360 видео | VR контент
Сортировать: по умолчаниюпо датепо странепо просмотрам
просмотры: 0
Полет над Майами, СШАпросмотры: 1,085
Тадж-Махал, Индияпросмотры: 2,007
Подводная жизнь, Марса Алам, Египетпросмотры: 2,076
Национальный парк Лосиный остров, Москвапросмотры: 2,605
Котор, Черногорияпросмотры: 4,183
Сахалинпросмотры: 7,093
Дайвинг с китовой акулойпросмотры: 5,039
Будва, Старый город, Черногорияпросмотры: 4,272
Природа Армениипросмотры: 10,032
Кейптаун, ЮАРпросмотры: 7,118
Маковое поле, Армения. Умиротворяющее 360 видео
Умиротворяющее 360 видео
просмотры: 8,893
Полет над Чикаго, США просмотры: 8,202 Пераст, Боко-Которский залив, Черногорияпросмотры: 7,769
Мехико, вертолетная экскурсияпросмотры: 14,211
Мир кораллов. Подводное видеопросмотры: 26,174
Сан-Франциско, СШАпросмотры: 3,277
Озеро Байкал, Россияпросмотры: 10,848
Оаху и Кауаи, Гавайи.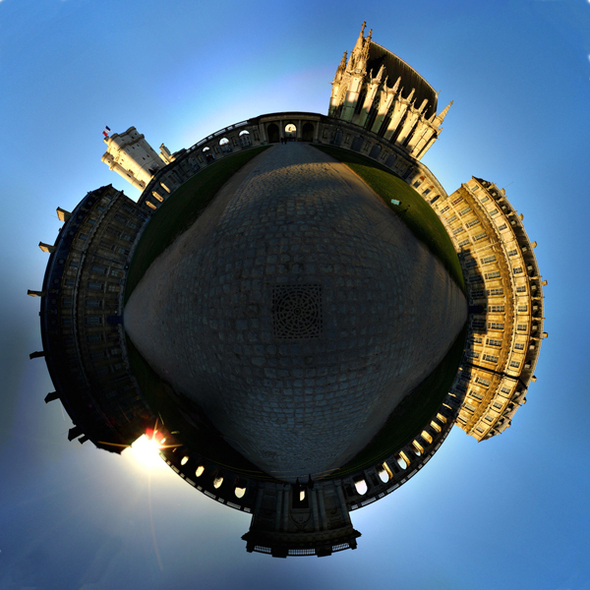
просмотры: 20,915
Северное сияние в Исландии. 360 видео в 12Кпросмотры: 8,506
Времена года. Умиротворяющее 360 видеопросмотры: 10,418
Путешествие в зимнюю Лапландию, Финляндияпросмотры: 13,826
Путешествие к Северному полюсупросмотры: 14,449
Остров Закинтос, Грецияпросмотры: 28,176
Объединенные Арабские Эмираты просмотры: 12,863 Сквозь туман и облакапросмотры: 20,229
Мадьдивыпросмотры: 18,797
Путешествие к водопаду Анхель, Венесуэлапросмотры: 15,428
Озеро Севан, монастырь Севанаванк. Армения
Армения
просмотры: 32,795
Лос-Анджелес, СШАпросмотры: 22,471
Свадьба на вершине вулкана. Камчаткапросмотры: 16,816
Времена года. Весенний лес. Релакспросмотры: 37,284
Северное сияние на Кольском полуостровепросмотры: 15,734
Времена года. Зима. Релакс полетпросмотры: 18,839
Времена года. Лето. Релакс полет
Лето. Релакс полет
просмотры: 32,283
Лас-Вегас, США просмотры: 16,462 Времена года. Осень. Релакс полетпросмотры: 23,531
Кижи зимой. Карелия, Россияпросмотры: 38,857
Антарктида. Релакс видеопросмотры: 27,140
Вокруг света. Лучшее. 8Кпросмотры: 45,590
Фрирайд. Горно-спортивная база Снежная Долина, Камчаткапросмотры: 25,908
Казань, Россияпросмотры: 115,605
Водопад Виктория, Замбия-Зимбабве.
просмотры: 27,992
Лаутербруннен. Долина водопадов и горных вершин. Швейцарияпросмотры: 35,132
Музей-заповедник «Кижи», Карелия, Россияпросмотры: 36,822
Санкт-Петербург, Россияпросмотры: 21,779
Восточное побережье Камчатского полуострова. Берингово морепросмотры: 22,786
Чарские пески, Забайкальский край, Россия просмотры: 31,512 Церматт, Маттерхорн, Швейцарияпросмотры: 34,485
Горы Хуаншань, Китай. Тизер
Тизер
просмотры: 31,279
Цюрих, Швейцарияпросмотры: 21,641
Брянский лес туманным утром. Россияпросмотры: 43,556
Дайвинг с ларгой. Японское море, Россияпросмотры: 25,232
Рио-де-Жанейро. Городские пейзажи. Бразилияпросмотры: 62,921
Кормление акул. Багамыпросмотры: 28,026
Пляжи Рио-де-Жанейро. Бразилия
Бразилия
просмотры: 26,275
Весна в Москвепросмотры: 22,663
Шоурил 2020просмотры: 68,255
Статуя Христа-Искупителя, Рио-де-Жанейро, Бразилия просмотры: 37,507 Зимняя сказка. Лапландия, Финляндияпросмотры: 64,896
Древний город Петра, Иорданияпросмотры: 169,928
Ночной Токио, Японияпросмотры: 82,674
Замок Нойшванштайн и церковь Св. Коломана, Германия
Коломана, Германия
просмотры: 51,724
Полет на параплане. Роза Хутор, Сочипросмотры: 36,923
Площадка для тестирования роботов. Фукусима, Японияпросмотры: 40,491
Маттерхорн, Швейцарияпросмотры: 27,262
Снежная Долина. Фрирайд на Камчаткепросмотры: 40,016
Горнолыжный курорт Роза Хутор. Южный склон. Сочипросмотры: 40,564
Горнолыжный курорт Роза Хутор. Южный склон. Сочи
Южный склон. Сочи
просмотры: 41,731
Королевство Бутанпросмотры: 27,406
Кроноцкое озеро. Крупнейшее озеро Камчаткипросмотры: 59,620
Млечный путь над Сахаройпросмотры: 74,769
Пустыня Сахара, Алжирпросмотры: 34,149
Геопарк Бингоу Данься, Китайпросмотры: 56,716
Водопад Дэтянь, Китай-Вьетнампросмотры: 43,601
Горы Гуйлинь, Китайпросмотры: 35,344
Путешествие на Карибыпросмотры: 29,835
Горный Алтайпросмотры: 57,993
Гонконгпросмотры: 25,210
Национальный геопарк Ярданг в Дуньхуане, Китайпросмотры: 44,218
Кормление акул. Лагуна Бека, Фиджи
Лагуна Бека, Фиджи
просмотры: 31,353
Рисовые поля Юньнань, Китайпросмотры: 26,560
Антарктическая биенналепросмотры: 58,772
Индейцы Варао. Дельта реки Ориноко, Венесуэлапросмотры: 60,208
Дайвинг у архипелага Сады Королевы, Кубапросмотры: 36,346
Соловецкие островапросмотры: 64,657
Майами-Бич, Флорида, СШАпросмотры: 33,555
Кроноцкий заповедник, Камчатка, Россияпросмотры: 46,626
Новогодняя Москва 2018просмотры: 34,427
Ингушские башни, Россияпросмотры: 36,647
Куршская коса, Россия-Литвапросмотры: 73,036
Стеклянный мост Чжанцзяцзе, Китайпросмотры: 55,938
Животный мир Галапагосских островов. Эквадор
Эквадор
просмотры: 54,125
Дайвинг с мантами, Раджа-Ампат, Индонезияпросмотры: 31,855
Долина гейзеров, Камчаткапросмотры: 39,326
Цветные горы Чжанъе Данься, Китайпросмотры: 39,815
Гренландия. Остров Айсберговпросмотры: 46,072
Водопад Анхель миллионы лет назадпросмотры: 60,687
Нью-Йорк, США. Город небоскребовпросмотры: 97,066
Перекресток Сибуя. Токио, Япония
Токио, Япония
просмотры: 81,750
Байкал. Волшебный ледпросмотры: 64,348
Великая Китайская стена. Цзянькоу и Цзяошань. Часть 1просмотры: 55,703
Залив медуз, Раджа-Ампат, Индонезияпросмотры: 47,499
Пустыня Вади-Рам, Иорданияпросмотры: 73,383
Национальный парк Чжанцзяцзе (горы Аватар), Китайпросмотры: 41,975
Лед Байкала. Таймлапспросмотры: 84,105
Ночной Шанхай, Китайпросмотры: 41,582
Пустыня Вади-Рам, Иордания. Тизер
Тизер
просмотры: 44,840
Эльбрус, Россия. Часть 2просмотры: 41,600
Кальдера вулкана Узон, Камчаткапросмотры: 51,056
Среди тысячи рыб. Дайвинг с каранксамипросмотры: 107,827
Голландия — страна тюльпановпросмотры: 51,420
Национальный парк Плитвицкие озера зимой, Хорватияпросмотры: 51,532
Кладбище кораблей в лагуне Трук, Микронезияпросмотры: 55,346
Дайвинг с черепахой, скатом и медузойпросмотры: 59,483
Плато Путорана, Россияпросмотры: 37,418
