Размер пикселя и разрешение матрицы цифровой камеры
Принимая решение, какую купить цифровую камеру для телескопа или цифровую камеру для микроскопа, Вы можете заметить, что в описании их технических характеристик указан такой параметр как размер пикселя. Давайте разберемся, за что отвечает данная величина, и какой цифровой камере в таком случае следует отдать предпочтение.
Прежде всего, считаем, что нужно дать определение термину «пиксель». Понятие пиксель происходит от английского словосочетания picture element, что в переводе означает «элемент изображения». Так, говоря о пикселях, мы имеем в виду точки, образующие изображение на экране монитора. И отметим, что в формировании снимка, сделанного цифровой камерой, может участвовать даже несколько миллионов подобных точек.
А теперь давайте выясним, на что влияет размер этой точки, т.е. пикселя. От физического размера пикселя зависит количество собираемого им света. Поэтому чем крупнее пиксель, тем, соответственно, больше его площадь, а, значит, и количество собранного света. Таким образом, получаем, что чем больше физический размер пикселя, тем выше светочувствительность матрицы и лучше соотношение сигнал/шум.
Поэтому чем крупнее пиксель, тем, соответственно, больше его площадь, а, значит, и количество собранного света. Таким образом, получаем, что чем больше физический размер пикселя, тем выше светочувствительность матрицы и лучше соотношение сигнал/шум.
Также заметим, что цифровые компактные фотоаппараты, которые часто еще называют мыльницами или цифромыльницами, при одинаковом количестве пикселей имеют гораздо меньшие размеры матрицы, чем обычные цифровые камеры. По этой причине мы получаем меньшие физические размеры пикселей на матрицах цифромыльниц. Таким образом, мы видим, что размеры пикселей оказывают существенное влияние на качество получаемого изображения, количество шумов и динамический диапазон. Отметим, что в пленочной фотографии шумы также еще могут называть «вуалью».
Так от физического размера пикселей зависит:
- Количество информации, попадающей на него
- Динамический диапазон матрицы
- Шумы
Нельзя ожидать, что решив купить цифровую камеру для телескопа или микроскопа с небольшим физическим размером матрицы и большим количеством пикселей, Вы получите качественный снимок.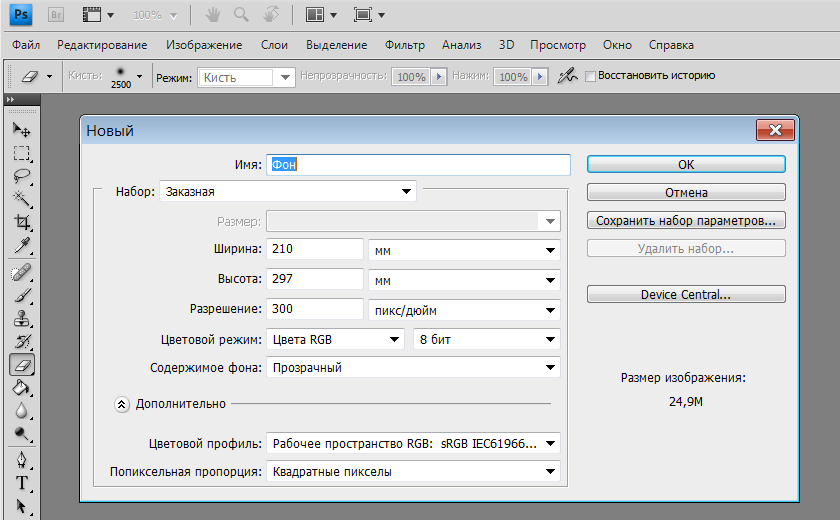
Следует понимать, что чем меньшие размеры пикселя матрицы цифровой камеры, тем раньше проявляется дифракция, и получаемое изображение начинает мылить (собственно, отсюда и происходит название «мыльница»).
Сегодня производители цифровых камер предлагают цифровые камеры с разрешением, которое может достигать даже десятков миллионов пикселей. Чем большее количество пикселей указано в технических параметрах цифровой камеры для микроскопов и телескопов, тем большим будет разрешение матрицы цифровой камеры, а, следовательно, тем выше будет детализация полученного снимка.
Вывод:
Итак, при выборе цифровой камеры для микроскопа или телескопа рекомендуем Вам учитывать, что:
- Чем больше физический размер пикселя, => тем большее количество информации на него попадает, и тем больше будет динамический диапазон матрицы, и меньше будут сказываться шумы.
-
Чем выше разрешение матрицы, => тем более четкое и детализированное изображение Вы получите и, тем большего размера фотографию будет возможно напечатать без ощутимой потери качества.

Автор статьи: Галина Цехмистро
← Настройка камеры для микроскопа. Видеоурок. Часть 1. | Матрица цифровой камеры. Типы и размер матриц →
53. Изменение разрешения изображения с размера
Эта страница еще не переведена. Следующий текст создан с помощью автоматического перевода.
53. Изменение разрешения изображения с размера
Изменение разрешения изображения является необходимой «на экранах», то есть, при разноске окончательный иллюстрации на веб-сайты социальных сетей и «для печати», то есть, для печати окончательный иллюстрации.
Во-первых мы будем смотреть на разрешение для экранов.
От①окно выбора инструмента, выберите②Холст инструмент.
Выберите①Размер.
Включите①Сохранять пропорции.
Изменение разрешения для экранов может быть сделано путем выбора②Пикселей.
Для экранов вы будет изменять количество пикселей (px), вместо dpi.
Изменения③Ширина (в пикселях) от 768 до 50. Как только вы закончите, нажмите на④✓для завершения.
Параметр количество пикселей по значительно более низкой резолюции ухудшает качество изображения.
Если вы уменьшаете количество пикселей, вы получите больше максимального предела слой. Как только вы достигаете ваш максимальный слой, попробуйте уменьшить количество пикселей. Кроме того уменьшение размера холста может помочь вам работать быстрее и сделать файлы занимают меньше места на вашем устройстве. Теперь вы можете настроить размер экрана с количество пикселей (px), а не с ДОИ.
Далее мы рассмотрим настройки разрешения для печати.
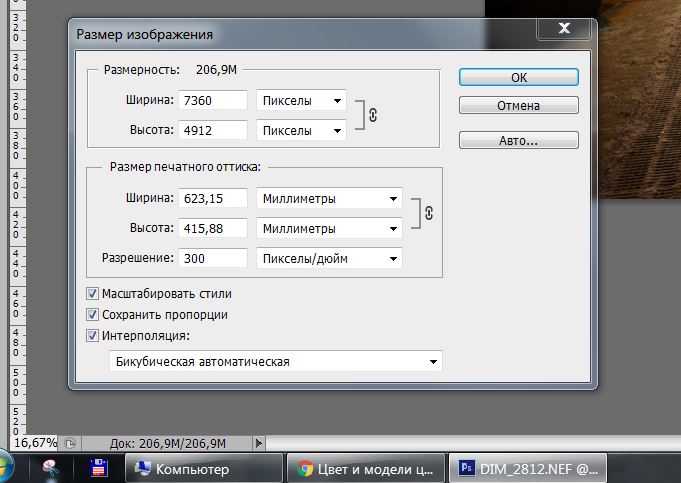
Для произведения, которую вы хотите напечатать можно изменить размер холста в мм и разрешение (dpi). Значение dpi минимум 300 для чистого печатных результатов. ДОИ относится к точек на дюйм (25,4 мм).
