Физический размер матрицы | panoramist.ru
Отправлено admin 9 Февраль, 2012 — 10:38
Физический размер матрицы
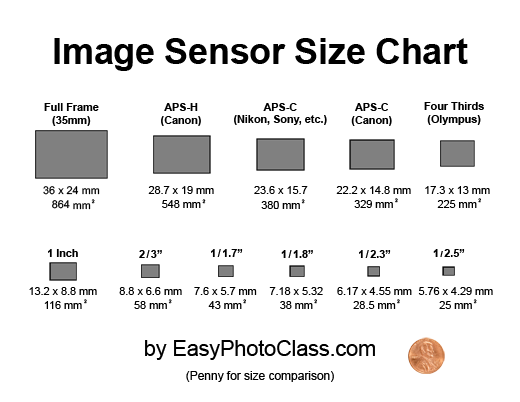
Одной из ключевых характеристик матрицы является её физический размер (не путайте с разрешением). Физический размер — это размер самой поверхности микросхемы, на которой расположены фотоэлементы в миллиметрах. Если физический размер матрицы мал, то даже высокое разрешение в мегапикселях не гарантирует получение качественных снимков. Виной этому так называемые цифровые шумы, о которых будет рассказано в отдельной статье. Таким образом, чем больше физические размеры матрицы, тем лучше и качественней будут снимки. Идельным считается размер матрицы, соответствующий размеру полного плёночного кадра 35×24мм. Однако, чем больше матрица, тем она сложнее в изготовлении и дороже. Поэтому матрицы, имеющие размер полного каждра ставятся только в очень дорогие зеркальные камеры. Даже матрицы размером в половину плёночного кадра, ещё слишком дороги, чтобы ставить их в недорогие фотокамеры, поэтому в мыльницах как правило физический размер матрицы не превышает нескольких миллиметров.
Даже матрицы размером в половину плёночного кадра, ещё слишком дороги, чтобы ставить их в недорогие фотокамеры, поэтому в мыльницах как правило физический размер матрицы не превышает нескольких миллиметров.
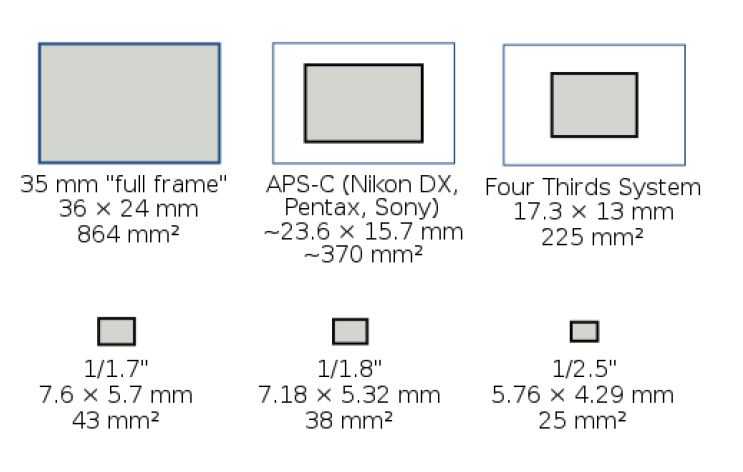
Вроде бы очевидный факт про физический размер матрицы становится очень даже неочевидным, когда мы читаем характеристики цифрового фотоаппарата в паспорте. Мы видим напротив слов «размер матрицы» какие-то странные цифры: 1/2.3″, 1/2.5″, 1/1.8″, 2/3″ и т.д. и начинаем недоумевать — что это? Это странное обозначение является размером матрицы в обратном количестве дюймов. Чем такое соотношение больше, тем крупнее матрица. Однако, каким именно образом этот размер отражает физический размер матрицы в миллиметрах, понять совершенно невозможно. Имеются лишь сведения, что данное обозначение пошло от размеров электронно-лучевых трубок телевизоров и дисплеев, когда с его помощью показывали эффективную площадь поверхности этих самых трубок, которая использовалась при формировании изображения.
