Определение фокусного расстояния объектива
Системы безопасности
в Санкт-Петербурге
Главная/Полезная информация/Определение фокусного расстояния объектива
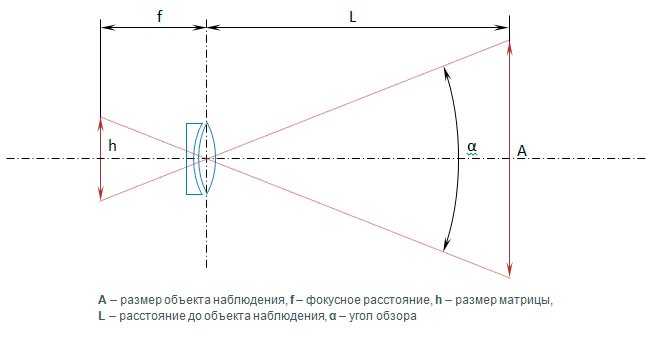
В системах охранного видеонаблюдения одним из важнейших параметров видеокамеры является фокусное расстояние объектива. Именно от фокусного расстояния объектива зависит угол обзора видеокамеры и детализация конкретного объекта наблюдения.
Для определения требуемого фокусного расстояния объектива используют следующие формулы:
где
S – расстояние до объекта слежения
v и h – вертикальные и горизонтальные размеры матрицы, которой оснащена видеокамера
V и H – вертикальный и горизонтальный размер объекта наблюдения
Существует три стандартных размера матриц, которые используются в видеокамерах охранного видеонаблюдения: 1/2, 1/3 и 1/4 дюйма. На практике наибольшее распространение получил формат матрицы 1/3 дюйма.
Размер матриц различного формата:
Матрица формата 1/2″: по вертикали 4.
Матрица формата 1/3″: по вертикали 3.6 мм, по горизонтали 4.8 мм
Матрица формата 1/4″: по вертикали 2.4 мм, по горизонтали 3.2 мм
Пример:
Необходимо наблюдать за объектом шириной 6 метров (легковая машина) с расстояния 30 метров с использованием видеокамеры с матрицей 1/3″
Вывод: фокусное расстояние объектива должно быть не менее 24 мм
В тестах разных производителей и авторов статей углы обзора объективов, а также расстояния для идентификации объекта могут отличаться. В качестве примера две таблицы ниже. Расчетные данные приводятся для видеокамер с форматом матрицы 1/3″.
Таблица 1
Таблица 2
Полезный совет:
Для конкретного случая в зависимости от поставленных задач и условий, целесообразно использовать объективы с переменным фокусным расстоянием (вариофокальные объективы), а также провести на объекте тестовые испытания различных моделей видеокамер и объективов.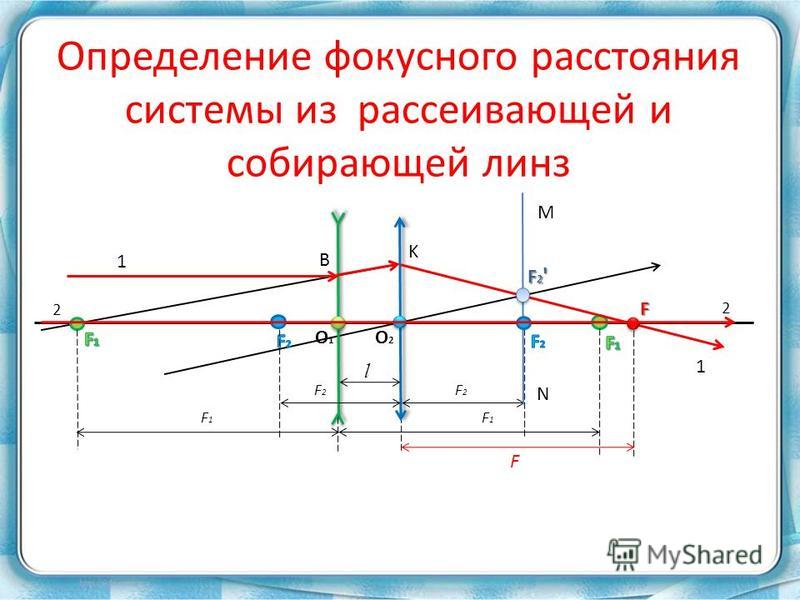
На практике можно отталкиваться от следующих правил:
- дистанция уверенного распознавания знакомого вам человека, выраженная в метрах, примерно соответствует фокусному расстоянию, выраженному в миллиметрах;
- дистанция для идентификации незнакомого человека. Значение фокусного расстояния объектива в миллиметрах примерно равно расстоянию до человека в метрах, деленное на два;
- дистанция для обнаружения человека в поле зрения камеры. Значение фокусного расстояния объектива в миллиметрах примерно равно расстоянию до человека в метрах, помноженное на семь;
- дистанция для распознавания номера автомобиля. Значение фокусного расстояния объектива в миллиметрах примерно в 1,5 раза меньше расстояния до номера автомобиля в метрах;
- для распознавания силуэта человека требуется, чтобы на экране монитора он занял 1/10 часть;
- для идентификации знакомого вам человека его фигура должна занимать 1/3 экрана монитора;
- для идентификации не известного вам лица на экране монитора необходимо отобразить 2/3 высоты человека;
- для распознавания номера автомобиля, номер должен занимать не менее 1/2 части экрана
Назад к списку
3.