※Предупреждение: при запросе типографии для печати изображений, убедитесь быть в курсе ваших ДОИ и размер. Это чрезвычайно трудно впоследствии изменить ДОИ.
Это чрезвычайно трудно впоследствии изменить ДОИ.
Включите①Сохранять пропорции. Изменение разрешения для иллюстрации печати может быть сделано, сначала выбрав②Печать.
В печати выберите dpi. Отрегулируйте③ДОИ
После того как вы сделали новое значение, нажмите на④✓для завершения.
Уменьшение количества точек на дюйм, как показано будет ухудшаться качество изображения.
Далее мы рассмотрим метод расчета сокращения.
Включите①Сохранять пропорции. Задайте размер:②Width(px) от 768 до 150.
Нажмите③Линейные, чтобы выбрать метод расчета из выборки, линейной и Trilinear.
Это изображение сравнения.
Слева направо качество изменяется от низких до средних и высоких. Как правило, мы предлагаем выбор Trilinear (так как Trilinear использует аппаратные функции, он может не применяться в некоторых устройствах).
Далее мы рассмотрим метод расчета масштаба.
Включите①Сохранять пропорции.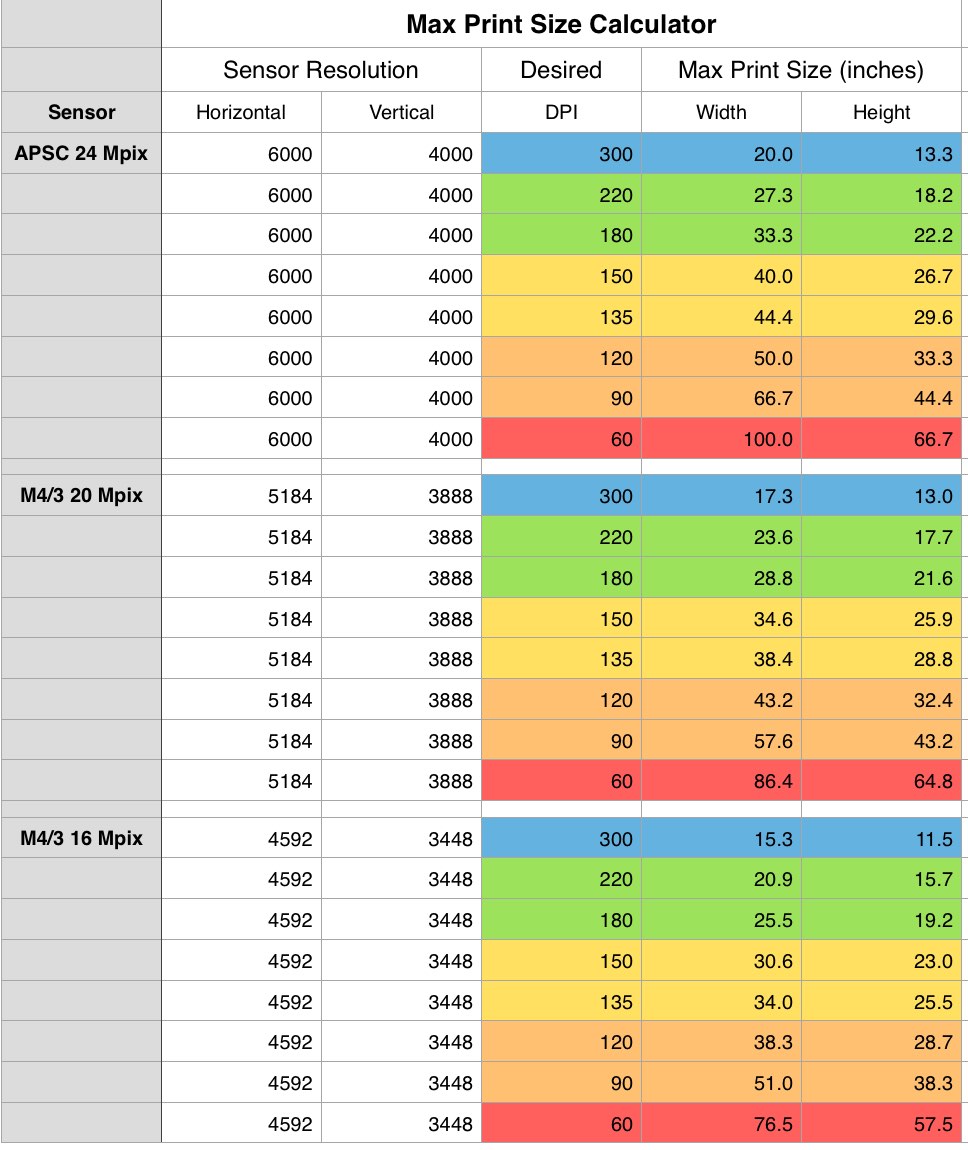 Задайте размер:②Ширина (в пикселях) от 50 до 1500. Нажмите
Задайте размер:②Ширина (в пикселях) от 50 до 1500. Нажмите
Вот сравнение качества изображения между полотнами, обрабатываемые ближайшего соседа и линейный. Как правило лучше выбрать линейный.
- ≪Prev.
- 54. Текстура с материала инструмента ≫
Размер пикселя камеры и сбор фотонов — Oxford Instruments
Одной из тенденций, наблюдаемых в последние годы в микроскопии, был интерес к датчикам изображения с большими полями зрения и меньшими размерами пикселей для сохранения детализации изображения при работе с меньшим увеличением. например 20х. Но всегда ли меньшие пиксели лучше, или все же есть условия, при которых более крупные пиксели выгодны? В этой статье мы рассматриваем размер пикселя и полезность больших размеров пикселя, и если да, то где это может применяться.
Роль пикселя
Роль пикселя в датчике состоит в том, чтобы собирать фотоны в пределах части области изображения и затем преобразовывать их в электрический сигнал. Оцифровывая эти сигналы, можно воссоздать изображение из значений, полученных в каждом пикселе. Чем эффективнее сбор света и преобразование этого света в электрический сигнал, тем более чувствительным может быть детектор. Это было ключевой движущей силой сенсорных технологий CCD и CMOS, а такие процессы, как задняя подсветка и использование микролинз, являются примерами способов повышения эффективности этих устройств. Последние доступные датчики имеют квантовую эффективность, достигающую 95%, т.е. 95% входящих фотонов, преобразуются в электроны в фоточувствительной области кремния по сравнению с устройствами чуть более 10 лет назад, ограниченными примерно 60% пикового QE.
