ПЗС или КМОП матрица – “муки выбора”?
Существуют два вида матриц — CCD (ПЗС) и CMOS (КМОП).
Что же это значит и в чем отличие?
CCD и CMOS сенсоры были изобретены в 1960–1970х годах, и они пришли на смену электронно-лучевым видиконам. CCD сенсоры изначально стали доминирующими на рынке, они были нацелены на использование в научных исследованиях (равно как, и в промышленности, и медицине) и позволяли достичь превосходного качества изображения, соответствующего уровню технологий того времени. Полупроводниковые производства просто не могли «раскрыть» все возможности CMOS сенсоров на то время. Вновь интерес к производству CMOS возник в 90-х годах, так как была выявлена необходимость массового производства матриц с меньшим энергопотреблением и меньшей ценой.
В CCD сенсоре свет, который попадает на пиксель, изменяет его «электрическое» состояние. «Информация» об этом передаётся только через один выходной канал (реже — два). Далее происходит конвертация в уровень напряжения, проходит процедура буферизации и подача на выходе — как аналоговый электрический сигнал.
CMOS сенсоры благодаря технологии производства уже включают в себя усилители и АЦП, соответственно процедура получения изображения позволяет достичь гораздо большей скорости чтения.
Все это сказывается на общем методе получения изображения — технология CCD позволяет проводить считывание только с одного канала или максимум двух (и это является «бутылочным горлышком» данной технологии). Тогда как в CMOS сенсоре цифровые усилители используются в каждом отдельном пикселе (на данный момент в CMOS сенсорах могут использоваться 8 и 16 канальное считывание). Казалось бы, отдельное считывание каждого пикселя должно занимать больше времени, но так как процессы считывания в CMOS сенсорах происходят параллельно, это позволяет им достичь большей пропускной способности по сравнению с CCD сенсорами.
Источник изображения: dslrclub. ru
ru
Это можно сравнить с дорогой CCD представляет собой хорошую, но двух полосную автомагистраль, в то время как CMOS сенсоры можно сравнить с восьми или даже 16 полосным шоссе.
У каждой из технологий есть и свои особенности
— CCD сенсоры имеют лучшую светочувствительность и меньше подвержены «цифровому шуму» (дефект изображения, при котором видны пиксели случайного цвета и яркости) так как размер пикселя, как правило, больше, потому что в камерах, использующих CMOS сенсоры, сложная электронная схема уменьшает размер пикселя. Как результат — некоторое количество света попадает не на светочувствительные фотодиоды. Именно поэтому при съемке с малым количеством света рекомендованы камеры, использующие CCD сенсоры.
Но тут, следует отметить, что еще в 2009 году, компания Sony презентовала технологию т.н. «обратной подсветки». Вследствие этого, CMOS сенсоры стали гораздо более эффективны при съемке со слабым освещением и/или малоконтрастных объектов. И на текущий момент данный недостаток CMOS сенсоров был практически нивелирован.
И на текущий момент данный недостаток CMOS сенсоров был практически нивелирован.
— CCD сенсоры требуют более сложной электронной схемы сопровождения и, как следствие, это выходит в более высокую стоимость готового изделия с их использованием.
— Энергопотребление CCD сенсоров по некоторым расчётам превышает таковое у CMOS сенсоров вплоть до 100 раз! (именно благодаря низкому энергопотреблению и более компактному размеру CMOS сенсоров они стали основными на потребительском рынке. Например, все камеры в современных мобильных телефонах и планшетах используют CMOS сенсоры). А более высокое энергопотребление может привести к проблемам тепловыделения, которое не только негативно влияет на изображение, но так же может еще больше увеличить стоимость готового изделия (из-за применения специализированного охлаждения).
— В сенсорах CMOS благодаря технологии индивидуального «чтения» каждого пикселя возможна работа т.н. «окна», которое позволяет выделить определённую часть сенсора (изображения) для считывания вместо всей области сенсора сразу. Это позволяет достичь высокой скорости съемки в выделенной области (по сравнению с CCD).
Это позволяет достичь высокой скорости съемки в выделенной области (по сравнению с CCD).
— В разных типах сенсоров используются различные экспозиционные принципы: CCD используют Global shutter, а в CMOS — Rolling Shutter технологий (более подробно, мы рассмотрим эту тему в отдельной статье).
Следовательно, беря во внимание все вышесказанное, если Вам:
Необходима высокая скорость съемки — Вам необходимы камеры с CMOS сенсорами.
Необходима высокая светочувствительность — Вам необходимы камеры с CCD сенсорами (либо CMOS с технологией «обратной подсветки»).
Необходимо малое количество «цифрового шума» — Вам необходимы камеры с CCD сенсорами.
Необходимо чуть более дешёвое решение — Вам необходимы камеры с CMOS сенсорами.
Подводя итог, следует отметить тот факт, что в любом случае выбор камеры должен зависеть именно от сферы применения, а не только исходя из технических характеристик.
Наши специалисты помогут подобрать камеру именно под Ваши нужды!
Эксперт Sony Александр Бахтурин делает обзор матриц. Часть 2
Александр Бахтурин
Преподаватель отдела маркетинга, эксперт компании Sony
Продолжение материала. Начало (часть 1) читайте здесь.
Помню, как сквозь шесть-восемь рядов людей, окружавших в первый день фотовыставки стенд Canon весной 2002 года, прорывались к стендистам два седых профессора-физика: «Ребята, в новых каталогах везде ошибка! Там написано, что сенсор «комоп», а этого не может быть, там же «пэ-зэ-эс»! Передайте японцам, у вас где-то неправильно перевели и теперь все повторяют ошибку! ПЗС — это сенсор цифровых камер, а КМОП — это так, ячейка врЕменной памяти, она не способна фиксировать заряд!» — «Уважаемые, это не ошибка, это действительно так, но осталось одно название КМОП, а внутри — всё изменено и работает по-другому». — «Да вы с кем, сопляки, разговариваете! Да нам лучше знать, что и как может работать! Вы ошиблись, вы необразованные пентюхи! Немедленно зовите главного японца!» Слава Богу, что рядом были два выпускника физфака — из МГУ и МИРЭА.
КМОП/CMOS
CMOS — complementary metal-oxide-semiconductor — переводится, как комплементарная структура металл-оксид-полупроводник, то есть с дополняющими друг друга полупроводниками. Накапливаемый заряд считывается с каждого пикселя индивидуально. Изначально в 1963 году КМОП-матрицу придумал Фрэнк Вонлас из компании Fairchild, но длительное время развивавшаяся технология ПЗС «отбивала желание» думать в этом направлении.
Отсюда удивление многих фотографов тем, что в современных цифровых камерах сенсор может быть не закрыт от света затвором, например, при смене оптики. Зато у него появляется множество дополнительных возможностей. Недостаток в изначальной медленности процессов, сложности производства, в окружённости фотодатчика огромным количеством управляющих элементов.
Только когда к 1990 году стало ясно, что при больших сенсОрных массивах происходит рассеивание энергии заряда, а перегревом микросхемы стало трудно управлять, технология КМОП «всплыла» в поле зрения исследователей.
Приведу такое сравнение. ПЗС-матрица подобна площади, заставленной чашками, в которые падают дождевые капли; накопившаяся влага переливается линейно в соседние чашки. И так она достигает самого края площади, где все собирается в большой емкости, где и взвешивается. КМОП-сенсор не собирает воду, а сразу пропускает в трубку, в которой стоит турбина, скорость вращения которой и сообщает о количестве воды.
В начале 2000-х годов совершенно неожиданно появилось немалое количество фотоохотников за «дУхами и призраками», которые неожиданно возникали на снимках. На изображении появлялись «из ниоткуда» посторонние полупрозрачные предметы, что-то смутно напоминающие. Или вдруг жаждущий консультации заявлял, что желает «фотографировать объекты в ультрафиолете» — в действительности он искал метод съёмки «потустороннего». Но образования не хватает, и он называет инфракрасную съёмку … ультрафиолетовой.
Было замечено, что любая «грязь» — это пыль, тонкослойные жировые покрытия, влага на поверхности передней линзы объектива, и все это моментально вызывает усиленное образование «артефактов». Я едва не стал «иконой стиля» в подобной мистической съёмке, применив на деле простые методы из арсенала портретной и научной фотографии: тонкие стёкла, плёнки и полупропускающие зеркала. Конечно, тут же разоблачил сам себя и вызвал волну недовольства… На самом деле, для основной массы фотографов причин было три: неумение фотографировать; использование дешёвой, непросветлённой и плохо чернёной оптики без защитных светофильтров в контровом и боковом свете; и основная — несовершенство тогдашних сенсоров и процессоров дешёвых цифровых фотокамер.
Я едва не стал «иконой стиля» в подобной мистической съёмке, применив на деле простые методы из арсенала портретной и научной фотографии: тонкие стёкла, плёнки и полупропускающие зеркала. Конечно, тут же разоблачил сам себя и вызвал волну недовольства… На самом деле, для основной массы фотографов причин было три: неумение фотографировать; использование дешёвой, непросветлённой и плохо чернёной оптики без защитных светофильтров в контровом и боковом свете; и основная — несовершенство тогдашних сенсоров и процессоров дешёвых цифровых фотокамер.
При получении «ghosts» на фотоплёнке последняя причина (несовершенство тогдашних сенсоров и процессоров…) заменялась уймой оптических и «химических» проблем при фотопечати. Сенсор бликовал сам по себе, ослеплялся переотражениями от плохого объектива, сдваивал и страивал сигнал. Первые простые CMOS не были защищены от статического электричества, и возникали подобия наложений перевёрнутых элементов изображения, когда они неожиданно из буфера ещё раз (!) сбрасывались в процессор. К тому же и программное обеспечение процессора не было совершенным.
К тому же и программное обеспечение процессора не было совершенным.
Субмикронная фотолитография, замена кремниевой подложки на алюминиевую, а затем медную, реализация в 1993 году фототранзисторной технологии Active Pixel Sensors с усилителями сигналов, изобретение компанией Sony технологии Exmor в 2008 году — все это сделало КМОП основой современной цифровой фотографии.
Внутри каждого пикселя, под сенсорной поверхностью, расположен усилитель сигнала, ряд преобразователей и ускорителей, передающих уже цифровой сигнал в процессор. При этом важнейшая особенность КМОП — это возможность одновременного полнокадрового прогрессивного считывания всей информации. Считывание не нуждается в накоплении заряда «от соседей», и происходит индивидуально, что открыло возможности зонального считывания, зонального подавления шумов и прочего. Информация собирается в картинку в процессоре.
Теперь, когда при ручной фокусировке мы видим увеличенную в 8-10 раз запрошенную зону изображения, остальные при этом не читаются. Цепочки усиления, буферы и делители позволяют получить сигнал, достаточный для выполнения в каждом пикселе или группе ряда аналитических задач: экспонометрии, баланса белого, фазовой и контрастностной фокусировки.
Цепочки усиления, буферы и делители позволяют получить сигнал, достаточный для выполнения в каждом пикселе или группе ряда аналитических задач: экспонометрии, баланса белого, фазовой и контрастностной фокусировки.
Структура матрицы Sony Exmor
Матрицы Exmor, производство которых компания Sony начала в 2007 году, позволили построить слоистые оптимизированные структуры, но имели лишние поддерживающие элементы и проводники перед ячейкой (такие назывались front light). В 2009 году вышла матрица BSI-Exmor-RS с «задней подсветкой», её «рабочий отрезок» от микролинзы до пикселя уменьшен втрое, ходу луча света ничто не препятствует, а расстояние до «соседа» отсутствует — даже микролинзы плавно переходят друг в друга. Все вспомогательные и управляющие структуры каждого пикселя убраны в нижние слои, уже из 5 или 7.
Стало возможным увеличить диаметр датчика. Чувствительность и динамический диапазон обогнали ПЗС. А нагрев? Поскольку аналоговый сигнал тут же преобразуется в каждом пикселе в цифровой, нагрев отсутствует. Кроме того, как отмечалось выше, основное время КМОП сенсор ждёт, а значит, охлаждается, чему способствует металлическая подложка.
Кроме того, как отмечалось выше, основное время КМОП сенсор ждёт, а значит, охлаждается, чему способствует металлическая подложка.
Современные CMOS-сенсоры, в отличие от CCD, построены по слоёной схеме и похожи на этажерку.
Сверху – антимуаровый фильтр. Возможно, вскоре он будет встроен в микролинзу и станет отключаемым произвольно или по команде процессора.
Под антимуаровым фильтром расположены микролинзы переменной формы.
Еще ниже — сам фотодиод. В зависимости от положения (чем ближе к краю или углу), тем более он сдвигается от оси микролинзы в ту точку, в которую упадёт сфокусированный луч.
Под чувствительной поверхностью расположен модуль, который компания Sony называет DRAM. Это пять (у телефонов с BCI-CMOS – меньше) этажей из аналогово-цифрового преобразователя, буфера, системы сжатия и цепочки ускорителей (3-20 раз) передачи информационных пакетов по шине данных в LSI – линейный системный интегратор, расположенный перед процессором Sony BIONZ. Ниже — медная и кремниевая подложки сенсора.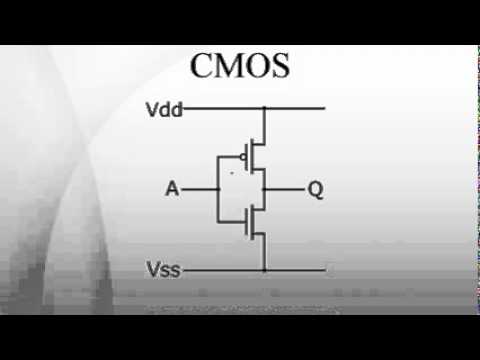
Линейный системный интегратор разбирает информацию «по полочкам». В один канал уходит изобразительная информация, в другие два — данные фазового и контрастностного сигнала фокусировки, в следующий — экспозиционная информация, ещё в один — о цвете и его балансе. Эти потоки вливаются в процессор для обработки, почти моментальной. LSI — единственный элемент системы, который греется и нуждается в охлаждении с помощью теплорассеивающей рамы фотоаппарата.
Основные типы CMOS-сенсоров Sony
В результате развития технологии выделилось два типа КМОП-сенсора — с большим количеством мегапикселей (при этом их диаметр мал) и с малой «мегапиксельностью». В первом случае камера создаёт огромный файл, который можно обрабатывать и кадрировать (бывали случаи успешной обработки 1/35 площади малоформатного кадра), и останется достаточно для печати выставочного отпечатка. Во втором случае файл меньше, но пиксели настолько огромные и чувствительные, что динамический диапазон оказывается огромным и позволяет снимать при явных дисбалансах яркости или серьёзном недостатке света. Последние хороши для видосъёмки. Собственно, для неё и создавались.
Последние хороши для видосъёмки. Собственно, для неё и создавались.
Произошла ещё одна интересная конверсия: видеосенсор, использовавшийся научным подразделением Sony для непрерывной видеофиксации физических процессов в пузырьковой камере ускорителей элементарных частиц был доработан и превращён в великолепный однодюймовый сенсор для компактных и спортивных камер Sony серии RX!
МОС/Live-MOS
Сенсоры, разработанные компанией Matsushita, применяются в камерах Panasonic и Olympus. Гениальная оптимизация ПЗС позволила уменьшить потери электронов при регистровой передаче. Появилась возможность прогрессивного сканирования изображения, но сигнал от сенсора в процессор идёт аналоговый. Подобные сенсоры очень хороши для видеосъёмки.
