Матрица фотоаппарата: всё что нужно знать о ней и мегапикселях | Статьи | Фото, видео, оптика
При покупке фотоаппарата одна из вещей, на которую стоит обратить внимание — матрица и её характеристики. Это самая дорогая и сложная по устройство деталь фотоаппарата.
Разбираемся, что такое матрица, какие параметры у неё бывают, и почему количество мегапикселей при современном развитии техники не самый важный маркер качества.
pixabay.com
Что такое матрица в фотоаппарате
Матрица — это специальная светочувствительная микросхема в фотоаппарате. Она принимает попадающий в камеру свет и формирует электрический сигнал, который преобразует в цифровой. По сути, матрица «превращает» свет в изображение.
Блестящее «стёклышко» в центре микросхемы — и есть матрица / wikimedia.org
Раньше фотоаппараты фиксировали сцену в кадре с помощью светочувствительной плёнки. Матрица зеркального и цифрового фотоаппаратов — это усовершенствованный технически аналог плёнки.
Что такое пиксели и мегапиксели в матрице
Матрица состоит из маленьких отдельных фотодиодов. Они чувствительны к свету. И именно они ловят его и преобразовывают в электрический сигнал. Один диод — это один пиксель цифровой фотографии. Получается пиксель матрицы фотоаппарата — маленький квадратик, за которым закреплены определённые цвет и яркость, которые уловила матрица фотодиодом.
Снимок, увеличенный до 12800%. При таком приближении картинка начинает распадаться на отдельные квадратики. Каждый квадратик — пиксель / Иллюстрация автора
Все вместе пиксели составляют изображение, которое мы видит на мониторе или в экране телефона. У современной техники они настолько малы, что глаз не может различить каждый пиксель отдельно, и мы воспринимаем картинку целостно.
У современных камер количество пикселей (фотодиодов на матрице, которые ловят свет) настолько велико, что их записывают и измеряют в миллионах. То есть в мегапикселях (МП).
Число мегапикселей — то, сколько миллионов пикселей содержит матрица. Проще всего его подсчитать, если умножить число пикселей по длине и по высоте. Например, у нас есть матрица с 5184 пикселями по длине и 3456 пикселями по высоте. 5184х3456 — это 18 мегапикселей. А, например, у Canon EOS 850D максимальное разрешение 6400х4000, что соответствует 24МП. К слову, число, указывающее количество пикселей по длине и ширине — это разрешение матрицы фотоаппарата.
Казалось бы, всё просто — чем больше мегапикселей у матрицы, тем лучше. Но это было актуально раньше, когда технология развивалась. Гораздо важнее физический размер пикселя (фотодиода) в матрице. Чем он больше, тем больше света на него попадает и тем меньше на фотографии будет шумов.
Именно поэтому, если вечером вы сфотографируете одну и ту же сцену на смартфон и на фотоаппарат, то у второго шумов будет меньше, а качество картинки — выше. Хотя по количеству мегапикселей смартфон может даже обгонять камеру! Дело в том, что у телефона физический размер пикселей гораздо меньше. И именно поэтому профессиональные и полупроф камеры никогда не были маленькими.
И именно поэтому профессиональные и полупроф камеры никогда не были маленькими.
Вывод: если выбирать между фотоаппаратами, у которых одинаковый размер матрицы (о характеристиках матриц ниже), но разное разрешение, то качественнее картинка будет у того, у которого физический размер пикселя больше. То есть, у которого общее число пикселей меньше!
Как рассчитать физический размер пикселя?
- Посмотрите характеристики фотокамеры. Найдите разрешение (в пикселях) и физический размер матрицы (измеряется в миллиметрах).
- Поделите физическую длину матрицы на количество точек по длинной стороне. Полученное число — физический размер пикселя.
Например: у Canon EOS 5D Mark IV физический размер матрицы по длинной стороне — 36мм, а максимальное разрешение — 6720 пикселей. Делим 36 на 6.720 и получаем 0,005. Это и есть размер пикселя. Также у Nikon D780 делим 35.9мм на 6048 пикселей и получаем то же самое число — 0,005.
Характеристики матриц у фотоаппаратов
Рассмотрим характеристики матрицы, на которые можно опираться при выборе фотоаппарата. При этом важно, для каких целей вы берёте камеру. Если интересна ночная съемка, то следует обратить внимание на светочувствительность матрицы и то, насколько фотоаппарат «шумный». Если же нужна компактная камера для путешествий раз в год, то нет смысла переплачивать десятки тысяч за тяжёлую и громоздкую махину для профсъёмки.
При этом важно, для каких целей вы берёте камеру. Если интересна ночная съемка, то следует обратить внимание на светочувствительность матрицы и то, насколько фотоаппарат «шумный». Если же нужна компактная камера для путешествий раз в год, то нет смысла переплачивать десятки тысяч за тяжёлую и громоздкую махину для профсъёмки.
Размер
Матрица — прямоугольная пластина со светочувствительными фотоэлементами на ней. Как мы выяснили выше, чем больше фотоэлемент (который потом станет пикселем), тем лучше качество снимка.
Да, пиксели могут быть одинаковыми на матрицах разного размера. Просто в таком случае их будет меньше и, соответственно, у фотоаппарата будет меньше разрешение. Но, в теории, чем больше матрица, тем больше фотодиодов бОльшего размера на ней можно разместить.