Кальдера Узон, Камчатка. Часть 1
Часть 1
просмотры: 46,887
Эльбрус, Россия. Часть 1просмотры: 49,305
Новогодняя Москвапросмотры: 52,213
Национальный парк Плитвицкие озера зимой, Хорватия. Тизерпросмотры: 49,188
В гости к медведям в Кроноцкий заповедникпросмотры: 77,220
Дайвинг с белой акулойпросмотры: 53,699
Медведи Камчатки. Река Камбальнаяпросмотры: 481,769
Извержение вулкана Плоский Толбачик, Камчаткапросмотры: 61,467
Дайвинг с черепахойпросмотры: 80,616
Дайвинг с акуламипросмотры: 55,899
Дайвинг с медузойпросмотры: 74,106
Заповедник изучения и разведения больших панд в Чэнду, Китайпросмотры: 58,119
Фестиваль воздухоплавания «Золотое кольцо России»просмотры: 65,687
Солнечное затмение на острове Тидорепросмотры: 45,386
Цветение яблоневых садов. Москва, Коломенское
Москва, Коломенское
просмотры: 60,389
Лагуна Канайма, Венесуэла. Часть 2. Водопад Ачапросмотры: 69,784
Рейне, Лофотенские острова, Норвегияпросмотры: 55,560
Салют в Москве 9 Мая 2017просмотры: 55,522
Российская пилотажная группа Беркутыпросмотры: 53,747
Лагуна Канайма, Венесуэла. Часть 1. Водопад Укаймапросмотры: 61,138
Брайс-Каньон, США. Часть 2просмотры: 67,444
Храм Спаса на Крови, Санкт-Петербург, Россияпросмотры: 62,580
Зима в центре Москвыпросмотры: 98,015
Водопад Анхель, Венесуэлапросмотры: 50,294
На реке Камбальная. Часть 4
Часть 4
просмотры: 63,887
Ночной Санкт-Петербург, Россияпросмотры: 81,879
Северное сияние в Норвегиипросмотры: 61,572
Фестиваль воздухоплавания «Золотое кольцо России». Часть 1просмотры: 60,018
Петропавловская крепость, Санкт-Петербург, Россияпросмотры: 71,920
Водопад Анхель, Венесуэла. Часть 1просмотры: 46,452
Айсберги Гренландии. Часть 6просмотры: 55,943
Монблан, Италия-Франция. Часть 4
Часть 4
просмотры: 53,917
Монблан, Италия-Франция. Часть 3просмотры: 60,969
Монблан, Италия-Франция. Часть 2просмотры: 54,374
Бутан. Часть 1просмотры: 94,612
Водопад Виктория, Замбия-Зимбабве. Часть 2просмотры: 65,456
Шильонский замок, Швейцарияпросмотры: 87,361
Венецианский карнавалпросмотры: 54,847
Айсберги Гренландии. Часть 5
Часть 5
просмотры: 63,280
Берн, Швейцарияпросмотры: 72,192
Монблан, Италия-Франция. Часть 1просмотры: 70,915
Люцерн, Швейцария. Часть 1просмотры: 52,533
Избранное. Часть 1просмотры: 67,037
Живописный мост, Москвапросмотры: 126,314
Рафтинг на реке Замбези, Замбия-Зимбабвепросмотры: 67,826
Венеция. Часть 2
Часть 2
просмотры: 104,101
Египетские пирамиды. Часть 2просмотры: 48,523
Истринское водохранилищепросмотры: 49,611
Айсберги Гренландии. Часть 4просмотры: 45,207
Мельницы Голландии. Часть 2просмотры: 70,851
Венецианский карнавал. Часть 1просмотры: 103,087
Водопад Виктория, Замбия-Зимбабве. Часть 1просмотры: 64,018
Новоиерусалимский монастырьпросмотры: 128,681
Египетские пирамиды. Часть 1
Часть 1
просмотры: 58,482
Пейзажи Гренландии. Часть 3просмотры: 58,940
Мельницы Голландии. Часть 1просмотры: 54,306
Айсберги Гренландии. Часть 2просмотры: 51,863
Бессмертный полк, Москва, 9 мая 2016просмотры: 63,141
На реке Камбальная, часть 2просмотры: 54,743
На реке Камбальная, часть 1просмотры: 66,140
Айсберги Гренландии. Часть 1
Часть 1
просмотры: 92,335
Брайс-Каньон, США. Часть 1просмотры: 199,968
Северное сияние в Исландиипросмотры: 73,555
Медведи в реке Камбальная, часть 3просмотры: 152,290
Манхэттен, Нью-Йорк, СШАпросмотры: 89,308
Раджа-Ампат, Индонезияпросмотры: 132,401
Таймс-сквер, Нью-Йоркпросмотры: 114,233
Вулкан Бромо, Индонезияпросмотры: 145,423
Московский Кремльпросмотры: 119,838
Москва, Россияпросмотры: 115,314
Лиссабон, Португалияпросмотры: 132,946
Порту, Португалияпросмотры: 1,469,525
Антарктида, часть 2просмотры: 165,744
Извержение вулкана Ключевская Сопка, Камчатка, 2015просмотры: 2,988,409
Антарктида, часть 1просмотры: 178,834
Чинкве-Терре, Италияпросмотры: 141,201
Медвежий край, Камчаткапросмотры: 102,741
Парад на Красной площади 9 мая 2015просмотры: 196,987
Грозный, Россияпросмотры: 215,061
Гранд-Каньон, СШАпросмотры: 128,399
Дубай, ОАЭпросмотры: 105,133
Античный город Петра, Иорданияпросмотры: 88,855
Большой Барьерный риф, Австралия. Часть 2
Часть 2
просмотры: 123,225
Эмираты (ОАЭ)просмотры: 108,011
Большой Барьерный риф, Австралия. Часть 1Обзор программ для просмотра сферических 3D панорам 360 на компьютере Windows и MacOS
Какую программу лучше всего использовать для просмотра панорамных 3D фотографий 360? В этой статье мы рассмотрим несколько вариантов подходящего софта и выберем лучший из них.
Сферические 3D панорамы получили большую популярность в последнее время. Такие панорамные фотографии можно снять при помощи камеры 360 или сделать, склеив несколько кадров в одно изображение.
Если открыть 3D панораму в обычном приложении для просмотра изображений, тогда она будет выглядеть как плоская фотография:
Эквидистантная проекция сферической фотопанорамыТакой вид называется эквидистантной проекцией панорамы. На одном изображении мы видим все 360 градусов пространства вокруг точки съемки. В верхней и нижней части этих фотографий имеются большие искажения.
На одном изображении мы видим все 360 градусов пространства вокруг точки съемки. В верхней и нижней части этих фотографий имеются большие искажения.
Если же воспользоваться специализированной программой, панораму 360 можно вращать в любую сторону. Как, например, в 3D туре по какому-нибудь ресторану:
Виртуальный тур по ресторану (клик для просмотра)Среди прочих рассмотрим несколько программ, которые мы уже встречали в обзоре плееров для просмотра видео 360. Во многих случаях будет удобно, когда один софт воспроизводит сразу панорамные фотографии и видеоролики.
Содержание статьи
VideoStitch
- Операционные системы: Windows, MacOS
- Язык интерфейса: Английский
- Цена: Бесплатно
- Скачать: https://www.video-stitch.com/
VideoStitch – простой видеоплеер для видео 360 с возможностью просмотра панорамных фотографий. Эта программа не может похвастаться большим набором инструментов, но основные функции выполняет.
