МИФ О МЕГАПИКСЕЛЯХ – Our Texas – Russian Newspaper in Houston, Dallas, San-Antonio, Austin, Texas
Цифровая фотография развивается стремительно. Еще несколько лет назад мы и мечтать не могли о 6-8 мегапиксельных цифровых камерах, а сейчас 12-мегапиксельная «мыльница» – уже обыденное явление. Ведущие фирмы-производители обновляют свою линейку компактных цифровых камер каждые полгода. И, конечно же, каждая новая модель имеет больше мегапикселей, чем предыдущая. Среди пользователей компактных цифровых камер существует мнение, что чем больше у камеры мегапикселей, тем она лучше, тем качественнее она снимает. Поэтому в угоду потребителю производители фотоаппаратуры устраивают «гонку мегапикселей», все увеличивая и увеличивая разрешение своих камер, всеми силами стараясь поддержать это мнение. Давайте же разберемся, верно ли это утверждение? Миф это или реальность.
Очень часто на вопрос: «Какая матрица у вашего фотоаппарата?», пользователь отвечает: «Столько-то мегапикселей». А между тем, ответ на этот вопрос должен содержать гораздо больше информации. И, что интересно, информация о мегапикселях – не самая важная. Гораздо важнее знать физический размер матрицы, который, если вы заглянете в характеристики вашего фотоаппарата, обозначается в виде дроби и измеряется в дюймах. Например, 1/2,5”. Мы не будем сейчас касаться вопроса, откуда взялось это обозначение и что оно значит, приведем лишь таблицу с размерами наиболее распространенных матриц:
А между тем, ответ на этот вопрос должен содержать гораздо больше информации. И, что интересно, информация о мегапикселях – не самая важная. Гораздо важнее знать физический размер матрицы, который, если вы заглянете в характеристики вашего фотоаппарата, обозначается в виде дроби и измеряется в дюймах. Например, 1/2,5”. Мы не будем сейчас касаться вопроса, откуда взялось это обозначение и что оно значит, приведем лишь таблицу с размерами наиболее распространенных матриц:
| Тип | Диагональ, мм | Длина, мм | Ширина, мм | Площадь, мм² |
| Пленка 35 мм | 43.300 | 36.000 | 24.000 | 864.000 |
| Зеркальная камера формата “APS-C” (например, Canon и Nikon) | 26.681
28.401 |
22.200
23.600 |
14.800
15.800 |
328.560
372.880 |
| Зеркальная камера формата 4/3″ (например, Olympus) | 22.500 | 18.000 | 13. 500
500 |
243.000 |
| Компактная камера 1/7″ | 9.500 | 7.600 | 5.700 | 43.320 |
| Компактная камера 1/8″ | 8.933 | 7.176 | 5.319 | 38.169 |
| Компактная камера 1/2,3″ | 7.700 | 6.160 | 4.620 | 28.459 |
| Компактная камера 1/2,5″ | 7.182 | 5.760 | 4.290 | 24.710 |
Из таблицы видно, что у компактных камер матрица, по крайней мере, в 5-6 раз меньше, чем у зеркальных камер, и в 20 раз меньше кадра на фотопленке. Чем же так важен размер матрицы?
Прежде чем ответить на этот вопрос, скажем несколько слов об устройстве матрицы. Матрица состоит из множества очень маленьких детекторов света, которые преобразуют свет, падающий на них, в электрический сигнал. Их, собственно, и называют пикселями. В спецификации к цифровой камере пишут, что разрешение составляет, например, 3872 х 2592. Это и есть количество пикселей вдоль длинной и вдоль короткой сторон матрицы.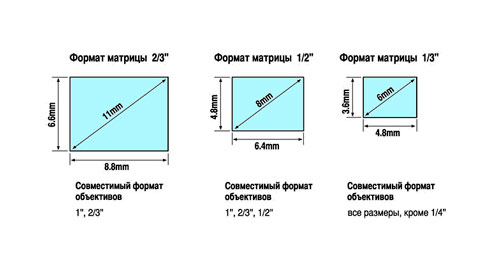
Чтобы камера могла различать цвета, на пиксели наносят цветофильтры. Как известно, практически любой цвет можно получить смешением трех основных цветов – красного, зеленого и синего. Таким образом, для того, чтобы пикселю соответствовал свой основной цвет, на него наносят фильтр соответствующего цвета. Фильтр пропускает фотоны только своей длины волны. Волны другой длины, то есть другого цвета, он не пропускает. Вдобавок, чтобы увеличить чувствительность пикселя к свету, сверху на цветофильтр ставится микролинза. В результате пиксель представляет собой бутерброд довольно сложной конструкции, состоящий из детектора света, цветофильтра и микролинзы.
Каким же образом размер пикселя влияет на качество снимка? Очень просто – чем меньше площадь пикселя, тем меньше света на него попадет и тем слабее будет сигнал, из которого потом складывается изображение. Особенно сильно это влияет на шумы, цветопередачу и динамический диапазон.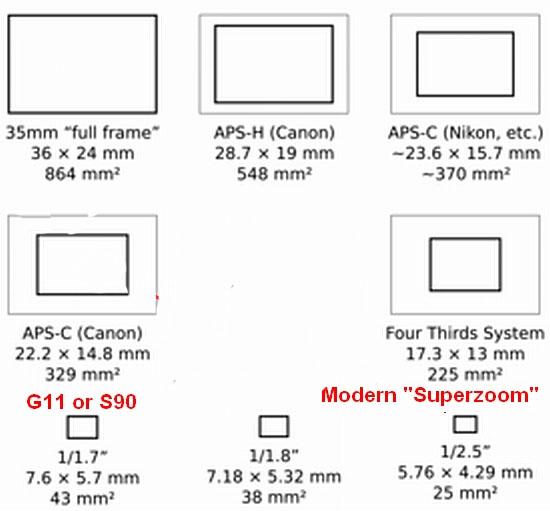
Чем меньше размер пикселя, тем больше шум. Именно поэтому у цифровых зеркальных камер изображение гораздо менее шумное, а, следовательно, более качественное. Надо заметить, что на шум еще очень сильно влияет чувствительность, которую вы устанавливаете на своем цифровом аппарате. Но это тема отдельного разговора.
На матрицах большего размера явно чище цвета, переходы между ними более натуральные. Особенно это заметно при съёмке человеческой кожи. На маленьких матрицах цвета в тенях пропадают.
Динамический диапазон – это способность матрицы передавать одинаково детальное изображение предметов, находящихся как в тени, так и на солнце. Предположим, вы хотите снять кадр, в котором есть предметы, находящиеся и на свету, и в тени. Фотоаппарат настроился по тем предметам, которые находятся на свету. Пиксели получили от этих предметов достаточное количество фотонов, и изображение этих предметов получилось хорошим. Но от предметов в тени фотонов (то есть света) на матрицу попадает очень мало, и если у вас пиксели по размеру маленькие, то они смогут уловить очень небольшое количество фотонов.
Так что же, чем больше у фотоаппарата мегапикселей, тем хуже? Необязательно. Вне всякого сомнения, нельзя бесконечно увеличивать количество мегапикселей, не увеличивая при этом размеров матрицы. 12 мегапикселей – это уже критично для матрицы размером 1/2,5”. Проблема «гонки мегапикселей» определенно существует. Пока еще если у вашего фотоаппарата больше мегапикселей, типичные любительские фотографии (пейзажи, архитектура, репортажи), снятые ясным днем при благоприятном освещении, получаются лучше.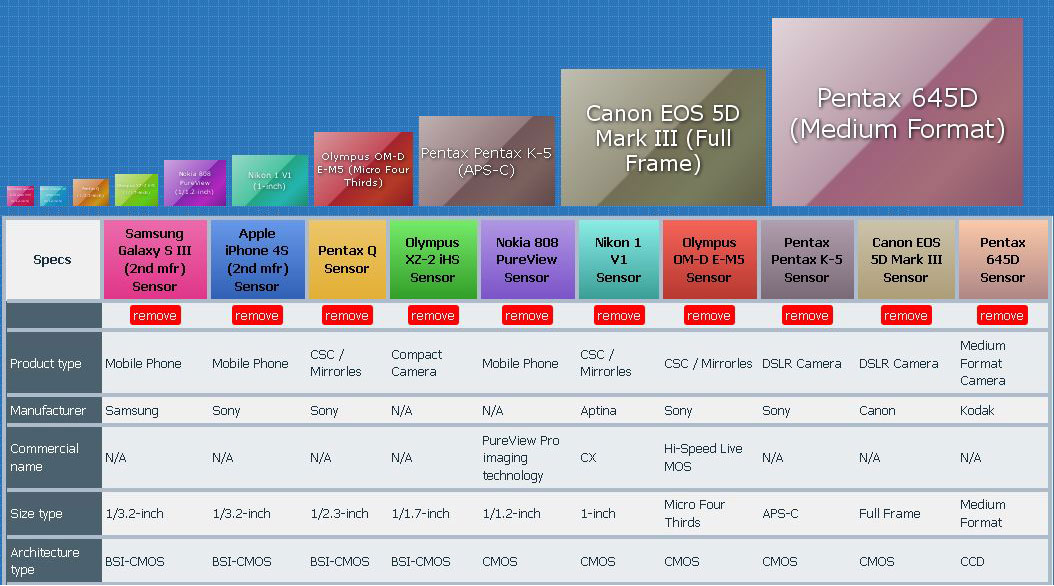 Даже если размер матрицы при этом маленький. Но в условиях, когда света недостаточно (например, при съемке в помещении), предпочтение следует отдавать камерам с большим размером матрицы. Именно поэтому, выбирая фотоаппарат, необходимо чётко представлять себе, какому жанру фотосъемки вы будете отдавать предпочтение. Зачем платить лишние деньги за бесполезные мегапиксели? Вы согласны?