Оцифровывая эти сигналы, можно воссоздать изображение из значений, полученных в каждом пикселе. Чем эффективнее сбор света и преобразование этого света в электрический сигнал, тем более чувствительным может быть детектор. Это было ключевой движущей силой сенсорных технологий CCD и CMOS, а такие процессы, как задняя подсветка и использование микролинз, являются примерами способов повышения эффективности этих устройств. Последние доступные датчики имеют квантовую эффективность, достигающую 95%, т.е. 95% входящих фотонов, преобразуются в электроны в фоточувствительной области кремния по сравнению с устройствами чуть более 10 лет назад, ограниченными примерно 60% пикового QE.
Рис. 1. Современные форматы датчиков обеспечивают высокую чувствительность за счет сочетания высокой эффективности сбора и преобразования фотонов и малошумящей электроники. На этом рисунке показан датчик с задней подсветкой, в котором схема находится под светочувствительной областью и, таким образом, не блокирует попадание света в область, в которой фотоны могут преобразовываться в электроны.
Какое влияние на изображение оказывает размер пикселя?
Развитие дизайна и производства сенсоров позволило размещать в сенсорах все более мелкие пиксели. Хотя большее количество пикселей может быть лучше, существуют компромиссы, поэтому размер пикселя должен быть сбалансирован в соответствии с потребностями приложения. Есть три основных аспекта того, как размер пикселя может повлиять на изображение, в дополнение к достижениям в других улучшениях сенсорных технологий, таких как заднее освещение. Они приведены в таблице 1:
| Параметр датчика | Параметр изображения | Описание |
| Эффективность сбора фотонов | Сигнал/шум | Чем чувствительнее датчик, тем больше информации нижнего уровня можно получить. В этом может заключаться разница между обнаружением сигнала и его отсутствием. Датчик с высокой способностью сбора фотонов поможет собрать больше сигнала, который усилит сигнал по сравнению с шумом самого датчика. |
| Выборка изображения «Разрешение» | Деталь изображения | Разрешение— это способность различать два объекта по их рисунку Эйри. Разрешение строго определяется тем, что возможно через микроскоп с помощью уравнения Рэлея: 0,61 x длина волны/объективная числовая апертура. Детектор изображения должен иметь достаточную выборку изображения, чтобы соответствовать критериям Найквиста и поддерживать это разрешение и, следовательно, детализацию изображения. |
| Глубина скважины | Динамический диапазон | Динамический диапазон — это диапазон между самым низким и самым высоким уровнями сигнала в пределах одного изображения. Динамический диапазон датчика может быть получен из глубины скважины датчика, деленной на уровень шума. Это предполагает, что датчик, поддерживающий электронную конструкцию, оптимизирован для работы с потенциальным динамическим диапазоном и делает это в линейной зависимости, т. е. конструкции с битовой глубиной и усилителем | .
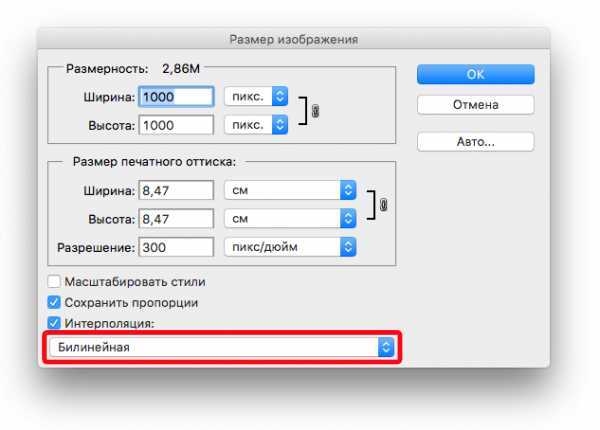
Таблица 1: Параметры датчика, связанные с размером пикселя и отношением к изображению
Согласование размеров пикселей с полем зрения микроскопа и поддержание разрешения более подробно обсуждаются в статье Оптимизация поля зрения и разрешения для микроскопии. В следующих разделах мы сосредоточимся на размере пикселя и эффективности сбора фотонов.
Размер пикселя и эффективность сбора фотонов
В таблице 2 мы можем увидеть размеры пикселя ряда доступных на рынке высокопроизводительных датчиков изображения, которые можно использовать для микроскопии:
| Датчики | Камера | Размер пикселя (мкм) | Площадь пикселя (мкм 2 ) | Разница в области сбора фотонов пикселей |
| КМОП | КМОП с задней подсветкой | 4,6 | 21,2 | 1x |
sCMOS с передней подсветкой напр. Зила 4. 2ПЛЮС 2ПЛЮС |
6,5 | 42,25 | 2x | |
|
sCMOS с задней подсветкой например Сона-6 |
6,5 | 42,25 | 2x | |
| sCMOS с задней подсветкой напр. Сона-11 | 11 | 121 | 5,7x | |
| EMCCD | EMCCD с задней подсветкой напр. ИКсон 888 | 13 | 169 | 8x |
| EMCCD с задней подсветкой напр. ИКсон 897 | 16 | 256 | 12x | |
| ПЗС | ПЗС с тыловой подсветкой напр. иКон-М | 13 | 169 | 8x |
| ПЗС с задней подсветкой напр. iKon-L | 13,5 | 182,25 | 8,6 |
Таблица 2: Области сбора фотонов для каждого пикселя для различных моделей камер
Как правило, датчики CMOS имеют меньший размер пикселя, чем датчики EMCCD и CCD. Архитектура датчика CMOS также обеспечивает более высокую скорость и больший размер датчика, чем конструкции на основе CCD. Эти качества подходят для общих приложений флуоресцентной визуализации, обеспечивая хорошую детализацию изображения при обычном увеличении для исследований клеточной биологии, и сделали sCMOS доминирующей технологией обнаружения для многих микроскопистов.
Архитектура датчика CMOS также обеспечивает более высокую скорость и больший размер датчика, чем конструкции на основе CCD. Эти качества подходят для общих приложений флуоресцентной визуализации, обеспечивая хорошую детализацию изображения при обычном увеличении для исследований клеточной биологии, и сделали sCMOS доминирующей технологией обнаружения для многих микроскопистов.
Несмотря на распространение sCMOS-детекторов, EMCCD- и CCD-детекторы остаются лучшим вариантом для некоторых из самых сложных приложений обработки изображений, и это, похоже, сохранится в течение некоторого времени:
• В камерах EMCCD используется электронное умножение для эффективного устранения шума считывания. Эта уникальная особенность делает эту сенсорную технологию идеальной для проведения точных количественных измерений вплоть до одного фотона, таких как визуализация отдельных молекул, а также для конфокальной визуализации живых клеток и систем сверхвысокого разрешения.
• ПЗС-камеры с глубоким охлаждением имеют на несколько порядков меньший темновой ток, чем КМОП-камеры, что делает их идеально подходящими для экспериментов по люминесценции с длительной выдержкой, которые ограничены темновым током, а более медленное считывание ПЗС не имеет значения.