Подробнее
Интерфейс программы VideoStitchPanorama Viewer
- Операционные системы: Все
- Язык интерфейса: Английский
- Цена: Бесплатно
- Скачать: https://chrome.
 google.com/webstore/detail/panorama-viewer/cbplklgcjnhehkoigoankacpmehafhfk/related?hl=ru http://panoramaviewer.1bestlink.net/
google.com/webstore/detail/panorama-viewer/cbplklgcjnhehkoigoankacpmehafhfk/related?hl=ru http://panoramaviewer.1bestlink.net/
Panorama Viewer – не стандартный вариант приложения, а именно, сервис для воспроизведения сферических 3D панорам в браузере. Интерфейс крайне прост:
Подробнее
- Выбор вида панорамы – цилиндрический или сферический.
- 5 последних открытых изображений.
- Кнопка выбора фотографии.
Панораму также можно открыть, просто перетащив ее в окно браузера. Вращение панорамы осуществляется с помощью мыши, а приближение и удаление ее колесиком.
Большим недостатком можно считать невозможность просмотра фотографий весом более 40 Мб.
PTGui Viewer
- Операционные системы: Windows, Mac OS X, Linux
- Язык интерфейса: Английский
- Цена: Бесплатно
- Скачать: https://www.ptgui.com/
PTGui – программа для сшивки панорам из нескольких фотографий. В ее арсенале есть инструмент для просмотра сферических панорам — PTGui Viewer. Этот вариант будет полезен тем, кто склеивает панорамы в PTGui. Это достаточно удобно, но при этом, нет никаких дополнительных функций. Можно открыть только одну фотографию, покрутить и приблизить ее, оценив качество сборки панорамы.
В ее арсенале есть инструмент для просмотра сферических панорам — PTGui Viewer. Этот вариант будет полезен тем, кто склеивает панорамы в PTGui. Это достаточно удобно, но при этом, нет никаких дополнительных функций. Можно открыть только одну фотографию, покрутить и приблизить ее, оценив качество сборки панорамы.
Подробнее
Интерфейс программы PTGui ViewerPTGui Viewer можно использовать отдельно от основного софта. Для этого достаточно кликнуть по изображения правой кнопкой мыши и выбрать «Открыть с помощью». Кстати, просмотр будет работать и в пробной версии ПТГуи.
FSPViewer
- Операционные системы: Windows, Mac OS X, Linux
- Язык интерфейса: Английский
- Цена: Бесплатно
- Скачать: http://www.fsoft.it/FSPViewer/download/
FSPViewer — очень простая и быстрая программа для просмотра панорамных фотографий. Аналогично предыдущему варианту, FSPViewer подойдет профессионалам для оценки качества склейки сферических панорам. В нижней части окна отображаются параметры просмотра: угол поворота по горизонтали и вертикали, угол обзора. При необходимости, можно выставить собственные значения через меню «Tools > Set View Parameters».
В нижней части окна отображаются параметры просмотра: угол поворота по горизонтали и вертикали, угол обзора. При необходимости, можно выставить собственные значения через меню «Tools > Set View Parameters».
Подробнее
Интерфейс программы FSPViewersView
- Операционные системы: Windows 7 / 8.1 / 10 (64 бит), Mac OS X 10.6.8 и новее (с 64-битным процессором Intel), Linux
- Язык интерфейса: Русский (в том числе)
- Цена: Бесплатно
- Скачать: http://www.sview.ru/en/download/
Эту программу мы выбрали лучшей для воспроизведения видео 360. Среди богатого функционала есть и возможность просмотра панорамных фотографий. В отношение управления панорамой ничего особенного – вращение курсором, приближение колесиком. Но в арсенале sView ряд инструментов, которыми не могут похвастаться другие программы.
Подробнее
Интерфейс программы sView- Просмотр панорам в стереоскопическом режиме. Для этого панорама изначально должна быть в формате горизонтальная или вертикальная стереопара.
Для использования режима нужно выбрать формат входного изображения (кнопка «M») и указать способ воспроизведения. Доступно несколько вариантов от самого простого анаглиф (для красно-синих очков), до более продвинутых, например, затворные очки с 3D монитором.
- Возможность настройки цветовой гаммы, яркости и насыщенности фотографий во время просмотра. Эта функция полезна в режиме стерео, когда необходимо изменить цвета изображения для более качественного просмотра.
В sView есть возможность быстрого перехода к другим изображениям при помощи стрелок «влево» и «вправо».
RICOH THETA
- Операционные системы: Windows, Mac OS
- Язык интерфейса: Английский
- Цена: Бесплатно
- Скачать: https://support.theta360.com/ru/download/
RICOH THETA – официальный софт от одноименного производителя камер для съемки видео 360. Использовать программу можно бесплатно даже без приобретения видеокамеры.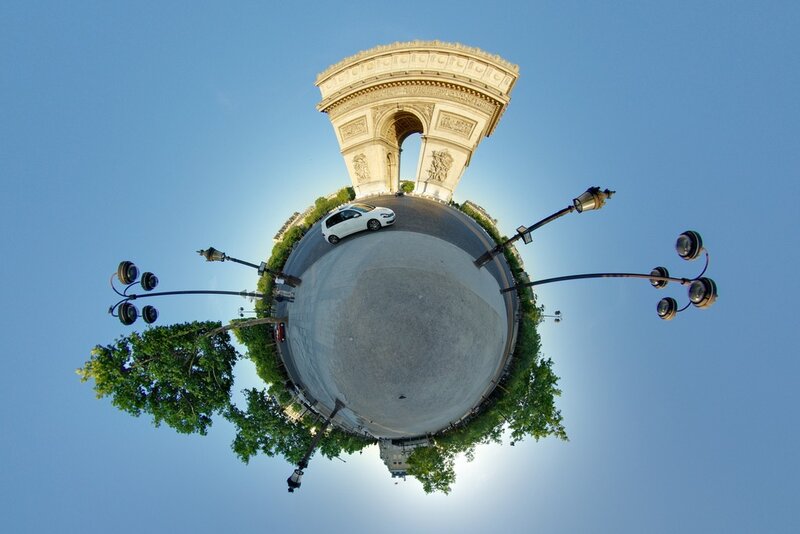 Эта программа удобна в использовании и имеет достаточный функционал. RICOH THETA подойдет как любителям, так и профессионалам.
Эта программа удобна в использовании и имеет достаточный функционал. RICOH THETA подойдет как любителям, так и профессионалам.
Подробнее
Интерфейс программы RICOH THETAВ программе можно переключаться между панорамными фотографиями, что очень удобно.
Интерфейс приложения прост и понятен. Все функциональные кнопки находятся в нижней части экрана:
- Влево-вправо – кнопки перехода к следующей или предыдущей панораме. Поочередно открываются в папке.
- Плюс-минус – кнопки приближения и удаления. Приблизить можно до реального размера пикселя, а удалить вплоть до проекции маленькая планета (круговая панорама).
- Кнопка сброса настроек просмотра. Выставляются первоначальное положение и угол просмотра.
- Автовращение панорамы.
- Полноэкранный режим.
Vrap
- Операционные системы: Windows, Mac OS
- Язык интерфейса: Английский
- Цена: Бесплатно
- Скачать: https://www.airpano.com/vrap.
 php?set_language=2
php?set_language=2
Vrap – очень интересная программа, разработанная на основе популярного софта для создания виртуальных туров KRPano. Vrap собрал в себе массу полезных функций, которые будут полезны и рядовым пользователям, и профессиональным фотографам.
Подробнее
Интерфейс программы VRAPВ программе можно открыть сразу несколько панорамных фотографий. Чтобы увидеть все активные изображение, нужно нажать на кнопку в левой части экрана. Откроется панель предпросмотра, где можно выбрать необходимую фотографию.
Поочередно переключаться между панорамами позволяют кнопки внизу. Здесь же расположена кнопка захвата изображения. С ее помощью можно сделать скриншот части панорамы, которая в данный момент отображается в программе.
Правой кнопкой мыши открывается дополнительное меню. Здесь можно:
- Изменить способ вращения – перетаскивать или указывать направление.
- Выбрать вариант проекции.
- Выбрать просмотр 360 или в плоском виде.
Разные варианты проекции меняют характер отображения панорамы. Например, Architectural – подойдет для просмотра зданий и строений, а Fisheye и Stereographic дают наибольший угол обзора.
Например, Architectural – подойдет для просмотра зданий и строений, а Fisheye и Stereographic дают наибольший угол обзора.
На нижней панели расположена информация о фотографии и настройки просмотра, которые буду полезны для профессиональной работы. Здесь же можно настроить нужные параметры:
- Разрешение, расширение, тип и название файла.
- Угол поворота панорамы по горизонтали и вертикали относительно центральной точки.
- Угол обзора.
- Размер окна просмотра программы и разрешение отображаемой части панорамы.