 3. Определение фокусного расстояния тонкой линзы методом замещения.
3. Определение фокусного расстояния тонкой линзы методом замещения. Указатель на рейтере, по которому определяется положение главных плоскостей линзы, может быть установлен с некоторой погрешностью относительно плоскости, проходящей через середину линзы. Эта погрешность сказывается на точности определения фокусного расстояния (кроме того, в некоторых линзах положение главных плоскостей не совпадает с серединой линзы). Для того чтобы исключить влияние этой погрешности можно воспользоваться следующим способом определения фокусного расстояния.
Если расстояние между предметом и экраном превышает 4 f, то всегда найдутся два таких положения линзы, при которых на экране получаются резкие изображения предмета — уменьшенное и увеличенное (см. рис.12).
Обозначив расстояние между предметом и экраном буквой L, а расстояние между двумя положениями линзы, при которых наблюдаются резкие изображения, буквой l, можно записать:
I = a 2 (a 1 ) = a1 a2, (11)
L = a1 + a1 = a2 + a2 (12)
Из соображений симметрии видно, что
a1 = a2
и a
2 = a
 (13)
(13)
Отсюда
a1 = a2 = (L1)/2, (14)
a1 = a 2 = (L+1)/2. (15)
Подставляя а и а в формулу тонкой линзы, получим
f = (L2 – 12 )/4L (16)
Погрешность определения фокусного расстояния этим методом найдем, продифференцировав формулу (16)
(17)
Рис.12. К выводу формулы определения
фокусного расстояния методом замещения.
Описанные выше два способа позволяют определить фокусное расстояние только тонкой линзы и неприменимы к оптической системе, у которой главные плоскости не совпадают друг с другом. Кроме того, положение главных плоскостей не определено и относительно любых преломляющих плоскостей оптической системы.
Фокусное расстояние сложной системы можно определить по способу Аббе (рис.13).
Пусть предмет, линейный размер которого известен и равен y, находится на расстоянии z от переднего фокуса положительной оптической системы. Изображение этого предмета имеет линейный размер y1, поэтому линейное увеличение, как видно из подобных треугольников AFB и CFH, при этом будет равно:
Если теперь переместить предмет на расстояние x, так чтобы расстояние от предмета до переднего фокуса стало равным z2 , то линейное увеличение станет равным
2= —y2
/ y
= -f / (-z2)
. (19)
(19)
Рис.13. Определение фокусного расстояния методом Аббе.
Представив выражения (18) и (19) в виде
z1 = f/ 1 , z2 = f/ 2 (20)
где f= — f
и, вычитая эти два равенства друг из друга, получим
z1 (z2 ) = x = f (l / 1 – l / 2) (21)
Отсюда , (22)
Выражая 1 и 2 через линейные размеры предмета и изображений, получим формулу для расчета методом Аббе фокусного расстояния:
(23)
Видно, что в полученную формулу не входят
расстояния z1
и z2,
измерить которые экспериментально
невозможно, так как неизвестно положение
фокусов оптической системы.
Величина же смещения предмета из одного положения в другое (x) может быть легко измерена по смещению произвольной метки, жестко связанной с оптической системой, относительно предмета.