Квантовые точки/QuantumFilm
Это — технология будущего. В отличие от огромного (в понятиях микромира) размера современного сенсора, квантовая точка близка к размерам атома. Из них в стеклоподобном носителе собираются градиентные многослойные наноплёнки. Каждая точка — это помещённый в полупроводнике кристалл хлорида меди или вообще только двумерный «электронный газ». Квантовая точка может как поглощать (технология QDSC), так и излучать (QD-LED) фотоны.
Каждая точка — это помещённый в полупроводнике кристалл хлорида меди или вообще только двумерный «электронный газ». Квантовая точка может как поглощать (технология QDSC), так и излучать (QD-LED) фотоны.
Продолжение материала (часть 3) читайте здесь.
Сравнение CMOS И CCD в Видеонаблюдение
Сенсоры CCD и CMOS последние несколько лет находятся в состоянии непрерывного соперничества. В данной статье мы постараемся рассмотреть преимущества и недостатки данных технологий. ПЗС-матрица (сокр. от «прибор с зарядовой связью») или CCD-матрица (сокр. от англ. CCD, «Charge-Coupled Device») — специализированная аналоговая интегральная микросхема, состоящая из светочувствительных фотодиодов, выполненная на основе кремния, использующая технологию ПЗС — приборов с зарядовой связью. В CCD-сенсоре, свет (заряд), падающий на пиксель сенсора, передается от микросхемы через один выходной узел, или через всего лишь несколько выходных узлов. Заряды преобразуются в уровень напряжения, накапливаются и рассылаются как аналоговый сигнал. Этот сигнал затем суммируется и преобразуется в числа аналого-цифровым преобразователем, вне сенсора. КМОП (комплементарная логика на транзисторах металл-оксид-полупроводник; КМДП; англ. CMOS, Complementary-symmetry/metal-oxide semiconductor) — технология построения электронных схем. На ранней стадии, обычные CMOS-чипы использовались для отображения, однако качество картинки было низким, в связи с низкой световой чувствительностью КМОП-элементов. Современные CMOS-сенсоры изготавливаются по более специализированной технологии, что привело к стремительному росту качества изображения и светочувствительности за последние годы. CMOS-чипы обладают рядом преимуществ. В отличие от CCD-сенсоров, CMOS-сенсоры содержат в себе усилители и аналого-цифровые преобразователи, что значительно снижает стоимость конечного продукта, т.к. он уже содержит все необходимые элементы для получения изображения. Каждый CMOS-пиксель содержит электронные преобразователи. CMOS-сенсоры обладают большим функционалом и более широкими возможностями интеграции.
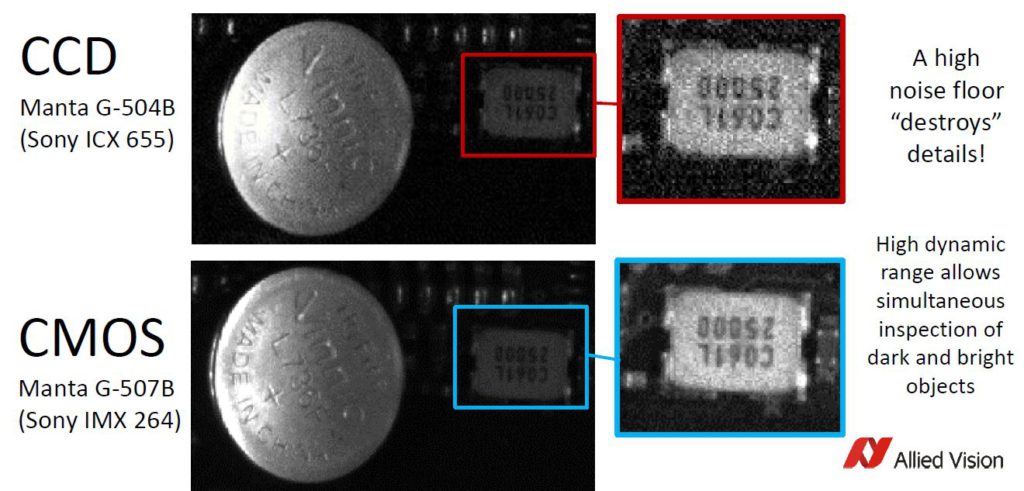
Этот сигнал затем суммируется и преобразуется в числа аналого-цифровым преобразователем, вне сенсора. КМОП (комплементарная логика на транзисторах металл-оксид-полупроводник; КМДП; англ. CMOS, Complementary-symmetry/metal-oxide semiconductor) — технология построения электронных схем. На ранней стадии, обычные CMOS-чипы использовались для отображения, однако качество картинки было низким, в связи с низкой световой чувствительностью КМОП-элементов. Современные CMOS-сенсоры изготавливаются по более специализированной технологии, что привело к стремительному росту качества изображения и светочувствительности за последние годы. CMOS-чипы обладают рядом преимуществ. В отличие от CCD-сенсоров, CMOS-сенсоры содержат в себе усилители и аналого-цифровые преобразователи, что значительно снижает стоимость конечного продукта, т.к. он уже содержит все необходимые элементы для получения изображения. Каждый CMOS-пиксель содержит электронные преобразователи. CMOS-сенсоры обладают большим функционалом и более широкими возможностями интеграции. Одной из основных проблем при использовании CMOS-матриц в видеокамерах было качество изображения. CCD-матрицы обеспечивали и обеспечивают сейчас более низкий шумовой уровень. В результате CMOS-чипы чрезвычайно плохо вели себя при низкой освещенности, по сравнению с CCD-чипами. И поскольку низкая освещенность — одна из основных трудностей при видеосъемке, это было главным барьером для использования CMOS-матриц. Однако, опыт производства, накопленный за годы развития CMOS, позволил с каждым новым поколением этих сенсоров существенно снижать фиксированные и случайные шумы, влияющие на качество картинки. Еще одно слабое место CMOS — искажения, появляющиеся при захвате динамического изображения вследствие слабой чувствительности сенсора. Изображения автомобилей могут содержать очень яркие элементы, такие как фары, солнце, а также очень темные участки, например, на номерных знаках. По этой причине для обработки сцен с большими контрастными перепадами необходим широкий динамический диапазон. ПЗС-сенсор обладает хорошими параметрами динамического диапазона, однако предусмотренный в КМОП доступ к отдельным пикселям, дает куда больше возможностей для получения лучшего динамического диапазона.
Одной из основных проблем при использовании CMOS-матриц в видеокамерах было качество изображения. CCD-матрицы обеспечивали и обеспечивают сейчас более низкий шумовой уровень. В результате CMOS-чипы чрезвычайно плохо вели себя при низкой освещенности, по сравнению с CCD-чипами. И поскольку низкая освещенность — одна из основных трудностей при видеосъемке, это было главным барьером для использования CMOS-матриц. Однако, опыт производства, накопленный за годы развития CMOS, позволил с каждым новым поколением этих сенсоров существенно снижать фиксированные и случайные шумы, влияющие на качество картинки. Еще одно слабое место CMOS — искажения, появляющиеся при захвате динамического изображения вследствие слабой чувствительности сенсора. Изображения автомобилей могут содержать очень яркие элементы, такие как фары, солнце, а также очень темные участки, например, на номерных знаках. По этой причине для обработки сцен с большими контрастными перепадами необходим широкий динамический диапазон. ПЗС-сенсор обладает хорошими параметрами динамического диапазона, однако предусмотренный в КМОП доступ к отдельным пикселям, дает куда больше возможностей для получения лучшего динамического диапазона.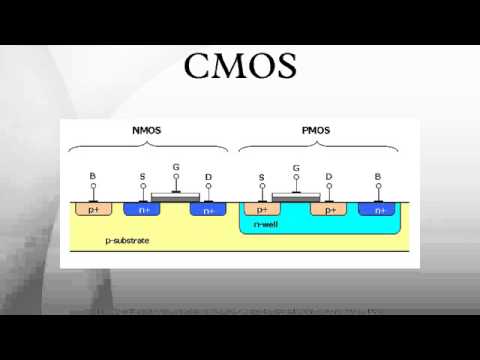 Также при использовании CCD-матриц яркие пятна сцены могут создавать вертикальные линии на картинке и мешать распознаванию номерного знака из-за выцветания и смазывания. Несмотря на то что CCD-матрицы имеют более высокую характеристику чувствительности, основным фактором, ограничивающим их применение, является низкая скорость считывания заряда и, как следствие, невозможность обеспечения высокой скорости формирования изображения. Чем выше разрешение матрицы, тем ниже скорость формирования изображения. В свою очередь, технология CMOS, объединяющая светочувствительный элемент и микросхему обработки, позволяет получать высокую скорость формирования кадра даже для 3 Мп сенсоров. Однако использование мегапиксельных CMOS-сенсоров для IP-камер систем видеонаблюдения требует эффективного сжатия потока данных. Наиболее распространенными алгоритмами компрессии в IP CCTV в настоящее время являются M-JPEG, MPEG4 и H.264. Первый нередко реализуется непосредственно на CMOS-сенсоре самим производителем матрицы.
Также при использовании CCD-матриц яркие пятна сцены могут создавать вертикальные линии на картинке и мешать распознаванию номерного знака из-за выцветания и смазывания. Несмотря на то что CCD-матрицы имеют более высокую характеристику чувствительности, основным фактором, ограничивающим их применение, является низкая скорость считывания заряда и, как следствие, невозможность обеспечения высокой скорости формирования изображения. Чем выше разрешение матрицы, тем ниже скорость формирования изображения. В свою очередь, технология CMOS, объединяющая светочувствительный элемент и микросхему обработки, позволяет получать высокую скорость формирования кадра даже для 3 Мп сенсоров. Однако использование мегапиксельных CMOS-сенсоров для IP-камер систем видеонаблюдения требует эффективного сжатия потока данных. Наиболее распространенными алгоритмами компрессии в IP CCTV в настоящее время являются M-JPEG, MPEG4 и H.264. Первый нередко реализуется непосредственно на CMOS-сенсоре самим производителем матрицы. Алгоритмы MPEG4 и H.264 – более эффективные, но требуют мощного процессора. Для формирования потока реального времени с разрешением более 2 мегапикселей в CMOS IP-камерах используются сопроцессоры, обеспечивающие дополнительные вычисления. В настоящее время IP-камеры на основе CMOS-сенсоров становятся все популярнее в первую очередь благодаря поддержке технологии со стороны лидеров IP видеонаблюдения. При этом их стоимость выше, чем аналогичных камер на CCD. И это несмотря на то, что технология CMOS, объединяющая аналоговую и цифровую части устройства, позволяет создавать более дешевые камеры. Ситуация такова, что сегодня стоимость IP-камеры определяется ее возможностями и характеристиками. Принципиальным является не тип матрицы, а программное обеспечение, реализуемое процессором камеры.
Алгоритмы MPEG4 и H.264 – более эффективные, но требуют мощного процессора. Для формирования потока реального времени с разрешением более 2 мегапикселей в CMOS IP-камерах используются сопроцессоры, обеспечивающие дополнительные вычисления. В настоящее время IP-камеры на основе CMOS-сенсоров становятся все популярнее в первую очередь благодаря поддержке технологии со стороны лидеров IP видеонаблюдения. При этом их стоимость выше, чем аналогичных камер на CCD. И это несмотря на то, что технология CMOS, объединяющая аналоговую и цифровую части устройства, позволяет создавать более дешевые камеры. Ситуация такова, что сегодня стоимость IP-камеры определяется ее возможностями и характеристиками. Принципиальным является не тип матрицы, а программное обеспечение, реализуемое процессором камеры.
Преимущества CCD матриц: Низкий уровень шумов, высокий коэффициент заполнения пикселов (около 100%), высокая эффективность (отношение числа зарегистрированных фотонов к их общему числу, попавшему на светочувствительную область матрицы, для CCD — 95%), высокий динамический диапазон (чувствительность), хорошая чувствительность в IR-диапазоне.
Недостатки CCD матриц: Сложный принцип считывания сигнала, а следовательно и технология, высокий уровень энергопотребления (до 2-5Вт), дороже в производстве.
Преимущества CMOS матриц: Высокое быстродействие (до 500 кадров/с), низкое энергопотребление (почти в 100 раз по сравнению с CCD), дешевле и проще в производстве, перспективность технологии (на том же кристалле в принципе ничего не стоит реализовать все необходимые дополнительные схемы: аналого-цифровые преобразователи, процессор, память, получив, таким образом, законченную цифровую камеру на одном кристалле).
Недостатки CMOS матриц: Низкий коэффициент заполнения пикселов, что снижает чувствительность (эффективная поверхность пиксела ~75%,остальное занимают транзисторы), высокий уровень шума (он обусловлен так называемыми темповыми токами — даже в отсутствие освещения через фотодиод течет довольно значительный ток) борьба с которым усложняет и удорожает технологию, невысокий динамический диапазон.
Как и любая технология, технологии CMOS и CCD обладают преимуществами и недостатками, которые мы постарались рассмотреть в данной статье. При выборе камер необходимо учитывать все плюсы и минусы данных технологий, обращая внимание на такие параметры как светочувствительность, широкий динамический диапазон, энергопотребление, уровень шума, стоимость камеры.
|
КМОП Основы |
||||||||||
| Что такое датчики изображения CMOS? CMOS (pr. SEE-moss) означает дополнительные металл-оксид-полупроводник, архитектура большинства компьютерных процессоров и модули памяти. Датчики изображения представляют собой кремниевые чипы, которые захватывают и считывают легкий. Высокопроизводительные датчики изображения CMOS используют активный пиксель архитектуры, изобретенные в Лаборатории реактивного движения НАСА в середине 1990-е.  Они могут выполнять функции камеры на кристалле. Они могут выполнять функции камеры на кристалле.
ПЗС и КМОП ИЗОБРАЖЕНИЕ
ДАТЧИКИ
|
||||||||||
|
|
||||||||||
|
ПЗС-датчики изображения Приборы с зарядовой связью (ПЗС)
захватить свет на маленькие фотосайты на их поверхности и получить их название
от того, как этот заряд читается после воздействия.
С КД технологии сейчас около 25 лет. Используя специализированный процесс СБИС, образуется очень плотная сетка из поликремниевых электродов. поверхность чипа. Они настолько малы и близки, что человек пакеты электронов могут оставаться нетронутыми, пока они физически перемещаются от места, где был обнаружен свет, по всей поверхности чип, к выходному усилителю. Для этого используется сетка электродов. тактируется внешним источником. Технически возможно, но экономически невыгодно использовать процесс ПЗС для
интегрировать другие функции камеры, такие как драйверы часов, логика синхронизации,
обработка сигналов и т. д. Поэтому они обычно реализуются в
вторичные чипы. Таким образом, большинство ПЗС-камер содержат несколько микросхем, часто
не менее 8 и не менее 3. Помимо необходимости интеграции
другая электроника камеры в отдельном чипе, ахиллесова пята всего
CCD — это требование к часам.
Датчики изображения CMOS Датчики изображения изготавливаются на пластинах
литейные цеха или фабрики.
Пассивный и Датчики с активными пикселямиСуществует два основных типа изображений CMOS. датчики пассивные и активные.
Недорогие микросхемы CMOS используются в
недорогие цифровые фотоаппараты.
Факты о датчике изображения CMOSВот некоторые вещи, которые вы, возможно, хотели бы знать о датчиках изображения CMOS:
Качество любого цифрового изображения,
независимо от того, распечатаны они или отображены на экране, частично зависит от числа
пикселей он содержит. |
 Это дает им
принципиально схожие свойства чувствительности в видимом и ближнем ИК
спектр. Таким образом, обе технологии преобразуют падающий свет (фотоны) в
электронный заряд (электроны) в результате того же процесса фотопреобразования.
Обе технологии могут поддерживать две разновидности фотоэлемента — фотозатвор.