После закрытия, в программе сохраняются последние просмотренные панорамы.
Выводы
Среди рассмотренных программ больше всего выделяются RICOH THETA и Vrap. В первую очередь, они лучше тем, что имеют возможность перелистывать панорамы. Кроме того, они обладают большим набором дополнительных функций, которые перекрою потребности большинства пользователей. Надеемся, что каждый найдет для себя лучшую программу для просмотра панорамных фотографий 360.
БЛОГ ДМИТРИЯ ЕВТИФЕЕВА | Ricoh Theta S — камера для сферического фото и видео
Здравствуйте, друзья!
Недавно у нас прошёл список новинок фотокамер для сферического фото и видео, а сегодня я уже готов поделиться своими впечатлениями от такой камеры.
Что такое сферическое фото
Что такое сферическое видео
Можно просто объяснить это обзором на 360 градусов, когда вы можете поворачивать свой взгляд в любую сторону. Так можно делать как для фото, так и для видео и ниже будут примеры.
- Ricoh Theta S
- Технические характеристики
- Важные особенности камеры
- Прогулка по Санкт-Петербургу
- Рядом с Эрмитажем
- У «Дома Книги» он же Дом компании Зингер
- Казанский собор
- Арка Главного штаба
- Редактирование изображений
- Сферическое видео
- Полёт Ricoh Theta S на дроне
- 360 градусов на машине
- Сферический таймлапс
- Впечатления от работы и мысли о сферическом фото / видео
- Сферическое фото
- Сферическое видео
- Где можно размещать сферическое фото и видео
- Фото и видеокамера Ricoh Theta S
- Бонус — предсказания будущего
- Бонус — заготовка камеры для монтажа
Встречаем. .. Ricoh Theta S!
.. Ricoh Theta S!
к содержанию ↑
Камера должна была поступить в продажу еще 10 ноября 2015г., а мы её рассматриваем сейчас. Как часто бывает — во всем мире на неё уже снимают, а на прилавках РФ её еще нет. Ожидаются первые партии в апреле.
Можно делать свои предзаказы в Photoprocenter, если она вас заинтересует. Они мне и предоставили камеру для обзора, за что им большое спасибо!
к содержанию ↑
Технические характеристики
| Размер сенсора | 1/2.3″ |
| Съемка фото | 5376×2688 |
| Съемка видео | 1920×1080 |
| Чувствительность | ISO 100 — ISO 1600 |
| Дистанция фокусировки | 10 см — бесконечность |
| Встроенный накопитель | 8 Гб |
| Выдержка | Фото (автоэкспозиция): 1/6400 — 1/8 секунд, Фото (ручные установки): 1/6400 — 60 секунд, Видео (L): 1/8000 — 1/30секунд, Видео (M): 1/8000 — 1/15 секунд, Live streaming (USB): 1/8000 — 1/15 секунд, Live streaming (HDMI): 1/8000 — 1/30 секунд |
| Баланс белого | Автоматическая и ручная настройка |
| Беспроводная связь | Передача снимков по Wi-Fi, настройки и управление процессом съемки с планшета или телефона на iOS и Android |
| Питание | Встроенный Li-ion аккумулятор. Зарядка осуществляется через USB Зарядка осуществляется через USB |
| Размер | 130 x 44 x 22.9 мм |
| Вес | 125 гр. |
к содержанию ↑
Важные особенности камеры
Камера имеет два светосильных фишай объектива с обеих сторон.
Это позволяет из одного снимка получать сферическую панораму. Для фото и видеосъемки на камере есть всего одна кнопка в центре. Нажали на кнопку и фото снято — что может быть проще?
Для фишай вопрос фокусировки по сути не стоит. Фокусировка фиксированная на 10 см, всё остальное будет в фокусе.
Для видео камеру нужно переключить в видеорежим маленькой кнопкой сбоку. Там же находятся кнопки Включения/Выключения питания и Wi-Fi.
Камера может работать по Wi-Fi с устройствами iOS и Android. Я её соединял со смартфоном iPhone 4S и с iPad Air. Стыковка прошла очень легко, особенно когда я угадал пароль 🙂
В инструкции немного непонятно написано какой пароль для камеры. А на самом деле пароль состоит из «00» и нижней строки на торце камеры.
А на самом деле пароль состоит из «00» и нижней строки на торце камеры.
Но у вас может получиться и иначе.
На фото вы видите два разъема. Один — USB и его можно использовать для перекачки файлов на компьютер и для зарядки, а другой HDMI — передачи фото видео на монитор, если нет компьютера под рукой. В центре круглое отверстие — крепление под штатив. И это крайне важно т.к. без этого крепления мы всегда наблюдали бы свою физиономию в кадре, как вы будете иметь «удовольствие» видеть меня на всех следующих фото т.к. в этот раз я поленился использовать штатив 🙂
Оцените возможность не только копировать снимки на планшет, но и переносить их! Ведь место в камере ограничено, а снимать так хочется… В планшете вы чаще всего имеете больше места. Также с планшета или телефона удобно просматривать результат и выкладывать в сеть. Всё автоматизировано!
Звучит всё очень хорошо, но в реальности далеко не все сервисы понимают сферическое фото, а тем более видео.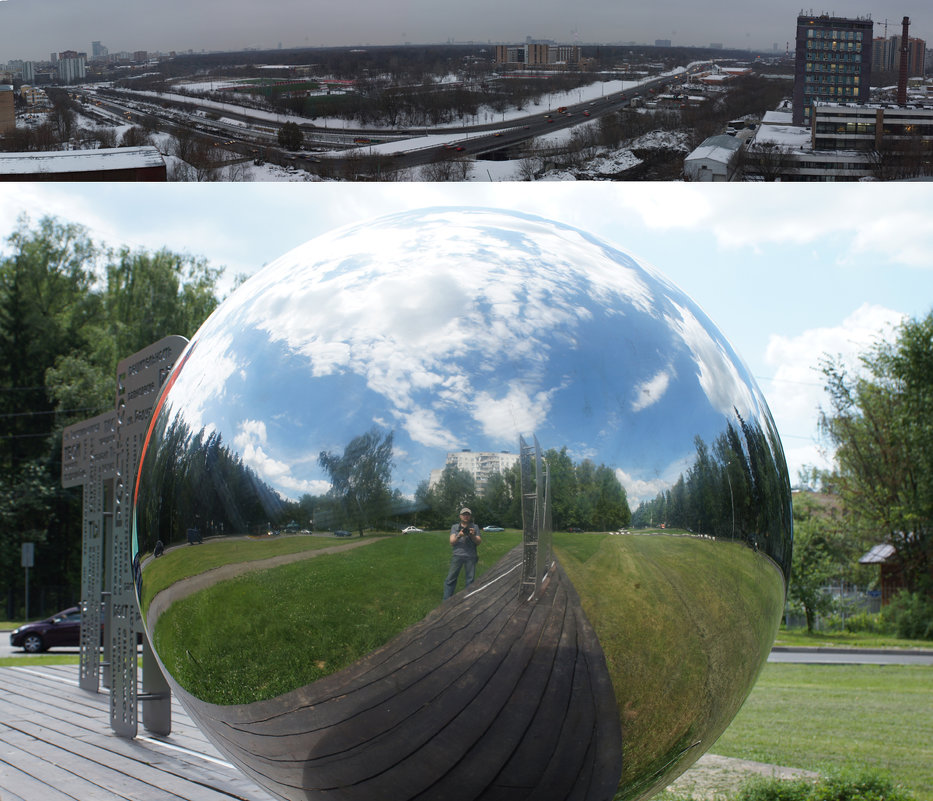 Потому я предпочёл публиковать свои фото всё-таки с компьютера. Тем более, чем когда снимаешь сам, то в кадре самое крупное место — это твой ноготь 🙂 (камера так сшивает, что её самой в кадре не оказывается). И потому предпочтительно это место зафотошопить, чтобы не было огромных пальцев в центре кадра. Второй вариант — ставить камеру на стол или еще куда-нибудь или давать камеру подруге, у которой более презентабельные пальчики.
Потому я предпочёл публиковать свои фото всё-таки с компьютера. Тем более, чем когда снимаешь сам, то в кадре самое крупное место — это твой ноготь 🙂 (камера так сшивает, что её самой в кадре не оказывается). И потому предпочтительно это место зафотошопить, чтобы не было огромных пальцев в центре кадра. Второй вариант — ставить камеру на стол или еще куда-нибудь или давать камеру подруге, у которой более презентабельные пальчики.
