквадратичного значения полномасштабного основного входного сигнала к среднеквадратичной сумме всех других спектральных компонентов в полосе пропускания, выраженное в децибелах (дБ). ) и проценты.
Уровни сигнала и динамический диапазон — наушники и конфеты
Если у вас есть несколько аудиоустройств в цепочке (скажем, проигрыватель компакт-дисков, подключенный к предусилителю, подключенному к усилителю мощности, подключенному к громкоговорителю), то одна из самых простых вещей, которые вы можете сделать, чтобы улучшить или оптимизировать качество звука, — это следить за усилением сигнала через систему.К тому же это бесплатно, а получить много бесплатно — это всегда хорошо…
Давайте начнем с простого взгляда на одно устройство — аудиосистему. Неважно, что это за оборудование — это может быть MP3-плеер или гигантский микшерный пульт. Что мы сделаем, так это просто посмотрим на вывод этого устройства, поскольку оно пытается воспроизвести аудиосигнал с различным уровнем.
Рис. 1. Звуковое устройство со звуковым сигналом на выходе. Источник сигнала может быть внешним (например, другое устройство) или внутренним (например, компакт-диск или файл MP3).Давайте использовать очень простой пример синусоидальной волны в качестве нашего звукового сигнала; мы посмотрим на выходной сигнал аудиоустройства, когда мы увеличим уровень нашей синусоидальной волны от очень тихого до очень громкого.
Рис. 2: Запись выходного сигнала нашего аудиоустройства при воспроизведении синусоидального тона от очень, очень тихого до очень громкого.Этот снимок экрана, показанный на Рисунке 2, сам по себе не так уж и интересен. Давайте увеличим масштаб до трех точек на графике, чтобы увидеть, что происходит.
Рис. 3. Точка «А» на рис. 2 в увеличенном масштабе. Обратите внимание, что это не синусоидальный тон — это шум, создаваемый устройством, которое мы тестируем. Синусоидальный тон тише, чем этот «минимальный уровень шума», поэтому мы не можем его видеть (или слышать).
На рис. 3 в увеличенном масштабе показана точка «А» на рис. 2. Обратите внимание, что вы не можете увидеть синусоидальную волну в этом сигнале — это просто шум. Это тот шум, который по какой-то причине генерируется устройством естественным образом. Это может быть естественный шум в аналоговой цепи — вызванный тепловым движением электронов в резисторах, усиленный самим устройством. Это может быть преднамеренный шум, такой как дизеринг, который добавляется к сигналу для рандомизации ошибок в цифровой звуковой цепи. Или это может быть что-то совсем другое…
Но будьте осторожны, чтобы не делать поспешных выводов … Тот факт, что вы не видите синусоидальную волну, не означает, что вы не сможете ее услышать.По мере увеличения уровня синусоидальной волны мы сможем услышать ее вместе с шумом, прежде чем сможем увидеть ее на экране.
В этом случае у нас очень низкое «отношение сигнал / шум». Другими словами, деление уровня сигнала (синусоидальной волны) на (потому что это соотношение) уровень шума дает нам небольшое число. Или, говоря обычным языком — синусоида «заглушается» шумом.
Рис. 4: Точка «B» на рис. 2 в увеличенном масштабе.
На рис. 4 показана красивая чистая синусоида, выходящая из нашего аудиоустройства.Это то, что происходит в точке «B» на рисунке 2. Мы увеличили масштаб так сильно, что вы не можете увидеть повышение уровня с течением времени, но поверьте мне, это происходит именно там.
Шум все еще присутствует, «на волне» синусоидального тона. Фактически, если бы мы увеличили синусоидальную волну на этом рисунке, мы увидели бы тот же вид шума, который мы видели на рисунке 3, — например, небольшую рябь на больших океанских волнах. Однако теперь синусоида намного громче, чем шум, поэтому у нас достаточно высокое «отношение сигнал / шум».Другими словами, деление уровня сигнала (синусоидальной волны) на (потому что это соотношение) уровень шума дает нам большое число. Или, говоря обычным языком — синусоида «заглушает» шум.
Рис. 5. Мы зашли слишком далеко в нашем аудиоустройстве, сделав синусоидальную волну громче, чем она может быть.
На рисунке 5 показано, что происходит в точке «C» на рисунке 2. Обратите внимание, что это больше не похоже на синусоидальную волну — верх и низ были срезаны или «обрезаны».Это произошло из-за того, что мы пытаемся сделать наше аудиоустройство выходным уровнем, выходящим за рамки его возможностей. По мере увеличения синусоидальной волны аудиоустройство следует за ней до тех пор, пока его выходной сигнал не перестанет увеличиваться, поэтому он останавливается и удерживает этот выходной уровень до тех пор, пока синусоида не вернется вниз.
На данный момент уровень шума все еще намного ниже, чем уровень сигнала, но мы создали проблему — входной сигнал является синусоидальным, а выходным — нет. Другими словами, мы имеем искаженную форму звукового сигнала.
Обратите внимание, что искажение аудиосигнала может принимать бесконечное количество форм. Примером здесь является симметричное ограничение сигнала — это то, что многие люди имеют в виду, когда говорят «искаженный», — но не дайте себя обмануть… «Искажение» означает гораздо больше, чем это.
Итак, до сих пор есть мораль: каждое аудиоустройство имеет верхний и нижний предел уровня звука. (Да, даже у провода есть нижний предел, установленный тепловым шумом в электронах, который он содержит, и верхний предел, установленный величиной тока, через который он пройдет до плавления.) Этот динамический диапазон или динамический диапазон (надеюсь) большой — другими словами, минимальный уровень шума (самый тихий звук) должен быть НАМНОГО тише, чем только что обрезанный сигнал (самый громкий звук). Поскольку эта разница настолько велика, мы будем измерять ее в децибелах (по той же причине нет смысла измерять скорость автомобиля в миллиметрах в год или площадь Канады в квадратных микрометрах).
Мы также можем представить эти два числа (уровень минимального шума и уровень только что обрезанного сигнала) как два значения относительно друг друга.Скажем, для того, чтобы числа были красивыми, у нас есть аудиоустройство, у которого так получилось, что уровень шума на 100 дБ ниже уровня сигнала, который только начинает обрезаться на его выходе.
Рис. 6. Другой способ представления динамического диапазона аудиоустройства или системы.На рис. 6 показан один из способов это представить. Красный вертикальный прямоугольник слева показывает диапазон уровней звука, который можно достичь с помощью «Устройства №1». Он имеет минимальный уровень шума 10 мкВ и ограничивается при 1 В, поэтому общий динамический диапазон составляет 100 дБ.Поскольку в этом примере устройство №1 является единственным устройством в нашей аудиосистеме, динамический диапазон всей системы также составляет 100 дБ (показанный как прямоугольник езды справа), поскольку вся система состоит только из одного устройства.
Что произойдет, если мы добавим еще одно устройство в нашу цепочку? Предположим, например, что мы добавляем в систему второе устройство после устройства №1. Предположим также, что устройство №2 может воспроизводить более громкие сигналы, чем устройство №1, и у него более низкий уровень шума, как показано на рисунке 7.
Рис. 7. Аудиосистема с двумя устройствами в цепи. У второго устройства более широкий динамический диапазон, чем у первого.На рис. 7 следует обратить внимание на три вещи:
- Устройство № 2 может играть громче, чем Устройство № 1
- Устройство № 2 имеет более низкий уровень шума, чем Устройство № 1
- Следовательно, устройство №2 имеет более широкий динамический диапазон, чем устройство №1.
- Динамический диапазон всей системы устанавливается устройством №1, так как он не ограничивается устройством №2.