Даже если размер матрицы при этом маленький. Но в условиях, когда света недостаточно (например, при съемке в помещении), предпочтение следует отдавать камерам с большим размером матрицы. Именно поэтому, выбирая фотоаппарат, необходимо чётко представлять себе, какому жанру фотосъемки вы будете отдавать предпочтение. Зачем платить лишние деньги за бесполезные мегапиксели? Вы согласны?
Как определиться с характеристиками фотоаппарата
Матрица
Матрица — это площадка со светочувствительными элементами – пикселями. Каждый пиксель матрицы при попадании на него света вырабатывает электрический ток, сила которого зависит от интенсивности света. Зная для пикселей только интенсивности света мы получим черно-белую картинку. Чтобы получить цветное изображение, для каждого пикселя используется свой фильтр: красный, зеленый или синий. Все остальные цвета получают путем смешивания трех основных. У матрицы есть два основных параметра, влияющих на качество получаемого изображения.
Разрешение матрицы, измеряющиеся в мегапикселях. Так если у матрицы фотоаппарата 4 Мегапикселя (Мп), то это означает, что на площадке помещается 4 миллиона пикселей (ячеек). Чем выше разрешение, тем больше способность фотоаппаратра отображать мелкие детали на снимке. Однако, гнаться за мегапикселями не стоит. Для печати фотографий 10х15 см хватит и 1 мегапикселя. Наилучшим выбором будет камера на 3-5 мегапикселей, снятые с ей помощью фотографии можно будет печатать вплоть до формата A4 (20х30см).
Размер матрицы. В популярных моделях используются матрицы с линейными размерами от 1/1.8 до 1/3.2 дюйма. В первом случае матрица имеет больший размер. Большая матрица дает следующие преимущества:
может зарегистрировать большее количество света (передать больше оттенков),
и имеет меньший уровень шума.
Таким образом, если сравнить две матрицы размерами 1/1.8 и 1/3.2 с одинаковым количеством пикселей (например, 4Мп), лучшей будет первая, так как 4 миллиона пикселей расположены на большей площади, и, следовательно, такая матрица будет давать лучшую картинку (более качественную и менее зашумлённую). В ином случае, когда сравниваются две матрицы c одинаковыми размерами, но с разным числом мегапикселей, например, 6 и 7, лучше также выбрать первую, так как это не только сэкономит деньги, но и позволит получить более качественные снимки в дальнейшем. Впрочем, это верно при сравнении матриц одного производителя или одной линейки фотокамер, у разных производителей могут быть разные типы матриц с несравнимыми характеристиками.
В ином случае, когда сравниваются две матрицы c одинаковыми размерами, но с разным числом мегапикселей, например, 6 и 7, лучше также выбрать первую, так как это не только сэкономит деньги, но и позволит получить более качественные снимки в дальнейшем. Впрочем, это верно при сравнении матриц одного производителя или одной линейки фотокамер, у разных производителей могут быть разные типы матриц с несравнимыми характеристиками.
Чувствительность матрицы (ISO). Изменяется в диапазоне значений от 50 до 3200. При высокие чувствительности можно сделать четкий снимок в сумерках или даже ночью, правда при высокой чувствительности сопутствует появление шума.
Объектив
Именно благодаря объективу свет попадает в камеру и формируется изображение на матрице. От качества объектива во многом зависит качество получаемого изображения – четкость, резкость, отсутствие искажений и т.п. Важными элементами объектива являются линзы и диафрагма. Линзы отвечают за характер света, а диафрагма позволяет контролировать количество этого света. Закрывая диафрагму до минимальных значений, мы можем уменьшить количество света попадающего на матрицу.
Закрывая диафрагму до минимальных значений, мы можем уменьшить количество света попадающего на матрицу.
Основные характеристики объектива:
Светосила. Светосила – это значение максимально открытой диафрагмы. Чем больше светосила объектива, тем лучше и дороже фотоаппарат. При одних и тех же условиях освещенности, объектив с большей светосилой позволяет снимать на более коротких выдержках.
Обычно маркировка объектива выглядит так: 5.8-34.8mm 1:2.8-4.8. Первая пара чисел это фокусное расстояние (расстояние от передней линзы объектива до матрицы). Вторая пара чисел — это соответствующие значения светосилы объектива. Например, здесь в положении 34.8мм (на максимальном зуме) объектив имеет светосилу 4.8. Чем меньше числа светосилы, тем лучше. Объектив с характеристиками 5.8-34.8мм 1:2-3.2 считался бы более светосильным.
Фокусное расстояние. От фокусного расстояния зависит угол обзора объектива и то, как далеко он «видит». Для цифровых фотоаппаратов фокусное расстояние приводят также в 35мм эквиваленте. Это связано с тем, что диагональ матрицы меньше диагонали кадра 35мм пленки, те есть матрица охватывает не все поле кадра, откуда и возникает понятие увеличения фокусного расстояния (Focal Length Multiplier). У разных камер этот фактор колеблется от 1.3 до 1.6. Угол обзора. Напрямую зависит от фокусного расстояния. Примерно соответствующим углу обзора глаза человека считается объектив с фокусным расстоянием 50мм. Объективы с меньшим фокусным расстоянием- широкоугольники, с большим – телеобъективы.
Это связано с тем, что диагональ матрицы меньше диагонали кадра 35мм пленки, те есть матрица охватывает не все поле кадра, откуда и возникает понятие увеличения фокусного расстояния (Focal Length Multiplier). У разных камер этот фактор колеблется от 1.3 до 1.6. Угол обзора. Напрямую зависит от фокусного расстояния. Примерно соответствующим углу обзора глаза человека считается объектив с фокусным расстоянием 50мм. Объективы с меньшим фокусным расстоянием- широкоугольники, с большим – телеобъективы.
Зум (zoom). Зум объектива вычисляется очень просто: для этого нужно большее фокусное расстояние разделить на меньшее. Для фотоаппарата, указанного выше, зум равен 34.8/5.8=6. Что и указано производителем. Если фотоаппарат снабжен объективом без зума, то на нем указывается его фокусное расстояние и светосила: например, 20mm 1:2.8. Чем больше зум фотоаппарата, тем сложнее его конструкция, и производителю приходится находить компромисс между стоимостью и качеством. Поэтому ультразумы (6-12x) обычно дают худшую картинку по сравнению с умеренными зумами (до 3x).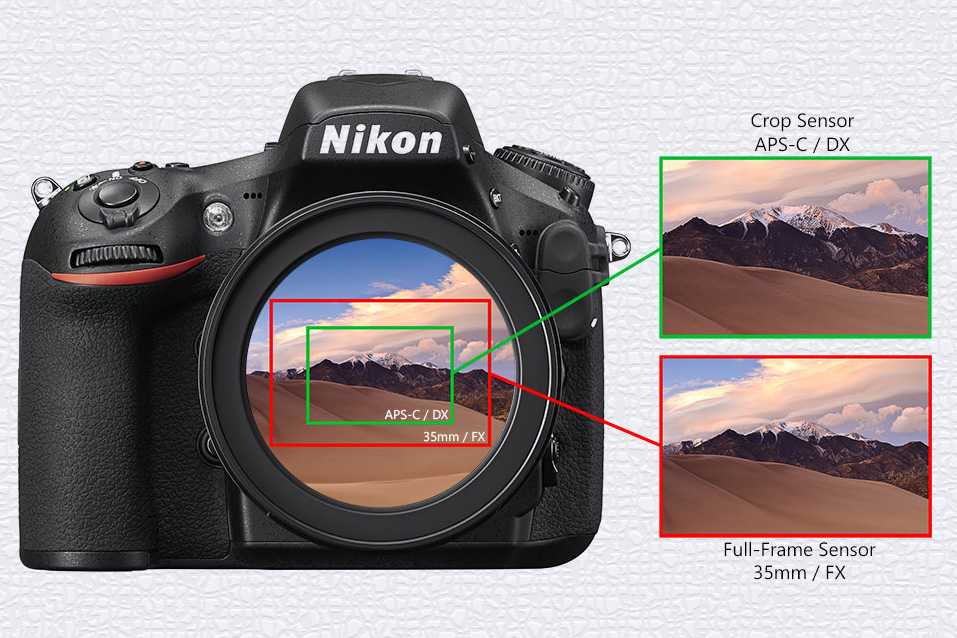
3. Стабилизатор изображения
Стабилизатор изображения призван бороться с так называемым эффектом «шевеленки» — вызванным дрожанием рук при фотографировании на достаточно больших выдержках или при большом зуме.