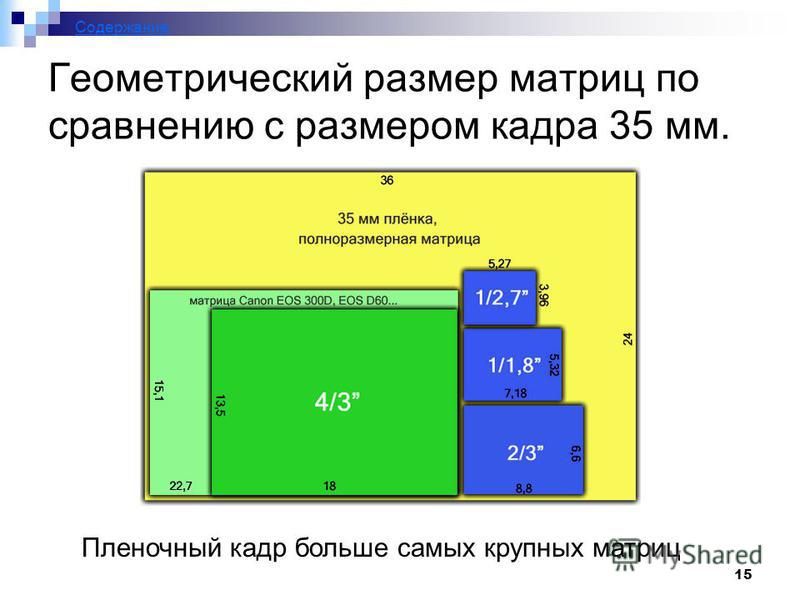
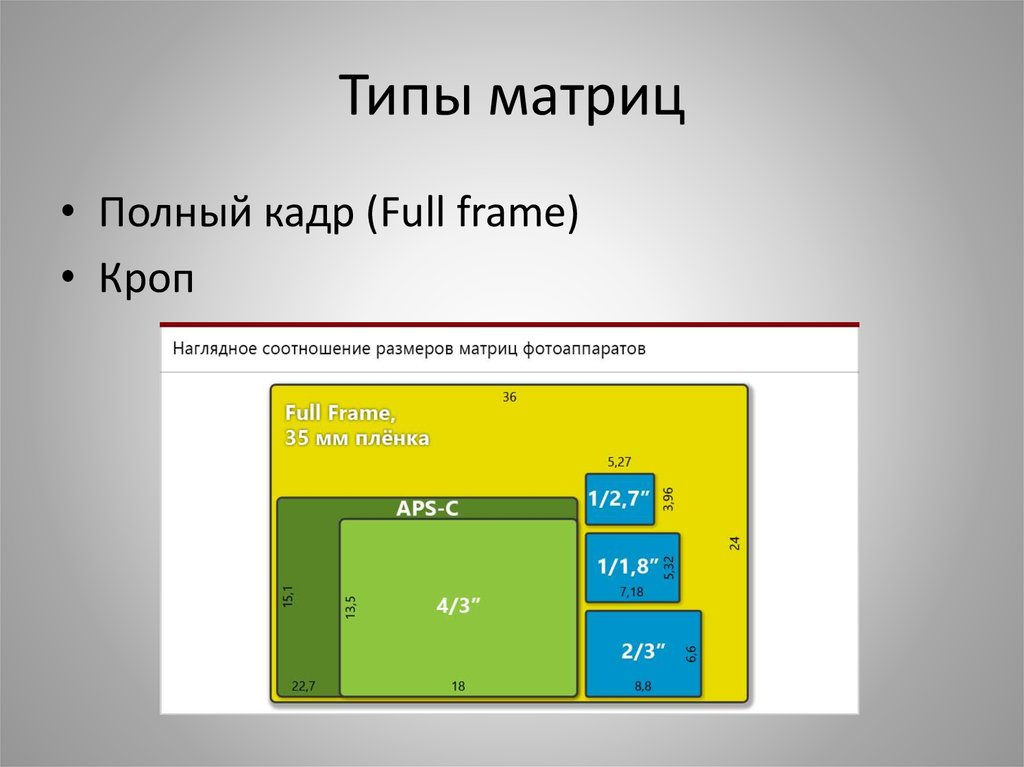
Естественно, матрицы бывают разных форматов. Для них есть условная точка отсчёта размеров — это полный кадр (можно встретить названия фуллфрейм, полнокадровый фотоаппарат, FullFrame, FF).
Физический размер полнокадровой матрицы фотоаппарата — 36х24мм. Почему именно 36 на 24? В плёночную эпоху это был стандартный размер фотоплёнки. И именно размер кадра в старых плёночных фотоаппаратах взяли за точку отсчёта.
Почему именно 36 на 24? В плёночную эпоху это был стандартный размер фотоплёнки. И именно размер кадра в старых плёночных фотоаппаратах взяли за точку отсчёта.
Кроп-фактор матрицы
Кроп-фактор — условный коэффициент, который обозначает, насколько матрица камеры меньше, если сравнивать с полнокадровой. Фуллфрейм — точка отсчёта, и именно поэтому в таблице ниже кроп-фактор фуллфрейма — единица. Фотоаппараты с размером матрицы меньше полнокадрового называют «кропнутыми».
Если всю картинку мы принимаем за полный кадр, то часть картинки в красном прямоугольнике — то, сколько от той же самой сцены захватит кропнутый фотоаппарат / Иллюстрация автора
На что влияет кроп-фактор?
- Фотоаппарат захватывает меньшую область, чем полнокадровая камера. Угол обзора уменьшается, так как уменьшается поле зрения кадра.
Это как смотреть сквозь свернутый в трубочку лист бумаги. Без него вы видете полную с цену, с ним — выхватываете отдельные детали.
– Для кропнутых камер есть своя оптика, которая не пойдет на полнокадровые фотоаппараты. У Canon такие объективы маркируют буквами EF-S, а у Nikon — DX. Например, Canon EF-S 10-18mm или Nikon 35mm f/1.8G AF-S DX. Sony отмечает оптику для полного кадра маркировкой FE вместо E для кроп-фотоаппаратов. Сравните: Sony E 18-105mm f/4 G OSS PZ и Sony FE 24mm F1.4 GM.
– На кропнутые камеры встает оптика для полнокадровых фотоаппаратов. Но угол обзора на них будет меньше. Например, если на камеру с кроп-фактором 1,52 поставить объектив с фокусным расстоянием 50мм, то его реально фокусное расстояние будет 75мм.
– Если надеть объектив для кропнутых камер на полноформатный фотоаппарат, по границам кадра поползет заметная чёрная виньетка. Но, например, у некоторых камер Nikon есть DX режим, который при съёмке сразу же кадрирует фотографию и тем самым обрезает виньетку.
Размер матриц фотоаппаратов. Таблица
Подразумевая размер матрицы, могут употреблять любое из этих значений: название формата или длину матрицы по диагонали, её размер в миллиметрах или кроп-фактор.
| Формат или диагональ (дюймы) | Размер (мм) | Кроп-фактор |
| Large format | 56 x 36 | 0.52 |
| Medium format | 44 х 33 | 0.78 |
| FullFrame или 13/8″ | 36 × 24 | 1 |
| APS-H Canon | 28,1 × 18,7 | 1,28 |
| APS-H Leica | 27 × 18 | 1,33 |
| APS-C | 23,7 × 15,6 | 1,52 |
| APS-C | 23,7 × 15,7 | 1,52 |
| APS-C | 23,7 × 15,8 | 1,52 |
| APS-C Canon | 22,3 × 14,9 | 1,61 |
| Foveon X3 | 20,7 × 13,8 | 1,74 |
| 1,5″ | 18,7 × 14,0 | 1,85 |
| 4/3″ | 17,3 × 13,0 | 2 |
| 1″ | 12,8 × 9,6 | 2,7 |
| 1″ | 13,2 × 8,8 | 2,73 |
| 1/1,33″ | 9,6 × 7,2 | 3,58 |
| 2/3″ | 8,8 × 6,6 | 3,93 |
| 1/1,63″ | 8,0 × 6,0 | 4,33 |
| 1/1,7″ | 7,6 × 5,7 | 4,55 |
| 1/1,8″ | 7,2 × 5,3 | 4,84 |
| 1/2″ | 6,4 × 4,8 | 5,41 |
| 1/2,3″ | 6,16 × 4,62 | 5,62 |
| 1/2,33″ | 6,08 × 4,56 | 5,92 |
| 1/2,5″ | 5,8 × 4,3 | 6,2 |
| 1/2,7″ | 5,4 × 4,0 | 6,7 |
| 1/2,8″ | 5,1 × 3,8 | 7,05 |
| 1/3″ | 4,8 × 3,6 | 7,5 |
| 1/3,2″ | 4,54 × 3,42 | 7,92 |
| 1/3,6″ | 4 × 3 | 9 |
| 1/4″ | 3,6 × 2,7 | 10 |
| 1/6″ | 2,4 × 1,8 | 15 |
| 1/8″ | 1,8 × 1,35 | 20 |
На что влияет размер матрицы
- количество шумов (зернистости) на фотографии.
