как правильно подбирать и сочетать цвета
Человеческий глаз воспринимает от 8 до 16 миллионов цветов. И как тут понять, что с чем сочетать, чтобы получить удачную комбинацию в дизайне? Для упрощения этой задачи были придуманы различные цветовые таблицы. И одна из их разновидностей, причем самая простая, – это цветовой круг Йоханнеса Иттена.
Я расскажу, что же представляет собой схема Иттена, зачем она нужна и как ей пользоваться.
Что такое круг Иттена
Любая цветовая таблица показывает, как один цвет перетекает в другой, чем они отличаются и как их можно комбинировать. А круг Иттена – это один из наиболее простых вариантов подбора цвета, включающий 12 различных оттенков.
Создатель круга – Йоханнес Иттен, швейцарский художник и известный теоретик дизайна. Он написал книгу «Искусство цвета», где разобрал основы цветовой гармонии и описал принципы работы с данной таблицей.
Зачем такой круг нужен
Чтобы найти гармоничные сочетания из общей палитры.
Еще необходимо помнить, что круг Иттена довольно упрощен, и с его помощью практически нереально подобрать менее яркие оттенки. Но если регулировать насыщенность и яркость таблицы, вполне можно подобрать менее сочные тона для палитры.
Как устроен цветовой круг Иттена
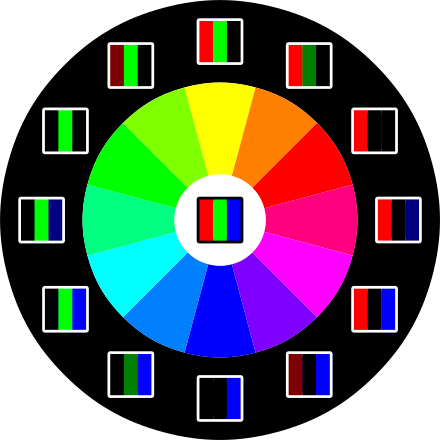
В такой схеме все контрастные относительно друг друга цвета расположены на противоположной стороне. При этом она сочетает в равной степени как холодные, так и теплые оттенки.
Схема Иттена включает 12 максимально насыщенных цветов, полученных из трех центральных, называемых еще первичными, – это красный, синий и желтый. Поочередным смешением рядом расположенных оттенков получаются вторичные – оранжевый, фиолетовый и зеленый.
Способы комбинации нескольких цветов по схеме Иттена
Есть множество способов получения гармоничных цветовых сочетаний с помощью круга Иттена. Ниже перечислю несколько самых эффективных и часто используемых.
Комплементарное сочетание
Здесь берутся два максимально контрастных тона, расположенные друг напротив друга по указанной схеме. Их еще называют комплементарными или дополнительными цветами.
Этот вариант комбинации подходит для создания выразительного акцента – один оттенок берется как базовый, а второй используется не слишком часто для яркого выделения определенных объектов на общем фоне. Как в примере с текстом на изображении выше – на фоне базовый цвет, а надпись отлично выделена за счет сильного контраста.
Классическая триада
Если нет необходимости в столь сильном акцентировании и контрасте элементов, можно использовать принцип триады. Хотя и у него есть несколько типов, первый – классический. С помощью данного принципа можно выбрать один основной и подобрать к нему два разных, но гармоничных дополнительных тона.
Хотя и у него есть несколько типов, первый – классический. С помощью данного принципа можно выбрать один основной и подобрать к нему два разных, но гармоничных дополнительных тона.
Для образования комбинации в данном сочетании используется равносторонний треугольник. Три цвета по разным его углам образуют сбалансированную гамму.
Аналоговая триада
Второй вариант цветовой комбинации. Таким способом можно не ограничиваться тремя, а брать, допустим, пять оттенков. Причем тех, что расположены рядом на круге Иттена. В данном сочетании исключены сильные или резкие контрасты. Если подбирать с ее помощью тона, то итоговая комбинация выйдет сдержанной и спокойной, с плавными переходами.
Контрастная триада
В данном случае за основу берется комплементарное сочетание, но дополнительный цвет заменяется двумя другими, расположенными рядом по цветовой схеме.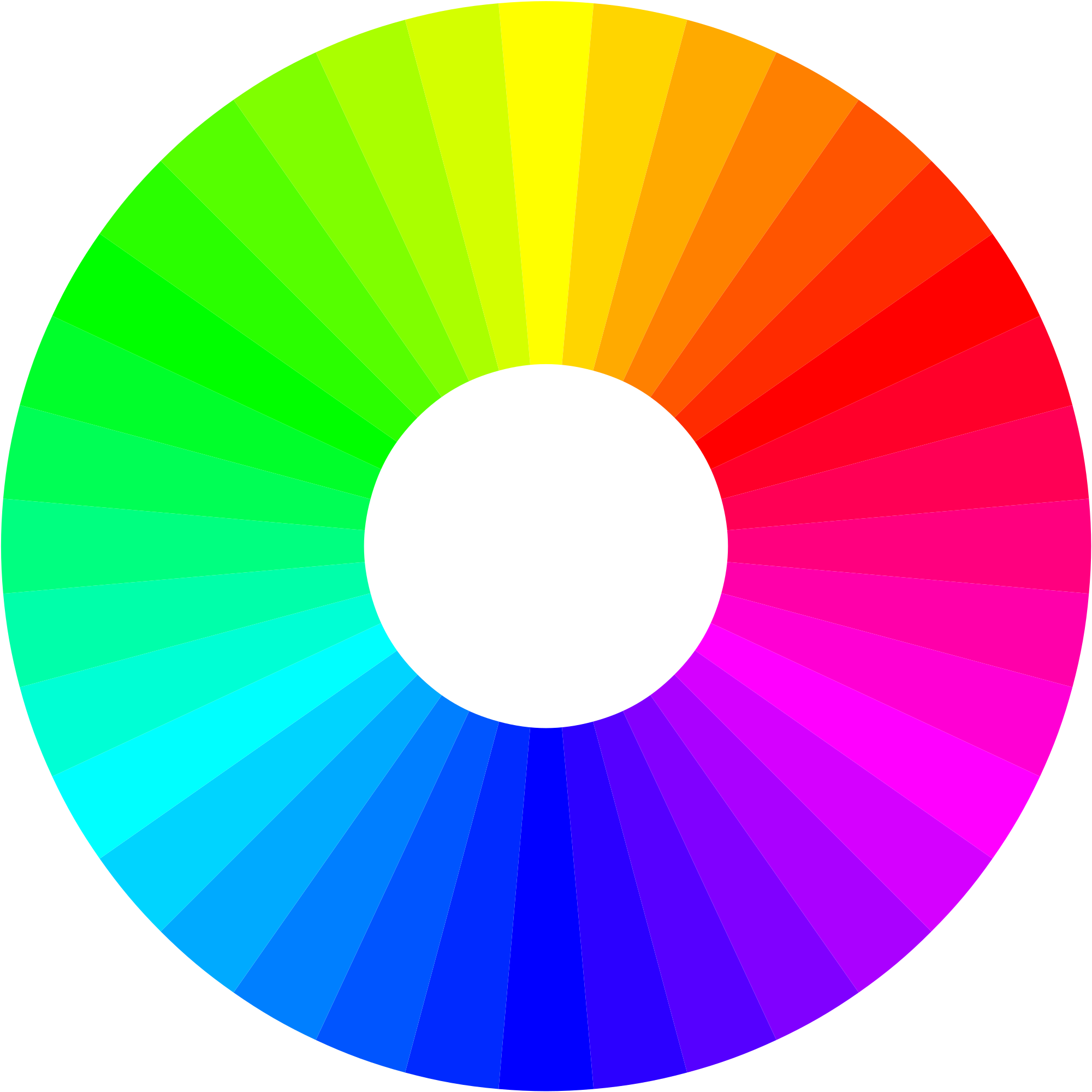 В итоге получается эдакий равнобедренный треугольник. Эта триада хороша тем, что допускает контрасты, но не такие резкие, как в случае с дополнительными тонами.
В итоге получается эдакий равнобедренный треугольник. Эта триада хороша тем, что допускает контрасты, но не такие резкие, как в случае с дополнительными тонами.
Тетрада
Если двух или трех цветов будет недостаточно, можно воспользоваться принципом тетрады, он охватывает довольно широкий спектр. С помощью квадрата можно подобрать 4 разных цвета, которые будут отлично сочетаться между собой.
Прямоугольник
Тоже хорошая схема для определения четырех цветов для дизайна, но не столь контрастных, как в вышеизложенной схеме. С помощью прямоугольника можно подобрать две комплиментарные пары, близкие друг к другу по оттенкам.
Другие способы подбора цветов
Есть множество других таблиц с сочетаниями цветов, в том числе расширенных, с помощью которых можно подобрать идеальные варианты для самых разных случаев. Но порой проще воспользоваться специальными инструментами, доступными в интернете. Например, инструментом от Paletton, позволяющим выбрать из общего спектра нужное количество оттенков. В нем очень легко настраивать параметры насыщенности и яркости. Далее можно получить более подробную информацию о нужном оттенке, просто нажав на нужную область.
Например, инструментом от Paletton, позволяющим выбрать из общего спектра нужное количество оттенков. В нем очень легко настраивать параметры насыщенности и яркости. Далее можно получить более подробную информацию о нужном оттенке, просто нажав на нужную область.
Есть и другой инструмент – Adobe Color. В нем используются те же правила сочетания, но работать с ним немного сложнее. При необходимости можно задать оптимальное правило гармонии цветов и режим (RGB, CMYK, HSB или LAB). Код получившегося оттенка очень легко скопировать – он приводится в правом нижнем углу и зависит от схемы, которая ранее была указана.
На этом у меня все. Надеюсь, указанные принципы и инструменты пригодятся в вашей работе!
Как работать с цветами в digital-маркетинге — БЛОГ ADVENTUM
Подбирать цвета убийственно сложно: все эти RGB, CMY, RYB, HSV больше мешают, чем помогают. Разобрались, как удачно подобрать цвета для проекта и сэкономить на дизайнере.
Цвет — эффективный способ коммуникации. Цветом можно изменить настроение, эмоции и самочувствие. Цвет передает смысл послания и может вызвать требуемую реакцию. Например, комбинация красного и жёлтого вызывает чувство голода, поэтому часто используется в фастфуде.
Цвет подробно изучали двое ученых — Ньютон и Гете. Все современные модели работы с цветом основываются на их открытиях.
Ньютон первый смог осознанно разложить белый цвет на спектр: для этого он пустил пучок света через призму. Он также обнаружил, что спектр цветов можно собрать обратно и получить белый цвет.
На этом принципе построена работа всех современных устройств. Модель, по которой свет распадается и собирается обратно, — RGB
Но Ньютон был сосредоточен на научном объяснении цвета, а людям хотелось понять, как работать с цветом в жизни.
Спустя 150 Гете в «Теории цвета» анализирует цвет с точки зрения восприятия человека. Гете создает цветовой круг, который впоследствии улучшает художник Иоханнес Иттен:
Цветовой круг.Цветовые модели и сочетания цветов
Существует 5 популярных цветовых моделей: RYB, RGB, CMY (иногда указывается как CMYK), HSL (она же HSV) и LAB. LAB и HSV мы не будем рассматривать, потому что они не помогут научиться подбирать цвета. Остановимся на анализе RYB, RGB и CMY.
RGB — аддитивная цветовая модель. Это значит, что свет исходит от какого-то источника: солнца, лампы, монитора. При сочетании основных цветов (красного, зеленого и синего) получается белый цвет. По этому принципу работают мониторы, телевизоры, экраны телефонов: каждый пиксель одновременно излучает эти три цвета.
CMY — противоположная RGB модель. Она субтрактивна: цвета не излучаются от источника, а отражаются от носителя, например, бумаги. Поскольку цвета не складываются, а вычитаются из белого света, в CMY удобнее считать какое количество света отразилось, а не поглотилось. Если вычесть из белого три первичных цвета (RGB), мы получим тройку дополнительных цветов CMY.![]()
RYB — классическая цветоваяцветова, начало которой положил Гете, а улучшил Иттен. Эта модель популярна у художников, потому что объясняет правила смешивания пигментов цветов. Хотя RYB не используется в электронике и печати, она содержит ряд важных наблюдений: на ее основе разработаны RGB и CMY, и по ее примеру комбинируются цвета внутри этих моделей.
Иттен полагал, что можно найти цветовую гармонию через цветовое колесо:
В книге «Искусство цвета» он приводит несколько схем, которые помогают подобрать гармонирующие цвета. Цвета в цветовом круге расположены так, чтобы дополнительные цвета всегда давали темно-серый цвет: Иттен полагал, что темно-серый — самый гармоничный для глаза цвет.
Разберём несколько характеристик цвета: они помогут вамвам пон, как применять и комбинировать цвета в работе.
Тон — это чистый цвет: зеленый, синий, красный и так далее.
Оттенок — это добавление к чистому цвету белого цвета:
Тень — это добавление к чистому цвету черного цвета:
Первичные цвета — это основные цвета, из которых получаются остальные цвета. Вторичные цвета — это цвета, которые получаются при смешивании основных цветов. Из смеси вторичных цветов с первичными получаются третичные цвета.
Вторичные цвета — это цвета, которые получаются при смешивании основных цветов. Из смеси вторичных цветов с первичными получаются третичные цвета.
Аналоговые и дополнительные цвета, Триада, Тетрада и Квадрат — это основные способы получения цветных схем.
В каждой модели дополнительный цвет является смесью двух основных, поэтому при сложении дополнительного цвета с оставшимся основным, вы получите цвет в середине модели: Черный для RYB и CMY, белый для RGB.В RYB первичные цвета: Красный, Желтый и Синий.
В RGB: Красный, Зеленый и Синий.
В CMY: Циан, Пурпурный и Желтый.
У RGB в середине получается белый свет, потому что модель RGB используется в источниках света, например, мониторах. У CMY и RYB в середине будет получаться черный, потому что смесь красок дает черный цвет.
CMYK — это тот же CMY, но с добавлением «ключевого цвета» — черного. Дело в том, что смесь CMY не дает настоящего черного цвета, поэтому эффективнее и экономичнее использовать черную краску.
Дело в том, что смесь CMY не дает настоящего черного цвета, поэтому эффективнее и экономичнее использовать черную краску.
Как подобрать цвет для проекта
Человеческий глаз видит 10 миллионов цветов. Из этих 10 миллионов вам нужно выбрать 1 цвет, который будет коррелировать с сайтом и брендом.
По Иттену цветовая гармония — это объективные законы, которые должны быть вырваны из субъективного восприятия людей. Иттен полагал, что субъективное восприятие цвета может быть, но не может претендовать на объективность.
Цветовой круг Иттена помогает прокачивать цветовой вкус и лучше подбирать цвета, но Иттен не прав: нет единого рецепта гармоничных цветов, на восприятие человеком цвета влияет много факторов: индивидуальные и национальные различия, эмоциональное напряжение, ситуация.
Цветовую гармонию нельзя просчитать наперед, ее можно только спрогнозировать. Цветовая гармония наступает только тогда, когда сочетание цветов вызывает положительный отклик у аудитории. Отклик зависит от характеристик вашей аудитории: пола, возраста, уровня образования и культурного развития, привычек, предпочтений, а также от случайных факторов и ситуаций, вроде моды.
Отклик зависит от характеристик вашей аудитории: пола, возраста, уровня образования и культурного развития, привычек, предпочтений, а также от случайных факторов и ситуаций, вроде моды.
К счастью, подобрать цвет сегодня не так сложно:
- Возьмите за основу существующий дизайн. Если у вас есть логотип и цветовая тема, начните с нее, не переделывайте все с нуля.
- Не используйте цвета конкурентов. Это поможет вам отстраниться от них и не давать бесплатной рекламы.
- Помните про аудиторию. Сайт детского сада не должен напоминать похоронное бюро. Продумайте тон послания, которое вы хотите донести аудитории (радость, серьезность намерений и т.п).
- Не используйте клише. Помнить про запросы аудитории — хорошо, но необязательно раскрашивать сайт для девочек в розовый цвет. Отход от клише повысит доверие к вам.
- Выпишите слова. Если сложно подобрать цвет, выпишите слова, которые у вас ассоциируются с вашим брендом. Ассоциации помогут натолкнуть вас на правильный выбор цвета.
 Если все равно не получается, попробуйте загуглить значения цветов.
Если все равно не получается, попробуйте загуглить значения цветов.
Можно черпать идеи у сайтов, которые вам нравятся:
Загрузите скриншот понравившегося сайта и узнайте его цветовую палитру. Подборка цветов от Адобе: https://color.adobe.com/ru/create/color-wheel/Можно также ознакомиться с готовыми палитрами, которые составили другие люди. Проблема с этим подходом в том, что в палитрах часто больше цветов, чем вам нужно.
Выберите гармоничный основной цвет.
Черпать вдохновение можно на Дриббле и Дизайниспирейшене можно посмотреть работы дизайнеров и заимствовать их цветовые палитры.
После того, как вы выбрали главный цвет, вы можете подобрать к нему правильные оттенки. Например, для синего цвета более яркие цвета скорее будут означать молодую и энергичную компанию, в то время как темные тона более серьезную, корпоративную:
Создание цветовой палитры.
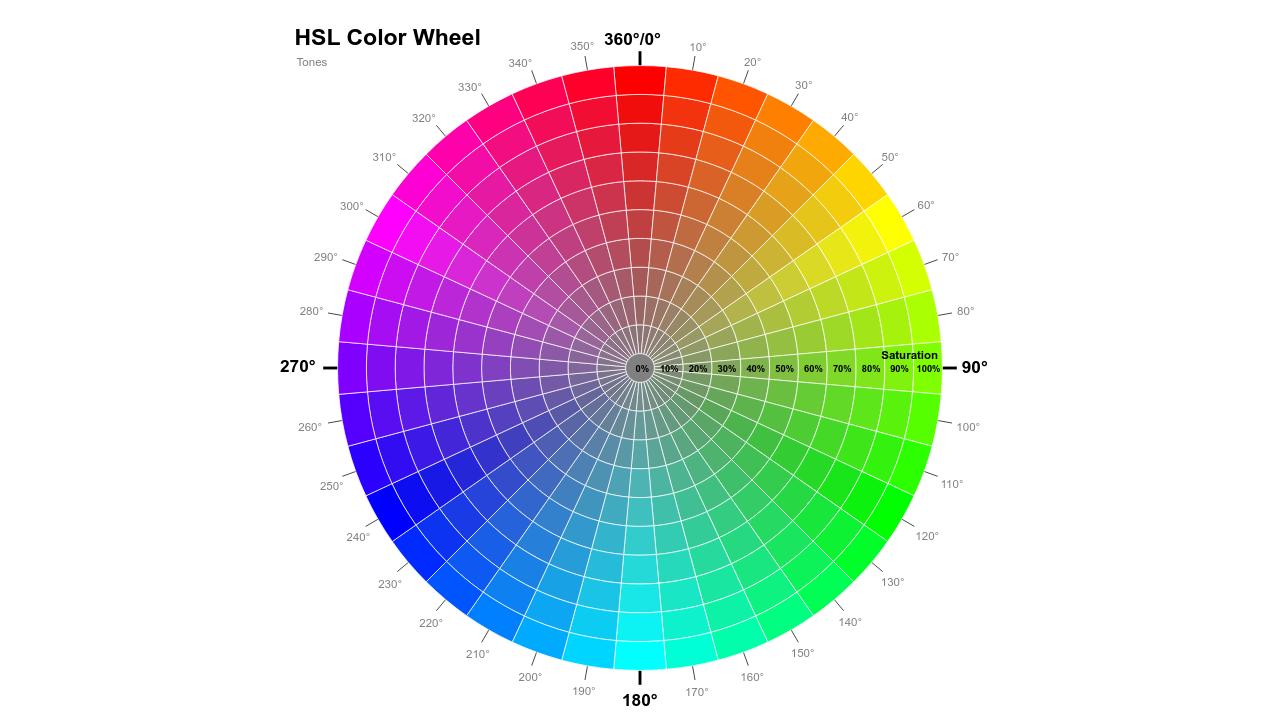
Тон / Hue — это то, что мы имеем в виду, говоря «цвет».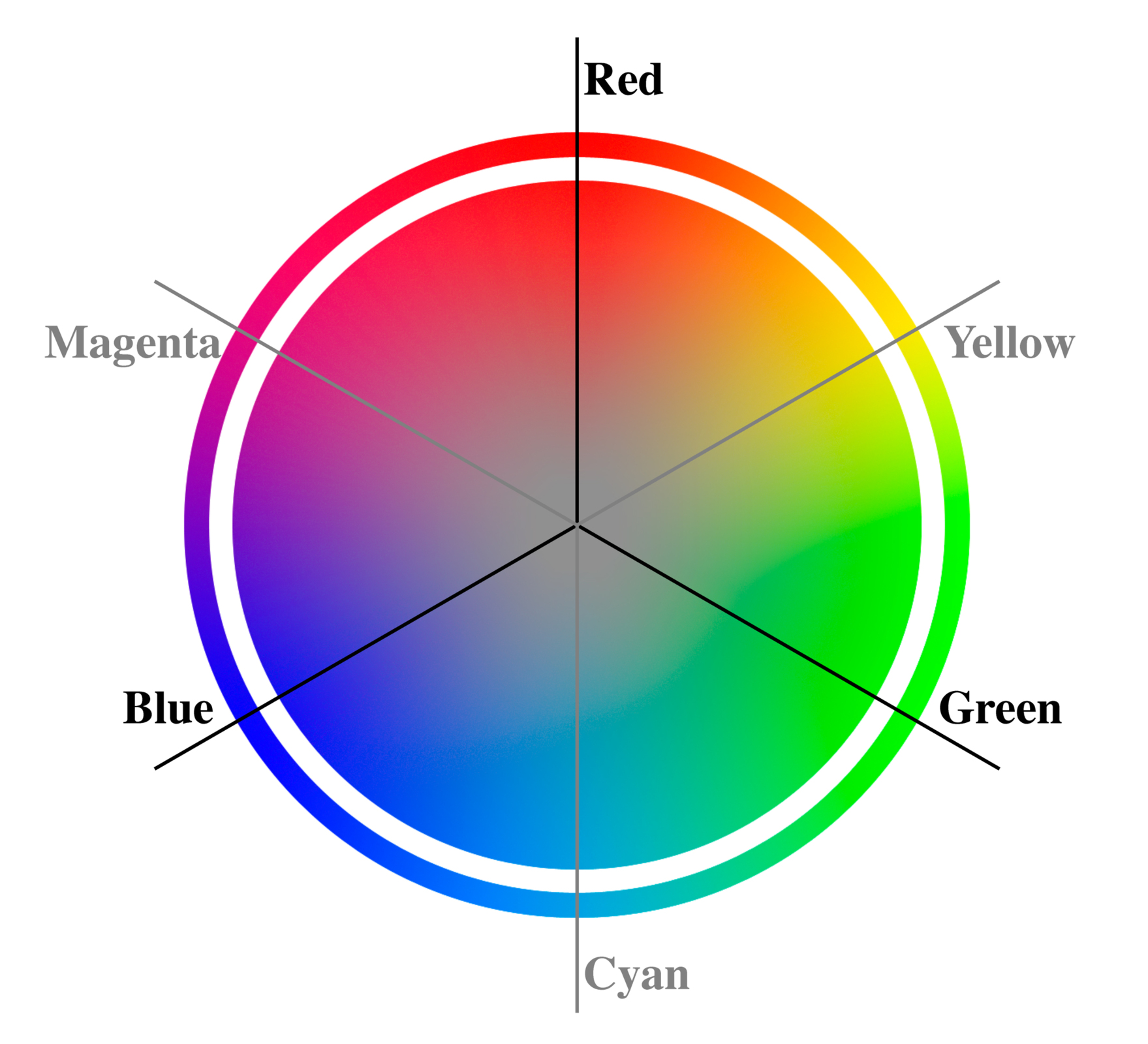 Синий, красный, зеленый, оранжевый, фиолетовый и тд.
Синий, красный, зеленый, оранжевый, фиолетовый и тд.
Насыщенность / Saturation — параметр цвета, характеризующий степень чистоты цветового тона.
Яркость / Brightness — обозначает степень отличия цвета от белого или черного.
Теперь у вас должен быть HEX-код цвета. HEX-код состоит из трех пар цифр и может принимать значения от 0 до 9 и букв от A до F.
Первая цифра уточняет цвет, вторая — оттенок. Чем больше значение пар, тем светлее цвет:
В уже знакомым нам RGB и CMY значения цветов будут такими:
Если понимать шестнадцатеричный код цветов, вы сможете точно комбинировать цвета и цветовые схемы.
Есть несколько простых техник работы с кодом:
- Переставлять одну пару в разные места кода
- Удвоение первой цифры в первой паре и разделение на два остальные первые цифры
- Комбинирование цветов из фото
Когда вы будете пытаться создать палитру цветов, может показаться, что подобные решения рабочие:
На самом деле такие палитры плохо применяются к реальному дизайну, поскольку в них больше цветов, чем вам может понадобиться (это учитывая, что вам нужно разбавить цвета белым и серым).
Реально вам нужно только 2 цвета:
- основной цвет (в нашем случае это #30c9e8),
- акцентный цвет.
Если вы сможете обойтись на сайте только этими цветами, вам не придется заморачиваться с цветовыми кругами, триадами, тетрадами и прочими страшными вещами.
Как подобрать акцентирующий цветЗайдите в Палеттон и вбейте код цвета. Вы сможете быстро подобрать к нему удачный акцентирующий цвет
Если результат не устраивает, то все-таки можно поиграться с триадами и тетрадамиВ итоге мы получаем гармоничную цветовую схему. Добавим также белый цвет, потому что белый — всегда круто.
Осталось добавить серого
Подбираем гармоничный серый.
Подобрать серый можно в том же Дриббле и Дизайниспирейшене. Либо, если у вас есть Фотошоп, можно сделать так:
Нужно отметить, что этот метод работает очень хорошо с синим цветом. Если у вас другой цвет, вам нужно либо повысить прозрачность в пределах 5—10%, или ограничиться стандартным серым.
Если у вас другой цвет, вам нужно либо повысить прозрачность в пределах 5—10%, или ограничиться стандартным серым.
Посмотрите, какой кайф:
Как по-другому подобрать цвета.
Можно сначала сделать сайт в черно-белом исполнении, а уже потом расставлять акценты:
В этом примере голубой — главный цвет. Он используется щедро: в качестве фона и на иконках.
Красный — акцентный цвет, который отлично выделяется на голубом. Он используется на малых участках и как будто скуповато. Это правильно: чем меньше вы используете красного, тем сильнее он выделяется.
Темно-серый используется для текста, логотива и контура иконок. Если делаете иконки, всегда наполняйте их цветом. Хорошо, если получится заменить иконки на живые фотографии.
Белый и светло-серый на фоне. Светло-серый необязателен, но он добавляет изюминки, страница выглядит продуманной и законченной.
Убедитесь, что у вас достаточно контраста между фоном и текстом: так его проще читать и быстрее усваивать.
Гайдлайн по контрастам (на английском)
Проверка на контраст
Удачные и неудачные цветовые решения
Несколько удачных и неудачных подборок цвета.
Попробуйте самостоятельно проанализировать, почему в этих сайтах плохо подобраны цвета:
Цвет для своего проекта можно подобрать самостоятельно, необязательно обращаться за помощью к профессиональным дизайнерам. Продолжайте экспериментировать с цветами, чтобы находить удачные решения
Чем больше практики, тем лучше вы будете подбирать цвета для проекта, и неважно что это: сайт, баннер, печатное объявление, логотип, визитка, папка, фирменная ручка. Вы просто будете знать, что работает, а что нет.
Бонус
Классный ролик про тени (есть русские субтитры)
Попробуйте угадать, какого цвета эти квадраты (а потом проверьте значение HEX-кода в Фотошопе):
Источники:
Иоханнес Иттен, «Искусство цвета»
A Simple Web Developer’s Color Guide
Круг Иттена для качественного дизайна
Специалисты постоянно ищут уникальные цветовые решения для сайтов, которые будут интересны и привлекательны для пользователей.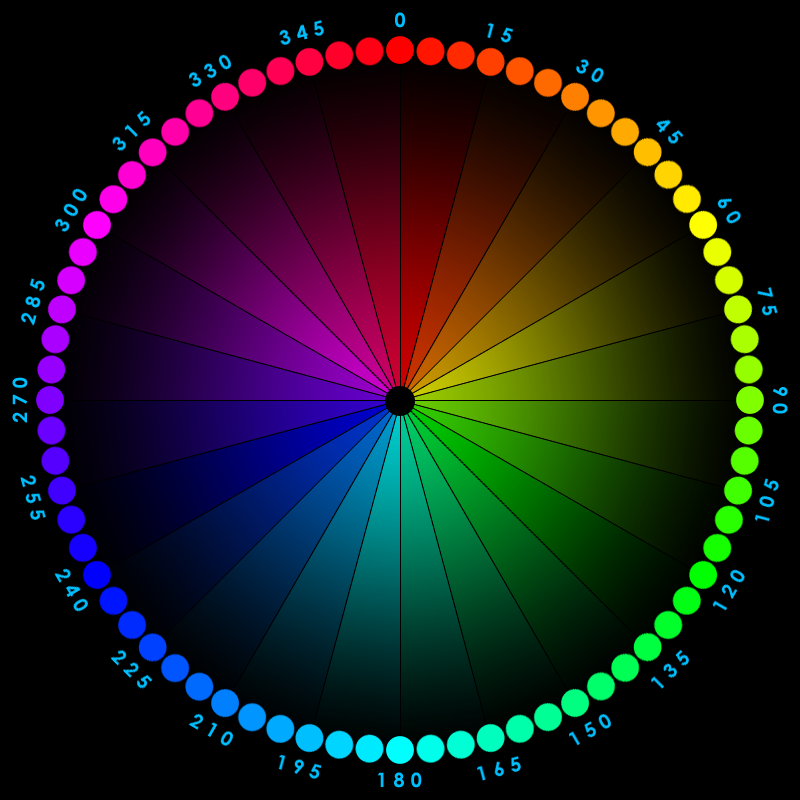 Эффективная реклама не может обойтись без ярких баннеров, а работа блогера зависит от красочности фотографий и креативов — все это влияет на качество продвижения товаров, услуги и личного бренда.
Эффективная реклама не может обойтись без ярких баннеров, а работа блогера зависит от красочности фотографий и креативов — все это влияет на качество продвижения товаров, услуги и личного бренда.
Работа с цветом может показаться сложной, но это лишь на первый взгляд. Главное — разобраться в основах. Если у вас, как и у автора данного материала, нет четкого понимания, с чего нужно начинать, давайте разбираться вместе на основе инструмента — круга Иттена.