Однако здесь следует быть осторожными.Тот факт, что Устройство №2 имеет более широкий динамический диапазон, чем Устройство №1, не означает автоматически, что вся система имеет динамический диапазон, который определяется «самым слабым звеном» (Устройство №1). Взгляните, например, на рисунок 8.
Рис. 8: Система с теми же устройствами, что и на рис. 7, но общий максимальный динамический диапазон снизился на 10 дБ.На рисунке 8 мы не изменили устройства — устройство № 2 по-прежнему имеет динамический диапазон 120 дБ — но общая система имеет динамический диапазон, который уменьшен до 90 дБ из-за выравнивания уровней в системе.Теперь минимальный уровень шума системы исходит от устройства №2, потому что мы не позаботились о настройке выравнивания уровней устройств.
Другой способ думать об этом: устройство №2 настроено с ожиданием, что оно будет работать намного громче, но это не так из-за ограничений устройства №1. Из-за этой неправильной настройки шум, который вы слышите на выходе системы, исходит от устройства №2.
Пример системы, подобной показанной на рисунке 8, — это когда вы подключаете выход низкого уровня аудиоустройства (скажем, разъем для наушников вашего компьютера или телефона) к лучшему устройству, которое создано для обработки гораздо более высокого входного уровня. .Возможный результат состоит в том, что «запас» (количество, на которое лучшее устройство может обрабатывать сигналы более высокого уровня) тратится впустую (поскольку устройство более низкого качества не обеспечивает эти высокие уровни), и вся система в целом имеет ухудшенный динамический диапазон.
Итак, мораль этой истории заключается в том, что вы всегда должны стараться обеспечить, чтобы динамический диапазон вашей системы не ограничивался способом ее подключения.
Например, если у вас есть система с регулируемой входной чувствительностью, вы должны настроить ее так, чтобы вход не ожидал более высокого уровня, чем может доставить устройство, которое его подает.Если ваше устройство вывода может выдавать максимум только 2 В RMS, это бесполезно, если устройство, к которому оно подключено, «ожидает» увидеть исходящее от него 4 В. Если все устроено так, то вы можете «выбросить» 6 дБ динамического диапазона (потому что 4 В на 6 дБ громче, чем 2 В).
Как правило, есть два хороших «практических правила», которые могут вам здесь помочь.
Первый — попытаться максимально выровнять все свои максимальные уровни. Итак, как в последнем примере выше, если ваше исходное устройство имеет максимальный выход 2.0 В RMS, установите входную чувствительность вашего следующего устройства на «ожидаемое» 2,0 В RMS максимум. Это приведет к выравниванию верхних частей красных прямоугольников, а динамический диапазон будет определяться худшим звеном в цепочке, а не способом подключения устройств.
Второе практическое правило — ставить как можно больше прибыли в начало цепочки. Это особенно верно, если вы работаете в студии звукозаписи. Это потому, что каждая часть механизма вносит шум в звуковой сигнал.Если вы поместите все усиление в конец цепочки, тогда вы сделаете сигнал громче, но вы также сделаете громче весь шум от всего оборудования «вверх по потоку». Если вы поместите все усиление в начало цепочки, то вы можете оказаться в ситуации, когда вам нужно УПРАВИТЬ сигнал через цепочку, которые уменьшают ваш сигнал до правильного уровня и снижают уровень шума вместе с ним. . (Два очевидных примера — использование большого усиления на микрофонном предусилителе в студии звукозаписи или получение предусилителя RIAA с нормальным выходным уровнем для вашего проигрывателя виниловых пластинок…) Еще одним хорошим примером этого является случай, когда у вас есть выход на наушники от Ваш телефон подключен к входу AUX небольшой стереосистемы.Вы хотите как можно сильнее увеличить громкость телефона и уменьшить громкость стерео. Если вы сделаете обратное, вы будете использовать стереосистему для увеличения уровня шума вашего телефона.
И последнее: цифровое подключение устройств, вероятно, поможет с вашим динамическим диапазоном, однако это не всегда так. Конечно, нельзя сделать автоматический вывод о том, что цифровое соединение во всех отношениях лучше аналогового — или наоборот. Например, в некоторых случаях ошибки в преобразователе частоты дискретизации на этапе цифрового ввода могут привести к более высокому уровню «минимального шума», чем аналоговый шум, вызванный аналого-цифровым преобразователем на том же устройстве.Или, возможно, эти два входа имеют одинаковый измеримый минимальный уровень шума, но эти два шума имеют очень разные характеристики. Обычно аналоговый шум не зависит от программы, то есть не связан с сигналом, тогда как плохо реализованная цифровая передача и обработка обычно приводят к программно-зависимым ошибкам. Они могут быть интерпретированы слушателем как часть сигнала (больше похожи на артефакты искажения, чем на шум) и, следовательно, будут разными для разных сигналов.Чтобы еще больше запутать ситуацию, разные цифровые входы на одном и том же устройстве (например, оптический, S / P-DIF и HDMI) могут (или не могут) вести себя по-разному, поэтому любые решения, которые вы принимаете в отношении одного из них, могут (или не могут) ) применимо к остальным…
Динамический диапазон (DNR) и отношение сигнал / шум (SNR) для датчиков изображения CCD и CMOS
Способность камеры машинного зрения фиксировать детали сцены определяется несколькими параметрами с динамическим диапазоном в верхней части списка.Для высококонтрастных изображений требуется широкий динамический диапазон. Одна из проблем заключается в том, что могут быть разные способы расчета динамического диапазона, что затрудняет сравнение камер и датчиков на бумаге. Кроме того, динамический диапазон и отношение сигнал / шум (SNR) иногда считаются взаимозаменяемыми для датчиков изображения CCD и CMOS и камер, что создает дополнительную путаницу.
Динамический диапазон — это соотношение между максимальным уровнем выходного сигнала и минимальным уровнем шума при минимальном усилении сигнала (минимальный уровень шума, который представляет собой среднеквадратичный (среднеквадратичный) уровень шума в черном изображении).Уровень шума камеры содержит шум считывания сенсора, шум обработки камеры и дробовой шум темнового тока. Динамический диапазон представляет собой способность камеры отображать / воспроизводить самые яркие и самые темные части изображения и количество различий между ними. Технически это динамический диапазон внутри сцены. В одном изображении может быть часть полностью черного цвета и часть полностью насыщенная.
Выражается в дБ (децибелах). Максимально возможный сигнал прямо пропорционален полной емкости лунки пикселя, где полная емкость лунки — это максимальное количество электронов на пиксель.Следовательно, динамический диапазон — это отношение полной мощности скважины к минимальному уровню шума.
Это следует пояснить как «полезную полную мощность скважины». Разработчики камер не всегда могут использовать всю емкость датчика изображения, если они хотят сохранить линейность, а также не все пиксели насыщаются на одном и том же уровне. Если используется полная емкость скважины датчика вместо полезного значения полной скважины, это может обеспечить искусственно расширенный динамический диапазон, и о чем следует знать.
Динамический диапазон не равен уровню оцифровки, поэтому камера с 12-битным аналого-цифровым преобразователем не обязательно имеет 12-битный динамический диапазон, поскольку при этом не учитывается шум. Причинность обратная; если камера имеет 12-битный динамический диапазон, аналого-цифровые преобразователи также должны быть не менее 12 бит, а желательно выше.
Динамический диапазон также отличается от отношения сигнал / шум, хотя оба они выражены в дБ. Отношение сигнал / шум — это просто отношение уровня сигнала к уровню шума.Поскольку абсолютный уровень шума зависит от среднего заряда и PRNU (неоднородности фотоотклика) от уровня сигнала, то же самое зависит и от SNR. Следовательно, SNR — это отношение среднего уровня сигнала к среднеквадратичному уровню шума.