 Чем больше матрица, тем более детализированный и чистый кадр получится. Это важный параметр, если вы снимаете в условиях плохой освещённости, вечером, ночью. Днём в яркий солнечный день разница не будет видна.
Чем больше матрица, тем более детализированный и чистый кадр получится. Это важный параметр, если вы снимаете в условиях плохой освещённости, вечером, ночью. Днём в яркий солнечный день разница не будет видна. - динамический диапазон. То есть насколько широкий диапазон яркости может захватить камера, не теряя при этом качество в тенях и светах.
- глубина цвета. Чем больше матрица, тем больше оттенков и полутонов она сможет зафиксировать. Это видно на однотонных снимках. Например, зимних пейзажах. То есть, актуально достаточно редко.
- размер камеры. Чем больше матрица, тем больше и тяжелее камера.
- широта обзора. Чем больше кроп-фактор, тем уже обзор. При прочих равных визуально кажется, что объект, сфотографированный на кропнутый фотоаппарат, ближе.
Светочувствительность
Этот тот самый параметр ISO. Если перекладывать это на матрицу, то, чем выше ISO, тем более тёмные элементы может поймать фотоаппарат. Чем выше ISO, тем светлее кадр и больше шумов.
Минимальное возможное ISO — 50. Но у разных камер разные минимальные и максимальные значения. Так, у Nikon D5600 ISO колеблется в диапазоне от 100 до 25 000, а у PENTAX K-70 — от 100 до 3 200.
Тип матриц фотоаппаратов
Матрицы различаются по технологии, на основе которой они работают.
Не так давно между собой конкурировали два основных типа:
- CCD (от Charge Coupled Device или ПЗС по-русски). У таких матриц мельчайший структурный элемент — диод.
- CMOS (от Complementary Metal Oxide Semiconductor или КМОП-матрица по-русски). В основе этих матриц транзисторы с каналами разной проводимости.
Сейчас не особо актуально, так как большинство фотоаппаратов оснащают CMOS-матрицами. Они потребляют меньше энергии, выдают меньше шумов на снимке, лучше чувствуют себя в условиях плохого освещения, а также более дешёвы в производстве, если сравнивать с CCD-матрицами.
CCD-матрица компактного фотоаппарата Canon PowerShot A480 / wikimedia. org
org
Стабилизация матрицы
Считается, что стабилизация помогает сделать картинку менее смазанной, если вы снимаете с рук и на удлиненных значениях выдержки. Эту технологию активно используют и продвигают Sony, Panasonic, Olympus, Nikon. Например, матричная стабилизация есть у Sony Alpha A7С или Panasonic Lumix DC-GH5.
Но, по большому счёту, это лишь маркетинговый ход. Так как никакая стабилизация не является панацеей и не изменит ситуацию кардинально. Профессионалы знают, что ничто не зафиксирует камеру лучше, чем штатив (читайте, как его выбрать). Кроме того, эта функция работает тяжело, если выдержка действительно высокая (от 1 секунды и больше).
Если же сравнивать стабилизацию матриц и объективов, то матричная не влияет на светосилу, что однозначно плюс. При этом более эффективной и надежной всё же считается оптическая стабилизация.
Типы матриц фотоаппаратов — Студопедия
Поделись
Виды фотоаппаратов
Компактные фотоаппараты (мыльницы). Они также делятся на три подвида: полностью автоматические аппараты, устройства с расширенными настройками и ультразумы.
Они также делятся на три подвида: полностью автоматические аппараты, устройства с расширенными настройками и ультразумы.
Полностью автоматические“нажал кнопку – получил снимок”. Все остальное сделает электроника. Сделаны из самых дешевых материалов. Оптика из пластика. Матрица очень маленького размера. Получить приемлемый результат такой камерой можно только в идеальных условиях, т.е. при ярком дневном свете на улице.
Компакты с расширенными настройками отличаются от своих дешевых собратьев наличием режимов приоритета диафрагмы (A или AV), приоритета выдержки (S или TV) и ручного режима (M). Линзы объектива могут быть сделаны из оптического стекла. Матрицы немного больше.
Ультразумы – это все те же компакты с еще более качественной оптикой, которая обладает очень широким диапазоном фокусных расстояний.В ультразумах устанавливают более продвинутую систему автофокуса, экспозамера, доступны расширенные настройки встроенной вспышки, расширенный диапазон ISO. Доступен режим серийной съемки с высокой скоростью.
Резюме: сложно использовать для съемки динамических сюжетов. несменными объективами. Матрица маленькая.
Беззеркальные фотоаппараты
Большинстве обладают матрицами такого же размера, как бюджетные. Есть возможность смены объективов. Электронный, а не оптический видоискатель.
Резюме: Беззеркалки обеспечивают качество изображения, сходное с таковым у зеркалок. Они обладают сменными объективами. Можно наводиться на резкость при помощи экрана. Беззеркалки компактны, но это также вызывает эргономические проблемы – быструю настройку параметров и работу с большими и тяжелыми объективами. У них небольшая по сравнению с зеркалками автономность.
Зеркальные фотоаппараты
Зеркальные фотоаппараты – это устройства, позволяющие полностью контролировать процесс съемки. Аббревиатура зеркалок – DSLR (от англ. DigitalSingle-LensReflexCamera – цифровая однообъективная камера с зеркальным видоискателем). В любой зеркалке изображение через объектив попадает на зеркало, а дальше переотражается в пентапризме.
Зеркальные камеры обладают крупными матрицами формата APS-C (около 24х16 мм) и FF (FullFrame – полнокадровые матрицы с размерами около 36х24 мм). В зеркальных камерах в наличии быстрая фокусировка на основе фазовых датчиков. Благодаря небольшому количеству электроники заряд батареи расходуется экономно и его с легкостью хватает на 700-1000 снимков.
Среднеформатные фотоаппараты как подвид зеркалок
Выше было сказано, что у зеркалок два размера матриц – формата APS-C и FF. Так вот есть еще среднеформатные зеркальные камеры, у которых размер сенсора (матрицы) превышает FF (36х24 мм). Это 45х30 мм, 44х33 мм, 44х36 мм, 48х36 мм, 53.7х40.3 мм и 56х41.5 мм. Такая большая площадь матрицы позволяет добиться феноменального качества изображения, но большие сенсоры стоят очень дорого. Среднеформатные камеры обладают следующими преимуществами: высоким разрешением, низкими шумами, минимальной глубиной резко изображаемого пространства (ГРИП), большой глубиной цвета и динамическим диапазоном, обычные объективы на таких камерах обеспечивают очень широкий угол.
Резюме: Зеркалки обладают отличным видоискателем, большими матрицами, быстрой фокусировкой, огромным парком оптики и всевозможных аксессуаров (вспышек, светофильтров, батарейных блоков и т.п.), выверенной эргономикой и длительным временем работы.
Режимы съемки
P – просто программный режим. Фотоаппарат сам выбирает минимальную выдержку и диафрагменное число (“экспопару”), требуемые для четкого снимка в данных условиях. Можно условно приравнять его к режиму “авто”, с тем лишь исключением, что обычно можно настроить ряд параметров, в отличие от сюжетных программ или режима “авто” (т.е. баланс белого, чувствительность матрицы, настройки jpeg и пр.). Режим абсолютно безмозглый и потому имеющий сомнительную полезность.
