Страница не найдена — Снимай как профессионал
Что-то пошло не так… Попробуйте начать свой поиск с главной страницы
Как сжать фотографию без потери качестваВсе современные цифровые средства фотографирования — смартфоны и цифровые фотоаппараты — позволяют делать высококачественные снимки. И чем качественней фотоснимок, тем…
27.07.2020
Сергей
Постоянный или импульсный свет в фотографииЧто выбрать, постоянный или импульсный свет в фотографии? Каждый из них обладает своими преимуществами, поэтому разберем, как использовать оба типа.
20.07.2020
Сергей
Правильное размещение человека в кадреКак правильно размещать людей в кадре? Рассмотрим основные методы, как выигрышно расположить людей в кадре, и правила построения композиции портретов.
20.07.2020
Сергей
Идеи для осенней фотосессии Разберем подробнее каждый вариант.
Разберем подробнее каждый вариант.20.07.2020
Сергей
Мягкий свет в фотографииФотографии с мягким освещением выглядят более профессионально и качественно. Используйте описанные в статье приемы и вы заметите, как улучшились результаты.
20.07.2020
Сергей
Как направить взгляд зрителя на снимкахКак направить взгляд зрителя на снимках, чтобы кадр стал шедевром и не затерялся среди миллионов других снимков. Рассмотрим основные правила и частые ошибки
20.07.2020
Сергей
Цветовой контраст в фотографииЦветовой контраст в фотографии очень важен для получения хорошего кадра. В статье рассматриваются основные вопросы цветовой композиции и разбираются ошибки.
20.07.2020
Сергей
Ошибки при съемке тортовНовички совершают одни и те же ошибки, снимая торты. Расмотрим самые распространенные, изучив которые, удастся выйти на хороший уровень при съемке десертов.
Расмотрим самые распространенные, изучив которые, удастся выйти на хороший уровень при съемке десертов.
20.07.2020
Сергей
Как правильно снимать с внешней вспышкойВажным помощником фотографа является фотовспышка. Рассмотрим, как выбрать вспышку и аксессуары к ней, как снимать с внешней вспышкой и как избежать ошибок.
20.07.2020
Сергей
Как снимать в контровом светеПрименение контрового света позволяет получить уникальные фотоработы. В статье описывается, как снимать в контровом свете и избежать основных ошибок.
20.07.2020
Сергей
Кольцевой источник света стал широко использоваться в фотографии. Рассмотрим, как использовать кольцевой свет, достоинства и недостатки таких источников.
20.07.2020
Сергей
Как самостоятельно сделать кольцевой светХотите поснимать с кольцевым источником, но не готовы сильно тратиться? В статье даны практические рекомендации, как самостоятельно сделать кольцевой свет.
20.07.2020
Сергей
Рейтинг портретных объективовЧтобы повысить качество портретных фотографий, лучше обзавестись специальным объективом. Выбрать его поможет наш рейтинг портретных объективов.
20.07.2020
Сергей
Секреты качественной фуд-фотографии Хотите научиться красиво снимать еду? Рассмотрим секреты качественной фуд-фотографии и технические приёмы: как выставить свет и организовать композицию.20.07.2020
Сергей
Что нужно для фотосессии детейСамое главное для детской фотосессии — это естественность и настоящие эмоции. Как настроить камеру и что нужно для фотосессии можно узнать из данной статьи.
20.07.2020
Сергей
Размытие фона на фотографииПри помощи размытого фона можно выделить объект съёмки и исключить ненужные детали. Рассмотрим, как добиться такого эффекта при съёмке или используя фотошоп
20. 07.2020
07.2020
Сергей
Как подобрать фотофон для предметной съемкиКак подобрать фотофон для предметной съемки? Рассмотрим, на что обратить внимание, как сэкономить на покупке, какие нюансы учитывать, фотографируя предметы.
20.07.2020
Сергей
Съемка черно-белого портретаХотите снять эффектный черно-белый портрет? Рассмотрим основные нюансы, правила композиции, как пользоваться светом и другими инструментами фотографа.
20.07.2020
Сергей
Основы предметной съемкиНовичкам, решившим освоить предметную съемку, стоит изучить ее основы. Рассмотрим, с чего начать, как правильно подобрать фон и свет, как настроить камеру.
20.07.2020
Сергей
Какие аксессуары необходимы для предметной съемкиХотите стать предметным фотографом? Узнав, какие аксессуары необходимы для предметной съемки и обзаведясь ими, будет проще делать качественные фотографии.
20.07.2020
Сергей
Как сделать фотобокс для предметной съемки своими рукамиФотобокс для предметной съемки несет в себе много пользы. Рассмотрим, как и из чего можно сделать лайтбокс своими руками без ущерба качеству получаемых фото
20.07.2020
Сергей
Страница не найдена — Снимай как профессионал
Что-то пошло не так… Попробуйте начать свой поиск с главной страницы
Как сжать фотографию без потери качестваВсе современные цифровые средства фотографирования — смартфоны и цифровые фотоаппараты — позволяют делать высококачественные снимки. И чем качественней фотоснимок, тем…
27.07.2020
Сергей
Постоянный или импульсный свет в фотографииЧто выбрать, постоянный или импульсный свет в фотографии? Каждый из них обладает своими преимуществами, поэтому разберем, как использовать оба типа.
20.07.2020
Сергей
Правильное размещение человека в кадреКак правильно размещать людей в кадре? Рассмотрим основные методы, как выигрышно расположить людей в кадре, и правила построения композиции портретов.
20.07.2020
Сергей
Идеи для осенней фотосессииИдеи для осенней фотосессии в солнечную и пасмурную погоду, дождь и туман помогут пополнить альбом сказочными кадрами. Разберем подробнее каждый вариант.
20.07.2020
Сергей
Мягкий свет в фотографииФотографии с мягким освещением выглядят более профессионально и качественно. Используйте описанные в статье приемы и вы заметите, как улучшились результаты.
20.07.2020
Сергей
Как направить взгляд зрителя на снимках Как направить взгляд зрителя на снимках, чтобы кадр стал шедевром и не затерялся среди миллионов других снимков. Рассмотрим основные правила и частые ошибки
Рассмотрим основные правила и частые ошибки20.07.2020
Сергей
Цветовой контраст в фотографииЦветовой контраст в фотографии очень важен для получения хорошего кадра. В статье рассматриваются основные вопросы цветовой композиции и разбираются ошибки.
20.07.2020
Сергей
Ошибки при съемке тортовНовички совершают одни и те же ошибки, снимая торты. Расмотрим самые распространенные, изучив которые, удастся выйти на хороший уровень при съемке десертов.
20.07.2020
Сергей
Как правильно снимать с внешней вспышкойВажным помощником фотографа является фотовспышка. Рассмотрим, как выбрать вспышку и аксессуары к ней, как снимать с внешней вспышкой и как избежать ошибок.
20.07.2020
Сергей
Как снимать в контровом светеПрименение контрового света позволяет получить уникальные фотоработы. В статье описывается, как снимать в контровом свете и избежать основных ошибок.
В статье описывается, как снимать в контровом свете и избежать основных ошибок.
20.07.2020
Сергей
Как использовать кольцевой светКольцевой источник света стал широко использоваться в фотографии. Рассмотрим, как использовать кольцевой свет, достоинства и недостатки таких источников.
20.07.2020
Сергей
Как самостоятельно сделать кольцевой светХотите поснимать с кольцевым источником, но не готовы сильно тратиться? В статье даны практические рекомендации, как самостоятельно сделать кольцевой свет.
20.07.2020
Сергей
Рейтинг портретных объективовЧтобы повысить качество портретных фотографий, лучше обзавестись специальным объективом. Выбрать его поможет наш рейтинг портретных объективов.
20.07.2020
Сергей
Секреты качественной фуд-фотографииХотите научиться красиво снимать еду? Рассмотрим секреты качественной фуд-фотографии и технические приёмы: как выставить свет и организовать композицию.
20.07.2020
Сергей
Что нужно для фотосессии детейСамое главное для детской фотосессии — это естественность и настоящие эмоции. Как настроить камеру и что нужно для фотосессии можно узнать из данной статьи.
20.07.2020
Сергей
Размытие фона на фотографии20.07.2020
Сергей
Как подобрать фотофон для предметной съемкиКак подобрать фотофон для предметной съемки? Рассмотрим, на что обратить внимание, как сэкономить на покупке, какие нюансы учитывать, фотографируя предметы.
20.07.2020
Сергей
Съемка черно-белого портретаХотите снять эффектный черно-белый портрет? Рассмотрим основные нюансы, правила композиции, как пользоваться светом и другими инструментами фотографа.
20.07.2020
Сергей
Основы предметной съемкиНовичкам, решившим освоить предметную съемку, стоит изучить ее основы. Рассмотрим, с чего начать, как правильно подобрать фон и свет, как настроить камеру.
20.07.2020
Сергей
Какие аксессуары необходимы для предметной съемкиХотите стать предметным фотографом? Узнав, какие аксессуары необходимы для предметной съемки и обзаведясь ими, будет проще делать качественные фотографии.
20.07.2020
Сергей
Как сделать фотобокс для предметной съемки своими рукамиФотобокс для предметной съемки несет в себе много пользы. Рассмотрим, как и из чего можно сделать лайтбокс своими руками без ущерба качеству получаемых фото
20.07.2020
Сергей
Страница не найдена — Снимай как профессионал
Что-то пошло не так… Попробуйте начать свой поиск с главной страницы
Как сжать фотографию без потери качестваВсе современные цифровые средства фотографирования — смартфоны и цифровые фотоаппараты — позволяют делать высококачественные снимки. И чем качественней фотоснимок, тем…
И чем качественней фотоснимок, тем…
27.07.2020
Сергей
Постоянный или импульсный свет в фотографииЧто выбрать, постоянный или импульсный свет в фотографии? Каждый из них обладает своими преимуществами, поэтому разберем, как использовать оба типа.
20.07.2020
Сергей
Правильное размещение человека в кадреКак правильно размещать людей в кадре? Рассмотрим основные методы, как выигрышно расположить людей в кадре, и правила построения композиции портретов.
20.07.2020
Сергей
Идеи для осенней фотосессииИдеи для осенней фотосессии в солнечную и пасмурную погоду, дождь и туман помогут пополнить альбом сказочными кадрами. Разберем подробнее каждый вариант.
20.07.2020
Сергей
Мягкий свет в фотографииФотографии с мягким освещением выглядят более профессионально и качественно. Используйте описанные в статье приемы и вы заметите, как улучшились результаты.
Используйте описанные в статье приемы и вы заметите, как улучшились результаты.
20.07.2020
Сергей
Как направить взгляд зрителя на снимкахКак направить взгляд зрителя на снимках, чтобы кадр стал шедевром и не затерялся среди миллионов других снимков. Рассмотрим основные правила и частые ошибки
20.07.2020
Сергей
Цветовой контраст в фотографииЦветовой контраст в фотографии очень важен для получения хорошего кадра. В статье рассматриваются основные вопросы цветовой композиции и разбираются ошибки.
20.07.2020
Сергей
Ошибки при съемке тортовНовички совершают одни и те же ошибки, снимая торты. Расмотрим самые распространенные, изучив которые, удастся выйти на хороший уровень при съемке десертов.
20.07.2020
Сергей
Как правильно снимать с внешней вспышкойВажным помощником фотографа является фотовспышка. Рассмотрим, как выбрать вспышку и аксессуары к ней, как снимать с внешней вспышкой и как избежать ошибок.
Рассмотрим, как выбрать вспышку и аксессуары к ней, как снимать с внешней вспышкой и как избежать ошибок.
20.07.2020
Сергей
Как снимать в контровом светеПрименение контрового света позволяет получить уникальные фотоработы. В статье описывается, как снимать в контровом свете и избежать основных ошибок.
20.07.2020
Сергей
Как использовать кольцевой светКольцевой источник света стал широко использоваться в фотографии. Рассмотрим, как использовать кольцевой свет, достоинства и недостатки таких источников.
20.07.2020
Сергей
Как самостоятельно сделать кольцевой светХотите поснимать с кольцевым источником, но не готовы сильно тратиться? В статье даны практические рекомендации, как самостоятельно сделать кольцевой свет.
20.07.2020
Сергей
Рейтинг портретных объективовЧтобы повысить качество портретных фотографий, лучше обзавестись специальным объективом. Выбрать его поможет наш рейтинг портретных объективов.
Выбрать его поможет наш рейтинг портретных объективов.
20.07.2020
Сергей
Секреты качественной фуд-фотографииХотите научиться красиво снимать еду? Рассмотрим секреты качественной фуд-фотографии и технические приёмы: как выставить свет и организовать композицию.
20.07.2020
Сергей
Что нужно для фотосессии детейСамое главное для детской фотосессии — это естественность и настоящие эмоции. Как настроить камеру и что нужно для фотосессии можно узнать из данной статьи.
20.07.2020
Сергей
Размытие фона на фотографииПри помощи размытого фона можно выделить объект съёмки и исключить ненужные детали. Рассмотрим, как добиться такого эффекта при съёмке или используя фотошоп
20.07.2020
Сергей
Как подобрать фотофон для предметной съемкиКак подобрать фотофон для предметной съемки? Рассмотрим, на что обратить внимание, как сэкономить на покупке, какие нюансы учитывать, фотографируя предметы.
20.07.2020
Сергей
Съемка черно-белого портретаХотите снять эффектный черно-белый портрет? Рассмотрим основные нюансы, правила композиции, как пользоваться светом и другими инструментами фотографа.
20.07.2020
Сергей
Основы предметной съемкиНовичкам, решившим освоить предметную съемку, стоит изучить ее основы. Рассмотрим, с чего начать, как правильно подобрать фон и свет, как настроить камеру.
20.07.2020
Сергей
Какие аксессуары необходимы для предметной съемкиХотите стать предметным фотографом? Узнав, какие аксессуары необходимы для предметной съемки и обзаведясь ими, будет проще делать качественные фотографии.
20.07.2020
Сергей
Как сделать фотобокс для предметной съемки своими рукамиФотобокс для предметной съемки несет в себе много пользы.![]() Рассмотрим, как и из чего можно сделать лайтбокс своими руками без ущерба качеству получаемых фото
Рассмотрим, как и из чего можно сделать лайтбокс своими руками без ущерба качеству получаемых фото
20.07.2020
Сергей
Матрица-сенсор фотокамеры | Уроки фотографии
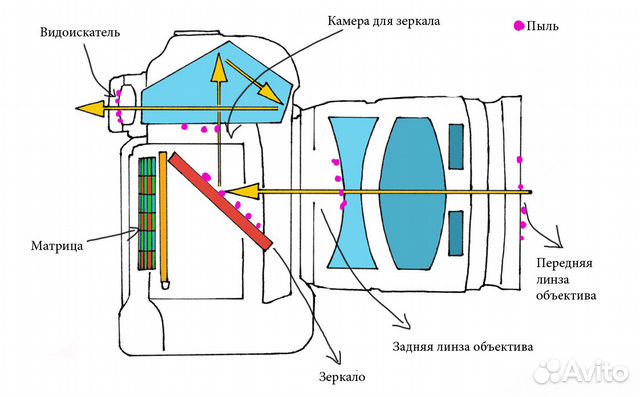
Для того чтобы получить изображение в цифровой фотокамере используется специализированная интегральная микросхема, которая состоит из фотодиодов. Эта микросхема имеет название – матрица (сенсор). Светочувствительная матрица преобразовывает спроецированное объективом оптическое изображение в цифровой сигнал.