Большой размер пикселей этих камер EMCCD и CCD также играет важную роль в том, почему они по-прежнему подходят для этих сценариев обработки изображений. Когда сбор фотонов является приоритетом, более крупный пиксель эффективно действует как большая область охвата фотонов, передавая больше сигнала на датчик. Вот почему последние разработки датчиков EMCCD имеют размеры пикселя в диапазоне 13-16 мкм, которые изначально подходят для сбора фотонов при большом увеличении, например. 100x. Обратите внимание, что доступны камеры EMCCD с меньшим размером пикселя, но они не получили никакого распространения на рынке, поскольку не обеспечивают преимуществ применения по сравнению с EMCCD с большими пикселями или опциями камеры sCMOS. На следующем рисунке у камеры iXon Ultra 888 EMCCD собственная площадь пикселей в 4 раза больше, чем у типичной камеры sCMOS, и в 8 раз больше, чем у датчика CMOS.
Рис. 2. В камерах EMCCD и CCD используются пиксели большого размера для получения преимуществ за счет превосходной эффективности сбора фотонов и повышения вероятности обнаружения фотонов.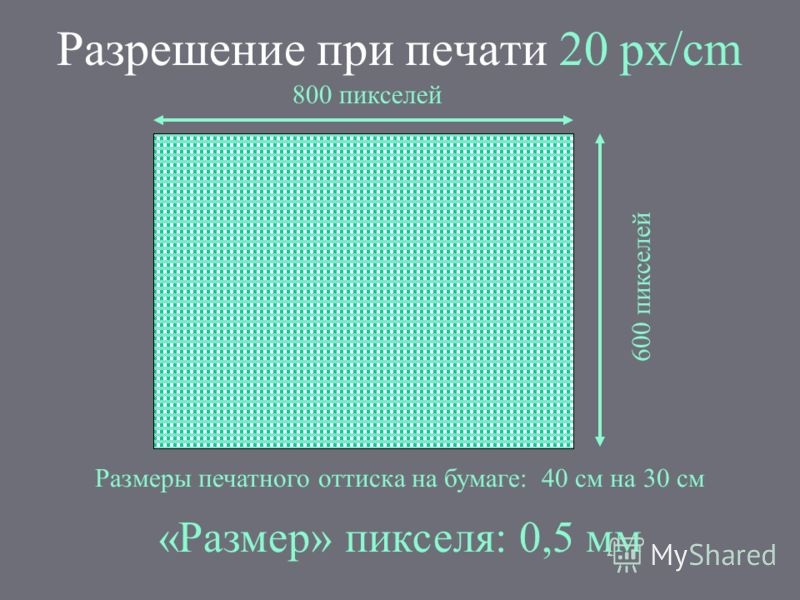 Этот пример иллюстрирует относительные размеры пикселей 13 мкм, 6,5 и 4,6 мкм.
Этот пример иллюстрирует относительные размеры пикселей 13 мкм, 6,5 и 4,6 мкм.
Как насчет форматов sCMOS-сенсоров с большими пикселями?
Некоторые sCMOS-камеры с задней подсветкой имеют размер пикселя 11 мкм, что является относительно большим пикселем по сравнению с типичными CMOS-камерами. Эти модели камер, такие как серия Sona-11 sCMOS, могут использовать светосилу, в 3 раза превышающую размер пикселя 6,5 мкм, который обычно используется в sCMOS-камерах.
Для некоторых приложений, таких как обнаружение отдельных молекул и для большого увеличения, sCMOS-камеры с более крупными пикселями, такие как Sona-11, могут предложить некоторые преимущества:
- Более высокая чувствительность по сравнению с sCMOS-камерами с меньшими пикселями и поле зрения
- Более высокая скорость при большем поле зрения и увеличенная выборка изображения по сравнению с камерами EMCCD.
Однако для более сложных экспериментов с отдельными молекулами большего размера пикселя и высокого QE не всегда достаточно.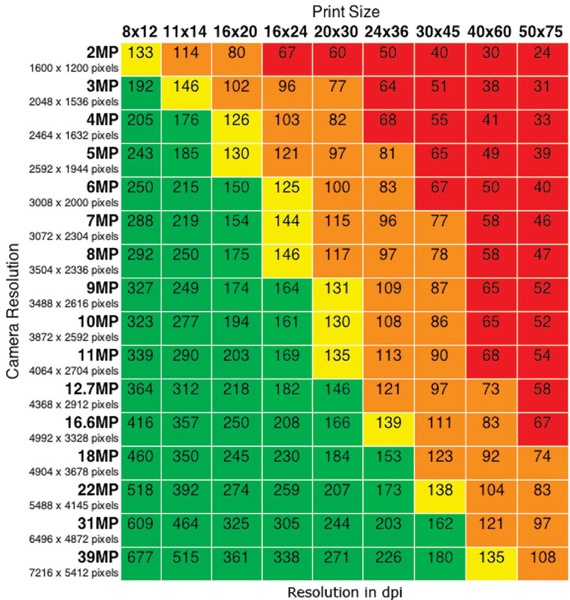 Процесс умножения электронов, уникальный для датчиков EMCCD, многократно усиливает сигнал перед считыванием, поэтому сигнал намного превышает минимальный уровень шума считывающей электроники камеры, и на практике доказано, что он работает на фотонных уровнях ниже того, что возможно для любой КМОП-технологии
Процесс умножения электронов, уникальный для датчиков EMCCD, многократно усиливает сигнал перед считыванием, поэтому сигнал намного превышает минимальный уровень шума считывающей электроники камеры, и на практике доказано, что он работает на фотонных уровнях ниже того, что возможно для любой КМОП-технологии
Сравнение сигнала и шума
Здесь мы сравниваем 2 камеры с одинаковыми факторами (QE, шум считывания, темновой ток), за исключением размера пикселя, и сравниваем влияние размера пикселя на отношение сигнала к шуму при освещении данная освещенность приходится на каждый датчик.
| Камера | Размер пикселя (мкм) | Площадь пикселя (мкм) | Сигнал (фотоны) | Шум |
| 1 | 6,5 | 42,25 | 10 | 2 |
| 2 | 13 | 169 | 40 | 2 |
Таблица 3: Упрощенное сравнение сигнала с шумом для иллюстрации увеличения компонента сигнала, обеспечиваемого размером пикселя.
В самом простом сравнении камера 2 должна обеспечивать значительно более высокое отношение сигнал/шум, поскольку составляющая сигнала увеличивается для каждого пикселя. Чтобы рассмотреть соотношение сигнал/шум для камер формирования изображения, нам необходимо использовать следующее уравнение отношения сигнала к шуму для моделирования различных задействованных компонентов сигнала и шума:
Используя эту информацию, мы можем построить график отношения сигнал-шум к количеству фотонов, учитывая интенсивность освещения над датчиком, выражая количество фотонов на основе площади – в этом примере мы выразим на 13 мкм 2 площади датчика:
Рис. 2. Сравнение влияния размера пикселя на соотношение сигнал-шум двух датчиков со всеми одинаковыми факторами, кроме размера пикселя, с падающим светом и фотонами, нормированными на 13 мкм.