и фотодиод. Как правило, фотодиодные датчики более чувствительны,
особенно к синему свету, и это может быть важно при создании цвета.
камеры. ST производит только датчики изображения CMOS на основе фотодиодов. Датчики цвета
может быть изготовлен одинаково по обеим технологиям; обычно с покрытием
каждый отдельный пиксель с цветом фильтра (например, красный, зеленый, синий).
Это дает им
принципиально схожие свойства чувствительности в видимом и ближнем ИК
спектр. Таким образом, обе технологии преобразуют падающий свет (фотоны) в
электронный заряд (электроны) в результате того же процесса фотопреобразования.
Обе технологии могут поддерживать две разновидности фотоэлемента — фотозатвор.
и фотодиод. Как правило, фотодиодные датчики более чувствительны,
особенно к синему свету, и это может быть важно при создании цвета.
камеры. ST производит только датчики изображения CMOS на основе фотодиодов. Датчики цвета
может быть изготовлен одинаково по обеим технологиям; обычно с покрытием
каждый отдельный пиксель с цветом фильтра (например, красный, зеленый, синий).  Для начала обвинения
в первой строке передаются в считываемый регистр .
Оттуда сигналы затем подаются на усилитель, а затем на аналого-цифровой
преобразователь . Как только строка прочитана, ее заряды на считываемом
строка регистра удаляется. Затем следующая строка поступает в регистр считывания,
и все ряды выше маршируют вниз на один ряд. Заряды в каждой строке
«связаны» с теми, что находятся в строке выше, поэтому, когда кто-то движется вниз,
следующий перемещается вниз, чтобы заполнить свое старое место. Таким образом, каждая строка может быть
readone строки за раз.
Для начала обвинения
в первой строке передаются в считываемый регистр .
Оттуда сигналы затем подаются на усилитель, а затем на аналого-цифровой
преобразователь . Как только строка прочитана, ее заряды на считываемом
строка регистра удаляется. Затем следующая строка поступает в регистр считывания,
и все ряды выше маршируют вниз на один ряд. Заряды в каждой строке
«связаны» с теми, что находятся в строке выше, поэтому, когда кто-то движется вниз,
следующий перемещается вниз, чтобы заполнить свое старое место. Таким образом, каждая строка может быть
readone строки за раз. 
 Амплитуда и форма часов имеют решающее значение
к успешной эксплуатации. Создание часов правильного размера и формы
обычно это функция специализированной микросхемы драйвера часов, что приводит к двум
основные недостатки; несколько нестандартных напряжений питания и высокая мощность
потребление. Нередко для ПЗС требуется 5 или 6 различных
поставки на критических и неясных значениях. Если пользователю предлагается простой
один вход питания, тогда будет использоваться несколько регуляторов
внутренне для создания этих потребностей в поставках. С положительной стороны,
ПЗС созрели для обеспечения превосходного качества изображения с низким уровнем шума.ПЗС
процессы, как правило, подчиняются основным производителям.
Амплитуда и форма часов имеют решающее значение
к успешной эксплуатации. Создание часов правильного размера и формы
обычно это функция специализированной микросхемы драйвера часов, что приводит к двум
основные недостатки; несколько нестандартных напряжений питания и высокая мощность
потребление. Нередко для ПЗС требуется 5 или 6 различных
поставки на критических и неясных значениях. Если пользователю предлагается простой
один вход питания, тогда будет использоваться несколько регуляторов
внутренне для создания этих потребностей в поставках. С положительной стороны,
ПЗС созрели для обеспечения превосходного качества изображения с низким уровнем шума.ПЗС
процессы, как правило, подчиняются основным производителям.  Вместо этого было много странных и необычных способов быть
исследованы для хранения данных во время манипулирования ими. Одна форма
на самом деле использовали люминофорное покрытие на экране дисплея
монитор и записывал данные на экран одним лучом света и
перечитайте его с другим. Однако в то время чаще всего
используемой технологией была пузырьковая память. В Bell Labs (где пузырь
была изобретена память), затем они придумали ПЗС как способ
хранить данные в 1969. Два ученых из Bell Labs, Уиллард Бойл и
Джордж Смит «начал перебрасывать идеи», в
словами, «и изобрел приборы с зарядовой связью за час. Да,
это было необычно, как лампочка
продолжается.» С тех пор эта «лампочка»
достигло далеко и широко. Вот некоторые основные моменты:
Вместо этого было много странных и необычных способов быть
исследованы для хранения данных во время манипулирования ими. Одна форма
на самом деле использовали люминофорное покрытие на экране дисплея
монитор и записывал данные на экран одним лучом света и
перечитайте его с другим. Однако в то время чаще всего
используемой технологией была пузырьковая память. В Bell Labs (где пузырь
была изобретена память), затем они придумали ПЗС как способ
хранить данные в 1969. Два ученых из Bell Labs, Уиллард Бойл и
Джордж Смит «начал перебрасывать идеи», в
словами, «и изобрел приборы с зарядовой связью за час. Да,
это было необычно, как лампочка
продолжается.» С тех пор эта «лампочка»
достигло далеко и широко. Вот некоторые основные моменты:

 Здесь крошечные схемы и устройства выгравированы на
кремниевые чипсы. Самая большая проблема с ПЗС в том, что их недостаточно.
экономия от масштаба. Они создаются в литейных цехах с использованием специализированных и
дорогие процессы, которые можно использовать только для изготовления ПЗС. Между тем более
и более крупные литейные заводы через улицу используют другой процесс
позвонил Комплементарный оксид металла-полупроводник (CMOS) к
сделать миллионы чипов для компьютерных процессоров и памяти. это далеко
самый распространенный и высокопроизводительный процесс в мире. Последняя КМОП
процессоры, такие как Pentium III, содержат почти 10 миллионов активных
элементы. Используя тот же процесс и то же оборудование для производителя CMOS
датчики изображения значительно сокращают расходы, поскольку фиксированные затраты на
завод распространяется на гораздо большее количество устройств.
Здесь крошечные схемы и устройства выгравированы на
кремниевые чипсы. Самая большая проблема с ПЗС в том, что их недостаточно.
экономия от масштаба. Они создаются в литейных цехах с использованием специализированных и
дорогие процессы, которые можно использовать только для изготовления ПЗС. Между тем более
и более крупные литейные заводы через улицу используют другой процесс
позвонил Комплементарный оксид металла-полупроводник (CMOS) к
сделать миллионы чипов для компьютерных процессоров и памяти. это далеко
самый распространенный и высокопроизводительный процесс в мире. Последняя КМОП
процессоры, такие как Pentium III, содержат почти 10 миллионов активных
элементы. Используя тот же процесс и то же оборудование для производителя CMOS
датчики изображения значительно сокращают расходы, поскольку фиксированные затраты на
завод распространяется на гораздо большее количество устройств. В
датчики CMOS с пассивными пикселями, фотосайт преобразует фотоны в
электрический заряд. Затем этот заряд снимается с датчика и
усиленный. Эти датчики маленькие, достаточно большие для
фотосайты и их связи. Проблема с этими датчиками
шум, который появляется как фоновый узор на изображении. Чтобы отменить
этого шума датчики часто используют дополнительные этапы обработки.
В
датчики CMOS с пассивными пикселями, фотосайт преобразует фотоны в
электрический заряд. Затем этот заряд снимается с датчика и
усиленный. Эти датчики маленькие, достаточно большие для
фотосайты и их связи. Проблема с этими датчиками
шум, который появляется как фоновый узор на изображении. Чтобы отменить
этого шума датчики часто используют дополнительные этапы обработки.
 Существует консенсус в отношении того, что, хотя эти устройства могут
доминировать на рынке бюджетных камер, более дорогие активные пиксели
датчики станут доминирующими в нишах.
Существует консенсус в отношении того, что, хотя эти устройства могут
доминировать на рынке бюджетных камер, более дорогие активные пиксели
датчики станут доминирующими в нишах. 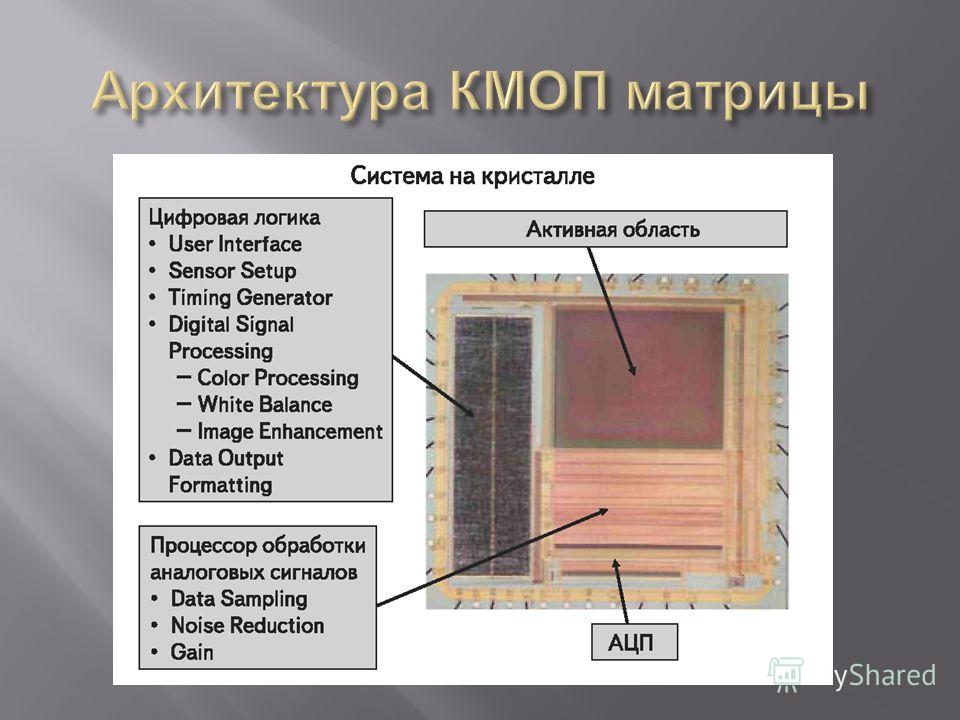 Эти функции включают защиту от джиттера (изображение
стабилизация) и сжатие изображения. Это не только делает
камера меньше, легче и дешевле; это также требует меньше энергии, поэтому
батареи служат дольше. Технически это возможно, но не
экономично использовать производственный процесс ПЗС для интеграции других
функции камеры, такие как драйверы часов, логика синхронизации и
обработка на том же чипе, что и фотосайты. Обычно такие ставят
на отдельных чипах, поэтому ПЗС-камеры содержат несколько чипов, часто столько же
8 и не менее 3.
Эти функции включают защиту от джиттера (изображение
стабилизация) и сжатие изображения. Это не только делает
камера меньше, легче и дешевле; это также требует меньше энергии, поэтому
батареи служат дольше. Технически это возможно, но не
экономично использовать производственный процесс ПЗС для интеграции других
функции камеры, такие как драйверы часов, логика синхронизации и
обработка на том же чипе, что и фотосайты. Обычно такие ставят
на отдельных чипах, поэтому ПЗС-камеры содержат несколько чипов, часто столько же
8 и не менее 3.
 хотя камеры не могут снимать 20 кадров в секунду, необходимых для
полнометражное видео.
хотя камеры не могут снимать 20 кадров в секунду, необходимых для
полнометражное видео.
 Кроме того, схема может быть уменьшена, поэтому
не покрывает такую большую площадь.
Кроме того, схема может быть уменьшена, поэтому
не покрывает такую большую площадь.  Больше и меньше пикселей добавляют детали и резкость
края.
Больше и меньше пикселей добавляют детали и резкость
края. В чем разница между CMOS, BSI CMOS и составной CMOS?
Сердцем цифровой камеры является датчик изображения, и в цифровую эпоху мы наблюдаем развитие нескольких различных типов сенсорных технологий. В большинстве современных опций используется версия технологии Complementary Metal-Oxide-Semiconductor (CMOS). Эти КМОП-чипы имеют некоторые реальные преимущества по сравнению с датчиками с зарядовой связью (ПЗС), распространенными на заре цифровой фотографии, включая улучшенную энергоэффективность и контроль нагрева. Эти улучшения проложили путь для видео 4K (и выше) в камерах со сменными объективами.
Но существует более одного типа КМОП-сенсора. И если вы покупаете новую беззеркальную камеру, вы можете быть ошеломлены различными архитектурами и не знаете, почему камеры Stacked CMOS стоят намного дороже, чем базовые модели. Читайте дальше, чтобы понять, чем отличаются различные варианты CMOS.
Читайте дальше, чтобы понять, чем отличаются различные варианты CMOS.
Различия в архитектуре
По большей части цифровые датчики построены на основе аналогичной концепции, несмотря на различия в конструкции микросхем. В имидж-сканере используются светочувствительные фотосайты и фильтр с повторяющимися узорами из красных, зеленых и синих квадратов, добавляющих цвет. В большинстве датчиков используется массив цветных фильтров (CFA) 4 на 4, называемый Bayer CFA (названный в честь его создателя), но в некоторых моделях Fujifilm используется более сложный X-Trans CFA 6 на 6.
Bayer CFA (слева) имеет простой повторяющийся рисунок четыре на четыре, а Fujifilm X-Trans (справа) использует сетку шесть на шесть для получения цветных фотографий. (Иллюстрация: Боб Эл-Грин)
Вы также можете столкнуться с датчиками Quad Bayer, типичными для смартфонов с огромным количеством пикселей, а также для экшн-камер и дронов. Эти датчики содержат большое количество пикселей (обычно 48 МП), но выдают изображения с более низким разрешением с помощью метода, называемого объединением пикселей. Эта функция также немного по-разному внедряется в датчики камеры со сменными объективами (ILC). Например, роскошная Leica M11 опирается на объединение пикселей для создания фотографий с разрешением 60MP, 36MP или 18MP.
Эта функция также немного по-разному внедряется в датчики камеры со сменными объективами (ILC). Например, роскошная Leica M11 опирается на объединение пикселей для создания фотографий с разрешением 60MP, 36MP или 18MP.
Pixel Binning объединяет меньшие пиксели Quad Bayer в более крупные группы. (Иллюстрация: Боб Эл-Грин)
Чипы CMOS отличаются от ПЗС-матриц предыдущего поколения несколькими важными особенностями. Например, КМОП-чипы считывают данные попиксельно в так называемом вращающемся электронном затворе, а не все сразу, как в ПЗС-матрицах. Но есть технические преимущества, которые заставили фотоиндустрию отказаться от ПЗС: чипы CMOS поместили свой аналого-цифровой преобразователь (АЦП) на плату вместо того, чтобы откладывать его в виде отдельного блока. Чипы также потребляют меньше энергии и выделяют меньше тепла, чем ПЗС-матрицы, что хорошо как для качества изображения при слабом освещении, так и для времени автономной работы.
CMOS, BSI CMOS и Stacked CMOS
Существует три основных типа датчиков CMOS. Базовый дизайн CMOS сегодня используется в камерах начального и среднего уровня — моделях, которые получают новейшие функции через пару поколений после того, как они появились в моделях высокого класса.
КМОП-матрица с задней подсветкой (BSI) с улучшенной конструкцией аналогична концепции обычной КМОП-матрицы, но в этих микросхемах расположение компонентов отличается. Короче говоря, фотосайты находятся дальше на кристалле, и скорость построчного считывания выше. Это изменение дает практические преимущества: вообще говоря, BSI CMOS примерно на диафрагму лучше, когда речь идет о шуме изображения. Это означает, что BSI CMOS показывает столько же шума при ISO 12800, сколько аналогичный CMOS-чип при ISO 6400. Это также означает, что камеры APS-C и Micro Four Thirds с чипами BSI работают на равных с полнокадровыми CMOS-камерами. Это не жесткие и быстрые правила, но это хорошие рекомендации, которым нужно следовать.