A (или Av) – режим приоритета диафрагмы. Пользователь устанавливает требуемое диафрагменное число, а фотоаппарат – выдержку, в соответствии с данными экспонометра. Наиболее любимый большинством фотографов режим, в котором есть возможность полноценного управления глубиной резкости (открытая диафрагма, например, 1.
S(или Tv) – режим приоритета выдержки. Пользователь устанавливает требуемую выдержку, а фотоаппарат – диафрагму. Режим весьма ограниченный и, как правило, применимый при съемке спортивных событий, когда необходимость поймать момент гораздо важнее проработки фона.
M – полностью ручной режим. Пользователь вручную устанавливает все параметры. Обычно автоматическая чувствительность может устанавливаться в первых трех режимах, а в ручном недоступна… ответ прост: этот режим выбирают те, кто экспериментирует или точно знает, что делает. Режим полностью снимает ограничения на ночную съемку, т.к. дает возможность пользователю поставить абсолютно любую выдержку и диафрагму на любом значении чувствительности.
Sv – режим приоритета чувствительности
, сходный с программным режимом (P), но помимо выдержки и диафрагмы, фотоаппарат выбирает чувствительность, с возможностью быстрой коррекции пользователемTAv – режим приоритета диафрагмы и выдержки, когда пользователь устанавливает необходимую диафрагму и выдержку, а фотоаппарат – требуемую чувствительность матрицы
A-Dep – режим приоритета диафрагмы с контролем глубины резкости, применяется для проработки как переднего плана, так и заднего – при этом фотоаппарат замеряет расстояние до того и другого и соответственно выставляет диафрагму (и выдержку).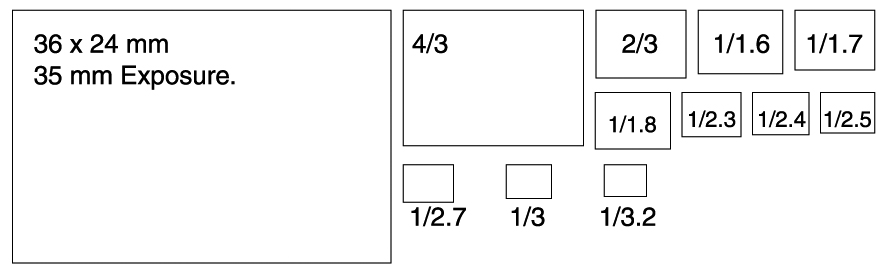
Матрица
В DSLR камерах матрица является светочувствительной поверхностью, на которой через объектив попадает свет и преобразуется в электронные импульсы, а после обработки процессором, сохраняются на карте памяти как фотографии в виде цифрового кода. Можно сказать функцией матрицы является оцифровка света попавшего на его поверхность, называется ещё и сенсор, фотодатчик.
Матрица фотоаппарата состоит из датчиков пикселей, от количества пикселей зависит разрешение цифрового изображения, чем больше пикселей, тем выше детализация кадра, тем чётче будут видны маленькие детали. Количество пикселей на DSLR камерах обозначается словом Megapixel. Современные фото датчики цифровых фотоаппаратов имеют 8-24 миллионов пикселей. Если в характеристиках DSLR камеры написано, что самый большой размер изображение 5616 на 3744, то получается, что разрешение матрицы фотоаппарата 22 мегапиксель (5616×3744=21026304).
Физический размер матрицы — одна из важнейших характеристик фотоаппарата, который непосредственно влияет на качество изображение. Из названия уже понятно, что речь о геометрических размерах а длина и ширина сенсора измеряется в миллиметрах, в характеристиках некоторых камер размер обозначается как диагональ матрицы в дюймах как 2/3″. Величина в дюймах указывается обратная величина, и поэтому при покупке камеры нужно выбрать ту, у которой число после дроби меньше.
Из названия уже понятно, что речь о геометрических размерах а длина и ширина сенсора измеряется в миллиметрах, в характеристиках некоторых камер размер обозначается как диагональ матрицы в дюймах как 2/3″. Величина в дюймах указывается обратная величина, и поэтому при покупке камеры нужно выбрать ту, у которой число после дроби меньше.
Светочувствительность – это свойство светочувствительного материала, то есть пленки или матрицы. Светочувствительность указатель того, как быстро материал «впитывает» свет. По мировым стандартам светочувствительность обозначается ISO. Чем выше ISO, тем меньше требуется света для съёмки и способность камеры снимать в условиях с низкой освещенностью повышается.
Типы матриц фотоаппаратов
Сегодня мировые гиганты в своих DSLRах используют сенсоры двух типов. Первая – это ПЗС (CCD), вторая — КМОП (CMOS).
ПЗС — прибор с обратной зарядной связью.
КМОП комплементарная логика на транзисторах металл-оксид-полупроводник)
На сегодняшний технология CMOS (ComplementaryMetal-OxideSemiconductor) завоевала более 90% мирового рынка, а технология CCD (Charge-CoupledDevice) уже уходит во второй план.
Преимуществ CMOS-технологии, это низкое энергопотребление. CMOS сенсоры содержат в себе аналого-цифровые преобразователи и усилители, что делает низким стоимость конечного продукта.
Преимуществом CCD является низкий уровень шумов, высокая заполняемость пикселов (около 100%) и большой динамический диапазон
По каким параметрам выбрать фотоаппарат
Какой купить фотоаппарат? Какой выбрать фотоаппарат? Профессиональный или любительский?
Разница в качестве снимков получаемых на профессиональные камеры и на любительские огромна. Что бы понять этот феномен нужно разобраться с терминами. Итак: профессиональная камера это любая камера, которую держит в руках профессионал, любительская камера это любая камера которую держит в руках любитель.
Основные правила помогающие выбрать фотоаппарат
- определенные особенности технической спецификации устройства
- основное назначение фотоаппарата (что, где когда и где будет сниматься)
- степень знания техники фотосъемки
- количество имеющихся денег (цена тушки и парка объективов)
- наличие ранее купленных объективов и аксессуаров фототехники
- личные эстетические предпочтения.
Основные технические характеристики фотоаппарата учитываемые при его покупке
Тип крепления объектива
Байонет — тип крепления сменного объектива, который можно использовать с данной моделью фотоаппарата.
На фотоаппарат со сменным объективом можно устанавливать только те объективы, которые специально предназначены для данной модели. Это связано с разными типами байонета, а также с разной электронной «начинкой» объективов. Как правило, каждый крупный производитель фотоаппаратов разрабатывает свой стандарт сменных объективов, который не совместим со стандартами других производителей.
Если у вас уже имеется набор объективов для фотоаппарата, то при выборе новой модели можно подобрать именно ту, которая будет совместима с ними.
Тип фоточувствительной матрицы, установленной в цифровой камере может быть разным по применяемой технологии, которая напрямую влияет на её характеристики, а также на особенности получаемого изображения.
Матрица фотоаппарата представляет собой массив фоточувствительных элементов (пикселей). С помощью объектива на матрице создается изображение снимаемого объекта. Во время экспозиции (фотосъемки) каждый пиксел накапливает электрический заряд, пропорциональный попавшему на него количеству света. После съемки с каждого фотоэлемента считывается сигнал, переводится в цифру и обрабатывается процессором.