Как можно заметить на рисунке, кроме размера в миллиметрах и обратных дюймах, на рисунке есть загадочное обозначение KF. Это так называемый кроп-фактор, который показывает во сколько раз физический размер матрицы фотоаппарата меньше размера плёночного кадра 35×24мм. Таким образом, это ещё один параметр, ориентируясь на который можно судить о физическом размере матрицы. Чем больше кроп-фактор, тем меньше матрица и тем она хуже. Идеальный кроп-фактор, соответствующий полному кадру, размером в 35×24мм — это 1. Кроп-фактор соответствующий размеру полвины кадра равен 1.92 и т.д.
Но даже кроп-фактор, не даёт точного представления о том каков всё-таки точный физический размер матрицы в миллиметрах, давая лишь приблизительное представление.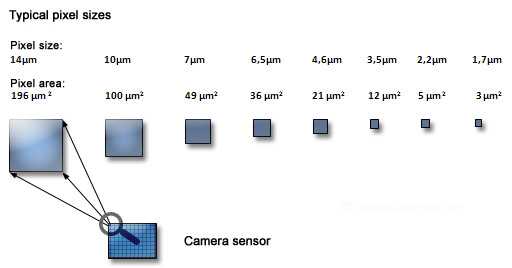
‹ Разрешение матрицы наверх Тип матрицы ›
Чем отличается 4к видео снятое на разные размеры матрицы? — Хабр Q&A
Цена. Чем мельче матрица — тем дешевле она обходится в производстве. Причем цена падает даже быстрее, чем разница в площади матриц.
Глубина резкости (чем больше матрица, тем более ярко выражен эффект нерезкости и тем тщательнее нужно наводить на резкость.
Кстати, весомая причина у конструкторов GoPro выбрать мелкую матрицу — именно эта (кроме цены). Так как при экстремальных занятиях спорта просто некогда наводить на резкость. В том числе автоматика не успевает делать наводку на резкость быстро и точно.
С другой стороны — большие матрицы с их узкой глубиной резко изображаемого пространства позволяют легко выделить главную мысль. Изображение с них выглядит более «киношным».
Шум. Чем мельче матрица — тем менее точно выглядит картинка по пиксельно. Чем ниже освещенность — тем эффект сильнее.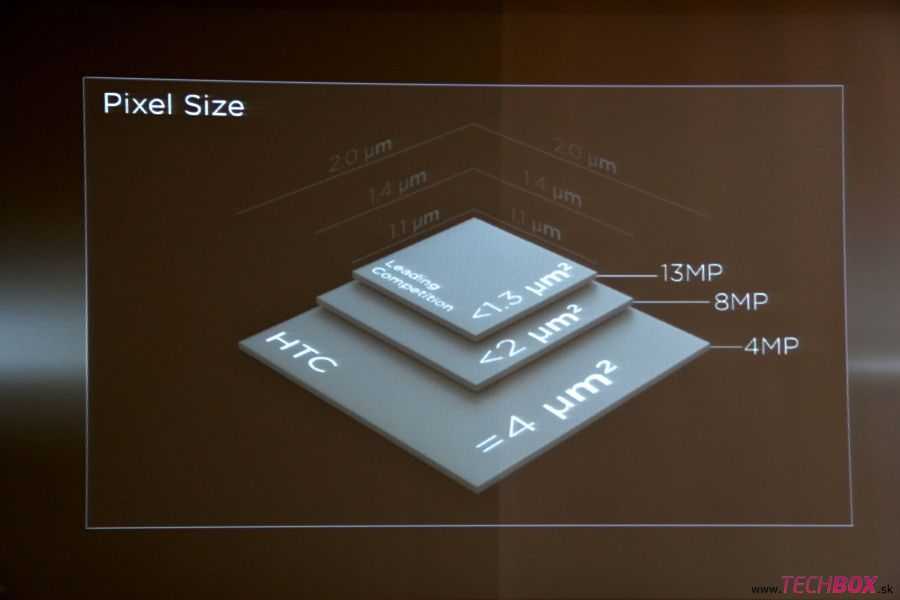 Поэтому на GoPro можно хорошо снимать при хорошем освещении. Но ближе к сумеркам преимущества больших матриц становятся понятными.