Матрица состоит из огромного количества микроскопических элементов – пикселей. При нажатии кнопки затвора фотокамеры (начале экспозиции), каждый из пикселей поглощает определенное число фотонов. После завершения экспозиции выполняется подсчет количества света попавшего на каждый пиксель. Затем, это количество переводится в уровни интенсивности (в диапазоне от 0 до 255 для 8-ми битного изображения).
Фильтр Байера
Поскольку данные, поступающие от пикселей не содержат информации о том, сколько и какого цвета попадает в них, то вышеописанным способом можно получать только черно-белые изображения. Для получения цветного изображения используют цветовые фильтры, которые размещаются над всеми пикселями матрицы. Каждый такой фильтр способен пропускать исключительно определенный цвет.
Для получения цветного изображения используют цветовые фильтры, которые размещаются над всеми пикселями матрицы. Каждый такой фильтр способен пропускать исключительно определенный цвет.
Практически все современные цифровые камеры используют пиксели учитывающие только один из трех основных цветов (красный, синий или зеленый), поэтому они отсеивают примерно 2/3 первоначальной силы света. Для исправления этого, информация о силе света восполняется на основе данных соседних пикселей.
Наиболее распространенный тип расположения цветных фильтров носит название шаблон (или фильтр) Байера. Он состоит из рядов красно-зеленых и зелено-синих цветофильтров. Как видим, при этом используется следующее соотношение цветовых фильтров: зеленые – 50%, красные – 25%, синие – 25%.
Как видим, шаблон Байера имеет в два раза больше чувствительных элементов улавливающих зеленый цвет. Разрешающая способность такой матрицы максимальна в зеленой области спектра, что соответствует особенностям зрения человека. Также изображение кажется менее шумным и более четким, чем при одинаковом количестве фильтров разных цветов.
Также изображение кажется менее шумным и более четким, чем при одинаковом количестве фильтров разных цветов.
Шаблон Байера используют не все производители фотокамер. Например, широко известная фирма Sony использует четырехцветный фильтр, в котором к трем основным цветам добавлен еще изумрудно-зеленый. А в цифровых камерах производителя Sigma используют матрицу Foveon, где пикселы пропускают все три цвета.
Дебайеризация
Использование мозаичного шаблона Байера не дает полноты цветного изображения для отдельного пикселя. Для его получения требуется восстановление отсутствующих цветов. Восстанавливаются недостающие цветные элементы при помощи сложного алгоритма. Такой процесс называется дебайеризацией или демозаикой. Дебайеризация может происходить на заключительном этапе обработки первичной информации, или быть заложенной в программное обеспечение цифровой камеры.
Например, давайте рассмотрим набор 2×2, состоящий из пикселей с двумя зелеными, красным и синим светофильтрами как одну полноцветную ячейку. В принципе, такого набора достаточно для восстановления полного цвета, но если камера будет рассматривать каждый такой набор как отдельную точку, то ее разрешение упадет вдвое как по горизонтали, так и по вертикали.
В принципе, такого набора достаточно для восстановления полного цвета, но если камера будет рассматривать каждый такой набор как отдельную точку, то ее разрешение упадет вдвое как по горизонтали, так и по вертикали.
Поэтому подавляющее большинство производителей производят дополнительные операции, для восстановления первоначальной информации о изображении. Например, используют перекрывающие цветовые массивы 2х2. На следующем рисунке вы можете видеть один из вариантов такого перекрытия.
Внимательные читатели возможно заметят, что на этой схеме показаны расчеты для ячеек имеющих соседние ячейки со всех своих сторон. А что будет если ячейка расположена с самого края матрицы? Вероятно расчеты ее цветовых характеристик будут менее точными, ведь по крайней мере с одной стороны у нее не будет соседних. Это, конечно, неприятно, но не смертельно — для современных матриц с миллионами пикселей недостаточная информация о цвете «пограничных» ячеек несущественна.
Некоторые фотокамеры используют и другие алгоритмы расчета цвета пикселей матрицы, используемые для увеличения разрешения, получение менее шумного изображения или же адаптивного реагирования на различные участки изображения.
Артефакты матрицы
Передача изображений, в которых присутствуют мелкие детали, иногда сбивают нормальную работу алгоритма работы сенсорной матрицы. Как правило, это происходит при фотографировании объектов на пределе разрешающей способности цифрового сенсора. При таком сбое изображение получается неестественное, а с так называемым муаром. Это могут быть дефекты передачи цвета, текстуры, которые повторяются, замысловатые лабиринты из пикселей и т. д.
На следующих снимках вы можете видеть четыре изображения с различным увеличением. Муар проявляется на третьем изображении в первом ряду и на всех уменьшенных в нижнем. В уменьшенной версии третьего изображения можно видеть не только искажение формы узора, но и цвета.
Следует учитывать, что данные дефекты зависят не только от фотографируемого объекта, но и от программной «начинки» камеры, которая отвечает за создание исходного (RAW) файла.
Для избавления от эффекта муара можно попробовать изменить настройки снимка — контраста и цветонасыщенности. В данном случае произойдет коррекция резкости. Среди других методов ослабления муара можно отметить изменение положения камеры и объекта, или же использование объектива с другим фокусным расстоянием.
В данном случае произойдет коррекция резкости. Среди других методов ослабления муара можно отметить изменение положения камеры и объекта, или же использование объектива с другим фокусным расстоянием.
Это неизбежное следствие любой системы, которая разбивает непрерывный аналоговый сигнал на раздельные (дискретные) интервалы. По этой причине практически каждый фотографический сенсор имеет так называемый оптический фильтр нижних частот (OLPF) или фильтр сглаживания (АА). Он размещается непосредственно перед сенсором и эффективно размывает любые потенциально проблематичные детали, которые мельче разрешения датчика.
Микролинзы матрицы
Представляя фотоматрицу, многие думают, что светочувствительные элементы в ней размещены вплотную друг к другу. Однако это не так — зачастую под них приходиться только около половины поверхности всего сенсора. Остальное место занимает различная вспомогательная электроника.
Для того чтобы свет, попадающий на пространство между светочувствительными элементами, не пропадал зря, над пикселями устанавливаются микролинзы. Они позволяют собрать все фотоны в единый световой поток и направить его на светочувствительную часть ячейки.
Они позволяют собрать все фотоны в единый световой поток и направить его на светочувствительную часть ячейки.
Микролинзы значительно повышают сбор фотонов каждой пиксельной ячейкой. Это, безусловно, помогает созданию качественных изображений с наименьшим содержанием шумов.
Проблемы с матрицей фотоаппарата — Dudom
Все вещи ломаются и выходят из строя, не составляют и исключение цифровые фотоаппараты. Чем нежнее техника, тем чаще могут встречаться те или иные поломки. Неисправности условно разделяются на физические и технические. К физическим поломкам относятся: попадание влаги или песка внутрь корпуса, механические повреждения, перегрев фотокамеры. К техническим неисправностям относятся сбои в программном обеспечении, неисправность матрицы, повреждения объектива или дисплея и т.д.
Больше половины не гарантийных ремонтов приходится из-за механических повреждений, так как фотоаппарат является переносным оборудованием, то часто его роняют иногда удачно, а иногда и не удачно. В результате падения может повредиться не только корпус, но и внутренние его части, такие как объектив, системная плата, экран.
В результате падения может повредиться не только корпус, но и внутренние его части, такие как объектив, системная плата, экран.
Много ремонтов происходит из-за такой неполадки как попадание влаги внутрь фотоаппарата. Если случилась такая неприятность, и вы случайно уронили фотокамеру в воду или намочили ее, то нужно сразу же вынуть аккумуляторы питания и отнести ее в сервисный центр. Попадание влаги внутрь грозит окислению практически всех деталей, а если же она побывала еще и в морской воде, то соль может разъесть мелкие соединения. Так что если на первый взгляд вам показалось, что все в порядке и фотоаппарат работает, то лучше всего не тянуть, а отнести его специалистам.
Одной из самых распространенных поломок фотоаппарата является нерабочее программное обеспечение, без него он либо работает не корректно, либо вообще не включается. С такой проблемой лучше идти ни в интернет или горе-мастерам, а прямо в сервисный центр, пока есть шанс реабилитировать то, что осталось.
Также в цифровых фотоаппаратах ломается выдвижной механизм объектива, довольно хрупкая вещь. Часто из строя выходит матрица, а вот поломок связанных с выходом из строя системной платы достаточно маленький процент.
Часто из строя выходит матрица, а вот поломок связанных с выходом из строя системной платы достаточно маленький процент.
В любом случае, что бы у вас не сломалось в цифровом фотоаппарате не стоит откладывать визит в сервисный центр, ведь жизнь не стоит на месте, есть много моментов, которые просто необходимо сфотографировать.
«Все новое – хорошо забытое старое». Чего не скажешь про цифровой фотоаппарат, который почти полностью вытеснил пленочный. И не напрасно, поскольку цифровой фотоаппарат имеет множество преимуществ. Соответственно, появились и новые проблемы. Поэтому, в этой статье мы рассмотрим основные поломки и неисправности цифровых фотоаппаратов.
Все неисправности условно можно поделить на физические и технические. К физическим относятся: попадание влаги, песка, перегрев фотокамеры, механические повреждения (удары/падения)
1.Попадание влаги внутрь корпуса. Это одна из основных причин поломки. Причем не обязательно ваш фотоаппарат должен попасть под дождь – достаточно, чтобы он полежал некоторое время в сыром помещении. При этом «подступность» влаги в том, что ее действия незаметно и чем дольше ваш аппарат лежит, тем вероятнее его полный выход из строя. При этом внутри аппарата происходят окислительные процессы электронных элементов.
При этом «подступность» влаги в том, что ее действия незаметно и чем дольше ваш аппарат лежит, тем вероятнее его полный выход из строя. При этом внутри аппарата происходят окислительные процессы электронных элементов.
Если у вас возникли подозрения, что в фотоаппарат попала влага (например, кнопка включения и другие кнопки управления не реагируют), то, в первую очередь, необходимо выключить аппарат, вынуть батарею и поместить его в теплое сухое место. Если официальная гарантия закончилась, то можно самому попробовать во всем разобраться. Для этого понадобится ручные инструменты, в комплект которых входят: набор отверток, пинцет, единица из набора для открывания корпусов, салфетка. Раскрутив корпус, диагностику провести просто – если на внутренних деталях нет отложений солей белого цвета (от попавшей влаги), то можно самому произвести просушку деталей с помощью специальной салфетки. Ни в коем случае нельзя использовать фен, поскольку существует вероятность увеличения площади повреждения.
2.Механические повреждения – очень распространенная причина поломки. Учитывая, что фотоаппарат является переносным устройством, то риск падения или удара очень высок. При этом возможны два вида повреждения: внешние — повреждения корпуса или дисплея и внутренние – повреждения электроники, объектива, в т. ч. механизма зум и других деталей.
В первом случае все просто – незначительные царапины или трещины на корпусе на функциональность не влияют. А от разбитый дисплей. но и его можно заменить. Более детальная информацию по замене дисплея к цифрового фотоаппарата вы можете прочитать в предыдущих статьях.
При повреждении внутренних деталей и механизмов, скорее всего, нужно проводить полную разборку либо самого аппарата (body), либо объектива.
Основные признаки поломки объектива связаны с выходом из строя механизма зум, т. е. невозможно произвести фокусировку.
3.Попадание песка – данная неисправность встречается также очень часто, особенно в летний период. Даже мелкие частицы пыли могут произвести к проблемам. Особенно, это касается объектива фотоаппарата. Основными признаками поломки является утрудненное движения механизма объектива либо полная его блокировка.
Особенно, это касается объектива фотоаппарата. Основными признаками поломки является утрудненное движения механизма объектива либо полная его блокировка.
Для устранения данной неисправности необходимы специальные бумажные шаблоны и жидкость для фиксирования объектива. Если этим способом не удается устранить неисправность, тогда приступаем к разборке фотоаппарата.
4.Нарушение теплового режима. При этом внутренние детали фотоаппарата сильно перегреваются, плавятся — это грозит выходом из строя всего аппарата. В этом случае нужно произвести его разборку, выяснить какие детали вышли из строя и их заменить. Если дела совсем плохи, тогда в сервис-центр, но со своими комплектующими.
К техническим неисправностям относятся: неисправности матрицы, объектива, дисплея и других механизмов, а также сбои в программном обеспечении.
Повреждение дисплея
Данная поломка встречается очень часто. Наиболее подвержены риску цифровые фотоаппараты без защитного стекла. В этих моделях даже при легком надавливании можно повредить дисплей.
В этих моделях даже при легком надавливании можно повредить дисплей.
Основные признаки неисправности ЖК-дисплея: видимые трещины, растекания жидких кристаллов, частичное отображение информации либо ее полное отсутствие. При возникновении такой неисправности Вы самостоятельно можете заменить дисплей на новый. Все необходимые комплектующие и инструменты для ремонта Вы можете найти в нашем интернет-магазине.
Повреждение объектива
Объектив цифрового фотоаппарата очень чувствителен к физическим и механическим воздействиям. Даже незначительные загрязнения на его поверхности могут причинить ему вред. Поломка проявляется чаще всего в плохой фокусировке изображения и плохой работе зума. Выдвинутый объектив, который не реагирует на включение, свидетельствует о проблемах с механизмом привода. В этом случае возможен выход из строя такой хрупкой детали, как шестерни, зубья которых ломаются. При этом попадания даже самых мелких песчинок между шестерни может заблокировать работу механизма зум.
Тогда нужно почистить объектив, используя специальную бумагу и щеточку. Если проблемы не устранены, то приступаем к разборке и замене деталей. И не экономьте на специальных чистящих средствах для объектива. Но и не переусердствуйте, поскольку частая чистка также негативно сказывается на работе механизмов.
Неисправности фотовспышки
Неисправности фотовспышки — один из распространенных видов поломки цифровых фотоаппаратов. Основные признаки неисправности: отснятое изображения слишком темное или светлое, изображение отсутствует вообще.
Если у вас встроенная фотовспышка, то необходимо произвести разборку самого аппарата и прочистить вспышку. Если и это не поможет, то необходима ее замена. В принципе, процедура не сложная и не требует много усилий. В профессиональных фотоаппаратах используются внешние вспышки, которые подключаются к нему через специальный контакт, так называемый, горячий башмак. Именно его поломка может привести к полному отказу вспышки.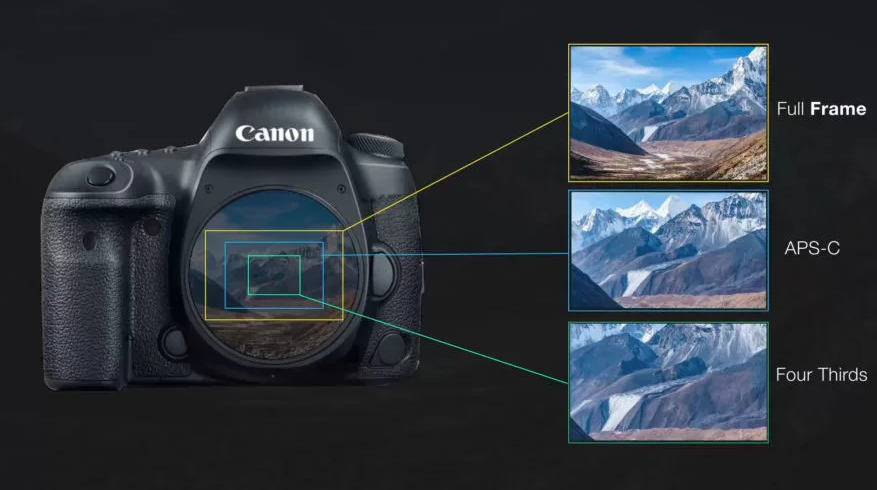
Неисправности интерфейсов фотоаппарата
Поскольку цифровой фотоаппарат удобен тем, что полученные с него снимки можно обрабатывать, то частое использование интерфейсов фотоаппарата просто необходимость – это аудио- и видео выходы, USB разъем и другие разъемы (зависит от модели). Естественно, что и они выходят из строя.