Варианты стабилизации:
Оптическая стабилизация. Основана на том, что в объектив встроен подвижный стабилизирующий элемент, который искривляет путь света в нужном направлении. Также в объективе есть сенсоры, которые управляют движением этого элемента. В результате, при незначительных колебаниях фотоаппарата, проекция картинки на матрицу всегда остается неподвижной. Впрочем, у нее есть и свои минусы:
Снижается светосила объектива,
Возрастает стоимость
Для своих объективов Canon разработала систему стабилизации Image Stabilizer (IS). У Nikon аналогичная система обозначается как VR.
Anti-shake. В данной технологии стабилизации, в отличие от оптической, подвижным элементом является сама матрица. Главный плюс этого подхода состоит в независимости стабилизации от объектива, соответственно такая стабилизация может работать с любой оптикой. Первой такую стабилизацию разработала Konica Minolta. Наиболее ярким примером наличия встроенного antishake является новинка от Sony — модель Alpha DSLR-A100.
Первой такую стабилизацию разработала Konica Minolta. Наиболее ярким примером наличия встроенного antishake является новинка от Sony — модель Alpha DSLR-A100.
4. Видоискатель
Видоискатель позволяет увидеть будущую картинку перед нажатием на спуск. В цифровых компактных камерах он может вовсе отсутствовать, его роль выполняет дисплей, на котором в реальном времени формируется изображение. Видоискатель может быть оптическим,
зеркальным и электронным.
Лучшим считается зеркальный видоискатель. Он позволяет увидеть реальную площадь кадра без искажений.
Оптический же видоискатель является просто сквозным отверстием в корпусе камеры и не соответствует тому что видит объектив, хотя бы потому, что смещен относительно него на некоторое расстояние, однако в этом случае на помощь фотографу приходит дисплей.
5. Дисплей фотоаппарата
На компактных цифровиках дисплей позволяет видеть картинку такой, какой она получится на фотографии и заранее увидеть недочеты в композиции, тенях, освещенности (некоторые фотоаппараты умеют показывать гистограмму будущего изображения в реальном времени). На зеркалках дисплей может служить для просмотра уже сделанных кадров. Также дисплей служит интерфейсом для управления фотоаппаратом, поэтому, чем он больше и ярче, тем лучше.
На зеркалках дисплей может служить для просмотра уже сделанных кадров. Также дисплей служит интерфейсом для управления фотоаппаратом, поэтому, чем он больше и ярче, тем лучше.
6. Вспышка.
Обычно каждый фотоаппарат снабжается встроенной слабомощной вспышкой, способной подсветить передний план. Также вспышки снабжаются различными функциями подавления эффекта красных глаз и т.п. В профессиональных и полупрофессиональных камерах также присутствует контакт для подключения внешней вспышки – горячий башмак. Внешние вспышки позволяют достичь гораздо лучших результатов во всех жанрах съемки.
7. Возможность ручных настроек
Немаловажным условием получения качественных фото является наличие в фотоаппарате ручных настроек. А именно, возможность регулировать диафрагму, регулировать выдержку, устанавливать баланс белого, изменять чувствительность матрицы и другие настройки.
Наличие этих регулировок позволяет в полной мере контролировать процесс съемки, ведь даже самый быстрый процессор камеры может не знать замысла фотографа.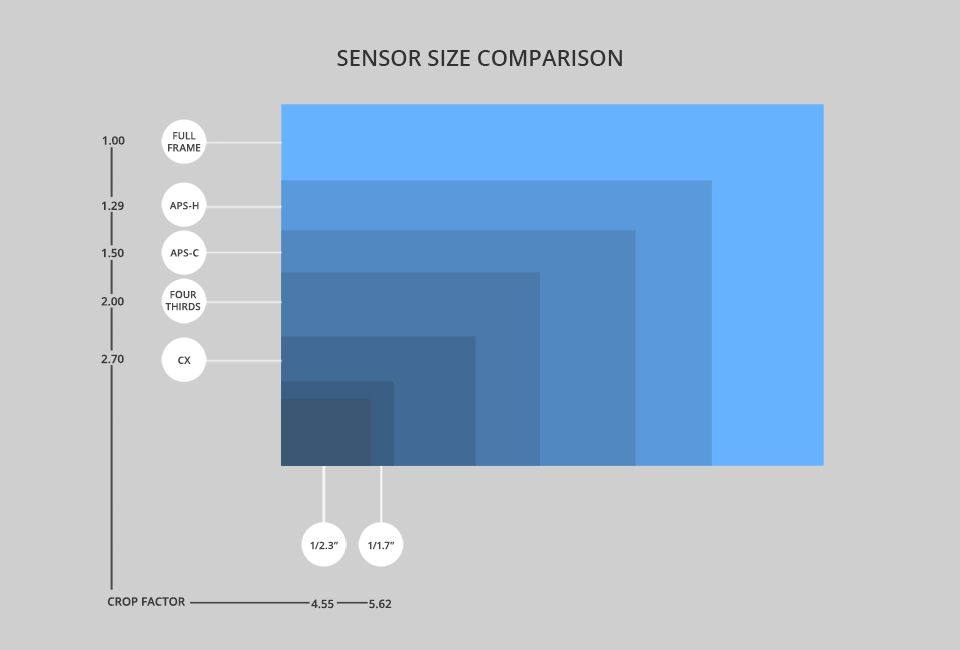
Камеры — основы оптотехники
Основы работы с камерами
Камера — это устройство дистанционного зондирования, которое может захватывать и сохранять или передавать изображения. Свет собирается и фокусируется через оптический система на чувствительной поверхности (сенсор), которая преобразует интенсивность и частоты электромагнитного излучения к информации, через химические или электронные процессы.
Простейшая система такого рода состоит из темной комнаты или ящика в
в который свет попадает только через маленькое отверстие и фокусируется на противоположном
стене, где его можно увидеть невооруженным глазом или зафиксировать на светочувствительном
материал (например, фотопленка). Этот метод визуализации, который восходит к
века, называется «камера-обскура» (лат. «темная комната») и дала
имя современным камерам.
Технологии камер значительно улучшились за последние десятилетия.
разработка устройства с зарядовой связью (CCD) и, совсем недавно, CMOS
технология.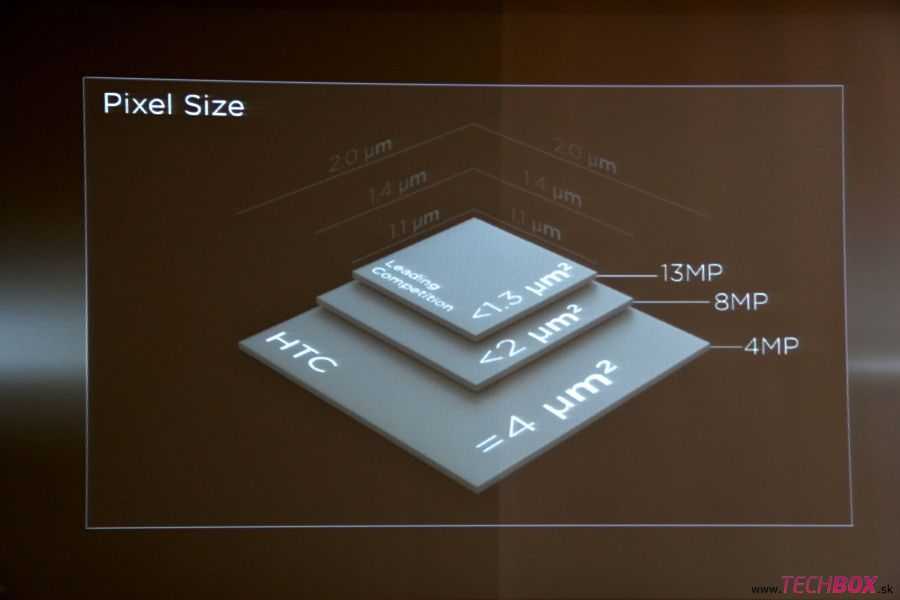 Предыдущие стандартные системы, такие как камеры с вакуумными трубками,
снято с производства. Улучшения в разрешении изображения и захвате
скорость, очевидно, также улучшила качество и скорость машинного зрения
камеры.
Предыдущие стандартные системы, такие как камеры с вакуумными трубками,
снято с производства. Улучшения в разрешении изображения и захвате
скорость, очевидно, также улучшила качество и скорость машинного зрения
камеры.
Размеры сенсора и разрешение
Важной характеристикой камеры является размер сенсора (или формат ):
это указывает на размеры датчика изображения и его форм-фактор.
Обычно этот параметр выражается в дюймах (и долях
дюймы). Однако фактические размеры датчика отличаются от
значение дроби, что часто вызывает недоумение у пользователей. Этот
практика восходит к 50-м годам во времена телевизионных трубок и является
все еще стандарт в эти дни. Обычные круглые трубки для видеокамер диаметром 1 дюйм.