Поэтому на GoPro можно хорошо снимать при хорошем освещении. Но ближе к сумеркам преимущества больших матриц становятся понятными.
Детализация изображения. Перекликается с предыдущим абзацем про шум. Но дополнительно к ограничениям мелких матрица добавляются и ограничения разрешающей способности мелких объективов
Ответ написан
Комментировать
Матрица отвечает за чувствительность к свету и количество искажений.
Ответ написан
Комментировать
Там очень много зависимостей. Некоторые важные из них:
Некоторые важные из них:
1) Физический размер 1го пикселя. Применительно к видеокамерам. Менее применительно к фотикам. Иначе говоря, чем больше физический размер пикселя, тем больше у него характеристик. — меньше шумности, больший отклик, больше информации может нести.
2) Чем больше физический размер матрицы, тем качественней объектив можно поставить.
Да, в целом, в стандартных условиях вы не ощутите разницу. Даже более того — вы иногда не сможете заметить разницу между камерой телефона и зеркалкой в самых идеальных условиях. Вы так же не заметите разницу в идеальных условиях между хассельбладом и дешевым кэноном — https://tityaev.livejournal.com/6856.html
Но при этом не всегда большой размер матрицы (физический) — это плюс камеры. Иногда бывает наоборот. Репортажные камеры чаще имеют меньший размер матрицы, чем студийные камеры.
Если брать видео, то снимая на ФФ (36мм) — вам сложнее будет настроиться на фокус при репортаже. А стандартный кинокадр — это super35 , что соответствует APS-С матрице.
Новые фишки типа автофокуса в фотоаппаратах при видео — работают как раз на кропнутых камерах.
Ответ написан
Комментировать
линейная алгебра — Физический смысл нулевого пространства матрицы
$\begingroup$
Что такое интуитивное значение нулевого пространства матрицы? Почему это полезно?
Я не ищу определений из учебников. Мой учебник дает мне определение, но я просто не «понимаю» его.
Например: я думаю о ранге $r$ матрицы как о минимальном количестве измерений, которое может иметь линейная комбинация ее столбцов; он говорит мне, что если я объединим векторы в его столбцах в некотором порядке, я получу набор координат для $r$-мерного пространства, где $r$ минимально (пожалуйста, поправьте меня, если я ошибаюсь) . Значит, я могу рассказать ранг (а также размер) к реальным системам координат, и поэтому для меня это имеет смысл. Но я не могу придумать никакого физического смысла для нулевого пространства… может ли кто-нибудь объяснить, каково его значение, например, в системе координат?
Значит, я могу рассказать ранг (а также размер) к реальным системам координат, и поэтому для меня это имеет смысл. Но я не могу придумать никакого физического смысла для нулевого пространства… может ли кто-нибудь объяснить, каково его значение, например, в системе координат?
Спасибо!