В отношении SNR для более высоких уровней сигнала преобладает дробовой шум. Максимальный SNR получается при полномасштабном выходе. Обратите внимание, что это отношение сигнал / шум не может быть измерено на практике, так как шум становится ограниченным вблизи полномасштабного выходного сигнала.
При желании динамический диапазон можно измерить и рассчитать, используя кривую переноса фотонов.Для получения дополнительной информации о кривой переноса фотонов щелкните здесь.
Динамический диапазон обеспечивает гораздо более полезную индикацию (по сравнению с SNR), касающуюся способности камеры предоставлять желаемые детали изображения. При сравнении значений динамического диапазона с разных камер убедитесь, что они были измерены в одинаковых условиях.
Подробнее о сравнении камер:
Обзор динамической обработки сигналов
: Часть 1 — Оцифровка и динамический диапазон
Основы обработки сигналов важны для пользователей испытательного оборудования.Чтобы понять динамический диапазон, полезно начать с основ оцифровки данных. Поскольку аналоговый сигнал оцифровывается аналого-цифровым преобразователем (АЦП) прибора, каждая точка данных преобразуется в цифровые отсчеты с фиксированной частотой дискретизации. Например, прибор, производящий выборку со скоростью 100 000 выборок в секунду (100 ksps), записывает точки цифровых данных 100 000 раз в секунду. При этой частоте дискретизации интервал между точками дискретизации (изменение «t») составляет 1/100 000 = 0,00001 с. Обратите внимание, что при обсуждении частоты дискретизации мы часто используем ksps, а не kHz, чтобы различать полосу пропускания и частоту дискретизации.
Когда эти данные преобразуются через равные интервалы времени (изменение в «t»), аналого-цифровой преобразователь (АЦП) присваивает значение каждой выборке. АЦП определяются количеством битов, которые они генерируют на выборку. Data Physics была в авангарде этой технологии, будучи одним из первых поставщиков, принявших 24-битные АЦП, и все продукты Data Physics DSP используют 24-битные дигитайзеры. Сегодня большинство других поставщиков анализаторов также используют 24-разрядные АЦП, и было бы трудно оправдать, что кто-то решит купить 16-разрядный анализатор.
АЦП с 24-битным разрешением означает, что существует 2 24 целочисленных значений, которые дигитайзер может присвоить отсчету. Другими словами, полный диапазон аналогового входного напряжения можно разделить на 2 24 значений, которые могут быть присвоены каждой выборке. Чтобы дать вам лучшее представление, при диапазоне входного напряжения +/- 1 В имеется доступное значение, которое можно назначать каждые 0,119 В (0,000000119 В)! Это значительная разница между значениями выборки данных. Чтобы полностью оценить разрешение, в следующей таблице сравнивается разрешение для разного количества бит на выборку:
Точность, хотя и тесно связана с разрешением, отличается от разрешения тем, что точность зависит от ряда факторов, включая линейность, искажение, шум и разрешение.Другими словами, идеально линейный АЦП, который не искажает и не имеет внутреннего шума, точен до минимума.
Динамический диапазон — это соотношение между самым высоким сигналом, который можно измерить, и самым низким сигналом, который можно измерить, когда они присутствуют вместе. Чаще всего динамический диапазон указывается в дБ. По мере того, как АЦП становятся более точными, минимальный уровень шума прибора — схема, через которую сигнал поступает на АЦП — становится ограничивающим фактором, поскольку внутренний шум прибора теперь превышает разрешение АЦП.Тогда динамический диапазон, а не количество битов, становится лучшим выражением доступного диапазона измерения для данной системы.
Основным преимуществом высокого динамического диапазона является то, что сигналы очень низкого уровня также могут быть измерены в присутствии сигналов высокого уровня. Фактически, некоторые клиенты приобрели анализаторы SignalCalc просто потому, что теперь они могли видеть сигналы, которые они никогда раньше не могли исследовать. Очень практичным побочным преимуществом для пользователя, особенно в приложениях для испытаний конструкций, является то, что для получения точных измерений больше не требуется постоянная регулировка многих диапазонов входного напряжения.
Важно понимать, что, хотя динамический диапазон является основной спецификацией, не все производители приборов определяют свои инструменты одинаково. Кроме того, некоторые производители более изобретательны, чем другие, при публикации спецификаций, и даже инструменты одного производителя могут отличаться. По этой причине лучший способ проверить динамический диапазон инструмента — просто измерить его. Самый простой тест — просто заземлить терминал и наблюдать падение уровня шума в дБ во всем диапазоне.Чаще всего используется диапазон 1 В. График ниже показывает динамический диапазон Abacus во всей его полосе частот. Другой эффективный тест, который также включает в себя системный ЦАП, состоит в том, чтобы замкнуть выходной сигнал на вход и наблюдать две синусоидальные волны, одну на полном диапазоне, а другую на наименьшем наблюдаемом уровне.
Динамический диапазон
— Документация NI RF Signal Generator
Динамический диапазон — это диапазон между минимальным обнаруживаемым сигналом (в данном случае минимальным уровнем шума) и точкой сжатия -1 дБ, как показано на следующем рисунке.
Динамический диапазон выражается следующим уравнением:
DR (дБ) = P 1 дБ (дБм) — Уровень шума (дБм / Гц)
Еще один термин, часто используемый для описания динамического диапазона, — это динамический диапазон, свободный от паразитных составляющих (SFDR). В традиционном понимании усилителя или передатчика SFDR — это уровень, на котором продукты интермодуляционных искажений (IMD) равны минимальному уровню шума. Следовательно, входные сигналы регулируются таким образом, чтобы разница между полезными сигналами и минимальным уровнем шума была равна разнице между полезными сигналами и паразитными сигналами.На следующем рисунке представлено графическое представление SFDR.
SFDR можно вычислить из точки пересечения третьего порядка (TOI) и точки пересечения второго порядка (SOI) с помощью следующих уравнений:
SFDR TOI = 2/3 ( OIP 3 — Уровень шума )
SFDR SOI = 0,5 ( OIP 2 — Уровень шума )
Используя модуль повышающего преобразователя NI 5610 в качестве автономного устройства, максимально увеличьте SFDR, используя ту же процедуру, что и для максимизации TOI.Эта процедура сводит к минимуму ослабление радиочастот.
При использовании модуля повышающего преобразователя NI 5610 в сочетании с модулем AWG в качестве генератора откалиброванных радиочастотных сигналов SFDR для двухтонального сигнала представляет собой разницу между желаемыми тонами и уровнями интермодуляции. Это значение можно рассчитать из TOI и SOI с помощью следующих уравнений:
IMD TOI = 2 ( OIP 3 — P из )
IMD SOI = OIP 2 — P выход
| Выходная мощность (дБм) | Порог шума (дБм / Гц) | Продукты TOI (дБн) | ||||
|---|---|---|---|---|---|---|
| -20 | -140 | -8614 | -8614 | -6 | -126 | -86 |
| 5 | -115 | -54 |
Анализ динамического диапазона 9 Диапазон
является одним из основных показателей, описывающих возможности контроллера шейкер.Все мы «знаем», что динамический диапазон описывает диапазон от малой до большой амплитуды ускорения, которой можно надлежащим образом управлять во время испытания. Поскольку современные контроллеры — это цифровых прибора , мы также «знаем», что динамический диапазон «в шесть раз превышает количество бит в аналого-цифровом преобразователе». Но что мы на самом деле знаем? Давайте рассмотрим динамический диапазон регулятора вибрации более научно. .Рисунок 1: Контроллер вибрации генерирует управляющий сигнал, который заставляет измеренное управляющее ускорение точно соответствовать предписанному требованию.