Дифференцируя формулу (23), получим формулу для вычисления погрешности определения фокусного расстояния методом Аббе:
, (24)
Видно, что для уменьшения погрешности необходимо увеличивать величину смещения предмета x, а также проводить измерения при таких увеличениях, чтобы размеры y1‘ и y‘2 заметно отличались (т. е. разница y1 y2 должна быть максимально возможной).
Основы обработки изображений — Расчет фокусного расстояния объектива — 1stVision Inc.
В любом промышленном приложении для обработки изображений перед нами стоит задача выбора нескольких основных компонентов для решения поставленной задачи.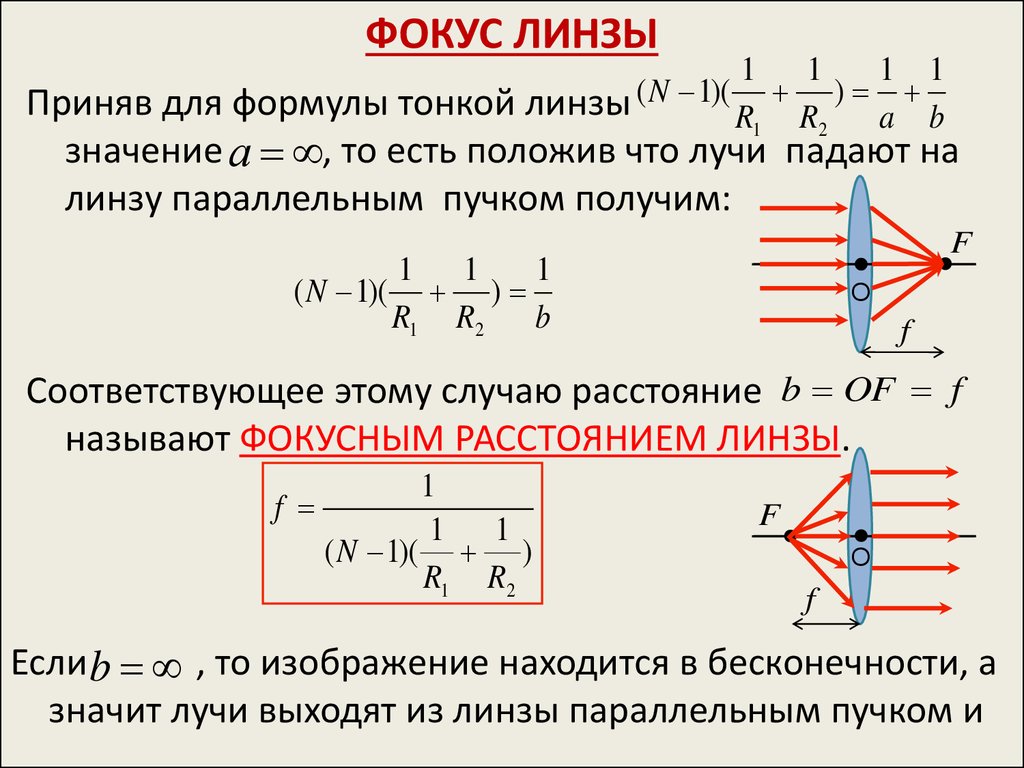 Первая — это промышленная камера, а вторая — объектив для получения заданного изображения. Во многих случаях рабочее расстояние нашего объектива ограничено, и, возможно, придется установить камеру ближе или дальше от плоскости объекта. После установки это определяет наше рабочее расстояние (WD) для объектива. Кроме того, у нас есть заданное поле зрения (в основном размер изображения) нужного объекта.
Первая — это промышленная камера, а вторая — объектив для получения заданного изображения. Во многих случаях рабочее расстояние нашего объектива ограничено, и, возможно, придется установить камеру ближе или дальше от плоскости объекта. После установки это определяет наше рабочее расстояние (WD) для объектива. Кроме того, у нас есть заданное поле зрения (в основном размер изображения) нужного объекта.
Чтобы правильно выбрать объектив с фокусным расстоянием, которое указывается в миллиметрах (т.е. фокусное расстояние 25 мм), нам нужна дополнительная информация о сенсоре камеры. Датчики камеры бывают разных «форматов изображения». В приведенной ниже таблице указаны некоторые распространенные форматы, относящиеся к размеру сенсора. Размер датчика можно найти в технических описаниях датчиков, если он не указан в данной таблице.