- линейная алгебра
- матрицы
- векторные пространства
$\endgroup$
2
$\begingroup$
Если ваша матрица $A$, то нуль-пространство просто обозначается как набор всех векторов $v$ таких, что $A \cdot v = 0$. Хорошо думать о матрице как о линейном преобразовании; если вы допускаете, что $h(v) = A \cdot v$, то нулевое пространство снова является набором всех векторов, отправленных в нулевой вектор $h$. Думайте об этом как о наборе векторов, которые теряют свою идентичность , когда к ним применяется $h$.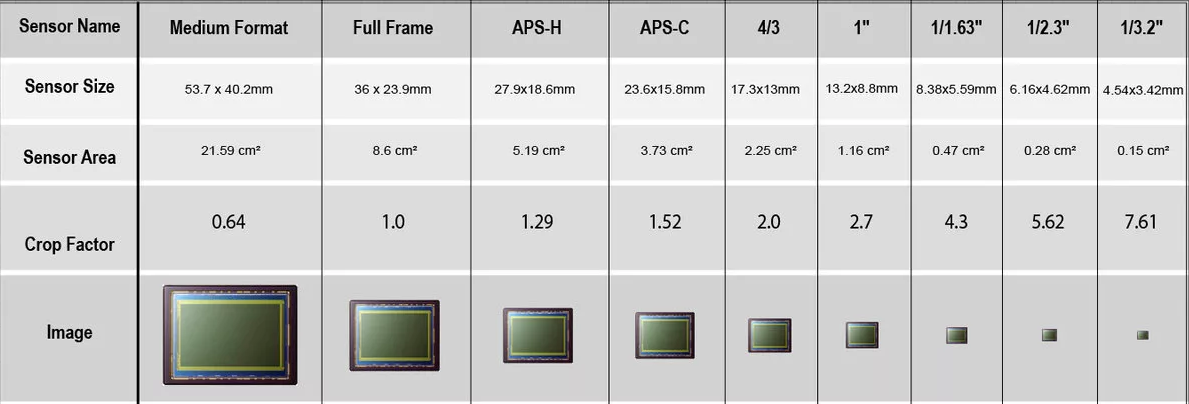
Заметим, что нулевое пространство эквивалентно множеству решений однородного уравнения $A \cdot v = 0$.
Недействительность — это дополнение к рангу матрицы. Они оба действительно важны; вот аналогичный вопрос о ранге матрицы, вы можете найти несколько хороших ответов, почему там.
$\endgroup$
6
$\begingroup$
Это ответ, который я получил на свой собственный вопрос, это довольно круто!
Предположим, что матрица A представляет собой физическую систему. В качестве примера предположим, что наша система — это ракета, а А — это матрица, представляющая направления, в которых мы можем двигаться, основываясь на наших двигателях. Так что же представляют пустое пространство и пространство столбцов?
Предположим, у нас есть интересующее нас направление. Находится ли оно в пространстве нашей колонки? Если да, то мы можем двигаться в этом направлении.
Пространство столбца — это набор направлений, которых мы можем достичь на основе наших двигателей. Предположим, что у нас есть три двигателя, равномерно расположенных вокруг нашей ракеты. Если они все в полном порядке, то мы можем двигаться в любом направлении. В этом случае пространство нашего столбца — это весь диапазон. Но что происходит, когда двигатель ломается? Теперь у нас есть только два двигателя. Наша линейная система изменится (матрица A будет другой), а пространство в столбцах уменьшится.Что такое нулевое пространство? Пустое пространство — это набор инструкций двигателя, которые полностью расходуют топливо. Это набор инструкций, в которые будут двигаться наши двигатели, но направление не будет изменено вообще.
Другой пример: возможно, A может представлять норму прибыли на инвестиции. Диапазон – это все достижимые нормы прибыли. Пустое пространство — это все возможные инвестиции, которые вообще не изменят норму прибыли.
Другой пример: освещение помещения.
Диапазон A представляет площадь комнаты, которая может быть освещена. Пустое пространство A представляет собой мощность, которую мы можем применить к лампам, которые вообще не изменяют освещение в комнате.

— NicNic8
$\endgroup$
$\begingroup$
Представьте себе набор карт-направлений у входа в лес. Вы можете применять направления к различным комбинациям маршрутов. Некоторые комбинации маршрутов приведут вас обратно ко входу. Они являются нулевым пространством направлений карты.