имеют прямоугольную фоточувствительную область с диагональю около 16 мм, поэтому
цифровой датчик с размером диагонали 16 мм эквивалентен 1 дюйму.
Кроме того, всегда целесообразно проверить технические характеристики датчика, поскольку
даже два датчика одного формата могут немного отличаться
размеры и пропорции.
Пространственное разрешение количество активных элементов (пикселей), содержащихся в области сенсора: чем выше разрешение, тем меньше размер пикселя и, следовательно, тем мельче детали, которые можно обнаружить на изображении. Важно отметить, что датчики могут иметь одинаковые размеры, но разное разрешение, поскольку пиксель размер может варьироваться. Хотя для данного формата сенсора меньшие пиксели приводят к более высокое разрешение, меньшие пиксели не всегда идеальны, поскольку они менее чувствительны к свету и создают более высокий уровень шума; а еще объектив разрешение и размер пикселя всегда должны быть правильно согласованы, чтобы обеспечить оптимальная производительность системы.
Камеры с матричным и линейным сканированием
Камеры, используемые в приложениях машинного зрения, можно разделить на две части
группы: камеры с площадным сканированием (также называемые матричными камерами) и линейное сканирование
камеры. Первые проще и менее технически требовательны, в то время как
последние предпочтительнее в некоторых ситуациях, когда матричные камеры не
подходящее.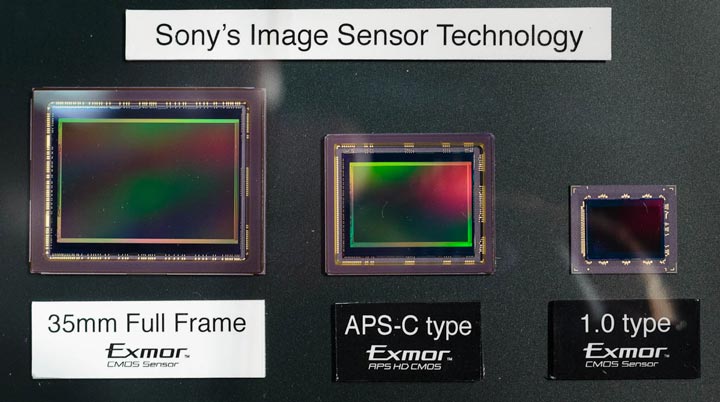 Камеры с областным сканированием захватывают 2D-изображения, используя определенное количество
активные элементы (пиксели), в то время как датчики камер линейного сканирования
характеризуется одним массивом пикселей.
Камеры с областным сканированием захватывают 2D-изображения, используя определенное количество
активные элементы (пиксели), в то время как датчики камер линейного сканирования
характеризуется одним массивом пикселей.
Типы датчиков: ПЗС и КМОП
КМОП и ПЗС — две наиболее важные и распространенные технологии на рынке датчиков изображения.
ПЗС (устройство с зарядовой связью) являются датчиками на основе на массиве пассивных фотодиодов, который интегрирует заряд во время время экспозиции камеры. Затем заряд переносится на общий электроника, которая считывает накопленные заряды разных пикселей и переводит их в напряжения.
Поскольку ПЗС является устройством с пассивными пикселями (т. е. без электроники на
уровень пикселей) квантовая эффективность очень высока: это преимущество
в приложениях, где свет довольно плохой. Кроме того, поскольку
электроника одинакова для всех пикселей (или, по крайней мере, для пикселей
того же столбца) может быть достигнута высокая однородность пикселей. На
с другой стороны, передача заряда происходит довольно медленно, что приводит к низкому кадру
скорости (обычно <20 кадров в секунду), а технология ПЗС-сенсоров не
стандарт, что делает их довольно дорогими.
На
с другой стороны, передача заряда происходит довольно медленно, что приводит к низкому кадру
скорости (обычно <20 кадров в секунду), а технология ПЗС-сенсоров не
стандарт, что делает их довольно дорогими.
КМОП (комплементарный металл-оксид-полупроводник) датчики на основе массива активных пикселей: уровень пикселей электроника (обычно 3 или 4 транзистора) переводит заряд накапливается в фотодиоде при определенном напряжении; в этом случае, выход каждого пикселя нужно только получить и сэмплировать.
Поскольку вывод пикселей зависит от напряжения (а не от заряда),
с датчиками CMOS можно достичь более высокой частоты кадров благодаря
упрощенная схема считывания и возможность определить интересующую область
(ROI) для приобретения. Эта схема считывания имеет недостаток
использовать более высокий шум из-за транзисторов считывания в каждом пикселе и
из-за так называемого фиксированного шума: неоднородность в
изображения из-за несоответствия между различными схемами пикселей.
Глобальный и скользящий затвор (CMOS).
С глобальным и скользящим затвором в литературе упоминается способ захвата и считывания изображения.
С рольставней схема считывания экспозиции время одинаково для всех пикселей датчиков (см. рисунок: длина голубых полосок одинакова для всех рядов матрица), но есть задержка между экспозицией одной строки и следующей.
Иными словами, эта архитектура является «последовательной»: считывание происходит сразу после времени экспозиции строки.
Эта схема дает изображение, которое не все захвачено одновременно,
а скорее немного сдвинуты во времени: это может быть проблемой в быстрых
приложение, требующее высокой частоты кадров.
Напротив, время экспозиции глобального затвора
датчики начинаются и заканчиваются одновременно (см. рисунок: в этом случае
все красные полосы выровнены). Таким образом, информация, предоставленная каждым
пиксель относится к тому же интервалу времени, в течение которого было получено изображение.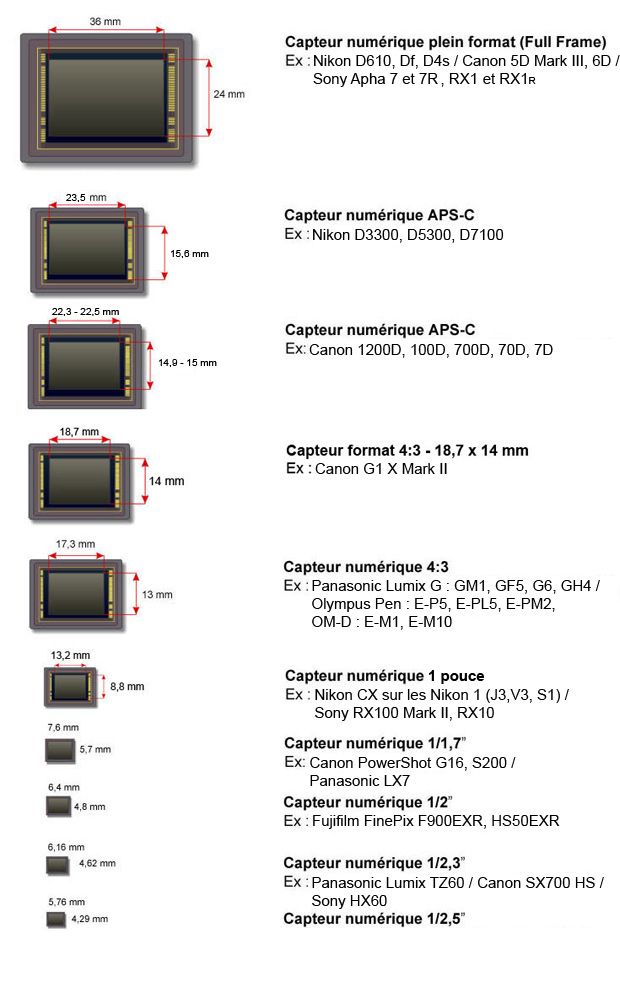 Здесь только считывание является последовательным, но измеренное напряжение относится к
один точный момент времени для всего массива. Датчик такого типа
обязательно для высокоскоростных приложений.
Здесь только считывание является последовательным, но измеренное напряжение относится к
один точный момент времени для всего массива. Датчик такого типа
обязательно для высокоскоростных приложений.
Монохромные датчики цвета VS
После процесса получения каждый пиксель изображения обеспечивает информация об уровне серого: обычно квантование основано на 256 оттенках серого. уровней (если разрешение 8 бит), 1024 уровня (10 бит) или 4096 (12 бит) немного).
Таким образом, изображение получается монохромным (черно-белым).
Для отображения цветного изображения необходимы как минимум 3 координаты: красная координата, зеленая координата и синяя координата. Эти 3 значения могут быть выражено так же, как и монохромное изображение, с диапазоном 256, 1024 или 4096 уровней для всех 3 каналов.
В следующем примере представлены некоторые цвета:
- Белый (R=255, G=255, B=255)
- Черный (0,0,0)
- Зеленый (0,255,0)
- Желтый ( 255,255,0)
- Фиолетовый (255,0,255)
Для получения информации о цвете необходимо выполнить два шага.
Первым шагом является размещение над всей матрицей датчиков цветного фильтра: наиболее распространенным является фильтр Байера (см. рисунок). Его типичный образец состоит из 50% зеленого пикселя , 25% красного пикселя и 25% синего пикселя , расположенных, как на рисунке выше.