В фотоаппаратах обычно используется один из следующих типов матрицы классифицируемых по применяемой технологии: CCD, CMOS, X-Trans CMOS, BSI CMOS, EXR CMOS и Live MOS. В CCD (Charge-Coupled Device, или ПЗС — прибор с зарядовой связью) при считывании сигнала накопленный заряд сдвигается от одного элемента матрицы к другому, образуя на выходе готовую строку изображения или целый кадр.
- CMOS (Complementary-symmetry/Metal-Oxide Semiconductor), или КМОП-матрица (КМОП — комплементарный металлооксидный полупроводник), состоит из отдельных фотоэлементов и управляющих транзисторов, изготовленных по КМОП-технологии.
 Транзисторы управляют работой фотодатчика и обеспечивают считывание сигнала.
Транзисторы управляют работой фотодатчика и обеспечивают считывание сигнала. - X-Trans CMOS — разработка FUJIFILM совместно с Adobe Systems Incorporated. Обработка фотографий в формате RAW с камер, оснащенных матрицей такого типа, в ПО от Adobe позволяет более эффективно бороться с муаром и корректировать цвета на фотографиях.
- X-Trans CMOS II — новая версия матрицы от FUJIFILM. Благодаря технологиям, использованным при создании данного типа матриц, увеличена скорость фазовой фокусировки, а также еще уменьшен эффект муара.
- Матрицы BSI CMOS (Back Side Illuminated CMOS — сенсор с обратной подсветкой) отличаются от обычных CMOS повышенной светочувствительностью, что позволяет значительно уменьшить количество визуальных шумов при съемке в условиях плохого освещения. Достигается это благодаря тому, что обратная сторона матрицы пропускает больше света, поэтому сенсор как бы устанавливают вверх тормашками.
- EXR CMOS — разработка компании Fujifilm. В матрицах такого типа пиксели расположены в отличной от других типов матриц последовательности.
 Благодаря этому, матрица EXR CMOS может переключать режимы работы в зависимости от условий и требований съемки. Существует три основных режима. HD (высокое разрешение) — используются все пиксели матрицы, достигается максимальное разрешение и четкость. DR (широкий динамический диапазон) — часть пикселей делает снимок с одной экспозицией, часть — с другой, благодаря чему достигается эффект HDR всего с одним снимком (обычно требуется два-три), но разрешение снижается. SN (высокая чувствительность) — пиксели объединяются в пары, благодаря чему улучшается работа матрицы при недостаточном освещении, но также снижается разрешение.
Благодаря этому, матрица EXR CMOS может переключать режимы работы в зависимости от условий и требований съемки. Существует три основных режима. HD (высокое разрешение) — используются все пиксели матрицы, достигается максимальное разрешение и четкость. DR (широкий динамический диапазон) — часть пикселей делает снимок с одной экспозицией, часть — с другой, благодаря чему достигается эффект HDR всего с одним снимком (обычно требуется два-три), но разрешение снижается. SN (высокая чувствительность) — пиксели объединяются в пары, благодаря чему улучшается работа матрицы при недостаточном освещении, но также снижается разрешение. - Live MOS матрица — светочувствительная матрица, выполненная на основе МОП технологии. Live MOS содержит меньшее число соединений для каждого элемента и питается меньшим напряжением. За счёт этого и упрощённой передачи управляющих сигналов имеется возможность получать «живое» изображение при отсутствии традиционного для такого режима работы перегрева и повышения уровня шумов.
Физический размер матрицы имеет прямую связь с форматом. Большинство фотоаппаратов средней ценовой категории и выше имеют матрицу определенного формата: 1″, 4/3 (Four Thirds), APS-C, APS-H, Foveon, Full frame (35мм) или среднеформатную. Если фомат матрицы не указан, то, как правило, речь идет о бюджетном фотоаппарате с нестандартным размером матрицы. Обратите внимание, что размеры одного формата сенсора могут незначительно изменяться от производителя к производителю.
- 1″ (Nikon CX) — относительно небольшая по физическим размерам матрица (13.2×8.8 мм). Устанавливается в компактные камеры Nikon, Sony и Samsung. Кроп-фактор — 2.72.
- APS-C — очень популярный формат матрицы. Размеры сенсора для всех производителей (кроме Canon) — 23.6×15.6 мм. Компания Canon использует матрицы меньшего размера — 22.3×14.9 мм.
- APS-H — формат используется компанией Canon в некоторых топовых зеркальных камерах и имеет размеры 27.
 9×18.6 мм.
9×18.6 мм. - 4/3 (Four Thirds) — популярный формат матрицы для беззеркальных фотоаппаратов типа Four Thirds и Micro Four Thirds («4/3», «m4/3»). Размеры сенсора — 17.3×13 мм, кроп-фактор — 2.0.
- Foveon — формат используется только в фотоаппаратах компании Sigma. Размеры сенсора — 20.7×13.8 мм.
- Full frame (35мм) — полнокадровый сенсор. Часто встречается в топовых зеркальных камерах, размеры сенсора примерно равны 36×24мм.
- Среднеформатный — используется в профессиональной студийной фототехнике.
Разрешение матрицы, выполняющей в цифровых камерах роль фотопленки, т.е. количество расположенных на ней светочувствительных элементов (пикселов, pixels).
Чем больше число пикселов матрицы, тем выше качество получаемых изображений.
От разрешения матрицы зависит максимальный размер, с которым может быть воспроизведено изображение без видимого ухудшения качества. Например, для вывода на принтер отпечатка формата 9×15 см достаточно 2х-3х-мегапиксельной матрицы (2-3 млн элементов), для отпечатка формата A4 нужна 3х-4х-мегапиксельная матрица.
Разрешение современных камер значительно превосходит требуемый минимум, а количество мегапикселов фотоматрицы увеличивается с каждым годом и достигает сегодня 15-20, и более. Увеличение разрешения при неизменном размере матрицы приводит к уменьшению размера пиксела. Это в свою очередь, увеличивает уровень шумов на фотографии. Так что гонка за мегапикселами не всегда идет на пользу качеству.
Значение кроп-фактора цифрового фотоаппарата.
Коэфициент обрезки определяется как отношение диагоналей кадра 35-миллиметровой пленки (24×36 мм) и матрицы цифровой камеры.
Если сравнить два фотоаппарата — один с полнокадровым сенсором 24×36 мм и второй — с меньшим сенсором и кроп-фактором, большим единицы, — то при использовании одинаковых объективов у второго аппарата поле зрения будет меньше, чем у первого. Это объясняется простой геометрией. Поскольку угол зрения обычно оценивается по фокусному расстоянию объектива 35 мм камеры, для цифровых камер ввели понятие «эквивалентного фокусного расстояния». Оно равно произведению фокусного расстояния объектива на кроп-фактор. Эквивалентное фокусное расстояние по сути дела определяет угол зрения камеры.
Оно равно произведению фокусного расстояния объектива на кроп-фактор. Эквивалентное фокусное расстояние по сути дела определяет угол зрения камеры.
Зная значение кроп-фактора для цифровых фотоаппаратов со сменным объективом, можно легко определить, какое эквивалентное фокусное расстояние (угол обзора) и эквивалентную диафрагму вы получите при установке того или иного объектива.
При выборе объективов также стоит обратить внимание на кроп-фактор. В продаже можно найти специальные объективы для работы с цифровыми камерами, у которых кроп-фактор больше единицы. Такие объективы нежелательно использовать с 35 мм камерами.