Как показано на рисунке 1, контроллер формирует петлю вокруг вибратора и тестируемого устройства (DUT), подавая аналоговый сигнал на усилитель мощности, приводящий в действие звуковую катушку якоря вибратора (или регулирующего клапана). Этот сигнал называется приводом , и контроллер формирует его, сравнивая (аналоговое) ускорение Control , измеренное на столе встряхивающего устройства (или на тестируемом устройстве), с желаемым заданием Demand . Алгоритмы управления стремятся систематически минимизировать разницу между сигналами Control и Demand , регулируя форму и амплитуду сигнала Drive .
Из рисунка 1 видно, что доступный динамический диапазон теста ограничен не только динамическим диапазоном контроллера, но и характеристиками усилителя мощности, вибратора, акселерометра контрольной точки, тестового объекта и всего монтажного используемое оборудование и методы. Также ясно, что роль контроллера заключается в измерении сигнала Control , выполнении вычислений и обработки этого измерения и генерации сигнала Drive .Глубина амплитуды каждого из этих трех процессов влияет на доступный динамический диапазон теста.
Шейкер и его усилитель должны быть достаточно мощными, чтобы приводить в действие ИУ и крепление с требуемыми уровнями силы и движения для испытания. Подвеска вибростенда должна быть достаточно линейной, чтобы точно воспроизводить детали с низкой амплитудой Demand , а минимальный уровень шума усилителя должен быть достаточно низким, чтобы не маскировать эти особенности. Акселерометр и его преобразователь сигнала должны иметь адекватный динамический диапазон, чтобы точно следовать за движением Control , и этот диапазон должен быть должным образом согласован с диапазоном ускорения теста.Когда все эти условия соблюдены, контроллер становится ограничивающим фактором в производительности контура. Следовательно, важно иметь контроллер с максимально возможным динамическим диапазоном.
Вы не можете никогда иметь слишком большой динамический диапазон в любой части испытательного оборудования . Физические реалии теста всегда неблагоприятно «складываются», чтобы использовать каждую унцию доступного динамического диапазона, который может собрать система. Также важно, чтобы вы понимали динамический диапазон вашего оборудования, чтобы вы могли точно предсказать производительность тестовой системы аналитически.Это позволяет избежать использования времени и лабораторных ресурсов на основе «крыла и молитвы», что всегда является дорогостоящей производственной философией.
дБ (SNR): что на самом деле говорит динамический диапазон
Рисунок 2: Типичные характеристики современного акселерометра (любезно предоставлено Dytran Instruments).
Динамический диапазон — это соотношение наибольшего и наименьшего сигналов, которые могут одновременно обрабатываться соответствующим образом прибором или системой. Это соотношение обычно выражается в децибелах (дБ), чтобы сжать диапазон чисел, о котором нам нужно подумать.Самый большой сигнал — это вход или выход Full-Scale , а самый маленький — Noise-Floor или предел разрешения процесса. Таким образом, динамический диапазон на самом деле представляет собой отношение сигнал / шум (SNR), выраженное в дБ. Довольно часто физика требует, чтобы полномасштабные спецификации и характеристики минимального уровня шума были представлены в непоследовательной манере. Обычно полную шкалу называют пиковым значением, а минимальный уровень шума — среднеквадратичным (RMS) значением. Рассмотрим в качестве примера характеристики акселерометра, показанные на рисунке 2.
Этот датчик 100 мВ / г имеет «диапазон измерения» или полную шкалу ± 50 г и «эквивалентный шум» или минимальный уровень шума 0,0001 г RMS. Полная шкала отражает максимальное пиковое ускорение , которое может быть измерено без «отсечения» или ограничения выходного сигнала (напряжения). Напротив, минимальный уровень шума датчика представляет собой непрерывный широкополосный спектр. Следовательно, минимально разрешаемый сигнал выражается как среднеквадратичное значение в указанной полосе пропускания (в данном случае от 1 Гц до 10 кГц). Обратите внимание, что этот минимальный уровень шума, вероятно, изменяет «высоту» с частотой; если бы он был плоским, его можно было бы выразить как постоянную спектральную плотность г / √Гц или г 2 / Гц спектральную плотность мощности .
Динамический диапазон всегда выражается как отношение последовательных чисел. Следовательно, мы предположим, что сигнал полной шкалы ± 50 g является синусоидальным, и будем использовать его среднеквадратичное значение (0,707 * 50 g, , пик, = 35,4 g, , среднекв., ) при вычислении динамического диапазона. Это дает нам отношение полной шкалы к минимальному уровню шума 35,4, деленное на 0,0001 или 353 500; преобразование этого числа в децибелы дает 111 дБ (= 20 * log 10 [353 500]). Обратите внимание, что синусоида всегда используется для такого преобразования пикового значения в среднеквадратичное значение по отраслевым соглашениям.Также обратите внимание, что динамический диапазон 111 дБ предназначен для диапазона частот от 1 Гц до 10 кГц. Если вход датчика ограничен более узкой полосой пропускания, динамический диапазон фактически увеличится на до , отражая интеграцию минимального уровня шума на меньшем частотном интервале. Такая же характеристика наблюдается у контроллеров вибрации.
Тестирование контроллера
Для проверки динамического диапазона устройства необходимо использовать тщательно сконструированный сигнал, пиковое значение которого чуть ниже максимального уровня, который может измерить устройство, а также небольшой сигнал, который находится чуть выше минимального уровня шума.Эти два уровня сигнала могут быть на одной и той же частоте и применяться последовательно, или же могут быть два одновременных сигнала, применяемых на разных частотах. Измерение динамического диапазона — это соотношение между самым большим сигналом, который можно измерить, и самым маленьким сигналом, который можно измерить.
Ни один тест не может полностью охватить и охватить все аспекты динамического диапазона контроллера. Тем не менее, следующая группа тестов в совокупности документирует возможности конкретного инструмента. У каждого теста есть сильные и слабые стороны, которые мы обсудим.Некоторые из этих тестов требуют внешнего оборудования; к таким испытаниям нужно подходить с некоторым трепетом. Слишком легко избавиться от слабости неопытного оператора или внешнего инструмента на исследуемом контроллере. Осциллографы с цифровой памятью обычно имеют разрешение 8 бит, а генераторы функций редко имеют гармоническую чистоту до -100 дБ. Современные контроллеры вибрации столь же точны, как и большинство цифровых анализаторов сигналов, и часто будут наиболее точным генератором функций и анализатором сигналов в вашей лаборатории.
Мы будем использовать тесты, посвященные трем аспектам контроллера: входным каналам, выходным каналам и алгоритмам управления. Эти три аспекта будут взаимозависимыми, особенно тесты алгоритмов управления, которые зависят от сигналов из входных и выходных каналов и, следовательно, не могут быть лучше любого из них. Во многих случаях вход и выход контроллера будут использоваться одновременно.
Мы рассмотрим два различных теста входного канала, в которых тщательно продуманные внешние аналоговые сигналы подаются на вход Control , а контроллер используется для захвата сигнала для цифрового анализа.Затем мы исследуем динамический диапазон выхода Drive , заставив контроллер генерировать полномасштабную синусоиду фиксированной частоты и измерить ее с помощью внешнего анализатора сигналов. Затем мы воспользуемся жестким спектром Demand в тесте «без проводов» или «с обратной связью» для одновременного изучения сигналов Drive и Control . Будут обсуждены два дополнительных теста с «обратной петлей», один с использованием свипирующего синуса, а другой — с узкими полосами случайного шума. Наконец, мы рассмотрим управление активным фильтром с высокой добротностью, действующим как имитация структуры на вибраторе.
Тест двухтонального входа
Рисунок 3: Тестирование динамического диапазона управляющего входа двухтональным методом.