Например, в зеленом пикселе только входящие лучи, чьи длина волны около 550 нм (т. е. зеленый свет) может проходить через фильтр слоя и может поглощаться датчиком (см. нижний рисунок).
Лучи с другой длиной волны отклоняются.
После сбора заряда вторым шагом является восстановление информация о цвете для всех пикселей: эта операция называется демозаика (или дебайеризация).
Например, пиксель P(3,2) содержит информацию только о синем цвете, поскольку его
цветной фильтр синий. Для получения также красной и зеленой координат
возможный выбор состоит в том, чтобы вычислить два значения путем усреднения ближайшего
красный и зеленый пиксель.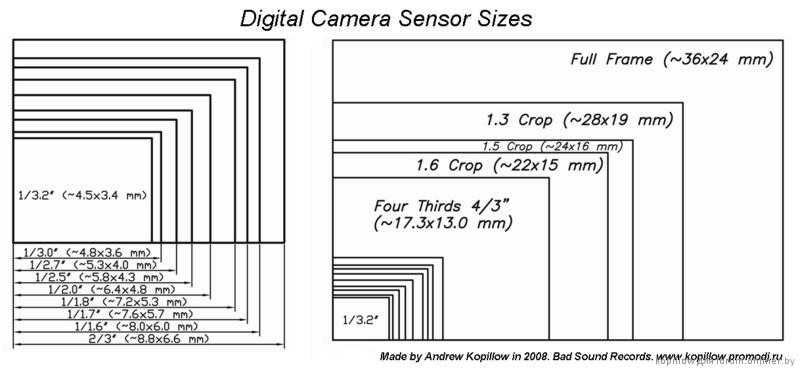
В этом случае красное значение будет равно:
`Red_(3,2)=(Red_(2,1)+Red_(2,3)+Red_(4,1)+Red_(4,3) ))/4`
И значение зеленого будет равно:
`Green_(3,2)=(Green_(2,2)+Green_(3,1)+Green_(3,3)+Green_( 4,2))/4`
При использовании большой маски для усреднения можно получить более точный цвет.
получается, но, с другой стороны, алгоритм будет тяжелее и,
следовательно, время обработки будет больше.
Подводя итог, какие параметры следует учитывать при выборе между монохромным и цветным датчиком?
- Датчик цвета необходим при работе с приложениями, в которых важна информация о цвете.
Очевидно, что если приложению требуется цветное изображение, единственным выбором является использовать датчик цвета (например, осмотр и контроль качества Приложения).
- Датчик цвета работает медленнее .
В то время как для монохромного датчика каждый пиксель обычно описывается 8
бит, для датчика цвета каждый пиксель имеет 8 бит для красного канала, 8 бит
для зеленого канала и 8 бит для синего канала, так что три раза
количество данных, подлежащих обработке, что приводит к более высокой обработке
время и, следовательно, более медленная частота кадров.
- Монохромный датчик может достигать более высокого разрешения .
В цветной камере наличие фильтра Байера может способствовать снижают производительность с точки зрения оптического разрешения системы. Кроме того, алгоритм демозаики также может вносить ошибки в реконструкция цвета.
Следовательно, если информация о цвете не требуется, предпочтение следует отдавать монохромному датчику.
Характеристики сенсора
Дефекты пикселей
Дефекты пикселей могут быть трех видов: горячие, теплые и битые пиксели. Горячий
пиксели — это элементы, которые всегда насыщаются (дают максимальный сигнал, например, полный
белый) в зависимости от интенсивности света. Битые пиксели ведут себя
наоборот, всегда давая нулевой (черный) сигнал. Теплые пиксели создают случайные
сигнал. Эти виды дефектов не зависят от интенсивности и
время экспонирования, чтобы их можно было легко удалить – напр. в цифровом виде
заменяя их средним значением окружающих пикселей.
Шум
Существует несколько типов шума, которые могут повлиять на реальный пиксель. зачитать. Они могут быть вызваны геометрическими, физическими и электронными факторами. факторов, причем они могут быть как случайными, так и постоянными. Некоторые из них представлены ниже:
- Дробовой шум является следствием дискретного природа света. Когда интенсивность света очень низкая — как это считается малая поверхность одного пикселя – относительное колебание число фотонов во времени будет значительным, точно так же, как вероятность орла или решки значительно далека от 50% при подбрасывании монета всего несколько раз. Это колебание и есть дробовой шум.
- Шум темнового тока вызвано электронами, которые могут быть случайно произведены тепловым эффект. Количество тепловых электронов, а также связанный с ними шум, растет с температурой и временем воздействия.
- Шум квантования
связано с преобразованием непрерывного значения исходного
(аналоговое) значение напряжения к дискретному значению обрабатываемого (цифрового)
Напряжение.

- Шум усиления вызван разницей в поведении разных пикселей (по чувствительности и коэффициенту усиления). Это пример «постоянного шума», который можно измерить и устранено.
Чувствительность
Чувствительность — это параметр, количественно определяющий реакцию датчика на свет. Чувствительность строго связана с квантовой эффективностью, т.е. доля фотонов, эффективно преобразованных в электроны.
Динамический диапазон
Динамический диапазон — это отношение между максимальным и минимальным сигналом который улавливается датчиком. На верхнем пределе пиксели кажутся белый для каждого более высокого значения интенсивности (насыщенности), в то время как пиксели кажутся черными на нижнем пределе и ниже.
Динамический диапазон обычно выражается логарифмом
минимальное-максимальное отношение, либо в базе 10 (децибелы), либо в базе 2 (удвоения или
остановки), как показано ниже. Человеческие глаза, например, могут различать объекты
как при свете звезд, так и в яркий солнечный день, что соответствует 90
дБ разница в интенсивности. Этот диапазон, однако, не может быть использован
одновременно, так как глазу нужно время, чтобы приспособиться к разному освещению
условия.
Этот диапазон, однако, не может быть использован
одновременно, так как глазу нужно время, чтобы приспособиться к разному освещению
условия.
ЖК-дисплей хорошего качества имеет динамический диапазон около 1000:1, а некоторые последние датчики CMOS имеют динамический диапазон около 23000:1. (зарегистрировано как 14,5 остановок).
SNR
SNR (отношение сигнал/шум) учитывает наличие шума, так что теоретическое самое низкое значение серого, определенное динамическим диапазоном, составляет часто невозможно достичь. SNR представляет собой отношение между максимальным сигналом и общий шум, измеренный в дБ. Максимальное значение для SNR составляет ограничено дробовым шумом (это зависит от физической природы света и это неизбежно) и может быть аппроксимировано как
`SNR_max = sqrt [«максимальная емкость насыщения в электронах одного пикселя»]`
SNR задает предел уровней серого, которые имеют смысл в изображении.
преобразование между аналоговым сигналом (непрерывным) и цифровым
(дискретный).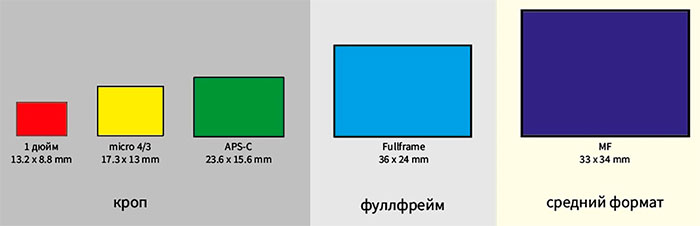 Например, если максимальное отношение сигнал-шум составляет 50 дБ, хорошим выбором будет
8-битный датчик, в котором 256 уровней серого соответствуют 48 дБ.
Например, если максимальное отношение сигнал-шум составляет 50 дБ, хорошим выбором будет
8-битный датчик, в котором 256 уровней серого соответствуют 48 дБ.
Использование датчика с более высоким уровнем серого означало бы регистрацию определенной степени чистого шума.