«Забугорщики» также рекомендуют держать камеру за мини-штатив или просто за нижний конец, подальше от объектива. Но это не решает проблему полностью и вообще половинчатый путь — не наш путь. Далее в статье мы рассмотрим редактирование сферических фото.
к содержанию ↑
Прогулка по Санкт-Петербургу
Панорамы вставлены уменьшенного размера т.к. они довольно увесистые. Все сняты на Ricoh Theta S одним кадром. Снимки можно вращать с помощью «мыши» или кнопками на клавиатуре.
к содержанию ↑
Рядом с Эрмитажем
This content requires HTML5/CSS3, WebGL, or Adobe Flash Player Version 9 or higher.
Please enable Javascript!
This content requires HTML5/CSS3, WebGL, or Adobe Flash Player Version 9 or higher.
Please enable Javascript!
Нужно сказать, что никто не понимает, что у меня в руках камера для сферической съемки (они пока редки) и потому снимать можно что угодно. Можете безнаказанно снимать даже в метро. Все думают, что это смартфон и не представляют углы обзора такой камеры.
к содержанию ↑
У «Дома Книги» он же Дом компании Зингер
This content requires HTML5/CSS3, WebGL, or Adobe Flash Player Version 9 or higher.
Please enable Javascript!
к содержанию ↑
Казанский собор
This content requires HTML5/CSS3, WebGL, or Adobe Flash Player Version 9 or higher.
Please enable Javascript!
к содержанию ↑
Арка Главного штаба
This content requires HTML5/CSS3, WebGL, or Adobe Flash Player Version 9 or higher.
Please enable Javascript!
к содержанию ↑
Редактирование изображений
Сферические фото не так просто редактировать т.к. они очень сильно искажены.
Понять где тут начинаются мои пальцы и где они заканчиваются довольно сложно.
Потому мы пойдём в программу Pano2VR и загрузим туда наше фото.
В данном случае мне нужен пункт «Корректор», который позволяет делать заплатки на фото.
добавляю коррекцию
выбираю область редактирования, нажимаю «извлечь»
Область извлечена, нажимаю иконку с монитором, чтобы получить к ней доступ
Наша заплатка открывается в назначенном в вашей системе просмотровщике. У меня в ACDsee. Из него перекидываю файл в фотошоп.
В фотошопе накладываю на свои пальцы какую-то картинку. Можно просто круг нарисовать с логотипом, можно что-то еще.
Я хотел использовать верхнюю часть айфона, но такой картинки не нашёл в интернете, так что использовал нижнюю. В принципе, какая разница, кто будет разглядывать.
В принципе, какая разница, кто будет разглядывать.
Слои слил и сохранил заплатку.
готовая заплатка
Теперь когда я нажму ОК в PanoVR в окошке «корректировка текстуры» из которого мы не выходили, программа предложит обновить с коррекцией.
Согласимся.
Теперь наша панорама выглядит иначе.
Экспортируем её для вставки в блог, например.
Выберем формат HTML5.
Для того, чтобы сгенерировать пригодный формат для вставки в блог на WordPress используем ggpkg формат.
В WordPress устанавливаем плагин GGPKG Import — Import Pano2VR & Object2VR Content into WordPress.
Загружаем наш файл R0010044-1.ggpkg как обычный медиафайл и вставляем в запись. Вставится как объект ggpkg.
This content requires HTML5/CSS3, WebGL, or Adobe Flash Player Version 9 or higher.
Please enable Javascript!
Он же может быть экспортирован в виде полярной сферической панорамы и вставлен как картинка.
к содержанию ↑
Сферическое видео
Я, конечно, наснимал сферического видео, но оно не сравнится с тем, что можно снять с дрона. Потому выкладываю эти ролики с ютуба.
к содержанию ↑
Полёт Ricoh Theta S на дроне
к содержанию ↑
360 градусов на машине
к содержанию ↑
Сферический таймлапс
Кроме фото и видео камера позволяет снимать таймлапс с возможностями сферического фото или, как вариант, видео.
Функция довольно интересная т.к. даёт полное представление, что происходит в определенном месте за день.
Из плюсов также можно отметить то, что в отличие от видео, которое ограничено 1080p, сшитые фотоснимки дают нам бОльшее разрешение (2688p).
При просмотре не забудьте переключиться на 2160p качества ролика в настройках.
к содержанию ↑
Впечатления от работы и мысли о сферическом фото / видео
к содержанию ↑
Сферическое фото
Если говорить кратко, то сферическое фото, которое можно снять одним кадром просто изумляет. Это я говорю без радостной маркетинговой требухи. Это настоящий прорыв в фотоиндустрии и не стоит его недооценивать. Уже сейчас фотокамеры с возможностью съемки 360 градусов потеснят смартфоны, компактные фотокамеры, да и многие другие варианты для фото и видеосъемки.
Конечно, такие камеры не заменят полноценные фотокамеры. Всегда останется ниша для обычного фото с определенным углом зрения и высоким разрешением.
Но многие люди, наверняка, найдут у себя потребности оказаться на фото одновременно со своими друзьями или семьей. Хватит бы вне кадра! Долой фотографическое рабство! 🙂 Теперь фотограф тоже в кадре. Да он собственно не фотограф теперь, а такой же объект съемки, как и остальные.
Да он собственно не фотограф теперь, а такой же объект съемки, как и остальные.
И вот тут важное отличие данных фотокамер от каких-либо других решений для сферического фото или видео.
Оно совсем не требует навыков съемки и с ним может справиться любой. Даже ребенок (мой 4-х летний сын вполне справился и наделе кучу интерьеров квартиры).
к содержанию ↑
Сферическое видео
Честно говоря о сферическом видео я узнал после знакомства с камерой Ricoh Theta S т.к. ранее сферическое видео было уделом профессионалов-видеографов, требовало тщательной стыковки оборудования и сложного монтажа (например, стыковали камеры gopro).
Теперь же любой может снять сферическое видео и простым образом его отредактировать (есть приложения у компании Ricoh и есть что-то на Youtube).
к содержанию ↑
Где можно размещать сферическое фото и видео
Сферическое фото можно размещать на Flikr (кстати, подписывайтесь на Flikr’e на меня, я там буду выкладывать фото со многих интересных объективов в большом размере). Сложно сказать, как Flikr распознает сферическую панораму, но не помещает поставить тег «equirectangular».
Сложно сказать, как Flikr распознает сферическую панораму, но не помещает поставить тег «equirectangular».
Сферическое видео можно загружать на Youtube. Youtube уже вполне уверенно распознает сферическое видео с известных ему камер. Особенно с новых, которые правильно вставляют метатеги в видео. Раньше с этим были проблемы и видео нужно было перерабатывать на предмет тегов, а теперь видео с Ricoh Theta S можно просто закачать и оно распознается.
Обратите внимание, что не все браузеры понимают сферическое видео. Я смотрю в Chrome и тут все ок. Также смотрю на iPad Air и там тоже все ок, можно направлять взгляд во все стороны пальцем. Если у вас оно нормально не показывается — попробуйте другой браузер.
к содержанию ↑
Фото и видеокамера Ricoh Theta S
Ricoh Theta S заслуживает отдельного внимания. Это очень продуманное устройство, простое в обращении и дающее неплохое качество съемки.
Это очень продуманное устройство, простое в обращении и дающее неплохое качество съемки.
Хочется, как всегда, большего. Я бы хотел, чтобы у камеры были не два сенсора по 12 Мпикс (производитель неизвестен), а два сенсора по 36 Мпикс от Sony с тем же качеством. Да, технологически это сложно представить, но вот когда смотришь фото, то сразу начинаешь думать: «А вот если бы… Да чтобы ДД был как у полнокадровой камеры, да разрешение, да детализация…».
Что же… Придёт время и всё это как-то будет реализовано. Но снимать можно и нужно уже сейчас! Я уже сейчас могу пойти в тот же Эрмитаж, пройти все залы со скоростью 5 км/час и сделать снимки всех залов в один день! Когда это было возможно? Вы можете себе представить, как это сделать с большой зеркалкой, со штативом и не привлекая внимания? Я — нет.
Для того, чтобы снять себя и друзей за столом в кафе что может быть лучше? Не нужно всем доставать свои телефоны и щелкать друг друга! Поставили в центр стола, нажали кнопку на телефоне и вот вы все на одном кадре!
Собрались покататься на сноуборде, на кайте или полетать на параплане? А может вы любите прыгать с парашютом? Что может быть лучше, чем такая «малышка»? Дайте и более трусливым друзьям насладиться вашим полётом, вращая головой во все стороны!
Ну что же, можно сказать будущее наконец наступило?