Что такое круг Иттена
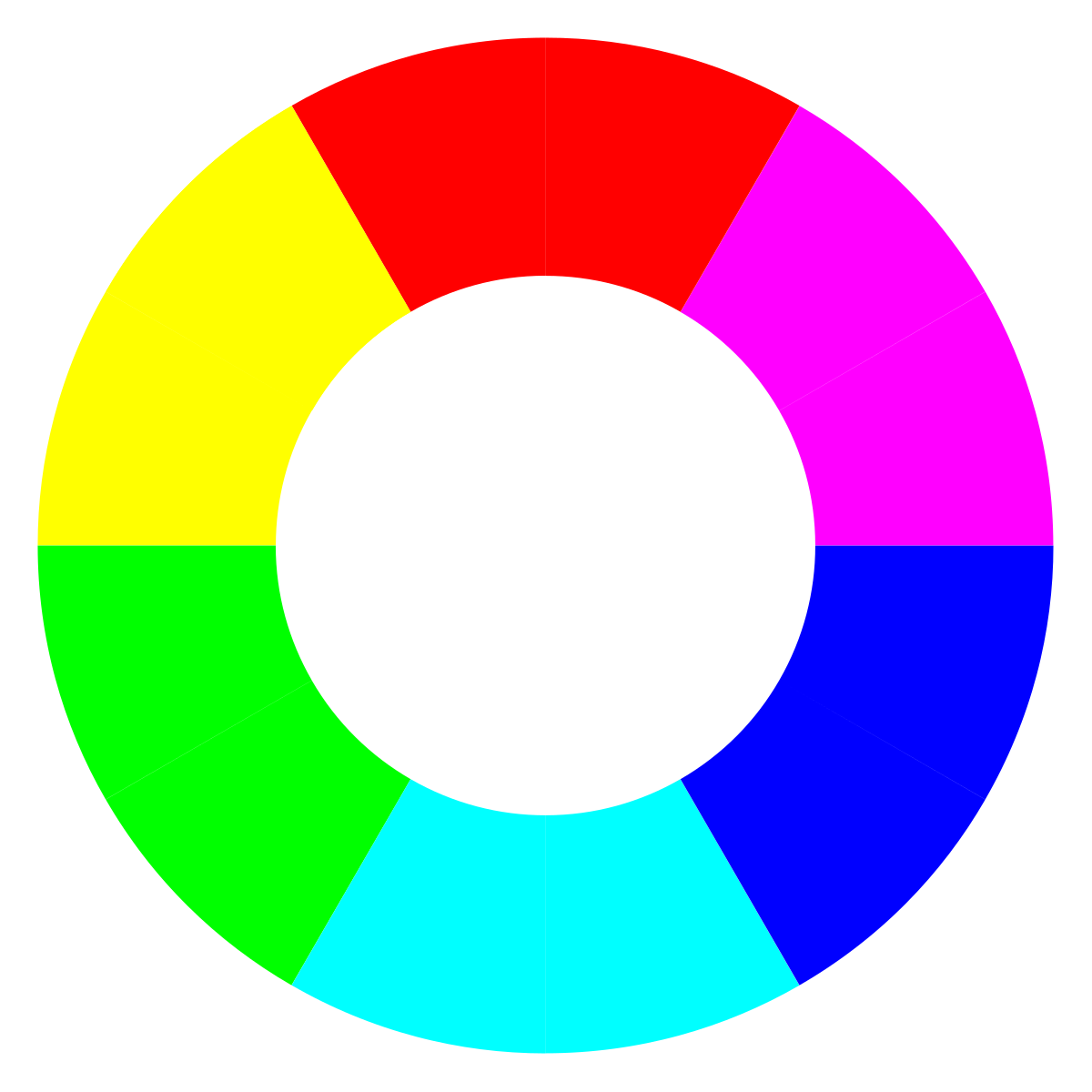
Цветовой круг Иттена — это графическая схема из 12 цветовых секторов для поиска грамотного сочетания оттенков. Она разделяется на первичные и вторичные цвета, а также на холодные и теплые тона.
Примечание. Назван в честь швейцарского художника Иоганнеса Иттена, который переработал классическую цветовую схему. Он применил в своей работе не только знания из сферы искусства, но и химии, психологии и физики.
Круг цветовых сочетаний. ИсточникОбозначения цветов в круге и их значения
Первичные, или основные — это синий, желтый и красный цвет. Их нельзя получить путем смешивания, поэтому они расположены в центре.
Их нельзя получить путем смешивания, поэтому они расположены в центре.
Вторичные, или дополнительные — получаются за счет смешивания двух цветов.
- Желтый + Синий = Зеленый
- Желтый + Красный = Оранжевый
- Красный + Синий = Фиолетовый
Третичные, или составные — смешивание основных и дополнительных цветов.
Примеры:
- Желтый (первичный) + Зеленый (вторичный) = Желто-зеленый
- Красный (первичный) + Оранжевый (вторичный) = Красно-оранжевый
На практике можно использовать вариации основных цветов — к примеру, от ярко-желтого до темно-желтого, чтобы получить собственный круг Иттена с новой гаммой.
Как устроены цвета круга:
- Максимально контрастные цвета находятся на максимальном отдалении друг от друга.
- Оттенки от зеленого до малинового являются холодными.
- Тона от красного до желто-зеленого — теплыми.
Цветовой круг Иттена для дизайнеров — значение
Он является помощником для тех, кто только начинает изучать цветовые решения и не до конца понимает, как именно палитра влияет на стиль и дизайн.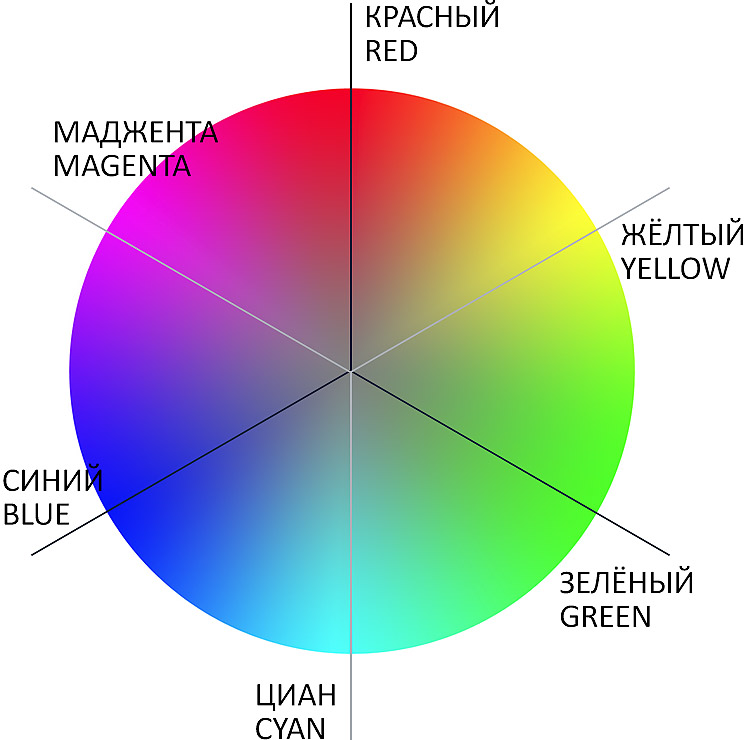
Схему Иттена можно использовать везде: в фотографиях, видео, иллюстрациях, картинах, в дизайне сайтов, при подборе наряда, в интерьере и многом другом. Таким образом вы можете каждый день тренировать глаз и свое восприятие гармонии оттенков.
Простой, но мощный конструктор лендингов
Создайте мобильный лендинг, интернет-магазин или мультиссылку для Instagram и продвигайте ее через чат-боты в мессенджерах, email и SMS — все это на одной платформе!
Создать лендинг
Цветовой круг для дизайнеров — это возможность визуализировать комбинацию оттенков и понять, какие контрастные элементы нужно добавить на сайт и какой выбрать фон.
Несколько особенностей при работе с цветом, которые также отмечал Иттен в своей книге «Искусство цвета»:
- Если вы хотите получить сочетание двух цветов — используйте их в равных пропорциях.
- Когда нужно выделить какой-то цвет или субъект среди прочих элементов — добавьте монохромный фон. На сайте будет уместно расположить зеленые кнопки на белом фоне.
 На фотографии — синее небо и человек в оранжевом костюме.
На фотографии — синее небо и человек в оранжевом костюме. - При использовании трех цветов сконцентрируйте внимание на одном оттенке, а два других добавляйте акцентами. Все в разных пропорциях — например, в соотношении 60% x 25% x 15%.
- Белый сочетают с любыми цветами и оттенками.
- Черный можно сочетать с любыми, но лучше с мягкими и яркими оттенками.
Основные комбинации на круге Иттена
В этом разделе мы обсудим варианты использования круга. Существует четыре основных типа сочетания цветов. Для каждого из них используют геометрические фигуры — линия, треугольник, квадрат, прямоугольник, которые можно поворачивать и получить новые комбинации оттенков.
Комплементарная комбинация из двух оттенков
Это сочетание двух противоположных цветов. Например, желтый и фиолетовый. Подобные комбинации считаются гармоничными и приятными для глаз. Выбранные цвета можно использовать в равных пропорциях.
Пример: выбор контрастных цветов для кнопки и текста — CTA.
Постер к фильму «Бойцовский клуб». Комбинация из двух основных цветов — зеленый и розовый.
Вариант постера с двумя основными цветами. ИсточникТриада
Разделяют два вида триад, в которых совмещаются три противоположных оттенка:
- Контрастная — относится к комплементарной комбинации, но дополнительный цвет заменяется двумя другими, расположенными рядом. Это менее контрастное сочетание.
Пример контрастной триады - Классическая — берутся три цвета, равноудаленных друг от друга. В итоге получается сбалансированная гамма, в которой оттенки используются в разных пропорциях: один тон задает композицию, второй — обыгрывает ее, а третий добавляется как акцент.
Пример классической триады
Постер фильма «Кролик Джоджо». В простой иллюстрации в качестве фона задействован основной цвет — красный, а акценты сделаны с помощью голубого и желтого.
Вариант изображения с использованием классической триады. ИсточникМонохромная
Ее также называют аналоговой триадой. Она допускает сочетание от трех до пяти соседних цветов с мягкими переходами и без резкого контраста. Комбинацию можно считать своеобразным градиентом — цвета плавно переходят друг в друга.
Она допускает сочетание от трех до пяти соседних цветов с мягкими переходами и без резкого контраста. Комбинацию можно считать своеобразным градиентом — цвета плавно переходят друг в друга.
Постер к фильму «Джон Уик», который оформлен в аналоговых цветах — плавный переход от фиолетового к оранжевому.
Вариант постера с монохромной палитрой. ИсточникПолихромная
Использование четырех цветов. Чтобы грамотно вписать все цвета — потребуется изучение правил колористики. Комбинации бывают двух видов:
- Квадратная схема — гармоничное и яркое сочетание равноудаленных цветов. Ее можно использовать, например, при разработке ярких сайтов со сложной структурой.
Пример квадратной схемы - Прямоугольная схема — еще одно сочетание комплементарных цветов: пары оттенков находятся близко друг к другу. Один оттенок становится доминирующим, а остальные — вспомогательными.
Пример прямоугольной схемы
Постер фильма «Однажды в Голливуде».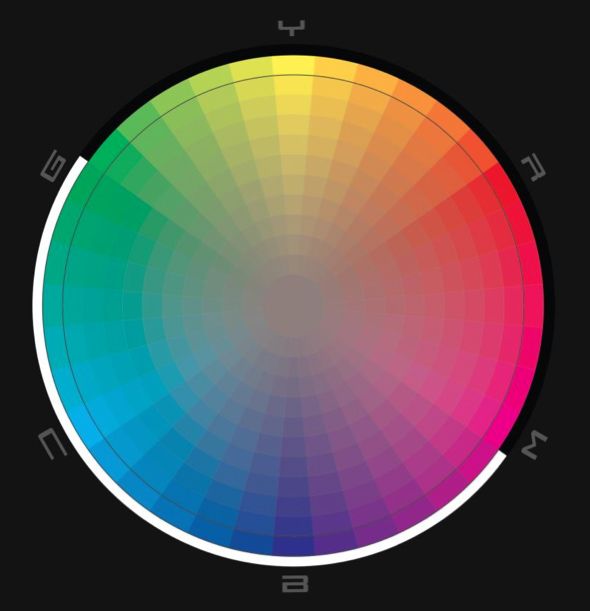 Главный цвет, который используется в качестве фона, — красный. Дополнительные оттенки — голубой, зеленый и желтый.
Главный цвет, который используется в качестве фона, — красный. Дополнительные оттенки — голубой, зеленый и желтый.
Характеристика цвета
Цвет не ограничивается кругом Иттена из 12 оттенков. В этом разделе разберемся в разновидностях цвета и его характеристиках.
Цвета делят на:
- Хроматические — цветные.
- Ахроматические — белые, серые и черные оттенки.
Качественные характеристики цвета
Цвет может меняться в сторону насыщенности, тона или светлоты. Рассмотрим эти характеристики подробнее.
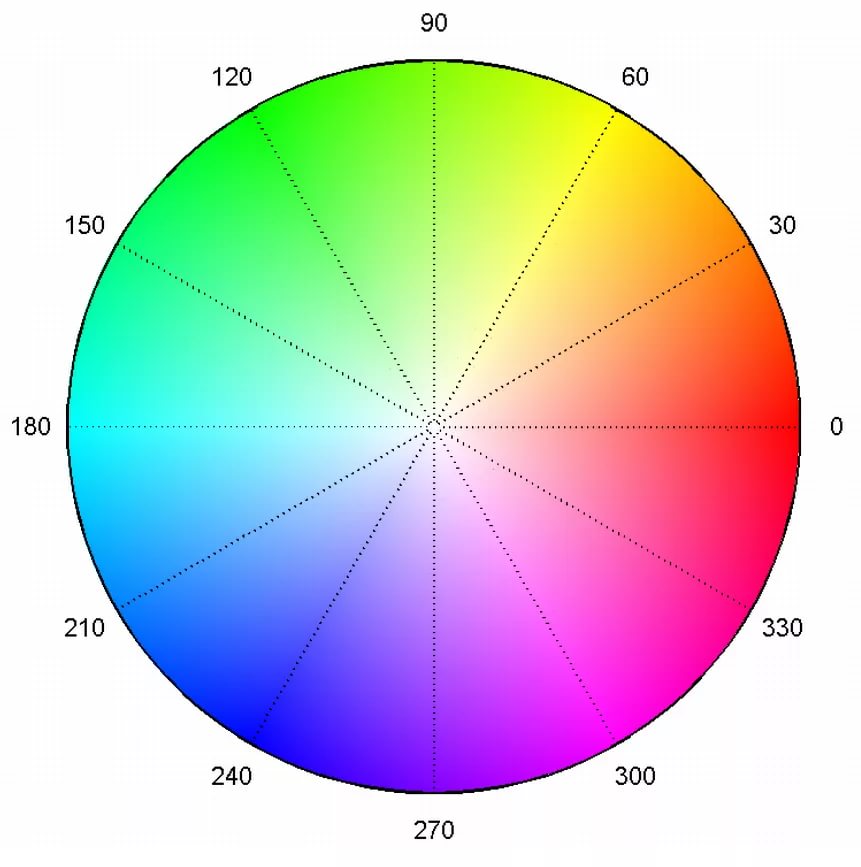
Цветовой тон
Это место цвета в световом спектре. Помогает определить оттенок, дать ему название и сравнить его с остальными.
Световой спектрНасыщенность
Помогает определить контрастные яркие или тусклые цвета. Насыщенность зависит от примеси серого оттенка.
Пример насыщенностиСветлота
Ее также называют яркостью. Именно она определяет, каким будет цвет: светлым или темным.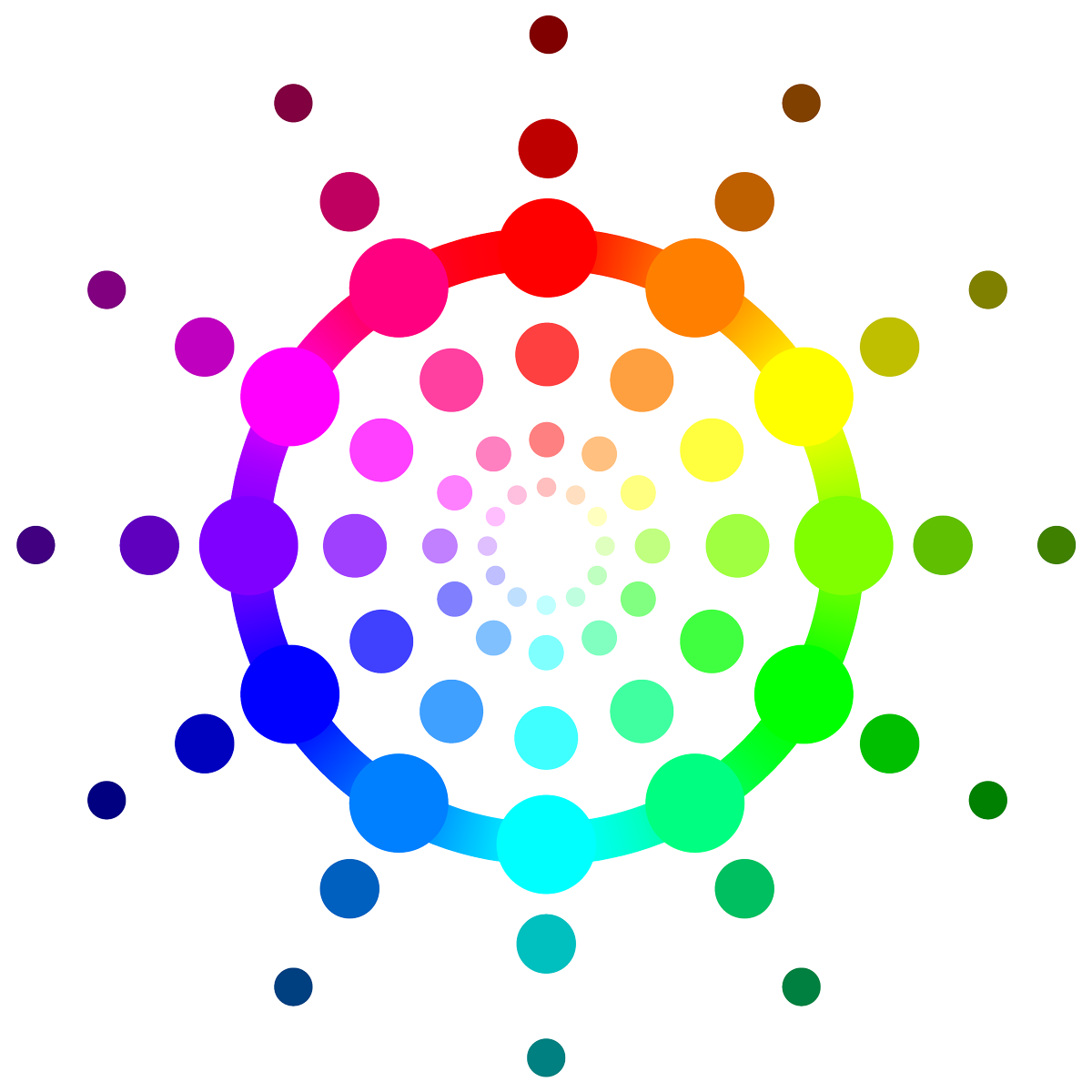 Зависит от примеси белых или черных оттенков.
Зависит от примеси белых или черных оттенков.
Инструменты для выбора палитры
Чтобы вы могли быстро найти нужные оттенки и определить цвета для проекта — используйте онлайн-инструменты. Все представленные ниже сервисы являются бесплатными и не требуют регистрации.
Paletton
Paletton — инструмент на английском языке, который позволяет подобрать оттенки из основных комбинаций цветов.
Особенности:
- Настройка параметров насыщенности и светлоты.
- Просмотр вариантов дизайна страницы.
- Создание собственных цветовых схем.
- Тонкая настройка по четырем параметрам: оттенок, насыщенность, яркость и контраст.
- Просмотр информации о цветовых режимах — RGB, LAB.
- Экспорт цветовой гаммы для сайта в формате кода.
Adobe Color
Adobe Color — сервис от Adobe, который постоянно обновляется новыми возможностями.
Особенности:
- Сохранение палитры в облачном хранилище для дальнейшего использования в сервисах Adobe.
- Возможность настраивать яркость и каждый параметр цветового режима — RGB, LAB, HSB, CMYK.
- Есть инструмент для определения контрастности фона, текста и графических элементов.
ColorScheme
ColorScheme — функционал аналогичен представленному в Paletton, полностью русскоязычное меню.
Особенности:
- Проверка цветовой гаммы на странице сайта.
- Тонкая настройка — насыщенность, яркость и контрастность.
- Показывает основные и вторичные цвета.
- Есть возможность запустить рандом и выбрать оттенки случайным образом.
- Сохранение в формате PNG, таблицы стилей, палитры или HTML.
- Настройка палитры для людей с ограниченными возможностями.
getColor
getColor — красивый инструмент для быстрого поиска цветовых сочетаний.
Особенности:
- Настройка тона, насыщенности и яркости.
- Современный дизайн инструмента.

- Предоставляет на выбор четыре комбинации цвета по Иттену.
- Простое управление.
- Есть возможность скопировать номер оттенка.
Заключение
В этой статье мы рассмотрели круг Иттена, узнали цветовых комбинациях и характеристиках цвета.
- Круг состоит из 12 цветов, но в него включены не все оттенки — поэтому смело используйте онлайн-инструменты для подбора идеальных комбинаций.
- Помните, что два оттенка можно сочетать в равных пропорциях, а для трех и более — используйте разное соотношение.
- Черный и белый можно использовать как дополнительные цвета. Они сочетаются с любыми гаммами.
- Не забывайте настраивать тон, насыщенность и светлоту цвета.
- Проверяйте цветовые сочетания, которые окружают вас — так вы быстрее натренируете глаз и сможете интуитивно находить новые интересные комбинации оттенков.
Используйте цвет в каналах коммуникации с клиентами — регистрируйтесь в сервисе SendPulse и создавайте яркие мультиссылки через конструктор лендингов, отправляйте привлекательные email, Viber, SMS, WhatsApp рассылки и push уведомления, настраивайте чат-боты в мессенджерах Facebook Messenger, ВКонтакте, WhatsApp и Telegram, а также подключайте бесплатную CRM-систему!
[Всего: 16 Средний: 5/5]Цветовой круг для рисования в программе Adobe Photoshop
Работая в компьютерных программах для рисования, мы все видели удобный цветовой круг или иные его ответвления , как пример посмотрите на цветовые круги Corel Painter и ArtRage:
Adobe пошла по своему пути и сделала сложную систему (для рисования) доступа к цветам. Приходится нажимать на пиктограммы цвета и выбирать там цвет. Каждый ускорял работу как мог – добавлял нужные цвета на край холста, «смешивал» и потом пипеткой выбирал цвет, еще делались «пресеты» в меню образцов… В новых версиях Photoshop добавили быстрый вызов цветов через комбинацию Аlt-Shift-правый клик.
Приходится нажимать на пиктограммы цвета и выбирать там цвет. Каждый ускорял работу как мог – добавлял нужные цвета на край холста, «смешивал» и потом пипеткой выбирал цвет, еще делались «пресеты» в меню образцов… В новых версиях Photoshop добавили быстрый вызов цветов через комбинацию Аlt-Shift-правый клик.
В целом было неудобно, но главное что этот минус устраняется «расширениями». В интернете, на данный момент, можно найти много видов цветовых кругов (даже с «подвязкой» к интернету, генерирующие цветовые решения, но такое нас не интересует). И многие платные, а вот один простой «как 5 копеек» восьмисекторный цветовой круг с градиентной растяжкой – PaintersWheel с сайта LenWhite.com .
Ссылка на скачивание — http://nerdchallenge.com/lenwhite/LenWhite.com/LenWhite.com/Entries/2012/9/16_PW_CS6.html
Скачиваем, устанавливаем через Адоб или скопировав файлы в папку Plug-ins ( у меня путь выглядит C:\Program Files\Adobe\Adobe Photoshop CS6 (64 Bit)\Plug-ins\Panels\PaintersWheel\PaintersWheel_CS6).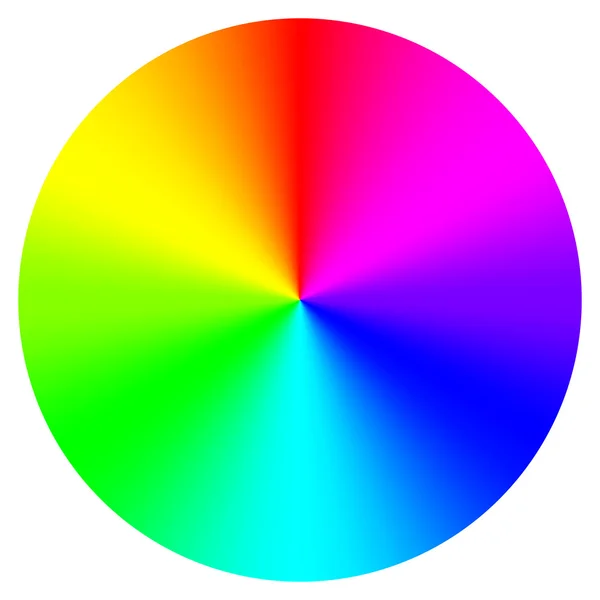 Запускаем Фотошоп и включаем расширение через окно — расширения – PaintersWheel — готово!
Запускаем Фотошоп и включаем расширение через окно — расширения – PaintersWheel — готово!
Дальше все просто – выбираем цвет и рисуем, я расположил расширение к цветам и образцам.
Видеозапись использования цветового круга
Этого цветового круга хватает «с головой», конечно хотелось бы еще информации по цветам (разные номера раскладки цветового охвата), но расширение распространяется бесплатно, на это скажем «спасибо» разработчику.
Но для работы с веб или графическим дизайном, лучше подходит стандартное цветовой инструмент, т.к. тут сильно зависит от контроля цветов, особенно если они у вас прописаны в брендбуке или другой документации. Так же, при работе с наружной рекламой или подготовкой векторной продукции в цветовом охвате CMYK важно контролировать все данные цвета, т.к. это очень важный момент при работе. А рассмотренный выше цветовой круг позволяет комфортно работать при рисовании с графического планшета, или компоновок макетов.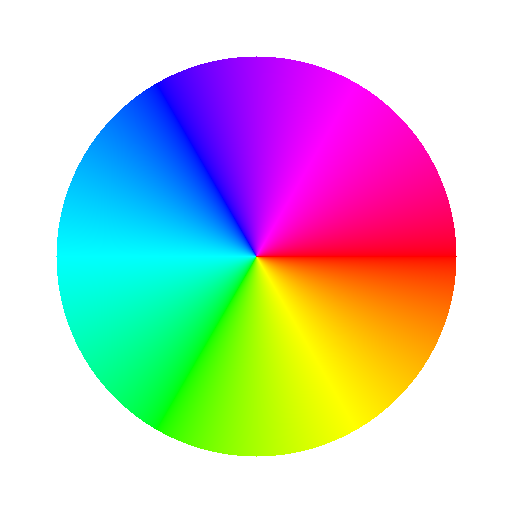
Обновление:
Обновление: в версиях СС продуктов Адоби, некоторые расширения потеряли свою актуальность, т.к. программы перешли на другой «язык» написания дополнений (ранее это был флеш, а теперь это хтмл), поэтому статья актуальна для версий продуктов CS6 и ниже.
Обновление 2:
В новой версии Adobe Photoshop CC 2019, цветовой круг есть в самой программе, включается в дополнительном раскрывающемся меню на панели Цвет — Цветовой круг
С уважением Чубаров Н.