Спектральная чувствительность
Спектральная чувствительность – это параметр, характеризующий эффективность
интенсивность света регистрируется на разных длинах волн. Глаза человека имеют
три различных типа фоторецепторов, различающихся по чувствительности к
видимых длин волн, так что общая кривая чувствительности представляет собой
сочетание всех трех. Системы машинного зрения, обычно основанные на ПЗС
или CMOS камеры, обнаруживают свет от 350 до 900 нм, с зоной пика
быть между 400 и 650 нм. Различные виды датчиков также могут охватывать
УФ-спектр или, с другой стороны, ближний инфракрасный свет, прежде чем
переход на совершенно другую технологию для дальних длин волн, таких как
SWIR или LWIR.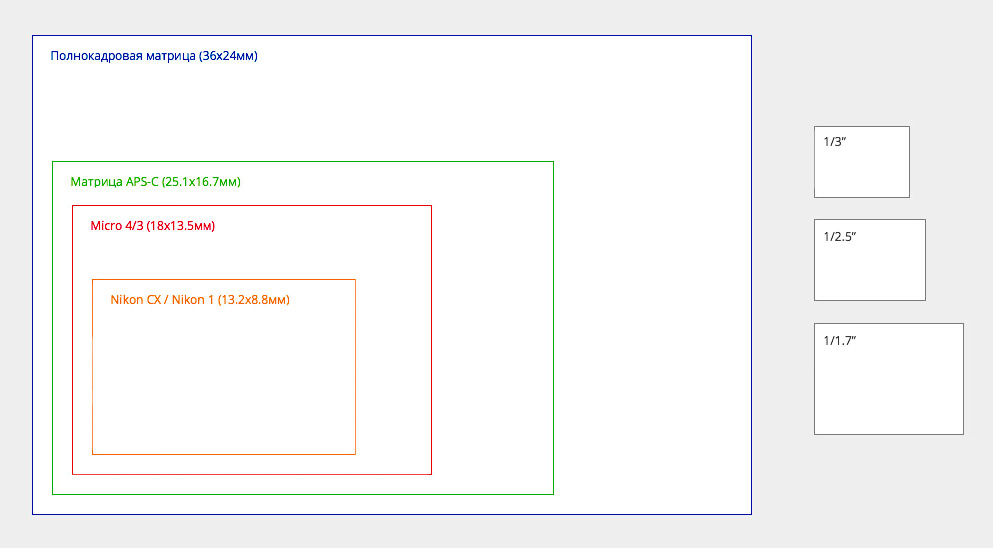
Микролинзы
Особенно на КМОП-сенсорах каждая активная область пикселя окружена и увенчаны схемой и металлическими соединениями, отвечающими за изображение зачитать. Это значительно уменьшает количество света, которое может быть успешно обнаружено. Если световые лучи не перпендикулярны поверхности сенсора еще хуже, так как они отражаются ближним соединения на металлических слоях сенсорного чипа.
Почти все современные датчики изображения покрыты массивом микролинзы. Эти линзы собирают падающий свет и фокусируют его на чувствительной области пикселя, тем самым увеличивая чувствительность сенсора.
Сдвиг микролинз
Обычно микролинзы центрируются над активной областью каждого пикселя независимо от их относительного положения на поверхности сенсора.
Однако некоторые датчики, особенно предназначенные для фото/
потребительский рынок, могут быть оснащены микролинзами, которые постепенно
смещается по мере того, как мы идем от центра к углу датчика.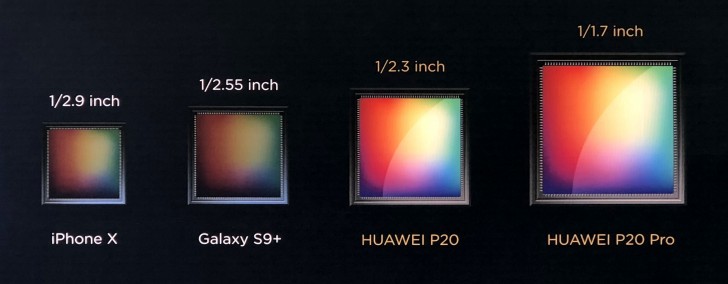 Это
необходимо для получения лучшей однородности чувствительности по датчику, когда
он используется с обычными объективами, которые не телецентричны на датчике
сторона. CRA находится под углом 0° в центре датчика и может достигать нескольких
градусов на его углу.
Это
необходимо для получения лучшей однородности чувствительности по датчику, когда
он используется с обычными объективами, которые не телецентричны на датчике
сторона. CRA находится под углом 0° в центре датчика и может достигать нескольких
градусов на его углу.
Микролинзы без смещения:
Микролинзы со смещением:
Поскольку эти датчики оптимизированы для нетелецентрических линз, они приводит к снижению производительности при использовании с телецентрическими объективами. Большинство явный эффект виньетирование, но и какие-то оптические аберрации может появиться.
Датчики с задней подсветкой
Как показано выше, схема, окружающая активную область пикселя
сильно снизить светочувствительность сенсора, только частично
компенсируется использованием микролинз. С последней режущей кромкой
Технология изготовления позволяет построить датчик в перевернутом виде
вниз. В этом процессе, после создания фотодиодов, транзисторов
и металлических межсоединений, микросхема переворачивается вверх дном и
механически полируется до прежнего «дна» кремниевого чипа
незащищенный. Таким образом, активная область пикселя находится в верхней части сенсора.
и ему больше не мешает схема считывания.
Таким образом, активная область пикселя находится в верхней части сенсора.
и ему больше не мешает схема считывания.
Различные параметры, описывающие характеристики и качества датчика собраны и последовательно описаны в EMVA стандарт 1288. Этот стандарт иллюстрирует основные параметры, которые должно быть дано, чтобы полностью описать реальное поведение датчика вместе с четко определенными методами измерения, чтобы получить эти параметры.
Стандартные параметры:
- Чувствительность, линейность сигнала в зависимости от интенсивности света и шума
- Темновой ток (температурная зависимость: опционально)
- Неоднородность сенсора и дефектные пиксели
- Спектральная чувствительность (опционально)
Параметры камеры
Время экспозиции — время, в течение которого свет
может достигать датчика. Чем выше это значение, тем выше
количество света, представленное на результирующем изображении. Увеличение
время выдержки — первое и самое простое решение, когда света недостаточно
но он не свободен от проблем: во-первых, шум всегда увеличивается с ростом
время контакта; Кроме того, при работе с движущимися объектами могут появляться эффекты размытия.
объекты. На самом деле, если время экспозиции слишком велико, объект будет
отпечатаны на нескольких разных пикселях, вызывая известный
Эффект «размытия движения». Кроме того, слишком длительное время экспозиции может привести к
передержка, а именно, когда количество пикселей достигает максимальной емкости
и поэтому кажутся белыми, даже если интенсивность света на каждом пикселе
на самом деле отличается. Наконец, длительное время экспозиции снижает максимальное
частота кадров достижима.
Увеличение
время выдержки — первое и самое простое решение, когда света недостаточно
но он не свободен от проблем: во-первых, шум всегда увеличивается с ростом
время контакта; Кроме того, при работе с движущимися объектами могут появляться эффекты размытия.
объекты. На самом деле, если время экспозиции слишком велико, объект будет
отпечатаны на нескольких разных пикселях, вызывая известный
Эффект «размытия движения». Кроме того, слишком длительное время экспозиции может привести к
передержка, а именно, когда количество пикселей достигает максимальной емкости
и поэтому кажутся белыми, даже если интенсивность света на каждом пикселе
на самом деле отличается. Наконец, длительное время экспозиции снижает максимальное
частота кадров достижима.
Частота кадров. Это частота, на которой
полное изображение захватывается датчиком, обычно выражается в кадрах
в секунду (fps). Понятно, что частоту кадров нужно подгонять под
применение: линия, проверяющая 1000 бутылок в минуту, должна иметь возможность
снимать изображения с минимальной частотой кадров 1000/60 = 17 кадров в секунду.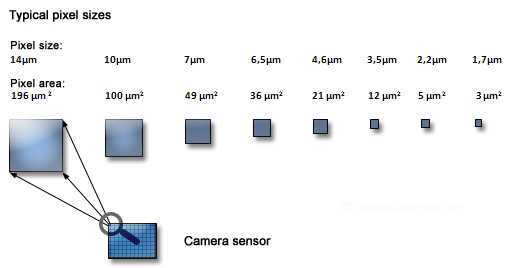
Запуск . Большинство камер дают возможность контролировать начало процесса приобретения, подстраивая его под применение. Типичная триггерная система — это система, в которой свет активируется вместе с получением изображения после получения ввода от внешнего устройства (например, датчика положения). Эта техника важно при съемке движущихся объектов, чтобы убедиться, что интересующие особенности находятся в поле зрения системы визуализации.
Коэффициент усиления в цифровой камере представляет собой способ увеличение количества сигнала, принимаемого датчиком изображения. Увеличение усиления означает также увеличение шума изображения, так что общее SNR останется неизменным.
Таким образом, увеличение усиления не повышает качество изображения! Так, усиление камеры должно использоваться как последнее средство для увеличения яркость (только когда пользователь не может работать с освещением, экспозицией время и F#).