Двухтональный динамический диапазон входного канала Control заимствован из рекомендованной IEEE практики для тестирования анализатора спектра с временной компрессией или БПФ. Как показано на рис. 3 , применяется аналоговый сигнал с двумя синусоидальными составляющими. Один компонент настроен на полноразмерный вход. Второй синус на другой частоте ослабляется до тех пор, пока он просто не «теряется» в базовой линии спектра, вычисляемого из суммы.Отношение этих компонентов определяется настройкой прецизионного аттенюатора, и эта настройка записывается как динамический диапазон, когда более слабый сигнал просто неотличим от спектрального минимума.
Тестовый сигнал, необходимый для этого теста, может генерироваться высокопроизводительным генератором произвольных функций. В качестве альтернативы, для «построения» сигнала могут использоваться два высококачественных генератора или синусоидальных синтезатора, точный аттенюатор и прецизионная схема суммирования. Аналоговые синусоидальные источники должны обеспечивать выходной сигнал, превышающий полную шкалу входного канала контроллера, чтобы можно было использовать пассивную суммирующую схему .Использование активного сумматора вводит внешний минимальный уровень шума в уравнение и вводит возможные артефакты сигнала, включая продукты интермодуляции.
Результаты этого теста сильно зависят от длины блока, используемого для БПФ, и типа используемой оконной функции. Шум квантования основного тона действует как сигнал дизеринга, и это позволяет измерять сигналы с низкой амплитудой, которые невозможно измерить независимо. Например, при длине блока 65 536 отсчетов и оконной функции Хеннинга идеальная 14-битная система в этом тесте покажет 120 дБ.Очевидно, это намного больше, чем отношение сигнал / шум 84 дБ, которое обычно можно ожидать от 14-битного входа. По этой причине этот тест не является хорошей мерой динамического диапазона.
Также обратите внимание, что пиковые частоты из-за гармонических искажений, по всей вероятности, будут выше, чем нижний из двух суммированных сигналов. Если два измеряемых сигнала являются гармониками друг друга, то уровень гармонических искажений будет ограничивающим фактором. Это очевидно на рис. 4 , где гармоники основного тона более заметны, чем тона низкого уровня.Таким образом, хотя минимальный уровень шума позволяет различать некоторые сигналы на расстоянии 135 дБ друг от друга, этот тест может быть более полезным в качестве меры количества присутствующих гармонических искажений. Что не может быть определено с помощью этого теста, так это то, вызваны ли гармонические искажения генератором произвольной функции или входной электроникой контроллера.
Рисунок 4: Двухтональный тест контроллера VR9500 показывает 135 дБ между полной шкалой и малым тоном.
Тест ввода эффективных бит
Это более поздний метод тестирования, одобренный IEEE для цифровых записывающих устройств.Как показано на рисунке 5, на входной канал Control подается одиночная синусоида. Цифровая запись синуса без запуска производится оборудованием ввода контроллера, и эти данные аппроксимируются кривой для получения четырех параметров ( f , A , B и C ) модели вида: y (t) = A Cos (2 π f n Δt) + B Sin (2π f n Δt) + C , где Δt — известный интервал между выборками, а n — это количество выборок.Эта идентификация параметра позволяет отделить «сигнал» от «шума», что позволяет рассчитать ОСШ. Затем результат выражается в «эффективных битах», а не в дБ.
Чтобы понять преобразование дБ (SNR) в «эффективные биты», рассмотрим идеальный преобразователь « n -бит». Идеальный преобразователь « n -бит» демонстрирует 2 n уникальных выходных кодов, равномерно охватывающих его диапазон входного напряжения ± В FS .Каждое изменение «младшего значащего бита» (LSB) в выходном коде отражает изменение входного напряжения на величину, В q , называемую напряжением квантования , где В q = V FS / 2 н-1 . Обратите внимание, что кодовое представление точно правильное только при 2 n определенных напряжениях; во всех остальных случаях погрешность составляет ± V q /2 . Следовательно, преобразователь называется точным до ± ½ LSB.В результате идеальный преобразователь имеет среднеквадратичный минимальный уровень шума В q / √12 . Когда на преобразователь подается синусоидальный сигнал ± В FS пик, отношение сигнал / шум (среднеквадратичное значение) определяется как:
( Уравнение 1)
Рисунок 6: Взаимосвязь между эффективными битами и динамическим диапазоном или SNR.
Этот результат показан на рис. 6 , и теперь мы лучше понимаем давно принятый трюизм «6 дБ на бит»! Эффективные биты сжимают большой диапазон чисел в более понятный диапазон, как и расчет в дБ.Например, ранее рассмотренный акселерометр имеет заявленное отношение сигнал / шум 111 дБ. Используйте это число, чтобы ввести вертикальную ось рисунка 6; считайте эквивалентное «количество бит» (чуть больше 18) по горизонтальной оси. Ясно, что у этого датчика не будет проблем с питанием 16-битного АЦП до полного динамического диапазона. Это было бы явным «узким местом» в 24-битной системе. Основным преимуществом теста эффективных битов является то, что он не требует сравнительных измерений. Частота тестового синуса должна быть в пределах выбранной полосы пропускания контроллера.Его амплитуда должна быть меньше напряжения входа ± F с . Однако нет необходимости измерять или знать ни частоту, ни амплитуду тестового сигнала. Синус должен быть стабильным, по частоте и амплитуде и чистым, по форме волны. По этой причине аналоговый отфильтрованный выход цифрового синтезатора является предпочтительным источником сигнала. Однако контроллер должен обеспечивать доступ к необработанным данным сигнала, а для выполнения теста требуется цифровой алгоритм построения кривой.IEEE особенно предостерегает от использования БПФ в качестве процесса аппроксимации кривой и рекомендует прямое применение «минимизации наименьших квадратов» между моделью и полученными выборками.
Этот тест был проведен на контроллере Vibration Research VR9500 с использованием выхода контроллера в качестве высококачественного синтезатора синусоидальных сигналов и с использованием функции RecorderVIEW для записи необработанных входных сигналов на диск. Затем эти формы сигналов были загружены в MATLAB ® и обработаны с помощью алгоритма подбора кривой.Типичные результаты испытаний для VR9500 показаны на Рис. 7 .
Рисунок 7: Измеренные эффективные биты VR9500 и VR8500 Управляющий входной канал с различной полосой пропускания.
Четыре тестовых полосы частот 20 Гц и менее соответствуют выбранным полосам пропускания синусоидального фильтра. Шесть более высоких полос пропускания показывают типичные результаты широкополосного доступа; К ним относятся полоса пропускания при испытаниях транспортных средств ASTM 200 Гц, полоса пропускания при испытаниях NAVMAT 2000 Гц и максимальная полоса пропускания VR9500.Соответствующие динамические диапазоны для этой полосы пропускания показаны на Рис. 8 .
Рисунок 8: Динамический диапазон контроллеров VR9500 и VR8500 при различной полосе пропускания.
Тест однотонального выхода
Рисунок 10: Этот однотональный тест выхода VR9500 Drive показывает динамический диапазон примерно 110 дБ.
На рисунке 10 показан спектр синусоидального сигнала 1000 Гц ± 2 В, генерируемый выходом контроллера VR9500 и анализируемый с помощью внешнего анализатора БПФ.Фоновый шум ниже уровня сигнала более чем на 126 дБ, при этом пик наивысшей гармоники примерно на 110 дБ ниже уровня сигнала.
Тесты с обратной связью
Недостатком предыдущих тестов является необходимость внешнего оборудования и / или внешнего математического анализа. Тем не менее, контроллеры вибрации имеют возможность как создавать выходные данные, так и анализировать входные данные, и обе эти функции используются одновременно во время работы. Поэтому желательно применить тест, который использует выход и вход контроллера, чтобы оба тестировались одновременно, и никакого дополнительного оборудования не требовалось.Затем результаты теста будут отражать комбинированный динамический диапазон выходов и входов. Также можно провести те же тесты только с выходом, используя внешний анализатор сигналов, или только с входом, используя внешний синтезатор сигналов. Это позволит указывать отдельные результаты как для выхода, так и для входа за счет необходимости дополнительного оборудования.