<= поделись статьей с друзьями ;3
Не удается найти страницу | Autodesk Knowledge Network
(* {{l10n_strings.REQUIRED_FIELD}})
{{l10n_strings.CREATE_NEW_COLLECTION}}*
{{l10n_strings.ADD_COLLECTION_DESCRIPTION}}
{{l10n_strings.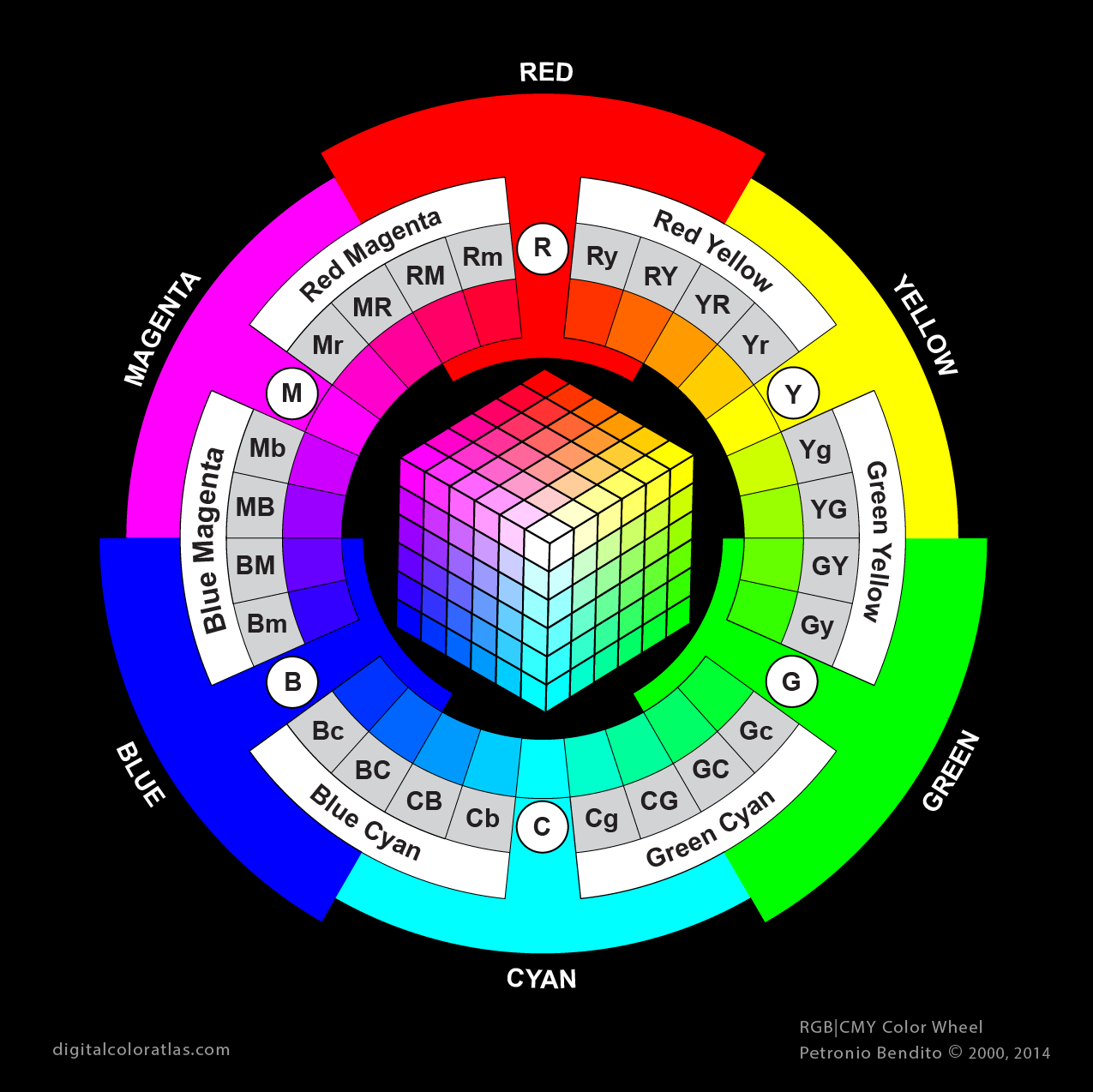 COLLECTION_DESCRIPTION}}
{{addToCollection.description.length}}/500
{{l10n_strings.TAGS}}
{{$item}}
{{l10n_strings.PRODUCTS}}
{{l10n_strings.DRAG_TEXT}}
COLLECTION_DESCRIPTION}}
{{addToCollection.description.length}}/500
{{l10n_strings.TAGS}}
{{$item}}
{{l10n_strings.PRODUCTS}}
{{l10n_strings.DRAG_TEXT}}
{{l10n_strings.DRAG_TEXT_HELP}}
{{l10n_strings.LANGUAGE}} {{$select.selected.display}}{{article.content_lang.display}}
{{l10n_strings.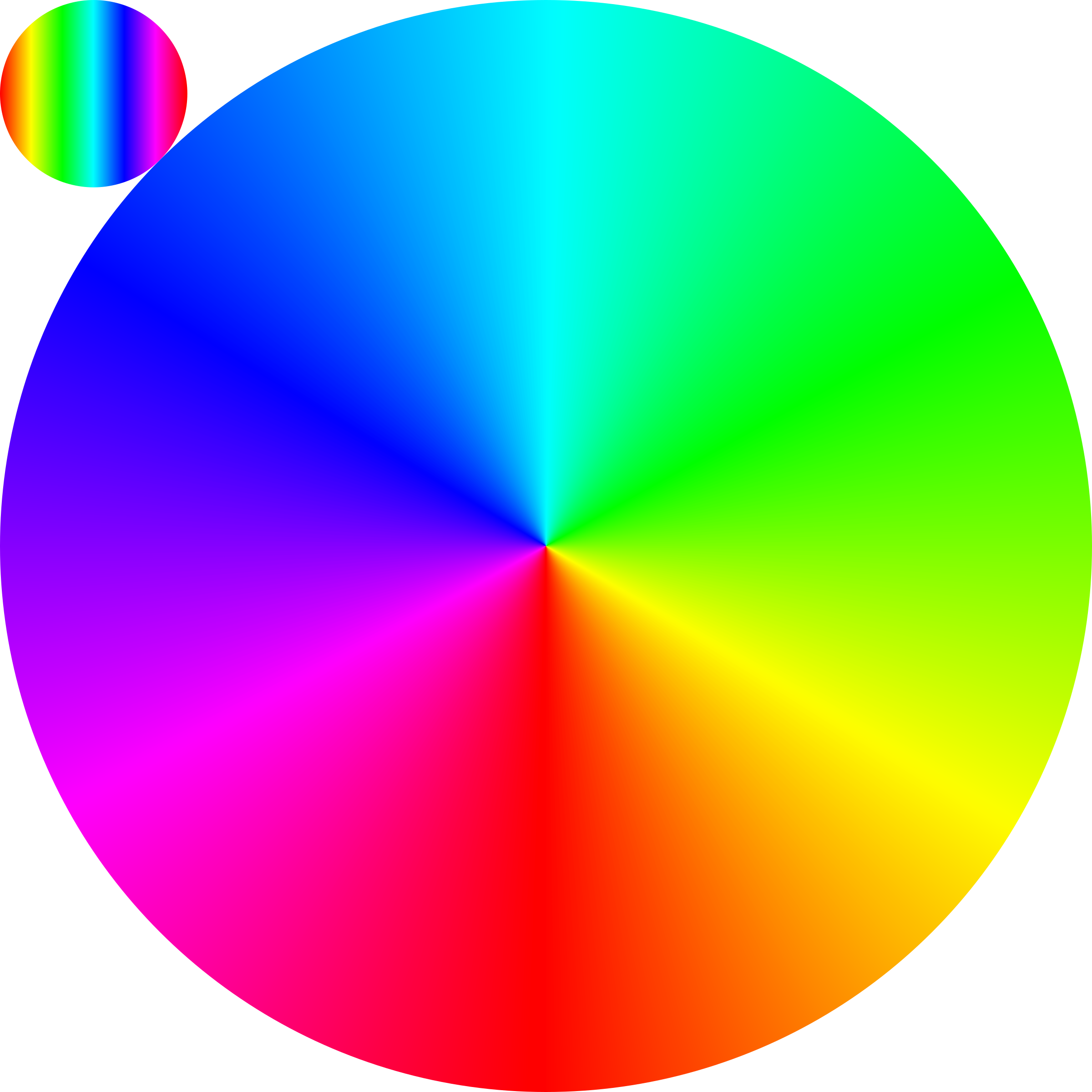 AUTHOR}}
AUTHOR}}
{{l10n_strings.AUTHOR_TOOLTIP_TEXT}}
{{$select.selected.display}} {{l10n_strings.CREATE_AND_ADD_TO_COLLECTION_MODAL_BUTTON}} {{l10n_strings.CREATE_A_COLLECTION_ERROR}}Статья «Цветовой круг (И.Иттен) инструмент работы с гармонией цвета» раздела «Советы дизайнеров»
Автор: Алла Бабай, дизайнер интерьера
Цвет – это один из самых мощных инструментов в дизайне, причем не имеет значения сфера его применения, будь то комплект одежды или проектирование интерьера. Возможности цвета безграничны: он меняет настроение, габариты предметов и пространства.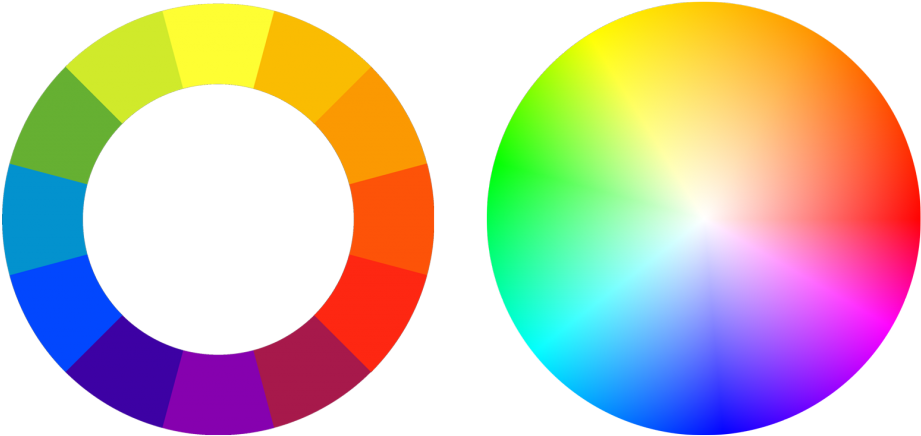
Работа с цветом основывается на определенных принципах, разрабатываемых физиками с XVII века. Исаак Ньютон выделил семь цветов радужного спектра, Т.Янг доказал, что свет разделяется на три основных спектральных цвета, а остальные оттенки получаются при смешении. Далее Г.Гельмгольц, И.В.ф.Гете, В.Освальд и И.Иттен разработали свои системы, благодаря которым каждый может находить гармоничные сочетания.
Чаще пользуются цветовым кругом Иттена. В нем выделяется основная триада: красный, желтый и синий. Эти цвета невозможно получить смешением. Комбинация из них образует вторичную триаду: зеленый, оранжевый и фиолетовый. Если смешать близлежащие цвета основной и вторичной триад, появляются промежуточные цвета. Они образуют дополнительные триады.
Есть несколько простых правил:
Также цвета делятся по теплоте. Теплые цвета расположены от красного до желто-зеленого, а холодные – от зеленого до пурпурного. Классифицируют цвета и по цветности. Черный, серый и белый – ахроматические (т.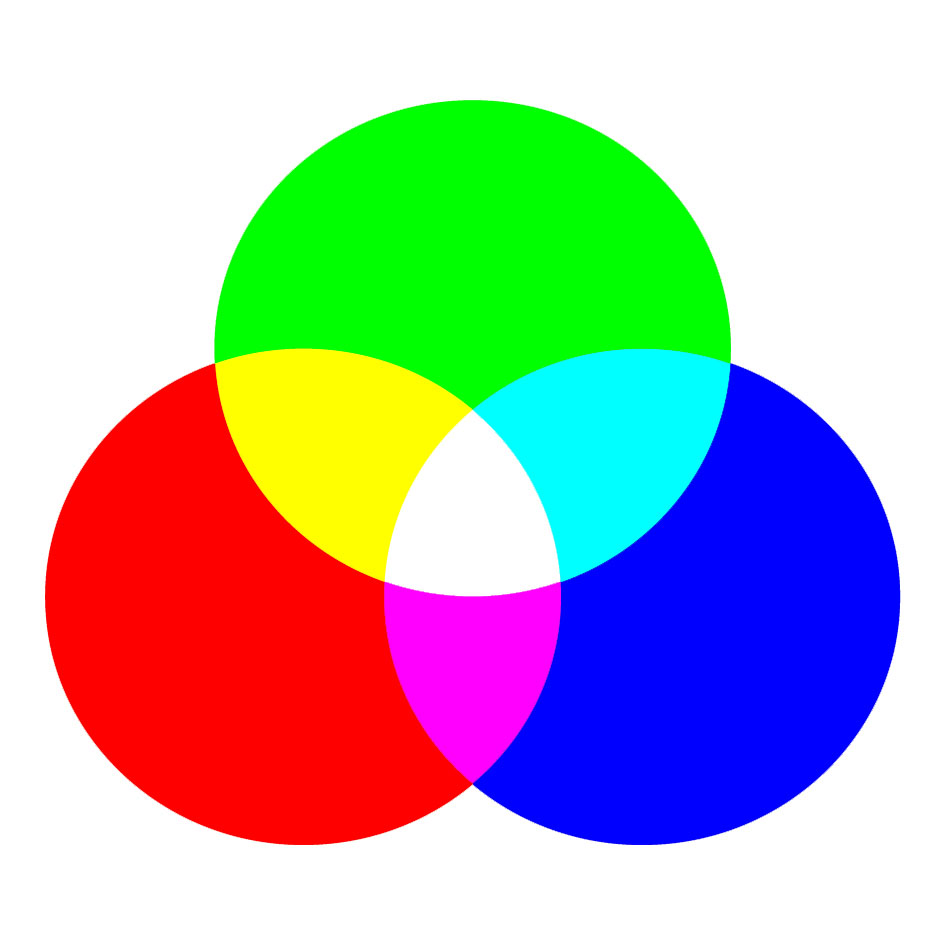 е. бесцветные), остальные — хроматические (обладающие цветом).
е. бесцветные), остальные — хроматические (обладающие цветом).
Также важные характеристики — насыщенность (т.е. отличие от ахроматического цвета) и светлота, яркость (т.е. положение на шкале от белого к черному).
Используя перечисленные параметры цвета, можно компоновать миллионы сочетаний. Таким образом, коричневый (обозначим его как темный теплый оттенок) будет гармоничен не только с бежевым. И всегда найдется яркий акцент цвета фуксии, ультрамарин или другой из радуги, что радует нас после затяжного грустного дождя. Один из кругов в иллюстрациях — для ваших экспериментов!
Статья про цветовой круг Иттена, Ньютона, Гёте, Освальда.
Круг И.Ньютона
Цветовой круг Иттена один из основных инструментов дизайнера. Наверное, каждый, работающей в сфере дизайна и моды не раз сталкивался с понятием «цветовой круг», но мало кто знает, кто стоит у истоков данного творения.
Первым, кто исследовал свойства цвета был И. Ньютон. На основании его работ, стало известно, что белый цвет, который, по его мнению, единственный объективно существует в природе распадается на семь составляющих.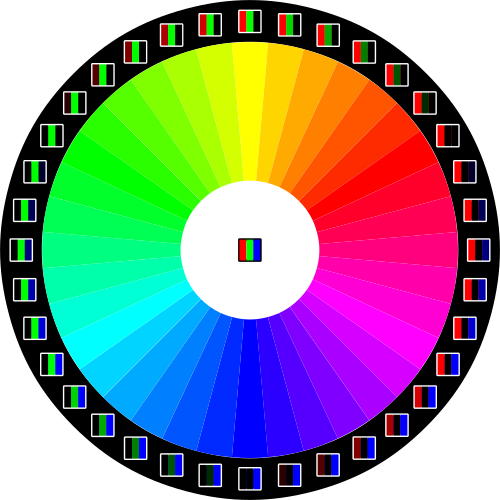 Красный, оранжевый, желтый, зеленый, голубой, синий, фиолетовый – основные цвета, составляющие радугу. Ньютон описал модель цветового круга по аналогии музыкальной модели, разделив окружность на 7 частей, пропорциональных музыкальным тонам.
Красный, оранжевый, желтый, зеленый, голубой, синий, фиолетовый – основные цвета, составляющие радугу. Ньютон описал модель цветового круга по аналогии музыкальной модели, разделив окружность на 7 частей, пропорциональных музыкальным тонам.
Круг Гёте
У поэта и мыслителя — Иога́нн Во́льфганг фон Гете, другой взгляд. По его мнению, цвет объективно существует в природе, он реален. Гёте выявил чистые цвета – которые нельзя получить путем смешивания (красный, желтый, синий) и смешанные, число которых неограниченно. Все они плавно перетекают из одного оттенка в другой и находятся на стыках между чистыми цветами. Более того, И. В. Гёте выдвинул предположение о том, что один, из существующих цветов, не входящих в число радужных является продолжением фиолетового и началом красного. Таким образом, Гёте замкнул радугу и создал свой цветовой круг (хотя иногда данный этап приписывают И. Ньютону, называя 8-ми цветовой круг «Цветовым кругом И. Ньютона»).
Круг Иттена
Круг В. Освальда
Освальда
Круг Иттена получил наибольшую популярность в мире художников и дизайнеров.
Не менее известен и цветовой круг Вильгельма Освальда, представляющий собой непрерывный спектральный цветовой круг. Основными цветами в нем являются так же 3 цвета, но это уже красный, синий и зеленый – стоящие в основании современной модели цвета RGB. А белый и черный цвета в чистом виде отсутствуют. Они трактуются как полное отсутствие цвета – белый, или же, как максимальная насыщенность цвета — черный цвет.
Цветовой круг прошел долгий путь, прежде чем приобрел привычный нашему глазу вид и вошел в обиход. Но, независимо от того, кому мы приписываем создание цветового круга, и кому в большей степени признательны современные дизайнеры, цветовой круг — это прежде всего инструмент колористики.
Но, независимо от того, кому мы приписываем создание цветового круга, и кому в большей степени признательны современные дизайнеры, цветовой круг — это прежде всего инструмент колористики.
Цветовой круг Онлайн
Amazon.com: 10,2-дюймовая RGB-подсветка для селфи, кольцевая светодиодная подсветка с подставкой для штатива и держателем для телефона, настольная круглая подсветка для видео на YouTube, TikTok, прямой эфир, макияж
4,0 из 5 звезд
Недорого сделанный стенд ** ПОЛОЖИТЕЛЬНОЕ ОБНОВЛЕНИЕ!
Автор LKG 24 марта, 2020
На заметку:
Подставка хоть и сверхлегкая, но довольно дешевая. Затягивание — это поворот, поэтому нет застежек на заметку. Подставка может неожиданно соскользнуть, если ее неправильно затянуть.
Я уверен, что он заметил это, но я это пропустил. Это USB-плагин, поэтому вам нужен конвертер, который отлично подходит для универсального использования, так как у большинства вилок есть USB-подключение, но если у вас нет дополнительного двухконтактного преобразователя / блока, это не сильно поможет: /
Размер кольца 10.2 ”, но это ЯВЛЯЕТСЯ снаружи, как показано на рисунке, просто чтобы отметить, если вы ищете что-то большее. (Мне это показалось нормальным)
Я не смог протестировать контроллер Bluetooth, потому что, как только я заметил, что держатель телефона непригоден, я отказался от попыток что-нибудь еще.
Хороший свет, но не по цене, а по качеству.
ОБНОВЛЕНИЕ:
ОТЛИЧНОЕ ОБСЛУЖИВАНИЕ КЛИЕНТОВ! После этого обзора они обратились к нам и были очень добры. Предложили заменить кольцевой свет.Теперь, когда все части работают, все работает отлично! То же самое относится и к подставке (она очень легкая). Я считаю, что она отлично подходит для использования в помещении. Я пошел дальше и купил отдельную стойку, которая имела больший вес, чтобы использовать ее на улице. Сам по себе свет потрясающий, а разноцветные огни отлично подходят для фотографий или просто как забавный свет в углу вашей комнаты для освещения настроения. Я все еще даю ему только 4 звезды, так как это все еще довольно легкий продукт, но он не отражает сам свет.Надеюсь, это было полезно всем, кто искал!
Предложили заменить кольцевой свет.Теперь, когда все части работают, все работает отлично! То же самое относится и к подставке (она очень легкая). Я считаю, что она отлично подходит для использования в помещении. Я пошел дальше и купил отдельную стойку, которая имела больший вес, чтобы использовать ее на улице. Сам по себе свет потрясающий, а разноцветные огни отлично подходят для фотографий или просто как забавный свет в углу вашей комнаты для освещения настроения. Я все еще даю ему только 4 звезды, так как это все еще довольно легкий продукт, но он не отражает сам свет.Надеюсь, это было полезно всем, кто искал!
Круговой график | Федеральная комиссия связи
Circle Plot создает настраиваемый файл KML, который затем открывается в Google Планета Земля и других браузерах с поддержкой KML или открывается как текстовый файл. Браузер KML необходимо загрузить и установить отдельно от этой программы. Пользователь может указать до четырех концентрических радиусов и установить метки для маркера центральной точки.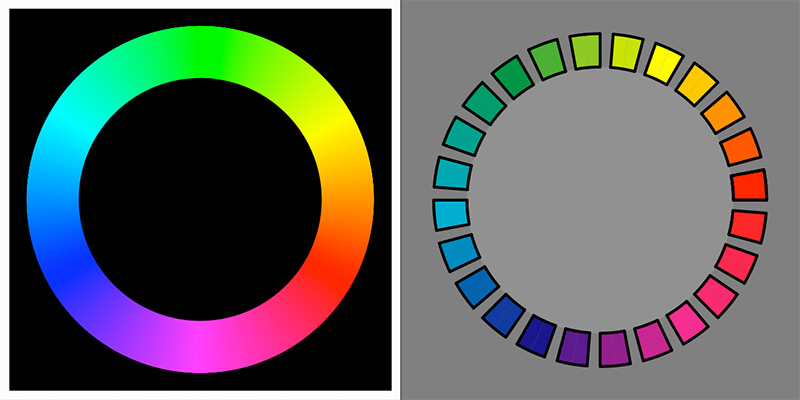 Для большей точности используйте координаты NAD83 или WGS84.Введите градусы долготы как отрицательные для западной долготы и градусы широты как отрицательные для южной широты. Это обычное использование для большинства программ GIS .
Для большей точности используйте координаты NAD83 или WGS84.Введите градусы долготы как отрицательные для западной долготы и градусы широты как отрицательные для южной широты. Это обычное использование для большинства программ GIS .
На этой странице используется Javascript. Вы должны разрешить вашему браузеру запускать сценарии на этой странице для достижения наилучших результатов.
Шаги по использованию этого генератора KML достаточно просты:
Круги не являются настоящими кругами, они нарисованы как линии, соединяющие 360 точек на окружности с азимутом 1 ° от центральной точки. FCC не налагает никаких ограничений на использование этих файлов KML, однако вы по-прежнему обязаны проверять политики и документацию для вашего картографического браузера в отношении любых ограничений на использование и совместное использование карт, созданных с помощью этого программного обеспечения. Комментарии и предложения относительно Circle Plot можно направлять Дейлу Бикелю, [email protected].
|

Обновлено:
14 сентября 2020 г., понедельник
Обнаружение круга на основе нескольких меток и его применение для надежной внешней калибровки камер RGB-D
Датчики(Базель).2019 Apr; 19 (7): 1539.
Youngbae Hwang
2 Исследовательский центр интеллектуальной обработки изображений, Корейский институт электронных технологий, Кенги-до 13488, Корея; rk. er.itek@gnawhby
er.itek@gnawhby
Поступило 16.02.2019; Принято 26 марта 2019 г.
Лицензиат MDPI, Базель, Швейцария. Эта статья представляет собой статью в открытом доступе, распространяемую в соответствии с условиями лицензии Creative Commons Attribution (CC BY) (http: // creativecommons.org / licenses / by / 4.0 /). Эту статью цитировали в других статьях в PMC.Abstract
Камеры RGB-Depth (RGB-D) широко используются в приложениях компьютерного зрения и робототехники, таких как 3D-моделирование и взаимодействие человека с компьютером. Чтобы захватывать трехмерную информацию об объекте одновременно с разных точек обзора, нам нужно использовать несколько камер RGB-D. Чтобы свести к минимуму затраты, камеры часто распределяются редко, без общих элементов сцены. Благодаря тому, что они видны с разных точек зрения, сферические объекты использовались для внешней калибровки широко разнесенных камер. Предполагая, что спроецированная форма сферического объекта круглая, в этой статье представлен метод на основе нескольких сигналов для обнаружения круглых областей в одноцветном изображении. Экспериментальные сравнения с существующими методами показывают, что предлагаемый нами метод точно обнаруживает сферические объекты с загроможденным фоном при различных условиях освещения. Затем метод обнаружения круга применяется к внешней калибровке нескольких камер RGB-D, для которой мы предлагаем использовать надежные функции стоимости, чтобы уменьшить ошибки из-за неправильно обнаруженных центров сфер.С помощью экспериментов мы показываем, что предлагаемый метод обеспечивает точные результаты калибровки при наличии выбросов и работает лучше, чем метод, основанный на наименьших квадратах.
Предполагая, что спроецированная форма сферического объекта круглая, в этой статье представлен метод на основе нескольких сигналов для обнаружения круглых областей в одноцветном изображении. Экспериментальные сравнения с существующими методами показывают, что предлагаемый нами метод точно обнаруживает сферические объекты с загроможденным фоном при различных условиях освещения. Затем метод обнаружения круга применяется к внешней калибровке нескольких камер RGB-D, для которой мы предлагаем использовать надежные функции стоимости, чтобы уменьшить ошибки из-за неправильно обнаруженных центров сфер.С помощью экспериментов мы показываем, что предлагаемый метод обеспечивает точные результаты калибровки при наличии выбросов и работает лучше, чем метод, основанный на наименьших квадратах.
Ключевые слова: камера RGB-D, внешняя калибровка, сферический объект, обнаружение круга, множественные метки, робастная оценка
1. Введение
Камера RGB-D представляет собой тесно связанную пару из одной камеры глубины и одной цветная камера._html_m62a77803.png) Благодаря преимуществам предоставления информации о цвете и глубине в реальном времени, камеры RGB-D широко используются во многих задачах компьютерного зрения и робототехники, таких как оценка позы человека или руки [1,2], плотное 3D-моделирование окружающей среды [ 3], а также одновременная локализация и отображение [4].
Благодаря преимуществам предоставления информации о цвете и глубине в реальном времени, камеры RGB-D широко используются во многих задачах компьютерного зрения и робототехники, таких как оценка позы человека или руки [1,2], плотное 3D-моделирование окружающей среды [ 3], а также одновременная локализация и отображение [4].
Одна камера RGB-D может захватывать полную трехмерную информацию о статическом объекте или окружающей среде. Мы можем перемещать камеру для захвата нескольких пар цветных изображений и изображений глубины с разных точек обзора. Части трехмерной информации отдельных изображений глубины затем объединяются вместе с использованием итеративного алгоритма ближайшей точки [3] или путем сопоставления характеристик на изображениях [4] для создания плотной трехмерной модели объекта или окружающей среды.
После полной калибровки камеры RGB-D полученные трехмерные точки можно сопоставить с соответствующими пикселями на цветных изображениях, чтобы обеспечить отображение текстуры восстановленной трехмерной модели.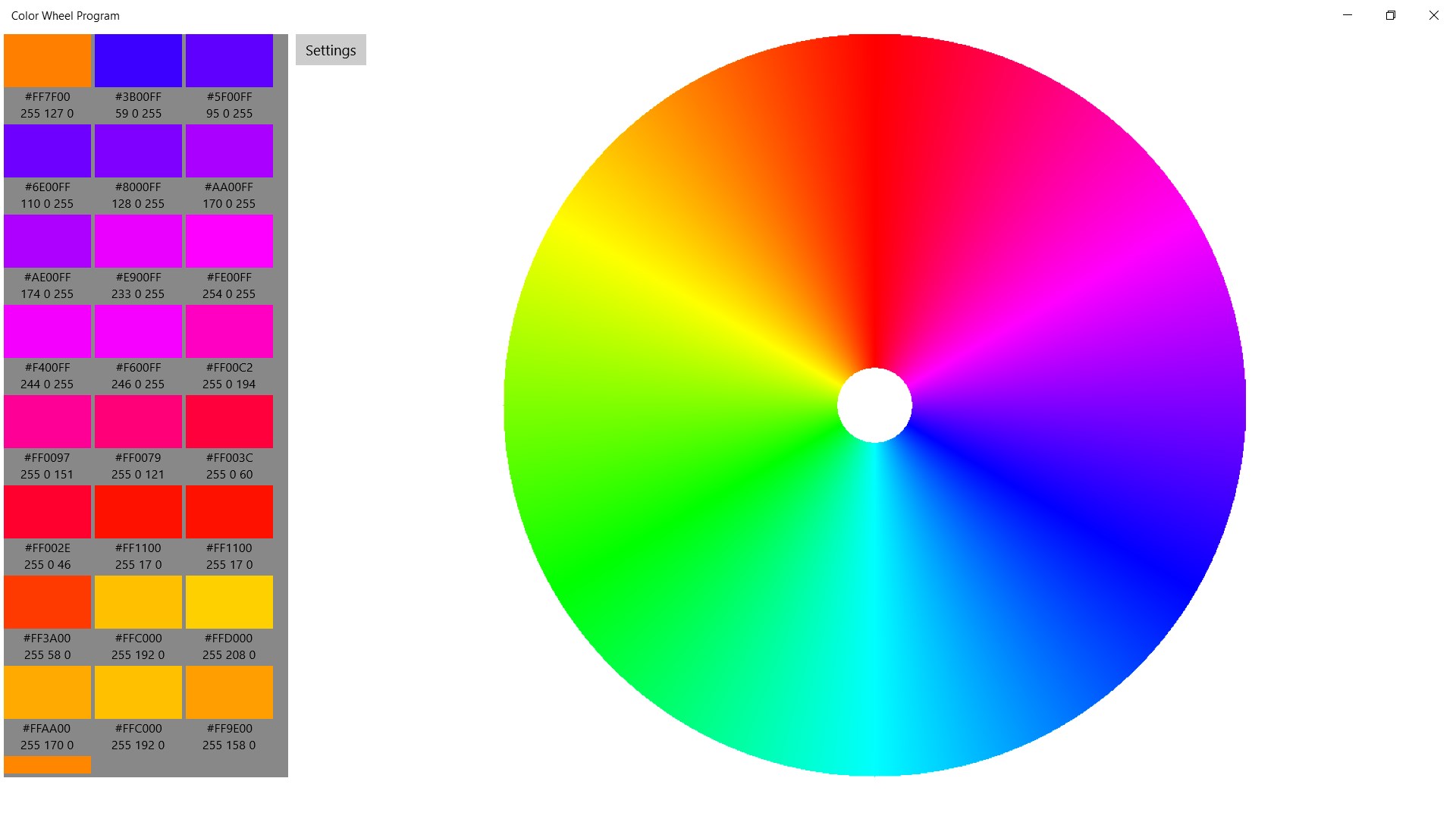
С другой стороны, нам нужно использовать несколько камер RGB-D для одновременного захвата трехмерной информации об объекте с разных точек обзора. Чтобы объединить 3D-точки, полученные разными камерами RGB-D, в опорной системе координат, необходимы внешние параметры между камерами RGB-D. Однако внешние параметры должны оцениваться пользователем, и оценка является непростой задачей без тщательно разработанных калибровочных объектов и алгоритмов.В этой статье мы предлагаем полностью автоматизированный метод оценки внешних параметров между различными камерами RGB-D.
Метод калибровки Чжана [8] с использованием плоской шахматной доски является наиболее популярным выбором для многих пользователей и исследователей из-за его реализации с автоматическим извлечением признаков [9]. Чтобы использовать метод внешней калибровки, соседние камеры должны находиться достаточно близко, чтобы одновременно видеть одни и те же элементы сцены.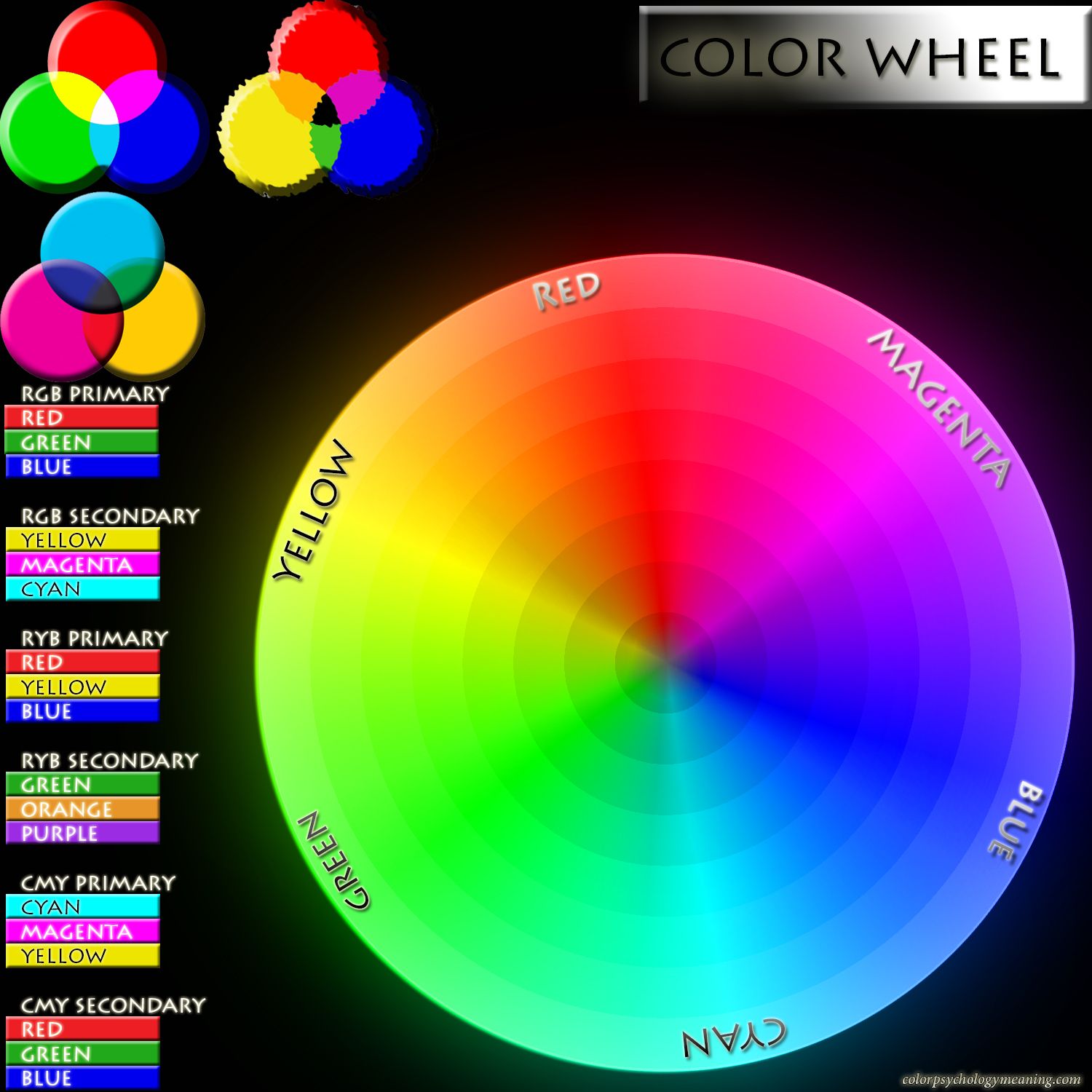
С экономической точки зрения лучше использовать как можно меньше камер RGB-D.При ограниченном количестве камер эффективно размещать камеры редко, чтобы они видели разные стороны объекта. В этом случае плоская шахматная доска не является подходящей целью для калибровки, потому что паре широко разнесенных камер трудно одновременно видеть одну и ту же сторону доски.