Биннинг — это функция камеры, которая сочетает в себе
считывание соседних пикселей на датчике, обычно в строках/столбцах, больше
часто в квадратах 2 x 2 или 4 x 4.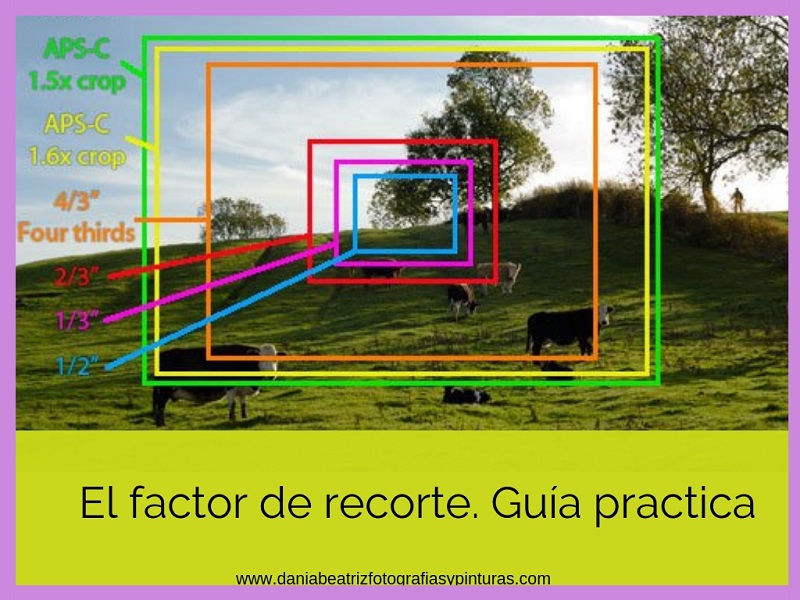 Хотя разрешение очевидно
снижается, улучшается ряд других характеристик. Например,
при биннинге 2х2 разрешение уменьшается вдвое, но чувствительность и динамика
радиус действия увеличивается в 4 раза (поскольку возможности каждого
потенциальные ямы суммируются), время считывания уменьшается вдвое (частота кадров удваивается)
и шум четвертуется.
Хотя разрешение очевидно
снижается, улучшается ряд других характеристик. Например,
при биннинге 2х2 разрешение уменьшается вдвое, но чувствительность и динамика
радиус действия увеличивается в 4 раза (поскольку возможности каждого
потенциальные ямы суммируются), время считывания уменьшается вдвое (частота кадров удваивается)
и шум четвертуется.
Таблица размеров сенсора цифровой фотокамеры
В следующей таблице представлены размеры сенсора цифровых зеркальных фотоаппаратов и телефонных камер, некоторые из которых основаны на оценке и предназначены только для справки.
Дизайн многих камер или телефонов ориентирован на спецификации Mega Pixel, т.е. MP. Однако именно размер сенсора камеры влияет на качество изображения. Датчик большего размера захватывает больше света, создавая более качественные фотографии, чем датчик меньшего размера. Вот почему полнокадровая зеркальная камера с 24-мегапиксельной камерой может иметь лучшее изображение, чем крошечный 1/2,5-дюймовый сенсор камеры телефона с более чем 100-мегапиксельной камерой.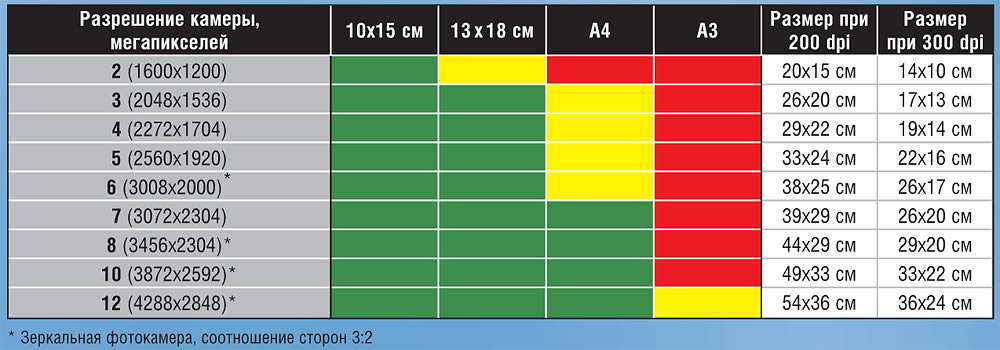
| Sensor Size | Diagonal | Area | Aspect Ratio | Remarks | |||||||||
| 1/4″ (~ 3.20 x 2.40 mm) | 4.00 mm | 7,68 мм² | 4: 3 | ||||||||||
| 1/3,6 ″ (~ 4 x 3 мм) | 5,00 мм | 12,00 мм² | 4: 3 | 12,00 мМ | 4: 3 | 12,00 мМ | 4: 3 | 12,00 мМ. 2,7 мм) | 5,12 мм | 9.9 mm2 | 4:3 | ||
| 1/3.4″ (~ 4.23 x 3.17 mm) | 5.29 mm | 13.41 mm² | 4:3 | ||||||||||
| 1/3.4″ (~ 4 x 3mm) | 5,04 мм | 12,2 мм2 | 4: 3 | IPhone Ultrawide (фактор 0,675) | |||||||||
| 1/3,2 ″ (~ 4,5 x 3,37 м. ММ) | |||||||||||||
| 1/3,2 ″ (~ 4,5 x 3,37 мм) | |||||||||||||
| 1/3.2 :3 | |||||||||||||
| 1/3″ (~ 4,8 x 3,6 мм) | 6,00 мм | 17.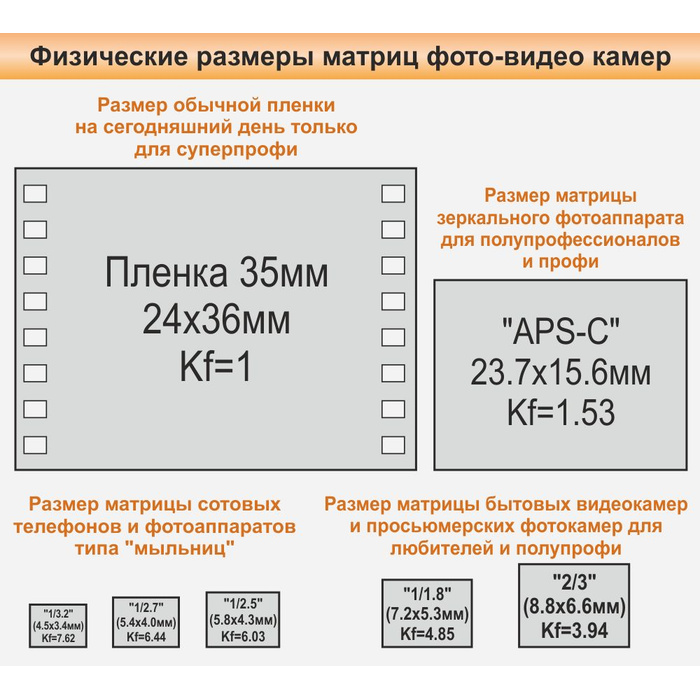 28 mm² 28 mm² | 4:3 | ||||||||||
| 1/2.9″ (~ 4.96 x 3.72 mm) | 6.20 mm | 18.45 mm² | 4:3 | ||||||||||
| 1/2.7″ (~ 5.33 x 4 mm) | 6.66 mm | 21.32 mm² | 4:3 | ||||||||||
| 1/2.55″ (~ 5.6 x 4.2 mm) Sony IMX363 | 7.05 mm | 23.87 mm2 | 4:3 | iPhone 12 Wide (коэффициент 0,708) | |||||||||
| 1/2,5″ (~ 5,76 x 4,29)mm) | 7.18 mm | 24.70 mm² | 4:3 | 1/2.5″ (Nokia Lumia 1520, Sony Cyber-shot DSC-T5, iPhone XS) | |||||||||
| 1/2.4″ (~ 5.90 x 4.43 mm) | 7.38 mm | 26.14 mm² | 4:3 | ||||||||||
| 1/2.35″ (~ 6.03 x 4.52 mm) | 7.54 mm | 27.26 mm² | 4:3 | ||||||||||
| 1 /2,33″ (~ 6,08 x 4,56 мм) | 7,60 мм | 27,72 мм² | 4:3 | ||||||||||
1/2.3″ (~ 6.16 x 4. 62 mm) 62 mm) | 7.70 mm | 28.46 mm² | 4:3 | ||||||||||
| 1/2″ (~ 6.4 x 4.8 mm) | 8.00 mm | 30,72 мм² | 4: 3 | ||||||||||
| 1/1,9 ″ (~ 6,85 x 5,14 мм) | ~ 8,56 мм | 35,19 мм 2 | 111111111194 | 492929292929292929291919191919191919191919191919191919199191919191991919191919919191919191991hN : | 1 | 111111194. | :194: 3,56 | ). | 1/1,9″ (~ 6,74 x 5,05 мм) | 8,42 мм | 34,04 мм² | 4:3 | |
| 1/1.8″ (~ 7.11 x 5.33 mm) | 8.89 mm | 37.90 mm² | 4:3 | ||||||||||
| 1/1.76″ (~ 7.27 x 5.46 mm) | 9.09 mm | 39.69 mm² | 4:3 | ||||||||||
| 1/1.75″ (~ 7.31 x 5.49 mm) | 9.14 mm | 40.13 mm² | 4:3 | ||||||||||
| 1/1.72 ″ (~ 7,44 x 5,58 мм) | 9,30 мм | 41,52 мм² | 4:3 | ||||||||||
1/1.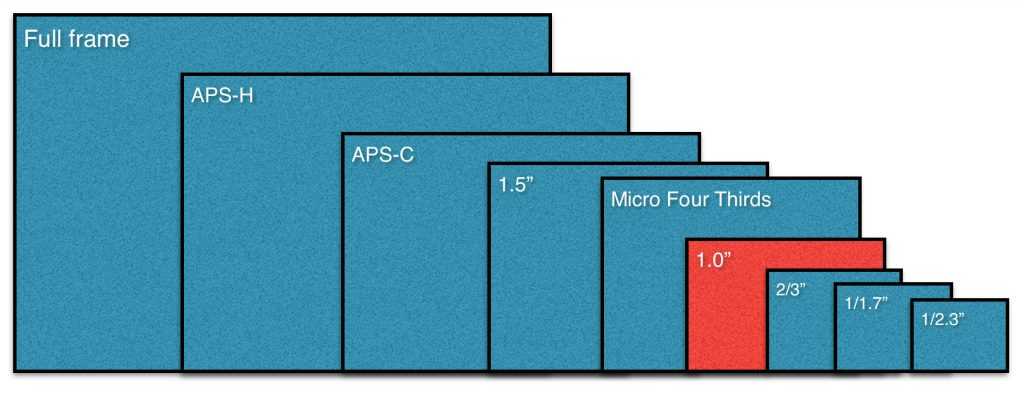 7″ (~ 7.53 x 5.64 mm) 7″ (~ 7.53 x 5.64 mm) | 9.41 mm | 42.47 mm² | 4:3 | ||||||||||