Тест синусоидальной петли
Рисунок 11: Установка для испытания с линейно-синусоидальной обратной связью.
В этом тесте привод Drive по шлейфу возвращается к входу Control , как показано на Рис. 11 .Выполняется тест с разверткой синусоиды, в котором задается синус фиксированной частоты с экспоненциальным уменьшением амплитуды на протяжении всего теста. Амплитуда начинается с уровня полной шкалы, а затем уменьшается до уровня ниже ожидаемого динамического диапазона контроллера. Drive и Control рассматриваются как графики зависимости среднеквадратичного значения от времени с логарифмической осью амплитуды. Также отображается коэффициент пропускания (отношение среднеквадратичного значения к среднеквадратичному) для Control по отношению к Drive .Обе эти кривые представляют собой чистые прямые линии в динамическом диапазоне контроллера. Амплитуда находится на полной шкале контроллера в левой части дисплея и спускается «в шум» справа. В этой области пропускаемость составляет точно 1,0 (для 1000 мВ / г ). На (правом) крае динамического диапазона, где огибающая Transmissibility простирается от .707 до 1.41 , значения сигнала и шума имеют одинаковую амплитуду.Среднеквадратичное значение напряжения Drive в этот момент теста равно среднеквадратичному уровню шума прибора в полосе частот, пропускаемой следящим фильтром. Следовательно, амплитуда управляющего напряжения в этой точке является мерой минимального уровня шума. Динамический диапазон выхода и входа — это отношение максимального напряжения (напряжения полной шкалы) к этому измеренному минимальному уровню шума.
Здесь важно отметить, что минимальный уровень шума RMS в этом тесте — это количество шума, измеренное после следящего фильтра.Чем уже следящий фильтр, тем меньше шума он пропускает. Поэтому полоса пропускания фильтра отслеживания синусоиды является важным параметром в этом тесте, и при использовании результатов этого теста для сравнения контроллеров важно использовать одну и ту же полосу пропускания для каждого контроллера. Рисунок 12 показывает, что контроллер VR9500 с полосой следящего фильтра 10 Гц показывает динамический диапазон более 130 дБ.
Рисунок 12: Тест с линейным изменением синусоиды контроллера VR9500 показывает динамический диапазон входа / выхода около 130 дБ.
Тест случайной петли
Рисунок 13: Установка для проверки узкополосной случайной обратной петли.
Контроллер можно протестировать аналогичным образом, используя случайный тест, используя последовательность ступенчатых уровней нагрузки в диапазоне от ниже минимального уровня шума до полномасштабной спектральной плотности, как показано на рисунке 13. Для определения нижнего предела Coherence между Drive и Control вычисляется. Нижний предел — это уровень до точки, когда когерентность падает ниже 0.5. Тогда измерение динамического диапазона — это отношение полной шкалы плотности к этому нижнему пределу. Полномасштабная плотность для этого теста определяется уровнем, при котором среднеквадратичное значение самой высокой полосы почти приводит к тому, что пики сигнала достигают полномасштабного напряжения. Это произойдет, когда √ (Density max * Bandwidth) = V FS /6, где V FS — это полномасштабный уровень напряжения, а Bandwidth — это частотная ширина используемых шагов. Следствием этого является то, что полномасштабная спектральная плотность будет зависеть от полосы пропускания, используемой в этом тесте, и в результате результирующее измерение динамического диапазона будет зависеть от полосы пропускания, используемой в тесте.
Чем уже полоса пропускания, используемая в тесте, тем выше максимальный уровень плотности, который может быть достигнут, и, следовательно, тем шире значение динамического диапазона, о котором будет сообщено. Из-за этого при сравнении контроллеров с помощью этого теста необходимо соблюдать осторожность, чтобы использовать одни и те же параметры на обоих контроллерах.
Рисунок 14: Случайный тест показывает 105 дБ чистого динамического диапазона для VR9500.
На рисунке 14 показан случайный тест с обратной связью, выполняемый на контроллере VR9500. Как показано, 24 Требуемых шагов PSD, каждый шириной 50 Гц, охват 115 дБ.Контроль кажется жестким от 3,16 x 10 -2 В 2 / Гц до 1 x 10 -13 В 2 / Гц, диапазон 115 дБ.
Однако прилагаемые графики когерентности и проницаемости показывают, что минимальный уровень шума ближе к 3,16 x 10 -13 В 2 / Гц для консервативного случайного динамического диапазона 105 дБ. Обратите внимание, что Coherence больше 0,9 вплоть до –105 дБ. Это по-прежнему около ,8 при –110 дБ, где коэффициент передачи отклоняется от 1.0.
Обратите внимание, что этот тест выполняется с PSD Demand , амплитуда которого увеличивается с увеличением частоты. Это гарантирует, что самые низкие ступени амплитуды в сигнале Control отражают уровень шума прибора , а не гармонические искажения . То есть ни одна ступень этого сигнала не вносит существенные гармоники в другие ступени.
Тестирование ввода / вывода с использованием жестких требований
Рисунок 15: Тестирование динамического диапазона привода и управления с использованием жесткой нагрузки.
Интересная альтернатива предыдущим тестам была разработана правительством Китая примерно в 1988 году. Этот тест (см. Рисунок 15) заслуживает внимания тем, что для него требуется внешнее оборудование no ; он одновременно обрабатывает вход Control и выход Drive . Он требует, чтобы тестировщик ничего не понимал, кроме работы контроллера, и не требует подгонки кривой или сложных математических вычислений. Одним словом, он абсолютно элегантен в своей простоте.
Ключом к этой эффективной оценке является диапазон частот между 350 и 500 Гц , как показано на рисунке 15. Спектр Demand в этой области последовательно программируется на снижение уровней спектральной плотности мощности g 2 / Гц пока контроллер не сможет провести тест. Самый низкий уровень «метки», на котором может быть достигнуто управление, определяет динамический диапазон системы управления .
Рис. 16. VR9500 выполняет испытательный тест JJG 529-88 в Китае при 60–110 дБ.
Как показано на рисунке 16, VR9500 успешно управлял вырезом до глубины –100 дБ по отношению к самому высокому уровню PSD. Это не могло соответствовать требованию –110 дБ самого низкого значения. На рисунке 17 более подробно показан тест 100 дБ, включая пределы и сигнал Drive .
Рисунок 17: Подробная информация о работе JJG 529-88 при 100 дБ для VR9500, показывающая управление с ограничениями и управляющий сигнал.
Обратите внимание, что тестовый профиль JJG 529-88 указан в единицах g 2 / Гц.Также помните, что для проверки динамического диапазона используемые сигналы должны быть тщательно продуманы так, чтобы пиковые уровни были чуть ниже максимального значения, которое система способна измерить. Поэтому оператор должен выбрать чувствительность в мВ / g (несуществующего) акселерометра таким образом, чтобы пиковые уровни сигнала 10 g RMS были чуть ниже максимального входного напряжения системы для тестируемого входного диапазона. Это позволяет проводить этот тест независимо от используемого входного диапазона. Для системы с ± 10 Вольт Control и Drive в полном масштабе этот оптимум составляет около 100 мВ / г, что приводит к уровням напряжения 1 В RMS и 6 В PEAK На этом этапе достижимый глубина надреза будет измерять диапазон между полномасштабным сигналом и минимальным уровнем шума.Если чувствительность увеличивается выше 200 мВ / G, пики формы волны начинают насыщаться. Это будет очевидно как внезапное увеличение измеренного уровня G 2 / Гц в области 350–500 Гц и серьезно повлияет на результаты испытаний.