Подход самокалибровки [10] использует лазерный указатель для установления соответствия двухмерных точек на широко разделенных изображениях. Однако камеры RGB-D не могут точно измерить глубину небольшого объекта или глубину краев объекта [11].Поэтому, применяя подход к внешней калибровке камер RGB-D, мы должны предоставить дополнительную трехмерную информацию, такую как расстояние между двумя камерами или размер объекта.
Сферический объект [12,13,14,15,16,17,18,19,20,21] преодолевает ограничения планарной доски и лазерного указателя. Поскольку поверхность гладкая, измеренная глубина является точной, за исключением краев.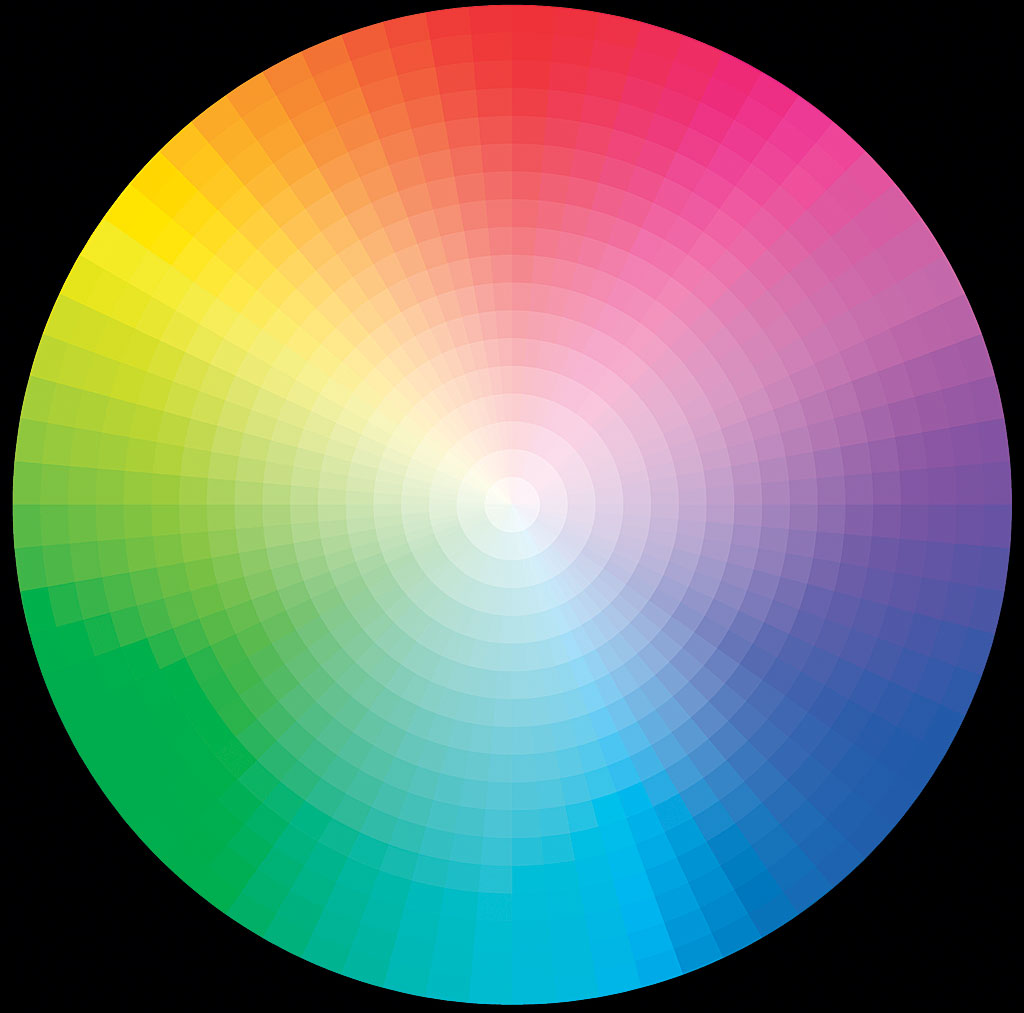 Кроме того, сферический объект виден одновременно с удаленных друг от друга точек обзора.Камеры обычно не видят одну и ту же сторону сферического объекта, но центры сфер, оцененные на основе измерений глубины поверхности, действуют как соответствия трехмерных точек между камерами.
Кроме того, сферический объект виден одновременно с удаленных друг от друга точек обзора.Камеры обычно не видят одну и ту же сторону сферического объекта, но центры сфер, оцененные на основе измерений глубины поверхности, действуют как соответствия трехмерных точек между камерами.
В предыдущих подходах сферические объекты обычно освещались [12,14] или окрашивались в уникальный цвет [13,15,16,17,18,19,20]. Обычно предполагается, что окружающая среда находится в условиях равномерного освещения и имеет другой цвет, чем сферический объект. В этом случае мы можем применить простой пороговый [12,14] или алгоритм вычитания фона [15,16,17,18,20], чтобы уменьшить области поиска сферического объекта.Мы также можем использовать цветовое распределение объекта для определения его проецируемых областей на цветных изображениях [15,20,21].
В студии или лаборатории можно управлять освещением или окружающей средой. Однако алгоритм вычитания фона может не сузить область поиска, если окружающая среда содержит объекты такого же цвета, что и сфера, или находится в условиях неоднородного освещения. Если цвет сферы не отличается от фона, методы, основанные на распределении цветов [15,20,21], также могут не сработать.
Если цвет сферы не отличается от фона, методы, основанные на распределении цветов [15,20,21], также могут не сработать.
Предполагая, что спроецированная форма сферического объекта круглая, мы предлагаем метод обнаружения круга, основанный на признаках области и краев. Форма спроецированной сферы обычно эллиптическая [22]. Если камера имеет незначительные радиальные искажения, наше предположение примерно верно. К счастью, цветные камеры, оснащенные камерами RGB-D, обычно имеют небольшие радиальные искажения. Кроме того, некоторые камеры RGB-D [6] обеспечивают выровненные и неискаженные пары цветных изображений и изображений глубины.
В нашем методе используется только одноцветное изображение и не используется вычитание фона.Кроме того, он не полагается на модели распределения цвета [15,20]. Kwon et al. [21] использовали входное изображение для моделирования распределения цвета фона, чтобы граница принятия решения между цветом объекта и другими цветами определялась автоматически. Однако этот метод уязвим к изменениям освещения, поэтому другие объекты обнаруживаются как сферы независимо от формы. Вместо модели распределения цветов наш метод основан на иерархической сегментации на основе цвета, которая делит заданный набор пикселей на два непересекающихся подмножества.Один цвет аналогичен среднему цвету сферического объекта, а другой отличается от среднего цвета. Затем круги обнаруживаются в обоих подмножествах на основе стоимости на основе региона и края. Чтобы найти больше кругов в меньших областях, исходный набор рекурсивно заменяется набором того же цвета. Следуя принятому в литературе соглашению [15,16,17,18,19,20], мы предполагаем, что на изображении существует одна сфера, и используем стоимость на основе нескольких сигналов, чтобы выбрать лучший круг. Поскольку предлагаемый метод по существу находит несколько кругов, его легко распространить на обнаружение нескольких сфер.
Однако этот метод уязвим к изменениям освещения, поэтому другие объекты обнаруживаются как сферы независимо от формы. Вместо модели распределения цветов наш метод основан на иерархической сегментации на основе цвета, которая делит заданный набор пикселей на два непересекающихся подмножества.Один цвет аналогичен среднему цвету сферического объекта, а другой отличается от среднего цвета. Затем круги обнаруживаются в обоих подмножествах на основе стоимости на основе региона и края. Чтобы найти больше кругов в меньших областях, исходный набор рекурсивно заменяется набором того же цвета. Следуя принятому в литературе соглашению [15,16,17,18,19,20], мы предполагаем, что на изображении существует одна сфера, и используем стоимость на основе нескольких сигналов, чтобы выбрать лучший круг. Поскольку предлагаемый метод по существу находит несколько кругов, его легко распространить на обнаружение нескольких сфер.
Обнаруженные круги не всегда могут быть точными, а центры подобранных сфер могут иметь большие ошибки.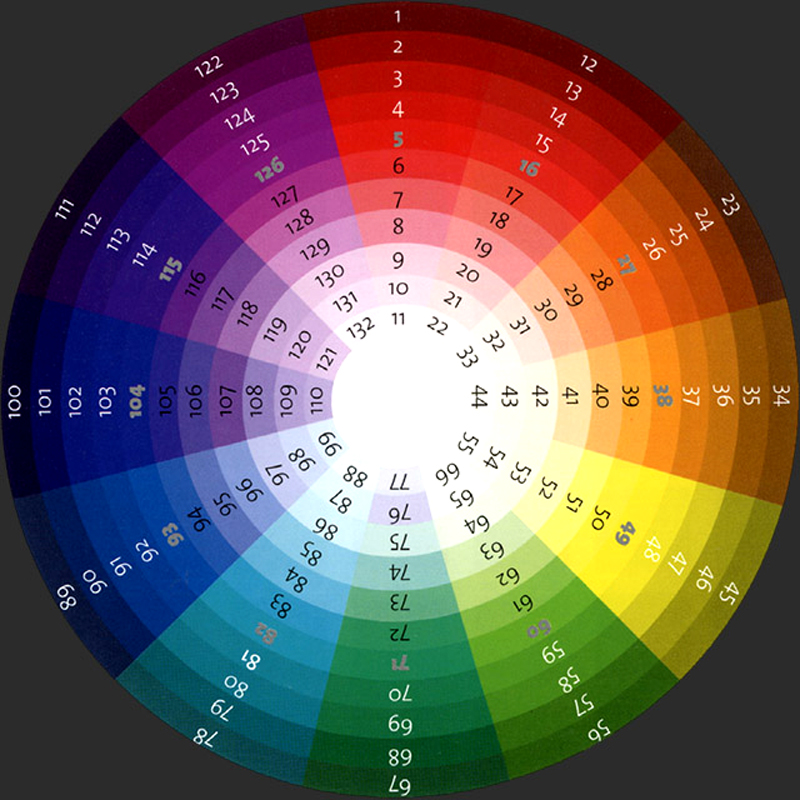 Чтобы справиться с ложным обнаружением и ошибками, мы используем робастные функции стоимости на каждом этапе предлагаемой процедуры внешней калибровки. Используя устойчивые функции затрат в системе случайной выборки на основе M-оценки [23], нам не нужно находить выбросы, но мы можем получить точные результаты. Мы демонстрируем эффективность нашего метода, сравнивая его с методом наименьших квадратов [20], который предполагает, что все обнаруженные центры сфер являются точными.
Чтобы справиться с ложным обнаружением и ошибками, мы используем робастные функции стоимости на каждом этапе предлагаемой процедуры внешней калибровки. Используя устойчивые функции затрат в системе случайной выборки на основе M-оценки [23], нам не нужно находить выбросы, но мы можем получить точные результаты. Мы демонстрируем эффективность нашего метода, сравнивая его с методом наименьших квадратов [20], который предполагает, что все обнаруженные центры сфер являются точными.
Остальная часть этого документа организована следующим образом. Раздел 2 рассматривает связанные работы. В разделе 3 представлены предлагаемые нами методы обнаружения круга и внешней калибровки нескольких камер RGB-D. В разделе 4 показаны экспериментальные результаты по точности обнаруженных центров окружностей и оцененных внешних параметров. Наконец, раздел 5 завершает статью.
2. Связанные работы
Камера глубины, оснащенная камерой RGB-D, обычно представляет собой камеру Time-of-Flight (ToF) [6] или 3D-камеру структурированного света (SL) [5,7].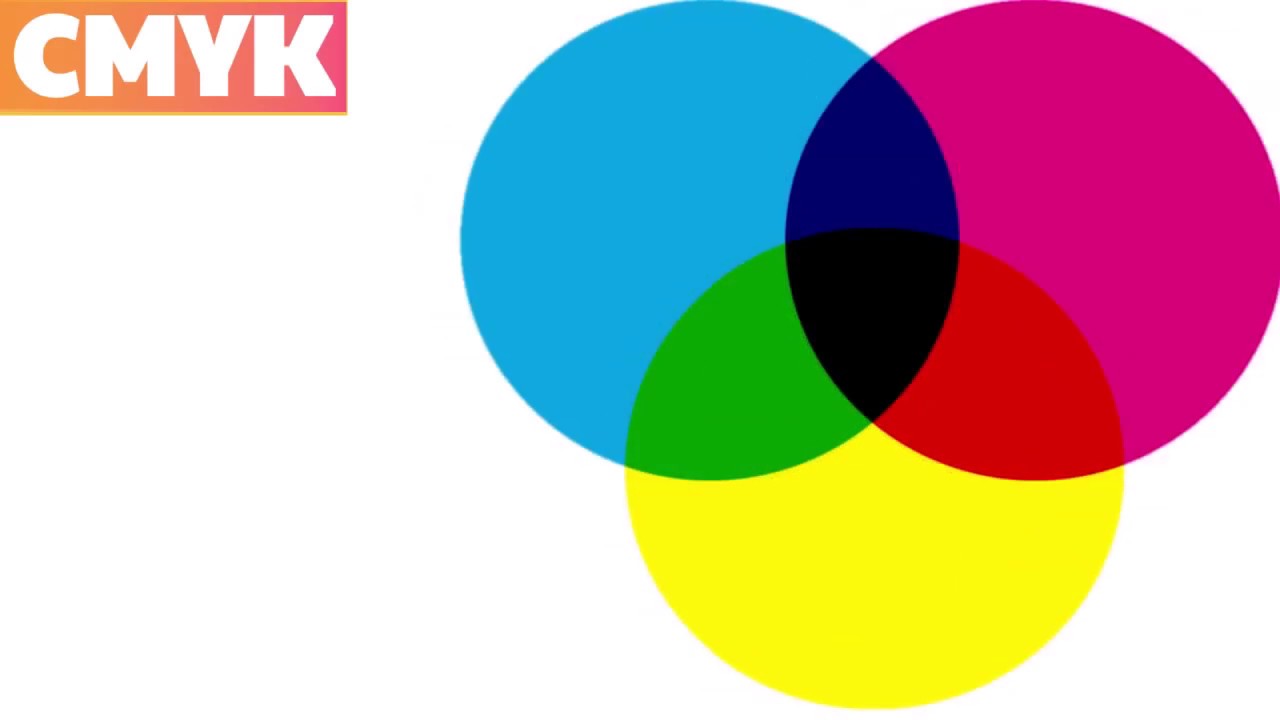 Обе камеры глубины освещают сцену инфракрасным (ИК) светом и получают отраженный свет с помощью ИК-камеры (или двумерного массива ИК-датчиков). Все камеры глубины страдают от нерегулярных шумов и систематических ошибок. Ранние исследовательские работы были сосредоточены на моделировании и уменьшении шума и ошибок [24,25,26,27].
Обе камеры глубины освещают сцену инфракрасным (ИК) светом и получают отраженный свет с помощью ИК-камеры (или двумерного массива ИК-датчиков). Все камеры глубины страдают от нерегулярных шумов и систематических ошибок. Ранние исследовательские работы были сосредоточены на моделировании и уменьшении шума и ошибок [24,25,26,27].
Многие исследователи разработали методы измерения систематической погрешности, существующей на глубинах, полученных с помощью 3D-камер ToF или SL [28,29,30,31]. Поскольку смещение зависит от различных факторов, таких как расположение пикселя, интенсивность ИК-излучения и измеренное расстояние, сложно смоделировать смещение без внешнего устройства измерения расстояния.Благодаря методу калибровки Чжана [8] цветная камера готова сыграть свою роль [28,29,30,31]. После калибровки цветной камеры с использованием плоской шахматной доски [8] можно оценить параметры плоскости шахматной доски на изображении. Предполагая, что внешние параметры заданы между цветной камерой и камерой глубины, можно преобразовать параметры плоскости в систему координат камеры глубины. Затем плоская глубина вычитается из измеренной глубины для вычисления попиксельных смещений.Основываясь на том факте, что внешняя калибровка и моделирование систематического смещения являются тесно связанными проблемами, Basso et al. [31] предложили схему оптимизации для одновременного решения обеих проблем.
Затем плоская глубина вычитается из измеренной глубины для вычисления попиксельных смещений.Основываясь на том факте, что внешняя калибровка и моделирование систематического смещения являются тесно связанными проблемами, Basso et al. [31] предложили схему оптимизации для одновременного решения обеих проблем.
Kim et al. [28] и Ян и др. [32] применили метод Чжана [8] к цветным и ИК-изображениям шахматной доски, чтобы цветная камера и камера глубины были откалиброваны внешне. Чтобы максимизировать видимость калибровочного объекта на ИК-изображениях, Jung et al. [30] предложили использовать специально разработанную доску с круглыми отверстиями.Для внешней калибровки камеры и лазерного дальномера Ха [33] предложил использовать шахматную доску с треугольным отверстием, что упрощает установление соответствия трехмерных точек между датчиками. Herrera et al. [29] предложил подход без ИК-изображения, основанный на ограничении планарности, согласно которому преобразованная плоскость должна совпадать с плоскостью глубинного изображения.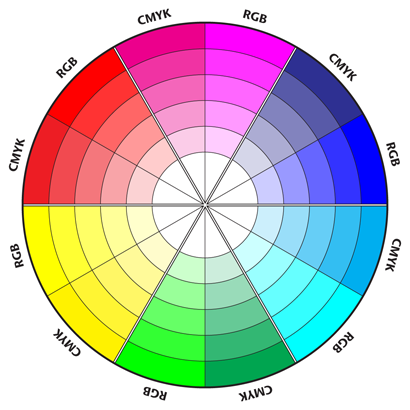 В этом методе используется узор в виде шахматной доски на большой плоской поверхности для установления соответствия трехмерных плоскостей между камерами. Fernández-Moral et al.[34] также предложили использовать соответствия трехмерных плоскостей для внешней калибровки набора камер глубины. Perez-Yus et al. [35] предложили использовать линейные соответствия для внешней калибровки пары камер цвета и глубины или системы из нескольких камер RGB-D. В их методе соответствия строк могут задаваться вручную или случайным образом. Perez-Yus et al. [35] представили экспериментальный результат, показывающий эффект случайно заданных соответствий. В этой статье основное внимание уделяется внешней калибровке между различными камерами RGB-D, предполагая, что отдельные камеры RGB-D были полностью откалиброваны.
В этом методе используется узор в виде шахматной доски на большой плоской поверхности для установления соответствия трехмерных плоскостей между камерами. Fernández-Moral et al.[34] также предложили использовать соответствия трехмерных плоскостей для внешней калибровки набора камер глубины. Perez-Yus et al. [35] предложили использовать линейные соответствия для внешней калибровки пары камер цвета и глубины или системы из нескольких камер RGB-D. В их методе соответствия строк могут задаваться вручную или случайным образом. Perez-Yus et al. [35] представили экспериментальный результат, показывающий эффект случайно заданных соответствий. В этой статье основное внимание уделяется внешней калибровке между различными камерами RGB-D, предполагая, что отдельные камеры RGB-D были полностью откалиброваны.
Для внешней калибровки различных камер глубины можно применить метод Чжана [8], метод Эрреры и др. [29] или метод Фернандеса-Морала и др. [34]. Если мы используем ИК-изображения шахматной доски [28,32], внешняя калибровка между камерами глубины такая же, как и для цветных камер [8]. В этом случае, поскольку пара ИК-изображений обеспечивает соответствия на одной плоскости, нам нужно получить несколько пар ИК-изображений, располагая шахматную доску по-разному. Без использования ИК-изображений внешние параметры между камерами глубины могут быть оценены путем получения изображений глубины как минимум трех различных положений плоской доски [29,34].Однако одна и та же сторона шахматной или плоской доски практически не просматривается одновременно широко разнесенными камерами RGB-D. Следовательно, камеры должны быть расположены плотно, чтобы соседние камеры имели большое общее поле зрения.
В этом случае, поскольку пара ИК-изображений обеспечивает соответствия на одной плоскости, нам нужно получить несколько пар ИК-изображений, располагая шахматную доску по-разному. Без использования ИК-изображений внешние параметры между камерами глубины могут быть оценены путем получения изображений глубины как минимум трех различных положений плоской доски [29,34].Однако одна и та же сторона шахматной или плоской доски практически не просматривается одновременно широко разнесенными камерами RGB-D. Следовательно, камеры должны быть расположены плотно, чтобы соседние камеры имели большое общее поле зрения.
Сферы использовались для калибровки цветных камер, а также камер RGB-D [12,13,14,15,16,17,18,19,20,21]. Agrawal et al. [12] и Zhang et al. [13] предложили методы как внутренней, так и внешней калибровки цветных камер. В методах используются три или более изображения сферы в разных местах.Для внешней калибровки методы оценивают трехмерные положения сферических центров по проекциям перекрывающих контуров сферы. Затем трехмерные позиции используются для регистрации трехмерных точек между двумя камерами. Из-за отсутствия прямых трехмерных измерений на сфере на точность методов сильно влияет подгонка проекций сфер к эллипсу. Для надежной внешней калибровки с точностью до ошибки аппроксимации эллипса Гуан и др. [14] использовал метод Чжана [8] для восстановления внутренних параметров, предполагая, что центры сферы проецируются на центроиды проекций сферы.Затем значения глубины центров сфер были оценены с использованием площади выступов.
Затем трехмерные позиции используются для регистрации трехмерных точек между двумя камерами. Из-за отсутствия прямых трехмерных измерений на сфере на точность методов сильно влияет подгонка проекций сфер к эллипсу. Для надежной внешней калибровки с точностью до ошибки аппроксимации эллипса Гуан и др. [14] использовал метод Чжана [8] для восстановления внутренних параметров, предполагая, что центры сферы проецируются на центроиды проекций сферы.Затем значения глубины центров сфер были оценены с использованием площади выступов.
Насколько нам известно, Shen et al. [15] впервые использовали сферу в качестве калибровочного объекта для сети камер RGB-D с широкой базой. Они предложили методы калибровки RGB и глубины и калибровки глубины и глубины. Позже Су и др. [20] расширили свою прежнюю работу [15], чтобы использовать нежесткие внешние параметры для уменьшения ошибок в объединенном облаке точек. Руан и Хубер [16] предложили метод оптимизации для оценки внешних параметров и одновременной коррекции центров сфер.![]() Старанович и др. [17] показали, что камеру RGB-D можно как внутренне, так и внешне откалибровать с помощью сферы. Позже они расширили свою работу до внешней калибровки нескольких камер RGB-D [18].
Старанович и др. [17] показали, что камеру RGB-D можно как внутренне, так и внешне откалибровать с помощью сферы. Позже они расширили свою работу до внешней калибровки нескольких камер RGB-D [18].
Чтобы упростить обнаружение сферических объектов на цветных изображениях, в предыдущих подходах использовалась освещенная сфера [12,14] или сфера, окрашенная в уникальный цвет [13,15,16,17,18,19,20]. Подходы применяют простой пороговый [12,14] или алгоритм вычитания фона [15,16,17,18,20], чтобы уменьшить области поиска сферического объекта.Шен и др. [15] и Су и др. [20] использовали вероятностную модель на основе цвета для обнаружения проекций сферы. Старанович и др. [17,18] использовали круговое преобразование Хафа [36], чтобы найти круглые формы в сегментированных областях переднего плана. В контролируемых условиях освещения вычитание фона и определение цвета дадут точные результаты. Однако в неконтролируемых средах освещение может быть неоднородным, и построить модель фона может быть сложно.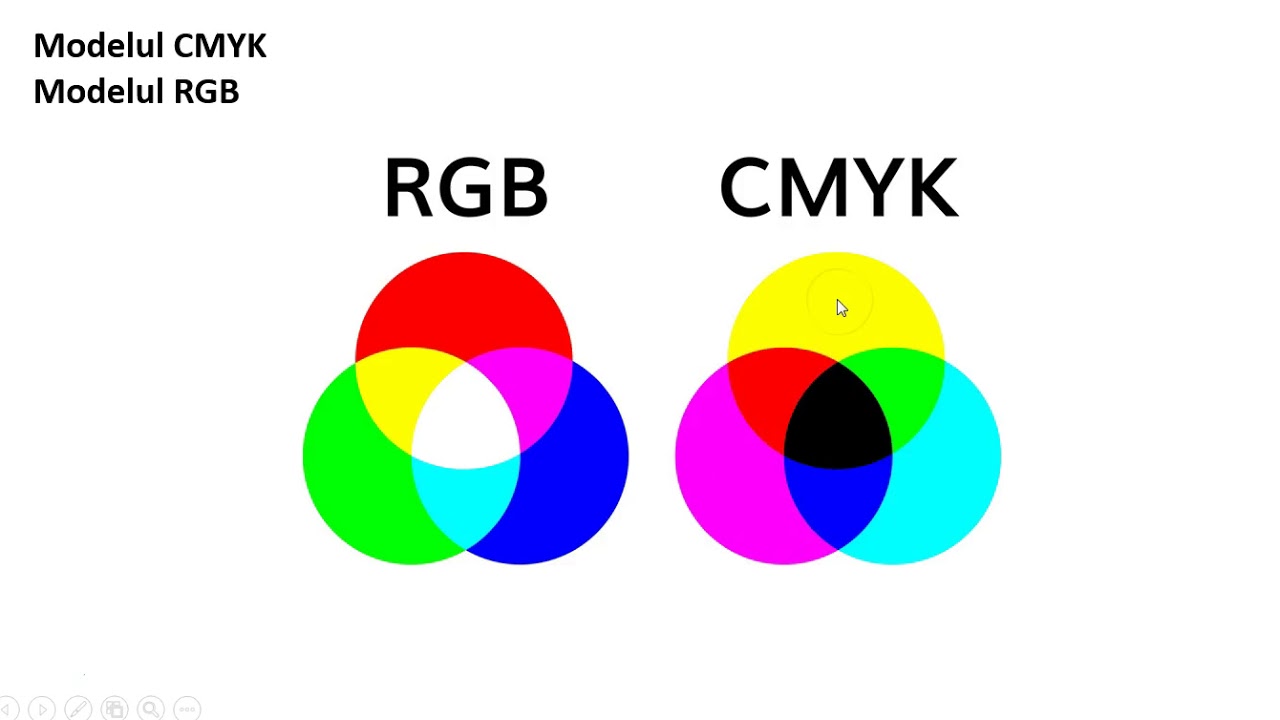 Кроме того, фон может содержать объекты, близкие по цвету к сфере.В нашей предыдущей работе [21] экспериментальные результаты показали, что вероятностная модель на основе цвета часто не работает при различных условиях освещения.
Кроме того, фон может содержать объекты, близкие по цвету к сфере.В нашей предыдущей работе [21] экспериментальные результаты показали, что вероятностная модель на основе цвета часто не работает при различных условиях освещения.
Расчетные центры сфер могут быть неточными по нескольким причинам. Например, камеры RGB-D могут быть асинхронными [19], а алгоритмы обнаружения сфер [15,16,17,18,20] могут обнаруживать неправильные объекты. Шен и др. [15] и Су и др. [20] синхронизировали свою систему захвата, используя протокол сетевого времени. Ли и др. В [19] предложен алгоритм компенсации ошибки синхронизации в предполагаемых центрах сфер.Некоторые методы [15,16,20] не предполагают ложного обнаружения, в то время как другие методы [18,19] применяют RANSAC [22,37] для исключения выбросов при попарной оценке положения камеры.
Для одновременного захвата нескольких пар цветных и глубинных изображений мы подключили все камеры RGB-D к одному компьютеру и использовали несколько потоков для одновременного вызова функций захвата. Однако это не гарантирует идеальной синхронизации. Наша основанная на оптимизации структура основана на надежных функциях потерь и обеспечивает точные результаты калибровки без явного обнаружения или отклонения выбросов.При большом количестве изображений предложенный метод позволяет повысить точность калибровки при неполной синхронизации.
Однако это не гарантирует идеальной синхронизации. Наша основанная на оптимизации структура основана на надежных функциях потерь и обеспечивает точные результаты калибровки без явного обнаружения или отклонения выбросов.При большом количестве изображений предложенный метод позволяет повысить точность калибровки при неполной синхронизации.
3. Предлагаемый метод
Учитывая M RGB-D камер и N пар цветных и глубинных изображений на камеру, наш алгоритм обнаружения круга находит сферические области в цветных изображениях M × N. Затем центры сфер оцениваются в соответствующих областях изображений глубины. Центры сфер M × N используются в качестве трехмерных соответствий точек на камерах глубины.Попарные позы между разными камерами глубины оцениваются с помощью соответствий. Трехмерные положения центров, а также позы уточняются с помощью настройки связки [38]. резюмирует предлагаемый метод.
Предлагаемый метод внешней калибровки нескольких камер RGB-D. Зеленые кружки представляют обнаруженные области сферы. Обратитесь к тексту для более подробной информации.
Зеленые кружки представляют обнаруженные области сферы. Обратитесь к тексту для более подробной информации.