| 1/1.65″ (~ 7.76 x 5.81 mm) | 9.69 mm | 45.09 mm² | 4:3 | ||||||||||
| 1/1.63″ (~ 7.85 x 5.89 mm) | 9.81 mm | 46.24 mm² | 4:3 | ||||||||||
| 1/1.6″ (~ 8 x 6 мм) | 10,00 мм | 48,00 мм² | 4:3 | ||||||||||
| 1/1,56 ”(~ 8,2 x 6,15 мм) Sony IMX 766 Датчик | 10,26 мм | 50,5 мм2 | 4: 3 | SAMSUNG S22 Первичная оценка XIA 129000 9000 | SAMSUNG S22. 1.49″ (~8.2 x 6.1 mm) | 10.23 mm | 50.2 mm2 | 4:3 | Xiaomi 13 (factor 0.6) | ||||
| 8.64 x 6 mm | 10.52 mm | 51.84 mm² | 4: 3 | ||||||||||
| 2/3″ (~ 8,8 x 6,6 мм) | 11.00 mm | 58.08 mm² | 4:3 | ||||||||||
1/1.31″ (~ 6.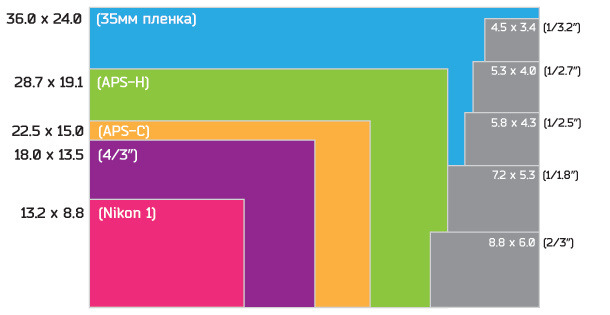 5 x 4.9 mm) 5 x 4.9 mm) | 8.1mm | 31.49 mm2 | 4:3 | Google Pixel 6 Pro | |||||||||
| 1/1.33″ (9.6 x 7.2 mm) | 12.00 mm | 69.12 mm² | 4:3 | Samsung Galaxy S20 Ultra Samsung Galaxy S21 Ultra | |||||||||
| 10.82 x 7.52 mm | 13,18 мм | 81,37 мм² | 4:3 | ||||||||||
| 1/1.2″ (10.67 x 8 mm) | 13.33 mm | 85.33 mm² | 4:3 | Nokia Pureview 808 | |||||||||
| 1/1.12″ (11.4 x 8.6 mm) | 14.48 mm | 98 mm² | ~4:3 | Xiaomi Mi 11 Ultra | |||||||||
| 12.8 x 9.6mm | 16 mm | 122.88 mm² | 4:3 | 1″ Digital Bolex d16 | |||||||||
| 1″ (13,2 x 8,8 мм) | 15,86 мм | 116.16 mm² | 3:2 | 1″ Nikon CX, Sony RX100 and RX10, Samsung NX Mini, Sharp Aquos R6 | |||||||||
14 x 9.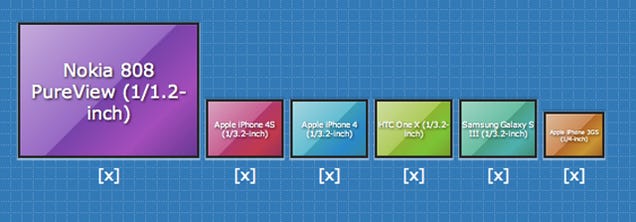 3 mm 3 mm | 16.80 mm | 130.20 mm² | 4:3 | ||||||||||
| Four Thirds (17.3 x 13 mm) | 21.64 mm | 224.90 mm² | 4:3 | Four Thirds System (MFT) | |||||||||
| 18.1 x 13.5 mm | 22.58 mm | 244.35 mm² | 4:3 | ||||||||||
| 1.5″ (~ 18.7 x 14 mm) | 23.36 mm | 261.80 mm² | 4:3 | ||||||||||
| 20.7 x 13.8 mm | 24.88 mm | 285.66 mm² | 4:3 | ||||||||||
| 21.5 x 14.4 mm | 25.88 mm | 309.60 mm² | 4:3 | ||||||||||
| 22.2 x 14.8 mm | 26.68 mm | 328.56 mm² | 4:3 | APS-C (Canon) | |||||||||
| 22,3 х 14,9mm | 26.82 mm | 332.27 mm² | 4:3 | APS-C (Canon) | |||||||||
| 22.4 x 15 mm | 26.96 mm | 336.00 mm² | 4:3 | ||||||||||
22. 5 x 15 mm 5 x 15 mm | 27.04 mm | 337.50 mm² | 4:3 | ||||||||||
| 22.7 x 15.1 mm | 27.26 mm | 342.77 mm² | 4:3 | ||||||||||
| 22.8 x 15.5 mm | 27.57 mm | 353.40 mm² | 4:3 | ||||||||||
| 23.1 x 15.4 mm | 27.76 mm | 355.74 mm² | 4:3 | ||||||||||
| 23 x 15.5 mm | 27.74 mm | 356.50 mm² | 4 :3 | ||||||||||
| 23.2 x 15.4 mm | 27.85 mm | 357.28 mm² | 4:3 | ||||||||||
| 23.3 x 15.5 mm | 27.98 mm | 361.15 mm² | 4:3 | ||||||||||
| 23.4 x 15.6 mm | 28.12 mm | 365.04 mm² | 4:3 | ||||||||||
| 23.5 x 15.6 mm | 28.21 mm | 366.60 mm² | 4:3 | ||||||||||
| 23.7 x 15.5 mm | 28.32 mm | 367. 35 mm² 35 mm² | 4:3 | ||||||||||
| 23.6 x 15.6 mm | 28.29 mm | 368.16 mm² | 4:3 | APS-C | |||||||||
| 23.5 x 15.7 mm | 28,26 мм | 368.95 mm² | 4:3 | ||||||||||
| 23.7 x 15.6 mm | 28.37 mm | 369.72 mm² | 4:3 | ||||||||||
| 23.6 x 15.7 mm | 28.35 mm | 370.52 mm² | 4:3 | ||||||||||
| 23.7 x 15.7 mm | 28.43 mm | 372.09 mm² | 4:3 | ||||||||||
| 23.6 x 15.8 mm | 28.40 mm | 372.88 mm² | 4:3 | ||||||||||
| 24 x 16 mm | 28.84 mm | 384.00 mm² | 4:3 | ||||||||||
| 27 x 18 mm | 32.45 mm | 486.00 mm² | 4:3 | ||||||||||
| 27.65 x 18.43 mm | 33.23 mm | 509.59 mm² | 4:3 | ||||||||||
27. 9 x 18.6 mm 9 x 18.6 mm | 33.53 mm | 518.94 mm² | 4:3 | ASP-H | |||||||||
| 28.7 x 18.7 mm | 34,25 мм | 536.69 mm² | 4:3 | ||||||||||
| 28.7 x 19.1 mm | 34.47 mm | 548.17 mm² | 4:3 | ASP-H (Canon) | |||||||||
| 35.6 x 23.8 mm | 42.82 mm | 847.28 mm² | 4:3 | ||||||||||
| 35.7 x 23.8 mm | 42.91 mm | 849.66 mm² | 4:3 | ||||||||||
| 35.8 x 23.8 mm | 42.99 mm | 852.04 mm² | 4:3 | ||||||||||
| 35.8 x 23.9 mm | 43.04 mm | 855.62 mm² | 4:3 | ||||||||||
| 35.9 x 23.9 mm | 43.13 mm | 858.01 mm² | 4:3 | ||||||||||
| 36 x 23.9 mm | 43.21 mm | 860.40 mm² | 4:3 | ||||||||||
| 35.9 x 24 mm | 43. Размер матрицы фотоаппарата: Размер матрицы. Что это такое?
|