Теперь, если мы вычленим масштабный коэффициент чувствительности и рассмотрим взаимосвязь между максимальным уровнем V 2 / Гц и полномасштабным входным напряжением, а также взаимосвязь между минимальным уровнем V 2 / Гц и минимальным уровнем шума, мы можем получить больше информации об этом тесте.Для данного спектра максимальный уровень PSD составляет 10 -3 , умноженный на квадрат среднеквадратичного напряжения, В RMS . Если принять коэффициент амплитуды 5, максимально достижимый уровень V RMS будет V FS /5. Минимально достижимый уровень V 2 / Гц, предполагая плоский спектр шума, будет (V noise 2 ) / (2000 Гц), где V noise — минимальный уровень шума RMS. Ожидаемый случайный динамический диапазон (RDR) теста JJG 529-88 тогда будет отношением в дБ этих двух спектральных плотностей мощности.
(Уравнение 2)
Этот результат может быть переработан с точки зрения отношения сигнал / шум, измеренного в тесте эффективных бит . V Шум можно распознать как включающий шум квантования «идеального» преобразователя и шум поддерживающего преобразования сигнала. Следовательно, RDR можно пересчитать с точки зрения SNR следующим образом.
(Уравнение 3)
Это очень интересный результат, потому что он говорит нам, что наилучшие результаты, которые можно ожидать от этого теста, будут на 8 дБ меньше, чем дБ (SNR), измеренный с использованием синусоидального тона.Этого следовало ожидать, потому что пики в случайном сигнале выше, чем для синусоидального сигнала, поэтому случайное среднеквадратичное значение полной шкалы будет ниже, чем синусоидальное среднеквадратичное значение полной шкалы.
Чтобы применить эти результаты на практике, мы обращаемся к рисунку 8 и отмечаем, что для VR9500 с полосой пропускания 2000 Гц отношение сигнал / шум составляет 122 дБ, поэтому мы могли разумно ожидать результата 114 дБ от теста JJ 529-88. Но мы нашли результат только 100 дБ. Чем объясняется эта разница? Ответ лежит в диапазоне высоких частот от 80 до 300 Гц.Паз от 350 до 500 Гц соответствует гармоникам диапазона от 80 до 300 Гц. Любые гармонические искажения в диапазоне от 80 до 300 Гц будут проявляться как повышенный уровень шума в полосе от 350 до 500 Гц. Таким образом, этот тест измеряет динамический диапазон с точностью до точки (обычно до 16 эффективных бит), но за пределами этой точки результаты ограничены гармоническим искажением . Поскольку большинство современных контроллеров имеют разрешение более 16 бит, их результаты при использовании этого теста будут ограничены гармоническими искажениями системы, а не динамическим диапазоном.
Случайный алгоритм и выходной тест с использованием высокодобротного фильтра для имитации вибратора и конструкции
Есть одна обоснованная критика, которая может быть направлена на тест JJ 529-88: он не демонстрирует контроль каких-либо резких резонансных пиков и выемок, которые могут существовать в конструкции. Наш следующий тест решает эту проблему. По крайней мере, два производителя контроллеров создали активные «фильтры вызовов» и предоставили их своему торговому персоналу для демонстрации в полевых условиях. Эти два дизайна удивительно похожи; оба производителя выбрали одинаковые пиковые и режекторные частоты и амплитуды.VR9500 был недавно протестирован против более нового из этих двух фильтров проверки.
Рисунок 18: Тестирование динамического диапазона путем замыкания цикла вокруг фильтра моделирования.
В этом тесте фильтр управляется сигналом Drive , и его выходной сигнал подается на канал Control , как показано на рисунке 18. Тест Demand представляет собой плоский спектр, охватывающий от 20 Гц до 2000 Гц. Таким образом, при полном управлении вся значимая динамика сигнала будет отражена сигналом Drive .Следствием этого является то, что тест проверяет алгоритм управления и выходной сигнал, но поскольку эталонный спектр плоский, входной динамический диапазон по существу не облагается налогом в этом тесте.
Тестирование этих фильтров является сложной задачей до тех пор, пока не будут поняты несколько вещей. Во-первых, в фильтре используется активная электроника с ограниченным диапазоном напряжений. При перегрузке фильтр становится совершенно нелинейным. Ни одна из этих схем не предусматривает какой-либо формы индикации перегрузки, поэтому экспериментатору необходимо определить максимальное значение «белого» возбуждения, которое может быть применено, не вызывая грубого сбоя фильтра.
Во-вторых, усиление фильтра по постоянному току 10 (20 дБ) немного обманчиво. Можно предположить, что выходное значение RMS фильтра больше входного RMS, , когда входная частота ниже частоты первого пика . Однако, когда к фильтру применяется белый вход , выходное среднеквадратичное значение примерно на 36 дБ на больше, чем на , чем входное среднеквадратичное значение. Затем, когда вход имеет правильную «форму» для получения выходного сигнала белого фильтра , выходное среднеквадратичное значение примерно на 23 дБ на меньше , чем входное среднеквадратичное значение.
Все это означает, что тест должен быть проведен с правильно выбранным среднеквадратичным уровнем спроса. Усиление по постоянному току 20 дБ может привести к мысли, что эталонный спектр следует выбирать так, чтобы получить 1 В RMS . Но как только управляющий сигнал будет правильно сформирован, чтобы выходной сигнал фильтра был белым , входной сигнал фильтра будет на 23 дБ выше, чем 1 В RMS или 14,6 В RMS . Ясно, что это перегрузит вход фильтра! Правильный выбор уровня спроса определяется путем определения входного уровня, который перегружает фильтр, а затем установки эталонного спектра на 23 дБ ниже этого уровня.Обычно такой фильтр будет правильно работать до входного сигнала RMS 1 В, поэтому установка эталонного спектра на 68 мВ RMS даст наилучшие результаты.
Рисунок 19: Замыкание цикла вокруг фильтра проблем с VR 8500 с разрешением 800 строк.
Рисунок 19 иллюстрирует успешную блокировку управления на фильтре запроса с использованием VR8500 с 800 линиями управления, при этом все линии Control находятся в пределах ± 3 дБ от линии Demand . Исходя из этого рисунка, можно предположить, что контроллер прошел это испытание.Тем не менее, фильтр вызова имеет вырез на 380 Гц с полосой пропускания всего 0,35 Гц. Полоса пропускания управления 2000 Гц, разделенная на 800 линий управления, дает разрешение линии контроллера 2,5 Гц. Зная это, мы понимаем, что ни один из контроллеров не может правильно управлять этим фильтром только с 800 строками! Добавление внешнего анализатора для мониторинга сигналов управления и управления, вероятно, целесообразно для независимой проверки любого теста обратной связи. Однако в этом конкретном случае мы видим, что полная зависимость от инструмента для анализа его собственной ценности — серьезная ошибка.Вместо автономного анализатора вы можете заменить использование цифрового записывающего устройства (или записывающего программного обеспечения с использованием аппаратного обеспечения контроллера) и автономного анализа с использованием такого программного обеспечения, как MATLAB ® .
Рисунок 20. Спектр контрольного сигнала, состоящий из 800 строк, анализируется внешним анализатором с большим разрешением.
На рисунке 20 показан сигнал Control , проанализированный независимо с использованием БПФ высокого разрешения с линейным разрешением 0,08 Гц. При независимом анализе мы видим, что сигнал Control на самом деле имеет погрешность более 20 дБ вокруг надреза, что намного превышает 3 дБ, которые показывает дисплей контроллера! Из этого мы можем видеть, что любой тест с фильтром вызова должен быть проверен с помощью независимого анализатора .Просто полагаясь на дисплей контроллера, недостатки контроллера могут скрыть истинные ошибки, присутствующие в сигнале.
Рисунок 21: Замыкание цикла вокруг фильтра запроса с разрешением 13 000 строк.