Ремонт интерфейса фотоаппарата в этом случае не составляет труда и заключается в замене расшатавшегося разъема. Для этого вам понадобится набор отверток, который можно приобрести через интернет-магазин.
Конечно, возможны еще некоторые поломки цифровых фотоаппаратов, но они встречаются реже. Если же остановится более детально на моделях, то можно выделить типичные неисправности для каждой модели. Рассмотрим несколько из них:
— Sony DSC-T9: вышел из строя механизм зум, на экран выдает ошибку Е61. Причина и ее решение: заклинило шаговый двигатель механизма зум или повреждены шестерни – необходимо заменить весь механизм.
— CANON ixus 40 (и другие модели): не работает фотовспышка. Причина и ее решение: неисправны элементы микросхемы (25AAJ). Неисправный элемент необходимо заменить на 20AAJ (от схемы вспышки пленочного фотоаппарата).
Причина и ее решение: неисправны элементы микросхемы (25AAJ). Неисправный элемент необходимо заменить на 20AAJ (от схемы вспышки пленочного фотоаппарата).
— Olympus MJV 410: вышла из строя вспышка. Решение проблемы: необходимо припаять разъем от платы вспышки к основной плате.
— NIKON E5000: при включении фотоаппарата объектив выдвигается и стопорится; выключается аппарат только после того, как вынуть и засунуть обратно батарею питания. Проблема и ее решение: проблемы с разъемом CN103 – необходима замена самого разъема.
— Sony DSC-F717: полученное изображение искажено и размазано. Проблема и ее решение: отказ некоторых элементов матрицы – необходимо заменить матрицу.
Как проверить музыку на авторские права на YouTube?
4 объектива для съемки видео на КРОПЕ. Рассмотрим на примере фотоаппаратов Canon.
Как убрать фликер в видео? Убираем мерцание (flicker) в Adobe Premiere Pro с помощью плагина.
Создание видео Love Story.
 Это вам не фото штамповать!
Это вам не фото штамповать! Зачем вам 10 bit 4:2:2 и S-log?
Выгорает ли матрица фотоаппарата со временем?
Выгорает ли матрица фотоаппарата при его долгом использовании?
В этой заметке речь пойдет не о том, что будет с матрицей, если ее направить на полчаса на солнце или несколько секунд светить в нее лазером мощностью 200 милливатт. Очевидно, что в первом случае она очень сильно нагреется, что может привести к ее быстрой деградации и появлению «горячих» пикселей, во втором случае, она выйдет из строя прямо у вас на глазах.
Выгорает ли матрица фотоаппарата?
Вопрос в другом: многие, в том числе и профессиональные фотографы верят в миф, что матрица у зеркалок со временем портится, цвета тускнеют, снижается динамический диапазон (хотя большинство фотографов вообще не знают, что это такое) и что от зеркалки с пробегом 200 000 надо быстрее избавляться, потому что она уже не торт.
Собственно, меня эти заблуждения всегда только забавляли и не особо волновали, но как-то недавно мне моя знакомая (фотограф) вновь озвучила эту страшную болезнь зеркалок — выгорание матрицы. Я поинтересовался, откуда она это знает, на что она сказала, что ей это поведал продавец в фотомагазине (тоже фотограф). И ладно бы это был супермаркет, где продавцы имеют весьма отдаленное представление касательно технических процессов в фотографии. Но это специализированный магазин фототехники (у нас в городе их всего 2, но какой именно я писать не буду). А сказали этой девочке так, потому что она принесла свой Nikon D600, которому уже больше 2-х лет с жалобами, что на картинке появились дефекты изображения:
— А какой пробег у него?
— Ну под 100 000 уже.
— Так а что вы хотели, матрица уже выгорает.
Такого бреда я не ожидал услышать. Дальше знакомым фотографам лучше покинуть эту страницу, потому что некоторые предложения им могут не понравиться)))
Итак, предположим, что вы сделали 200 000 снимков. Среднее время выдержки примерно 1/200 секунды. (Хотя на самом деле, оно еще меньше, т.к. на улице днем снимают на диафрагмах F1.4 — F2.8 и шаттере 1/2000 — 1/8000. Но мы возьмем самый нереальный вариант — фотограф снимает только ночью в клубе со вспышкой)
Среднее время выдержки примерно 1/200 секунды. (Хотя на самом деле, оно еще меньше, т.к. на улице днем снимают на диафрагмах F1.4 — F2.8 и шаттере 1/2000 — 1/8000. Но мы возьмем самый нереальный вариант — фотограф снимает только ночью в клубе со вспышкой)
Итак, сделав 200 000 фото на средней выдержке 1/200 получается, что свет падал на матрицу 1000 секунд. Это меньше 17 минут. Т.е. на основании логики «выгорания» матрицы, включив Live View или снимая видео, ровно через 17 минут ваша матрица начнет выгорать, цвета тускнеть, контрастность падать. Тогда каким образом миллионы людей, и я в том числе, снимают ЧАСАМИ видео на зеркалки в течение нескольких лет и никаких проблем с матрицей не происходит? На современных фотоаппаратах она даже не перегревается от непрерывной съемки в течение многих часов!
Вот вам и ответ: матрица не «выгорает» от долгого использования. Если у вас дефекты изображения после длительного общения с фотоаппаратом — то вам просто нужно сдать матрицу на чистку.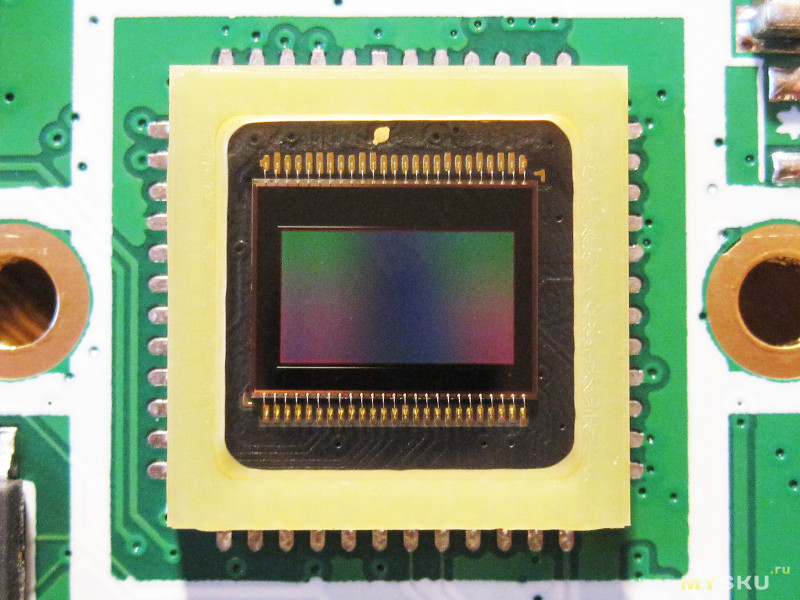
А теперь, собственно, хочу перейти к главной части этой заметки: почему люди верят в такую чушь? И не простые люди, а фотографы, профессиональные фотографы. Итак, для начала, следует задать вопрос: почему современные фотографы вообще не шарят в том, как работает фотоаппарат на котором они зарабатывают деньги? Почему любой видеограф знает про DSLR в 10 раз больше фотографа? Я не хочу тут разводить писанину на тему, что сложнее — делать видео или снимать фото, это и так очевидно.
Но вот почему любой человек, который освоил режим «M» на фотоаппарате, автоматически причисляется к рангу профессиональных фотографов и считает, что ему больше знать ничего не нужно? Я в 11 лет уже снимал на отцовский «Зенит» и знал, что такое экспонометр. Получается я тогда уже был профессиональным фотографом.
Итак, сколько фотографов из числа ваших знакомых знает ответы на простейшие вопросы о фототехнике:
— Что такое динамический диапазон, в чем он измеряется и как зависит от плотности пикселей на матрице?
— Что такое муар и алиасинг и зачем в некоторых фотоаппаратах стоит оптический фильтр низких частот (Canon 5Ds, Nikon D800), а в некоторых не стоит (Canon 5Ds R, Nikon D800E) и как он влияет на изображение?
— Что такое бандинг и чем 12-битный RAW отличается от 14-битного?
— Что такое Rolling Shutter?
— Кто-то знает, что такое «Native ISO» и насколько радикально зависит динамический диапазон фото от значения светочувствительности?
— Что значит, что стабилизатор объектива компенсирует 4 стопа экспозиции?
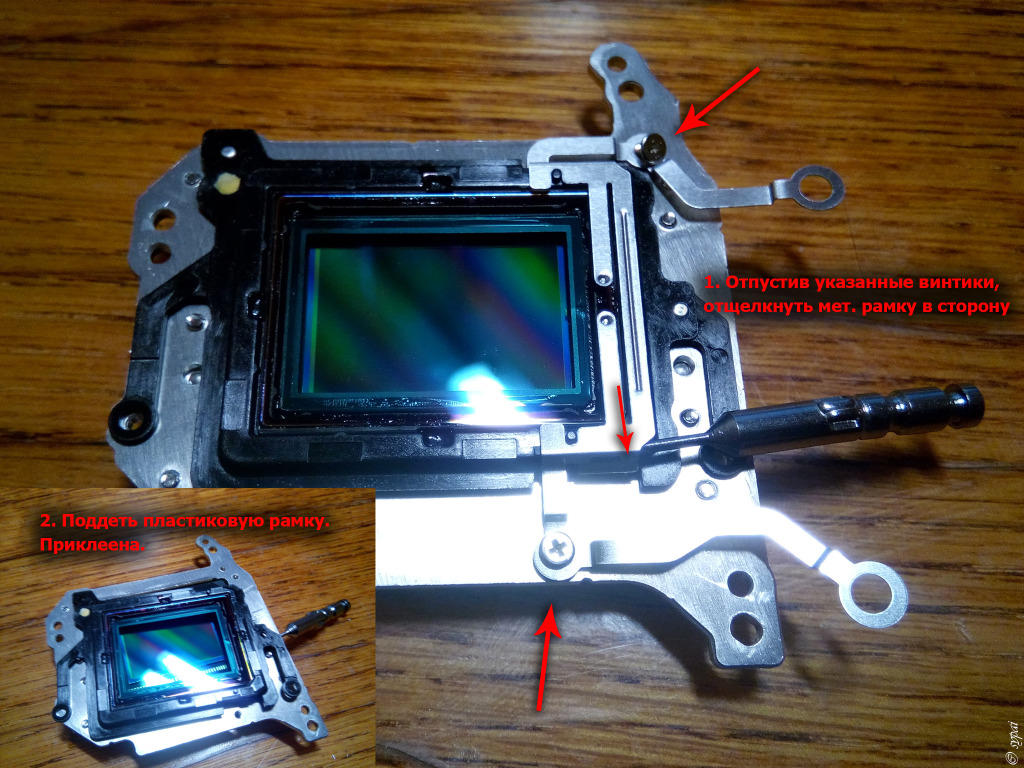
— Много ли владельцев Nikon знают, что могут поменять фокусировочный экран и понимают ли они, что это вообще такое?
— Почему в режиме Live View не может работать обычная система автофокуса и нужно ставить дополнительные датчики фокуса прямо на матрицу?
Это абсолютно несложные вопросы, ответы на которые знает практически любой видеограф. Но не знает практически любой фотограф).
Но не знает практически любой фотограф).
Заметьте, здесь нет вопросов про EOS iTR и EOS iSA, нет и о том, чем матрицы с обратной засветкой засветкой лучше обычных КМОП, никто даже не просит расшифровать этот КМОП (CMOS). Нет вопросов про систему экспозамера из 150 000 RGB датчиков, которые объединяется в 252-зонный TTL экспозамер, и чем крестообразный датчик автофокуса лучше обычного, и какие из них могут работать с диафрагмами меньше F2.8, а какие не могут?
Разумеется, чтобы снимать фотографии, можно всего этого и не знать. И продолжать считать, что матрица со временем выгорает. Более того, если человек зарабатывает только фотографией — то он уже автоматически является «профессионалом», потому что это, как не крути, его профессия. Кто-то может сказать, что для того, чтобы делать крутые фотки, все это можно и не знать. Это правда, миллиарды людей на планете вообще в школе не учились и как-то же живут.
Но вот вам один пример: зависимость динамического диапазона Canon 5D Mark III и Nikon D800 от значения ISO.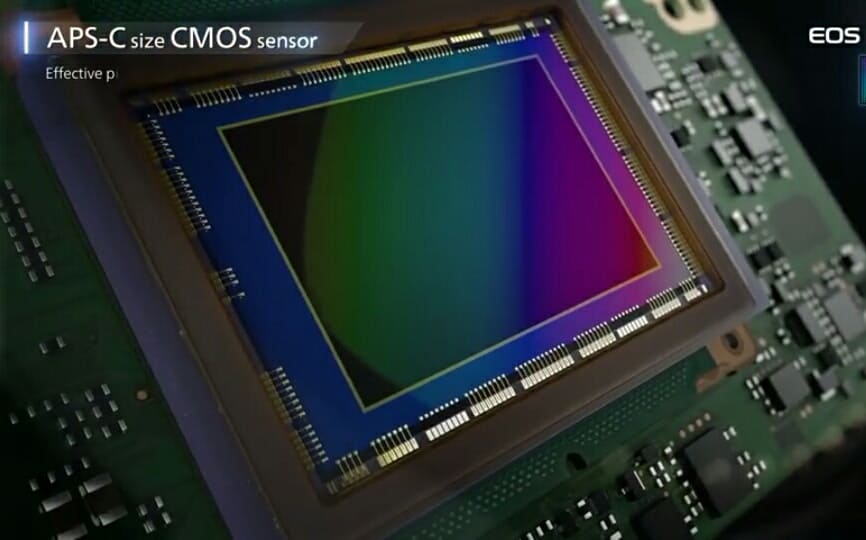
Теперь вам понятно, почему у Nikon из RAW тени тянутся на «ура», а у Canon это выглядит как грязная каша? Все дело в дополнительных 2-х стопах динамического диапазона. Наверное, вы также замечали, что на больших ISO картинка выглядит более плоской? Теперь вы, хотя бы, будете знать почему. А ведь это непосредственно влияет на качество картинки.
Так, может, лучше немного разобраться, как, все-таки, работает фотоаппарат?
ПЗС-матрица (часть первая) « ФОТОУВЛЕЧЕНИЕ
Технику, как и людей, принято «встречать по одёжке» – по одному из параметров, принятому в качестве ключевого. Первое впечатление о фотоаппарате принято составлять по его объективу, и оценка эта по большей части будет справедлива даже после её проверки самым тщательным и комплексным тестированием камеры. Однако от характеристик ПЗС-матрицы зависит не только качество регистрации сгенерированного объективом кадра, но и сам процесс формирования изображения в оптическом тракте фотоаппарата.