Для большинства цифровых зеркальных камер кроп-фактор лежит в пределах 1.3-2.0. Чем меньше значение кроп-фактора, тем больше размер фотоматрицы (см. «Физический размер матрицы») и тем больше площадь одного пикселя (при заданном разрешении матрицы), меньше уровень шумов.
Размер светочувствительной матрицы фотоаппарата определяет размер и площадь наименьшего светочувствительного элемента — пикселя. Чем больше площадь матрицы, тем больше площадь пикселя (при одинаковом разрешении матрицы, конечно). При увеличении площади пикселя увеличивается светочувствительность, и динамический диапазон матрицы, уменьшаются шумы. Увеличение размера матрицы, как правило, приводит к повышению ее стоимости, поэтому большие матрицы с большой диагональю используются только в профессиональной технике. Размер матриц для недорогих малогабаритных камер обычно указывается как условный диаметр передающей трубки, в которую матрица могла бы вписаться и измеряется в долях дюйма. Для больших матриц указывается размер по двум осям в миллиметрах.
Чем больше площадь матрицы, тем больше площадь пикселя (при одинаковом разрешении матрицы, конечно). При увеличении площади пикселя увеличивается светочувствительность, и динамический диапазон матрицы, уменьшаются шумы. Увеличение размера матрицы, как правило, приводит к повышению ее стоимости, поэтому большие матрицы с большой диагональю используются только в профессиональной технике. Размер матриц для недорогих малогабаритных камер обычно указывается как условный диаметр передающей трубки, в которую матрица могла бы вписаться и измеряется в долях дюйма. Для больших матриц указывается размер по двум осям в миллиметрах.
Минимальная чувствительность ISO
Минимальная светочувствительность элементов матрицы цифрового фотоаппарата, указывается в единицах системы ISO.
Каждая светочувствительная матрица обладает определенными физическими характеристиками, которые определяют ее рабочий диапазон чувствительности. В этом диапазоне матрица передает картинку с минимальными искажениями и допустимым уровнем шума. Чем шире этот диапазон (больше максимальное и меньше минимальное значение чувствительности), тем больше возможностей для сюжетной съемки у цифрового фотоаппарата.
Чем шире этот диапазон (больше максимальное и меньше минимальное значение чувствительности), тем больше возможностей для сюжетной съемки у цифрового фотоаппарата.
Максимальная светочувствительность элементов матрицы цифрового фотоаппарата.
Световая чувствительность представляет собой величину световой энергии, необходимую для получения изображения. Она указывается в единицах системы ISO и может принимать значения 100, 200, 400, 800 и т. п. по аналогии с фотопленкой, в определенном интервале. Чем выше число ISO, тем выше чувствительность. Фотограф в зависимости от условий съемки может выставить то или иное значение чувствительности. Чем шире диапазон чувствительности фотоматрицы, тем больше возможностей для съемки у фотоаппарата.
Съемки в условиях низкой освещенности, съемки быстродвижущихся объектов (спорт) требуют более высокой светочувствительности, чем съемка неподвижных объектов при солнечной погоде. Однако при увеличении чувствительности матрицы одновременно повышается зашумленность изображения (т. е. появляется большое количество точек на изображении, яркость или цвет которых существенно отличаются от усредненного цвета объекта).
е. появляется большое количество точек на изображении, яркость или цвет которых существенно отличаются от усредненного цвета объекта).
Максимальная светочувствительность показывает, насколько может быть чувствительна фотоматрица.
Битовая
глубина цветаЧисло бит, применяемых для представления цвета каждого пиксела изображения.
Цвет каждого пиксела кодируется определенным числом бит (bit), то есть элементарных единиц информации. В зависимости от того, сколько бит отведено для цвета каждого пиксела, возможно кодирование различного числа цветов. Таким образом, глубина цвета позволяет определить, какое максимальное количество цветов может быть реализовано в изображении. Например, если глубина цвета составляет 24 бит/пиксел, то потенциальное изображение может содержать до 16.8 млн различных цветов и оттенков. Очевидно, что чем больше цветов используется для электронного представления изображения, тем точнее информация о цвете каждой его точки (т.е. его цветопередача).
Для современных цифровых фотоаппаратов глубина цвета 24 бит/пиксел считается нормой. Если же необходима академическая точность в передаче цвета, то глубина цвета должна составлять не менее 30 бит/пиксел.
Тип стабилизатора изображения, используемого при фотосъемке.
Стабилизация изображения позволяет компенсировать дрожание рук при съемке и получить четкий несмазанный снимок. Эффект дрожания становится особенно заметен при фотографировании с большим увеличением (zoom) или с большой выдержкой. Стабилизаторы изображения бывают оптические и цифровые, также возможно их сочетание (двойной стабилизатор).
В оптическом стабилизаторе изображения для компенсации дрожания рук используется перемещение одного из элементов оптической системы фотоаппарата или сдвиг фотоматрицы (см. «Система стабилизатора»). Специальный датчик определяет сдвиг корпуса объектива. После этого происходит изменение в оптической схеме или сдвиг матрицы. Это компенсирует микросмещение фотоаппарата, и проецируемое на матрицу изображение остается неподвижным.
Это компенсирует микросмещение фотоаппарата, и проецируемое на матрицу изображение остается неподвижным.
В режиме цифровой стабилизации автоматика камеры выставляет максимальное допустимое значение чувствительности фотоматрицы (ISO) для конкретных условий съемки. При этом значение выдержки автоматически уменьшается. Малое время выдержки делает возможным получение несмазанных снимков даже при небольших колебаниях фотоаппарата во время съемки.
Нужно отметить, что цифровой стабилизатор может помочь далеко не во всех случаях, поэтому для получения качественных снимков лучше ориентироваться на оптическую систему стабилизации.
Двойной стабилизатор изображения представляет собой комбинацию оптического и цифрового стабилизаторов.
Конструкция механического стабилизатора изображения в цифровом фотоаппарате.
Стабилизация изображения позволяет компенсировать дрожание рук при съемке и получать четкое несмазанное изображение (см.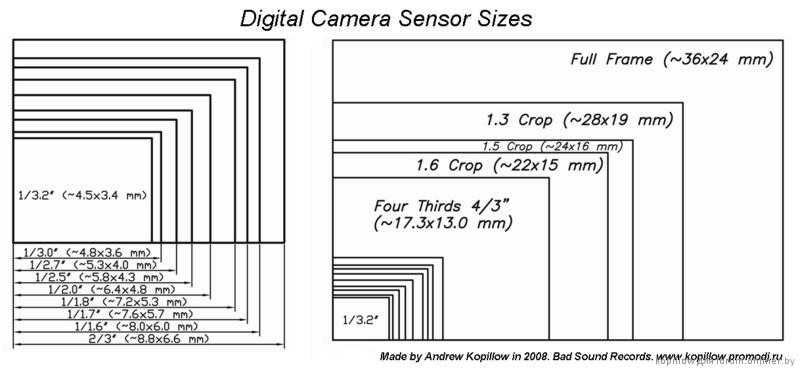 «Стабилизатор изображения (фотосъемка)»).
«Стабилизатор изображения (фотосъемка)»).