На этой диаграмме показаны архитектурные различия между датчиками CMOS, BSI CMOS и Stacked CMOS. (Иллюстрация: Боб Эл-Грин)
Более высокая скорость считывания делает возможным полностью электронный затвор для моделей BSI CMOS, а также обеспечивает более быструю реакцию автофокуса для более высокой скорости серийной съемки с автофокусом. Fujifilm X-T3 была первой потребительской камерой, которая действительно использовала эти функции. Он дебютировал с фокусировкой 20 кадров в секунду с полностью электронным затвором в 2018 году. Вам по-прежнему нужно использовать механический затвор, чтобы надежно заморозить движущиеся объекты с большинством CMOS-камер BSI, но бесшумный электронный затвор пригодится для портретной съемки и других неподвижных объектов.
Стекированные микросхемы CMOS продвигают концепцию BSI CMOS на шаг вперед. Они размещают компоненты в аналогичном расположении, но конструкция также объединяет процессор сигналов изображения и его сверхбыструю память DRAM в один и тот же кремний. Это делает скорость считывания еще выше. Первая массовая многослойная CMOS-камера, Sony a9 2019 года, произвела фурор, предложив возможность фотографировать без перерывов — вы можете использовать ее для съемки фотографий со скоростью 20 кадров в секунду, не теряя из виду свою сцену.
Это делает скорость считывания еще выше. Первая массовая многослойная CMOS-камера, Sony a9 2019 года, произвела фурор, предложив возможность фотографировать без перерывов — вы можете использовать ее для съемки фотографий со скоростью 20 кадров в секунду, не теряя из виду свою сцену.
Никон Z 9Датчик Stacked CMOS считывает данные достаточно быстро, чтобы исключить необходимость в механическом затворе, что является настоящим достижением для камеры, предназначенной для фиксации движущихся объектов на месте. (Фото: Джим Фишер)
Поскольку технология делает этот тип фотографии возможным, чипы Stacked CMOS стали фактическим стандартом для высококлассных ILC, которые профессионалы используют для фотографирования со стороны или пресс-ложи. Мы видели, как некоторые камеры достигают 30 кадров в секунду (Sony a1), а Nikon Z 9 справляется с 11-мегапиксельными фотографиями со скоростью 120 кадров в секунду из-за многоярусного чипа и двух процессоров. Сверхбыстрое считывание и вычислительная мощность также улучшают автофокус. Стекированные чипы теперь превосходят датчики BSI CMOS по скорости фокусировки, точности и распознаванию объектов. Все это работает вместе, чтобы гарантировать, что сложенные камеры не просто делают кучу фотографий подряд; они берут кучу в фокусе фото подряд.
Стекированные чипы теперь превосходят датчики BSI CMOS по скорости фокусировки, точности и распознаванию объектов. Все это работает вместе, чтобы гарантировать, что сложенные камеры не просто делают кучу фотографий подряд; они берут кучу в фокусе фото подряд.
Подводя итоги, можно сказать, что микросхемы CMOS являются основными, основными опциями для современных цифровых камер. Переход на модель с датчиком BSI CMOS повышает скорость считывания и улучшает качество изображения при слабом освещении. Наконец, многослойные CMOS-чипы еще больше расширяют диапазон скоростей и сохраняют идеальный обзор объекта, пока камера делает изображение.
CCD, Foveon, монохромные и полноспектральные камеры
Ранее мы коснулись CCD-датчиков. Эти чипы были стандартом для потребительских камер в нулевые, но в последние годы уступили место CMOS. У первого все еще есть сторонники, но, за исключением очень недорогих компактов, вы не видите сенсор в современных потребительских моделях.
Sigma DP2 Merrill, использованная для этой фотографии, улавливает цвета с помощью трехслойного датчика Foveon, что отличается от подхода, используемого камерами Bayer. (Фото: Джим Фишер)
Foveon — еще один тип сенсора, который используется исключительно в камерах Sigma X3, Merrill и Quattro. Чипы Foveon по-разному записывают цвет с помощью трех светочувствительных слоев, а не массива цветовых фильтров. Положительным моментом является то, что этим камерам не требуется интерполяция для заполнения отсутствующих цветов, что означает, что они могут захватывать гораздо больше деталей, чем датчик Байера с аналогичным количеством пикселей. Но есть и недостатки: приложения для обработки Raw не поддерживают файлы со многих камер Foveon, а фотографии показывают очень сильный шум при средних значениях ISO. Сегодня на рынке представлена только одна модель Foveon — Sigma dp Quattro. Мы пропустили обзор камеры, но взглянули на уже снятую с производства Quattro H, родственную модель, которая соответствует большинству ее функций, но использует датчик Foveon, который немного больше, чем APS-C.
Рекомендовано нашими редакторами
Лучшие зеркальные и беззеркальные камеры на 2022 год
Как купить лучшие объективы для зеркальных и беззеркальных камер на 2022 год
10 дополнительных советов по цифровой фотографии
В специальных камерах, таких как Leica M10 Monochrom, отсутствует массив цветных фильтров, чтобы запечатлеть мир в черно-белом цвете; Это фото в зеркале я сделал на M10M и послевоенный объектив Elmar 5cm F3.5. (Фото: Джим Фишер)
Монохромные камеры — еще один вариант. Leica предлагает несколько специальных опций, которые отказываются от массива цветных фильтров и снимают исключительно черно-белые изображения. M10 Monochrom и Q2 Monochrom мучительно дороги, но специалисты по монохромной печати могут счесть, что они того стоят. Эти камеры показывают преимущество в деталях, как и чипы Foveon, но превосходят параметры цвета при высоких значениях ISO — отключение фильтра Байера почти удваивает количество света, попадающего на датчик.
Инфракрасные камеры полного спектра не продаются в местных крупных магазинах, но они существуют. Бытовые камеры имеют фильтр над сенсором, который отсекает невидимый свет. Но такие компании, как KolariVision(Открывается в новом окне) и MaxMax(Открывается в новом окне), могут удалить этот фильтр или продать вам предварительно переделанную камеру, которая может видеть инфракрасные и ультрафиолетовые волны. Пейзажисты любят использовать эти датчики, чтобы снимать сюрреалистичные, инопланетные сцены прямо здесь, на Земле.
Камеры, преобразованные для инфракрасного, ультрафиолетового или полноспектрального изображения, захватывают световые волны с длинами волн, невидимыми для ваших глаз. (Фото: Getty / Justin Reznick Photography)
Забегая вперед, группа Sony Semiconductor Solutions Group (отдельная единица от подразделения камер) разрабатывает микросхему Stacked CMOS следующего поколения, которая меняет расположение встроенных транзисторов и обещает лучший динамический диапазон и более низкий уровень шума ISO, чем это возможно с модели текущего поколения.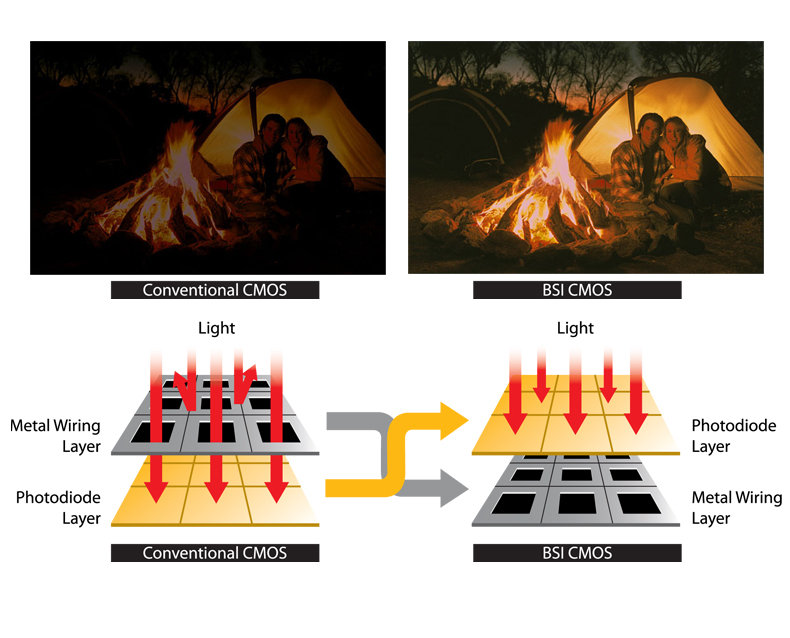 Объявление о разработке было сделано в конце 2021 года, но мы рассчитываем подождать несколько лет, прежде чем эта технология появится в камере, которую смогут купить простые смертные.
Объявление о разработке было сделано в конце 2021 года, но мы рассчитываем подождать несколько лет, прежде чем эта технология появится в камере, которую смогут купить простые смертные.
Компания Panasonic также разрабатывает датчик нового типа. Объявленная еще в 2018 году, компания работает над тем, что она называет органическим датчиком, который использует слой органической фотопроводящей пленки (OPF) вместо отдельных пикселей для сбора света.
Выбор правильной камеры
Теперь, когда вы знаете больше о датчиках, пришло время выбрать камеру. Если вы покупаете модель со сменным объективом, ознакомьтесь с нашим выбором лучших беззеркальных и лучших полнокадровых камер или прочитайте наше более общее руководство по покупке, если вы не уверены, какой тип камеры вам следует приобрести.
Нравится то, что вы читаете?
Подпишитесь на информационный бюллетень Tips & Tricks , чтобы получить советы экспертов, чтобы получить максимальную отдачу от вашей технологии.
Этот информационный бюллетень может содержать рекламу, предложения или партнерские ссылки. Подписка на информационный бюллетень означает ваше согласие с нашими Условиями использования и Политикой конфиденциальности. Вы можете отказаться от подписки на информационные бюллетени в любое время.
Спасибо за регистрацию!
Ваша подписка подтверждена. Следите за своим почтовым ящиком!
Подпишитесь на другие информационные бюллетени
Цифровая визуализация в оптической микроскопии. Введение в КМОП-сенсоры изображения
Появление твердотельных устройств формирования изображения с высоким разрешением, прежде всего устройств с зарядовой связью ( ПЗС-матрицы ) и дополнительных оксидно-металлических полупроводниковых ( КМОП-) датчиков изображения, ознаменовало собой появление новая эра оптической микроскопии, которая угрожает затмить традиционные технологии записи изображений, такие как пленка, видеотрубки и фотоумножители. Системы камер устройств с зарядовой связью, разработанные специально для применения в микроскопии, предлагаются многочисленными производителями оригинального оборудования и послепродажного обслуживания, а датчики изображения CMOS в настоящее время становятся доступными для нескольких микроскопов.
Системы камер устройств с зарядовой связью, разработанные специально для применения в микроскопии, предлагаются многочисленными производителями оригинального оборудования и послепродажного обслуживания, а датчики изображения CMOS в настоящее время становятся доступными для нескольких микроскопов.
Обе технологии были разработаны в период между началом и концом 1970-х годов, но датчики CMOS имели неприемлемую производительность, и до начала 1990-х годов их обычно не замечали или считали просто диковинкой. К тому времени достижения в конструкции КМОП позволили создать микросхемы с меньшим размером пикселей, уменьшенным шумом, более совершенными алгоритмами обработки изображений и большими массивами изображений. Среди основных преимуществ КМОП-датчиков — низкое энергопотребление, основные часы и источник питания с одним напряжением, в отличие от ПЗС-матриц, которые часто требуют 5 или более напряжений питания на разных тактовых частотах со значительно более высоким энергопотреблением. Как КМОП, так и ПЗС-чипы воспринимают свет с помощью аналогичных механизмов, используя преимущество фотоэлектрический эффект , который возникает, когда фотоны взаимодействуют с кристаллизованным кремнием, продвигая электроны из валентной зоны в зону проводимости. Обратите внимание, что термин «КМОП» относится к процессу изготовления датчика изображения, а не к конкретной технологии обработки изображений.
Как КМОП, так и ПЗС-чипы воспринимают свет с помощью аналогичных механизмов, используя преимущество фотоэлектрический эффект , который возникает, когда фотоны взаимодействуют с кристаллизованным кремнием, продвигая электроны из валентной зоны в зону проводимости. Обратите внимание, что термин «КМОП» относится к процессу изготовления датчика изображения, а не к конкретной технологии обработки изображений.
Когда широкий диапазон длин волн видимого света падает на специально легированные кремниевые полупроводниковые материалы, высвобождается различное количество электронов пропорционально плотности потока фотонов, падающих на поверхность фотодиода. По сути, количество произведенных электронов зависит от длины волны и интенсивности света, попадающего на полупроводник. Электроны собираются в потенциальная яма до окончания периода интегрирования (освещения), а затем либо преобразуются в напряжение (КМОП-процессоры), либо передаются в измерительный регистр (ПЗС-сенсоры). Измеренное напряжение или заряд (после преобразования в напряжение) затем проходит через аналого-цифровой преобразователь, который формирует цифровое электронное представление сцены, отображаемой датчиком.
Измеренное напряжение или заряд (после преобразования в напряжение) затем проходит через аналого-цифровой преобразователь, который формирует цифровое электронное представление сцены, отображаемой датчиком.
Фотодиод, часто называемый пикселем, является ключевым элементом цифрового датчика изображения. Чувствительность определяется сочетанием максимального заряда, который может быть накоплен фотодиодом, в сочетании с эффективностью преобразования падающих фотонов в электроны и способностью устройства накапливать заряд в ограниченной области без утечки или распространения. Эти факторы обычно определяются физическим размером и апертурой фотодиода, а также его пространственным и электронным отношением к соседним элементам матрицы. Другим важным фактором является коэффициент преобразования заряда в напряжение, который определяет, насколько эффективно интегральный заряд электрона преобразуется в сигнал напряжения, который можно измерить и обработать. Фотодиоды обычно организованы в виде ортогональной сетки, размер которой может варьироваться от 128 × 128 пикселей (16 тыс. пикселей) до более распространенных 1280 × 1024 (более миллиона пикселей). Некоторые из новейших датчиков изображения CMOS, например, разработанные для телевидения высокой четкости ( HDTV ), содержат несколько миллионов пикселей, организованных в очень большие массивы размером более 2000 квадратных пикселей. Сигналы от всех пикселей, составляющих каждую строку и каждый столбец массива, должны быть точно обнаружены и измерены (считаны), чтобы собрать изображение из данных накопления заряда фотодиода.
пикселей) до более распространенных 1280 × 1024 (более миллиона пикселей). Некоторые из новейших датчиков изображения CMOS, например, разработанные для телевидения высокой четкости ( HDTV ), содержат несколько миллионов пикселей, организованных в очень большие массивы размером более 2000 квадратных пикселей. Сигналы от всех пикселей, составляющих каждую строку и каждый столбец массива, должны быть точно обнаружены и измерены (считаны), чтобы собрать изображение из данных накопления заряда фотодиода.
В оптической микроскопии свет, собранный объективом, фокусируется проекционной линзой на поверхность датчика, содержащую двумерную матрицу идентичных фотодиодов, называемых элементов изображения или пикселей . Таким образом, размер массива и размеры пикселей определяют пространственное разрешение сенсора. Интегральные схемы КМОП и ПЗС по своей сути являются монохроматическими (черно-белыми) устройствами, реагирующими только на общее количество электронов, накопленных в фотодиодах, а не на цвет света, вызывающий их высвобождение из кремниевой подложки. Цвет определяется либо путем пропускания падающего света через последовательную серию красных, зеленых и синих фильтров, либо с помощью миниатюрных прозрачных полимерных тонкопленочных фильтров, которые наносятся в виде мозаики на массив пикселей.