Из этого мы видим, что более крупный пиксель действительно обеспечивает более высокое соотношение сигнал-шум — примерно в 2,5 раза выше при 10 фотонах на 13 мкм 2 .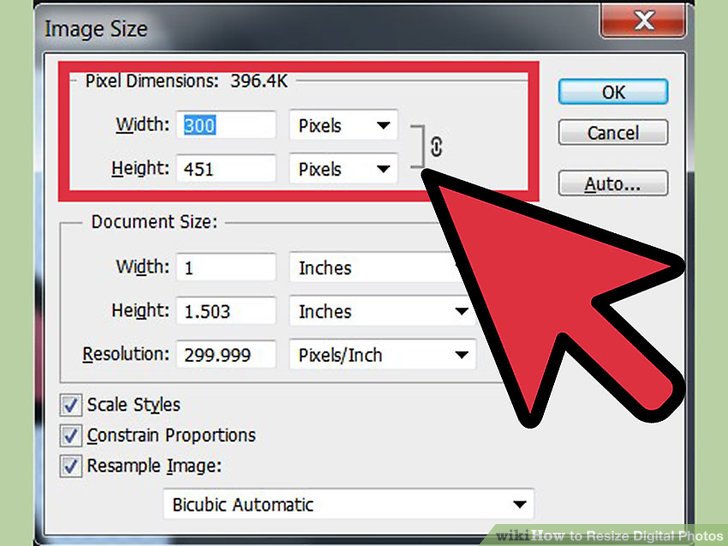 Это приведет к следующим преимуществам:
Это приведет к следующим преимуществам:
- Улучшенная чувствительность – более низкий предел обнаружения
- Более высокая достоверность данных при низких уровнях сигнала
- Уменьшите экспозицию при более обильном освещении, что полезно для многих исследований живых клеток.
Затем мы можем применить это к примерам реальных камер:
Рис. 3. Камеры, разработанные для обеспечения чувствительности и максимально возможного соотношения сигнал-шум, имеют большие размеры пикселей. Освещенность скорректирована на размер пикселя путем нормализации на площадь 13 мкм.
В сравнении, показанном на рис. 3, мы видим, что камеры с большими пикселями обеспечивают лучшее соотношение сигнал-шум, например модели iXon Ultra 888 и Sona-11, что соответствует их предполагаемым приложениям, в которых приоритет отдается чувствительности и обнаружению, а не пространственное разрешение при низком уровне освещенности. Другие модели CMOS с меньшими пикселями не обеспечивают такого высокого отношения сигнал/шум, даже несмотря на низкий уровень шума.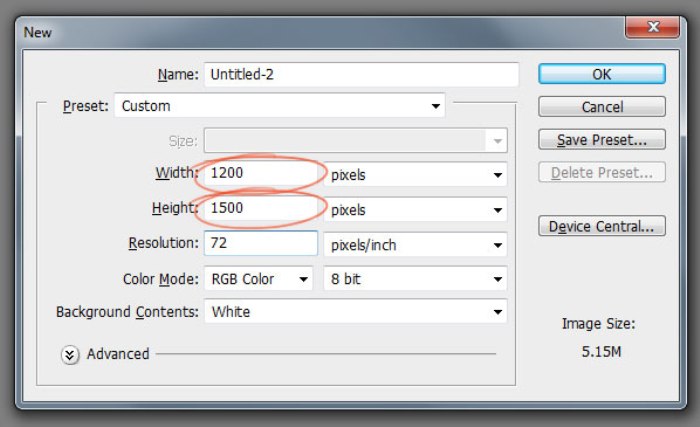 Они обеспечат улучшенное пространственное разрешение.
Они обеспечат улучшенное пространственное разрешение.
Можно ли использовать биннинг пикселей для увеличения соотношения сигнал-шум для КМОП-сенсоров с малыми пикселями?
Меньшие пиксели могут быть объединены в группы, при этом сигнал в нескольких пикселях может быть объединен вместе для увеличения общего уровня сигнала. Типичным примером может быть биннинг 2×2, при котором сигнал группируется для 4 пикселей вместе, как показано на рисунке 3. Это эффективно работает для ПЗС, повышая скорость и чувствительность, поскольку последовательный характер ПЗС позволяет добавлять значение каждого пикселя до того, как будет обнаружен шум считывания. добавлен. Биннинг также особенно хорошо работает за пределами визуализации для спектроскопических измерений, поскольку вертикальное бинирование можно применять, не опасаясь потери разрешения по оси Y.
Рис. 4. Биннинг 2×2, примененный к датчику для увеличения сбора фотонов в 4 пикселях и соотношения сигнал/шум за счет пространственного разрешения.
Однако архитектура CMOS отличается. Каждая строка должна быть считана последовательно, построчно, перед бинированием, а это означает, что для используемых сегодня КМОП-сенсоров бинирование не даст преимуществ в соотношении сигнал-шум (и скорости), которые оно дает для ПЗС-матриц. Цифровой биннинг для sCMOS по-прежнему объединяет значения для 4 пикселей в случае биннинга 2×2, но шум считывания также увеличивается в 2 раза, поскольку считываются 2 строки пикселей.
Рис. 5. Хотя бинирование не так хорошо работает для КМОП, как для ПЗС, оно все же позволяет повысить отношение сигнал/шум по сравнению с отсутствием за счет пространственного разрешения.
Для меньших пикселей CMOS-сенсора размером 4,6 мкм потребуется биннинг 3×3, чтобы получить ту же область сбора фотонов, что и у пикселя размером 13 мкм. Таким образом, биннинг 3×3 увеличил бы шум считывания в датчике этого типа в 3 раза.
А как насчет оптического согласования?
В идеале размер сенсора должен соответствовать однородной области, доступной для микроскопа, а размер пикселя должен соответствовать объективу и увеличению, используемому для визуализации. Однако иногда это не так для различных комбинаций датчиков, микроскопов и требований к применению. Можно использовать дополнительное постобъективное увеличение, чтобы избежать эффектов виньетирования или расширить поле зрения, чтобы охватить большую площадь сенсора. Другим применением дополнительного увеличения является обеспечение оптимальной выборки изображения для удовлетворения или превышения критериев Найквиста, например. добавление 2-кратного объектива с уменьшением размера пикселя в 2 раза и помогает улучшить пространственное разрешение, но уменьшает поле зрения. Таким образом, использование дополнительных линз в оптической системе, хотя и полезно, имеет ряд соображений. Эта тема обсуждается далее в статье: Оптимизация поля зрения и разрешения для микроскопии.
Однако иногда это не так для различных комбинаций датчиков, микроскопов и требований к применению. Можно использовать дополнительное постобъективное увеличение, чтобы избежать эффектов виньетирования или расширить поле зрения, чтобы охватить большую площадь сенсора. Другим применением дополнительного увеличения является обеспечение оптимальной выборки изображения для удовлетворения или превышения критериев Найквиста, например. добавление 2-кратного объектива с уменьшением размера пикселя в 2 раза и помогает улучшить пространственное разрешение, но уменьшает поле зрения. Таким образом, использование дополнительных линз в оптической системе, хотя и полезно, имеет ряд соображений. Эта тема обсуждается далее в статье: Оптимизация поля зрения и разрешения для микроскопии.