Общеизвестно, что качество работы любого оптического прибора зависит от его объектива. Однако при использовании какого бы то ни было регистратора изображения, будь то плёнка кинокамеры, электронно-оптический преобразователь прибора ночного видения либо ПЗС-матрица цифрового фотоаппарата, не менее важную роль играют параметры этого устройства. При всех различиях между принципами действия регистраторов существует ряд характеристик, совершенно одинаковым образом влияющих на процесс съёмки. Среди них можно выделить габариты регистратора изображения, его чувствительность и динамический диапазон, точность цветопередачи, минимальный возможный интервал между экспозициями и многое другое. По общепринятому мнению, наибольшее значение для процесса съёмки имеют первые три параметра, причём в ПЗС-матрице все они неразрывно связаны друг с другом.
Size Does Matter
Название этой главы – «Размер имеет значение» – совершенно справедливо для регистратора изображения любого типа. В середине прошлого века любой из фотографов был вынужден искать компромиссное решение, выбирая между разными форматами фотоматериалов.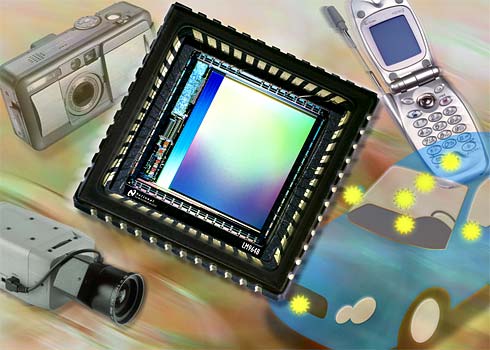 Среднеформатные плёнки (размер кадра 6×4,5; 6×6; 6×7 и 6×9 см) и крупноформатные пластинки (9×12; 13×18 и 18×24 см) считались «выбором профессионала», так как обеспечивали широкий динамический диапазон (интервал между точно воспроизводимыми самым тёмным и самым светлым тоном формируемого объективом изображения) и высокую чёткость снимка. При этом малоформатная, то есть привычная всем 35-миллиметровая пленка, долгое время считалась пригодной только для любительской фотографии, а её профессиональное применение ограничивалось репортажной съёмкой. Однако со временем зернистость малоформатной плёнки становилась все меньше и меньше, обеспечивая постепенный рост разрешения снимка, одновременно расширялся динамический диапазон 35-миллиметрового кадра.
Среднеформатные плёнки (размер кадра 6×4,5; 6×6; 6×7 и 6×9 см) и крупноформатные пластинки (9×12; 13×18 и 18×24 см) считались «выбором профессионала», так как обеспечивали широкий динамический диапазон (интервал между точно воспроизводимыми самым тёмным и самым светлым тоном формируемого объективом изображения) и высокую чёткость снимка. При этом малоформатная, то есть привычная всем 35-миллиметровая пленка, долгое время считалась пригодной только для любительской фотографии, а её профессиональное применение ограничивалось репортажной съёмкой. Однако со временем зернистость малоформатной плёнки становилась все меньше и меньше, обеспечивая постепенный рост разрешения снимка, одновременно расширялся динамический диапазон 35-миллиметрового кадра.
После того как разрешение 35-миллиметровой плёнки перешло определённый порог, малоформатная фототехника стала стремительно вытеснять среднеформатные камеры. Причиной тому стали не только заметно меньшие габариты 35-миллиметровых фотоаппаратов и сравнительная простота их эксплуатации, но и сопутствующая выгода от перехода на меньший размер кадра. Преимущества заключались, во-первых, в возможности сократить фокусное расстояние оптической системы (и уменьшить размеры и вес объектива), при этом величина объекта в кадре не изменялась. Во-вторых, при уменьшении габаритов кадра возрастает глубина резкости объектива (отрезок пространства перед объективом – все объекты, попавшие в этот отрезок, будут отображены на плоскости регистратора изображения с достаточной резкостью). Возросшая глубина резкости, в свою очередь, позволяет компенсировать ошибки фокусировки либо «приоткрыть» при съёмке диафрагму, в результате можно использовать более «короткую» выдержку и заметно снизить шанс «сдергивания» снимка. В-третьих, размер кадра прямо пропорционален минимальной дистанции съёмки, таким образом, малоформатные камеры имеют преимущество при макросъёмке (фотографировании мелких объектов со сверхмалой дистанции, от 50 см и менее).
Преимущества заключались, во-первых, в возможности сократить фокусное расстояние оптической системы (и уменьшить размеры и вес объектива), при этом величина объекта в кадре не изменялась. Во-вторых, при уменьшении габаритов кадра возрастает глубина резкости объектива (отрезок пространства перед объективом – все объекты, попавшие в этот отрезок, будут отображены на плоскости регистратора изображения с достаточной резкостью). Возросшая глубина резкости, в свою очередь, позволяет компенсировать ошибки фокусировки либо «приоткрыть» при съёмке диафрагму, в результате можно использовать более «короткую» выдержку и заметно снизить шанс «сдергивания» снимка. В-третьих, размер кадра прямо пропорционален минимальной дистанции съёмки, таким образом, малоформатные камеры имеют преимущество при макросъёмке (фотографировании мелких объектов со сверхмалой дистанции, от 50 см и менее).
Примерно так же обстоят дела с цифровой фототехникой, только вот габариты основных типов регистраторов изображения значительно меньше. В частности, ПЗС-матрицы, по размеру соответствующие кадру среднеформатной плёнки, тоже используются в цифровой технике, однако высокая стоимость обусловила слабую распространённость данного типа сенсоров. Фактически сегмент рынка цифровой техники «среднего формата» составляет лишь несколько процентов от той доли, которая приходилась в своё время на плёночные среднеформатные камеры, а основной парк цифровых фотоаппаратов состоит из профессиональных и любительских моделей.
В частности, ПЗС-матрицы, по размеру соответствующие кадру среднеформатной плёнки, тоже используются в цифровой технике, однако высокая стоимость обусловила слабую распространённость данного типа сенсоров. Фактически сегмент рынка цифровой техники «среднего формата» составляет лишь несколько процентов от той доли, которая приходилась в своё время на плёночные среднеформатные камеры, а основной парк цифровых фотоаппаратов состоит из профессиональных и любительских моделей.
Первые образцы профессиональных камер представляли собой 35-миллиметровые «зеркалки», у которых столик для плёнки был заменён ПЗС-матрицей. Профессиональные модели последних лет заметно отличаются от своих плёночных «собратьев», однако в целом их конструкция содержит ряд объединяющих черт:
байонетный разъём для сменных объективов;
подъёмное зеркало, направляющее в окуляр видоискателя изображение, сформированное объективом;
ПЗС-матрица размером от 36×24 до 18×13,5 мм.
Любительские модели появились одновременно с профессиональными камерами, и их основные отличительные особенности тоже сохранились неизменными:
постоянный объектив;
ПЗС-матрица размером от 8,6×6,5 до 5,2×3,9 мм.
| Оттенками синего отмечены ПЗС-матрицы профессиональных камер, оттенками красного – сенсоры любительской техники |
На иллюстрации со сравнительными габаритами ПЗС-матриц использован термин «формфактор», требующий дополнительного объяснения. Матрицы любительских фотоаппаратов с момента их появления принято характеризовать числом, указывающим на диагональ сенсора в долях дюйма (1/2,5, 1/1,8, 2/3 и так далее). Данное число, именуемое формфактором, не соответствует реальной диагонали матрицы, составляющей примерно 2/3 от формфактора. Например, ПЗС-матрица с формфактором 1/1,8 имеет диагональ 9 мм. Несовпадение это вызвано тем, что термин формфактор, описывающий размер регистрирующего элемента, перекочевал в цифровую фотографию из телетехники. В телекамерах для регистрации изображения использовались электронно-лучевые трубки, у которых из всей фронтальной площади колбы использовалась прямоугольная область с соотношением сторон 4:3, диагональ которой составляла примерно 2/3 от диаметра колбы. Именно этот виртуальный «диаметр колбы» и используется в качестве параметра, описывающего физический размер ПЗС-матрицы любительских фотоаппаратов.
Именно этот виртуальный «диаметр колбы» и используется в качестве параметра, описывающего физический размер ПЗС-матрицы любительских фотоаппаратов.
Как видно из приведённых данных, пропорция между габаритами сенсоров, используемых в профессиональной и любительской технике, примерно соответствует соотношению кадров среднеформатной и 35-миллиметровой плёнки. В свою очередь, процентное отношение рынков профессиональных и любительских цифровых камер практически такое же, какое было у сегментов среднеформатной и 35-миллиметровой техники, ну а плюсы малогабаритных регистраторов изображения в цифровой фототехнике выражены даже более наглядно, чем в классической фотографии:
были разработаны сверхкомпактные любительские модели с объективом «перископной» схемы, полностью спрятанным внутри корпуса. Благодаря такому решению удалось создать пылевлагозащищённые камеры, выдерживающие получасовое пребывание под водой на глубине полтора метра;
у «дальнобойных» любительских камер вариообъективы с фантастическим диапазоном фокусного расстояния (с кратностью 14х) и системой оптической стабилизации по своим габаритам не превышают 35-миллиметровую оптику стандартного диапазона (с кратностью 3х). В результате любознательный турист вместо крупногабаритного кофра обходится компактным чехлом;
В результате любознательный турист вместо крупногабаритного кофра обходится компактным чехлом;
при макросъёмке минимальная дистанция фотографирования большинства любительских моделей не превышает нескольких сантиметров. В сочетании с высоким разрешением ПЗС-матриц это обеспечивает высочайшую детализацию самых миниатюрных объектов съёмки.
Однако плата за все эти «удовольствия» чрезвычайно высока.
Отличие «химии» от «физики»
В отличие от фотоплёнки, у которой чёткость регистрируемого изображения зависит только от технологических возможностей наносящего светочувствительную эмульсию оборудования, ПЗС-матрица имеет значительно больше ограничений по росту разрешения. Вызвано это тем, что регистрирующие свет элементы матрицы, именуемые пикселями, работают не так, как светочувствительный слой плёнки. Фотоны, падающие на поверхность плёнки, вызывают модификацию химического состава светочувствительных зёрен без каких-либо дополнительных устройств, а изменение прозрачности и цвета с эмульсии обеспечивается дальнейшей обработкой специальными реактивами.
В пикселе преобразование света в электрический заряд невозможно без так называемой обвязки – совокупности электронных компонентов, обеспечивающих хранение и считывание накопленного пикселем заряда, сброс избыточного заряда, а также ряд других необходимых функций. В зависимости от типа ПЗС-матрицы на долю обвязки может приходиться от 30 до 70% всей площади пикселя. Из-за этого сокращается как светочувствительная область пикселя, так и его способность аккумулировать электрический заряд. Первое приводит к уменьшению чувствительности (восприимчивости регистратора изображения к световому излучению), второе – к сужению динамического диапазона. Разумеется, совершенствование технологий позволяет компенсировать потери чувствительности и динамического диапазона, обусловленные обвязкой. Однако при увеличении разрешения матрицы с сохранением её габаритов площадь каждого пикселя уменьшается – с соответствующими для чувствительности и динамического диапазона последствиями. Если при этом ещё и размер обвязки остаётся прежним, то доля светочувствительной области пикселя уменьшается ещё сильнее, усугубляя негативный эффект.
| Матрица с более высоким разрешением (справа) отличается меньшей относительной площадью светочувствительных областей пикселей |
Именно поэтому каждый скачок разрешения ПЗС-матриц любительских фотокамер сопровождается упорной борьбой разработчиков за сохранение чувствительности и динамического диапазона. В профессиональной фототехнике размер каждого пикселя в несколько раз больше, поэтому динамический диапазон и чувствительность этих камер выгодно отличает их от любительских моделей. Это обстоятельство обусловило высокую популярность профессиональных моделей начального уровня – предложенные рынку несколько лет назад камеры ценой до тысячи долларов с самого своего появления пользовались повышенным спросом, а постоянно снижающаяся цена на эти фотоаппараты привела к исчезновению сразу нескольких типов любительской фототехники.
«Меньше» — не всегда «хуже»
В 2002 году появилась спецификация стандарта Four Thirds, использующего ПЗС-матрицу в два раза меньшей площади, чем 35-миллиметровый кадр, а также соответствующих габаритов сменную оптику. Согласно утверждениям разработчиков стандарта, такое решение должно было обеспечить объективам Four Thirds уменьшение массогабаритных характеристик в два раза. За прошедшее время появился достаточно богатый ассортимент оптики данного стандарта, поэтому можно констатировать, что предположение создателей Four Thirds полностью оправдалось.
Согласно утверждениям разработчиков стандарта, такое решение должно было обеспечить объективам Four Thirds уменьшение массогабаритных характеристик в два раза. За прошедшее время появился достаточно богатый ассортимент оптики данного стандарта, поэтому можно констатировать, что предположение создателей Four Thirds полностью оправдалось.
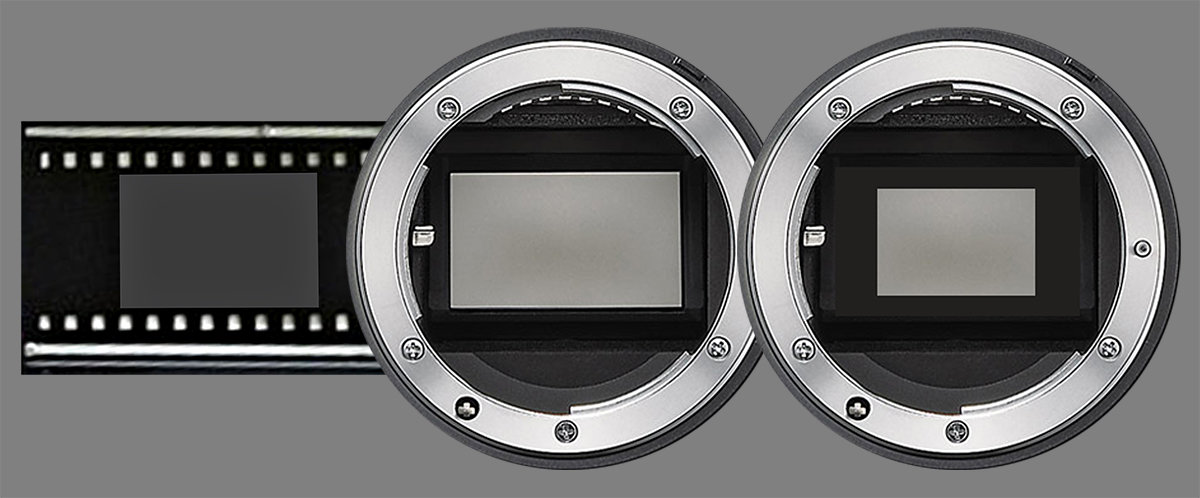
Тем не менее в стандарте Four Thirds технику производят всего две фирмы – Olympus и Panasonic. Все остальные производители при разработке цифровых «зеркалок» ориентируются на 35-миллиметровую оптику, полагая при этом, что заметно более широкий ассортимент «классических» объективов должен компенсировать проигрыш по массогабаритным характеристикам. Однако большинство ПЗС-матриц, используемых в профессиональной технике, меньше стандартного кадра 35-миллиметровой плёнки. Практически все сенсоры выполнены в габаритах кадра плёнки APS (Advanced Photo System) – подававшего большие надежды, но так и не принятого рынком стандарта. Размер этого кадра составляет порядка 25,1×16,7 мм, при этом используемые некоторыми производителями сенсоры могут быть чуть меньше либо чуть больше. Применение 35-миллиметровой оптики приводит к тому, что часть формируемого объективом изображения оказывается в буквальном смысле «за кадром». В итоге снимки получаются такими, как если бы их делали объективом с большей длиной фокусного расстояния. Таким образом, вариообъектив 28-50 мм, используемый в профессиональной камере с ПЗС-матрицей, в полтора раза меньшей 35-миллиметрового кадра, приобретает диапазон фокусного расстояния 42-75 мм.