Цвет определяется либо путем пропускания падающего света через последовательную серию красных, зеленых и синих фильтров, либо с помощью миниатюрных прозрачных полимерных тонкопленочных фильтров, которые наносятся в виде мозаики на массив пикселей.
Устройство КМОП-фотодиода
Основным преимуществом КМОП-датчиков изображения по сравнению с ПЗС-аналогами является возможность интегрировать ряд функций обработки и управления, выходящих за рамки основной задачи сбора фотонов, непосредственно в датчике Интегральная схема. Эти функции обычно включают логику синхронизации, управление экспозицией, аналого-цифровое преобразование, затвор, баланс белого, регулировку усиления и алгоритмы начальной обработки изображения. Для выполнения всех этих функций архитектура интегральной схемы КМОП больше похожа на ячейку памяти с произвольным доступом, чем на простую матрицу фотодиодов. Самые популярные конструкции КМОП построены вокруг 9Технология 0006 Active Pixel Sensor ( APS ), в которой фотодиод и усилитель считывания встроены в каждый пиксель. Это позволяет преобразовывать заряд, накопленный фотодиодом, в усиленное напряжение внутри пикселя, а затем передавать последовательными строками и столбцами часть чипа, обрабатывающую аналоговые сигналы.
Это позволяет преобразовывать заряд, накопленный фотодиодом, в усиленное напряжение внутри пикселя, а затем передавать последовательными строками и столбцами часть чипа, обрабатывающую аналоговые сигналы.
Таким образом, каждый пиксель (или элемент изображения) содержит, помимо фотодиода, триаду транзисторов, которые преобразуют накопленный заряд электронов в измеряемое напряжение, сбрасывают фотодиод и передают напряжение на шину вертикального столбца. Полученный массив представляет собой организованную шахматную доску металлических шин считывания, которые содержат фотодиод и соответствующую схему подготовки сигнала на каждом пересечении. Шины подают синхронизирующие сигналы на фотодиоды и возвращают считываемую информацию обратно в схему аналогового декодирования и обработки, расположенную вдали от матрицы фотодиодов. Эта конструкция позволяет считывать сигналы от каждого пикселя в массиве с помощью простых x,y методов адресации, которые невозможны с современной технологией CCD.
Архитектура типичного датчика изображения CMOS представлена на рисунке 1 для кристалла интегральной схемы, который содержит активную область изображения 640 × 480 пикселей. Матрица фотодиодов, расположенная в большой красновато-коричневой центральной области чипа, покрыта упорядоченным тонким слоем красных, зеленых и синих полимерных фильтров, размер каждого из которых соответствует размеру отдельного фотодиода (аналогично технология, используемая для цветных ПЗС). Чтобы концентрировать падающие фотоны в ячейки для сбора электронов фотодиода, фотодиоды с фильтрами также размещаются под миниатюрной положительной менисковой линзой (см. рис. 2, 3 и 4), известной как микролинзовая или двояковыпуклая матрица. На вставке к рисунку 1 показаны фильтры и массив микролинз с большим увеличением. В интегральную схему, показанную на рис. 1, также включена схема обработки аналоговых сигналов, которая собирает и интерпретирует сигналы, генерируемые матрицей фотодиодов. Эти сигналы затем отправляются в схемы аналого-цифрового преобразования, расположенные рядом с матрицей фотодиодов в верхней части микросхемы (как показано на рисунке 1). Среди других задач, выполняемых КМОП-датчиком изображения, — тактовая синхронизация для ступенчатой генерации заряда, сбора напряжения, передачи и измерения, а также обработка изображения и вывод накопленных сигналов.
Среди других задач, выполняемых КМОП-датчиком изображения, — тактовая синхронизация для ступенчатой генерации заряда, сбора напряжения, передачи и измерения, а также обработка изображения и вывод накопленных сигналов.
При более внимательном рассмотрении массива фотодиодов можно обнаружить последовательный набор красных, зеленых и синих фильтров, расположенных в виде мозаики, названной в честь инженера Kodak Брайса Э. Байера. Эта матрица цветных фильтров (шаблон фильтра Байера ) предназначена для захвата информации о цвете от широкополосного падающего света, поступающего от системы оптических линз. Фильтры расположены квартетом (рис. 2(а) и рис. 2(б)) в последовательных рядах, в которых чередуются либо красный и зеленый, либо синий и зеленый фильтры (рис. 2(а)). На рис. 2 представлены цифровые изображения типичной матрицы фильтров Байера и фотодиодов, полученных с помощью оптического микроскопа высокого разрешения. Рисунок 2(a) иллюстрирует вид чередующихся рядов фильтров.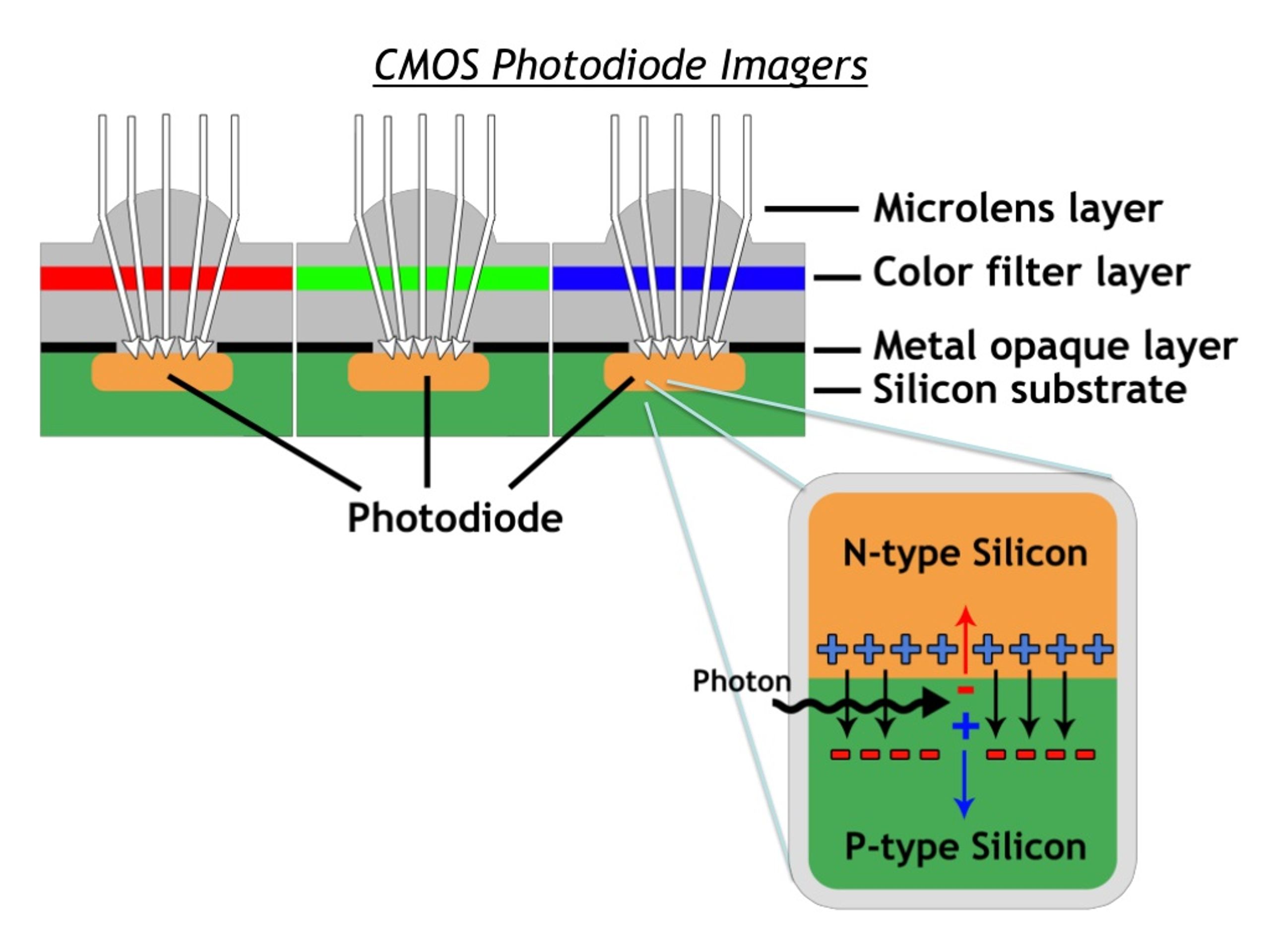 Каждый красный фильтр окружен четырьмя зелеными и четырьмя синими фильтрами, а каждый синий фильтр окружен четырьмя красными и четырьмя зелеными фильтрами. Напротив, каждый зеленый фильтр окружен двумя красными, четырьмя зелеными и двумя синими фильтрами. Изображение основного повторяющегося элемента с большим увеличением представлено на рисунке 2(b) и содержит один красный, один синий и два зеленых фильтра, в результате чего общее количество зеленых фильтров в массиве равно количеству красных и синих фильтров. комбинированный. Особое внимание уделяется зеленым фильтрам из-за зрительной реакции человека, которая достигает максимальной чувствительности в 550-нм (зеленом) диапазоне длин волн видимого спектра.
Каждый красный фильтр окружен четырьмя зелеными и четырьмя синими фильтрами, а каждый синий фильтр окружен четырьмя красными и четырьмя зелеными фильтрами. Напротив, каждый зеленый фильтр окружен двумя красными, четырьмя зелеными и двумя синими фильтрами. Изображение основного повторяющегося элемента с большим увеличением представлено на рисунке 2(b) и содержит один красный, один синий и два зеленых фильтра, в результате чего общее количество зеленых фильтров в массиве равно количеству красных и синих фильтров. комбинированный. Особое внимание уделяется зеленым фильтрам из-за зрительной реакции человека, которая достигает максимальной чувствительности в 550-нм (зеленом) диапазоне длин волн видимого спектра.
Также на рис. 2(b) показана небольшая часть массива микролинз (также называемых линзами ), нанесенных с помощью фотолитографии на поверхность фильтров Байера и выровненных таким образом, чтобы каждая линза перекрывала отдельный фильтр. Форма миниатюрных линзовых элементов приближается к форме выпуклой менисковой линзы и служит для фокусировки падающего света непосредственно в светочувствительную область фотодиода. Под фильтром Байера и массивом микролинз находятся сами фотодиоды, которые показаны на рисунке 2(c) в виде четырех полных фотодиодных сборок или блоков пикселей. Один из фотодиодов на рис. 2(c) обозначен большим белым прямоугольником (верхний правый угол), который также содержит меньший прямоугольный прямоугольник в большей сетке. Белые прямоугольники обозначены буквами 9.0006 P и T , которые относятся к сбору фотонов (светочувствительным) и поддерживают транзисторные области пикселя соответственно.
Под фильтром Байера и массивом микролинз находятся сами фотодиоды, которые показаны на рисунке 2(c) в виде четырех полных фотодиодных сборок или блоков пикселей. Один из фотодиодов на рис. 2(c) обозначен большим белым прямоугольником (верхний правый угол), который также содержит меньший прямоугольный прямоугольник в большей сетке. Белые прямоугольники обозначены буквами 9.0006 P и T , которые относятся к сбору фотонов (светочувствительным) и поддерживают транзисторные области пикселя соответственно.
Как видно из изучения фотодиодных элементов на рис. 2(c), большая часть площади пикселя (приблизительно 70 процентов в этом примере) отведена вспомогательным транзисторам (усилитель, сброс и выбор строки), которые относительно непрозрачны для фотонов видимого света и не могут использоваться для обнаружения фотонов. Остальные 30 процентов (меньшая белая коробка с надписью P на рисунке 2(c)) представляет собой светочувствительную часть пикселя. Поскольку такая небольшая часть фотодиода на самом деле способна поглощать фотоны для генерации заряда, коэффициент заполнения или апертура КМОП-чипа и фотодиодов, показанных на рисунках 1, 2 и 3, составляет только 30 процентов от общего количества фотодиода.![]() площадь поверхности массива. Следствием этого является значительная потеря чувствительности и соответствующее снижение отношения сигнал/шум, что приводит к ограничению динамического диапазона. Соотношения коэффициента заполнения варьируются от устройства к устройству, но в целом они составляют от 30 до 80 процентов площади пикселя в датчиках CMOS.
площадь поверхности массива. Следствием этого является значительная потеря чувствительности и соответствующее снижение отношения сигнал/шум, что приводит к ограничению динамического диапазона. Соотношения коэффициента заполнения варьируются от устройства к устройству, но в целом они составляют от 30 до 80 процентов площади пикселя в датчиках CMOS.
Проблема пониженного коэффициента заполнения усугубляется зависящим от длины волны характером поглощения фотонов, термин, правильно называемый квантовой эффективностью КМОП- и ПЗС-сенсоров изображения. Три основных механизма препятствуют сбору фотонов светочувствительной областью: поглощение, отражение и пропускание. Как обсуждалось выше, более 70 процентов площади фотодиода могут быть экранированы транзисторами и металлическими шинами, расположенными друг над другом или чередующимися, которые являются оптически непрозрачными и поглощают или отражают большую часть падающих фотонов, сталкивающихся со структурами. Эти многослойные слои металла также могут привести к нежелательным эффектам, таким как виньетирование, перекрестные помехи пикселей, светорассеяние и дифракция.
Отражение и передача падающих фотонов происходит в зависимости от длины волны, при этом отражается большой процент более коротких длин волн (менее 400 нанометров), хотя эти потери могут (в некоторых случаях) простираться далеко в видимую область спектра. Многие датчики CMOS имеют желтое полиимидное покрытие, наносимое во время изготовления, которое поглощает значительную часть синего спектра до того, как эти фотоны достигают области фотодиода. Сокращение или сведение к минимуму использования слоев поликремния и полиимида (или полиамида) является основной задачей оптимизации квантовой эффективности в этих датчиках изображения.
Более короткие волны поглощаются в первых нескольких микронах светочувствительной области, но более длинные волны проникают все глубже, прежде чем полностью поглощаются. Кроме того, самые длинные волны видимого света (более 650 нанометров) часто проходят через фоточувствительную область, не захватываясь (или не генерируя заряд электрона), что приводит к еще одному источнику потери фотонов. Хотя применение массивов микролинз помогает фокусировать и направлять входящие фотоны в светочувствительную область и может удвоить чувствительность фотодиода, эти крошечные элементы также демонстрируют избирательность, основанную на длине волны и угле падения.
Хотя применение массивов микролинз помогает фокусировать и направлять входящие фотоны в светочувствительную область и может удвоить чувствительность фотодиода, эти крошечные элементы также демонстрируют избирательность, основанную на длине волны и угле падения.
На рис. 3 представлен трехмерный разрез типичного пикселя активного КМОП-сенсора, иллюстрирующий светочувствительную область (фотодиод), шины, микролинзу, фильтр Байера и три вспомогательных транзистора. Как обсуждалось выше, каждый элемент APS в датчике изображения CMOS содержит усилительный транзистор, который представляет собой входное устройство того, что обычно называют истоковым повторителем (нагрузка истокового повторителя является внешней по отношению к пикселю и общей для всех пикселей). в колонке). Истоковый повторитель представляет собой простой усилитель, который преобразует электроны (заряд), генерируемые фотодиодом, в напряжение, которое выводится на шину столбца. Кроме того, пиксель также имеет транзистор сброса для управления временем интегрирования или накопления фотонов, а также транзистор выбора строки, который соединяет выход пикселя с шиной столбца для считывания. Все пиксели в определенном столбце подключаются к усилителю чувствительности.