Наибольшие пиксели означают большую глубину лунки для расширенного динамического диапазона
Последний аспект качества изображения, связанный с размером пикселя, который может быть полезен, — это глубина лунки сенсора и то, как ее можно использовать для обеспечения расширенного динамического диапазона. При правильной реализации большие пиксели часто обеспечивают большую пропускную способность сигнала, чем это возможно при использовании меньших пикселей.
При правильной реализации большие пиксели часто обеспечивают большую пропускную способность сигнала, чем это возможно при использовании меньших пикселей.
| Датчики | Камера | Размер пикселя (мкм) | Глубина скважины (e-) |
| КМОП | КМОП с задней подсветкой | 4,6 | 7000 |
| sCMOS Zyla 4.2PLUS с передней подсветкой | 6,5 | 30 000 | |
| sCMOS с задней подсветкой напр. Сона-6 | 6,5 | 55 000 | |
| sCMOS с задней подсветкой напр. Сона-11 | 11 | 85 000 | |
| EMCCD | EMCCD с задней подсветкой напр. ИКсон 888 | 13 | 80 000 |
| EMCCD с задней подсветкой напр. ИКсон 897 | 16 | 180 000 | |
| ПЗС | ПЗС с тыловой подсветкой напр. иКон-М иКон-М |
13 | 100 000 |
| ПЗС с задней подсветкой напр. иКон -Л | 13,5 | 150 000 |
Таблица 4: Сравнение глубины скважины для ряда камер. Обратите внимание, что максимальный динамический диапазон может быть ограничен определенными режимами, доступными для каждой из различных моделей камер, поэтому здесь он не представлен.
Влияние на условия изображения будет заключаться в том, что использование маленьких пикселей может означать низкий динамический диапазон, что может привести к перенасыщенности и потере информации об изображении. Следовательно, для приложений, в которых важен широкий динамический диапазон, хорошо оптимизированный датчик с большими размерами пикселей может быть более подходящим, чем датчик с меньшими пикселями.
Сценарии визуализации, в которых может потребоваться широкий динамический диапазон, включают:
- Люминесценция : эксперименты могут включать сигналы от очень слабых до высоких уровней, чтобы получить биологически значимую информацию об экспрессии генов.
- Нейроны – визуализация нейронов иногда может представлять проблему, поскольку внутри сцены может быть большой динамический диапазон из-за сильных сигналов в центральной области нейрона, дистальные области которого демонстрируют низкий уровень флуоресценции.
- Calcium Imaging — Учитывая огромное количество функций Calcium, существует множество различных условий эксперимента. Для некоторых из них, кальциевых искр и некоторых исследований сердечных и других клеток также требуются широкие динамические диапазоны.
- Большие 3D-объемы — при отображении больших наборов данных различные области, например, Рыбки данио могут иметь большие различия в уровне сигнала. Это может привести к тому, что настройка экспозиции и других параметров изображения будет методом проб и ошибок для получения хорошего изображения. Датчик с широким динамическим диапазоном помогает справляться с динамическим характером таких наборов данных.

Еще одно преимущество широкого динамического диапазона заключается в практическом смысле — датчик с широким динамическим диапазоном чаще находится в пределах диапазона и избегает насыщения, требуя меньшего количества настроек, таких как экспозиция.
Выводы
Несмотря на то, что существует интерес к камерам с малыми пикселями для сохранения деталей изображения при малом увеличении, по-прежнему существует большая потребность в камерах с большими пикселями для работы в условиях низкой освещенности.
- Камеры с малым размером пикселей подходят для исследований с малым увеличением. Доступно множество моделей, которые работают в этих режимах более высокого освещения.
- Размер пикселя 6,5 мкм, который является общим для многих камер для микроскопии научного класса, обеспечивает хороший баланс между сбором фотонов и разрешением для типичных приложений, основанных на флуоресценции.
- Если вы хотите получить от детектора наилучшую возможную чувствительность, камеры с большим размером пикселей являются наиболее подходящими, т.
 е. для визуализации отдельных молекул и люминесценции
е. для визуализации отдельных молекул и люминесценции - Биннинг можно использовать для увеличения соотношения сигнал-шум как в ПЗС-, так и в КМОП-сенсорах, однако для КМОП-сенсоров биннинг дает меньше преимуществ, чем для ПЗС.
Ни одна камера не справляется со всеми сценариями визуализации лучше, чем любая другая камера. К счастью, в настоящее время существует ряд камер, которые можно выбрать для различных приложений, требующих, например, самого высокого пространственного или временного разрешения или наилучшей возможной чувствительности. Это означает, что важно в первую очередь учитывать потребности приложения, а не предполагать, что последняя модель камеры с самым большим сенсором и наибольшим количеством мегапикселей будет лучшим вариантом.
Размер и размеры пикселей. Введение в анализ биоизображений
%load_ext автоперезагрузка
%автоперезагрузка 2
# Импорт по умолчанию
импорт системы
sys.path.append('../../../')
из импорта хелперов *
импортировать numpy как np
из matplotlib импортировать pyplot как plt
Введение
В этом разделе будут рассмотрены размеры и размеры пикселей в ImageJ. Попутно мы увидим, как генерировать масштабные линейки и исправлять изображения с неправильным размером или размерами в пикселях — по крайней мере, всякий раз, когда мы знаем, каковы правильные значения.
Попутно мы увидим, как генерировать масштабные линейки и исправлять изображения с неправильным размером или размерами в пикселях — по крайней мере, всякий раз, когда мы знаем, каковы правильные значения.
Размер пикселей и свойства
Вы можете увидеть размер изображения в пикселях в ImageJ в Image ‣ Properties…. Они предоставляются отдельно как значения для ширины пикселя и высоты пикселя.
Существует также дополнительное значение Глубина вокселя, которое имеет значение только для стеков z ; это дает интервал между z -срезами.
Рис. 42 Свойства изображения образца Confocal Series , включая размер пикселя.
Если информация о размере пикселя недоступна, размер пикселя указывается как 1 пиксель: не очень информативно. В противном случае размеры в пикселях задаются в единицах, отображаемых рядом в диалоговом окне свойств.
Рис. 43 Свойства изображения для образца Fluorescent Cells , которые не включают полезную информацию о размере пикселя.
Ширина и высота в пикселях обычно одинаковы. Глубина вокселя (там, где это уместно) часто бывает разной.
Вопрос
Один из способов проверить, задана ли для изображения информация о размере пикселя, — использовать Изображение ‣ Свойства…
Как еще можно это проверить, еще проще?
Совет: Ответ уже должен быть виден на Рис. 42 и Рис. 43.
Ответ
Размер изображения указан в верхней части каждого окна изображения. Если доступна информация о размере пикселя, она указывается в калиброванных единицах. В противном случае он дается только в пикселях.
Размеры и размеры пикселей
Как описано выше, размер пикселя влияет на измерения в ImageJ, но единицы измерения нигде не отображаются в таблице результатов .
Кроме того, после добавления измерения в таблицу результатов оно фиксируется: оно не будет автоматически обновляться, если размеры пикселей будут изменены позже.