Наши дети уже не будут смотреть обычное видео и будут удивляться, если в фильме нельзя крутить головой героя влево и вправо…
А какое это подспорье для блоггеров и прочих генераторов новостей? Один раз прошёлся с камерой по месту события и вот ответы на все вопросы…
Тот редкий случай, когда я признаю революционное изменение в индустрии.
Ricoh Theta S можно найти здесь
к содержанию ↑
Вот технология сферического видео появилась не сегодня и у нынешней камеры Ricoh Theta S была предшественница, которая была попроще, но тоже работала.
Почему же я вижу новые смартфоны с банальными плоскими камерами? Производители смартфонов слепы или тупы? Вовсе нет. Было бы глупо недооценивать крупные корпорации. Они как огромные пауки в паутине чувствуют каждое дрожание ниточки. Я уверен, что скоро будет момент, когда нас просто завалят такими смартфонами. И ситуация будет развиваться как всегда — выскочит кто-то один и заявит, что это он именно и придумал.
Но качество камеры будет плохое (там же два сенсора минимум по 12 Мпикс, а сейчас ставят максимум 8 за редким исключением). Потом выскочит кто-то другой с качеством чуть лучше и опять объявят «смену правительства».
Короче говоря нужно брать что есть сейчас и снимать. До реальных камер с разрешением 36 Мпикс с двух сторон еще далеко 🙂
к содержанию ↑
Чтобы победить проблему «больших пальцев», т.е. ту проблему, при которой вы видите крупным планом свои ногти в кадре, если держите камеру в руке пригодится вот эта заготовка камеры.
[lock][download id=486][/lock]
500+ изображений сфер | Скачать бесплатные изображения на Unsplash
500+ сферических изображений | Скачать бесплатные изображения на Unsplash- A Photophotos 10k
- А.
 изображение
изображение текстура
рамка — граница
концепции
Hd black wallpapers
Hd dark wallpapers
globe
glass
Hd geometric wallpapers
acryllic
Christmas images
white color
Hd red wallpapers
reflection
orb
glassorb
soldiers beach
norah head nsw
australia
абстрактные обои Hd
красный белый черный
астрономия
космические картинки
планета
синие обои Hd
Нью-йорк картинки и изображения
usa
зеленые обои hd
серые обои hd
обои узоры hd
–0–0–10 текстурные фоны 900–1 – – –––– – –––– –– – –– –––– – – –– ––– –– –––– – –.Серые обои Hd
цифровое изображение
Canada
Фоновые изображения Hq
Обои Hd
Обои Hd
Hd white wallpapers
Hd pattern wallpapers
minimal
Light backgrounds
Hd purple wallpapers
bright
chelsea piers
ny
Hd computer wallpapers
Sports images
sitting
gym
deutschland
schwerin
forrest
Hd узорные обои
Pattern backgrounds
Lensball
render
Hd 3d обои
MinimalIsitc
Связанные коллекции
Sphere
82 Фотографии · Куратор Claudia WondergemSphere
52 Фото картинкигармония
радость
рамка — граница
концепции
Hq фоновые изображения
Hd обои
Hd обои
Light backgrounds
Hd purple wallpapers
bright
chelsea piers
ny
Hd computer wallpapers
deutschland
schwerin
forrest
render
Hd 3d wallpapers
minimalisitc
People images & pictures
гармония
радость
серые обои Hd
цифровое изображение
канада
стекло
геометрические обои Hd
acryllic
Christmas images
white color
Hd red wallpapers
soldiers beach
norah head nsw
australia
Sports images
sitting
gym
Outer space pictures
planet
Hd blue Обои
Серые обои Hd
Обои Hd с рисунком
Текстурные фоны
–––– –––– –––– – –––– – –––– –– ––– –––– – – –– ––– –– –––– – –.

Hd black wallpapers
Hd dark wallpapers
globe
Hd white wallpapers
Hd pattern wallpapers
minimal
reflection
orb
glassorb
Hd abstract wallpapers
red white black
astronomy
Похожие коллекции
Sphere
82 фото · Куратор Claudia WondergemSphere
52 фото · Куратор Carolin VoigtIndigo Sphere Веб -сайт
128 Фотографии · Куратор By Starshine GuyHD Обои для узора
Разобедбра Getty Images
Unsplash+
Разблокировать
рамка — граница
концепции
Милад Факуриан
Hd серые обои
цифровое изображение
Канада
–––– –––– –––– – –––– – –––– –– – –– –––– – –– ––– –– –––– – –.
amirali mirhashemian
Hd black wallpapers
Hd dark wallpapers
globe
Milad Fakurian
Hq background images
Hd wallpapers
Hd art wallpapers
glass
Hd geometric wallpapers
acryllic
Ellen Qin
Белые обои Hd
Обои Hd с рисунком
minimal
Unsplash logoUnsplash+In collaboration with Getty Images
Unsplash+
Unlock
Christmas images
white color
Hd red wallpapers
Szilvia Basso
Light backgrounds
Hd purple wallpapers
bright
Виктор Форгач
отражение
сфера
стеклянная сфера
Николь Авальяно
солдатский пляж
норах голова nsw
australia
Aaron Smulktis
chelsea piers
ny
Hd computer wallpapers
Alina Kompa
Hd abstract wallpapers
red white black
astronomy
Unsplash logoUnsplash+In collaboration with Getty Images
Unsplash+
Разблокировать
Спортивные фото
сидя
тренажерный зал
Павел Червинский
Космос фото
планета
Hd blue wallpapers
Mario Losereit
deutschland
schwerin
forrest
Robert Stump
Hd pattern wallpapers
Pattern backgrounds
lensball
Sebastian Svenson
render
Hd 3d wallpapers
minimalisitc
Милад Факуриан
Нью-Йорк картинки и изображения
США
Зеленые обои Hd
Логотип UnsplashUnsplash+В сотрудничестве с Getty Images
Unsplash+
разблокировка
People Изображения и картинки
Harmony
Joy
Ellen Qin
HD Grey Walpapers
HD Узорные обои
Фоно -фоновый фоновый фон
Browse Premium Premium Premmive.
 Скидка 20% на Unsplash logo
Скидка 20% на Unsplash logo Сделайте что-нибудь потрясающее
Сфера — изображение и фото
1.266.900Снимок
- Изображение
- Фото
- Графика 9 iStock0004
- Vektoren
- Videos
Niedrigster Preis
SignatureBeste Qualität
Durchstöbern Sie 1.266.900
Stock Bindotogra 904 сфера Odersuchen Sie nach kugel oder space, um noch mehr faszinierende Stock-Bilder zu entdecken. Реалистичная природная жемчужина, изолированная на глубине земли. — сфера сток-графика, -клипарт, -мультфильмы и -символРеалистичные природные Perle isoliert auf weißem Hintergrund.
schokoladen-bälle — сфера сток-фото и изображенияSchokoladen-Bälle
руки wahrsagerin — сфера сток-фотографии и изображенияруки Wahrsagerin
weiße kugel studio-rendering — сфера сток-фотографии и изображенияWeiße Kugel 19amnsnendering Studio-0Rendering schwarzen kugeln zum mittleren licht.
 anziehung фон objekten мит langen schatten. 3d абстрактный концепт zusammenarbeit. magnetische anziehung von objekten auf zentraleformation rendern. — сфера стоковых фотографий и изображений
anziehung фон objekten мит langen schatten. 3d абстрактный концепт zusammenarbeit. magnetische anziehung von objekten auf zentraleformation rendern. — сфера стоковых фотографий и изображений Sammeln von schwarzen Kugeln zum mittleren Licht. Anziehung von…
Sammeln von schwarzen Kugeln zum mittleren Licht. Anziehung von Objekten mit langen Schatten. Abstraktes 3D-Konzept der Zusammenarbeit. Магнитный Anziehung от объекта в центре Formations-Rendering
диско-шар — сфера фото и изображенияDisco Ball
вектор 3d мяч. реалистичный 3D-график. — сфера сток-графика, -клипарт, -мультфильмы и -символВектор 3D Кугель. Реалистичная 3D-графика.
3D-Кугель. Реалистичный блестящий 3D-мяч. Вектор.
3D изолированная золотая луна. — сфера фото и изображения3 D изолированная Золотая Луна.
абстрактный черный и золотой фон — сфера стоковых изображений, -клипартов, -мультфильмов и -символов stehtOrange gefärbter Ball, der auf blue Wellenbändern auf blauem Hintergrund steht, kann in Balance-, Karrieewachstums- usw.
das mädchen hält den planeten erde in ihren handen. — сфера сток-графика, -клипарт, -мультфильмы и -символ Konzepten verwendet werden. (3D-рендеринг)
Konzepten verwendet werden. (3D-рендеринг) Das Mädchen hält den Planeten Erde in ihren Händen.