Все пиксели в определенном столбце подключаются к усилителю чувствительности.
В процессе работы первым шагом к захвату изображения является инициализация транзистора сброса для снятия заряда с фоточувствительной области и обратного смещения фотодиода. Затем начинается период интегрирования, и свет, взаимодействующий с фотодиодной областью пикселя, производит электроны, которые сохраняются в кремниевой потенциальной яме, лежащей под поверхностью (см. рис. 3). По окончании периода интегрирования транзистор выбора строки включается, подключая транзистор усилителя в выбранном пикселе к его нагрузке, образуя истоковый повторитель. Таким образом, заряд электрона в фотодиоде преобразуется в напряжение при работе истокового повторителя. Результирующее напряжение появляется на шине колонки и может быть обнаружено усилителем считывания. Затем этот цикл повторяется для считывания каждой строки датчика для получения изображения.
Одним из основных недостатков трехпиксельной конструкции APS является относительно высокий уровень артефакта, известного как фиксированный структурный шум ( FPN ). Различия в коэффициенте усиления и смещении транзистора усилителя, которые представляют собой фундаментальную проблему с технологическими колебаниями КМОП-технологии во время производства, приводят к несоответствию выходных характеристик транзисторов по всей матрице. В результате на захваченных изображениях проявляется характер шума, который является постоянным и воспроизводимым от одного изображения к другому. В большинстве случаев фиксированный структурный шум может быть значительно уменьшен или устранен за счет конструктивной настройки схемы обработки аналоговых сигналов, расположенной на периферии матрицы, или путем электронного вычитания темного изображения (коррекция плоского поля).
Различия в коэффициенте усиления и смещении транзистора усилителя, которые представляют собой фундаментальную проблему с технологическими колебаниями КМОП-технологии во время производства, приводят к несоответствию выходных характеристик транзисторов по всей матрице. В результате на захваченных изображениях проявляется характер шума, который является постоянным и воспроизводимым от одного изображения к другому. В большинстве случаев фиксированный структурный шум может быть значительно уменьшен или устранен за счет конструктивной настройки схемы обработки аналоговых сигналов, расположенной на периферии матрицы, или путем электронного вычитания темного изображения (коррекция плоского поля).
Массивы мозаичных фильтров и реконструкция изображений
Несбалансированная природа мозаичных массивов фильтров Байера, в которых зеленых фильтров вдвое больше, чем синих или красных, также может представлять проблему в отношении точной цветопередачи для отдельных пикселей. Типичные спектральные профили пропускания обычных красителей, используемых в конструкции фильтров Байера, представлены на рис. 4. Квантовая эффективность красных фильтров значительно выше, чем у зеленого и синего фильтров, которые близки друг к другу по общей эффективности. Обратите внимание на относительно большую степень спектрального перекрытия между фильтрами, особенно в области от 520 до 620 нанометров (зеленый, желтый и оранжевый).
4. Квантовая эффективность красных фильтров значительно выше, чем у зеленого и синего фильтров, которые близки друг к другу по общей эффективности. Обратите внимание на относительно большую степень спектрального перекрытия между фильтрами, особенно в области от 520 до 620 нанометров (зеленый, желтый и оранжевый).
Часто возникает вопрос о точном характере цветопередачи и пространственного разрешения фотодиодных матриц, имеющих пиксели, разделенные на основные элементы шаблона фильтра Байера. Матрица фотодиодов с размерами пикселей 640 × 480 пикселей содержит в общей сложности 307 200 пикселей, что дает 76 800 квартетов Байера. Означает ли это, что фактическое полезное пространственное разрешение изображения снижается до 320 × 240 пикселей? К счастью, пространственное разрешение в первую очередь определяется компонентом яркости цветных изображений, а не компонентом цветности (цвета). Это происходит потому, что человеческий мозг позволяет добавлять довольно грубую информацию о цвете к точной пространственной информации и интегрирует их почти без проблем.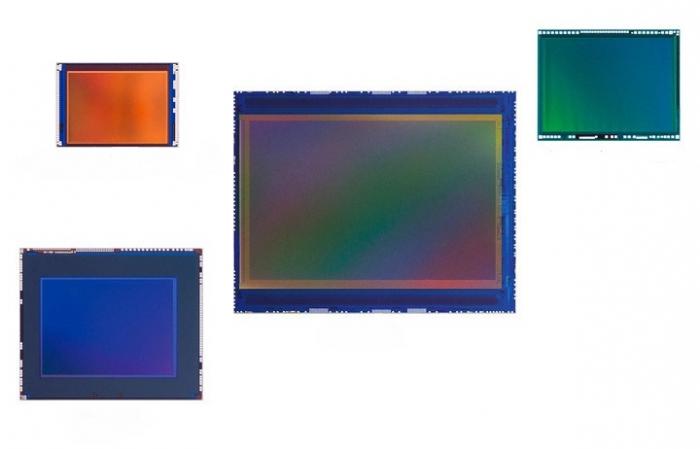 Кроме того, фильтры Байера имеют широкие полосы пропускания длин волн (см. рис. 4) с большими областями перекрытия, что позволяет проходить через фильтры пространственной информации из других областей спектра, отображающих каждый цвет со значительной степенью пространственной информации.
Кроме того, фильтры Байера имеют широкие полосы пропускания длин волн (см. рис. 4) с большими областями перекрытия, что позволяет проходить через фильтры пространственной информации из других областей спектра, отображающих каждый цвет со значительной степенью пространственной информации.
Например, рассмотрим объект, который отражает значительное количество желтого света (с центром в 585 нанометрах) в систему линз цифровой камеры CMOS. Изучая спектры пропускания фильтра Байера на рисунке 4, становится очевидным, что красный и зеленый фильтры пропускают одинаковое количество света в этой области длин волн. Кроме того, синие фильтры также пропускают примерно 20 процентов длин волн, прошедших через другие фильтры. Таким образом, три из четырех фильтров Байера в каждом квартете пропускают равное количество желтого света, а четвертый (синий) фильтр также пропускает часть этого света. Напротив, синий свет с меньшей длиной волны (435 нанометров; см. рис. 4) в значительной степени проходит только через синие фильтры, снижая как чувствительность, так и пространственное разрешение изображений, состоящих в основном из света в этой области видимого спектра.
После того, как необработанное изображение было получено с матрицы КМОП-фотодиодов, защищенной шаблоном цветных фильтров Байера, оно должно быть преобразовано в стандартный формат красного, зеленого и синего ( RGB ) с помощью метода интерполяции. Этот важный шаг необходим для получения изображения, точно отражающего сцену, отображаемую электронным датчиком. Для выполнения этой задачи (непосредственно на интегральной схеме после захвата изображения) доступно множество сложных и хорошо зарекомендовавших себя алгоритмов обработки изображений, в том числе ближайший сосед , линейный , кубический и кубический сплайн методы. Чтобы определить правильный цвет для каждого пикселя в массиве, алгоритмы усредняют значения цвета выбранных соседних пикселей и производят оценку цвета (цветности) и интенсивности (яркости) для каждого пикселя в массиве. На рис. 5(а) представлено необработанное изображение шаблона Байера до реконструкции с помощью интерполяции, а на рис. 5(б) — результаты, полученные после обработки версией алгоритма линейной интерполяции с поправкой на корреляцию.
5(б) — результаты, полученные после обработки версией алгоритма линейной интерполяции с поправкой на корреляцию.
В качестве примера того, как работает интерполяция цветов, рассмотрим один из зеленых пикселей, вложенных в центральную область массива фильтров Байера. Пиксель окружен двумя синими, двумя красными и четырьмя зелеными пикселями, которые являются его непосредственными ближайшими соседями. Алгоритмы интерполяции производят оценку красных и синих значений зеленого пикселя путем изучения значений цветности и яркости соседних красных и синих пикселей. Та же процедура повторяется для каждого пикселя в массиве. Этот метод дает отличные результаты при условии, что цвет изображения медленно изменяется на большом количестве пикселей, но также может страдать от артефактов, таких как псевдоним на краях и граничных областях, где происходят большие переходы цвета и/или интенсивности.
Чтобы улучшить квантовую эффективность и спектральную характеристику, некоторые разработчики КМОП обращаются к использованию массивов цветовых фильтров на основе основных субтрактивных цветов: голубого, желтого и пурпурного ( CMY ) вместо стандартных аддитивных основных цветов красного.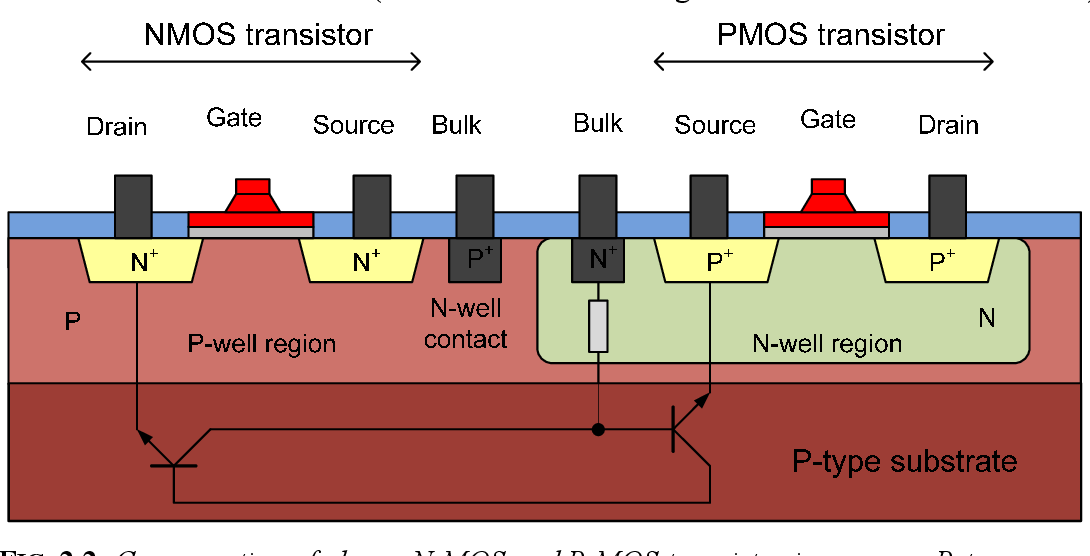 , зеленый и синий ( RGB ), которые обсуждались выше. Среди преимуществ использования массивов фильтров CMY — повышенная чувствительность, приводящая к улучшенному пропусканию света через фильтр, и более сильный сигнал. Это происходит потому, что красители с субтрактивными фильтрами демонстрируют меньшее поглощение световых волн в видимой области по сравнению с соответствующими аддитивными фильтрами. В отличие от красных, зеленых и синих фильтров, которые представляют собой композиты из двух или более слоев, обеспечивающих аддитивное поглощение, фильтры CMY наносятся в один слой, который имеет превосходные характеристики светопропускания. Недостатком фильтров CMY является более сложная матрица коррекции цвета, необходимая для преобразования данных CMY, полученных с датчика, в значения RGB, необходимые для печати или отображения изображений на мониторе компьютера. Эти алгоритмы приводят к возникновению дополнительных шумов при преобразовании цветов, но повышенная чувствительность, получаемая с помощью массивов фильтров CMY, часто может компенсировать проблемы, возникающие при обработке изображений.
, зеленый и синий ( RGB ), которые обсуждались выше. Среди преимуществ использования массивов фильтров CMY — повышенная чувствительность, приводящая к улучшенному пропусканию света через фильтр, и более сильный сигнал. Это происходит потому, что красители с субтрактивными фильтрами демонстрируют меньшее поглощение световых волн в видимой области по сравнению с соответствующими аддитивными фильтрами. В отличие от красных, зеленых и синих фильтров, которые представляют собой композиты из двух или более слоев, обеспечивающих аддитивное поглощение, фильтры CMY наносятся в один слой, который имеет превосходные характеристики светопропускания. Недостатком фильтров CMY является более сложная матрица коррекции цвета, необходимая для преобразования данных CMY, полученных с датчика, в значения RGB, необходимые для печати или отображения изображений на мониторе компьютера. Эти алгоритмы приводят к возникновению дополнительных шумов при преобразовании цветов, но повышенная чувствительность, получаемая с помощью массивов фильтров CMY, часто может компенсировать проблемы, возникающие при обработке изображений.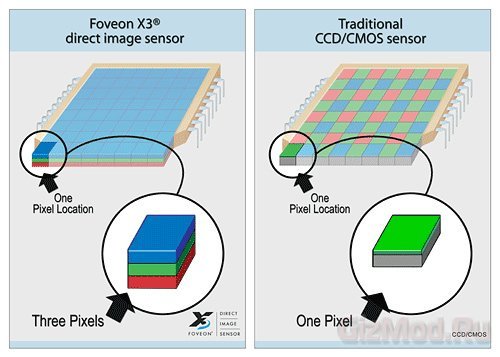
Источники шума и меры по его устранению
Основной проблемой КМОП-сенсоров изображения является высокий уровень шума, который становится очевидным при просмотре изображений, создаваемых этими устройствами. Достижения в сенсорных технологиях позволили тщательно интегрировать схемы обработки сигналов вместе с матрицей изображений, что существенно ослабило многие источники шума и значительно улучшило характеристики КМОП. Однако другие типы шума часто досаждают как дизайнерам, так и конечным пользователям. Как обсуждалось выше, фиксированный структурный шум практически устранен современными методами обработки сигнала после сбора данных КМОП, но с другими формами, такими как фотонный дробовой шум, темновой ток, шум сброса и тепловой шум, справиться не так просто.
Во время инициализации или сброса фотодиода с помощью транзистора сброса генерируется большая составляющая шума, называемая kTC (или шум сброса), которую трудно удалить без усовершенствования схемы. Аббревиатура к относится к постоянной Больцмана, тогда как Т — рабочая температура, а Кл — полная емкость, возникающая на входном узле транзистора усилителя и слагаемая суммой емкостей фотодиода и входной емкости транзистора. транзистор усилителя. Шум сброса может серьезно ограничить отношение сигнал/шум матрицы. И сброс, и другой источник шума, обычно называемый усилитель или 1/f низкочастотный шум, можно контролировать с помощью метода, известного как коррелированная двойная выборка ( CDS ), которая должна быть реализована путем добавления четвертого «измерения» (или передачи ) транзистор на каждый пиксель. Алгоритм двойной выборки работает путем измерения только шума сброса или шума усилителя, а затем вычитания комбинированного сигнала изображения и шума сброса.
Аббревиатура к относится к постоянной Больцмана, тогда как Т — рабочая температура, а Кл — полная емкость, возникающая на входном узле транзистора усилителя и слагаемая суммой емкостей фотодиода и входной емкости транзистора. транзистор усилителя. Шум сброса может серьезно ограничить отношение сигнал/шум матрицы. И сброс, и другой источник шума, обычно называемый усилитель или 1/f низкочастотный шум, можно контролировать с помощью метода, известного как коррелированная двойная выборка ( CDS ), которая должна быть реализована путем добавления четвертого «измерения» (или передачи ) транзистор на каждый пиксель. Алгоритм двойной выборки работает путем измерения только шума сброса или шума усилителя, а затем вычитания комбинированного сигнала изображения и шума сброса.
Дробовой фотонный шум хорошо заметен на захваченных изображениях как случайный узор, возникающий из-за временных изменений выходного сигнала из-за статистических флуктуаций интенсивности освещения. Каждый фотодиод в матрице создает немного отличающийся уровень фотонного шума, который в крайнем случае может серьезно повлиять на работу КМОП-сенсора изображения. Этот тип шума является доминирующим источником шума для сигналов, намного превышающих собственный шум датчика, и присутствует в каждом датчике изображения, включая ПЗС. Темновой ток генерируется артефактами, создающими сигнальный заряд (электроны) в отсутствие освещения, и может демонстрировать значительную степень колебаний от пикселя к пикселю, что сильно зависит от условий эксплуатации. Этот тип шума чувствителен к температуре и может быть удален охлаждением датчика изображения или дополнительным хранилищем кадров, которое помещается в оперативную память и вычитается из захваченного изображения.