По этой причине вам нужно быть осторожным, чтобы проверить размеры пикселей до , делая какие-либо измерения, и убедиться, что вам ясно, какие единицы измерения были использованы.
Рис. 44 Одна и та же область интереса (здесь квадрат 100 x 100 пикселей) может иметь разную площадь, если измерять ее на изображениях с разными размерами пикселей. Измерение преобразуется перед добавлением в таблицу результатов , но единицы измерения не включаются.
Установка размера пикселя
Если информация о размере пикселя отсутствует, но вы знаете, какой она должна быть, вы можете просто ввести требуемые значения ширины и высоты в диалоговом окне Свойства… .
Ввод микрометров
В зависимости от вашего компьютера ввод микрометров для единиц измерения может быть затруднен. К счастью, ввод мкм также работает — ImageJ автоматически преобразует мкм → мкм .
Если вы не знаете, каким должен быть размер пикселя, но знаете длину какой-либо структуры в вашем изображении, то вы можете
Это автоматически заполнит Расстояние в пикселях на основе длины линии. Затем вы можете ввести известную физическую длину и единицы, а затем нажать OK.
Вы должны проверить Изображение ‣ Свойства…, чтобы убедиться, что значения были обновлены разумно.
Затем вы можете ввести известную физическую длину и единицы, а затем нажать OK.
Вы должны проверить Изображение ‣ Свойства…, чтобы убедиться, что значения были обновлены разумно.
Рис. 45 Установка размера пикселя изображения путем вставки длины известной структуры.
Использование Set Scale…
В идеале, Analyze ‣ Set Scale… следует использовать с калибровочным слайдом для надежного определения размеров пикселей. Затем значения можно перенести на другие изображения, полученные с теми же настройками, используя Image ‣ Properties… (или макрос).
Имейте в виду, что если вы нарисовали линию, как описано выше, значение расстояния в пикселях инициализируется из этой линии, поэтому не меняйте его. Скорее, до изменяют значения известного расстояния и единицы длины в соответствии с физической длиной, указанной линией.
Если единица длины должна быть мкм , но на вашей клавиатуре нет мкм , вы можете вместо этого ввести мкм .
Отображение масштабной линейки
Обычно рекомендуется включать масштабную линейку в любые рисунки. Это действительно имеет смысл только в том случае, если размеры пикселей установлены правильно в свойствах изображения.
Масштабную линейку можно создать, выбрав Анализ ‣ Инструменты ‣ Масштабная линейка….
Рис. 46 Установка масштабной линейки в качестве наложения.
Существует несколько параметров, которые можно использовать для настройки внешнего вида масштабной линейки. Одним из наиболее важных является параметр «Наложение», поскольку он определяет, «вжигается» ли линейка масштаба в изображение (т. е. изменяются значения пикселей) или вместо этого она добавляется как (текстовая) область интереса как часть наложения изображения.
Мой совет: всегда добавляйте масштабную линейку в качестве наложения.
Это означает, что вы можете удалить его снова или изменить его внешний вид.
Единственным недостатком является то, что если вы сохраните изображение сразу, оно может не появиться в других программах. Решение состоит в том, чтобы сгенерировать RGB-изображение, включающее наложение, в качестве последнего шага перед сохранением с помощью команды Изображение ‣ Наложение ‣ Сведение.
Решение состоит в том, чтобы сгенерировать RGB-изображение, включающее наложение, в качестве последнего шага перед сохранением с помощью команды Изображение ‣ Наложение ‣ Сведение.
Стеки и гиперстеки
2D-изображения существуют с самого начала. Затем ImageJ поддерживал стеков , что позволяло дополнительное измерение, которое могло включать либо разные моменты времени, либо z -срезы, но не оба одновременно. В настоящее время гиперстеки являются более гибкими производными от стеков и могут (в настоящее время) хранить до 5 измерений, не путая их.
Навигация по измерениям
Со стеком или гиперстеком только одно 2D срез является «активным» в любой момент времени.
Окно изображения (гипер)стека может иметь до 3 ползунков, используемых для навигации по каналам , z и времени измерений и выбора активного среза.
В случае многоканальных изображений (где есть измерение «канал») любые изменения в таблицах поиска вносятся для всех срезов на активном в данный момент канале.
Рис. 47 5D-изображение, просмотренное в ImageJ.
Исправление размеров
Как и размер в пикселях, размеры изображения можно найти в разделе Изображение ‣ Свойства….
Иногда размеры могут быть неверными. Это может произойти, например, если разные z -слайсы были неправильно интерпретированы как временные точки при открытии файла или не было обнаружено наличие нескольких каналов. Неверная интерпретация размеров может повлиять не только на отображение изображения, но и на некоторую обработку и измерения.
Также можно изменить размеры через Изображение ‣ Свойства…, но я считаю, что иногда это может быть ненадежным из-за старого различия между стеком и гиперстеком (т. е. он не преобразует стек в гиперстек и, следовательно, не отображает все нужные ползунки). Лучшим вариантом является использование Image ‣ Hyperstack ‣ Stack to Hyperstack… для фиксации размеров.
Практический
Что-то ужасное случилось с файлом lost_dimensions. tif , так что он отображается как 3D-стек, когда в действительности он должен иметь больше измерений.
tif , так что он отображается как 3D-стек, когда в действительности он должен иметь больше измерений.
Проверив файл, определите, сколько каналов, z -срезов и временных точек он изначально содержал, и установите их с помощью Image ‣ Hyperstack ‣ Stack to Hyperstack…, чтобы он отображался правильно. Каковы правильные размеры?
Решение
lost_dimensions.tif должен содержать 2 канала, 3 z -слайса и 16 временных точек.
Размеры указаны в порядке по умолчанию ( xyczt ).
Участки и профили
Дополнительные измерения могут затруднить визуализацию и интерпретацию данных. Уменьшение размеров может помочь.
Analyze ‣ Plot Profile можно использовать для создания одномерного графика значений пикселей вдоль линии внутри изображения.
Чтобы использовать его, вы можете сначала нарисовать линию ROI.
По умолчанию значения пикселей, расположенные вдоль линии, будут отображаться на графике, однако при необходимости можно усреднить несколько пикселей, расположенных перпендикулярно линии. Для этого дважды щелкните инструмент линии и отрегулируйте значение ширины линии.
Для этого дважды щелкните инструмент линии и отрегулируйте значение ширины линии.
Также можно применить Analyze ‣ Plot Profile K к прямоугольнику, и в этом случае он будет усреднять пиксели по вертикали (по умолчанию) или по горизонтали (если нажата клавиша Alt ).
Другим вариантом, если у вас есть стек или гиперстек, является использование Image ‣ Stacks ‣ Plot Z-axis Profile для создания профиля по срезам. По сути, это отображает среднее значение в любой области интереса (или по всему изображению) для каждого среза в стеке. Возможно, неожиданно, та же самая команда может также генерировать профиль в разные моменты времени; при необходимости отображается диалоговое окно для выбора размера.
Во всех случаях графики профиля содержат кнопку Live. Это означает, что данные графика обновляются по мере внесения любых изменений в изображение, включая создание и перемещение областей интереса.