$\endgroup$
1
$\begingroup$
9{m \times n}$, как вы сказали, является размерностью пространства столбцов ($r$ также является размерностью пространства строк), т.е. размерностью пространства, натянутого векторами, которые получаются линейной комбинацией столбцов $A$, что эквивалентно диапазону $A$. (Употребление слова «минимум» в вопросе необязательно). Однако каждый вектор-столбец имеет компоненты $m$, а векторы в диапазоне $A$ имеют компоненты $m$ как таковые, но охватывают только подпространство размерности $r (\leq m)$ вместо пространства размерности $m$. Таким образом, мы упускаем из виду оставшееся $m-r$-мерное подпространство $m$-мерного пространства. 9{n}$ и $Z_R \perp R$
(Употребление слова «минимум» в вопросе необязательно). Однако каждый вектор-столбец имеет компоненты $m$, а векторы в диапазоне $A$ имеют компоненты $m$ как таковые, но охватывают только подпространство размерности $r (\leq m)$ вместо пространства размерности $m$. Таким образом, мы упускаем из виду оставшееся $m-r$-мерное подпространство $m$-мерного пространства. 9{n}$ и $Z_R \perp R$
$\endgroup$
1
$\begingroup$
Я считаю, что самый простой способ визуализировать нулевое пространство — рассмотреть матричное отображение, представляющее отображение вектора в его тень на $y=0$ от фиксированного источника света, который находится далеко.
Пустое пространство этого отображения — это вектор, указывающий прямо на источник света, потому что вектор, представляющий его тень в $y=0$, будет равен $0$. Как правило, из этого примера видно, что для некоторых отображений будут существовать векторы, которые всегда будут отображаться в $0$.
Мы также можем видеть, как другие векторы претерпевают необратимое отображение. То есть из тени лучшее, что вы могли бы восстановить исходный вектор, было бы с точностью до неоднозначности в направлении нулевого пространства.
(Это хорошо еще и тем, что можно делать это на столе ручкой)
$\endgroup$
2
$\begingroup$
Подумайте о наблюдателе и n количестве говорящих на разном расстоянии и в разных направлениях. Теперь составьте матрицу уравнений для звука каждого динамика на основе вклада их амплитуды, частот и фазы. Нулевое пространство будет сформировано из всех возможных комбинаций, которые вы можете установить таким образом, что общий/наложенный звук в месте расположения наблюдателя будет равен нулю. То есть наблюдатель ничего не услышит, даже если динамики играют.
$\endgroup$
$\begingroup$
Это пространство решений матричного уравнения $AX=0$ . Он включает тривиальный вектор решения $0$. Если $A$ эквивалентна по строкам единичной матрице, то нулевой вектор является единственным элементом пространства решений. Если это не так, то есть когда пространство столбцов $A$ имеет размерность меньше, чем число столбцов A, тогда уравнение $AX=0$ имеет нетривиальные решения, которые образуют векторное пространство, размерность которого называется недействительностью. 9{max(n,m)}$, которые ортогональны базисным векторам $r$ A ). См. теорему о ранге недействительности. В простейшем примере, если $A=\left[\begin{array}{cc}
1&0\\
0&0
\конец{массив}\справа]
$, затем $span(A)=\alpha\left[\begin{array}{c}
1\\
0
\end{массив}\right], \alpha \in \mathbb{R}$ и $null(A)=\beta\left[\begin{array}{c}
0\\
1
\end{array}\right], \beta \in \mathbb{R}$
Он включает тривиальный вектор решения $0$. Если $A$ эквивалентна по строкам единичной матрице, то нулевой вектор является единственным элементом пространства решений. Если это не так, то есть когда пространство столбцов $A$ имеет размерность меньше, чем число столбцов A, тогда уравнение $AX=0$ имеет нетривиальные решения, которые образуют векторное пространство, размерность которого называется недействительностью. 9{max(n,m)}$, которые ортогональны базисным векторам $r$ A ). См. теорему о ранге недействительности. В простейшем примере, если $A=\left[\begin{array}{cc}
1&0\\
0&0
\конец{массив}\справа]
$, затем $span(A)=\alpha\left[\begin{array}{c}
1\\
0
\end{массив}\right], \alpha \in \mathbb{R}$ и $null(A)=\beta\left[\begin{array}{c}
0\\
1
\end{array}\right], \beta \in \mathbb{R}$
Поэкспериментируйте с «null» в базовом Matlab или SVD в Python, как в этом ответе, где видно, что любые нулевые собственные значения соответствуют к собственным векторам в левой матрице, которые охватывают нулевое пространство (см. также здесь)
также здесь)
$\endgroup$
$\begingroup$
В машиностроении пример $AX=B$ встречается в методе конечных элементов, где $KU=F$, где $K$ — матрица жесткости, $U$ — перемещение узлов, $F $ представляет собой сосредоточенные силы в тех же узлах. Пока $KU=0$, так как $U$ не равен нулевому вектору, это означает, что система, подобная конструкции, может двигаться без каких-либо развивающихся в ней сил, или она не будет препятствовать перемещению, определяемому $U$.