Каждый фотодиод в матрице создает немного отличающийся уровень фотонного шума, который в крайнем случае может серьезно повлиять на работу КМОП-сенсора изображения. Этот тип шума является доминирующим источником шума для сигналов, намного превышающих собственный шум датчика, и присутствует в каждом датчике изображения, включая ПЗС. Темновой ток генерируется артефактами, создающими сигнальный заряд (электроны) в отсутствие освещения, и может демонстрировать значительную степень колебаний от пикселя к пикселю, что сильно зависит от условий эксплуатации. Этот тип шума чувствителен к температуре и может быть удален охлаждением датчика изображения или дополнительным хранилищем кадров, которое помещается в оперативную память и вычитается из захваченного изображения.
Темновой ток практически невозможно устранить, но его можно уменьшить за счет использования фотодиодной технологии с контактами при изготовлении КМОП-сенсора. Для создания закрепленного фотодиодного пикселя на поверхность типичной фоточувствительной области с ячейками N наносят неглубокий слой кремния типа P , чтобы создать сэндвич с двойным переходом, который изменяет спектральную характеристику пикселя в видимом свете.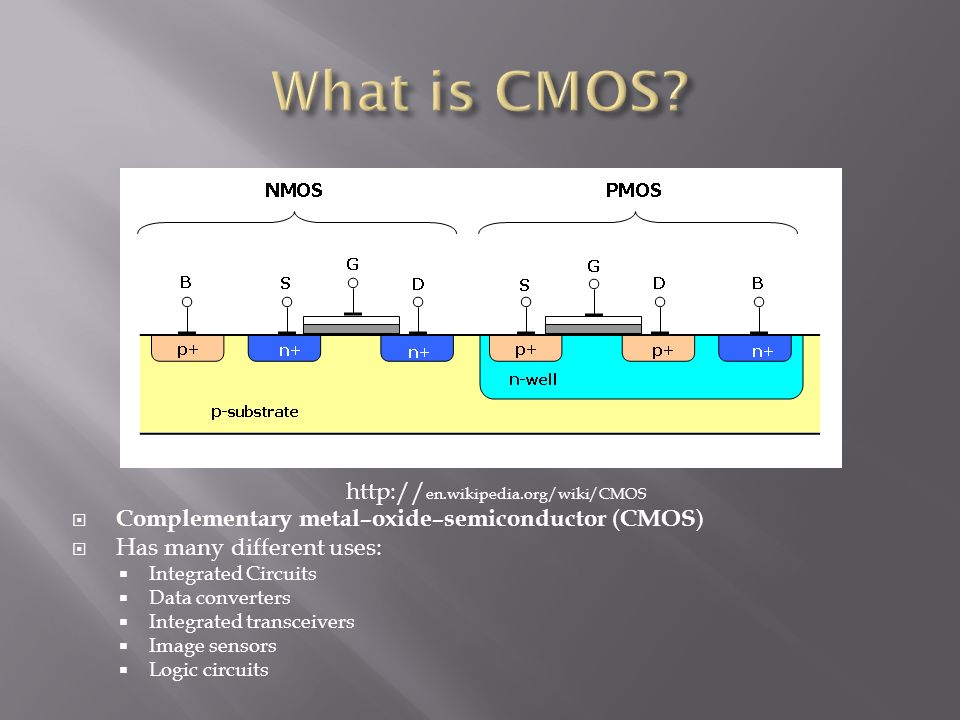 Поверхностный переход оптимизирован для реагирования на более низкие длины волн (синий), в то время как более глубокий переход более чувствителен к более длинным волнам (красный и инфракрасный). В результате электроны, собранные в потенциальной яме, удерживаются вблизи N вдали от поверхности, что приводит к уменьшению темнового тока и связанных с ним шумовых элементов. На практике может быть сложно создать закрепленный фотодиодный пиксель, который обеспечивает полный сброс в условиях низкого напряжения, в которых работают КМОП-сенсоры. Если условие полного сброса не достигается, в массив может быть введена задержка с соответствующим увеличением шума транзистора сброса. Другими преимуществами технологии штифтовых фотодиодов являются улучшенный отклик синего цвета благодаря улучшенному улавливанию коротковолнового излучения видимого света вблизи P — интерфейс кремниевого слоя.
Поверхностный переход оптимизирован для реагирования на более низкие длины волн (синий), в то время как более глубокий переход более чувствителен к более длинным волнам (красный и инфракрасный). В результате электроны, собранные в потенциальной яме, удерживаются вблизи N вдали от поверхности, что приводит к уменьшению темнового тока и связанных с ним шумовых элементов. На практике может быть сложно создать закрепленный фотодиодный пиксель, который обеспечивает полный сброс в условиях низкого напряжения, в которых работают КМОП-сенсоры. Если условие полного сброса не достигается, в массив может быть введена задержка с соответствующим увеличением шума транзистора сброса. Другими преимуществами технологии штифтовых фотодиодов являются улучшенный отклик синего цвета благодаря улучшенному улавливанию коротковолнового излучения видимого света вблизи P — интерфейс кремниевого слоя.
Транзисторы, конденсаторы и шины, переплетенные между светочувствительными областями пикселей, ответственны за создание теплового шума в датчиках изображения CMOS. Этот тип шума можно уменьшить путем точной настройки полосы пропускания имидж-сканера, увеличения выходного тока или охлаждения системы камеры. Во многих случаях можно использовать последовательность считывания пикселей КМОП для уменьшения теплового шума за счет ограничения полосы пропускания каждого транзисторного усилителя. Нецелесообразно добавлять сложные и дорогие устройства Пельтье или аналогичные охлаждающие устройства к недорогим датчикам изображения CMOS, поэтому эти устройства обычно не используются для снижения шума.
Этот тип шума можно уменьшить путем точной настройки полосы пропускания имидж-сканера, увеличения выходного тока или охлаждения системы камеры. Во многих случаях можно использовать последовательность считывания пикселей КМОП для уменьшения теплового шума за счет ограничения полосы пропускания каждого транзисторного усилителя. Нецелесообразно добавлять сложные и дорогие устройства Пельтье или аналогичные охлаждающие устройства к недорогим датчикам изображения CMOS, поэтому эти устройства обычно не используются для снижения шума.
Архитектура пикселей CMOS
В современных датчиках изображения CMOS используются две основные архитектуры светочувствительных пиксельных элементов: фотодиоды и фотозатворы (см. рис. 6). В целом конструкции фотодиодов более чувствительны к видимому свету, особенно в коротковолновой (синей) области спектра. Устройства с фотозатвором обычно имеют большую площадь пикселей, но более низкий коэффициент заполнения и гораздо более слабую реакцию на синий свет (и общую квантовую эффективность), чем фотодиоды.![]() Тем не менее, фотозатворы часто достигают более высоких уровней усиления преобразования заряда в напряжение и могут легко использоваться для выполнения коррелированной двойной выборки для достижения разности кадров.
Тем не менее, фотозатворы часто достигают более высоких уровней усиления преобразования заряда в напряжение и могут легко использоваться для выполнения коррелированной двойной выборки для достижения разности кадров.
Датчики с активными пикселями Photogate используют несколько аспектов технологии CCD для снижения шума и повышения качества изображений, снятых с помощью датчиков изображения CMOS. Заряд, накопленный под фотозатвором при интегрировании, локализуется в потенциальной яме, контролируемой транзистором доступа. Во время считывания схема опорного пикселя выполняет двухступенчатую передачу заряда (в виде напряжения) на выходную шину. Первый этап происходит путем преобразования накопленного заряда в измеримое напряжение транзистором усилителя. Затем передаточный затвор активируется, чтобы инициировать перенос заряда от светочувствительной области к выходному транзистору, а затем передается на шину столбца. Этот метод передачи обеспечивает две возможности дискретизации сигнала, которые можно использовать за счет эффективной конструкции для улучшения шумоподавления. Выходной сигнал пикселя сначала замеряется после сброса фотодиода и еще раз после интегрирования заряда сигнала. Вычитая первый сигнал из второго для удаления низкочастотного шума сброса, архитектура активного пикселя с фотозатвором может выполнять коррелированную двойную выборку.
Выходной сигнал пикселя сначала замеряется после сброса фотодиода и еще раз после интегрирования заряда сигнала. Вычитая первый сигнал из второго для удаления низкочастотного шума сброса, архитектура активного пикселя с фотозатвором может выполнять коррелированную двойную выборку.
Основным преимуществом конструкций с фотозатвором является снижение уровня шума при работе при низком уровне освещенности по сравнению с фотодиодными датчиками. Датчики CMOS на основе фотодиодов полезны для потребительских приложений среднего уровня производительности, которым не требуются высокоточные изображения с низким уровнем шума, превосходным динамическим диапазоном и характеристиками цвета с высоким разрешением. Оба устройства извлекают выгоду из экономичных требований к питанию, которые могут быть удовлетворены с помощью батарей, низковольтных источников питания от компьютерных интерфейсов (USB и FireWire) или других источников питания постоянного тока. Обычно требования к напряжению для КМОП-процессора колеблются от 3,3 до 5,0 вольт, но более новые конструкции переходят на значения, уменьшенные наполовину.
Последовательность работы КМОП-датчика изображения
В большинстве конструкций КМОП-матриц фотодиодов активная область пикселей окружена областью оптически экранированных пикселей, расположенных в 8–12 рядов и столбцов, которые используются для компенсации уровня черного. Массив фильтров Байера (или CMY) начинается с верхнего левого пикселя в первой неэкранированной строке и столбце. Когда начинается каждый период интегрирования, все пиксели в одной и той же строке будут сбрасываться встроенной схемой синхронизации и управления, по одной строке за раз, проходя от первой до последней строки, каталогизированной регистром адреса строки (см. 7). Для сенсорного устройства с аналоговым выходом, когда интеграция завершена, та же схема управления будет передавать интегрированное значение каждого пикселя в коррелированную схему двойной выборки (9).0006 блока CDS на рисунке 7), а затем в регистр горизонтального сдвига. После загрузки регистра сдвига информация о пикселях будет последовательно сдвигаться (по одному пикселю за раз) в аналоговый видеоусилитель.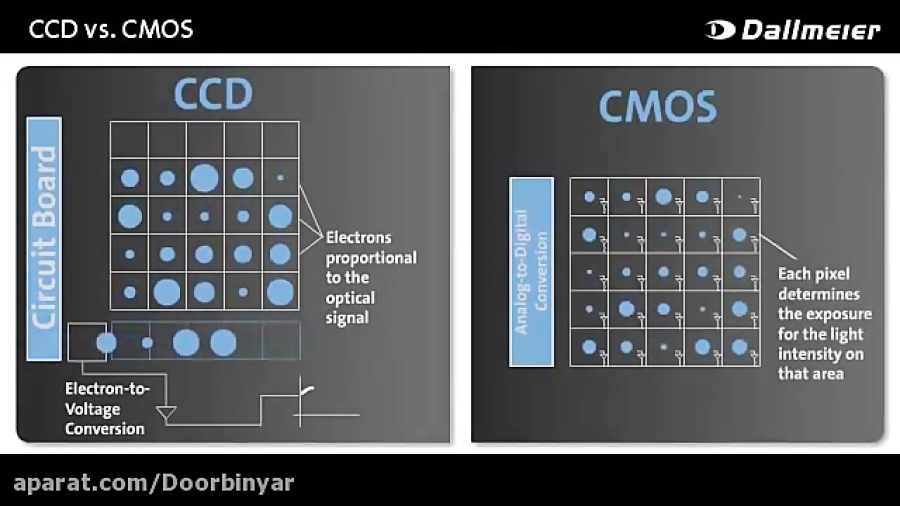 Усиление этого усилителя регулируется либо аппаратно, либо программно (а в некоторых случаях и тем, и другим). Напротив, датчики изображения CMOS с цифровым считыванием используют аналого-цифровой преобразователь для каждого столбца, и преобразование выполняется параллельно для каждого пикселя в строке. Цифровая шина, имеющая ширину, равную числу битов, по которым выполняется преобразование, затем используется для вывода данных. В этом случае «последовательно» сдвигаются только цифровые значения. На этом этапе к пикселям часто применяются алгоритмы баланса белого.
Усиление этого усилителя регулируется либо аппаратно, либо программно (а в некоторых случаях и тем, и другим). Напротив, датчики изображения CMOS с цифровым считыванием используют аналого-цифровой преобразователь для каждого столбца, и преобразование выполняется параллельно для каждого пикселя в строке. Цифровая шина, имеющая ширину, равную числу битов, по которым выполняется преобразование, затем используется для вывода данных. В этом случае «последовательно» сдвигаются только цифровые значения. На этом этапе к пикселям часто применяются алгоритмы баланса белого.
После установки значений усиления и смещения в видеоусилителе (обозначенном как Video Amp на рис. 7) информация о пикселях затем передается в аналого-цифровой преобразователь, где она преобразуется в линейный цифровой массив двоичных значений. цифры. Затем данные цифровых пикселей дополнительно обрабатываются для устранения дефектов, возникающих в «плохих» пикселях, и для компенсации уровней черного перед кадрированием и выводом на порт цифрового вывода. Алгоритм компенсации уровня черного (часто называемый ограничение частоты кадров ) вычитает средний уровень сигнала черных пикселей, окружающих массив, из цифрового видеовыхода, чтобы компенсировать температурный и зависящий от времени уровень темнового шума в активном массиве пикселей.
Алгоритм компенсации уровня черного (часто называемый ограничение частоты кадров ) вычитает средний уровень сигнала черных пикселей, окружающих массив, из цифрового видеовыхода, чтобы компенсировать температурный и зависящий от времени уровень темнового шума в активном массиве пикселей.
Следующим шагом в этой последовательности является восстановление изображения (см. рис. 7) и применение основных алгоритмов, необходимых для подготовки конечного изображения к кодированию дисплея. Интерполяция ближайшего соседа выполняется для пикселей, которые затем фильтруются с помощью алгоритмов сглаживания и масштабируются. Дополнительные этапы обработки изображения в механизме восстановления часто включают в себя защиту от виньетирования, коррекцию пространственных искажений, балансировку белого и черного, сглаживание, повышение резкости, цветовой баланс, коррекцию диафрагмы и настройку гаммы. В некоторых случаях датчики изображения CMOS оснащены вспомогательными цепями, которые обеспечивают встроенные функции, такие как защита от дрожания (стабилизация изображения) и сжатие изображения. Когда изображение достаточно обработано, оно отправляется в процессор цифровых сигналов для буферизации на порт вывода.
Когда изображение достаточно обработано, оно отправляется в процессор цифровых сигналов для буферизации на порт вывода.
Поскольку датчики изображения CMOS способны получать доступ к данным отдельных пикселей по всей матрице фотодиодов, их можно использовать для выборочного считывания и обработки только выбранной части пикселей, захваченных для определенного изображения. Этот метод известен как оконная обработка (или считывание окна интереса ) и значительно расширяет возможности обработки изображений с помощью этих датчиков. Работа с окнами управляется непосредственно на чипе через схему синхронизации и управления, что позволяет получать доступ к окну любого размера в любом положении в активной области массива и отображать его с разрешением один к одному пикселю. Эта функция может быть чрезвычайно полезна, когда необходимо временное отслеживание движения объекта в одной части изображения. Его также можно использовать для встроенного управления электронным панорамированием, масштабированием, ускоренным считыванием и наклоном выбранной части или всего изображения.