В этом упражнении мы хотим изобразить объект, который находится на расстоянии 400 мм от передней части объектива до объекта, и нам нужно поле зрения 90мм.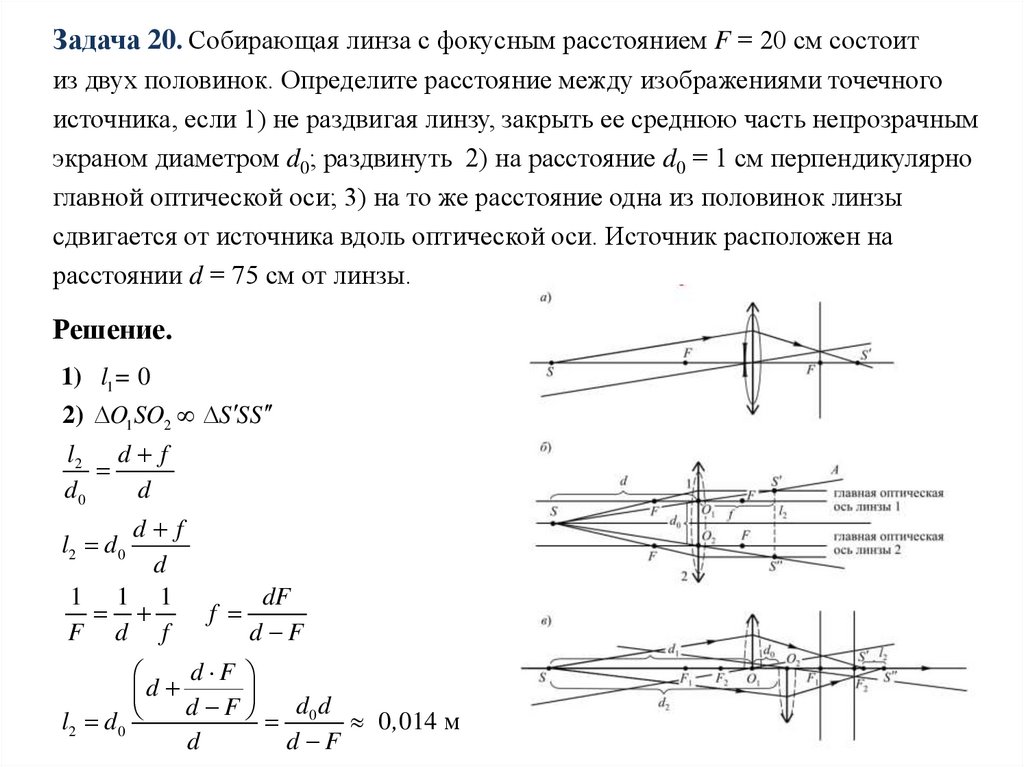
Мы выбрали камеру с сенсором Sony Pregius CMOS IMX174. При этом используется формат 1/1,2″ размером 10,67 мм x 8 мм.
На данный момент у нас есть следующие известные значения:
Поле зрения (FOV) = 90 мм
Рабочее расстояние (WD) = 400 мм
Размер сенсора = 9100168 90 мм по горизонтали FOV, в свою очередь, используйте размер сенсора по горизонтали
Основная формула для расчета фокусного расстояния объектива выглядит следующим образом:
FL = (размер сенсора * WD) / FOV
Используя значения из нашего приложения,
FL = (10,67 мм * 400 мм) / 90 мм
FL = 47,4 мм
Объективы доступны только в готовом виде. различных фокусных расстояний (например, 25 мм, 35 мм, 50 мм), поэтому этот расчет является теоретическим и может потребовать итерации для настройки рабочего расстояния. В качестве альтернативы, если ваше приложение может иметь немного меньшее или большее поле зрения, может подойти объектив с ближайшим фокусным расстоянием для вашего расчета.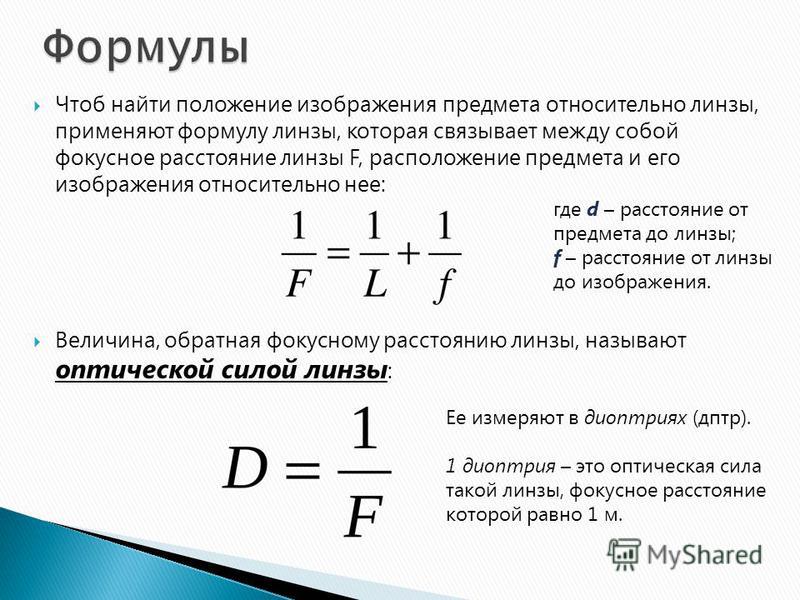
1st Vision немного упростил расчет фокусного расстояния объектива! Как и в инженерном деле, полезно знать базовые формулы, но в практическом плане хотелось бы упростить жизнь с помощью инструментов
Наш калькулятор объективов вы найдете ЗДЕСЬ. В качестве альтернативы при выборе камеры вы найдете значок справа, который автоматически заполнит калькулятор. Ниже короткое видео, показывающее, как пользоваться этим ресурсом со страниц камеры.
Несколько дополнительных соображений при выборе объектива:
- Объективы имеют минимальное рабочее расстояние (MOD), поэтому это следует учитывать при рассмотрении настроек объектива. Модификации можно найти на странице объективов для данных объективов.
- Объективы должны быть сопряжены с соответствующим датчиком. Например, если у вас сенсор 1/2″, вам необходимо убедиться, что вы используете объектив формата 1/2″ или больше.