Применение 35-миллиметровой оптики приводит к тому, что часть формируемого объективом изображения оказывается в буквальном смысле «за кадром». В итоге снимки получаются такими, как если бы их делали объективом с большей длиной фокусного расстояния. Таким образом, вариообъектив 28-50 мм, используемый в профессиональной камере с ПЗС-матрицей, в полтора раза меньшей 35-миллиметрового кадра, приобретает диапазон фокусного расстояния 42-75 мм.
| При регистрации центральной области кадра получается эффект длиннофокусного объектива |
Условное «увеличение» фокусного расстояния зависит от размеров матрицы и выражается с помощью величины, именуемой коэффициентом фокусного расстояния (в англоязычной литературе используется термин crop-factor). В ранних профессиональных камерах, оснащённых совсем уж маленькими матрицами, этот коэффициент достигал 2,5. При использовании ПЗС-матрицы «формата APS» коэффициент равен 1,5. Большинство профессиональных камер фирмы Canon оснащены сенсором чуть меньших габаритов (22,2×14,8 мм), поэтому имеют коэффициент 1,6, однако среди моделей высшего уровня имеется серия с матрицей стандарта APS-H, то есть APS-High Definition. Размер этого сенсора составляет 28,7×19,1 мм, а коэффициент фокусного расстояния равен 1,3.
Большинство профессиональных камер фирмы Canon оснащены сенсором чуть меньших габаритов (22,2×14,8 мм), поэтому имеют коэффициент 1,6, однако среди моделей высшего уровня имеется серия с матрицей стандарта APS-H, то есть APS-High Definition. Размер этого сенсора составляет 28,7×19,1 мм, а коэффициент фокусного расстояния равен 1,3.
То, что часть светового изображения остаётся «за кадром», имеет как плюсы, так и минусы. Например, уменьшается угловое поле объектива, поэтому тяжелее вести широкоугольную съёмку. Следует учесть также, что короткофокусная оптика стоит немалых денег – и чем меньше фокусное расстояние, тем объектив дороже. Однако объективы для телесъёмки тоже недёшевы, и чем больше их фокусное расстояние, тем, как правило, меньше максимальное относительное отверстие и светосила. При коэффициенте фокусного расстояния 1,5 недорогой «телевик» 200 мм f/4,5 превращается в 300-миллиметровый объектив. В то же время у большинства «настоящих» 300-миллиметровых «телевиков» диафрагму можно раскрыть максимум на f/5,6, тогда как у «конвертированного» 200-миллиметрового объектива она остаётся прежней – f/4,5.
Практически каждый объектив в той или иной степени страдает от геометрических аберраций, искажающих очертания объектов съёмки, причём особенно сильно их присутствие выражено у краёв снимка. Если коэффициент фокусного расстояния больше единицы, то при регистрации ПЗС-матрицей изображения, сформированного объективом, его краевые области в снимок не попадут.
Следует отметить, что некоторые производители всё-таки выпускают оптику, адаптированную к сенсорам APS-габаритов. Например, фирма Nikon, используя свои наработки по производству объективов для APS-камер серии Pronea, анонсировала в 2002 году линейку оптики Nikkor DX, в которой линзы изначально подбирались с тем, чтобы световое изображение было в полтора раза меньше кадра 35-миллиметровой плёнки. Разумеется, в 35-миллиметровой «зеркалке» эти объективы использовать нельзя, но за счёт меньшего диаметра линз удалось снизить массогабариты изделий, кроме того, снизилась стоимость оптики, а это во все времена и для любого товара является едва ли не главным аргументом. Годом позже Canon вышла на рынок с серией EF-S. Отличие этих объективов от линейки EF заключается в более глубоком расположении их выходной линзы внутри корпуса фотоаппарата. Именно поэтому в названии присутствует буква S (short – «короткий»), ведь фокусное расстояние объектива при этом укорачивается, а изображение, формируемое оптикой, уменьшается. Объективы серии EF-S получаются дешевле и легче, чем обычная оптика, однако их можно использовать только в камерах Canon с коэффициентом фокусного расстояния не менее 1,6.
Годом позже Canon вышла на рынок с серией EF-S. Отличие этих объективов от линейки EF заключается в более глубоком расположении их выходной линзы внутри корпуса фотоаппарата. Именно поэтому в названии присутствует буква S (short – «короткий»), ведь фокусное расстояние объектива при этом укорачивается, а изображение, формируемое оптикой, уменьшается. Объективы серии EF-S получаются дешевле и легче, чем обычная оптика, однако их можно использовать только в камерах Canon с коэффициентом фокусного расстояния не менее 1,6.
Марин Милчев
Ваша оценка:
Понравилось это:
Нравится Загрузка…
функций одной камеры 3D. Внутренняя матрица, внешняя матрица… | от Hugegene | MLearning.ai
Внешняя и внутренняя матрица, однородные координаты, гомография, картирование в обратной перспективе
Это одна из серии историй, объясняющих использование одной камеры для измерения расстояния. Полная серия историй приведена ниже в рекомендуемом порядке чтения:
- 3D-функции с одной камерой
- Понимание конструкции «Точки схода» и «Горизонта 9»0008
- Восстановление внешней матрицы вращения с помощью точек схода
Лидарная технология, стереовидение для создания облаков точек часто используются для трехмерной локализации и понимания сцены. Однако знаете ли вы, что одну камеру можно также использовать для трехмерной локализации и понимания сцены? Сначала мы должны понять основы того, как камера превращает 3D-сцену в 2D-изображение. Камера превращает 3D-объект-сцену в 2D-изображение способом, описанным на следующей диаграмме, когда мы рассматриваем объект-сцену в системе координат камеры, где положением датчика камеры является начало координат (0,0,0), а x , y, z оси системы координат камеры, как показано.
Однако знаете ли вы, что одну камеру можно также использовать для трехмерной локализации и понимания сцены? Сначала мы должны понять основы того, как камера превращает 3D-сцену в 2D-изображение. Камера превращает 3D-объект-сцену в 2D-изображение способом, описанным на следующей диаграмме, когда мы рассматриваем объект-сцену в системе координат камеры, где положением датчика камеры является начало координат (0,0,0), а x , y, z оси системы координат камеры, как показано.
С помощью приведенной выше диаграммы можно понять, что, зная положение x,y,z в системе координат камеры и фокусные расстояния (fx, fy) камеры, мы можем вычислить соответствующий пиксель u,v на изображении с изображенные формулы. Формулы — это просто масштабирование подобных формул треугольников из средней школы. Фокусные расстояния являются уникальными постоянными параметрами каждой камеры, задаются при их изготовлении и могут быть определены при калибровке камеры (https://docs.opencv.org/4.x/dc/dbb/tutorial_py_dication. html). Однако можно также понять, что, зная пиксель u, v в изображении и фокусные расстояния, трудно восстановить положение x, y, z в системе координат камеры, в основном z, направление глубины объекта по отношению к камере. происхождения, не известно. Это сложная задача трехмерной реконструкции объекта-сцены на основе двумерных изображений.
html). Однако можно также понять, что, зная пиксель u, v в изображении и фокусные расстояния, трудно восстановить положение x, y, z в системе координат камеры, в основном z, направление глубины объекта по отношению к камере. происхождения, не известно. Это сложная задача трехмерной реконструкции объекта-сцены на основе двумерных изображений.
Отношение, показанное на приведенной выше диаграмме, более полно и функционально определяется формулой матрицы полной камеры или матрицы камеры, P , которые используются промышленностью и исследователями для управления изображениями. P состоит из внешней матрицы [R|t] и внутренней матрицы K . Непосредственно ниже объясняется внешняя матрица и , за которой следует внутренняя матрица и P .
Выберите опорную точку в трехмерном мире, отметьте ее как начало координат и задайте ось мировой системы координат. Поверните и переведите мировую систему координат в систему координат камеры. Трехмерная точка, определенная в мировой системе координат, теперь будет находиться в системе координат камеры.
Трехмерная точка, определенная в мировой системе координат, теперь будет находиться в системе координат камеры.
Обратите внимание, что by [x,y, z, 1] упрощает скалярное произведение с [R|t] для получения координат камеры точки в трехмерном пространстве. R относится к матрице поворота, а t относится к матрице переноса, которая сначала поворачивает точку в соответствии с ориентацией системы координат камеры и переводит ее в систему координат камеры. [R|t] также называется внешней матрицей камеры , которая вращает и переводит объект в указанной мировой системе координат в систему координат камеры.
[x, y, z, 1] и [Xc, Yc, Zc] называются однородными координатами, и такое преобразование матрицы камеры является проективным преобразованием, описываемым однородными координатами. Трехмерная мировая точка представлена четырьмя однородными координатами с последней координатой 1. Двумерная точка на изображении представлена тремя однородными координатами с последней координатой глубины (ось Z) точки. Чтобы лучше понять однородные координаты, мы будем использовать точку двумерного изображения, представленную тремя однородными координатами, в качестве примера, поскольку трехмерное изображение может быть изображено на чертежах. См. схему ниже. Точку на изображении (0, 200) можно рассматривать как луч от начала координат как (0, 200, 1). Луч можно продлить по оси Z, чтобы достичь объекта в точке (0, 200*Zc, Zc).
Чтобы лучше понять однородные координаты, мы будем использовать точку двумерного изображения, представленную тремя однородными координатами, в качестве примера, поскольку трехмерное изображение может быть изображено на чертежах. См. схему ниже. Точку на изображении (0, 200) можно рассматривать как луч от начала координат как (0, 200, 1). Луч можно продлить по оси Z, чтобы достичь объекта в точке (0, 200*Zc, Zc).
Точка, заданная в системе координат камеры, может быть спроецирована на плоскость изображения с помощью K , внутренней матрицы камеры . K — это матрица, включающая fx, fy, которая масштабирует значения x и y системы координат камеры до значений u и v плоскости изображения. Кроме того, K также включает sx и sy, которые переводят начало изображения из центра в левый верхний угол изображения.
Полная матрица камеры , P , который принимает точку мировых координат и проецирует ее на плоскость изображения с полной формулой на изображении ниже.
Так как K является матрицей 3×3, а [R|t] является матрицей 3×4, P является матрицей 3×4. Поскольку P не является квадратной матрицей, ее обратная матрица невозможна, и, следовательно, это снова показывает сложность обратного вычисления мировых координат x, y, z с u, v пикселями изображения камеры. Даже если P inverse возможен, координата изображения содержит только u и v, отсутствие Zc, глубины изображения, сделает невозможным обратное вычисление (P inverse)(Zc)([u v 1]).
Однако существует метод под названием гомография для восстановления трехмерного положения из пикселей изображения, когда направление z в мировой системе координат игнорируется. Другими словами, мы рассматриваем только плоскость в трехмерном мире. Если направление z в мировой координате игнорируется, матрица камеры 4×3 , P может быть уменьшена до матрицы гомографии 3×3 , H.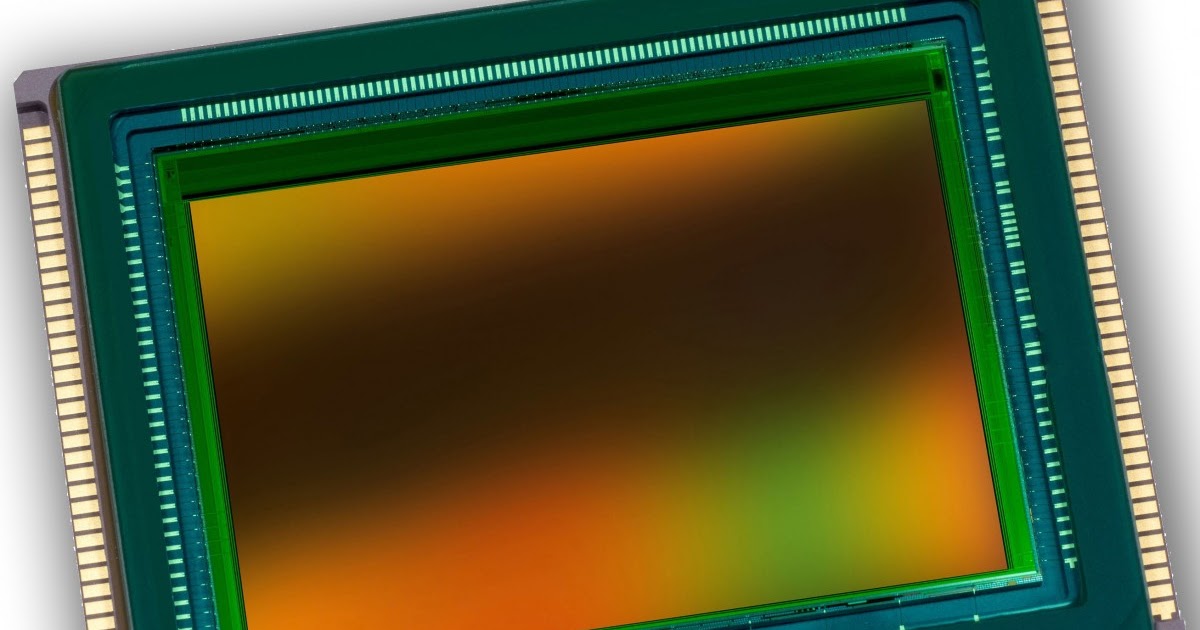 Квадратная матрица может иметь свою обратную, H- 1 , который может отображать пиксель u, v изображения в координату x, y, 0 в мировой системе координат, как показано ниже.
Квадратная матрица может иметь свою обратную, H- 1 , который может отображать пиксель u, v изображения в координату x, y, 0 в мировой системе координат, как показано ниже.
Фактически, сопоставление изображения с изображением также возможно, поскольку вы можете определить первое изображение в мировых координатах с z=0. Такой прием часто используется в телетрансляциях соревнований по плаванию, когда изображение национальных флагов трансформируется в дорожки в бассейне.
Расстояние искажено в перспективном виде, так как фиксированное расстояние ближе к камере кажется больше, а такое же расстояние дальше от камеры кажется меньше. Однако расстояние в ортогональном виде не искажается и остается неизменным независимо от того, где оно находится. Следовательно, исследователи используют технику под названием Inverse Perspective Mapping для преобразования изображения из вида в перспективе в ортогональный вид сверху вниз для измерения расстояния (https://arxiv. org/pdf/1905.02231.pdf). Зная внутреннюю матрицу и внешнюю матрицу , Отображение обратной перспективы , нетрудно понять.
org/pdf/1905.02231.pdf). Зная внутреннюю матрицу и внешнюю матрицу , Отображение обратной перспективы , нетрудно понять.
Учитывая изображение, снятое камерой, расположенной под углом, сначала получите координаты камеры, затем поверните ось камеры вокруг координат камеры по оси x так, чтобы она смотрела перпендикулярно земле, и повторно спроецируйте повернутые координаты камеры. на плоскость изображения.