3.1. Робастная оценка
Предлагаемый нами метод в значительной степени опирается на робастные функции потерь, которые ограничивают величину ошибки e фиксированным значением τ.На каждом этапе нашего метода e определяется по-разному. Например, e может быть расстоянием между пикселями, между трехмерными точками или между длинами, с физическими единицами измерения в пикселях или сантиметрах. Если мы используем абсолютные ошибки, робастная функция потерь ρτ (| e |) определяется как:
ρτ (| e |) = | e | if | e | <τ, в противном случае τ,
(1)
где τ — значение ограничения ошибки, связанное с ρ, а единица τ также зависит от ее применения. суммирует значения и единицы измерения τ, используемые в этой статье.Аналогично, если мы используем квадратные ошибки, ρτ2 (e2) определяется как:
ρτ2 (e2) = e2, если e2 <τ2, в противном случае τ2.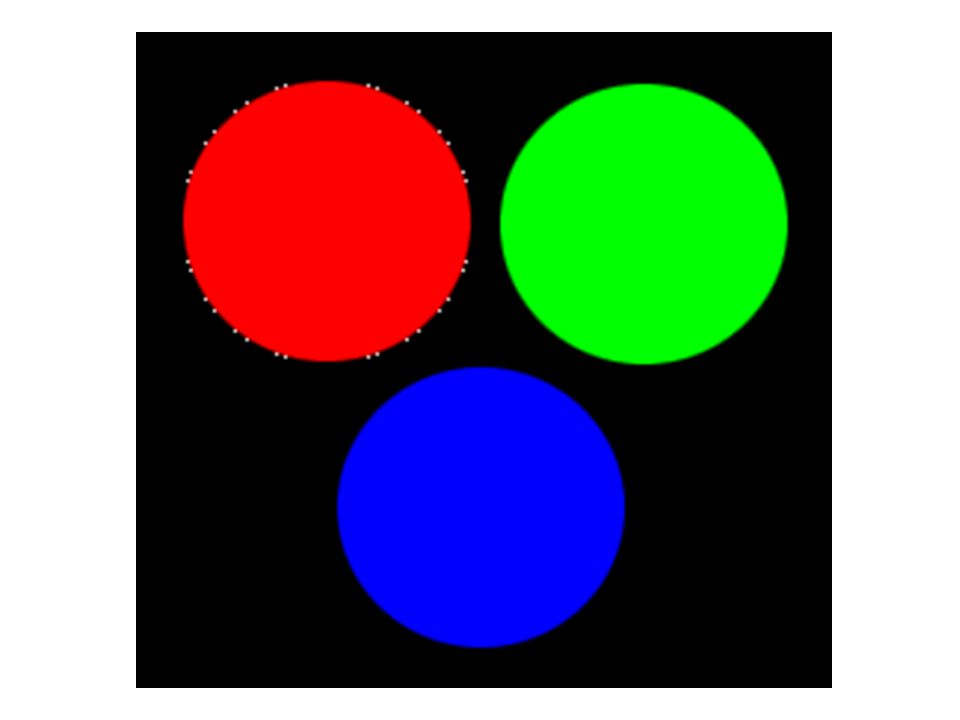
(2)
Таблица 1
Сводка параметров, используемых в этой статье. Средний цвет сферы был вычислен из изображений OpenCV CIE-La * b *. a * и b * находятся в диапазоне 0–255. MSAC, выборочный консенсус M-эстиматора.
| Параметр | Этап или значение | Настройка в этом документе | Рекомендуемые настройки |
|---|---|---|---|
| τ (или τ2) | Значение отсечения ошибки (порог) робастной функции потерь ρ | ||
| τCF | Окружность | 3 пикселя | 2–4 пикселя |
| τMC | Обнаружение круга | мин (τCF, 0.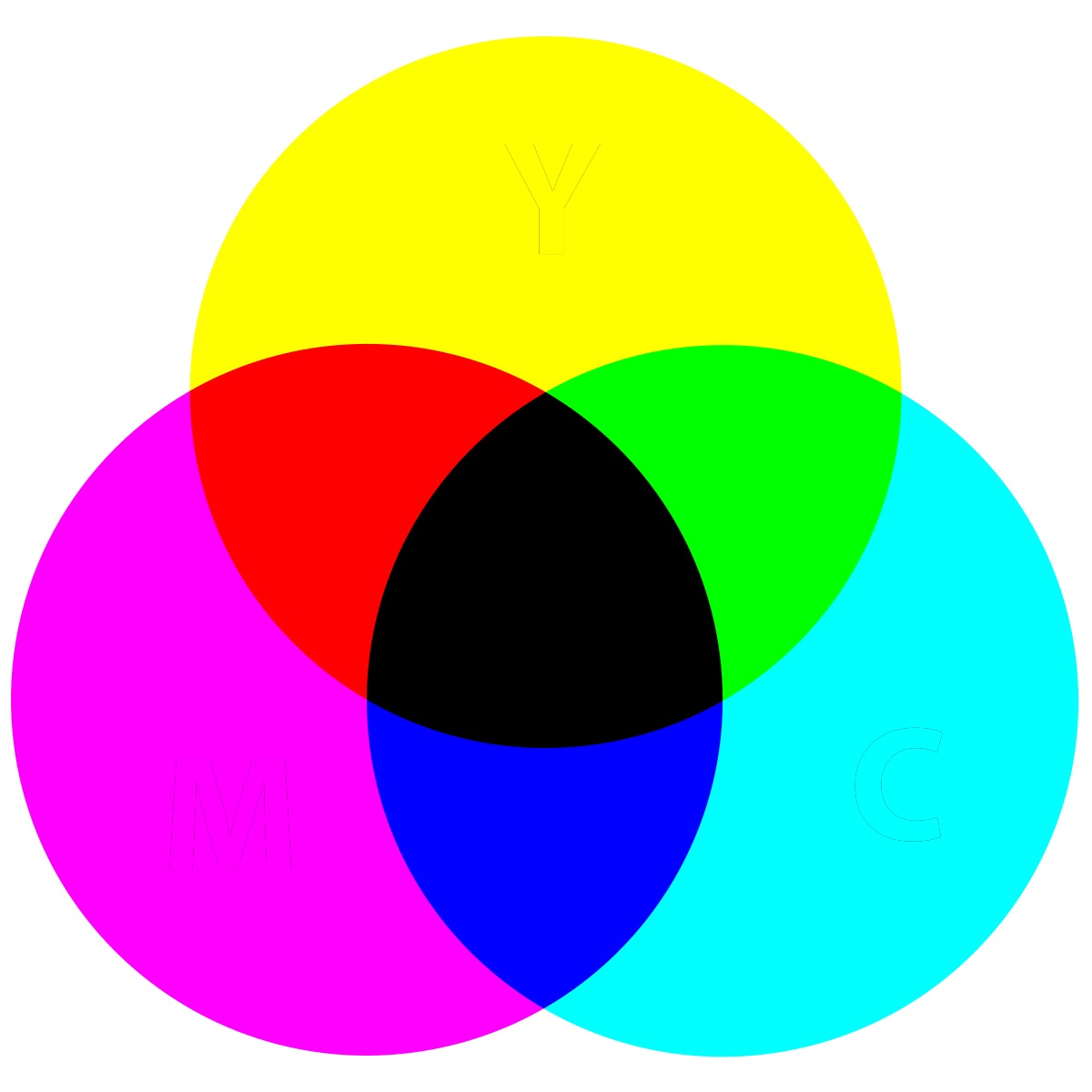 1 × радиус окружности) 1 × радиус окружности) | Адаптивный |
| τSF | Шаровой фитинг | 2 см | 1–5 см |
| τRT | Оценка парной позы | 23 см | 3τBA |
| τBA | Регулировка связки | 2 см | 1–5 см |
| NS | Общее количество выборок в MSAC | ||
| NS | Круглый фитинг | 1000 | 1000 |
| NS | Сферический фитинг | 10,000 | 10,000 |
| NS | Оценка парной позы | 10,000 | 10,000 |
| am = (am *, bm *) | Средний цвет сферы | (165. 79, 146.02) 79, 146.02) | Выучено |
| К | Иерархическая сегментация | 30 | 30 |
| dmin | Обнаружение круга | 10 | 5–15 (малое значение) |
| Pmin | Обнаружение круга | 10% | Зависит от цели |
| rmin | Обнаружение круга | 10 пикселей | 10 пикселей |
| rmax | Обнаружение круга |
0. 5 · мин (ширина изображения, высота изображения) 5 · мин (ширина изображения, высота изображения) | Адаптивный |
При устойчивой оценке функция стоимости обычно определяется как сумма устойчивых функций потерь. Поскольку надежные функции потерь ограничивают величину ошибки, они уменьшают влияние выбросов на стоимость.
Мы также часто использовали структуру выборочного консенсуса M-эстиматора (MSAC) [23], которая обеспечивает систематический способ использования робастной функции потерь для оценки параметров модели. MSAC итеративно выбирает случайные выборки из минимального количества элементов, необходимых для вычисления параметра модели p.В нашем методе модель варьируется от круга до жесткого преобразования между камерами. Элементами обычно являются точки или пары точек, и их тип, а также их минимальное количество зависят от модели. Например, если модель представляет собой круг, вектор параметров p состоит из центра и радиуса круга, и нам нужны как минимум три точки для вычисления p.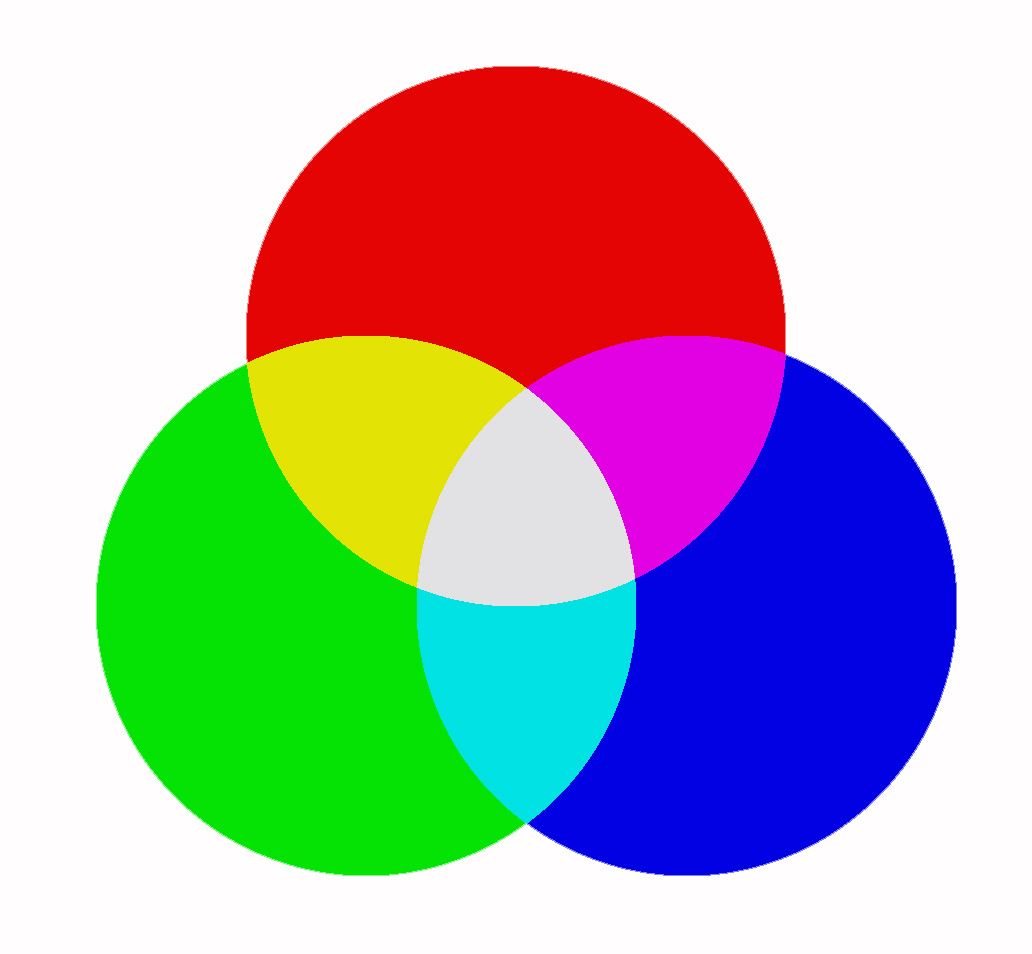
В MSAC для каждого p вычисляется надежная функция стоимости J (p), чтобы найти наилучшее p ★, минимизирующее J (p). Например, J (p) можно определить как:
где ei — ошибка, вычисленная по элементу i .
Процедура MSAC, используемая в этой статье, кратко описана в алгоритме 1. В алгоритме 1 NS — это общее количество выборок, и более подробное обсуждение установки NS будет дано в разделе 3.6. J (p) можно дополнительно минимизировать, применяя алгоритмы нелинейной оптимизации, такие как алгоритм Левенберга – Марквардта [39,40]; однако мы пропускаем этот шаг, если не указано иное.
| Алгоритм 1: Общая процедура MSAC. |
| Результат : p ★ минимизация J (p) Jmin = максимальное значение типа данных J (p); p ★ = произвольное значение или вектор; |
3.
 2. Обнаружение круга на основе нескольких сигналов
2. Обнаружение круга на основе нескольких сигналов Поскольку мы предполагаем, что освещение может различаться на разных изображениях, мы представляем цвет в пространстве, которое меньше зависит от изменений освещения. Для этого мы преобразуем значения RGB в пространство CIE-La * b *, чтобы использовать только компоненты a * и b *, на которые меньше влияют изменения освещения за счет уменьшения различимости.
Считаем сферический объект монохроматическим. Обозначим средний цвет сферического объекта как am = (am *, bm *), который может быть вычислен из обучающего набора, снятого в разных местах при разных условиях освещения [21].Учитывая цветное изображение, мы можем найти пиксель с цветным объявлением (1), который наиболее удален от am. Затем пиксели изображения делятся на два непересекающихся набора Sd (1) и Sm (1) в соответствии с их цветовыми расстояниями от am и ad (1). Если цвет пикселя ближе к am, он принадлежит Sm (1), в противном случае — Sd (1). Таким образом, мы можем рекурсивно разделить Sm (k-1) на два непересекающихся множества Sm (k) и Sd (k), найдя ad (k) в Sm (k-1) с максимальным значением ∥ad (k) -am∥.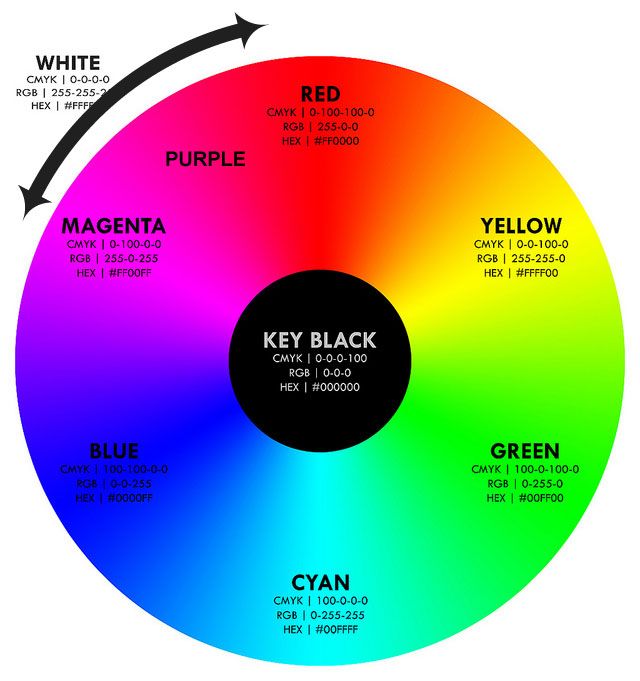
иллюстрирует процедуру кластеризации пикселей на основе цвета.Как показано на рисунке, пиксели около среднего цвета рекурсивно отделяются от более удаленных пикселей. Рекурсивная процедура позволяет нам иметь хорошие шансы обнаружить область сферы, как показано на.
Кластеризация пикселей на основе цвета. Черные кружки представляют цвета пикселей. Цвет, наиболее удаленный от am, — это ad (1), а пиксели разделены на два непересекающихся множества Sd (1) и Sm (1), которые представляют собой объединение Sm (3), Sd (3) и Sd (2 ). Черные пунктирные линии представляют границу между различными наборами пикселей.Обратитесь к тексту для более подробной информации. Лучше всего смотреться в цвете.
Пример кластеризации пикселей на основе цвета. ( a ) Входное цветное изображение. ( b ) Sm (1) и Sd (1) имеют разную цветовую кодировку. Sm (1) и Sd (1) окрашены в красный и синий цвета соответственно. ( c ) Sm (2), Sd (1) и Sd (2) окрашены в красный, синий и зеленый цвета соответственно.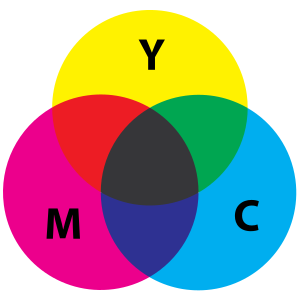 ( d ) Sm (3), Sd (1) и Sd (2), Sd (3) окрашены в красный, синий, зеленый и желтый цвета соответственно. ( e ) Sm (4), Sd (1), Sd (2), Sd (3) и Sd (4) окрашены в красный, синий, зеленый, желтый и голубой цвета соответственно.
( d ) Sm (3), Sd (1) и Sd (2), Sd (3) окрашены в красный, синий, зеленый и желтый цвета соответственно. ( e ) Sm (4), Sd (1), Sd (2), Sd (3) и Sd (4) окрашены в красный, синий, зеленый, желтый и голубой цвета соответственно.
Однако из-за различных условий освещения нет гарантии, что проецируемая область сферического объекта всегда будет состоять из пикселей в Sm (k). Следовательно, мы обнаруживаем все связанные области [41] в Sm (k) и Sd (k) для всех k = 1,…, K, где K = 30, на протяжении всей этой статьи. Между тем, если ∥ad (k) -am∥ меньше dmin (в этой статье 10), мы останавливаем процедуру кластеризации пикселей. показывает примеры связанных областей, рекурсивно обнаруженных в Sm (k) и Sd (k).
Краевые пиксели и связанные компоненты.( a ) Изображение края a. ( b ) Связанные области, обнаруженные в Sm (1) и Sd (1), имеют разную цветовую кодировку. ( c ) Связанные области обнаружены в Sm (2) и Sd (2). ( d ) Связанные области обнаружены в Sm (3) и Sd (3). ( e ) Связанные области обнаружены в Sm (4) и Sd (4).
( d ) Связанные области обнаружены в Sm (3) и Sd (3). ( e ) Связанные области обнаружены в Sm (4) и Sd (4).
Мы предполагаем, что по крайней мере одна из связанных областей является, по крайней мере, частично проекцией сферического объекта и что форма области является круглой. Чтобы соединенная область была круглой, граничные пиксели области должны находиться рядом с окружностью.Если рядом с круговыми граничными пикселями есть краевые пиксели [42], краевые пиксели являются убедительным доказательством существования круга. Поэтому мы используем как граничные пиксели, так и краевые пиксели для обнаружения круглых областей.
Чтобы оценить центр c = (cx, cy) и радиус r связной области, мы используем MSAC [23]. Учитывая расположение граничных пикселей xi = (xi, yi) для i = 1, …, NCF, мы находим c и r , минимизирующие следующую функцию стоимости.
JCF (c, r) = ∑i = 1NCFρτCF (| ∥xi-c∥-r |),
(4)
где τCF = 3 пикселя на протяжении всей статьи.
Учитывая три разных граничных пикселя, легко вычислить пару c и r . Без ограничения общности обозначим такие три местоположения пикселей как x1 = (x1, y1), x2 = (x2, y2) и x3 = (x3, y3). Чтобы три пикселя находились на окружности, должно выполняться следующее линейное уравнение:
(xi-x1) · cx + (yi-y1) · cy = 0,5 · (xi2-x12 + yi2-y12)
(5)
для i = 2,3. c достигается решением линейных уравнений. Учитывая c, просто вычислить r , что определяется по формуле:
для любого i∈ {1,2,3}.
Мы случайным образом рисуем образцы из трех граничных пикселей NS раз, чтобы вычислить NS различных пар c и r , где NS = 1000. Затем пара, минимизирующая уравнение (4), выбирается в качестве решения.
Ради эффективности круги подгоняются только к соединенным областям, так что по крайней мере Pmin% (в этой статье 10%) их пикселей взяты из Sm (1). Кроме того, мы отклоняем связанные области, которые слишком велики или слишком малы в зависимости от количества пикселей в регионах. Чтобы окружность соответствовала соединенной области, количество пикселей должно быть больше πrmin2 и меньше πrmax2, где rmin установлено на 10 пикселей, а rmax — половина ширины или высоты изображения.Если такой связной области нет, то предложенным методом круг не обнаруживается.
Чтобы окружность соответствовала соединенной области, количество пикселей должно быть больше πrmin2 и меньше πrmax2, где rmin установлено на 10 пикселей, а rmax — половина ширины или высоты изображения.Если такой связной области нет, то предложенным методом круг не обнаруживается.
Для всех подобранных кругов мы вычисляем следующую стоимость JMC на основе нескольких сигналов (c, r).
JMC (c, r) = 1τMC∑θ = 0∘359∘minrB (ρτMC (| rB-r |) + ρτMC (dE (θ, rB))),
(7)
где θ — квантованный угол в диапазоне от 0∘ до 359∘ с разрешением 1∘, а rB увеличивается от r-τMC – r + τMC, чтобы найти граничный пиксель в пределах одного пикселя из (rBcosθ + cx, rBsinθ + cy) . Здесь для τMC установлено меньшее значение между τCF и 0.1r, чтобы предотвратить обнаружение небольших несуществующих кругов. dE (θ, rB) — это расстояние от граничного пикселя до его ближайшего граничного пикселя. Граничный пиксель не всегда уникален для пары θ и rB; вот почему мы вычисляем минимальное значение в уравнении (7).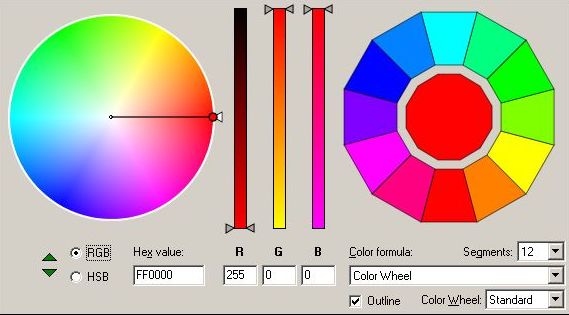 Для некоторых θ граничный пиксель может отсутствовать в диапазоне rB. В этом случае мы полагаем ρτMC (| rB-r |) + ρτMC (dE (θ, rB)) равным 2τMC. иллюстрирует пример граничного пикселя для пары θ и rB. Как показано на рисунке, как граничные пиксели, так и краевые пиксели имеют тенденцию быть ближе к окружности, если область круглая.Предлагаемый алгоритм обнаружения круга кратко описан в алгоритме 2.
Для некоторых θ граничный пиксель может отсутствовать в диапазоне rB. В этом случае мы полагаем ρτMC (| rB-r |) + ρτMC (dE (θ, rB)) равным 2τMC. иллюстрирует пример граничного пикселя для пары θ и rB. Как показано на рисунке, как граничные пиксели, так и краевые пиксели имеют тенденцию быть ближе к окружности, если область круглая.Предлагаемый алгоритм обнаружения круга кратко описан в алгоритме 2.
Обнаружение круга на основе нескольких сигналов. Краевые пиксели в a нарисованы черным цветом в связанных областях в d. Синие пунктирные кружки представляют диапазон поиска от r-τMC – r + τMC для пикселей границы области. Обратитесь к тексту для более подробной информации.
| Алгоритм 2: Предлагаемый алгоритм обнаружения круга. |
| Результат : (c ★, r ★) минимизация JMC (c, r) i = 1; Sm (0) = набор всех пикселей входного изображения; Сортировка {JMC (cj, rj)} j = 1i-1 в порядке возрастания; (c ★, r ★) = (c1, r1) с наименьшим JMC (c, r) в отсортированном множестве.  |
3.3. Сферический фитинг
Учитывая круговую область на цветном изображении, можно считывать трехмерные точечные измерения Xi = (Xi, Yi, Zi) для i = 1,…, NSF в соответствующей области изображения глубины, потому что мы предполагаем что наши отдельные камеры RGB-D были полностью откалиброваны. Учитывая трехмерные точки, процедура MSAC [23] применяется для оценки центра сферы C = (CX, CY, CZ). Минимизируем:
JSF (C, R) = ∑i = 1NSFρτSF (| ∥Xi-C∥-R |),
(8)
где τSF установлено равным 2 см.
Учитывая четыре трехмерные точки на сфере, например X1, X2, X3 и X4, без ограничения общности, мы можем вычислить C, решив следующее линейное уравнение:
(Xi-X1) · CX + (Yi-Y1 ) · CY + (Zi-Z1) · CZ = 0,5 · (Xi2-X12 + Yi2-Y12 + Zi2-Z12)
(9)
для i = 2,3,4. Учитывая C, просто вычислить R , что определяется как:
R = (Xi-CX) 2+ (Yi-CY) 2+ (Zi-CZ) 2
(10)
для любого i∈ {1,2,3,4}. Мы устанавливаем количество случайных выборок NS равным 10 000, чтобы увеличить вероятность рисования хотя бы одной выборки из четырех точных трехмерных точек в процедуре MSAC.
3.4. Попарная оценка позы
Теперь у нас есть центры сфер Ci (q) для q = 1,…, M и i = 1,…, N. Обозначим видимость Ci (q) как vi (q), которая равна единице, если Ci (q) видна (или была обнаружена нашим алгоритмом), и в противном случае равна нулю.
Без ограничения общности предположим, что эталонная камера глубины является первой. Для каждой пары камер глубины 1 и q мы применяем MSAC [23] для вычисления жесткого преобразования от камеры глубины 1 к камере глубины q , так что:
где Rq — матрица вращения 3 × 3, а Tq — вектор трехмерного переноса жесткого преобразования.
Учитывая четыре кадра изображения (или четыре видимые пары центров сфер), мы можем вычислить жесткое преобразование. Более подробную информацию о вычислениях см. В [22]. Мы случайным образом выбираем четыре кадра изображения итеративно, чтобы найти минимизирующее жесткое преобразование:
JRT (Rq, Tq) = ∑i = 1Nvi (q) · vi (1) · ρτRT2 (∥Ci (q) -RqCi (1) -Tq ∥2).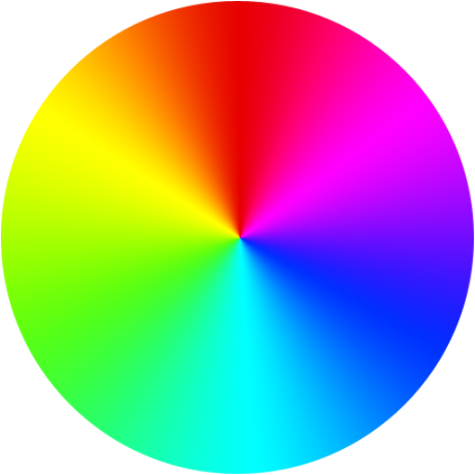
Алгоритм Левенберга – Марквардта [39,40] может минимизировать сумму квадратов. Предлагаемый метод использует надежную функцию потерь, но JBA по-прежнему является суммой квадратов усеченных разностей. Поэтому мы используем алгоритм Левенберга – Марквардта [39,40], чтобы минимизировать затраты. Алгоритм 3 резюмирует предлагаемый метод внешней калибровки.
| Алгоритм 3: Предлагаемый алгоритм внешней калибровки. |
| Результат : {Rq ★, Tq ★} q = 2M, {Ci ★} i = 1N минимизация JBA ({Rq, Tq} q = 2M, {Ci} i = 1N) Примените Levenberg –Алгоритм Марквардта для поиска {Rq ★, Tq ★} q = 2M, {Ci ★} i = 1N, минимизирующий JBA ({Rq, Tq} q = 2M, {Ci} i = 1N), с {R¯q, T¯q} q = 2M, {C¯i} i = 1N в качестве начального решения; |
3.
 6. Обсуждение настроек параметров
6. Обсуждение настроек параметров Предлагаемый метод зависит от более чем десяти параметров, которые суммированы в. Предлагаемый метод использует робастную функцию потерь ρ на каждом этапе, и связанное с ним значение ограничения τ изменяется в зависимости от приложения.Например, при подгонке круга τ обозначается τCF, а его единица измерения — пиксели. Мы также используем ρ с τMC для вычисления стоимости JMC на основе нескольких сигналов для каждого подобранного круга. Значения τSF, τRT и τBA зависят от глубинного шума, величина которого для камер Kinect v2 составляет около 1 см [43]. Мы рекомендуем пользователям попробовать несколько целых кратных величин шума, чтобы установить значения τSF и τBA. После установки τBA разумно установить τRT равным 3τBA, учитывая формы функций стоимости JRT и JBA.
NS — общее количество выборок в MSAC, которое также зависит от приложения. NS зависит от пропорции w вставок и минимального количества s элементов для генерации гипотезы [22]:
NS = log (0,01) log (1-ws).
(14)
Используя NS в уравнении (14), можно вычислить допустимое решение с вероятностью 99%. Чтобы увеличить вероятность, мы можем уменьшить 0,01 до меньшего значения. При подгонке круга нам нужно как минимум три граничных пикселя (s = 3) для вычисления центра и радиуса круга.Нам нужно как минимум четыре точки трехмерной поверхности (s = 4), чтобы вычислить центр и радиус сферы. При попарной оценке позы нам также нужно по крайней мере четыре пары сфера-центр (s = 4), чтобы вычислить вращение и перемещение между камерами. Согласно Хартли и Зиссерману [22], значения могут быть установлены на число около 100, когда w составляет около 0,5. На практике, однако, трудно узнать и , поэтому мы устанавливаем NS равным 1000 или 10 000, чтобы избежать сбоя при наличии лишь небольшого количества вставок.
Средний цвет am сферы является наиболее важным параметром, который необходимо изучить, если сферический объект окрашен по-другому.Средний цвет сферы был вычислен из 30 обучающих изображений в наборе данных Квона и др. [21]. Pmin контролирует гибкость предлагаемого метода: если Pmin высокое, метод обнаружения кругов имеет тенденцию обнаруживать круги, цвет которых отличается от am. Мы устанавливаем Pmin на низкое значение (10%), чтобы максимизировать устойчивость к изменениям освещения. Хотя в следующем разделе мы используем различные сферические объекты, мы не настраиваем параметры предлагаемого метода для проверки его устойчивости к изменениям в объектах.В этой статье мы используем одни и те же параметры.