Большинство высококлассных КМОП-сенсоров имеют несколько режимов считывания (аналогичных тем, что используются в ПЗС-сенсорах) для повышения универсальности программирования программного интерфейса и настройки затвора. Прогрессивная развертка Режим считывания обеспечивает последовательный доступ к каждому пикселю в каждой строке матрицы фотодиодов (по одному пикселю за раз), начиная с верхнего левого угла и продвигаясь к нижнему правому углу. Другой популярный режим считывания называется с чересстрочной разверткой и работает путем считывания данных пикселей в двух последовательных полях, нечетное поле , за которым следует четное поле . Поля чередуются в строках от верха массива к низу, и каждая строка группы записывается последовательно, прежде чем считывается следующая группа. Например, в датчике, имеющем 40 строк пикселей, сначала считываются первая, третья, пятая и так далее до 39-й строки, затем вторая, четвертая, шестая, вплоть до 40-й строки.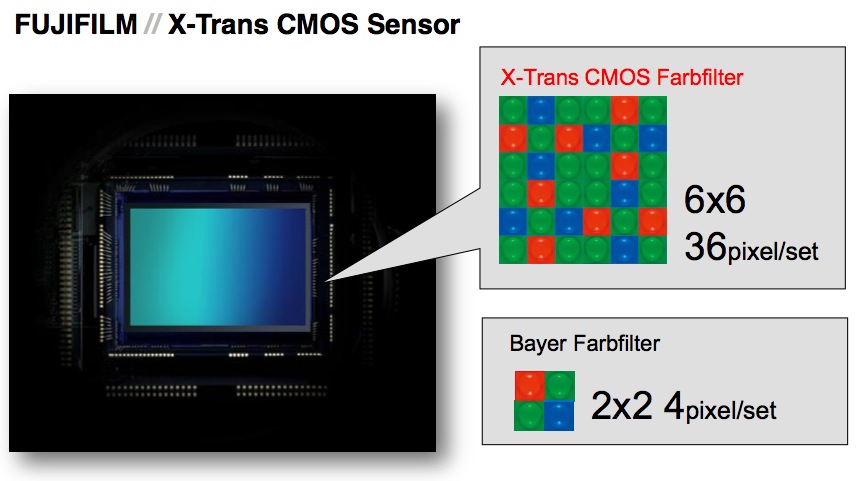
Электронный затвор в КМОП-датчиках изображения требует добавления одного или нескольких транзисторов к каждому пикселю, что является несколько непрактичным подходом, учитывая уже скомпрометированный коэффициент заполнения в большинстве устройств. Это относится к большинству датчиков изображения с областным сканированием. Однако были разработаны датчики линейного сканирования, в которых транзисторы с затвором размещены рядом с активной областью пикселя, чтобы уменьшить нагрузку коэффициента заполнения. Многие дизайнеры реализовали неоднородность 9Решение со скользящим затвором 0006 , которое показывает последовательные строки в массиве в разные промежутки времени, используя минимальное количество внутрипиксельных транзисторов. Хотя механизмы скользящего затвора хорошо работают для неподвижных изображений, они могут создавать размытие движущихся объектов, что приводит к искажению изображения при высокой частоте кадров. Чтобы решить эту проблему, инженеры разработали унифицированных синхронных затворов, которые выставляют весь массив одновременно. Поскольку этот метод требует дополнительных транзисторов в каждом пикселе, существует некоторый компромисс коэффициентов заполнения, если только одновременно не реализуются более крупные пиксели.
Поскольку этот метод требует дополнительных транзисторов в каждом пикселе, существует некоторый компромисс коэффициентов заполнения, если только одновременно не реализуются более крупные пиксели.
Динамический диапазон КМОП-сенсора изображения определяется максимальным количеством сигнальных электронов, накопленных фотодиодами (зарядовая емкость), деленным на сумму всех составляющих шума считывания сенсора ( минимальный уровень шума ), включая временные источники шума, возникающие за определенное время интегрирования. В этот расчет включен вклад всех источников темнового шума, таких как шум темнового тока, а также шум считывания пикселей и временной шум, возникающий на пути прохождения сигнала (но не фотонный дробовой шум). Минимальный уровень шума ограничивает качество изображения в темных областях изображения и увеличивается с увеличением времени экспозиции из-за дробового шума темнового тока. Таким образом, динамический диапазон представляет собой отношение наибольшего обнаруживаемого сигнала к наименьшему одновременно обнаруживаемому сигналу (шумовой порог). Динамический диапазон часто указывается в уровней серого , децибел или бит , с более высокими отношениями сигнальных электронов к шуму, создающими большие значения динамического диапазона (больше децибелов или битов). Обратите внимание, что динамический диапазон определяется характеристиками отношения сигнал-шум датчика, а разрядность зависит от аналого-цифрового преобразователя (преобразователей), используемых в датчике. Таким образом, 12-битное цифровое преобразование соответствует немногим более 4000 уровней серого или 72 децибелам, в то время как 10-битное преобразование может разрешить 1000 уровней серого, что соответствует разрядности для динамического диапазона 60 децибел. По мере увеличения динамического диапазона датчика улучшается возможность одновременной регистрации самых тусклых и самых ярких яркостей изображения (внутрисценовый динамический диапазон), а также возможности количественного измерения детектора. межсценовый динамический диапазон представляет собой спектр интенсивностей, который можно использовать, когда коэффициент усиления детектора, время интегрирования, апертура объектива и другие переменные настраиваются для различных полей зрения.
Динамический диапазон часто указывается в уровней серого , децибел или бит , с более высокими отношениями сигнальных электронов к шуму, создающими большие значения динамического диапазона (больше децибелов или битов). Обратите внимание, что динамический диапазон определяется характеристиками отношения сигнал-шум датчика, а разрядность зависит от аналого-цифрового преобразователя (преобразователей), используемых в датчике. Таким образом, 12-битное цифровое преобразование соответствует немногим более 4000 уровней серого или 72 децибелам, в то время как 10-битное преобразование может разрешить 1000 уровней серого, что соответствует разрядности для динамического диапазона 60 децибел. По мере увеличения динамического диапазона датчика улучшается возможность одновременной регистрации самых тусклых и самых ярких яркостей изображения (внутрисценовый динамический диапазон), а также возможности количественного измерения детектора. межсценовый динамический диапазон представляет собой спектр интенсивностей, который можно использовать, когда коэффициент усиления детектора, время интегрирования, апертура объектива и другие переменные настраиваются для различных полей зрения.
Одной из наиболее универсальных возможностей датчиков изображения CMOS является их способность захватывать изображения с очень высокой частотой кадров. Это позволяет записывать цейтраферные последовательности и видео в реальном времени через интерфейсы, управляемые программным обеспечением. Частота кадров составляет от 30 до 60 кадров в секунду, в то время как некоторые высокоскоростные устройства формирования изображений могут достигать скорости более 1000 кадров в секунду. Для создания систем камер, которые могут преимущество этих особенностей.
Выводы
КМОП-датчики изображения изготавливаются по хорошо зарекомендовавшим себя стандартным кремниевым технологиям на крупносерийных заводах по производству полупроводниковых пластин, которые также производят соответствующие микросхемы, такие как микропроцессоры, схемы памяти, микроконтроллеры и цифровые сигнальные процессоры. Огромным преимуществом является то, что цифровые логические схемы, драйверы часов, счетчики и аналого-цифровые преобразователи могут быть размещены на той же кремниевой основе и в то же время, что и матрица фотодиодов.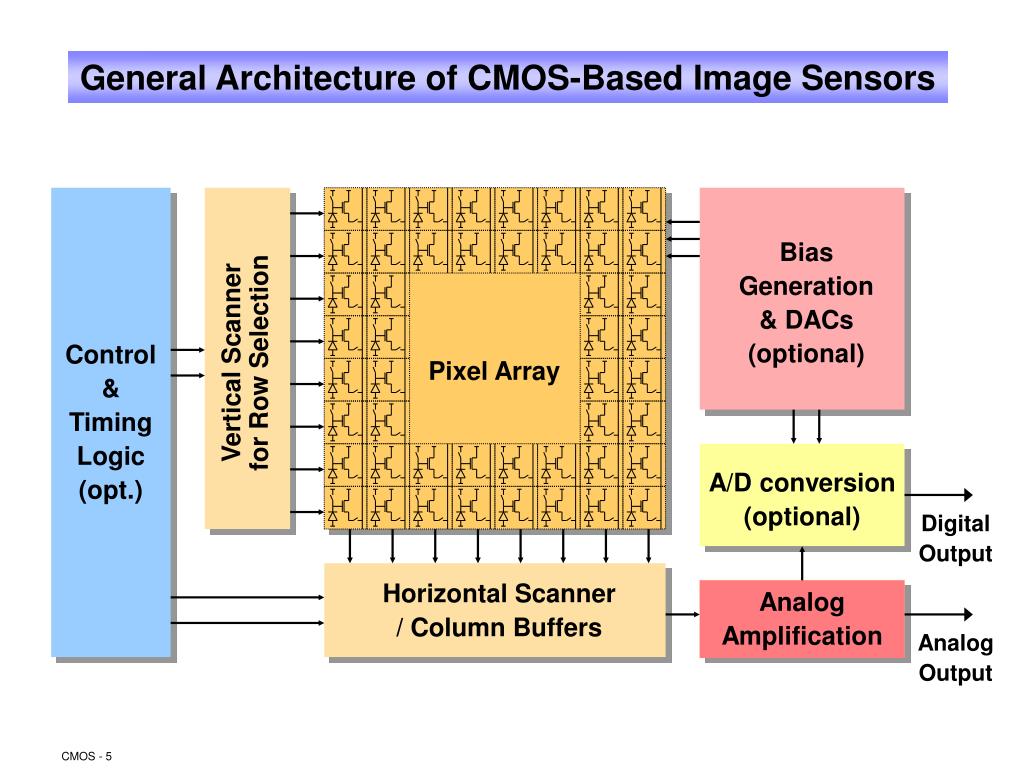 Это позволяет КМОП-датчикам участвовать в процессах сокращения, которые позволяют уменьшить ширину линий с минимальным изменением конструкции, аналогично другим интегральным схемам. Тем не менее, чтобы гарантировать малошумящие устройства с высокой производительностью, стандартный процесс изготовления КМОП часто необходимо модифицировать, чтобы специально приспособить датчики изображения. Например, стандартные методы КМОП для создания транзисторных переходов в логических микросхемах могут давать высокие темновые токи и низкий отклик синего при применении к устройству формирования изображения. Оптимизация процесса для датчиков изображения часто связана с компромиссами, которые делают сценарий изготовления ненадежным для обычных устройств CMOS.
Это позволяет КМОП-датчикам участвовать в процессах сокращения, которые позволяют уменьшить ширину линий с минимальным изменением конструкции, аналогично другим интегральным схемам. Тем не менее, чтобы гарантировать малошумящие устройства с высокой производительностью, стандартный процесс изготовления КМОП часто необходимо модифицировать, чтобы специально приспособить датчики изображения. Например, стандартные методы КМОП для создания транзисторных переходов в логических микросхемах могут давать высокие темновые токи и низкий отклик синего при применении к устройству формирования изображения. Оптимизация процесса для датчиков изображения часто связана с компромиссами, которые делают сценарий изготовления ненадежным для обычных устройств CMOS.
В течение последних нескольких лет размер пикселей продолжал уменьшаться: от гигантских пикселей размером 10-20 микрон, которые доминировали в устройствах середины 1990-х годов, до сенсоров размером 6-8 микрон, которые в настоящее время заполонили рынок. Повышенный спрос на миниатюрные электронные устройства обработки изображений, такие как камеры наблюдения и телефонные камеры, побудил дизайнеров еще больше уменьшить размер пикселей. Датчики изображения с размером пикселя 4–5 микрон используются в устройствах с меньшими матрицами, но для мультимегапиксельных чипов потребуются пиксели размером от 3 до 4 микрон. Чтобы достичь этих размеров, датчики изображения CMOS должны производиться на производственных линиях с размером 0,25 микрона или более. Используя более узкую ширину строки, в каждый элемент пикселя можно упаковать больше транзисторов, сохраняя при этом приемлемые коэффициенты заполнения, при условии, что коэффициенты масштабирования приближаются к единице. С производственными линиями размером от 0,13 до 0,25 микрона передовые технологии, такие как аналого-цифровые преобразователи в пикселях, полноцветная обработка, логика интерфейса и другие связанные сложные схемы, настроенные для повышения гибкости и динамического диапазона датчиков CMOS, должны стать возможный.
Повышенный спрос на миниатюрные электронные устройства обработки изображений, такие как камеры наблюдения и телефонные камеры, побудил дизайнеров еще больше уменьшить размер пикселей. Датчики изображения с размером пикселя 4–5 микрон используются в устройствах с меньшими матрицами, но для мультимегапиксельных чипов потребуются пиксели размером от 3 до 4 микрон. Чтобы достичь этих размеров, датчики изображения CMOS должны производиться на производственных линиях с размером 0,25 микрона или более. Используя более узкую ширину строки, в каждый элемент пикселя можно упаковать больше транзисторов, сохраняя при этом приемлемые коэффициенты заполнения, при условии, что коэффициенты масштабирования приближаются к единице. С производственными линиями размером от 0,13 до 0,25 микрона передовые технологии, такие как аналого-цифровые преобразователи в пикселях, полноцветная обработка, логика интерфейса и другие связанные сложные схемы, настроенные для повышения гибкости и динамического диапазона датчиков CMOS, должны стать возможный.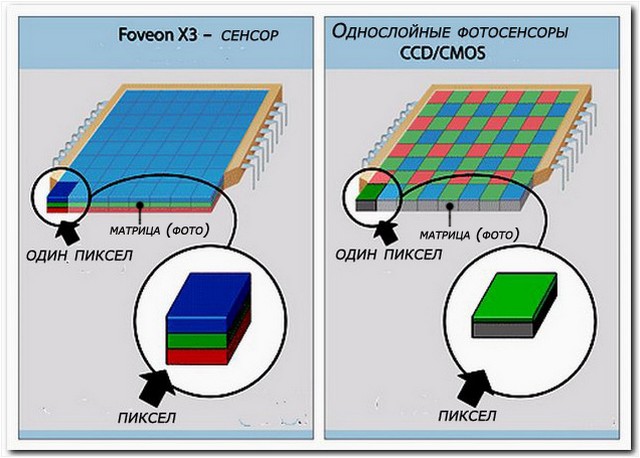
Хотя на многих предприятиях по производству КМОП отсутствуют технологические этапы добавления цветных фильтров и массивов микролинз, эти этапы все чаще внедряются для производства датчиков изображения по мере роста спроса на рынке. Кроме того, методы оптической упаковки, которые имеют решающее значение для устройств обработки изображений, требуют чистых помещений и оборудования для обработки плоского стекла, которое обычно не используется на заводах, производящих стандартные логические и процессорные интегральные схемы. Таким образом, начальные затраты на изготовление датчика изображения могут быть значительными.
За последние несколько лет список областей применения КМОП-сенсоров изображения значительно расширился. С конца 1990-х годов датчики CMOS составляют все большее количество устройств обработки изображений, продаваемых в таких приложениях, как факсимильные аппараты, сканеры, камеры безопасности, игрушки, игры, камеры для ПК и недорогие потребительские камеры. Универсальные датчики, вероятно, также начнут появляться в сотовых телефонах, считывателях штрих-кодов, оптических мышах, автомобилях и, возможно, даже в бытовых приборах в ближайшие годы.