Обратите внимание, что R выше отличается от матрицы поворота R в предыдущих разделах. Я, вероятно, расскажу о матрице вращения в следующем рассказе, если у меня будет время. Спасибо за чтение!
Как стать писателем на Mlearning.ai
medium.com
рендеринг — матрица камеры 3×4 из камеры блендера
Для этого я написал функцию get_3x4_RT_matrix_from_blender, указанную ниже.
импорт в барах в год импортировать bpy_extras из mathutils импортировать матрицу из импорта mathutils Вектор #------------------------------------------------- -------------- # 3x4 P матрица из камеры Blender #------------------------------------------------- -------------- # Создание внутренних параметров камеры из данных камеры Blender # # См.примечания по этому поводу в # blender.stackexchange.com/questions/15102/what-is-blenders-camera-projection-matrix-model def get_dication_matrix_K_from_blender (camd): f_in_mm = камера.объектив сцена = bpy.context.scene разрешение_x_in_px = сцена.рендер.разрешение_x разрешение_y_in_px = сцена.рендер.разрешение_у масштаб = сцена.рендер.разрешение_процента/100 Sensor_width_in_mm = camd.sensor_width Sensor_height_in_mm = camd.sensor_height pixel_aspect_ratio = scene.render.pixel_aspect_x / scene.render.pixel_aspect_y если (camd.sensor_fit == 'ВЕРТИКАЛЬНО'): # высота датчика фиксированная (посадка датчика горизонтальная), # ширина сенсора эффективно изменяется с соотношением сторон пикселя s_u = разрешение_x_в_пикселях * масштаб / ширина_сенсора_в_мм / соотношение сторон_пикселя s_v = разрешение_y_in_px * масштаб / высота датчика_in_mm еще: # 'ГОРИЗОНТАЛЬНО' и 'АВТО' # ширина сенсора фиксированная (посадка сенсора горизонтальная), # высота датчика эффективно изменяется с соотношением сторон пикселя pixel_aspect_ratio = scene.
render.pixel_aspect_x / scene.render.pixel_aspect_y s_u = разрешение_x_in_px * масштаб / ширина датчика_in_mm s_v = разрешение_y_в_пикселях * масштаб * соотношение сторон_пикселя / высота_сенсора_в_мм # Параметры собственной калибровочной матрицы K alpha_u = f_in_mm * s_u alpha_v = f_in_mm * s_v u_0 = разрешение_x_in_px * масштаб / 2 v_0 = разрешение_y_в_пикселях * масштаб / 2 skew = 0 # использовать только прямоугольные пиксели К = Матрица ( ((alpha_u, перекос, u_0), ( 0 , альфа_v, v_0), ( 0 , 0 , 1 ))) вернуть К # Возвращает матрицы вращения и перемещения камеры из Blender. # # Задействованы 3 системы координат: # 1. Мировые координаты: "world" # - правша # 2. Координаты камеры Blender: "bcam" # - x горизонтальный # - у вверх # - правосторонний: отрицательное направление взгляда по оси z # 3. Нужные координаты камеры компьютерного зрения: "cv" # - x горизонтальный # - y находится внизу (чтобы выровнять фактические координаты пикселя # используется в цифровых изображениях) # - правосторонний: положительное направление взгляда по оси z def get_3x4_RT_matrix_from_blender (камера): # bcam обозначает камеру блендера R_bcam2cv = Матрица( ((1, 0, 0), (0, -1, 0), (0, 0, -1))) # Транспонировать, так как вращение - это вращение объекта, # и нам нужно вращение координат # R_world2bcam = cam.
rotation_euler.to_matrix().transposed() # T_world2bcam = -1*R_world2bcam * местоположение # # Вместо этого используйте matrix_world для учета всех ограничений местоположение, вращение = cam.matrix_world.decompose () [0: 2] R_world2bcam = вращение.в_матрицу().транспонированное() # Преобразование положения камеры в вектор перемещения, используемый при изменении координат # T_world2bcam = -1*R_world2bcam*cam.location # Используйте расположение из matrix_world для учета ограничений: T_world2bcam = -1*R_world2bcam @ местоположение # Построить матрицу преобразования координат из мира в камеру компьютерного зрения # ПРИМЕЧАНИЕ. Используйте здесь * вместо @ для более старых версий Blender. # TODO: определить версию Blender R_world2cv = R_bcam2cv@R_world2bcam T_world2cv = R_bcam2cv@T_world2bcam # помещаем в матрицу 3x4 РТ = Матрица(( R_world2cv[0][:] + (T_world2cv[0],), R_world2cv[1][:] + (T_world2cv[1],), R_world2cv[2][:] + (T_world2cv[2],) )) вернуть РТ защита get_3x4_P_matrix_from_blender (камера): K = получить_калибровку_матрицы_K_из_блендера(cam.
data) RT = get_3x4_RT_matrix_from_blender(cam) возврат К@РТ, К, РТ # -------------------------------------------------- --------- # Чередовать 3D-координаты с кодом проекции 2D-пиксельных координат # адаптировано из https://blender.stackexchange.com/questions/882/how-to-find-image-coordinates-of-the-rendered-vertex?lq=1 # чтобы оси y были направлены вверх, а начало координат было в верхнем левом углу def project_by_object_utils (кулачок, точка): сцена = bpy.context.scene co_2d = bpy_extras.object_utils.world_to_camera_view(сцена, камера, точка) render_scale = scene.render.resolution_percentage / 100 рендер_размер = ( int(scene.render.resolution_x * render_scale), int(scene.render.resolution_y * render_scale), ) return Vector((co_2d.x * render_size[0], render_size[1] - co_2d.y * render_size[1])) # -------------------------------------------------- --------- если __name__ == "__main__": # Вставьте сюда имя вашей камеры камера = bpy.
data.objects['Камера.001'] P, K, RT = get_3x4_P_matrix_from_blender(кулачок) распечатать("К") печать(К) распечатать("РТ") печать (РТ) распечатать("П") печать (П) print("==== Тесты ====") e1 = Вектор ((1, 0, 0, 1)) e2 = вектор ((0, 1, 0, 1)) e3 = Вектор ((0, 0, 1, 1)) О = Вектор ((0, 0, 0, 1)) p1 = P @ e1 р1 /= р1[2] print("Прогнозируемый e1") печать (p1) print("Проект от object_utils") печать (project_by_object_utils (камера, вектор (e1 [0: 3]))) р2 = П @ е2 р2 /= р2[2] print("Прогноз e2") печать (p2) print("Проект от object_utils") печать (project_by_object_utils (камера, вектор (e2 [0: 3]))) п3 = П @ е3 р3 /= р3[2] print("Прогноз e3") печать(p3) print("Проект от object_utils") печать (project_by_object_utils (камера, вектор (e3 [0: 3]))) рО = Р@О рО /= рО[2] print("Проецируемое мировое происхождение") печать (рО) print("Проект от object_utils") print(project_by_object_utils(cam, Vector(O[0:3]))) # Бонус-код: сохраните P-матрицу 3x4 в обычный текстовый файл # Не забудьте импортировать numpy для этого nP = numpy.
matrix(P) numpy.savetxt("/tmp/P3x4.txt", nP) # для выбора точности используйте, например, ФМТ='%.2f'
-
Я включил несколько вспомогательных функций и тестов для перекрестной проверки процесса проецирования 3D-2D с помощью другого подхода, использующего world_to_camera_view из ответа @ideasman42 на Как найти координаты изображения отображаемой вершины? Координаты с плавающей запятой идеально совпадают с точностью до многих знаков после запятой. Чтобы получить целочисленные координаты пикселя после проекции, просто округлите их.
-
Я протестировал это визуально и аналитически на нескольких сценах, чтобы убедиться, что обе процедуры работают точно на реальных визуализированных изображениях.
- Я представил e1, e2, e3 и O маленькими конусообразными объектами, кончики которых находились в желаемых положениях. и кодируются разными цветами: красный для X, зеленый для Y, синий для Z
- Сначала я разместил камеру в удобном месте, R = идентичность, T = (0,0,5)
- Я использовал параметры Blender по умолчанию для встроенных функций камеры
- Я вычислил матрицу P вручную и вычислил ее, используя мои процедуры, и они идеально совпадают
- Визуальное сравнение рендеринга Cycles и рендеринга OpenGL в GIMP показывает, что полученные координаты визуально хорошо совпадают (возможно, с ошибкой +- 1 пикселя, что в любом случае было проведено это тщательное тестирование — для изучения).
- Затем я произвольно повернул и перевел камеру так, чтобы миры e1, e2, e3 оставались видимыми и в общих местах. Проекции визуально совпадают в визуализированных изображениях, а также совпадают с проекциями, заданными подпрограммой object utils, приведенной выше.
К
<Матрица 3x3 (2100,0000, 0,0000, 960,0000)
( 0,0000, 2100,0000, 540,0000)
( 0,0000, 0,0000, 1,0000)>
РТ
<Матрица 3x4 (-0,0594, -0,9483, -0,3118, -0,6837)
(0,6234, 0,2087, -0,7536, -0,1887)
(0,7797, -0,2391, 0,5787, 4,2599)>
п
<Матрица 3x4 ( 623,8236, -2220,9482, -99,1637, 2653,7441)
(1730.0916, 309.2392, -1269.9426, 1904.1343)
(0,7797, -0,2391, 0,5787, 4,2599)>
==== Тесты ====
Прогнозируемый e1
<Вектор (650.3716, 721.1436, 1.0000)>
проект от object_utils
<Вектор (650.3716, 721.1436)>
Прогнозируемый e2
<Вектор (107.6402, 550.4857, 1.0000)>
проект от object_utils
<Вектор (107.6403, 550.4857)>
Прогнозируемый e3
<Вектор (527. 9586, 131.0692, 1.0000)>
проект от object_utils
<Вектор (527.9586, 131.0693)>
Проецируемое мировое происхождение
<Вектор (622,9655, 446,9949, 1,0000)>
проект от object_utils
<Вектор (622,9656, 446,9949)>
9586, 131.0692, 1.0000)>
проект от object_utils
<Вектор (527.9586, 131.0693)>
Проецируемое мировое происхождение
<Вектор (622,9655, 446,9949, 1,0000)>
проект от object_utils
<Вектор (622,9656, 446,9949)>
Вот тестовый набор с вращением блендера и расположением камеры. Вот рендер OpenGL. Координаты, выведенные выше, визуально соответствуют кончикам конусов (ошибка до +- 1 пикселя, возможно, из-за алиасинга).
Ограничения : этот код в настоящее время не поддерживает определенные внутренние конфигурации параметров камеры, см. мой ответ на вопрос Что такое матричная модель проекции камеры блендера? для списка ограничений до получить_калибровку_матрицы_K_from_blender .
Координаты объекта : чтобы иметь дело с координатами объекта, сначала преобразуйте его в мировые координаты, см. мой ответ на Как найти координаты изображения отображаемой вершины?
Умножение матрицы было * до Blender 2.8, более новые версии используют @ вместо
Найти внутреннюю матрицу камеры из модели беседки
-
беседка
8
70008
-
мелодичный
спросил 2021-04-28 04:16:58 -0500
xavier12358
37 ●8 ●12 ●18
Привет,
Я сделал модель моей камеры в беседке и хочу извлечь внутреннюю матрицу используйте матрицу Opencv.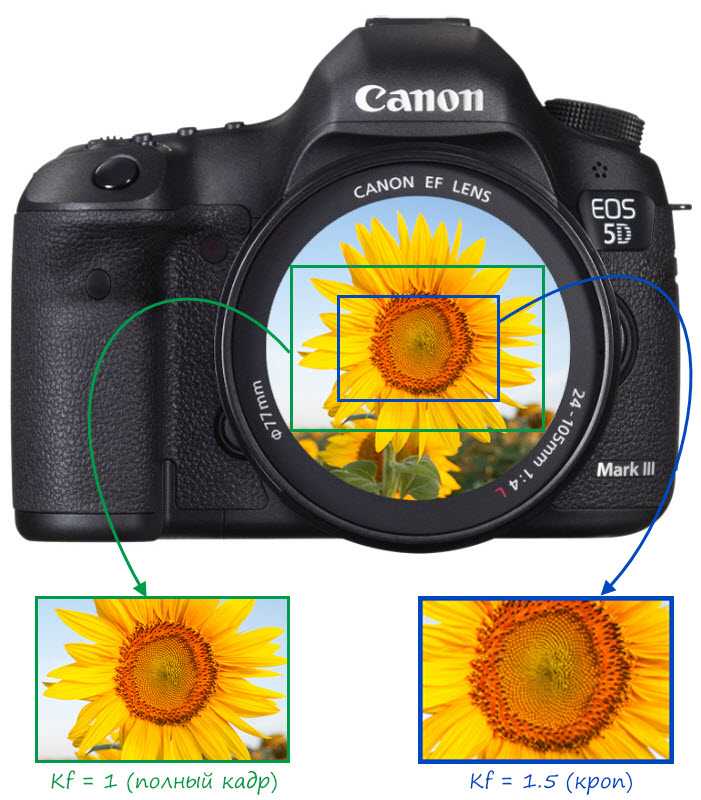 Вот моя модель:
Вот моя модель:
Беседка/Зеленый <тип датчика="камера" имя="камера">30,0 <имя камеры="голова">1,3962634 <изображение> <ширина>1280 <высота>720R8G8B8 <клип>0,02 300 true 0,0 mdt/camera1 image_raw camera_info камера 0,07 <искажениеK1>0,0 <искажениеK2>0,0 <искажениеK3>0,0 <искажениеT1>0,0 <искажениеT2>0,0
Моя внутренняя матрица определяется следующим образом: М = [ ах 0 сх; 0 ау су ; 0 0 1 ] Я думаю, что cx = 1280/2 и cy = 720/2, но как насчет ax/ay?
редактировать перетэг флаг оскорбительный закрыть слияние удалить
1 ответ
Сортировать по » самые старые новые самые популярные
ответил 2021-04-28 23:49:14 -0500
трян
1391 ●95 ●24
обновлено 2021-04-29 09:58:11 -0500
Вы можете получить встроенные функции, подписавшись на тему /camera_info , определенную в плагине:
camera
Сообщение sensor_msgs/CameraInfo будет содержать матрицу камеры:
# Внутренняя матрица камеры для необработанных (искаженных) изображений.# [фх 0 сх] # K = [ 0 ф.в.г.] # [ 0 0 1] # Проецирует 3D точки в кадре координат камеры в 2D пиксель # координаты с использованием фокусных расстояний (fx, fy) и главной точки # (сх, су). поплавок64[9] K # 3x3 мажорная матрица
Кроме того, вы можете явно установить внутренние параметры в Gazebo, как указано в спецификации SDF камеры:
Обновление:
Обратите внимание, что подключаемый модуль ROS и датчик Gazebo используют два отдельных набора внутренних параметров, поэтому пользователь должен убедиться в этом. они правильные. Исходный код плагина ROS показывает, как он использует параметры только для заполнения информации о камере. Вот пример:
30,0 <имя камеры="голова">1,3962634 <изображение> <ширина>800 <высота>800R8G8B8 <клип>0,02 300 <шум>по Гауссу <среднее>0,00,007 <объектив> <внутренние свойства>100 100 <сх>640360 0true 0,0 rrbot/camera1 image_raw camera_info ссылка_камеры <Сх>640360 100
редактироватьфлаг наступлениеудалить ссылка на сайт более
Твой ответ
Пожалуйста, начните публиковать сообщения анонимно - ваша запись будет опубликована после того, как вы войдете в систему или создадите новую учетную запись.