Das Mädchen hält den Planeten Erde in ihren Händen. Eine Low-Poly-Construktion aus miteinander verbunden Leitungen und Punkten. Блауэр Хинтергрунд.
schwebende kugeln mit neonlicht — сфера фото и изображенияschwebende Kugeln mit Neonlicht
abstrakter Hintergrund schwebenden Kugeln auf metallischem Hintergrund mit Neonbeleuchtung. 3D-рендеринг
bunte 3d геометрическая форма на белом фоне. — сфера сток-графика, -клипарт, -мультфильмы и -символBunte 3D геометрические формы на Weißem Hintergrund.
Геометрическая 3D-форма Bunte auf weißem Hintergrund. Абстрактная векторная композиция.
декоративный гранитный кугель на фоне бюргерстайга — сфера, стоковые фотографии и изображениядекоративный гранитный кугель на фоне бюргерштайга
3d абстрактный летающий кугель с изображением синего хинтергрунда — сфера, стоковые фотографии и изображения3D abstrakte fliegende Kugeln mit Rahmen auf blauem Hintergrund
hintergrund des abstrakten kreislichteffekts — sphere stock-grafiken, -clipart, -cartoons und -symboleHintergrund des abstrakten Kreislichteffekts
Hintergrund des abstrakten Kreislichteffekts im Vektor
punkt und kurve aus dem bereich gitternetzlinien . — сфера графика, клипарт, мультфильмы и символы
— сфера графика, клипарт, мультфильмы и символы Punkt und Kurve aus Bereich Gitternetzlinien.
Точки и кривые конструкции каркаса каркаса, технологическая абстрактная иллюстрация.
Абстрактная форма фона. 3d-иллюстрация, 3d-рендеринг. — сфера фото и фотографииАбстрактная форма Hintergrund. 3D-иллюстрация, 3D-рендеринг.
Bunte JonglierBälle — vor Weißem Hintergrund — сфера стоковых фотографий и изображенийBunte Jonglierbälle — vor weißem Hintergrund
Волшебное оружие и твердый символ. wahrsager runde kristall mit glänzenden sternen. хэллоуин-вектор-дизайн-концепт, umriss стиль пиктограммы на Weißem Hintergrund, verwendung для веб-сайтов и приложений. eps 10. — сфера сток-графика, -клипарт, -мультфильмы и -символВолшебные украшения и символ твердых тел. Wahrsager runde Kristall…
Magische Balllinie und durchgezogenes Symbol. Wahrsagerin runder Kristall mit glänzenden Sternen.
3D-модель — сфера стоковых фотографий и изображений Halloween-Vektor-Design-Konzept, Outline-Stil Piktogramm auf weißem Hintergrund, Verwendung für Web und App. Eps 10
Halloween-Vektor-Design-Konzept, Outline-Stil Piktogramm auf weißem Hintergrund, Verwendung für Web und App. Eps 10 3D-модель
— векторный рисунок в стиле каракулей. ein garnknäuel zum striken und häkeln. schwarz-weiß-grafikzeichnung, bastelsymbol, хобби, häusliches leben — сфера, графика, -клипарт, -мультфильмы и -символVektorzeichnung в стиле Doodle. ein Garnknäuel zum Stricken…
action-reaktion ich — сфера фото и фотографииAction-Reaktion ich
Pendelkonzept I (Aktion — Reaktion).
3 д кугель. глобальный цифровой verbindungen. технология-концепт. — сфера сток-график, -клипарт, -мультфильмы и -символ3 д Кугель. Global digitalen Verbindungen. Технология-Концепт.
3Д-Кугель. Globale digitale Verbindungen. Технологииконцепт. Векториллюстрация.
ball silber kugel chrom weiß runde grundlegende kreis perle — сфера стоковые фотографии и изображенияBall Silver Kugel Chrom weiß Runde Taste grundlegende Kreis Perle
Kugel silberne Kugel chrom weiße Perle runder Knopf, Grundkreis geometrische Form feste einzelne Tropfen glänzend funkelndes Objekt leere Ballon-Symbol.
flüssige farben abstrakte kugel — сфера, графика, клипарт, мультфильмы и символы 3D-Render-Illustration
3D-Render-Illustration Flussige Farben abstrakte Kugel
Flussige Farben abstrakte Kugel. Векториллюстрация.
erdkugel in einer kontinuierlichen linienzeichnung. Runde Weltkarte im einfachen doodle-stil. infografik gebietsgeographie darstellung isoliert auf weißem hintergrund. вектор-иллюстрация — сфера сток-графика, -клипарт, -мультфильмы и -символErdkugel в einer kontinuierlichen Linienzeichnung. Runde…
bunte sardard, pool-bälle mit zahlen auf gruemhintergrund. реалистичный гламурный снукер-кугель. векторная иллюстрация — сфера, графика, клипарт, мультфильмы и символыBunte Sardard, Pool-Bälle mit Zahlen auf grauem Hintergrund….
bereichen. фантастическая геометрическая 3D-форма — сфера, графика, клипарт, мультфильмы и символыBereichen. Геометрическая 3D-форма Farbige
satz von 3d-elementen-sphere Stock-grafiken, -clipart, -cartoons und -symboleSatz von 3D-Elementen
cellophan-füllung und karton-sphere stock-fotos und bilderCellophan-Füllung und Karton
Ein Klumpen zerknitterter Zellophan-Verpackungsfüller neben einem offenen Karton.
Frau Hält Frisch Produzierte Samenkugeln Oder Samenbomben auf Blauem Hintergrund. kopierraum — сфера стоковых фотографий и картинок Sicherheit von Paketen und Dingen während des Transports und der Lagerung
Sicherheit von Paketen und Dingen während des Transports und der Lagerung Frau hält frisch produzierte Samenkugeln oder Samenbomben auf…
mozart-ball — сфера стоковых фотографий и картинокMozart-Ball
globus-set mit gesicht und verschiedenen эмоциональный — сфера stock-grafiken, -clipart, -cartoons und -symboleGlobus-Set mit Gesicht und verschiedenen Emotionen
frau im wald, die auf ein mysteriöses objekt zugeht — сфера, стоковые фотографии и изображенияЖенщина в лесу, таинственный объект, созданный
Женщина в лесу, таинственный объект, созданный в 3D.
обложка-дизайн-ворлаж. абстрактный геометрический дизайн. vektorillustration aus verschiedenen überlappenden elementen. anwendbar für баннер, плакат, плакат, флаер. — сфера сток-графика, -клипарт, -мультфильмы и -символCover-Design-Vorlage.
Абстрактные синие 3D-изображения, выполненные в чистом виде. Elegante abstrakte zerstörte kugel. визуализация больших данных — сфера, графика, клипарт, мультфильмы и символы Абстрактные геометрические конструкции….
Абстрактные геометрические конструкции…. Abstraktes Blau 3D Beleuchtete Verzerrte Netzkugel. Elegante…
Einziges zitroneneis in Kegel isoliert auf Weißem Hintergrund — сфера стоковые фотографии и изображенияEinziges Zitroneneis in Kegel isoliert auf weißem Hintergrund
Диско-шар — сфера сток-фотографии и изображенияДиско-шар
Discokugel and Decgendekugel в einem Nachtclub
öltropfen und schönheitscreme — сфера фото и фотографииoltropfen und schönheitscreme
clare glasblase. реалистичный синий кугель. 3D-мяч на прозрачном фоне. glänzendes kristallobjekt mit schatten- und lichtreflexion. kreis-form-objektiv-vorlage. вектор-рундвассертропфен — сфера сток-графика, -клипарт, -мультфильмы и -символКлэр Гласблаз. Реалистичный синий Кугель.
Основы абстрактных краеугольных эффектов — сфера, графика, -клипарт, -мультфильмы и -символ -symbole 3D-Ball auf…
3D-Ball auf… Globe-Set und Welt Karte
Vector-Globus-Set und Weltkarte
3D-рендеринг золотого изображения и отражения диска — сфера стоковых фотографий и изображений3D-рендеринг золотого изображения и отражения…
3D-Darstellung einer Golden leuchtenden und reflektierenden Discokugel, isoliert auf schwarzem Hintergrund
Bälle im Sport 1 — сфера стоковых фотографий и изображенийBälle im sport 1
gruppe von schwarz-weißen G09peißen lottokugeln 1 biruptokugeln — сфера стока schwarz-weißen Lottokugeln вектор футуристический kugel aus teilchen und linien. netzwerkverbindung больших данных. abstrakter technologiehintergrund. — сфера сток-графика, -клипарт, -мультфильмы и -символВектор футуристического искусства, аус Teilchen und Linien….