Все современные системы механической стабилизации можно разделить на два типа. В первой системе для компенсации дрожания фотоаппарата используется подвижный элемент в объективе, а во втором — сдвиг фоточувствительной матрицы.
Стабилизация со сдвигом матрицы не вносит дополнительных искажений в получаемое изображение и не влияет на светосилу объектива. В зеркальных фотоаппаратах с такой системой стабилизации можно использовать любые объективы.
Стабилизатор изображения с активным элементом в объективе считается более эффективным за счет более высокой скорости работы.
Использование стабилизатора повышает энергопотребление камеры и может помешать фотосъемке (при съемке с «проводкой»). Стабилизатор не эффективен при съемке на больших фокусных расстояниях и длительных выдержках.
Максимальное расстояние, которое способна осветить встроенная фотовспышка для получения качественной фотографии.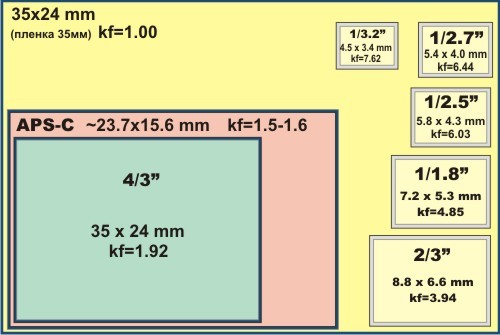
Максимальное расстояние действия вспышки определяется мощностью излучателя вспышки, поэтому закономерно, что для суперкомпактных камер максимальная дальность встроенной фотовспышки будет меньше, чем у более габаритных фотоаппаратов.
Наличие в камере встроенной лампы-вспышки, которая включается одновременно с открытием затвора и освещает объект в момент съемки.
Вспышка позволяет фотографировать в условиях недостаточной освещенности, например, вечером, избежать отображения тени на лице и т.д.
Большинство современных моделей цифровых фотоаппаратов оснащено встроенной вспышкой. Встроенная вспышка может отсутствовать у очень компактных или бюджетных моделей, а также у некоторых моделей высокого класса, рассчитанных исключительно на работу с внешним освещением.
Наличие на корпусе специального разъема (синхроконтакта) для подключения внешней вспышки.
С помощью этого разъема можно подключить нестандартную фотовспышку, которая несовместима с «горячим башмаком», установленным на фотоаппарате. Синхроконтакт часто используется для подключения внешней вспышки при съемке в студийных условиях.
Синхроконтакт часто используется для подключения внешней вспышки при съемке в студийных условиях.
Наличие в фотоаппарате режима брекетинга вспышки.
Брекетинг фотовспышки — это автоматический режим серийной съемки, при котором мощность вспышки для каждого кадра изменяется на некоторую величину вверх или вниз от среднего значения. Среднее значение определяется автоматикой.
Такой режим съемки может использоваться в случаях, когда трудно определить точную экспозицию, а также для получения специальных эффектов.
Наличие системы двух объективов (иногда двух пар объективов и матриц), позволяющих производить съемку фото и видео с возможностью просмотра отснятого материала в 3D-формате. 3D-съемка также может быть реализована на программном уровне, то есть при помощи специального алгоритма, переводящего обычные фотографии в трехмерный формат.
Для получения объемного изображения необходимо записать два отдельных кадра (стереопара) с ракурсами для левого и правого глаза и показать каждый кадр для «своего» глаза.
Существует три наиболее распространенных метода демонстрации объемного изображения. Самый простой и недорогой в реализации — это цветовое кодирование изображений. Для получения эффекта необходимо использовать специальные анаглифные очки, в которых вместо стекол используются светофильтры (как правило для левого глаза — красный, а для правого синий). Стереопара кодируется в одну фотографию, в которой в красном канале изображена левого глаза, а в синем для правого. При просмотре каждый глаз видит изображение того цвета, которое соответствует цвету своей линзы. Недостатком такого метода является неполная цветопередача, а также дискомфорт при длительном просмотре изображений или видео.
Наиболее распространенный бытовой способ получения качественного объемного изображения — использование очков с жидкокристаллическими прерывателями. Для просмотра необходимо устройство воспроизведения или отображения, с поддержкой 3D. На экран попеременно выводятся изображения для левого и правого глаза, а синхронизированные очки в момент показа картинки для левого глаза закрывают правый и наоборот.
Также качественного эффекта можно добиться при использовании поляризационных очков. В данном случае в очках для каждого глаза используются различные поляризующие светофильтры (с вертикальной и горизонтальной поляризацией или с левой и правой круговой поляризацией). Изображение для каждого глаза выводится на отображающее устройство с соответствующей определенному глазу поляризацией.
Скорость съемки в режиме серийной съемки. Подробнее про этот режим см. в разделе «Режим серийной съемки».
Скорость съемки определяется скоростью работы затвора и цифровой системой обработки изображения. Чем выше эта скорость, тем больше фотографий интересующего вас события вы успеете сделать.
У компактных цифровых фотоаппаратов скорость быстрой съемки обычно лежит в диапазоне 1 — 3 кадра в секунду. Профессиональные и полупрофессиональные цифровые зеркальные камеры способны снимать до 10 кадров в секунду, и более.
Обратите внимание, что при быстрой съемке производители фотоаппаратов применяют различные методики обработки снимков. Это значит, что качество таких снимков может отличаться от качества при обычной съемке.
Это значит, что качество таких снимков может отличаться от качества при обычной съемке.
Часто производители дают возможность изменять различные параметры быстрой съемки, что позволяет пользователю наиболее точно настроить съемку под конкретные задачи.
Максимальное количество снимков, которое можно сделать одной серией и сохранить в формате RAW.
Под серийной съемкой понимается возможность фотоаппарата делать несколько кадров подряд с минимальным интервалом (см. «Режим серийной съемки»). Максимальное число снимков в серии ограничивается работой электроники фотоаппарата.
Чем больше кадров в одной серии может сделать фотоаппарат, тем больше возможности у фотографа «поймать» интересное событие.
RAW — формат изображений, позволяющий сохранять необработанные данные о фотографии без сжатия или со сжатием без потерь. Максимальная серия снимков при сохранении изображения в формате JPEG обычно намного больше, чем тот же показатель для формата RAW.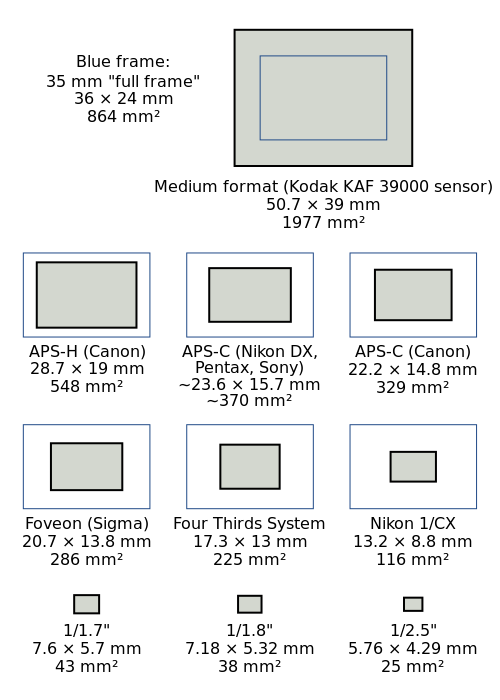 Поэтому, если вам требуется получить длинную серию, то выбирайте сохранение в формате JPEG.