Добавить ответ
Инструменты для вопросов
3 подписчика
Похожие вопросы
хитрая проекционная матрица – Tech from the Front Line
Fruty компьютерная графика 2 минуты
В последнее время я работаю над проектами компьютерного зрения, включая Tensorflow для глубокого обучения, OpenCV для компьютерного зрения и OpenGL для компьютерной графики. Меня особенно интересуют гибридные подходы, в которых я смешиваю материалы глубокого обучения, материалы opencv и классический конвейер OpenGL. Основная идея состоит в том, чтобы не рассматривать проблемы как проблемы черного ящика, бросить на них нейронную сеть и надеяться на лучшее. Основная идея скорее состоит в том, чтобы проделать максимальный объем работы с проверенными технологиями и позволить глубокому обучению работать только над четко определенным подмножеством проблемы.
На этот раз я работал над проблемой дополненной реальности, где у меня есть изображение, и я хочу наложить на него что-то. В OpenCV по изображению можно оценить параметры камеры, которые называются «внутренними параметрами камеры». В модели камеры-обскуры OpenCV этими параметрами являются: fx (горизонтальное фокусное расстояние), fy (вертикальное фокусное расстояние), cx (координата X центра камеры), cy (координата Y центра камеры).
В OpenCV по изображению можно оценить параметры камеры, которые называются «внутренними параметрами камеры». В модели камеры-обскуры OpenCV этими параметрами являются: fx (горизонтальное фокусное расстояние), fy (вертикальное фокусное расстояние), cx (координата X центра камеры), cy (координата Y центра камеры).
Это матрица камеры OpenCV:
Вы хотите наложить материал на исходное изображение. Теперь, когда вы оценили параметр камеры OpenCV, вам нужно превратить его в матрицу проекции OpengL, чтобы вы могли отображать материал поверх исходного изображения с помощью графического конвейера OpenGL. Эта проблема вычисления проекционной матрицы OpenGL из матрицы камеры OpenCV НЕ легко.
Во-первых, матрица камеры OpenCV проецирует вершины прямо в экранные координаты. (ПРИМЕЧАНИЕ: не забудьте затем разделить на компонент z). Матрица проекции OpenGL проецирует вершины в пространство отсечения. Преобразование из пространства клипа в NDC (что означает деление на компонент w) обрабатывается OpenGL, а преобразование из NDC в пространство экрана также обрабатывается OpenGL. Итак, первая проблема заключается в том, что мы рассматриваем не совсем одни и те же преобразования.
Итак, первая проблема заключается в том, что мы рассматриваем не совсем одни и те же преобразования.
Вторая проблема заключается в том, что в OpenGL вы обычно предполагаете, что центр вашей камеры находится в начале координат (это соглашение). В OpenCV это не так, параметры вашей камеры cx и cy позволяют вам иметь центр камеры где угодно, это такая же степень свободы, как и любая другая. 90% формул проекционных матриц OpenGL, которые вы найдете в Интернете, не учитывают этого.
В итоге перепроверил много источников:
https://blog.noctua-software.com/opencv-opengl-projection-matrix.html
http://kgeorge.github.io/2014/03/08 /calculating-opengl-perspective-matrix-from-opencv-intrinsic-matrix
http://ksimek.github.io/2013/06/03/calibrated_cameras_in_opengl/
https://jsantell.com/3d-projection
Но меня спас этот день: https://strawlab.org/2011/11/05/augmented-reality-with-OpenGL
Формула там точная (можно заменить K на матрицу камеры OpenCV).
Вот пример исходного кода, демонстрирующий, как вы можете спроецировать точку с помощью OpenCV и OpenGL и получить одинаковые результаты (таким образом, проверив свои матрицы):
Этот файл содержит двунаправленный текст Unicode, который может быть интерпретирован или скомпилирован иначе, чем появляется ниже. Для просмотра откройте файл в редакторе, который показывает скрытые символы Unicode.
Дополнительные сведения о двунаправленных символах Unicode
Показать скрытые символы
| импорт cv2 | |
| импортировать numpy как np | |
| импорт математики | |
| cx = 88 #главная точка x координата | |
| cy = 109 #главная точка y координата | |
| w = 178 # ширина изображения | |
| ч = 218 #высота изображения | |
| рядом = 10 # рядом с самолетом | |
| дальняя = 20 # дальняя плоскость | |
fovy = 45,0/360,0*2,0*np.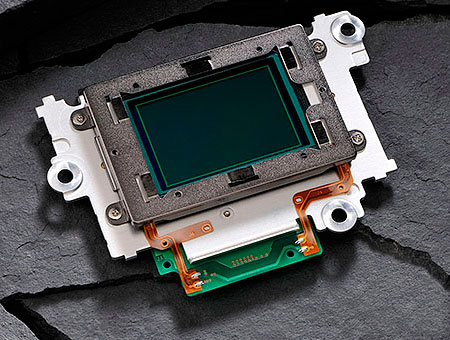 pi #45° в радианах pi #45° в радианах |
|
| f = 0,5 * h/math.tan(fovy/2) #cf http://paulbourke.net/miscellaneous/lens/ (ПРИМЕЧАНИЕ: фокусное расстояние указано в пикселях) | |
| #вычисляем матрицу камеры OpenCV | |
| camera_mtx = np.array([ | |
| [ж, 0, сх], | |
| [0., ж, ци], | |
| [0.,0.,1.] | |
| ], dtype=np.float64) | |
| #мы вычисляем соответствующую проекционную матрицу opengl | |
| #cf https://strawlab.org/2011/11/05/дополненная-реальность-с-OpenGL | |
| #ПРИМЕЧАНИЕ: K00 = K11 = f, K10 = 0,0, K02 = cx, K12 = cy, K22 = 1,0 | |
opengl_mtx = np. array([ array([ |
|
| [2*ф/ш, 0,0, (ш – 2*сх)/ш, 0,0], | |
| [0,0, –2*f/ч, (h – 2*cy)/ч, 0,0], | |
| [0,0, 0,0, (–далеко – ближний) / (далеко – ближний), –2,0*далеко*ближний/(далеко–ближний)], | |
| [0,0, 0,0, –1,0, 0,0] | |
| ]) | |
| #point находится в пространстве камеры opencv (по оси Oz) | |
| point = np.array([1.0, 2.0, 15.0]) #Примечание: координаты должны быть с плавающей запятой | |
| #### Проекция OpenCV | |
screen_point, _ = cv2.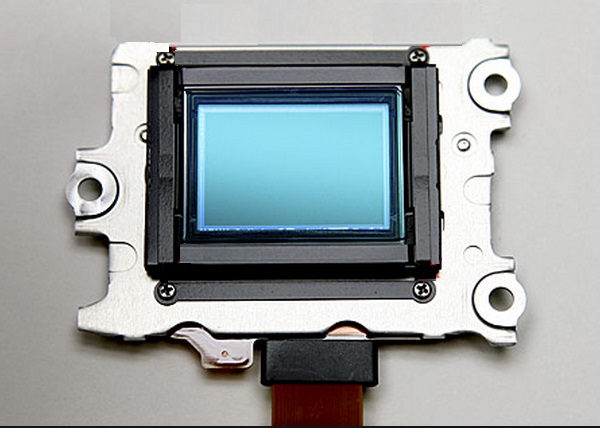 projectPoints(np.array([point]), np.zeros(3), np.zeros(3), camera_mtx, np.zeros(5)) projectPoints(np.array([point]), np.zeros(3), np.zeros(3), camera_mtx, np.zeros(5)) |
|
| печать (экран_точка) | |
| #Примечание: мы получаем тот же результат с этим: (это то, что в основном делает cv2.projectPoints: умножает точки на матрицу камеры, а затем делит результат на координату z) | |
| print(camera_mtx.dot(точка)/точка[2]) | |
| #### Проекция OpenGL | |
| #переворачиваем координату точки z, так как в opengl камера ориентирована по оси -Oz | |
| балла[2] = –точка[2] | |
| point2 = np.hstack([point,1.0]) #добавляем координату вершины w (обычно делается в вершинном шейдере перед умножением на матрицу проекции) | |
| #мы получаем точку в клипе | |
clip_point = opengl_mtx. dot(point2) dot(point2) |
|
| #ПРИМЕЧАНИЕ: последующее «симулирует» то, что происходит в OpenGL после вершинного шейдера. | |
| # Это необходимо, чтобы убедиться, что наша проекционная матрица даст правильный результат при использовании в OpenGL | |
| #получаем точку в НДЦ | |
| ndc_point = клип_точка / клип_точка[3] | |
| # получаем координаты экрана | |
| viewport_point = (ndc_point + 1.0)/2.0 * np.array([w, h, 1.0, 1.0]) | |
| #opencv Соглашение Oy противоположно OpenGL, поэтому мы обращаем координату y | |
| viewport_point[1] = h – viewport_point[1] | |
| печать (viewport_point) | |
| #Теперь вы можете видеть, что viewport_point и screen_point имеют одинаковые координаты x/y! | |
| # Это означает, что теперь из матрицы камеры OpenCv можно использовать OpenGl для рендеринга поверх изображения, | |
| # благодаря проекционной матрице opengl, рассчитанной на основе матрицы камеры opencv | |
| #ПРИМЕЧАНИЕ: когда ближняя плоскость мала (несколько единиц) и фокусное расстояние мало (например: 10-12), | |
#оба результата имеют тенденцию расходиться. Я не уверен, почему формула начинает разваливаться при экстремальных значениях. Я не уверен, почему формула начинает разваливаться при экстремальных значениях. |
просмотреть необработанные данные
test.py
размещено на ❤ GitHub
Полный исходный код можно найти здесь: https://github.com/francoisruty/fruty_opencv-opengl-projection-matrix
Когда у вас есть проекционная матрица OpenGL, вы можете выполнять рендеринг и наложение все, что вам нужно на вашем изображении. Сначала я ожидал, что этот шаг займет у меня 1 или 2 часа, а в итоге у меня ушло 6 или 7 часов, поэтому я решил поделиться решением.
Нравится:
Нравится Загрузка...
Мысли и мнения технического директора стартапа, увлеченного аэрокосмической и компьютерной графикой Просмотреть все сообщения пользователя Fruty
Опубликовано
Цвет: определение прямой матрицы для вашей камеры
Из предыдущей статьи мы поняли, что рендеринг цвета с помощью необработанного преобразования Adobe DNG по сути означает преобразование необработанных данных в виде триплетов в стандартное цветовое пространство через пространство подключения профиля в два этапа. процесс
процесс
Первый шаг выполняет балансировку белого и демозаику необработанных данных, которые на этом этапе мы будем называть , с последующим преобразованием их в пространство соединения профиля посредством линейной проекции с помощью неизвестной «прямой матрицы» (как вызывает DNG это) формы
(1)
с данными в виде векторов-столбцов в массиве 3xN. Определение девяти коэффициентов этой матрицы является основной темой данной статьи [1] .
На втором этапе полученная информация об изображении проецируется в «выходное» колориметрическое цветовое пространство, выбранное фотографом, например, sRGB или Adobe RGB. Необходимые линейные матрицы для этого преобразования стандартизированы и легко доступны в Интернете.
9 Уравнения и 9 неизвестных
Так как же нам определить девять коэффициентов прямой матрицы в уравнении 1?
9 неизвестных коэффициентов работают с данными баланса белого и демозаики, чтобы линейно преобразовать их в данные.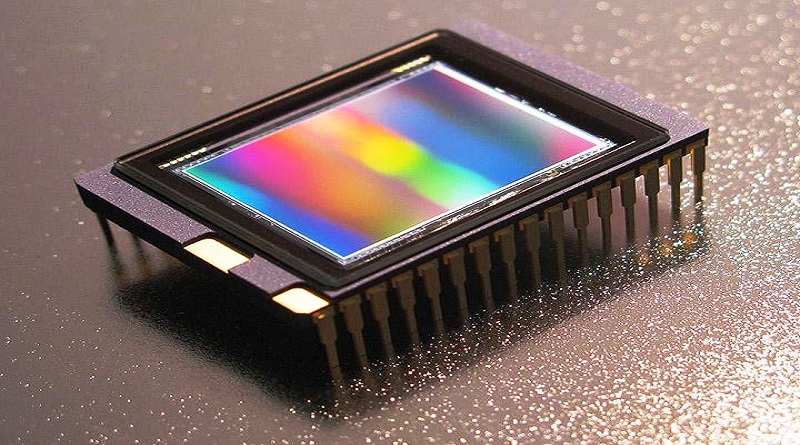 Отсюда следует, что если бы у нас было три набора значений при освещении и мы знали их соответствующие триплеты, мы могли бы найти коэффициенты. Результаты будут действительны для данного оборудования, сцены и освещения.
Отсюда следует, что если бы у нас было три набора значений при освещении и мы знали их соответствующие триплеты, мы могли бы найти коэффициенты. Результаты будут действительны для данного оборудования, сцены и освещения.
Например, мы могли бы зафиксировать в необработанных данных 3 пятна равномерного диффузного отражения, освещенного источником света камерой, матрицу которой мы хотим определить, таким образом получив три набора значений; затем измерьте с помощью спектрофотометра или аналогичного прибора отражательную способность 3 участков и спектральное распределение мощности источника света; и рассчитайте значения , которые подразумевают коэффициент отражения и источник света.
Все, что осталось сделать, это собрать пары 3×3 и соответствующие данные согласно уравнению (1) и умножить их. Ниже s, составляющих неизвестные, будут известны X, Y, Z и s:
(2)
9 уравнений и 9 неизвестных обеспечивают гарантированное решение для коэффициентов относительной прямой матрицы. Выглядит легко? На самом деле это намного проще.
Выглядит легко? На самом деле это намного проще.
1 Capture, 72 Equations
X-Rite производит ряд стандартных мишеней ColorChecker 24, информация об отражательной способности которых публикуется и хорошо изучена. В этом примере я буду использовать их удобную версию Passport Photo.
24 пятна в мишени ColorChecker несут коэффициенты отражения, которые должны быть репрезентативными для повседневных фотографических объектов, таких как кожа, листва и цвета неба. Специалисты по цвету на BabelColor.com измерили выборку из 30 мишеней ColorChecker за несколько лет и сравнили их с опубликованными спецификациями (показаны формулировки до ноября 2014 года, так как мое устройство старше) [2] :
Рисунок 1. Средние измерения 30 мишеней ColorChecker 24 до 2015 года от BabelColor.com Обратите внимание, что 1 должен представлять только заметную разницу в цвете, так что вы можете видеть, что, за исключением фиолетового и белого, пятна действительно обеспечивают достаточно стабильный эталон. Эта информация, а также средняя отражательная способность пятна от 380 до 730 нм с шагом 10 нм доступны в электронной таблице по соответствующей ссылке выше.
Эта информация, а также средняя отражательная способность пятна от 380 до 730 нм с шагом 10 нм доступны в электронной таблице по соответствующей ссылке выше.