$\endgroup$
$\begingroup$
Существует другой взгляд на NullSpace матрицы AX = 0
- Мы можем думать о векторе X как о своего рода ортогональном векторе ко всем векторам, представленным в матрице A
- NullSpace матрицы A можно определить как множество всех возможных ортогональных векторов к матрице A
$\endgroup$
Поддержка миграции физических серверов в Azure Migrate — Azure Migrate
Редактировать
Твиттер LinkedIn Фейсбук Электронная почта
- Статья
- 4 минуты на чтение
В этой статье приведены параметры поддержки и ограничения для миграции физических серверов, виртуальных машин AWS и виртуальных машин GCP в Azure с помощью функции «Миграция и модернизация». Если вам нужна информация об оценке физических серверов для миграции в Azure, ознакомьтесь с матрицей поддержки оценки.
Миграция машин как физических
Вы можете мигрировать локальные машины как физические серверы, используя репликацию на основе агента. С помощью этого инструмента вы можете перенести в Azure широкий спектр машин:
- Локальные физические серверы.
- виртуальных машин, виртуализированных такими платформами, как Xen, KVM.
- виртуальных машин Hyper-V или VMware, если по какой-либо причине вы не хотите использовать стандартные потоки Hyper-V или VMware.
- ВМ, работающих в частных облаках.
- ВМ, работающие в публичных облаках, включая Amazon Web Services (AWS) или Google Cloud Platform (GCP).
Ограничения миграции
Вы можете выбрать до 10 машин одновременно для репликации. Если вы хотите перенести больше машин, реплицируйте их группами по 10.
Требования к физическому серверу
В таблице приведены сведения о поддержке физических серверов, виртуальных машин AWS и виртуальных машин GCP, которые вы хотите перенести с помощью миграции на основе агентов.
| Поддержка | Детали |
|---|---|
| Загрузка машины | Миграция Azure поддерживает миграцию любой рабочей нагрузки (например, Active Directory, SQL-сервера и т. д.), работающей на поддерживаемом компьютере. |
| Операционные системы | Для получения последней информации ознакомьтесь с информацией о поддержке Site Recovery операционной системой. Миграция Azure обеспечивает идентичную поддержку операционных систем. |
| Файловая система Linux/гостевое хранилище | Для получения последней информации ознакомьтесь с поддержкой файловой системы Linux для Site Recovery. Azure Migrate обеспечивает идентичную поддержку файловой системы Linux. Azure Migrate обеспечивает идентичную поддержку файловой системы Linux. |