[21]. Pmin контролирует гибкость предлагаемого метода: если Pmin высокое, метод обнаружения кругов имеет тенденцию обнаруживать круги, цвет которых отличается от am. Мы устанавливаем Pmin на низкое значение (10%), чтобы максимизировать устойчивость к изменениям освещения. Хотя в следующем разделе мы используем различные сферические объекты, мы не настраиваем параметры предлагаемого метода для проверки его устойчивости к изменениям в объектах.В этой статье мы используем одни и те же параметры.
4. Эксперименты
В этом разделе мы приводим экспериментальные результаты по точности и надежности предлагаемого метода. В первом подразделе показаны экспериментальные результаты предлагаемого метода обнаружения круга на наборах данных с загроможденным фоном и различными условиями освещения. Во втором подразделе показаны экспериментальные результаты предлагаемого метода внешней калибровки на наборах данных с неточными центрами сфер.
4.1. Результаты обнаружения круга
Чтобы показать эффективность предложенного метода обнаружения круга, мы использовали три различных набора данных.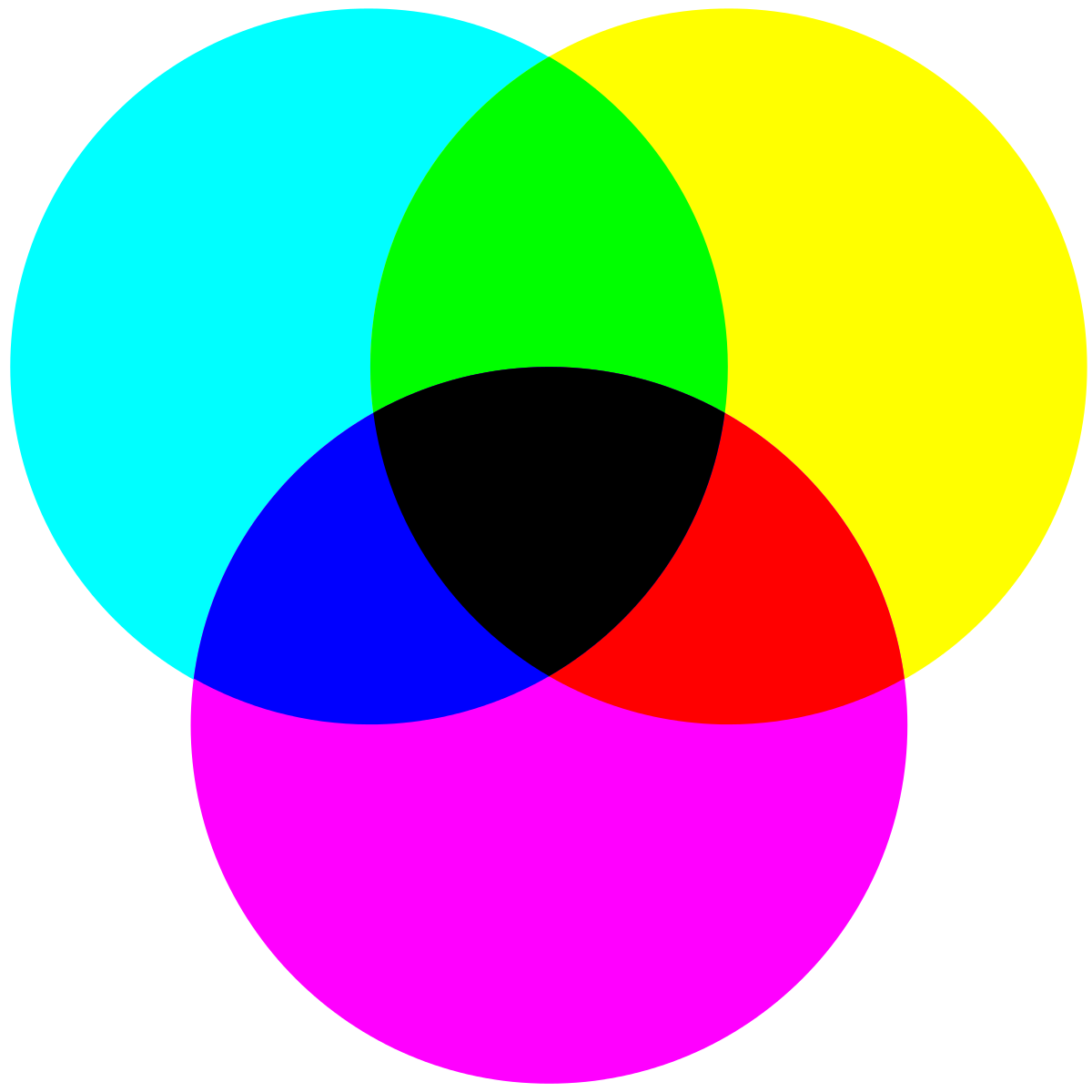 Первый набор данных (набор шариков из пенополистирола) взят из нашей предыдущей работы [21]. Набор данных состоит из 138 изображений красного шара из пенопласта, снятых в разных местах при разных условиях освещения. Размер изображений обычно составляет 360 × 480 пикселей. Набор данных содержит вручную записанные местоположения центров проецируемых областей сферы. Некоторые изображения включают синюю сферу; однако его предполагаемые местоположения не включены в набор данных.Из этих 138 изображений мы использовали в экспериментах 108 тестовых изображений. Средний цвет сферы был вычислен по оставшимся 30 обучающим изображениям.
Первый набор данных (набор шариков из пенополистирола) взят из нашей предыдущей работы [21]. Набор данных состоит из 138 изображений красного шара из пенопласта, снятых в разных местах при разных условиях освещения. Размер изображений обычно составляет 360 × 480 пикселей. Набор данных содержит вручную записанные местоположения центров проецируемых областей сферы. Некоторые изображения включают синюю сферу; однако его предполагаемые местоположения не включены в набор данных.Из этих 138 изображений мы использовали в экспериментах 108 тестовых изображений. Средний цвет сферы был вычислен по оставшимся 30 обучающим изображениям.
Второй и третий наборы данных были собраны заново, чтобы показать устойчивость предложенного метода к изменениям в объекте калибровки. Второй набор данных (набор гимнастических мячей) и третий набор данных (набор баскетбольных мячей) состоят из 131 изображения гимнастического мяча и 131 изображения баскетбола соответственно. Изображения были получены в тех же местах, что и набор шариков из пенополистирола. Гимнастический мяч однотонный, и его цвет очень похож на мяч из пенополистирола. Напротив, баскетбольный мяч имеет узор, и его цвет не похож на мяч из пенополистирола. Новые наборы данных не включают синюю сферу. Отметим, что параметры предложенного метода и метода Квона и др. [21] не были скорректированы для новых наборов данных. Это означает, что в этой статье постоянно используется средний цвет шара из пенополистирола.
Гимнастический мяч однотонный, и его цвет очень похож на мяч из пенополистирола. Напротив, баскетбольный мяч имеет узор, и его цвет не похож на мяч из пенополистирола. Новые наборы данных не включают синюю сферу. Отметим, что параметры предложенного метода и метода Квона и др. [21] не были скорректированы для новых наборов данных. Это означает, что в этой статье постоянно используется средний цвет шара из пенополистирола.
Предложенный метод сравнивался с тремя существующими методами.Первым методом был наш прежний метод, использующий цвет сферы и поиск по шаблону [21]. Вторым методом была реализация OpenCV [9] кругового преобразования Хафа (CHT) [36]. Наконец, третий метод (EDCircles) [44] был одним из лучших в недавней оценочной статье [45], исходный код которой общедоступен в Интернете. Мы использовали исходный код авторов с их параметрами по умолчанию. EDCircles соответствует эллипсу обнаруженной окружности с высоким эксцентриситетом. В этом случае для оценки мы используем исходный центр круга.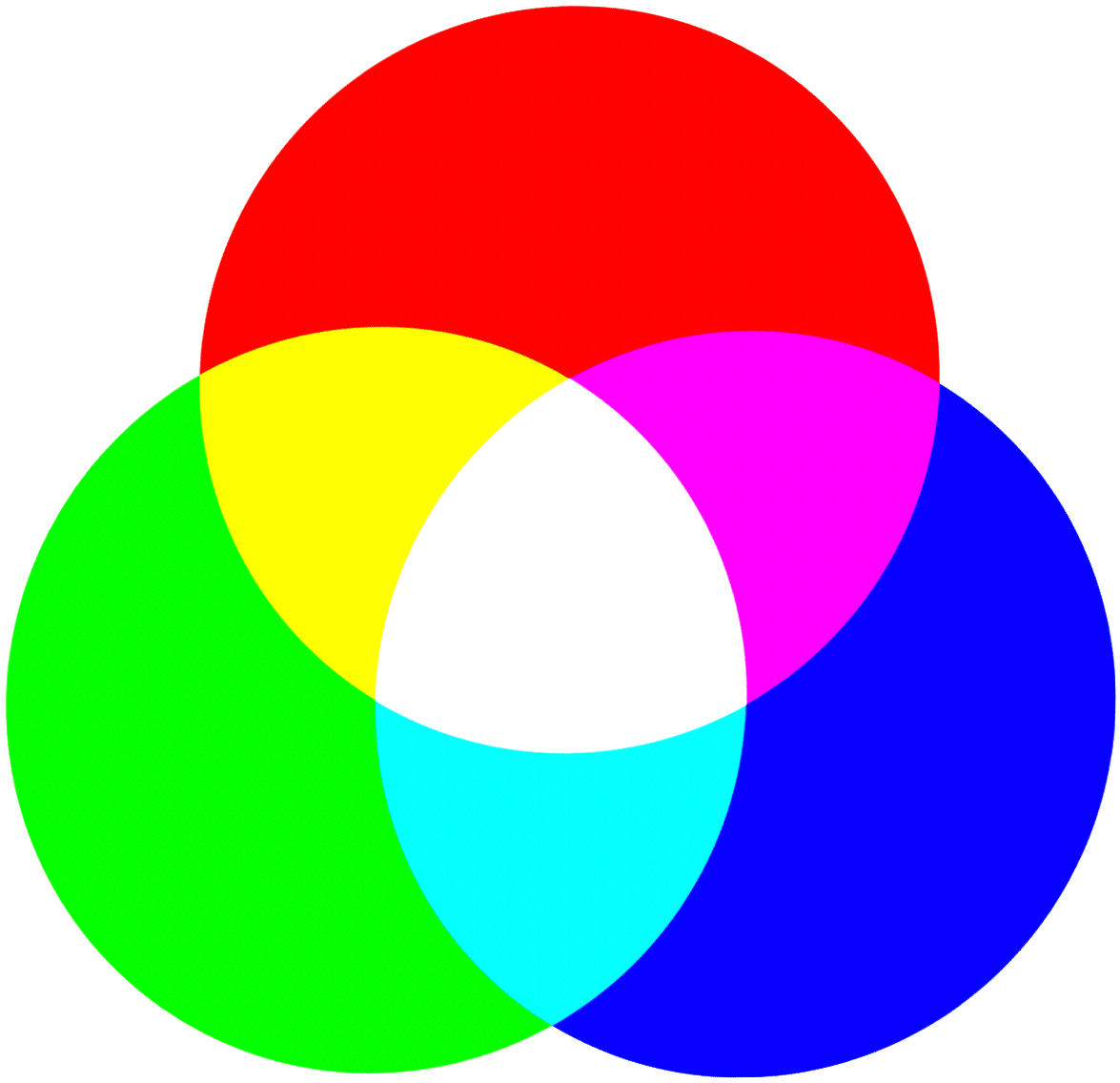 Мы также отмечаем, что EDCircles отклоняет ложные круги и иногда не возвращает круг.
Мы также отмечаем, что EDCircles отклоняет ложные круги и иногда не возвращает круг.
Круги, обнаруженные нашим методом, можно отсортировать в порядке возрастания согласно уравнению (7), чтобы найти лучший круг на изображении. Точно так же круги, обнаруженные тремя существующими методами, могут быть отсортированы в порядке убывания их собственной окружности. Таким образом, мы можем сравнить точность лучших кругов, а также верхних м и кругов.
Первые два метода [21,36], а также наш метод используют краевой детектор Кэнни [42].Мы использовали одни и те же параметры края Canny для всех трех методов. Кроме того, мы использовали такое же количество итераций MSAC, NS = 1000, для уточнения результатов [21]. Наконец, мы устанавливаем минимальный и максимальный радиус методов на одинаковые значения: минимальный установлен на 10 пикселей, а максимальный — на половину ширины или высоты изображения.
показывает точность методов на наборе шаров из пенополистирола. Ошибка на рисунке — это расстояние от наилучшего центра круга, обнаруженного методом, до его зарегистрированного вручную точного центра. Учитывая, что вручную записанные местоположения центров будут иметь ошибки, сделанные человеком-оператором, предложенный метод обеспечил точные результаты для всех тестовых изображений с максимальной ошибкой 10 пикселей. EDCircles дал результаты, аналогичные предлагаемому методу для большинства изображений. На рисунке a можно видеть, что длина кривой EDCircles по горизонтали короче других из-за ее способности ложного отклонения.
Учитывая, что вручную записанные местоположения центров будут иметь ошибки, сделанные человеком-оператором, предложенный метод обеспечил точные результаты для всех тестовых изображений с максимальной ошибкой 10 пикселей. EDCircles дал результаты, аналогичные предлагаемому методу для большинства изображений. На рисунке a можно видеть, что длина кривой EDCircles по горизонтали короче других из-за ее способности ложного отклонения.
Точность определения круга (набор шариков из пенополистирола). Ошибка — это расстояние от наилучшего центра круга, обнаруженного методом, до его зарегистрированного вручную точного центра.Для каждого метода ошибка отсортирована в порядке возрастания, поэтому индексы изображений не совпадают для разных методов. ( b ) был масштабирован от ( a ), чтобы показать количество обнаруженных кругов с небольшими ошибками. Лучше всего смотреться в цвете. CHT, Круговое преобразование Хафа.
показывает примерные результаты, полученные четырьмя методами. (1) показывает изображение, для которого все четыре метода дают хорошие результаты. Фон простой, а цветовая модель в (1) e точно локализует сферу.(2) и (3) показывают изображения с загроможденным фоном. CHT [36] не смог получить точных результатов на изображениях, в то время как EDCircles [44] точно обнаружил круги. Это связано с тем, что EDCircles обнаружил круги в длинных соединенных дугах, которые редко обнаруживаются на загроможденном фоне. (4) и (5) показывают изображения, для которых цветовая модель в [21] не смогла приписать высокую вероятность сфере. Следовательно, метод Квона и др. [21] не дал точных результатов. Интересно отметить, что EDCircles отклонил круг в (5).Наконец, (6) показывает изображение, содержащее большую синюю сферу. Поскольку CHT и EDCircles не используют информацию о цвете, они преимущественно нашли синюю сферу.
(1) показывает изображение, для которого все четыре метода дают хорошие результаты. Фон простой, а цветовая модель в (1) e точно локализует сферу.(2) и (3) показывают изображения с загроможденным фоном. CHT [36] не смог получить точных результатов на изображениях, в то время как EDCircles [44] точно обнаружил круги. Это связано с тем, что EDCircles обнаружил круги в длинных соединенных дугах, которые редко обнаруживаются на загроможденном фоне. (4) и (5) показывают изображения, для которых цветовая модель в [21] не смогла приписать высокую вероятность сфере. Следовательно, метод Квона и др. [21] не дал точных результатов. Интересно отметить, что EDCircles отклонил круг в (5).Наконец, (6) показывает изображение, содержащее большую синюю сферу. Поскольку CHT и EDCircles не используют информацию о цвете, они преимущественно нашли синюю сферу.
Четыре верхних круга, обнаруженные методами (набор шариков из пенополистирола). ( a ) Предлагаемый метод. ( b ) Kwon et al.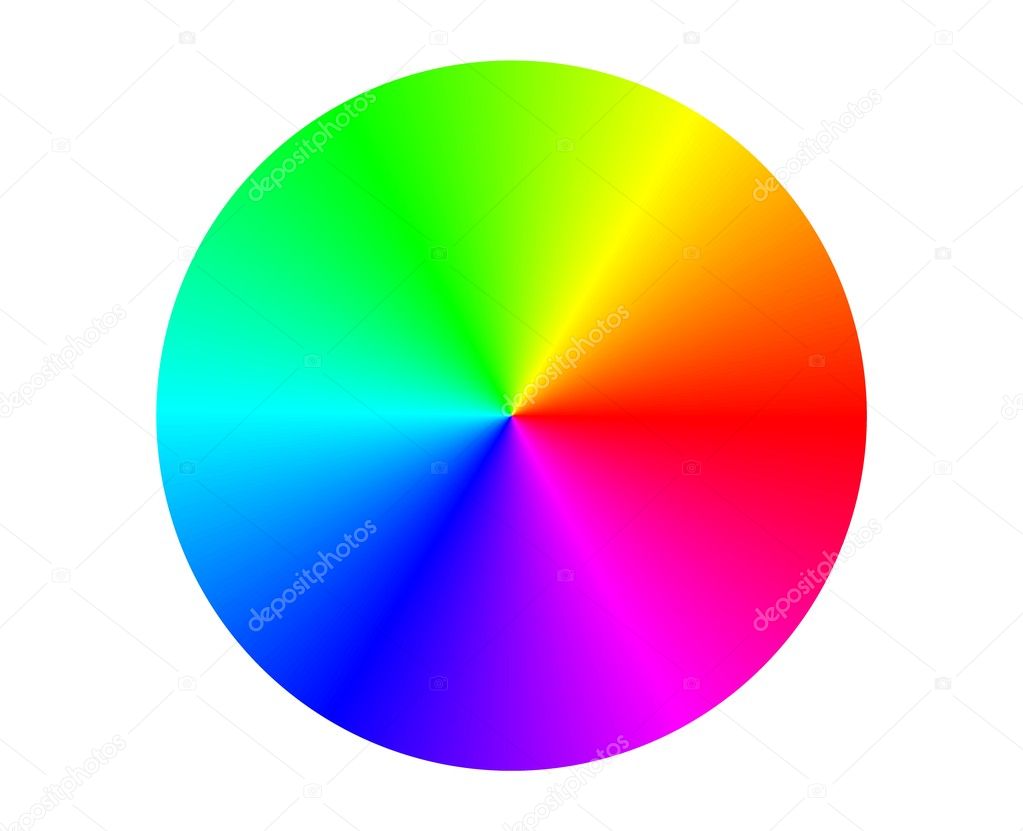 [21]. ( c ) CHT [36]. ( d ) EDCircles [44]. ( e ) Цветные вероятностные изображения [21]. Из ( a — d ) лучшие круги нарисованы желтым, а остальные — зеленым.Некоторые круги имеют аналогичные центры и радиусы в ( a , b ), поэтому количество кругов на изображениях может показаться меньше четырех. Лучше всего смотреться в цвете.
[21]. ( c ) CHT [36]. ( d ) EDCircles [44]. ( e ) Цветные вероятностные изображения [21]. Из ( a — d ) лучшие круги нарисованы желтым, а остальные — зеленым.Некоторые круги имеют аналогичные центры и радиусы в ( a , b ), поэтому количество кругов на изображениях может показаться меньше четырех. Лучше всего смотреться в цвете.
показывает точность методов на наборах гимнастических мячей и баскетбольных мячей. Предлагаемый метод превосходит существующие методы на двух новых наборах данных. В наборе с гимнастическим мячом метод Квона и др. Превзошел CHT и EDCircles. Мы предполагаем, что сходство цвета гимнастического мяча и мяча из пенополистирола является основной причиной лучших характеристик.Это предположение подтверждается ухудшением характеристик метода Квона и др. На баскетбольной площадке, как показано на b. Поскольку предлагаемый метод меньше полагается на информацию о цвете, он меньше страдает от ухудшения характеристик, чем метод Квона и др.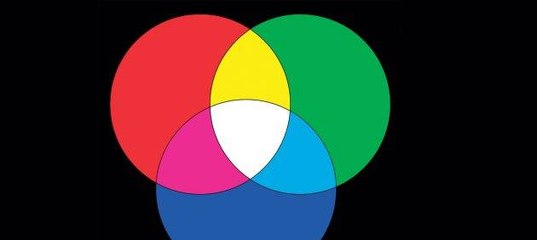 Также удивительно, что баскетбольный мяч был обнаружен на многих изображениях предложенным методом, несмотря на предположение, что сфера была монохроматической.
Также удивительно, что баскетбольный мяч был обнаружен на многих изображениях предложенным методом, несмотря на предположение, что сфера была монохроматической.
Точность обнаружения круга. ( a ) Набор мячей для спортзала. ( b ) Баскетбольный набор.Ошибка — это расстояние от наилучшего центра круга, обнаруженного методом, до его зарегистрированного вручную точного центра. Для каждого метода ошибка отсортирована в порядке возрастания, поэтому индексы изображений не совпадают для разных методов. Лучше всего смотреться в цвете.
и показывают примерные результаты для набора гимнастических мячей и набора баскетбольных мячей, соответственно. (1), (2) и (3) показывают случаи отказа EDCircles, а (4), (5) и (6) показывают случаи отказа предложенного метода. Из-за отсутствия информации о цвете EDCircles обнаружил человеческие головы или тени мяча в виде круга.Напротив, в предлагаемом методе за объект калибровки были приняты красные круглые области. Результаты демонстрируют тенденцию, аналогичную результатам в. Когда сфера была слишком маленькой, все четыре метода не дали результата, как показано в (5).
Результаты демонстрируют тенденцию, аналогичную результатам в. Когда сфера была слишком маленькой, все четыре метода не дали результата, как показано в (5).
Четыре круга, определяемых методами (набор гимнастических мячей). ( a ) Предлагаемый метод. ( b ) Kwon et al. [21]. ( c ) CHT [36]. ( d ) EDCircles [44]. Из ( a — d ) лучшие круги нарисованы желтым, а остальные — зеленым.Некоторые круги имеют аналогичные центры и радиусы в ( a ) и ( b ), поэтому количество кругов на изображениях может казаться меньше четырех. Лучше всего смотреться в цвете.
Четыре круга, обнаруженных методами (баскетбольная сетка). ( a ) Предлагаемый метод. ( b ) Kwon et al. [21]. ( c ) CHT [36]. ( d ) EDCircles [44]. Из ( a — d ) лучшие круги нарисованы желтым, а остальные — зеленым. Некоторые круги имеют аналогичные центры и радиусы в ( a , b ), поэтому количество кругов на изображениях может показаться меньше четырех. Лучше всего смотреться в цвете.
Некоторые круги имеют аналогичные центры и радиусы в ( a , b ), поэтому количество кругов на изображениях может показаться меньше четырех. Лучше всего смотреться в цвете.
Использование информации о цвете помогает предотвратить определение общих круглых форм в качестве калибровочного объекта особого цвета. Однако чрезмерная зависимость от информации о цвете имеет тенденцию быть источником ухудшения характеристик при изменении освещения. Предлагаемый метод основан на информации о цвете и краях, что позволяет сбалансировать надежность и ложное обнаружение.Отметим, что мы проверили результаты EDCircles с отключенным его ложным отклонением. Не было заметных отличий от результатов, представленных в этой статье.
4.2. Результаты внешней калибровки
Предлагаемый метод применим к любым камерам RGB-D, откалиброванным на заводе, при условии, что цветная камера имеет незначительные радиальные искажения. В этом разделе мы приводим экспериментальные результаты на наборах данных, полученных с помощью камер Kinect v2 [6]. Мы выбрали камеры Kinect v2 [6] по следующим причинам.Размер нашей лаборатории составляет 3,6 м × 3,9 м, а надежный рабочий диапазон камер Kinect v2 составляет 4,5 м. Кроме того, камеры Kinect v2 предоставляют выровненные пары цветных изображений и изображений глубины, как показано на. Камеры глубины, оснащенные камерами RGB-D, обычно имеют большие радиальные искажения; однако пары выровненных изображений, предоставляемые Kinect v2, неискажены. Точность внутренних и внешних параметров отдельных камер RGB-D важна для точной 3D-реконструкции. Однако анализ точности заводской калибровки выходит за рамки данной статьи.
Мы выбрали камеры Kinect v2 [6] по следующим причинам.Размер нашей лаборатории составляет 3,6 м × 3,9 м, а надежный рабочий диапазон камер Kinect v2 составляет 4,5 м. Кроме того, камеры Kinect v2 предоставляют выровненные пары цветных изображений и изображений глубины, как показано на. Камеры глубины, оснащенные камерами RGB-D, обычно имеют большие радиальные искажения; однако пары выровненных изображений, предоставляемые Kinect v2, неискажены. Точность внутренних и внешних параметров отдельных камер RGB-D важна для точной 3D-реконструкции. Однако анализ точности заводской калибровки выходит за рамки данной статьи.
Примеры выровненных и неискаженных пар цветных изображений и изображений глубины, снятых тремя камерами Kinect v2. Из ( a — f ) мы собрали статический набор путем захвата неподвижных изображений статической сферы. Из ( g, — l ) мы собрали динамический набор, сняв видео сферы, которую несет человек. Зеленые пустые кружки представляют собой области сферы, обнаруженные предлагаемым методом.
Зеленые пустые кружки представляют собой области сферы, обнаруженные предлагаемым методом.
Как показано на, наша система захвата состоит из трех редко размещенных камер Kinect v2, окружающих середину комнаты.Все три камеры были подключены к одному компьютеру с процессором Intel Core i7-4790 и 8 ГБ оперативной памяти под управлением Windows 10. Мы позволяем трем потокам захватывать три пары цветных изображений и изображений глубины одновременно; однако идеальной синхронизации добиться не удалось из-за асинхронной природы камер Kinect v2, как показано на c, d.
Наша установка камеры Kinect v2.
( a , b ) показывают примеры неправильно обнаруженных кругов. В ( c ) круг был точно обнаружен.Однако в ( d ) круглая область не соответствует области сферы на соответствующем изображении глубины из-за асинхронного характера камеры Kinect v2.
Для экспериментов мы получили три набора пар цветных и глубинных изображений. Первые два набора состоят из изображений красного шара из пенополистирола, радиус которого составляет 12,5 см. Поскольку большая сфера обеспечивает больше точек поверхности для установки сферы, большая сфера предпочтительна. Наш шар из пенополистирола был самым большим и легким среди имеющихся в продаже.Для анализа предлагаемого метода в основном использовались первые два набора.
Первые два набора состоят из изображений красного шара из пенополистирола, радиус которого составляет 12,5 см. Поскольку большая сфера обеспечивает больше точек поверхности для установки сферы, большая сфера предпочтительна. Наш шар из пенополистирола был самым большим и легким среди имеющихся в продаже.Для анализа предлагаемого метода в основном использовались первые два набора.
Первый набор — статический набор с идеальной синхронизацией. Чтобы собрать такие идеально синхронизированные пары изображений цвета и глубины, мы использовали подставку для фиксации сферы, как показано на a – f. Фотоснимки стенда делались вручную нажатием кнопки. Количество пар цветных и глубинных изображений составляло 95 (N = 95) на камеру, и в предлагаемом методе не хватало только одного центра сферы во всем наборе. Поскольку видимость отсутствующей сферы была автоматически установлена на ноль, статический набор не включал выбросов.
Второй набор представлял собой динамический набор, собранный с помощью видеозаписи шара из пенопласта, который несет человек. Набор состоял из 164 пар цветных изображений и изображений глубины на камеру (N = 164), с десятками отсутствующих сфер и неправильно обнаруженных сфер. показывает примеры неправильно обнаруженных сфер. В цветовом пространстве a * b * цвет кожи похож на цвет нашей сферы. Кроме того, на расстоянии лицо и рука кажутся круглыми. Поэтому предлагаемый метод иногда ошибочно принимал лицо и руку за сферу, как показано на а, б.Другой источник ошибок — асинхронный характер камеры Kinect v2, как показано на c, d.
Третий набор (статический баскетбольный набор) состоит из неподвижных изображений баскетбольного мяча. Этот набор был приобретен, чтобы показать устойчивость предложенного метода к изменениям в объектах калибровки. Мы уже показали, что баскетбольный мяч может быть обнаружен предложенным методом без настройки параметров. В этом подразделе мы покажем, что его действительно можно использовать для внешней калибровки. Набор состоит из 101 пары изображений цвета и глубины на камеру (N = 101).
Для сравнения мы применили метод внешней калибровки Su et al. [20]; для краткости реализация обозначена как Su et al. или метод Су и др. Поскольку наши наборы данных не включают фоновые изображения, мы использовали те же центры сфер, что и наши. Чтобы реализовать часть их попеременной оптимизации, связанную с уточнением позы, мы использовали библиотеку levmar [46]. Пакетная настройка предлагаемого нами метода также опирается на ту же библиотеку.
показывает траектории центров сфер статического набора.Для каждого метода все центры сфер в камере q были преобразованы в опорный кадр. Как показано на рисунке, парная оценка позы (попарно) и корректировка связки (BA) предложенного метода точно регистрировали траектории с разных камер. Метод Су и др. Также показал такое же соответствие, что и ВА.
Центры выровненных сфер (статический набор, N = 95). ( a ) Предлагаемый метод (попарный). ( b ) Предлагаемый метод (Bundle Adjustment (BA)).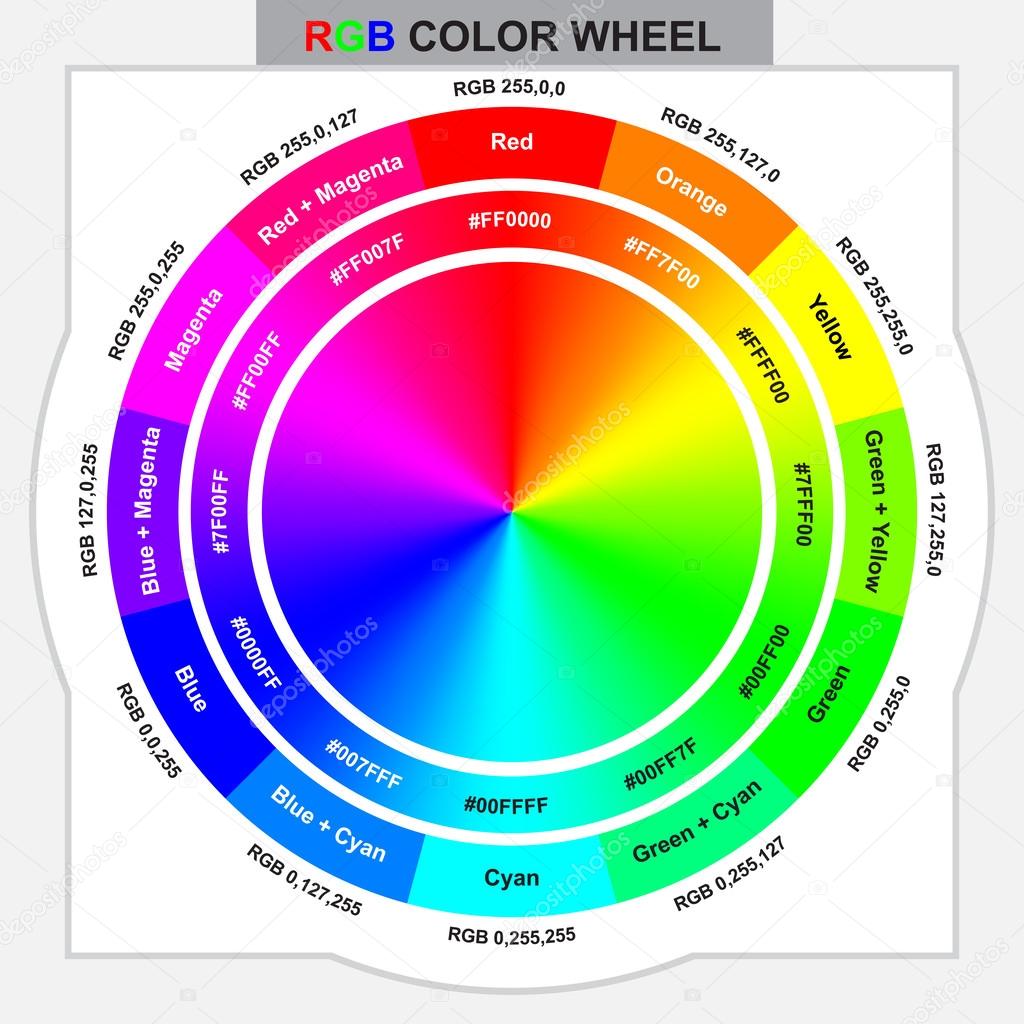 ( c ) Su et al. [20]. Обратитесь к тексту для более подробной информации. Лучше всего смотреться в цвете.