Бинго! цветовое пространство L*a*b* представляет собой простое преобразование от . С приведенными выше данными и одним необработанным захватом цели ColorChecker Passport Photo при ясном полуденном солнечном свете (назовем его D50) у нас есть 24, а не всего 3 набора триплетов необработанных и эталонных данных, необходимых для расчета коэффициентов Forward. Матрица в уравнении 1, делающая систему переопределенной. Мы можем использовать больший набор данных, чтобы убедиться, что коэффициенты соответствуют большему количеству потенциальных фотографических объектов — вот почему они называют это 9.0149 компромисс цветовая матрица. Спуск затвора.
Рис. 2. Паспорт X-Rite ColorChecker до 2015 г. Фотография сделана на Nikon D610 с объективом 24-120 мм/4 при 120 мм, 1/800 с, f/5,6, ISO 100 в начале сентября в 11:27 в ясный горный день. Коррелированная цветовая температура находится в диапазоне 5000-5200К.
Коррелированная цветовая температура находится в диапазоне 5000-5200К. Вычисление коэффициентов по нормальному уравнению
Итак, теперь у нас есть цель cc24, освещенная источником примерно D50, захваченным в необработанном файле Nikon D610+24-120mm/4. Затем мы считываем средние значения в трех цветовых каналах для каждого из 24 патчей с помощью такого инструмента, как RawDigger 9.0663 [3] . Затем мы балансируем их по белому на основе третьего серого пятна справа в нейтральном нижнем ряду и демозаизируем их. Результатом стал нужный нам набор исходных данных с балансировкой белого и демозаикой, по одному триплету на патч.
Затем мы могли бы получить эталон, соответствующий каждому патчу, путем их измерения или с помощью значений ColorChecker, опубликованных X-Rite или BabelColor, как указано выше, и решить 72 уравнения для коэффициентов в матрице, которые лучше всего соответствуют доступным данным, используя нормальное уравнение. Чтобы соответствовать формату умножения матриц и уравнению (1), решение можно представить следующим образом:
(3)
с представлением транспонирования, инверсии относительных массивов и данных Nx3, как вы найдете в скрипте Matlab, указанном в примечаниях. Вуаля, с помощью волшебства линейной алгебры уравнение 3 создаст компромиссную цветовую матрицу 3×3, в результате чего будет получена наименьшая сумма квадратов разностей измеренных эталонных значений для целевого объекта (если вам нужна дополнительная информация по этому вопросу, вас может заинтересовать статью о преобразовании цвета).
Вуаля, с помощью волшебства линейной алгебры уравнение 3 создаст компромиссную цветовую матрицу 3×3, в результате чего будет получена наименьшая сумма квадратов разностей измеренных эталонных значений для целевого объекта (если вам нужна дополнительная информация по этому вопросу, вас может заинтересовать статью о преобразовании цвета).
Однако это оказывается не лучшим способом решения, потому что метод придает одинаковый вес всем тонам, в то время как зрительная система человека имеет тенденцию быть более чувствительной в одних частях цветового пространства XYZ, чем в других.
Лучшая метрика цветового различия: dE2000
В дальнейшем я буду использовать стандартное цветовое различие (CIEDE2000) в качестве критерия минимизации. Мы можем создать электронную таблицу с 24 триплетами и 9 ячейками, представляющими коэффициенты прямой матрицы в виде массивов. Заполните коэффициенты результатом уравнения (3) выше, чтобы получить приблизительные результаты. Матрица умножьте триплеты на исходную матрицу, преобразуйте в L*a*b*, вычислите разницу с эталонными значениями на рис. 1 выше и позвольте Excel Solver выяснить, какие значения 9коэффициенты минимизации суммы разностей. Результирующая матрица будет лучшим компромиссом, найденным для 24 участков под этим источником света, принимая во внимание цветовую чувствительность HVS, таким образом, придавая каждому участку приблизительно одинаковую важность для восприятия.
1 выше и позвольте Excel Solver выяснить, какие значения 9коэффициенты минимизации суммы разностей. Результирующая матрица будет лучшим компромиссом, найденным для 24 участков под этим источником света, принимая во внимание цветовую чувствительность HVS, таким образом, придавая каждому участку приблизительно одинаковую важность для восприятия.
Передовая матрица компромисса
Я эффективно следовал этой последней процедуре, но использовал Matlab/Octave вместо Excel. Если вы хотите продолжить, вы можете загрузить процедуру, которую я использовал, из соответствующего примечания внизу статьи. Отличный инструментарий OptProp и его встроенные справочные данные ColorChecker протянули руку помощи [4] . Это прямая матрица, полученная для моей установки:
Круто. Это различия для каждого патча, полученные в результате преобразования с использованием эталонных данных OptProp ColorChecher.
Рисунок 3. Разница CIEDE2000 между необработанными измеренными значениями с рисунка 2, преобразованными в L*a*b* через XYZD50 с помощью вычисленной прямой матрицы и эталонных значений ColorChecker, встроенных в optprop, которые использовались для ее получения.
Среднее значение – 1,5, а максимальное – 3,8 для участка со светлой кожей. Напомним, что 1 — это едва заметная разница. На этот раз я повторил упражнение, используя базу данных BabelColor 30 в качестве эталона, и вот результирующая прямая матрица, тогда:
Похоже, что различия со справочными данными из базы данных BabelColor распределены более равномерно: среднее значение по-прежнему составляет 1,5, но максимальное значение ниже 3,1 в «зеленом» патче.
Рис. 4. Разница CIEDE2000 между измеренными необработанными значениями с рис. 2, преобразованными в L*a*b* через XYZD50 с помощью вычисленной прямой матрицы и эталонных значений ColorChecker базы данных BabelColor, которые использовались для ее получения. Чтобы сделать это правильно, я должен был измерить спектральное распределение мощности источника света и отражательную способность пятен с помощью спектрофотометра примерно в то время, когда был сделан снимок (у меня его не было, X-Rite ColorMunki Photo в пути, см. пост скриптум). Использование опубликованных эталонных SPD и коэффициентов отражения загрязняет данные и способствует ухудшению результатов, но вы поняли идею.
пост скриптум). Использование опубликованных эталонных SPD и коэффициентов отражения загрязняет данные и способствует ухудшению результатов, но вы поняли идею.
Исправление «ошибок» матрицы: профили
Однако обратите внимание, что матрица компромисса — это всего лишь компромисс, и даже если бы процедура была идеальной, это могло привести к относительно большим ошибкам. Для улучшения общей производительности цветопередачи предпочтительным методом является исправление таких ошибок с помощью дополнительных нелинейных настроек цветового профиля, которые обычно вводятся во время работы с таблицами поиска ProPhoto RGB HSV. Таблицы и методы применения обычно называются «профилями» камеры (например, ICC и DCP), что выходит за рамки данной статьи [5] .
Расчет индекса метамерии чувствительности (SMI)
Пока нет данных, мы можем рассчитать индекс метамерии чувствительности, который для нас равен 100 минус 5,5-кратное среднее (не) всего 18 цветовых участков [6] . Показанные значения (ошибочно названные CRI выше) не обязательно максимальны для данной настройки, потому что процедура поиска матрицы построена на минимизации . Тем не менее, мой D610 с его 24-120 мм/4 вокруг D50 показывает SMI 80 в первом случае и 83 во втором. Они перескакивают на 82 и 86 соответственно, если вместо этого программа настроена на минимизацию. Неплохо, хотя я знаю, что некоторые люди не доверяют однозначным показателям, и я понимаю, почему.
Показанные значения (ошибочно названные CRI выше) не обязательно максимальны для данной настройки, потому что процедура поиска матрицы построена на минимизации . Тем не менее, мой D610 с его 24-120 мм/4 вокруг D50 показывает SMI 80 в первом случае и 83 во втором. Они перескакивают на 82 и 86 соответственно, если вместо этого программа настроена на минимизацию. Неплохо, хотя я знаю, что некоторые люди не доверяют однозначным показателям, и я понимаю, почему.
Шаг 2: Матрица для вывода цветового пространства
Теперь, когда мы выполнили тяжелую работу по определению прямой матрицы для преобразования необработанных данных баланса белого в PCS с этим источником света, нам нужна стандартная матрица, чтобы перейти к колориметрическому цветовое пространство, выбранное фотографом для вывода. В этом случае мы сопоставим его с помощью умножения на следующую матрицу преобразования, полученную с сайта Брюса Линдблума [7]
. Осветитель D50ish. Мои результаты показаны вверху и внизу, а DXOmark для D610 на D50 в центре для эталона [8] :
Рис. 5. Прямые матрицы от исходных данных баланса белого до XYZD50 для Nikon D610+24-120/4 при освещении приблизительно D50. Вверху: матрица, рассчитанная с помощью процедуры, описанной в этой статье, из необработанных данных на рис. 2 со встроенными в optprop эталонными значениями ColorChecker. В центре: матрица DXOmark.com D50. Внизу: матрица, рассчитанная в этой статье из необработанных данных на рисунке 2 с эталонными значениями ColorChecker базы данных BabelColor 30.
5. Прямые матрицы от исходных данных баланса белого до XYZD50 для Nikon D610+24-120/4 при освещении приблизительно D50. Вверху: матрица, рассчитанная с помощью процедуры, описанной в этой статье, из необработанных данных на рис. 2 со встроенными в optprop эталонными значениями ColorChecker. В центре: матрица DXOmark.com D50. Внизу: матрица, рассчитанная в этой статье из необработанных данных на рисунке 2 с эталонными значениями ColorChecker базы данных BabelColor 30. Довольно близко, что подтверждает, что осветитель моих снимков действительно был близок к D50.
Вот откуда берутся цветовые матрицы и зачем они нам нужны. Далее рассмотрим поближе и заставим их работать.
Post Scriptum
Я купил себе спектрофотометр X-Rite ColorMunki Photo [Редактировать: его аппаратное обеспечение должно быть идентично обновленному i1 Studio, также известному как Calibrite ColorChecker Studio], это взрыв. Он поставляется с ColorChecker Classic Mini, я полагаю, с новой формулой. Я измерил его с помощью Munki, используя открытый исходный код Spotread 9.0150 от ArgyllCMS и зафиксировал его в необработанных данных в условиях, в чем-то схожих с рис. 2. Коррелированная цветовая температура составила около 5050K. Это матрицы, полученные из него (белый баланс с моей карты WhiBal):
Я измерил его с помощью Munki, используя открытый исходный код Spotread 9.0150 от ArgyllCMS и зафиксировал его в необработанных данных в условиях, в чем-то схожих с рис. 2. Коррелированная цветовая температура составила около 5050K. Это матрицы, полученные из него (белый баланс с моей карты WhiBal):
Довольно похоже, и SMI теперь равен 85. На самом деле, если я настрою подпрограмму на минимизацию вместо SMI, получится 86. Сумма строк в матрице XYZ должна представлять белую точку целевого источника света, которая в данном случае была просто эталонными данными для D50. Белая точка матрицы составляет [0,9609 1 0,8214], который, по словам Брюса, имеет коррелированную цветовую температуру 5016K. Хорошо, потому что у D50 CCT 5002К.
Ниже приведены различия, измеренные и полученные:
Рисунок 6. CIEDE2000, полученный с помощью ColorChecker mini, измеренный с помощью спектрофотометра ColorMunki и захваченный в необработанных данных в конце декабря на высоте около 1700 м, в 14:00, солнечный день со снегом на земле. CCT составляет около 5050К.
CCT составляет около 5050К. Сейчас среднее значение составляет 1,17, только три патча выше 2, а остальные в целом контролируются лучше. Я предполагаю, что подавление выбросов является причиной того, что линейных матриц недостаточно, а необходимы профили. Чтобы подойти еще ближе, мне нужно было взять с собой манки и измерить источник света. Ну, в следующий раз.
Примечания и ссылки
1. Как всегда, много оговорок и упрощений для ясности. Я не специалист по цвету, поэтому, если вы заметите какие-либо ошибки, сообщите мне об этом.
2. Страницы ColorChecker на BabelColor.com можно найти здесь. Обратите внимание, что в ноябре 2014 года произошли изменения в формулировках.
3. RawDigger можно найти здесь, а dcraw — здесь.
4. optprop можно найти здесь.
5. Пример реализации профиля см., например, в спецификации цифровых негативов Adobe версии 1.4.0.0.
6. См. здесь описание индекса метамеризма чувствительности и здесь его мнение ДХО.
7. На этой странице сайта Брюса Линдблума приведены точные матрицы от XYZD50 до многих колориметрических цветовых пространств.
На этой странице сайта Брюса Линдблума приведены точные матрицы от XYZD50 до многих колориметрических цветовых пространств.
8. DXOmark.com Измерение цвета D610 можно найти здесь, щелкнув вкладку «цветовой отклик».
9. Процедуру поиска матриц Matlab/Octave, которую я использовал, можно скачать отсюда. В этой теме обсуждается код. Если у вас есть какие-либо вопросы, дайте мне знать в комментариях или через форму на странице «О нас» вверху справа.
Система камер предотвращения столкновений OmniPro® — Matrix Design Group
Для вилочных погрузчиков и мобильного оборудования малого и среднего размера
OmniPro®
OmniPro® — это камера безопасности, использующая визуальный искусственный интеллект. для обнаружения людей, транспортных средств и объектов, таких как знаки остановки, в пределах предполагаемого пути движения мобильного оборудования и оповещения оператора об их присутствии.
-
- Предупреждает, фотографирует и сообщает о нарушениях зоны; фотографии записываются, присваиваются временные метки и сохраняются на флэш-накопителе USB, входящем в комплект каждой камеры.

- Персональные носимые устройства или бирки не требуются.
- Имеет поле обзора 120° на каждую камеру и может работать с тремя камерами.
- Инструмент настройки сетки зон поля зрения позволяет программировать зоны оповещения, которые можно адаптировать к рабочей среде.
- Использует звуковое или визуальное оповещение. Экранный монитор также доступен.
- Прочная конструкция для увеличения срока службы в промышленных условиях с высокой вибрацией.
- Предупреждает, фотографирует и сообщает о нарушениях зоны; фотографии записываются, присваиваются временные метки и сохраняются на флэш-накопителе USB, входящем в комплект каждой камеры.
МЕНЮ ОБНАРУЖЕНИЯ ОБЪЕКТОВ
-
- Лицо
- Грузовик
- Автомобиль
- Вилочный погрузчик
- Знак "Стоп"
- Пешеходный знак
Операторы оборудования могут выбрать любой или все эти элементы, чтобы лучше соответствовать их требованиям безопасности и условиям эксплуатации.
СКАЧАТЬ МАТЕРИАЛ
Для того, чтобы OmniPro «увидел»
, не требуется личное устройство или тег
!
Управление перекрестком
На перекрестках складов с интенсивным движением, где мобильное оборудование и люди пересекают общие проходы, система контроля пересечений OmniPro может помочь снизить вероятность несчастных случаев.
Узнайте больше!
ПОВЫСЬТЕ ФАКТОР БЕЗОПАСНОСТИ ВАШЕЙ РАБОТЫ
- Конструкция Plug-and-play для легкой установки, настройки и эксплуатации.
- Программируемые зоны оповещения соответствуют вашей операционной среде.
- В системах с двумя камерами OmniPro автоматически переключается на наблюдение только за направлением движения автомобиля (уменьшает количество ложных предупреждений).
- Работает как независимая система оповещения или может быть интегрирована в машину.
- Рабочие не носят персональное устройство определения местоположения.

OmniPro для добычи полезных ископаемых
Используйте OmniPro на транспортных средствах малого и среднего размера на горнодобывающих предприятиях.
Узнайте больше!
МАТРИЦА
Новости
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее
Подробнее