- При выборе объектива необходимо убедиться, что объектив имеет достаточное разрешение (в линпах/мм) для разрешения пикселей на вашей камере. Обязательно внимательно просмотрите эти данные после того, как определите желаемое фокусное расстояние. Демистификация спецификаций объектива дает дополнительное понимание.
Связанные блоги:
Демистификация спецификаций объектива
Понимание объектива MTF
Расчет разрешения для машинного зрения 1st Vision может предоставить комплексное решение, включая линзы, кабели и освещение.
www.1stvision.com
Тел.: 978-474-0044
Не забудьте подписаться на нас в социальных сетях!
(Посетили 9 559 раз, 1 раз сегодня)
Как определить фокусное расстояние, измеренное от кончика сопла.
Как определить фокусное расстояние, измеренное от кончика сопла.
Здесь я описываю один метод определения правильного уровня сопла, чтобы вы могли получить оптимальное фокусное расстояние от кончика сопла, а не от линзы в сборке. Попытка определить длину от линзы до обрабатываемой поверхности очень сложна, потому что линза скрыта в узле сопла. Эта методика позволит определить это расстояние от кончика сопла до рабочей поверхности.
Попытка определить длину от линзы до обрабатываемой поверхности очень сложна, потому что линза скрыта в узле сопла. Эта методика позволит определить это расстояние от кончика сопла до рабочей поверхности.
Идея состоит в том, чтобы использовать наклонную поверхность. Так как сопло во время генерации движется с постоянной скоростью, обнаружится коническая форма боба по длине генерации. Ключевым моментом здесь является поддержание постоянной скорости, особенно если вы работаете на дереве. Скорость не так важна при генерации лазера на анодированном алюминии, поскольку луч лазера должен быть относительно хорошо сфокусирован на анодированном алюминии, чтобы увидеть метку.
Говоря об анодированном алюминии, с помощью этой методики диапазон фокусных расстояний теперь можно определить очень быстро. Расстояние оптимального диапазона можно определить, вычитая высоту склона из начала отметки и высоту конца отметки. Затем расстояние диапазона можно разделить на два, чтобы определить наиболее оптимальное фокусное расстояние.