( c ) Su et al. [20]. Обратитесь к тексту для более подробной информации. Лучше всего смотреться в цвете.
показывает траектории центров сфер динамического набора. Предлагаемый метод показывает хорошее совмещение траекторий; однако метод Су и др. не смог оценить точные преобразования из-за неточных центров сфер (некоторые из них показаны на). Чтобы удалить выбросы, мы извлекли вставки для поз камеры, оцененные предложенным методом (BA) с порогом ошибки 12 см, и применили Su et al.К встроенному набору. Метод обозначен как Su et al. (встроенный набор), который дает результаты, эквивалентные предлагаемому методу, как показано в d.
Центры выровненных сфер (динамический набор, N = 164). ( a ) Предлагаемый метод (попарный). ( b ) Предлагаемый метод (BA). ( c ) Su et al. [20]. ( d ) Su et al. [20] (встроенный набор). Обратитесь к тексту для более подробной информации. Лучше всего смотреться в цвете.
a показывает количество переходов в соответствии с порогом ошибки.Здесь количество выступов определяется как количество троек соответствующих центров сфер, максимальное попарное расстояние которых меньше порога ошибки:
Numberofinliers = ∑i = 1N1 (max (∥Ci (1) -C˜i (2 ) ∥, ∥Ci (1) -C˜i (3) ∥, ∥C˜i (2) -C˜i (3) ∥) <порог ошибки),
(15)
где первая камера — это опорная камера, а 1 (x) — функция, возвращающая единицу, если x истинно, а в противном случае — ноль. C˜i (2) и C˜i (3) — положения центров сферы, преобразованные из второй и третьей камеры в опорный кадр.Все максимальные расстояния были менее 4 см для предложенного метода (BA) и метода Су и др. Кроме того, 98% максимальных расстояний для обоих методов были менее 3 см.
Количество переходников. На рисунках показано количество троек соответствующих центров сфер, максимальное попарное расстояние которых меньше порога ошибки. ( a ) Статический набор (N = 95). ( b ) Динамический набор (N = 164). Обратитесь к тексту для более подробной информации. Лучше всего смотреться в цвете.
b показывает количество переходов динамического набора.Предлагаемый метод (BA) и Su et al. (набор вставок) показал аналогичные результаты, в то время как исходный метод Су и др. показал только небольшое количество вставок, даже с большими порогами ошибок.
Чтобы проанализировать влияние количества точек, используемых для внешней калибровки, мы провели предложенную процедуру внешней калибровки, используя только первые кадры NF, и проверили точность калибровки, как показано на. а показывает результат на статическом наборе. Сфера на первых 29 кадрах статического набора вращалась на плоскости, что является причиной резкого увеличения количества выступов при NF = 30.Когда мы получаем неподвижные изображения сферического объекта, более важно избегать вырожденных конфигураций, чем просто увеличивать количество изображений. Учитывая, что центр одной сферы находится вне плоскости, количество выступов немедленно сходится к максимальному значению. Напротив, когда мы получаем видео со свободно движущейся сферой, полезно использовать большое количество кадров, как показано на b. Количество выступов с порогом ошибки 5 см сходится при NF = 40; однако с порогом ошибки 3 см он достигает максимума при NF = 120.Мы предполагаем, что разница между статическим набором и динамическим набором вызвана несовершенной синхронизацией нашей системы.
Количество выступов по количеству центров сфер NF, используемых для внешней калибровки (предлагаемый метод). На рисунках показано количество троек соответствующих центров сфер, максимальное попарное расстояние которых меньше порога ошибки. ( a ) Статический набор (N = 95). ( b ) Динамический набор (N = 164). Обратитесь к тексту для более подробной информации.Лучше всего смотреться в цвете.
показывает объединенные трехмерные облака точек, полученные с помощью методов. Слитые вместе изображения глубины взяты из динамического набора. Предлагаемые методы (попарный и БА) и Su et al. (набор вставок) показывают визуально похожие результаты, в то время как Su et al. не удается выровнять облака точек, как показано на c, g.
Результаты рендеринга (динамический набор). ( a ) Обзор окружающей среды. Трехмерные облака точек с разных камер были нарисованы разными цветами. ( b ) Предлагаемый метод (BA).( c ) Su et al. [20]. ( d ) Su et al. (набор inlier). ( e ) Предлагаемый метод (попарный). ( f ) Предлагаемый метод (BA). ( г, ) Su et al. [20]. ( ч ) Su et al. [20] (встроенный набор). Обратитесь к тексту для более подробной информации. Лучше всего смотреться в цвете.
показывает пары изображений цвета и глубины из статического баскетбольного набора. Результаты обнаружения круга показали аналогичную тенденцию для статических и динамических наборов. В a предлагаемый метод обнаружения круга находит несуществующий круг из-за окклюзии.Предлагаемый метод может использовать уравнение (7) для отбрасывания таких несуществующих кругов. Мы, однако, полагались на надежные функции стоимости в процедуре внешней калибровки, потому что отклонение требует другого порога и никогда не будет идеальным. Если калибровочный объект не существует на большинстве изображений, такой метод отбраковки будет необходим.
Примеры выровненных и неискаженных пар цветных и глубинных изображений статического баскетбольного набора. Зеленые пустые кружки представляют собой области сферы, обнаруженные предлагаемым методом.( a ), ( b ), ( c ) показывают соответствующие цветные изображения, а ( d ), ( e ), ( f ) показывают соответствующие им изображения глубины. ( g ), ( h ), ( i ) показывают еще одну тройку соответствующих цветных изображений, а ( j ), ( k ), ( l ) показывают соответствующие им изображения глубины.
показывает точность калибровки баскетбольного набора. Формы кривых предложенного метода в c очень похожи на статический набор.Мы предполагаем, что это происходит потому, что мы минимизировали проблему синхронизации, получая неподвижные изображения баскетбольного мяча. Напротив, форма кривой Su et al. [20] был совершенно другим из-за наличия выбросов. b показывает, что центры сфер в камерах 2 и 3 неточно преобразованы в опорный кадр. Точности калибровки также можно сравнить в, где показаны слитые трехмерные облака точек, полученные с помощью методов.
Центры выровненных сфер и количество выступов (статический баскетбольный набор, N = 101).( a ) Предлагаемый метод (BA). ( b ) Su et al. [20]. ( c ) Количество вставок. Обратитесь к тексту для более подробной информации. Лучше всего смотреться в цвете.
Результаты рендеринга (статический баскетбольный набор). ( a , c ) Предлагаемый метод (BA). ( b , d ) Su et al. [20]. Обратитесь к тексту для более подробной информации. Лучше всего смотреться в цвете.
4.3. Время вычисления
Мы измерили вычисление предлагаемого метода и метода Су и др., Используя компьютер с процессором Intel Core i5-7300U и 4 ГБ оперативной памяти, работающий под управлением Windows 10.Мы запускали два метода 100 раз и показываем среднее время вычислений. Время вычисления предложенной оценки попарной позы было примерно в 10 000 раз больше, чем у Су и др. Это связано с тем, что предлагаемый метод основан на 10 000 случайных выборок для определения наилучшей позы между камерами. Алгоритм альтернативной оптимизации для настройки пакета, предложенный Su et al. высокоэффективен и примерно в 10 раз быстрее предложенного метода. Это главный недостаток предлагаемого метода.
Таблица 2
Среднее время вычисления предложенного метода и Su et al. [20].
| Метод | Стадия | Статический набор (N = 95) | Динамический набор (N = 164) |
|---|---|---|---|
| Предлагаемый | Обнаружение круга (на изображение) | 53,5 мс | 60,5 мс |
| Предлагаемое | Подгонка сферы (для каждой области) | 327 мс | 313 мс |
| Предлагаемое | Оценка парной позы (для каждой пары камер) | 776 мс | 1.28 с |
| Предложено | Регулировка связки | 29,6 с | 149 с |
| Su et al. [20] | Оценка парной позы (для каждой пары камер) | 78,3 мкс | 82,3 мкс |
| Su et al. [20] | Настройка связки | 2,09 с | 3,51 с |
5. Выводы
В этой статье мы предложили полностью автоматизированный метод внешней калибровки нескольких камер RGB-D.Предлагаемый метод использует монохроматический сферический объект в качестве калибровочной цели, и мы предложили метод обнаружения объекта, основанный на предположении, что его область проекции круглая. Устойчивость к изменениям фона или освещения — важное качество метода обнаружения. Однако чрезмерная надежность может привести к ложному обнаружению калибровочного объекта. Наш метод обнаружения круга был разработан, чтобы уравновесить надежность и ложное обнаружение, поэтому можно использовать аналогичный объект, такой как баскетбольный мяч, вместо изученного объекта калибровки без настройки параметров.
С другой стороны, выбросы неизбежны в любой практической системе распознавания образов. Предлагаемый метод обнаружения круга готов к уменьшению выбросов на различных этапах; однако параметры отклонения могут не работать в других объектах или средах. Нашим выбором было полагаться на надежные функции потерь, чтобы точку, установленную с выбросами, можно было безопасно использовать для внешней калибровки. Эксперименты показали, что предложенный метод устойчив к ошибочно обнаруженным центрам сфер. Эксперименты также показали, что важно избегать вырожденных конфигураций и что важно увеличивать количество кадров, чтобы преодолеть несовершенную синхронизацию.
Недостатком предлагаемого метода является неэффективность его пакетной регулировки. Используя камеры RGB-D, подключенные к их собственным компьютерам, можно развернуть этапы обнаружения сфер и парной оценки позы на компьютерах, чтобы главный компьютер выполнял только настройку связки. В этом случае узким местом действительно является настройка пакета. В нашей будущей работе будут проводиться дополнительные исследования, чтобы снизить вычислительную сложность.
Благодарности
Мы благодарим всех рецензентов за их проницательные и конструктивные комментарии, которые во многом помогли сформировать эту статью к лучшему.
Вклад авторов
Концептуализация, Y.H. и O.C .; методология, O.C .; программное обеспечение, Y.C.K., J.W.J. и O.C .; проверка, Y.C.K. и O.C .; формальный анализ, O.C .; курирование данных, Y.C.K .; написание, подготовка оригинального черновика, Y.C.K. и O.C .; написание, обзор и редактирование, Y.C.K., J.W.J. и O.C .; визуализация, Y.C.K., J.W.J. и O.C .; надзор, O.C .; администрация проекта, Ю. и O.C .; привлечение финансирования, Y.H.
Финансирование
Эта работа была частично поддержана исследовательским грантом Инчхонского национального университета в 2016 году и частично грантом «Межведомственный проект Giga KOREA», финансируемым правительством Кореи (MSIT) (No.GK18P0200, Разработка гиперреалистичной сервисной технологии на основе 4D реконструкции и динамической деформируемой модели действия).
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Ссылки
1. Шоттон Дж., Фицгиббон А., Кук М., Шарп Т., Финоккио М., Мур Р., Кипман А., Блейк А. Распознавание позы человека в реальном времени по частям из изображений с одной глубиной; Материалы конференции IEEE по компьютерному зрению и распознаванию образов; Колорадо-Спрингс, Колорадо, США.20–25 июня 2011 г .; С. 1297–1304. [Google Scholar] 2. Шарп Т., Кескин К., Робертсон Д., Тейлор Дж., Шоттон Дж., Ким Д., Риман К., Лейхтер И., Винников А., Вей Ю. и др. Точное, надежное и гибкое отслеживание рук в реальном времени; Материалы ежегодной конференции ACM по человеческому фактору в вычислительных системах; Сеул, Корея. 18–23 апреля 2015 г .; С. 3633–3642. [Google Scholar] 3. Ньюкомб Р.А., Изади С., Хиллиджес О., Молино Д., Ким Д., Дэвисон А.Дж., Коли П., Шоттон Дж., Ходжес С., Фитцгиббон А. KinectFusion: картографирование и отслеживание плотной поверхности в реальном времени; Материалы Международного симпозиума IEEE по смешанной и дополненной реальности; Базель, Швейцария.26–29 октября 2011 г .; С. 127–136. [Google Scholar] 4. Эндрес Ф., Хесс Дж., Штурм Дж., Кремерс Д., Бургард В. Трехмерное картографирование с помощью камеры RGB-D. IEEE Trans. Робот. 2013; 30: 177–187. DOI: 10.1109 / TRO.2013.2279412. [CrossRef] [Google Scholar] 8. Чжан З. Новая гибкая техника калибровки камеры. IEEE Trans. Pattern Anal. Мах. Intell. 2000; 22: 1330–1334. DOI: 10.1109 / 34.888718. [CrossRef] [Google Scholar] 9. Брадски Г. Библиотека OpenCV. J. Softw доктора Добба. Инструменты. 2000. 120: 122–125. [Google Scholar] 10.Свобода Т., Мартинец Д., Пайдла Т. Удобная многокамерная самокалибровка для виртуальных сред. Присутствие. 2005. 14: 407–422. DOI: 10,1162 / 105474605774785325. [CrossRef] [Google Scholar] 11. Reynolds M., Doboš J., Peel L., Weyrich T., Brostow G.J. Уверенный сбор данных по времени пролета; Материалы конференции компьютерного общества IEEE по компьютерному зрению и распознаванию образов; Колорадо-Спрингс, Колорадо, США. 20–25 июня 2011 г .; С. 1–8. [Google Scholar] 12. Агравал М., Дэвис Л.С. Калибровка камеры с использованием сфер: полуопределенный подход к программированию; Материалы Международной конференции IEEE по компьютерному зрению; Ницца, Франция.13–16 октября 2003 г .; С. 782–789. [Google Scholar] 13. Чжан Х., Вонг К.Ю.К., Чжан Г. Калибровка камеры по изображениям сфер. IEEE Trans. Pattern Anal. Мах. Intell. 2007. 29: 499–503. DOI: 10.1109 / TPAMI.2007.45. [PubMed] [CrossRef] [Google Scholar] 14. Гуан Дж., Дебовери Ф., Слембрук М., Ван Херенборг Д., Ван Каувелаерт Д., Вилаерт П., Филипс У. Внешняя калибровка сетей камер с использованием сферы. Датчики. 2015; 15: 18985–19005. DOI: 10.3390 / s150818985. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 15.Шен Дж., Сюй В., Ло Ю., Су П.С., Чунг С.С.С. Внешняя калибровка для сети камер RGB-D с широкой базой; Материалы международного семинара по обработке мультимедийных сигналов; Джакарта, Индонезия. 22–24 сентября 2014 г. [Google Scholar] 16. Руан М., Хубер Д. Калибровка 3D-сенсоров по сферической мишени; Материалы Международной конференции по 3D Vision; Токио, Япония. 8–11 декабря 2014 г .; С. 187–193. [Google Scholar] 17. Старанович А.Н., Браун Г.Р., Морбиди Ф., Мариоттини Г.Л. Практическая и точная калибровка камер RGB-D с использованием сфер.Comput. Vision Image Underst. 2015; 137: 102–114. DOI: 10.1016 / j.cviu.2015.03.013. [CrossRef] [Google Scholar] 18. Старанович А.Н., Рэй К., Мариоттини Г.Л. Простая в использовании, общая и точная калибровка с несколькими Kinect и ее применение для мониторинга походки для прогнозирования падений; Труды Ежегодной Международной конференции Общества инженеров IEEE в медицине и биологии; Милан, Италия. 25–29 августа 2015 г .; С. 4994–4998. [PubMed] [Google Scholar] 19. Ли Дж. Х., Ким Э. С., Пак С. Ю. Компенсация ошибок синхронизации системы многовидового 3D-моделирования RGB-D; Материалы Азиатской конференции по семинарам по компьютерному зрению; Тайбэй.20–24 ноября 2016 г .; С. 162–174. [Google Scholar] 20. Su P.C., Shen J., Xu W., Cheung S.C.S., Luo Y. Быстрая и надежная внешняя калибровка для сетей камер RGB-D. Датчики. 2018; 18: 235. DOI: 10,3390 / s18010235. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 21. Kwon Y.C., Jang J.W., Choi O. Автоматическое обнаружение сфер для внешней калибровки нескольких камер RGBD; Материалы Международной конференции по управлению, автоматизации и системам; Тэгваллён, Корея. 17–20 октября 2018 г .; стр.1451–1454. [Google Scholar] 22. Хартли Р., Зиссерман А. Многоканальная геометрия в компьютерном зрении. 2-е изд. Издательство Кембриджского университета; Кембридж, Великобритания: 2003. [Google Scholar] 23. Торр П.Х.С., Зиссерман А. МЛЕСАК: новый надежный инструмент оценки с приложением для оценки геометрии изображения. Comput. Vision Image Underst. 2000. 78: 138–156. DOI: 10.1006 / cviu.1999.0832. [CrossRef] [Google Scholar] 24. Фуа С., Аленья Г., Торрас К. Времяпролетные камеры с синхронизацией по времени (ToF): обзор. IEEE Sens. J. 2011; 11: 1917–1926. DOI: 10.1109 / JSEN.2010.2101060. [CrossRef] [Google Scholar] 25. Хошелхам К., Эльберинк С.О. Точность и разрешение данных глубины Kinect для картографических приложений внутри помещений. Датчики. 2012; 12: 1437–1454. DOI: 10.3390 / s120201437. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 26. Ким Ю.С., Кан Б., Лим Х., Чой О., Ли К., Ким Дж.Д.К., Ким С. Снижение шума на основе параметрической модели для датчиков глубины ToF. Proc. ШПИОН. 2012; 8290: 82900A. [Google Scholar] 27. Чой О., Ли С., Лим Х. Межкадровая согласованная многочастотная фазовая развертка для времяпролетных камер.Опт. Англ. 2013; 52: 057005. DOI: 10.1117 / 1.OE.52.5.057005. [CrossRef] [Google Scholar] 28. Ким Ю.М., Чан Д., Теобальт С., Трун С. Проектирование и калибровка системы слияния многовидовых датчиков TOF; Материалы конференции IEEE Computer Society по компьютерному зрению и семинарам по распознаванию образов; Анкоридж, AK, США. 23–28 июня 2008 г. [Google Scholar] 29. Herrera C.D., Kannala J., Heikkilä J. Совместная калибровка камеры глубины и цвета с коррекцией искажений. IEEE Trans. Pattern Anal. Мах. Intell.2012; 34: 2058–2064. DOI: 10.1109 / TPAMI.2012.125. [PubMed] [CrossRef] [Google Scholar] 30. Jung J., Lee J.Y., Jeong Y., Kweon I. Калибровка датчика времени пролета для пары цветных камер и камер глубины. IEEE Trans. Pattern Anal. Мах. Intell. 2015; 37: 1501–1513. DOI: 10.1109 / TPAMI.2014.2363827. [PubMed] [CrossRef] [Google Scholar] 31. Бассо Ф., Менегатти Э., Претто А. Надежная внутренняя и внешняя калибровка камер RGB-D. IEEE Trans. Робот. 2018; 34: 1315–1332. DOI: 10.1109 / TRO.2018.2853742. [CrossRef] [Google Scholar] 32.Ян Р.С., Чан Й.Х., Гонг Р., Нгуен М., Строцци А.Г., Дельмас П., Гимель’фарб Г., Абабу Р. Реконструкция сцены Multi-Kinect: несоответствия калибровки и глубины; Труды Международной конференции по вычислениям изображения и зрения; Веллингтон, Новая Зеландия. 27–29 ноября 2013 г .; С. 47–52. [Google Scholar] 33. Ха Дж.Э. Внешняя калибровка фотоаппарата и лазерного дальномера с использованием новой калибровочной структуры плоскости с треугольным отверстием. Int. J. Control Autom. Syst. 2012; 10: 1240–1244. DOI: 10.1007 / s12555-012-0619-7. [CrossRef] [Google Scholar] 34. Фернандес-Мораль Э., Гонсалес-Хименес Дж., Ривес П., Аревало В. Внешняя калибровка набора дальномерных камер за 5 секунд без шаблона; Материалы Международной конференции IEEE / RSJ по интеллектуальной робототехнике и системам; Чикаго, Иллинойс, США. 14–18 сентября 2014 г .; С. 429–435. [Google Scholar] 35. Перес-Юс А., Фернандес-Мораль Э., Лопес-Николас Г., Герреро Дж. Дж., Ривес П. Внешняя калибровка нескольких камер RGB-D по линейным наблюдениям.Робот IEEE. Автомат. Lett. 2018; 3: 273–280. DOI: 10.1109 / LRA.2017.2739104. [CrossRef] [Google Scholar] 36. Баллард Д.Х. Обобщение преобразования Хафа для обнаружения произвольных форм. Распознавание образов. 1981; 13: 111–122. DOI: 10.1016 / 0031-3203 (81)-1. [CrossRef] [Google Scholar] 37. Фишлер М.А., Боллес Р.С. Консенсус случайной выборки: парадигма для подгонки модели с приложениями для анализа изображений и автоматизированной картографии. Commun. ACM. 1981; 24: 381–395. DOI: 10.1145 / 358669.358692. [CrossRef] [Google Scholar] 38.Триггс Б., Маклаучлан П.Ф., Хартли Р.И., Фицгиббон А.В. Регулировка связки — современный синтез. В: Триггс Б., Зиссерман А., Селиски Р., редакторы. Алгоритмы зрения: теория и практика. Springer; Берлин / Гейдельберг, Германия: 2000. С. 298–372. [Google Scholar] 39. Левенберг К. Метод решения некоторых нелинейных задач наименьших квадратов. В. Прил. Математика. 1944; 2: 164–168. DOI: 10,1090 / QAM / 10666. [CrossRef] [Google Scholar] 40. Марквардт Д. Алгоритм оценки нелинейных параметров методом наименьших квадратов.SIAM J. Appl. Математика. 1963; 11: 431–441. DOI: 10,1137 / 0111030. [CrossRef] [Google Scholar] 41. Шапиро Л., Штокман Г. Компьютерное зрение. Пирсон; Река Аппер Сэдл, Нью-Джерси, США: 2001. [Google Scholar] 42. Кэнни Дж. Вычислительный подход к обнаружению краев. IEEE Trans. Pattern Anal. Мах. Intell. 1986; ПАМИ-8: 679–698. DOI: 10.1109 / TPAMI.1986.4767851. [PubMed] [CrossRef] [Google Scholar] 43. Лачат Э., Мачер Х., Ландес Т., Груссенмейер П. Оценка и калибровка камеры RGB-D (сенсор Kinect v2) для потенциального использования для трехмерного моделирования с близкого расстояния.Дистанционный датчик 2015; 7: 13070–13097. DOI: 10.3390 / RS71013070. [CrossRef] [Google Scholar] 44. Акинлар К., Топал С. EDCircles: Круговой детектор в реальном времени с контролем ложного обнаружения. Распознавание образов. 2013; 46: 725–740. DOI: 10.1016 / j.patcog.2012.09.020. [CrossRef] [Google Scholar] 45. Барни Смит Э. Х., Ламирой Б. Повторная оценка эффективности обнаружения круга. В: Ламирой Б., Дуэйр Линс Р., редакторы. Графическое распознавание. Текущие тенденции и вызовы. Springer International Publishing; Чам, Швейцария: 2017.С. 3–18. [Google Scholar]
пригородных школ вышли из пандемии с новой устойчивостью
Новые данные Бюро переписи населения подтверждают беспокойство по поводу трудностей, которые ждут школы Америки: слишком много учеников остаются в стороне. Набор в октябре 2020 года снизился почти на 3 миллиона студентов по сравнению с 2019 годом. Это согласуется с июньским отчетом Национального центра статистики образования (NCES), который показал, что прием до K-12 в 2020-2021 годах снизился на 3 процента по сравнению с годом ранее. .Наибольшее падение посещаемости NCES обнаружило на уровне дошкольных учреждений и детских садов. Этот показатель снизился на 13 процентов, что, возможно, отражает сложность предоставления дистанционного обучения самым юным ученикам. Марк Шнайдер, директор Института педагогических наук, выразил особую озабоченность по этому поводу, когда NCES опубликовал данные, полученные от государственных образовательных агентств. «Исследования показывают, что эти первые годы очень важны для того, чтобы помочь студентам добиться успеха в учебе и обществе», — сказал он.
Население младше 18 лет сократилось более чем на миллион в период с 2010 по 2020 год. По словам Дэна Доменека, исполнительного директора Американской ассоциации школьных администраторов (AASA), в течение некоторого времени наблюдается тенденция к снижению охвата школьным образованием. Но эта тенденция усилилась во время пандемии, поскольку учащиеся предпочли не участвовать в онлайн-обучении и выбыли из школьных списков.
«Их больше нет, и многие школьные округа ищут их, нанимают персонал, чтобы они пошли к ним домой, чтобы найти и вернуть», — говорит он.Некоторые родители решили обучать своих детей на дому, иногда формируя небольшие группы и нанимая учителей, что Доменек характеризует как «получастную» школу.
В рамках своих усилий по оказанию помощи Конгресс предоставил в общей сложности около 190 миллиардов долларов в Фонд помощи начальным и средним школам (ESSER), чтобы помочь школам K-12 пережить пандемию и подготовиться к безопасному открытию. На сегодняшний день Департамент образования не отслеживает подробно, как были потрачены эти деньги.
«Реальность такова, что большинство школьных округов в Америке — это небольшие сельские и пригородные школы», — говорит Доменек. «Крупные городские районы, о которых мы часто слышим, составляют меньшинство».
Также неверно предполагать, что пригородные районы по своей природе менее разнообразны. Хотя это верно в некоторых сообществах, в национальном масштабе более половины чернокожих, латиноамериканцев и американцев азиатского происхождения в крупных мегаполисах живут в пригородах, а не в городе.Еще десять лет назад анализ данных переписи, проведенный Институтом Брукингса, показал, что доля меньшинств в пригородах примерно такая же, как и в общей численности населения США.
Борьба с пандемией в больших городах на северо-востоке хорошо задокументирована. В настоящее время заболеваемость в регионе снижается. Школьные округа, обслуживающие сельские и пригородные сообщества в Пенсильвании и Нью-Йорке, находят способы восстановить свои отношения со студентами и родителями.
Школьные учреждения по радио
Школьный округ Батлер-Зона расположен примерно в получасе езды к северу от Питтсбурга, штат Пенсильвания, и включает 11 школ площадью более 150 квадратных миль. Его 6300 студентов приезжают как из сельских, так и пригородных сообществ, а также из города Батлер. По словам суперинтенданта Брайана Уайта, около 45% получают обеды бесплатно или по сниженным ценам. Набор в 2020-2021 гг. Аналогичен зачислению в предыдущий год: 2000 студентов выбрали киберпространство округа.
Демографический состав округа и различные ожидания в нем относительно того, какой должна быть школа, создают уникальные проблемы, говорит Уайт.Некоторые из них вызвали резкое облегчение, когда впервые было приказано закрыть школы.
«У нас есть все проблемы, связанные с отсутствием широкополосной связи в сельской Америке, но у нас также есть бедность в центре нашего района, в городе», — говорит он. «У всех этих студентов не было доступа к Интернету».
На март 2020 года в округе было 2 500 устройств на 6 400 учащихся. Пока он собирал Chromebook, планшеты и компьютеры из своих компьютерных лабораторий, чтобы получить все необходимое для обслуживания каждой семьи, округ в течение двух недель транслировал уроки по местной радиостанции.(Один из этих уроков получил награду от вещательной ассоциации штата.)
Местная кабельная компания помогла Уайту внедрить широкополосную связь в каждый дом, где это возможно, а остальным были предоставлены горячие точки. Устройства, изъятые из компьютерных лабораторий, достались студентам. Пока это продолжалось, школьный библиотекарь обучал учителей преподавать онлайн, используя курс, который она разработала до пандемии в контексте своего профессионального развития.
Радиопередачи закончились, и благодаря этим совместным усилиям район прошел через первую стадию пандемии.Когда появилась возможность возобновить очное обучение, студентам был предложен выбор: очное обучение, асинхронное дистанционное обучение или интерактивное обучение в классе с возможностью переключения каждые три недели.
Небольшие классы, двойное укомплектование персоналом и творческое использование школьных помещений позволили сохранить личные классы небольшими по размеру и безопасными, а также поддержать кибер-обучение. Но к тому времени, когда наступило прошлое лето, стало ясно, что разрыв в достижениях увеличился.
Чтобы решить эту проблему, округ решил переключить передачи и подчеркнуть важность взаимоотношений в процессе обучения.
В начале года округ сосредоточил свои усилия на построении отношений между всеми заинтересованными сторонами — директорами и учителями, учителями друг с другом и с учениками, учениками друг с другом и школами с семьями и сообществами. «Идея заключалась в том, что мы поработаем над этим, затем укрепим доверие, поставим цели, а затем действительно начнем говорить о том, как учиться», — говорит Уайт.
Учащиеся начальной школы в кампусе школьного округа Батлер-Район участвуют в проекте, который курирует консультативный совет местных фермеров, что является частью усилий округа по укреплению отношений, обостренных пандемией.(Школьный округ Батлер)
Фермы, магазины и судебный процесс
Усилия округа по привлечению семей включали разработку возможностей обучения, отражающих местные приоритеты. У начальной школы в одном районе есть кампус площадью 20 акров. «Идея сельского хозяйства действительно находила отклик у них», — говорит Уайт. «Мы устанавливаем теплицы, мы устанавливаем ферму с рождественскими елками, фруктовые деревья, грядки, на которых выращивают овощи». Консультативная группа фермеров помогает учителям, родителям и ученикам разрабатывать программы в школе.