Для правильного управления этим тестом нам необходимо линейное разрешение 0,35 Гц или лучше. Этого можно достичь, увеличив разрешение по количеству строк, используемое контроллером. Рисунок 21 иллюстрирует успешную блокировку управления на фильтре запроса с использованием VR 8500 с 13 000 строк управления, при этом все линии Control находятся в пределах ± 3 дБ от линии Demand .На рисунке 22 показан независимый анализ этого теста, демонстрирующий надлежащее управление этим фильтром с использованием 13 000 строк с максимальной ошибкой менее 2 дБ.
Рисунок 22: Спектр контрольного сигнала, состоящий из 13 000 строк, анализируется внешним анализатором.
Рисунок 23: Максимальная погрешность контура в зависимости от произвольного разрешения управления показывает, что требуется не менее 8000 строк разрешения, чтобы удерживать фильтр вызова в управлении в пределах ± 3 дБ в диапазоне NAVMAT.
На рисунке 23 представлена сводная информация о наихудшем случае ошибки контура как функции разрешения управления.Во всех случаях наихудшая ошибка произошла на режекторном фильтре 380 Гц. Это исследование показало, что для управления этим фильтром вызовов в пределах ± 3 дБ в полосе 20–2000 Гц NAVMAT требуется не менее 8000 строк разрешения контроллера.
Рис. 24. Передаточная функция на 13 000 строк фильтра запроса показывает более 120 дБ динамического диапазона на VR9500; соответствующая функция когерентности указывает на чистое измерение.
На рисунке 24 представлены функции передачи и когерентности фильтра из теста на рисунке 21.Динамический диапазон теста считывается из крайних значений амплитуды передаточной функции. Высокие значения когерентности на каждом пике и впадине передаточной функции указывают на «чистое» управление и линейное поведение фильтра. Сторонники этого теста заявляют, что динамический диапазон контроллера можно определить, взяв отношение максимальной выходной мощности привода к минимальной выходной мощности привода. В приведенном выше тесте мы видим, что VR9500 демонстрирует в этом тесте более 120 дБ, что соответствует динамическому диапазону фильтра вызова.Однако этот тест на самом деле не тестирует динамический диапазон.
Фактически, 16-битный контроллер с 13000 строк также может успешно продемонстрировать более 100 дБ «динамического диапазона» с помощью этого теста, даже если истинный динамический диапазон идеального 16-битного преобразователя составляет всего 96 дБ. Чтобы понять, как это может быть, примите во внимание, что при запуске теста фильтра запроса выходной сигнал контроллера должен быть обратным передаточной функции фильтра, чтобы получить выходной сигнал с плоским спектром от фильтра.Паз в передаточной функции фильтра будет соответствовать очень узкому пику требуемой выходной мощности привода. Максимальное значение этого пика измеряется в V 2 / Гц, где доля Гц определяется шириной полосы пика. Отсюда следует, что максимальное значение V 2 / Гц может быть увеличено до без увеличения уровня сигнала , просто за счет уменьшения полосы пропускания.
В рассматриваемом здесь примере самый высокий пик имеет полосу пропускания 2,5 Гц. Если мы предположим, что сигнал 1 В RMS с половиной общего сигнала сосредоточен в этом пике, то мы ожидаем, что уровень V 2 / Гц будет (0.5 В) 2 /( 2,5 Гц) = 0,1 В 2 / Гц. Действительно, при масштабировании до уровня 1 В RMS мы обнаруживаем, что спектр возбуждения имеет пик 1 x 10 -1 В 2 / Гц. На нижнем уровне 16-битный преобразователь с диапазоном ± 10 В имеет минимальный уровень шума квантования 8,8 x 10 -5 В RMS или 3,1 x 10 -12 В 2 / Гц. Принимая соотношение этих двух чисел, мы видим, что в этом тесте на 16-битной системе может быть показан диапазон 105 дБ, который, как мы уже знаем, не может превышать 96 дБ истинного динамического диапазона! По этой причине тест фильтра запроса, хотя и полезен для проверки контура управления и разрешения линии, не должен использоваться в качестве меры динамического диапазона.
Алгоритм синусоидального сигнала и проверка выходного сигнала с использованием высокодобротного фильтра для имитации вибратора и структуры
Фильтр запроса может также использоваться в схеме, показанной на рисунке 18, для измерения динамического диапазона с помощью теста с разверткой синусоиды. Для этого теста устанавливается плоская амплитуда Требование , а частота синусоиды проходит через пики и выемки фильтра запроса. Следствием этого является проверка только динамического диапазона контура управления и выходного сигнала контроллера. Поскольку вход контроллера предназначен для поддержания одного уровня амплитуды в течение всего теста, динамический диапазон входа контроллера остается непроверенным.Этот тест измеряет относительные значения наибольшего достижимого выхода, который требуется на самом низком уровне в передаточной функции фильтра, к наименьшему достижимому выходу (то есть чуть выше минимального уровня шума) на частоте самого высокого пика в передаточной функции фильтра. .
Напомним, что для измерения динамического диапазона тестовые сигналы должны быть тщательно продуманы так, чтобы максимальный выходной сигнал соответствовал максимальному диапазону системы. Чтобы успешно провести этот тест, необходимо заранее знать потери на самом низком уровне.В данном примере передаточная функция фильтра имеет потери 50 дБ на самой низкой отметке, поэтому уровень требования должен быть как минимум на 50 дБ ниже максимально достижимого выходного напряжения. Для контроллера с максимальным напряжением 10 В мы выбираем уровень потребления 0,01 В PEAK или на 60 дБ ниже максимального.
Рисунок 25. Управляющие и управляющие сигналы VR9500 во время теста с разверткой синусоиды; динамический диапазон превышает 135 дБ. Профиль теста имеет изменение амплитуды запроса (от 0,02 В до 2 В), потому что динамический диапазон VR9500 превышает динамический диапазон фильтра запроса.
На рисунке 25 показан тест с разверткой синусоиды с использованием постоянной амплитуды 0,01 В PEAK Demand . Обратите внимание на отчетливо заметные колебания сигнала Drive на 135 дБ.
Выводы
Было продемонстрировано и обсуждено восемь тестов различных аспектов динамического диапазона контроллера. Тесты двухтонального входа и однотонального выхода, хотя и полезны для измерения гармонических искажений, показали, что они плохо измеряют динамический диапазон. Их результаты больше зависят от длины БПФ, используемого для анализа, чем от фактического динамического диапазона устройства.Также был представлен тест на эффективные долота. Этот тест, хотя и трудновыполнимый, действительно дает хорошее представление о соотношении сигнал / шум в системе.
Также обсуждалось использование фильтра запроса случайного управления с обратной связью, который имитирует слабозатухающую систему. Было показано, что этот тест подвержен ошибочной оценке, если результаты не проверяются независимо от дисплея контроллера. Он также обеспечивает неточные и завышенные измерения динамического диапазона системы.Этот тест полезен для реалистичной проверки контура управления и является хорошим тестом линейного разрешения контроллера. Однако значения динамического диапазона, полученные в результате этого теста, могут быть более чем на 10 дБ больше, чем истинный динамический диапазон системы, поэтому этот тест не следует использовать в качестве меры динамического диапазона.
Обсуждались три теста обратной связи, которые тестируют входы и выходы контроллера одновременно, без использования какого-либо внешнего оборудования. Эти три теста просты в выполнении и вместе дают хорошее представление об истинных возможностях контроллера.
По сути, пределы контроллера определяются максимальным уровнем сигнала, минимальным уровнем шума и характеристиками гармонических искажений системы. Различные меры динамического диапазона будут зависеть от этих характеристик, но, как было показано в этой статье, измерения динамического диапазона могут широко варьироваться в зависимости от того, как он измеряется, и от того, кто выполняет измерения.