реалистичный коллагеновый тропфхен setzen isoliert auf weißem hintergrund. реалистичные векторные изображения, голубая королева, 3d векторное изображение — сфера, графика, клипарт, мультфильмы и символы , -clipart, -cartoons und -symbole
реалистичные векторные изображения, голубая королева, 3d векторное изображение — сфера, графика, клипарт, мультфильмы и символы , -clipart, -cartoons und -symbole Dynamische Welt mit Pfeil
Dynamic Globe mit Pfeilkonzept идеально подходит для фирменного стиля. Векториллюстрация.
drucken — сфера стоковая графика, -клипарт, -мультфильмы и -символdrucken
kristallkugel auf weißem hintergrund 3d-rendern — сфера стоковые фотографии и изображенияKristallkugel auf weißem Hintergrund 3D-Rendern
stapel schkugelnunder gold сфера -fotos und bilderStapel schwarzer und golder Kugeln
Stapel schwarzer Kugeln mit Goldener Kugel oben auf dunklem Hintergrund
globusgitterkugeln. gestreifte 3d-kugeln, geometrie-globusgitter, erdbreiten- und längengradlinien-vektorsymbolen. kugelgitter-globus-forms — сфера сток-графика, -клипарт, -мультфильмы и -символГлобусГиттеркугельн.
реалистичные изображения с синей радужной оболочкой на белом фоне — сфера стоковые фотографии и изображения Gestreifte 3D-Kugeln, Geometrie-Globusgitter,
Gestreifte 3D-Kugeln, Geometrie-Globusgitter, реалистичные изображения с синей радужной оболочкой и… символ — сфера фондовая графика, -клипарт, -мультфильмы и -символ
Вектор 3D Кугель Эрде Растр вертикальный Линии Breitengrad-Sym
белый и оранжевый пинг-понг изолированы на белом фоне — сфера фондовая графика, -клипарт, — мультфильмы и символWeiße und Orange Ping-Pong-Kugeln isoliert auf weißem Hintergrund
Weiße und Orangefarbene Tischtennisbälle isoliert auf weißem Hintergrund. Vektor-Illustration
lichterscheinung — сфера сток-графика, -клипарт, -мультфильмы и -символLichterscheinung
Transparenter Lichteffect im Vektor
большой прозрачный стеклянный купол. прозрачный в векторных данных — сфера стоковой графики, -клипарт, -мультфильмы и -символБольшой прозрачный стеклянный купол.
3D emoji mit smiley gesicht — сфера фото и изображения Transparenz nur в Вектор-Датеи
Transparenz nur в Вектор-Датеи 3D Emoji mit Smiley Gesicht
chrome kugel isoliert auf weißer Hintergrund Realistische — сфера stock-grafiken, -clipart, -cartoons und -symboleChrom Kugel isoliert auf Weißer Hintergrund Realist
фон 100
Геометрические диковинки Дэна — Как сделать сферическую панораму из бумаги
авг 30
Как сделать сферическую панораму из бумаги
На фотографиях обычно виден только прямоугольный фрагмент сцены, когда был сделан снимок. Типичные панорамные изображения отображают больше пейзажа, но они все же не захватывают всю картину. Даже 360-градусная панорама захватывает только горизонтальный круг, не включая землю и небо.
Что делать, если у вас есть красивая сцена, которую вы хотите передать полностью? Я покажу вам, как сделать сферическую панораму, используя все 4π стерадиан с программным обеспечением, принтером и бумагой.
Мой пример — несезонная рождественская сцена, потому что я играл с ней несколько месяцев назад.
 Может быть, мы можем представить, что это празднование Рождества, которое проводится зимой в южном полушарии.
Может быть, мы можем представить, что это празднование Рождества, которое проводится зимой в южном полушарии. Инструменты для создания панорамных изображений
Первым бесплатным инструментом, который я бы порекомендовал, является Microsoft Photosynth, который создает панорамы и другие иммерсивные изображения и видео. Вы можете использовать Photosynth на компьютере или в виде приложения на смартфоне или планшете. Приложение для iPhone автоматически делает снимки, когда вы направляете камеру в разных направлениях, и сшивает их в панораму. Вот интерактивная панорама, которую я сделал внутри своего дома:
Второй — Hugin, бесплатный инструмент для компьютера, который дает вам больше свободы для построения панорамы, хотя и требует более высокой кривой обучения. Вы можете импортировать фотографии с любой камеры, и программа соединит их вместе. Вы также можете помочь ему найти совпадения между фотографиями, чтобы лучше совместить их, и изменить настройки, чтобы сделать панораму как можно более бесшовной.
 Вы также можете выбирать разные проекции, что позволяет создавать интересные художественные эффекты. Например, одна из моих любимых проекций называется стереографической проекцией, которая используется здесь, так как в этом «маленьком мире» эффект напоминает Le Petit Prince, снято на моем заднем дворе.
Вы также можете выбирать разные проекции, что позволяет создавать интересные художественные эффекты. Например, одна из моих любимых проекций называется стереографической проекцией, которая используется здесь, так как в этом «маленьком мире» эффект напоминает Le Petit Prince, снято на моем заднем дворе.
Определение координат и проекций
Эти инструменты могут создать 2D-представление сцены, но нам нужна 3D-сфера. Вы, наверное, знакомы с проблемой превращения глобуса в карту мира: вам нужно сделать проекцию, чтобы перевести 3D-глобус в 2D-карту. Здесь мы хотим пойти в другом направлении.
Для этого проекта я предпочитаю равнопрямоугольную проекцию, потому что она имеет хорошее свойство: горизонтальная координата — это долгота, а вертикальная — широта. Это делает математику отображения намного проще. Теперь отображение на сферу равно
$$\begin{bmatrix}x\\y\\z\end{bmatrix}=\begin{bmatrix}\sin{\theta}\; \cos{\phi}\\ \sin{\theta}\;\sin{\phi}\\ \cos{\theta}\end{bmatrix},$$
, где \(\theta\) и \( \phi\) — стандартные сферические координаты.
 Но этих координат недостаточно; Я хочу сделать физическую модель этой сферы.
Но этих координат недостаточно; Я хочу сделать физическую модель этой сферы. Решение состоит в том, чтобы математически найти правильную форму для 10 (или некоторого большого количества) изображений в форме лепестков, чтобы сферическое изображение можно было распечатать на нескольких плоских листах бумаги, а затем свернуть вместе, чтобы сформировать приближение сфера. Сфера разделена на некоторое количество секторов (областей с \(\phi\), ограниченных между \(\frac{2\pi i}{n}\) и \(\frac{2\pi (i+1)} {п}\)). Затем бумажные лепестки соединятся или образуют кобордизм между этими конечными точками.
После построения и последующей печати правильной граничной функции в Mathematica, вот как выглядят лепестки, когда они соединяются в точке, которая станет зенитом: мы можем сделать панорамное изображение и спроецировать его на поверхность с лепестками. Вы можете сделать полносферное панорамное изображение (в виде равнопрямоугольной карты) с помощью программного обеспечения по вашему выбору.
 Высота должна быть четным числом пикселей.
Высота должна быть четным числом пикселей. Затем я импортировал фотографию в Mathematica и написал программу для ее обработки. Если вы хотите попробовать мой код Mathematica для этого, вы можете импортировать этот текстовый файл в Mathematica.
Я решил чередовать направления лепестков, чтобы минимизировать расход бумаги (а также стоимость).
Я вырезала лепестки, и каждый из них скрутила, чтобы было легче соединить их вместе.
Затем я наклеил ленту на белую поверхность (внутреннюю), чтобы придать лепесткам сферическую форму. Получилось два полушария:
Вот обратная сторона:
Что-то начинает походить! Теперь осталось склеить два полушария вместе:
И готово!
Что попробовать
Сферу можно подвесить на леске. Когда он вращается, иногда кажется, что сфера выворачивается наизнанку, и создается впечатление, что вы смотрите на комнату через круглый портал через линзу типа «рыбий глаз».
Было бы интересно улучшить эту идею, используя менее отражающую бумагу, чтобы уменьшить блики и попытаться сделать шов на экваторе менее заметным.
 Сферические картинки: Сферические aэропанорамы, фотографии и 360° виртуальные туры самых красивых городов и уголков нашей планеты, 360° панорамы вокруг света
Сферические картинки: Сферические aэропанорамы, фотографии и 360° виртуальные туры самых красивых городов и уголков нашей планеты, 360° панорамы вокруг света