В более городской начальной школе в районе общественные группы создали партнерство со школой на основе обслуживания, перестроив библиотеку как «магазин», который может бесплатно предоставлять товары, необходимые учащимся для школы. Планирование этих проектов создало чувство волнения по поводу будущего района, что стало долгожданным противовесом стрессам затяжной пандемии.
Уайт столкнулся с уникальным препятствием в достижении консенсуса в отношении приказов общественного здравоохранения. Департамент здравоохранения Пенсильвании потребовал, чтобы школы с очным обучением подписали свидетельство о том, что они будут соблюдать его руководящие принципы для школ, которые включают использование маскировки лица.
«Это очень, очень консервативный район, и наш школьный совет серьезно возражал против этого», — говорит Уайт. Изначально считалось, что аттестацию не подписывают. Вместо этого он подписал его в знак протеста и подал иск против губернатора и государственных секретарей образования и здравоохранения, судебный процесс по которому до сих пор ведется.
Это создало для белых не один парадокс. Как он сообщил правлению, одним из результатов судебного процесса стало усиление давления на округ, чтобы он как можно строже следовал руководящим принципам.В то же время родители, сомневающиеся в маскировке, спрашивают, почему ученики должны носить маски, если школьный совет выступает против постановления государства.
Что кажется наиболее эффективным, так это выслушивание родителей, признание их разочарования и уделение времени — лично, в тысячах телефонных звонков, через регулярные электронные письма — для того, чтобы ответить на конкретные проблемы родителей и прояснить правила и распоряжения, регулирующие порядок воспитания детей. район необходим для работы.
«Я всегда говорю, что они должны поговорить со своим врачом.Я не чиновник общественного здравоохранения, я суперинтендант, — говорит Уайт. «Я всегда пытаюсь вернуться к этому, к голосам, которые я слушаю, и к тому, что я слышу».
Летние занятия дали ученикам школьного округа Эйвонворт возможность участвовать в проектах, которые были невозможны в течение года дистанционного обучения. (Школьный округ Эйвонворт)
Обед со студентами
Демография школьного округа Эйвонворт, расположенного к северу от Питтсбурга, сильно отличается от демографического состава округа Батлер-айон.Он имеет два кампуса и обслуживает около 1900 студентов, преимущественно обеспеченных и белых; всего 10 процентов его посетителей — цветные студенты, и около 14 процентов получают бесплатный или льготный обед. Прием в округа продолжал расти за последние три года, несмотря на национальные тенденции.
Округ предоставил устройство каждому ученику до прибытия COVID-19, и это значительно упростило его немедленный переход на дистанционное обучение. Персонал смог быстро перейти от обучения в классе к дистанционному виртуальному обучению.«Наши учителя были фантастическими», — говорит суперинтендант Джефф Хэдли.
Хэдли считал жизненно важным, чтобы ученики K-6 продолжали получать личные инструкции по математике и чтению. В прошлом году половина алфавита пришла утром, а половина — днем. Для каждого класса был назначен специальный учитель, который помогал ученикам, которые могли посещать школу только удаленно.
Со стороны можно легко предположить, что у такого богатого округа, как его, будет относительно немного проблем и что у каждого студента будут все необходимые ресурсы, но это заблуждение, говорит он.«В каждом округе есть учащиеся на нижнем уровне социально-экономической лестницы, и у них есть потребности. Когда дело доходит до социальных и эмоциональных потребностей, которые охватывают весь спектр, вне зависимости от того, высоко вы или низко по этой лестнице ».
Летом в главном здании района проводились социальные мероприятия на открытом воздухе, чтобы начать переход к личному обучению и развитию сообщества. Средства ESSER были использованы для предоставления сотням школьников K-12 возможностей обучения, которые у них были заимствованы за счет дистанционного обучения.На недельных сессиях обсуждались самые разные темы: от творческого письма, инсценировок и судебной антропологии до восстановления кредита и помощи в подаче заявления в колледж.
Эти занятия не были предназначены для восстановления пропущенных знаний, говорит Хэдли. «Это был большой успех, потому что дети получили опыт, которого они упустили; конечно, происходило обучение, но основное внимание уделялось опыту ».
Хэдли имеет обыкновение обедать с вернувшимися учениками, чтобы узнать их точку зрения.Большинство из них предпочло бы, чтобы сообщество более чутко относилось к учителям и администраторам, обеспечивающим выполнение предписаний общественного здравоохранения. «Если они вернутся в школу, они не против».
Рост населения американцев школьного возраста произошел в основном в пригородах. (Исследовательский центр Pew)
Инвестиции в повышение квалификации
Центральный округ Арлингтона, расположенный в 75 милях к северу от Нью-Йорка, обслуживает около 8000 студентов.По данным Департамента образования штата Нью-Йорк, меньшинства составляют почти 30 процентов студентов. Как и в случае с округом Батлер, студенты происходят из пригородных, сельских и городских сообществ.
Дэйв Мойер, который стал суперинтендантом округа в январе 2021 года, остановился на стратегическом использовании средств от COVID-19. Вместо того, чтобы покупать людей или покупать программы, он вкладывает средства в профессиональное развитие на рабочем месте. Цель состоит в том, чтобы укрепить потенциал его сотрудников для предоставления высококачественного образования в эпоху быстрых изменений и непредсказуемости.
«Мы пытаемся создать системный подход для поддержки персонализированного обучения для всех ваших учеников, который будет устойчивым в долгосрочной перспективе», — говорит он. «Это [COVID-19] — текущее изменение, внесенное в нашу систему, но через четыре или пять лет в него могут быть внесены другие изменения — способны ли мы справиться с этим и удовлетворить потребности наших детей? ”
По словам Мойера, Арлингтон не ставил школьные технологии своим приоритетом до начала пандемии.Когда это произошло, округ закупил Chromebook для студентов, но не был готов эффективно использовать их. В настоящее время усилия по развитию персонала сосредоточены не на самих устройствах, а на уникальных способах использования технологий для персонализации обучения.
«Мы не сможем преодолеть то, что мы испытали за последние пару лет, за шесть месяцев или год», — говорит Мойер. «Мы должны изменить то, что мы делаем в долгосрочной перспективе; некоторые люди надеются, что они смогут просто вернуться к тому, как было всегда, когда бы это ни проходило, и мы просто не думаем, что это вариант.
В качестве дополнительного инструмента для осуществления этой трансформации округ использует модель обучения 2025 года AASA в качестве организационной основы. Обучение 2025 г. требует к 2025 г. реорганизации государственной системы образования с упором на образование, ориентированное на учащихся и равное.
Попутно Мойер и его сотрудники исследуют социальные последствия и последствия для развития молодых людей, отключенных от школ. В частности, самые молодые ученики упускают возможность узнать о нормах взаимодействия в условиях школы.
«Это вызов — снова создать такую среду, в которой все взаимодействуют и работают вместе, преодолевая разногласия и понимая, почему мы здесь и что пытаемся сделать», — говорит Мойер.
Этот процесс выходит за рамки самой школы и включает в себя информирование населения об изменениях, которые внедряет округ, о том, как они могут изменить внешний вид школ, чем школы, о которых помнят родители, и о том, как новый подход округа может лучше подготовить учащихся к успеху после их окончания. .
(Питер Акерман / TNS)
Последний камень преткновения
В общинах, где уровень вакцинации высок, а уровень инфицирования низкий, дети снова ходят в школу, и дела обстоят почти нормально, говорит Дэн Доменек из AASA. «Камнем преткновения сейчас является нежелание людей носить маски и проходить вакцинацию.В конце концов мы преодолеем это, и как только мы это сделаем, у нас появится энергия для изменения структуры образования — мы должны признать, что наша образовательная система устарела и уж точно не соответствует требованиям 21 века ».
Джоанна Ванатта — суперинтендант школьного округа Чартьерс-Вэлли, пригородного района к юго-западу от Питтсбурга. Она видела, как во время пандемии учащиеся росли, узнав, как перестать писать текстовые сообщения и составлять электронные письма, которые действительно общались, и развили новые способности для решения проблем.
«Это уроки жизни и жизненные навыки, которые они запомнят», — говорит она.«На самом деле я очень рад творческому обучению и решению проблем, которое ждет это поколение».
«Пандемия привела к новому уровню безотлагательности решения проблем в образовании, которые существовали долгое время», — говорит Дэйв Мойер. Людям могут нравиться бинарные решения типа «да-нет», но их недостаточно для решения сложных проблем 21 века.
«Нам придется выстоять в огне и привести нашу систему и наших людей в такое место, где они смогут гарантировать, что наши дети будут готовы к успеху в жизни, когда они покинут наши программы K-12.”
Установите настроение сезона с этой распродажей круглой лампой RGB
Цена и доступность предложения могут быть изменены после публикации.
TL; DR: Этот настенный светильник RGB Eclipse Circle поступит в продажу с 22 октября по цене 89,99 долларов США — это экономия 9%.
Это официальная пора праздников. В этом месяце мы начинаем с Хэллоуина, но веселье продолжается до Нового года.Это требует смены декора каждые пару недель. Облегчите себе жизнь, выбрав эту минималистичную RGB-лампу, которая предлагает максимум функций, которые помогут вам настроить атмосферу на весь сезон.
Около 15 дюймов по периметру настенный светильник RGB Eclipse Circle сохраняет низкий профиль у любой стены в вашем доме. Вы даже не заметите его, когда его нет. Но когда вы щелкаете выключателем, вся ваша комната оживает. Вы можете переключаться между более чем 16 миллионами цветовых вариантов, от однотонных до разноцветных очков.Есть также более 350 световых эффектов, таких как мигание и пульсация, когда вы чувствуете особую ажиотаж. Вы можете создать жуткую сцену со стробирующими зелеными огнями на Хэллоуин, сделать обстановку мягкой и спокойной в канун Рождества с помощью теплого красного оттенка или оживить вечеринку в канун Нового года с помощью цирка света.
Конечно, эта лампа предназначена не только для праздников. Он также предлагает множество вариантов освещения для повседневной жизни. Осветите свое рабочее пространство для продуктивности и сосредоточенности. Добавьте веселых красок в свое игровое пространство.Наслаждайтесь естественным освещением в ночь кино. Варианты кажутся бесконечными, учитывая, что вы можете переключаться между 16 миллионами цветов. Лампа также регулируется по яркости, поддерживает несколько цветовых температур и прослужит до 30 000 часов. Вы даже можете взять две или более лампы и соединить их все вместе с помощью одного пульта дистанционного управления.
Эти минималистичные лампы с максимальными характеристиками обычно стоят 99 долларов за штуку, но в течение ограниченного времени вы можете купить одну из них на распродаже за 89,99 долларов и наслаждаться ею до праздников и не только.
Предоставлено: Lamp Depot.
WS2812 1/3/8/12/16 / 24X5050 RGB Pixel Maker LED LED со встроенными драйверами [NPR-WS2812-RGBX1]
SuperLightingLED.com гордится своим качеством; Мы гарантируем наши светодиодные фонари и 24 месяца гарантии, любые проблемы с качеством, бесплатная замена отправлена.
Мы используем только лучшие комплектующие во всех наших осветительных решениях, работая с заводами, которые имеют сертификаты ROHS и CE. У нас есть строгий контроль качества, все светодиодные фонари проверены на возраст и проходят как минимум 2 проверки качества, прежде чем они будут выпущены.
На рынке есть много светодиодных фонарей, которые не соответствуют этим стандартам, но мы гарантируем, что все светодиодные фонари, продаваемые SuperLightingLED.com, рассчитаны на такой же долгий срок службы, как и светодиодные лампы.
2. Что такое светодиод?
Светоизлучающий диод (LED) — это устройство, состоящее из полупроводника, который излучает световую энергию, когда через него проходит электрический ток. Светодиоды можно использовать в широком спектре осветительных приборов. Прогнозируется, что светодиодные фонари — это будущее энергоэффективного домашнего освещения.
3. Как долго служат светодиодные фонари?
Светодиодные фонари имеют гораздо более длительный срок службы по сравнению со стандартными галогенными светодиодными лампами. Фактически светодиодные фонари служат до 50000 часов — это более 5 лет непрерывной работы! Когда вы устанавливаете новые светодиодные фонари, возможно, вам больше никогда не придется заменять светодиодные фонари.
4. Обеспечивают ли светодиодные светильники высококачественное освещение?
Короткий ответ — ДА! Мы гордимся качеством и светоотдачей всех наших светодиодных фонарей, просто выбирая между теплым или холодным белым.Вы точно не будете разочарованы качеством освещения!
5. Рентабельны ли светодиодные фонари?
Светодиодные фонари Светодиодные фонари обладают высокой энергоэффективностью, что приводит к значительной экономии электроэнергии в течение срока службы лампы. Затраты на электроэнергию растут. Средний счет на домашнее освещение в Великобритании составляет около 300 фунтов стерлингов в год. Замените существующие галогенные светодиодные лампы на светодиодные, и вы сможете сократить расходы на освещение до 90%. Это средняя экономия более 270 фунтов стерлингов в год!
6.Зачем мне нужен трансформатор, совместимый со светодиодами?
Вам может понадобиться только трансформатор, если вы покупаете светодиодные лампы 12 В, все 240 светодиодных ламп не требуют трансформатора, светодиодные лампы 12 В — MR16, G4 и MR11.
Стандартные электронные трансформаторы могут вызвать мерцание светодиодных ламп определенных типов, что приведет к необратимому долгосрочному повреждению самой светодиодной лампы. Эта проблема наиболее очевидна в светодиодных лампах MR16 12 В, где стандартный трансформатор не обеспечивает плавного протекания тока, вызывая проблемы с мерцанием.Чтобы избежать повреждения ваших новых светодиодных фонарей, всегда лучше использовать драйверы / трансформаторы светодиодов.
7. Можно ли использовать светодиодные лампы с диммерами?
Да. Некоторые типы светодиодных фонарей регулируются.
8. В чем заключаются преимущества светодиодного освещения?
Короче говоря, светодиодные светильники — это будущее домашнего и офисного освещения с рядом замечательных функций, в том числе:
9.Мой диммер не работает с моими светодиодными лампами?
Ваши светодиодные фонари Светодиодные фонари не могут регулироваться яркостью. Не все светодиодные фонари Светодиодные фонари имеют возможность затемнения, поэтому вы должны убедиться, что ваши светодиодные фонари являются регулируемыми.
Убедитесь, что у вас есть диммерный переключатель, совместимый со светодиодами. Стандартные бытовые диммерные переключатели не работают со светодиодной подсветкой. Светодиодные фонари с регулируемой яркостью будут эффективно работать только с переключателем светорегулятора.
10. Что такое SMD?
SMD или поверхностные диоды — это новое поколение светодиодного освещения.Большинство наших светодиодных фонарей содержат SMD, которые в три раза ярче, чем старые светодиоды, и доступны в теплом и холодном белом цвете. Светодиодные лампы с SMD излучают высококачественный свет того же цвета, что и обычные домашние светодиодные лампы.
11. Каковы преимущества использования светодиодного освещения?
Светодиодные лампы Светодиодные фонари имеют много преимуществ по сравнению со стандартными галогенными лампами или лампами накаливания, в том числе:
Чрезвычайно энергоэффективное — 80% потребляемой электроэнергии преобразуется в световую энергию
Самое экологичное решение для освещения
Огромное сокращение на ваши счета за электроэнергию
Срок службы намного больше, чем у галогенных светодиодных ламп
Работа при низких температурах
Направленный свет
Низкопрофильный и компактный размер
Устойчивость к поломке и вибрации
На срок службы не влияет быстрое переключение
Мгновенное включение с нет времени прогрева
нет инфракрасного или УФ излучения
12.Мои светодиодные фонари не включаются?
Это могло произойти по разным причинам. Чтобы определить, получили ли вы неисправные лампы:
Пожалуйста, убедитесь, что свет получает питание от переключателя / регулятора освещенности
Пожалуйста, проверьте, надежно ли светодиодные фонари вставлены в фитинг
Пожалуйста, разместите светодиодные фонари в альтернативный вариант в той же схеме
13. Подойдут ли светодиодные лампы к моим старым осветительным приборам?
Да.Все наши светодиодные фонари идеально подходят для замены ваших старых галогенов, если иное не указано в описании продукта.
14. Нужно ли мне заменять фурнитуру для использования светодиодного освещения?
Нет. Большинство наших светодиодных фонарей предназначены для модернизации. Это означает, что светодиодные светильники Светодиодные лампы подходят для существующих осветительных приборов. Перед покупкой проверьте информацию о наших продуктах на выбранной вами лампе.
15.Какой цвет лучше всего подходит для использования в помещении?
Выбор цвета зависит от личных предпочтений. Самый популярный цвет для внутреннего светодиодного освещения — теплый белый, так как он наиболее близок к цвету, излучаемому традиционными галогенными прожекторами. Наши светодиодные фонари излучают высококачественный свет того же цвета, что и обычные домашние светодиодные фонари.
16. Какой цвет лучше всего подходит для использования вне помещений?
Выбор цвета зависит от личных предпочтений.Самый популярный цвет для внутреннего светодиодного освещения — холодный белый, так как он дает четкий яркий свет, который идеально подходит для освещения открытых пространств.
17. Могу ли я использовать светодиоды в цепи 12 В?
Да.
18. Что лучше для светодиодных фонарей, цепи низкого напряжения или сети?
Они оба так же хороши.
19. Как я могу максимально сэкономить на счете за электроэнергию?
Лучший способ максимизировать экономию на счетах за электроэнергию — это установить светодиодные фонари по всему дому и / или офису.Замена традиционных форм галогенного освещения и освещения лампами накаливания на светодиодные может сократить расходы на освещение до 90%.
20. Зачем мне менять диммер?
Минимальная мощность диммерного переключателя слишком высока, как правило, большинство диммерных переключателей имеют мощность 60 Вт, что слишком много для работы со светодиодными лампами с регулируемой яркостью. Вот почему вам нужен диммерный переключатель, совместимый со светодиодами, для использования со светодиодными лампами с регулируемой яркостью.
21. Какая фурнитура должна быть установлена в моей ванной комнате?
Любая арматура, устанавливаемая в ванной / влажной / душевой, должна быть не только огнестойкой, но также водонепроницаемой и иметь соответствующий сертификат IP65 или выше, чтобы соответствовать строительным нормам для ванных комнат.
22. Что означает IP65?
Степень защиты IP или степени защиты от проникновения электрического продукта — это ориентир, который используется для определения прочности корпуса, окружающего электрические компоненты.
В случае светодиодных фонарей Светодиодный светильник IP-рейтинг измеряет устойчивость к воздействию частиц пыли и уровень защиты от воды или жидкостей. IP65 означает, что светодиодная лампа полностью защищена от пыли и может выдерживать струи воды под низким давлением со всех сторон — с приемлемым ограниченным проникновением.
23. Что означает IP67?
Степень защиты IP или степени защиты от проникновения электрического продукта — это ориентир, который используется для определения прочности корпуса, окружающего электрические компоненты.
В случае светодиодных фонарей Светодиодный светильник IP-рейтинг измеряет устойчивость к воздействию частиц пыли и уровень защиты от воды или жидкостей. IP67 означает, что светодиодная лампа полностью защищена от пыли и от погружения в воду на глубину 6-39 дюймов.
24. Обязательно ли иметь огнестойкую арматуру?
Потолки являются важным барьером, который помогает предотвратить распространение огня и шума между этажами здания.Установка встраиваемых даунлайтов пробивает этот барьер и может снизить эффективность этого барьера безопасности.
Установка потолочных светильников с огнестойкостью помогает защитить ваше помещение от воздействия огня и шума, а также способствует соблюдению новых строительных норм, регулирующих установку даунлайтов. Сделанные из вспучивающихся материалов, даунлайты с классом огнестойкости герметизируют зазор между потолком и арматурой, обеспечивая до 90 минут защиты от распространения огня в пустые пространства на потолке / чердаке.Даунлайты с огнестойкостью дороже, чем даунлайты без огнестойкости. Однако худшее решение, которое вы можете принять, — это покупать более дешевые модели, которые выглядят точно так же, только для того, чтобы узнать от электрика, устанавливающего их, что строительные нормы требуют для этой ситуации точечные светильники с огнестойкостью.
25. Насколько сильно нагреваются светодиодные лампы?
Светодиодные лампы работают значительно холоднее, чем другие типы освещения, такие как галогенные или КЛЛ, но они действительно нагреваются, но тепло рассеивается металлическими радиаторами, которые отводят тепло от самого источника света.Хранение их в прохладном состоянии помогает продлить срок службы светодиодных фонарей.
26. В чем разница между теплым белым, чистым белым и холодным белым?
При выборе белого светодиодного освещения вы можете подумать, что это будет очень простой выбор, поскольку есть только один вариант… белый? Неправильный; на самом деле есть разные оттенки белого на выбор. Три основных оттенка белого цвета: теплый белый (также известный как мягкий белый) — теплый белый не означает, что он теплый на ощупь, теплый — это оттенок белого, в котором загорается светодиод.Теплый белый цвет имеет тенденцию быть слегка желто-коричневым, как и ваши стандартные галогенные лампы. Теплый белый цвет обычно создает ощущение тепла и домашнего уюта. Технические характеристики теплого белого: от 2700k до 3200k (ниже — теплее). Pure White (также известный как дневной белый, коммерческий белый, ярко-белый) — это наиболее близкое сходство с дневным белым, он, как правило, не имеет желтого ( теплый) или голубой (холодный) оттенок к нему. Это используется в коммерческих приложениях, а также для выделения областей; он обычно ярче, чем теплый белый.По шкале Кельвина чистый белый будет иметь значение от 4500k до 6000k (ниже — теплее). Холодный белый — этот белый цвет используется меньше всего из трех, поскольку он обычно слишком «холодный» (синий оттенок) для коммерческого и общего использования. Однако это самый яркий белый цвет, и его можно использовать для выделения областей. Он по-прежнему выглядит очень белым, а синий оттенок очень слабый. Это замечательно для создания ощущения прохлады и свежести. По шкале Кельвина это будет 6500 тыс. +;
27. Почему светодиодные фонари считаются зеленой технологией?
Светодиодные фонари — единственное действительно экологичное решение для освещения.В отличие от традиционных форм освещения, где большая часть электроэнергии выделяется в виде тепла, светодиодные фонари работают с эффективностью около 80%. Это означает, что светодиодные лампы преобразуют 80% своего электричества в световую энергию с очень небольшим количеством тепла, по сравнению с лампой накаливания, которая превращает только 20% используемого электричества в световую энергию.
28. Какой драйвер мне понадобится?
Определить, какой трансформатор вам нужен, довольно просто.Вы берете количество светодиодной ленты, которое у вас есть, в метрах, и умножаете это на мощность светодиодной ленты, которая у вас есть, снова на метр. Например, 7 м светодиодной ленты 4,8 Вт: 7 x 4,8 Вт = 33,6 Вт. Следовательно, вам потребуется трансформатор на 60 Вт.
29. Можно ли затемнить белую светодиодную ленту?
Светодиодная лента может регулироваться яркостью различными способами. 1 вариант с нашими диммируемыми трансформаторами: они доступны в вариантах 12 В / 24 В, 30 Вт и 100 Вт. Затем они могут быть затемнены с помощью стандартного настенного диммера Triac (стандарт в домашних условиях).У нас также есть приемники с регулируемой яркостью симистора; они проходят между трансформатором и светодиодной лентой. Они работают как с версиями на 12 В, так и на 24 В и идеально подходят для более крупных проектов, в которых используются более мощные трансформаторы, такие как 320 Вт. Другой вариант — наши приемники 0–10 В, они могут использоваться как для версий на 12 В, так и на 24 В. Они проходят между трансформатором и светодиодной лентой и могут быть подключены к таким системам, как Lutron. У нас также есть возможность затемнения через DMX. У нас есть приемники DMX для работы с пультами и системами DMX, чтобы вы могли при необходимости полностью регулировать яркость.Опять же, они проходят между трансформаторами и светодиодной лентой и могут быть соединены вместе для одновременного затемнения всех приемников.
30. Как температура окружающей среды влияет на работу светодиодных фонарей?
На характеристики светодиодных фонарей могут отрицательно повлиять резкие изменения температуры окружающей среды или работа светодиодных фонарей за пределами рекомендуемого диапазона температур. Светодиодные фонари проходят испытания при температуре окружающей среды 25 градусов Цельсия, что подходит для большинства домашних условий.
Однако в более сложных условиях, с экстремальными уровнями жарких или холодных условий окружающей среды, может наблюдаться снижение уровня освещенности вместе с неблагоприятным влиянием на срок службы лампы. Вот почему существуют специально разработанные светодиодные фонари для использования в опасных и экстремальных условиях.
31. Как часто мне нужно будет заменять светодиодные фонари?
Светодиодные фонари имеют срок службы более 50000 часов непрерывной работы.Это означает, что если вы замените существующие галогенные светодиодные фонари на новые / новые, возможно, вам больше никогда не придется заменять светодиодные фонари!
32. Сколько длится 50000 часов?
Светодиодные светильники имеют срок эксплуатации более 50000 часов, что соответствует:
5,7 лет (24 часа в день)
7,4 года (18 часов в день)
11,4 года (12 часов в день)
17,1 года (8 часов в день)
33.Как подключить светодиодную ленту?
Для этого типа светодиодной ленты вам понадобится только трансформатор, чтобы заставить ее работать. Вы подключаете двухжильный пусковой провод, выходящий с одного конца. Затем он подключается к трансформатору, красный провод подключается к +, а черный провод подключается к -. Двухжильные кабели можно удлинить по мере необходимости, чтобы можно было установить трансформатор на нужное расстояние.
34. Содержат ли внутри светодиодные лампы какие-либо токсичные материалы?
№Светодиодные лампы относятся к технологии твердотельного освещения и не содержат каких-либо вредных материалов, в отличие от некоторых других типов домашнего освещения, которые содержат токсичные вещества, такие как ртуть.
35. Какая мощность мне нужна?
Выбор требуемой мощности зависит от того, в каком приложении вы устанавливаете светодиодную ленту. 5 Вт и 10 Вт идеально подходят для использования в качестве основного освещения. Освещение для выделения участков в качестве вторичного освещения.Идеально подходит для навесов, вывесок с ниспадающими потолками и т. Д. Для создания эффекта гладкого ореола. Для этих приложений мощность 10 Вт будет предпочтительнее, чем 5 Вт, если имеется большое количество окружающего освещения. Светильники мощностью 15 и 20 Вт идеально подходят для использования в качестве общего освещения или в качестве основного освещения для площадей, превышающих размеры навесов и т. Д. Например, мытье передних планок / задних решеток / под освещением кухонного шкафа в качестве «рабочего света»
36. Сделайте это. Светодиодное освещение Светодиодное освещение включается сразу или его нужно прогреть?
Светодиодные индикаторы горят мгновенно, что означает, что им не требуется время для разогрева.Кроме того, светодиодные фонари не испускают потенциально вредных инфракрасных или ультрафиолетовых излучений.
37. Снижается ли уровень излучаемого света в течение срока службы светодиодных фонарей?
Да. Уровень освещения действительно уменьшается в течение срока службы светодиодных фонарей. Однако из-за их чрезвычайно длительного жизненного цикла это практически незаметно.
38. Когда мне нужно использовать термоусадочную пленку IP67?
IP67 Термоусаживаемый тип требуется в областях, где требуется водонепроницаемость.Например, ванные комнаты, кухни и экстерьер. Термоусадочная версия водонепроницаема, но ее нельзя погружать, например, в пруд. Термоусадочная пленка IP67 — это защитное покрытие над светодиодной лентой, которое позволяет легко протирать, чистить и т. Д.
39. Верно ли, что светодиодные лампы энергоэффективны?
Да. Светодиодные лампы работают с КПД около 80%, по сравнению с лампой накаливания, КПД которой составляет всего 20%. Это означает, что светодиодные фонари преобразуют 80% своей электроэнергии в световую энергию.Светодиодные фонари — единственное действительно экологичное решение для освещения.
40. Как создать нестандартную длину? Могу я разрезать ленту?
Все светодиодные ленты режутся. Каждую из них можно разрезать в разных точках: 50 мм, 100 мм, 150 мм или 200 мм, в зависимости от имеющейся у вас версии мощности. Мы можем либо отрезать нужную длину, если требуется, либо вы можете сделать это сами. После того, как вы отрежете до нужной длины, чтобы присоединить его к трансформатору или другой детали, вам понадобится паять, а если нет, мы также поставляем 2 типа зажимов.Один из типов — это зажим стартового провода, который присоединяется к обрезку и имеет кабель, выходящий из него. Другой зажим представляет собой «зажим с лентой на ленту», этот зажим соединяет 2 части вместе.
Экономьте деньги, создавая собственное кольцо светодиодов RGB
NeoPixels — отличные маленькие светодиоды RGB, которые можно использовать практически с любым микроконтроллером, что позволяет добавлять цвет в любое количество проектов для этого дополнительного чутья. Понятно, что все, что связано с RGB-светодиодами, стало популярным после их выпуска, и кольца NeoPixel не исключение.NeoPixels — это версия WS2812 RGB LED от Adafruit, только они немного дороже, особенно в форме кольца, и в результате Hyper_Ion подробно описал, как создать собственное кольцо NeoPixel Ring.
Специальное (нелегальное) кольцо NeoPixel от Hyper_Ion было разработано, чтобы сэкономить ваши деньги по сравнению с предложением Adafruit. (📷: Hyper_Ion)
Учебное пособие в равной степени представляет собой проектирование печатной платы и пайку светодиодов для поверхностного монтажа — трудная работа, если вы никогда не делали этого раньше. Форма NeoPixel Ring создается с использованием координат для создания радиуса, а также размещения светодиодов, что выполняется с помощью программного обеспечения САПР, такого как DipTrace, ExpressPCB или EaglePCB.Hyper_Ion предоставляет удобный лист Excel, который поможет скоординировать установку, если вы хотите, чтобы он соответствовал его дизайну.
Следующий шаг включает в себя разводку соединений между светодиодами путем создания потока данных ввода / вывода на монтажной площадке с контактами, указывающими на размещение светодиода. Затем выполняется разводка питания и заземления и осуществляется с помощью кругов и полукругов, которые образуют перемычку на печатной плате между светодиодами.
Комбинирование этой платы с другим продуктом NeoPixel возможно путем подключения контактов питания / заземления к контактам подходящего микроконтроллера.Подключение последнего вывода (данных) к любому цифровому выводу также помогает учесть изменения, сделанные тем, кто их собирает. Загрузка библиотеки NeoPixel, установка количества светодиодов, выбранный цифровой вывод и программирование анимации делают все возможное, чтобы создать свою версию NeoPixel Ring.
Hyper_Ion протравил свою печатную плату методом переноса тонера, используя PressN’Peel и дешевый лазерный принтер. (📷: Hyper_Ion)
Очевидно, что создание этого светодиодного кольца — это еще кое-что, включая травление печатной платы, пайку с трафаретом и без него, формирование платы и многое другое, достаточно информации, чтобы заполнить учебное пособие.