Цель всего этого состоит в том, чтобы сконструировать проходной датчик, который можно использовать для установки высоты сопла каждый раз, когда вы кладете очередную заготовку для лазерной обработки. После определения оптимального фокусного расстояния для используемого вами объектива приготовьте брусок из материала, предпочтительно дерева, поскольку его характеристики стабильны при перепадах температур, и сформируйте материал так, чтобы он соответствовал этому расстоянию, и пометьте брусок фактическим фокусным расстоянием объектива, чтобы вы можете связать правильный блок для объектива, который вы используете для своего конкретного приложения. Вы даже можете создать блок для разных уровней, чтобы толстые материалы можно было обрабатывать лазером и резать за несколько проходов.
Итак, вот как выполнить эту задачу по определению оптимального фокусного расстояния от кончика сопла:
- Используйте ненужный кусок материала, который можно пометить лазером. Чем меньше гибкость, тем лучше.
 Выберите длину, которая создаст наклон, который не будет слишком крутым, чтобы было трудно определить оптимальную точку, или слишком пологим, чтобы оптимальный участок был слишком длинным.
Выберите длину, которая создаст наклон, который не будет слишком крутым, чтобы было трудно определить оптимальную точку, или слишком пологим, чтобы оптимальный участок был слишком длинным. - Совместите этот материал с осью x, осью движения сопла из стороны в сторону.
- Ослабьте крепление форсунки и сдвиньте форсунку вверх в самой высокой точке.
- Используйте какой-нибудь материал для поддержки одной стороны материала для маркировки. Высокая сторона должна быть как можно ближе к соплу на тот случай, если у вас объектив с коротким фокусным расстоянием.
- Отрегулируйте скорость подачи в управляющем программном обеспечении для ручного толчкового режима примерно на 80 дюймов в минуту, это может отличаться в зависимости от материала, который вы будете обрабатывать лазером.
- Наденьте защитные очки и закройте корпус лазера.
- Расположите насадку на одном конце наклонного материала.
- Включите лазер и пройдитесь к другому концу наклонного материала, а затем выключите лазер.
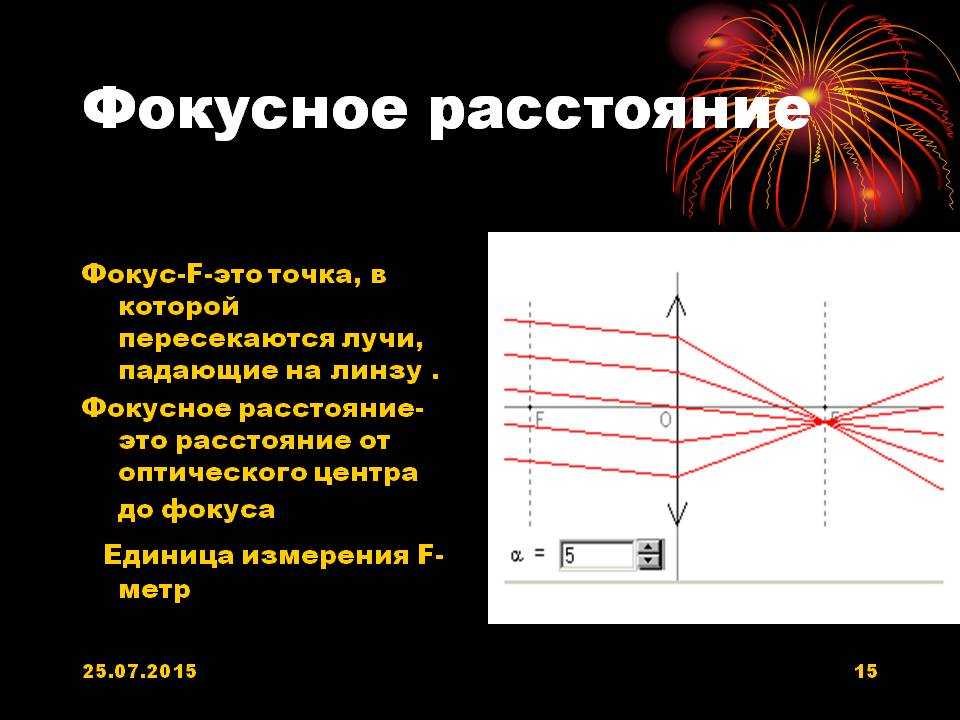
 Как определить фокусное расстояние: Линзы. Фокусное расстояние — урок. Физика, 9 класс.
Как определить фокусное расстояние: Линзы. Фокусное расстояние — урок. Физика, 9 класс.