Рис. 48 Три различных графика профиля, основанные на прямоугольнике. (Вверху) Обычный график профиля из активного 2D-среза с помощью меню Анализ ‣ График профиля.
(Внизу) Профили, сгенерированные с помощью команды Изображение ‣ Стеки ‣ Построить профиль по оси Z вдоль оси z (слева) и по временным точкам (справа) .
(Вверху) Обычный график профиля из активного 2D-среза с помощью меню Анализ ‣ График профиля.
(Внизу) Профили, сгенерированные с помощью команды Изображение ‣ Стеки ‣ Построить профиль по оси Z вдоль оси z (слева) и по временным точкам (справа) .
Практический
Создайте график профиля из любого изображения, нарисовав линию ROI и нажав K .
Что касается ImageJ, график профиля сам по себе является изображением, хотя и странным. Это означает, что вы можете использовать Image ‣ Properties…, чтобы проверить размер пикселей графика профиля .
Что вы заметили в размерах пикселей?
Решение
Вероятно, вы увидите, что ширина и высота в пикселях отличаются. На самом деле ширина пикселя зависит от масштабирования по оси x, а высота пикселя зависит от масштабирования по оси y.
Это может быть очень полезно, потому что это означает, что вы можете выполнять измерения на самом графике профиля.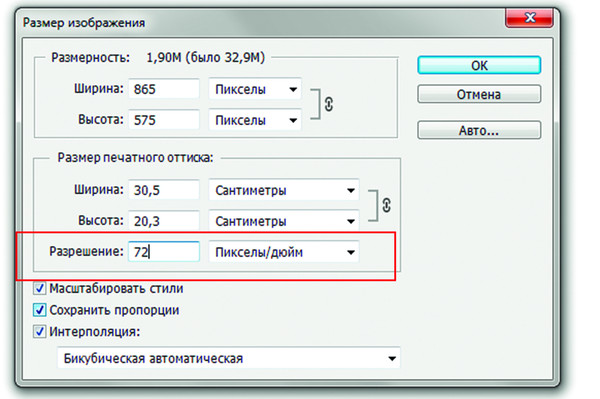
Если вы хотите измерить расстояние по оси x или y, вы можете использовать инструмент линии, удерживая нажатой Shift . Это заставляет линию быть идеально горизонтальной или идеально вертикальной; без Shift было бы легко провести линию по небольшой диагонали, что могло бы дать неправильный результат.
Отображение размеров
Z-выступы
Команда для создания проекции z в ImageJ: Image ‣ Stacks ‣ Z Project…. Это поддерживает несколько различных типов проекций, как показано на рис. 49.
рис = create_figure(figsize=(8, 4))
show_image('images/z-project-sum.png', title='Проекция суммы', pos=131)
show_image('images/z-project-max.png', title='Максимальная проекция', pos=132)
show_image('images/z-project-min.png', title='Минимальная проекция', pos=133)
клей_фиг('fig_dimensions*z*проект', рис)
Рис. 49Три проекции стека z . Суммарные проекции часто похожи на максимальные проекции, но менее четкие.
Вопрос
Представьте себе вычисление суммы и максимальной проекции стопки из 10 фрагментов, содержащей большое ядро в фокусе. Как может быть затронута каждая из этих проекций, если ваш стек содержит:
-
4 дополнительных фрагмента не в фокусе (с ненулевыми значениями пикселей)
-
несколько очень ярких, изолированных, случайным образом распределенных пикселей-выбросов со значениями в два раза больше, чем должны быть (из-за шума)
Ответ
Дополнительные плоскости, находящиеся не в фокусе, повлияют на суммарные проекции: увеличат все результирующие значения пикселей. Однако дополнительные плоскости окажут минимальное влияние на максимальные проекции, поскольку они вряд ли будут содержать более высокие значения, чем плоскости в фокусе.
Однако на максимальные прогнозы сильно повлияют яркие выбросы: они почти наверняка появятся в результате с неизменными значениями.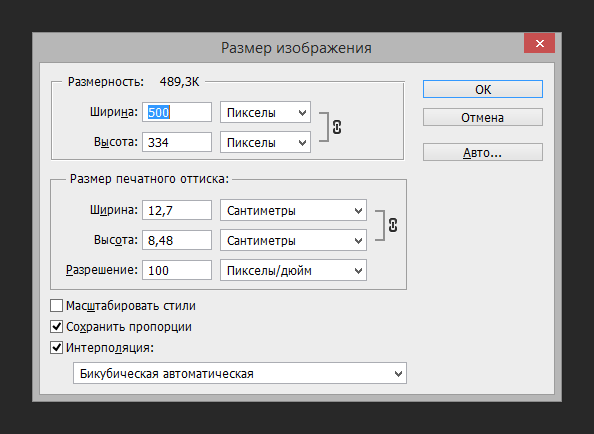 Такие выбросы также будут влиять на проекцию суммы, но менее сильно, потому что каждый пиксель будет содержать сумму 9разумные значения и только 1 большое значение (если только по невезению или по сомнительному детектору многие выбросы не перекрываются в одной и той же координате xy ).
Такие выбросы также будут влиять на проекцию суммы, но менее сильно, потому что каждый пиксель будет содержать сумму 9разумные значения и только 1 большое значение (если только по невезению или по сомнительному детектору многие выбросы не перекрываются в одной и той же координате xy ).
Практический
Что произойдет, если вы вычислите максимальную проекцию дважды для 5D-изображения Файл ‣ Открытые образцы ‣ Митоз?
Под этим я подразумеваю, что вы запускаете Image ‣ Stacks ‣ Z Project… на исходном изображении, а затем снова на выходе первой проекции.
Решение
Вы должны получить максимум z -projecton, за которым следует проекция времени!
Если есть измерение времени, но нет измерения z , Image ‣ Stacks ‣ Z Project… вместо этого будет использоваться время.
Если является измерением z , но вам все равно нужна временная проекция, вы можете попробовать осторожно использовать Image ‣ Hyperstack ‣ Re-order Hyperstacks… или Image ‣ Hyperstack ‣ Stack to Hyperstack… для временного переключения имен измерений и заставить ImageJ делать то, что вы хотите.
Ортогональные виды
Команда Изображение ‣ Стеки ‣ Ортогональные виды позволяет создавать интерактивные ортогональные срезы из стека изображений. Это открывает 2 дополнительных окна, так что, когда вы щелкаете в любой точке исходного вида xy , вам показываются поперечные сечения через эту точку с каждого направления.
Рис. 50 Ортогональные виды в ImageJ.
Обратите внимание, что при просмотре ортогональных срезов клики по изображению перехватываются. Это затрудняет нормальное взаимодействие с изображением или создание новых областей интереса. Если вы закроете любой из дополнительных видов, то команда деактивируется, и вы сможете вернуться к работе с изображением, как и раньше.
Нарезка
Если вы внимательно посмотрите на ортогональные срезы, вы увидите, что это изображения RGB, даже если исходный стек не является RGB.
Они также заблокированы для использования LUT и настроек яркости/контрастности, которые были активны при первом запуске команды.