| Сеть/хранилище | Для получения последней информации ознакомьтесь с предварительными требованиями к сети и хранилищу для Site Recovery. Миграция Azure предоставляет идентичные требования к сети/хранилищу. |
| Требования Azure | Для получения последней информации ознакомьтесь с требованиями к сети, хранилищу и вычислительным ресурсам Azure для Site Recovery. Миграция Azure имеет идентичные требования для миграции физических серверов. |
| Служба мобильности | Установите агент службы мобильности на каждую машину, которую вы хотите мигрировать. |
| Загрузка UEFI | Поддерживается. Машины на основе UEFI будут перенесены на виртуальные машины Azure поколения 2. Диск ОС должен иметь до четырех разделов, а тома должны быть отформатированы в NTFS. |
| UEFI — безопасная загрузка | Не поддерживается для миграции. |
| Целевой диск | Машины можно перенести только на управляемые диски (стандартный жесткий диск, стандартный твердотельный накопитель, твердотельный накопитель премиум-класса) в Azure. |
| Размер диска | до 2 ТБ диска ОС для ВМ 1-го поколения; диск ОС объемом до 4 ТБ для ВМ 2-го поколения; 32 ТБ для дисков с данными. |
| Дисковые ограничения | До 63 дисков на машину. |
| Зашифрованные диски/тома | Машины с зашифрованными дисками/томами не поддерживаются для миграции. |
| Общий дисковый кластер | Не поддерживается. |
| Независимые диски | Поддерживается. |
| Проходные диски | Поддерживается. |
| НФС | Тома NFS, смонтированные как тома на машинах, не будут реплицироваться. |
| цели iSCSI | Машины с целями iSCSI не поддерживаются для безагентной миграции. |
| Многопутевой ввод-вывод | Не поддерживается. |
| Объединенные сетевые карты | Не поддерживается. |
| IPv6 | Не поддерживается. |
| Драйверы PV / инструменты XenServer | Не поддерживается. |
Требования к устройству репликации
Если вы настраиваете устройство репликации вручную, убедитесь, что оно соответствует требованиям, приведенным в таблице. Когда вы настраиваете устройство репликации Azure Migrate как виртуальную машину VMware с помощью шаблона OVA, предоставленного в центре миграции Azure, устройство настраивается с Windows Server 2016 и соответствует требованиям поддержки.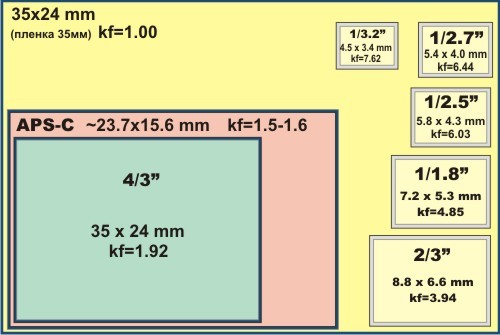
- Узнайте о требованиях к устройству репликации.
- Установите MySQL на устройство. Узнайте о вариантах установки.
- Узнайте об URL-адресах, к которым необходимо получить доступ устройству репликации.
Требования к виртуальным машинам Azure
Все локальные виртуальные машины, реплицированные в Azure, должны соответствовать требованиям к виртуальным машинам Azure, приведенным в этой таблице. Когда Site Recovery запускает проверку предварительных требований для репликации, проверка завершается ошибкой, если некоторые требования не выполняются.
| Компонент | Требования | Детали |
|---|---|---|
| Гостевая операционная система | Проверяет поддерживаемые операционные системы. Вы можете перенести любую рабочую нагрузку, работающую в поддерживаемой операционной системе. |
Проверка завершается неудачно, если не поддерживается.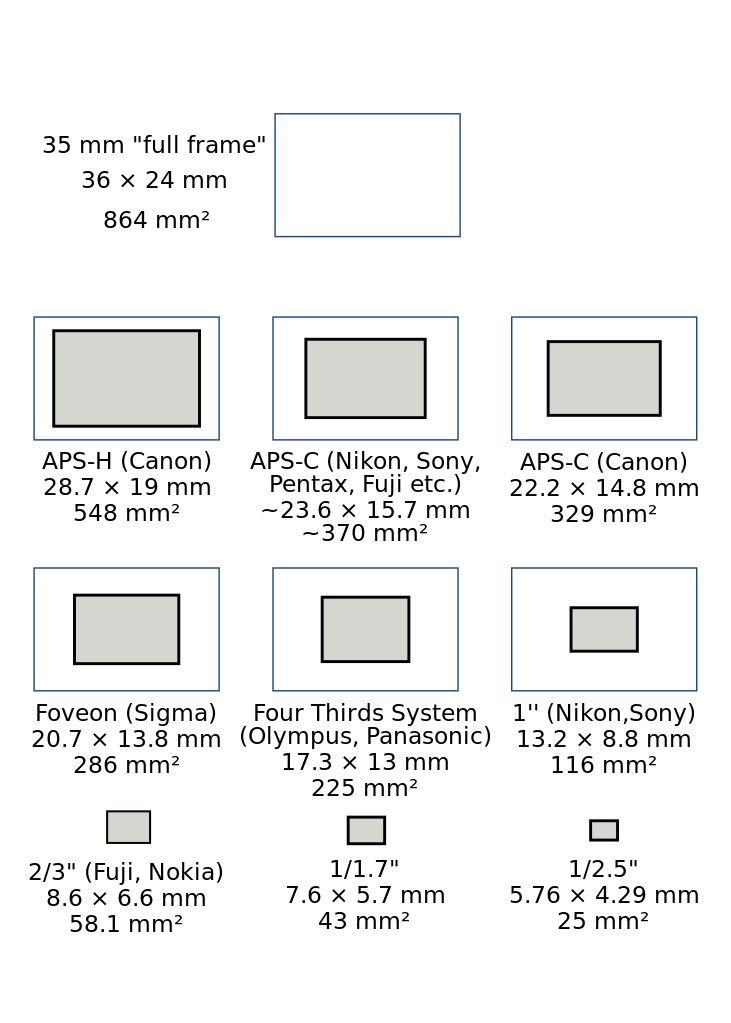 |
| Архитектура гостевой операционной системы | 64-бит. | Проверка завершается неудачно, если не поддерживается. |
| Размер диска операционной системы | До 2048 ГБ. | Проверка завершается неудачно, если не поддерживается. |
| Количество дисков операционной системы | 1 | Проверка завершается неудачно, если не поддерживается. |
| Количество дисков с данными | 64 или меньше. | Проверка завершается неудачно, если не поддерживается. |
| Размер диска данных | До 32 ТБ | Проверка завершается неудачно, если не поддерживается. |
| Сетевые адаптеры | Поддерживается несколько адаптеров. | |
| Общий виртуальный жесткий диск | Не поддерживается. | Проверка завершается неудачно, если не поддерживается. |
| Диск FC | Не поддерживается.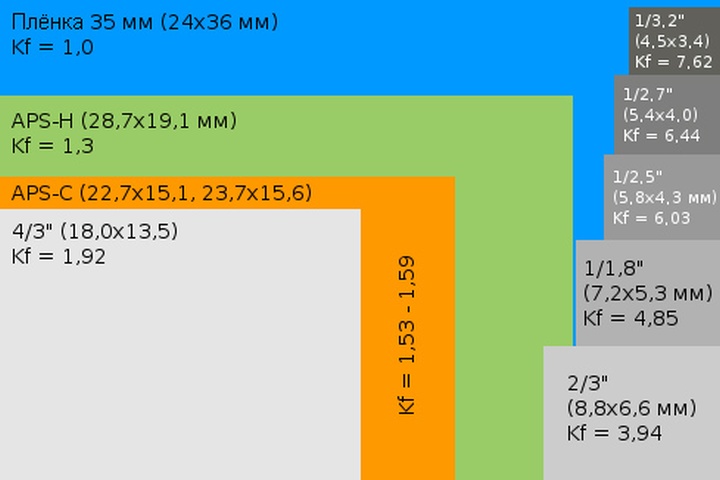 |
Проверка завершается неудачно, если не поддерживается. |
| BitLocker | Не поддерживается. | Отключите BitLocker перед включением репликации для машины. |
| Имя ВМ | От 1 до 63 символов. Только буквы, цифры и дефисы. Имя машины должно начинаться и заканчиваться буквой или цифрой. |
Обновите значение в свойствах машины в Site Recovery. |
| Подключиться после миграции — Windows | Для подключения к виртуальным машинам Azure под управлением Windows после миграции: — до миграции включает RDP на локальной виртуальной машине. Убедитесь, что для общедоступного профиля добавлены правила TCP и UDP и что RDP разрешен в Брандмауэр Windows > Разрешенные приложения , для всех профилей. Для доступа VPN типа «сеть-сеть» включите RDP и разрешите RDP в Брандмауэр Windows -> Разрешенные приложения и функции для доменных и частных сетей.  Физический размер матрицы: Размер матрицы. Что это такое?
|