Поэтому, если вам требуется получить длинную серию, то выбирайте сохранение в формате JPEG.
Максимальное количество снимков, которое можно сделать одной серией и сохранить в формате JPEG. Приводится значение, соответствующее максимальной скорости съемки (см. «Скорость быстрой съемки»).
Под серийной съемкой понимается возможность фотоаппарата делать несколько кадров подряд с минимальным интервалом (см. «Режим серийной съемки»).
Максимальное число снимков в серии ограничивается работой электроники фотоаппаратов.
Чем больше кадров в одной серии может сделать фотоаппарат, тем больше возможности у фотографа «поймать» интересное событие.
Отметим, что в некоторых фотоаппаратах пользователь может сам выбирать режимы быстрой съемки, выбирать длину серии и скорость съемки в пределах технических возможностей фотоаппарата.
Time-lapse — режим съемки, при котором кадры делаются через значительный промежуток времени (от нескольких секунд до десятков минут). При воспроизведении с нормальной частотой кадров такой ролик кажется ускоренным, охватывающим большой промежуток времени. Наиболее типичные сюжеты для такого режима съемки: распускающийся цветок и рассвет/закат, показанные за несколько секунд.
При воспроизведении с нормальной частотой кадров такой ролик кажется ускоренным, охватывающим большой промежуток времени. Наиболее типичные сюжеты для такого режима съемки: распускающийся цветок и рассвет/закат, показанные за несколько секунд.
Промежуток времени с момента нажатия на кнопку включения до момента, когда фотоаппарат будет полностью готов к работе.
Время включения варьируется от нескольких секунд у «медленных» камер до десятых долей секунд у «быстрых» аппаратов.
Разрешение электронного видоискателя фотоаппарата.
Видоискатель — это оптическое устройство, которое позволяет видеть то, что будет снято фотоаппаратом.
Электронный видоискатель представляет собой миниатюрный LCD-экранчик с линзой (окуляром), установленный внутри камеры. На нем отображается будущий кадр таким, каким его «видит» светочувствительная матрица через объектив камеры.
Чем больше разрешение ЖК-матрицы у видоискателя (и больше число пикселов), тем более подробное и детальное изображение увидит фотограф.
Размер жидкокристаллического дисплея по диагонали. По сложившейся традиции он указывается в дюймах (1 дюйм = 2.54 см). Большинство камер имеют LCD-экран размером от 3 до 6 см. Чем больше размер ЖК-дисплея, тем удобнее просматривать сделанные фотографии и разбираться с многочисленными настройками фотоаппарата.
Число точек LCDЧисло точек LCD-экрана. Чем оно выше, чем четче и качественнее получается изображение и соответственно, тем комфортнее работать с таким экраном. Для большинства цифровых фотоаппаратов число точек ЖК-дисплея лежит в диапазоне от 120000 до 921000.
Стоит учесть, что большинство производителей цифровых фотоаппаратов под «числом точек экрана» имеют ввиду не число пикселей, а число субпикселей. Для формирования одного пикселя обычно используется три субпикселя базовых цветов: красный, зеленый и синий. Поэтому, чтобы узнать реальное число пикселей экрана, нужно число его точек разделить на три.
Наличие у фотоаппарата поворотного экрана. Может поворачиваться как отдельно экран, так и вся задняя панель аппарата. Экран может поворачиваться вокруг своей оси на 90 градусов или же открываться в сторону, как у видеокамер.
Может поворачиваться как отдельно экран, так и вся задняя панель аппарата. Экран может поворачиваться вокруг своей оси на 90 градусов или же открываться в сторону, как у видеокамер.
Наличие в цифровом фотоаппарате сенсорного (чувствительного к нажатию) жидкокристаллического экрана.
В большинстве аппаратов для выбора различных настроек используются отдельные кнопки, расположенные на задней панели около ЖК-экрана. В моделях с сенсорным экраном эти кнопки отсутствуют. Такой дисплей позволяет переключаться по меню камеры нажатием на определенные участки самого экрана. Это дает возможность увеличить экран и занять им практически всю заднюю панель фотоаппарата.
Использование сенсорного экрана делает интуитивно понятным управление и навигацию по многочисленным меню фотоаппарата.
Минимальное значение выдержки затвора фотоаппарата.
Выдержка — время, в течение которого затвор фотоаппарата остается открытым и пропускает лучи света к светочувствительной матрице.
Наряду с диафрагмой этот параметр определяет количество света, попавшего на матрицу, и, соответственно, правильность экспозиции. Для хорошо освещенных объектов и для съемки движущихся объектов выдержка должна быть очень маленькой.
Чем меньше минимальное значение выдержки, тем больше возможностей для сюжетной съемки у цифрового фотоаппарата.
Максимальное значение выдержки затвора фотоаппарата.
Выдержка — это время, в течение которого затвор фотоаппарата остается открытым для получения кадра.
Наряду с диафрагмой этот параметр определяет количество света, попавшего на светочувствительную поверхность (матрицу), и, соответственно, правильность экспозиции. Для ночной съемки или при большом F-числе (см. «Диафрагменное число (F), мин», «Диафрагменное число (F), макс») выдержка должна быть большой.
Диапазон возможных значений выдержки каждого фотоаппарата задан в соответствии с его техническим решением. Чем больше максимальное значение выдержки, тем больше возможностей для сюжетной съемки у цифрового фотоаппарата.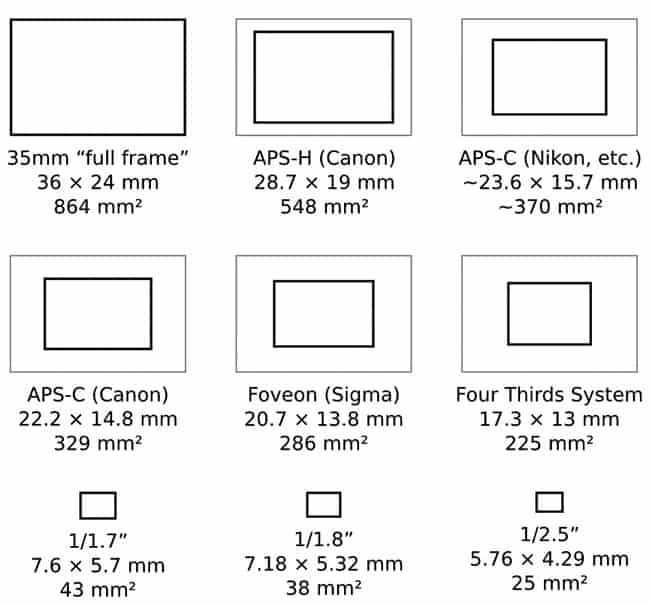
Выдержка для X-Sync
Минимальное значение выдержки, при которой затвор фотоаппарата полностью открывает кадр.
X-Sync — это режим работы с электронными фотовспышками, при котором сигнал для срабатывания вспышки подается точно в момент полного открытия затвора.
Механические затворы со шторками работают таким образом, что на очень коротких выдержках кадр не бывает полностью открыт, затвор открывает свету щель, которая «пробегает» по кадру. Так как время свечения вспышки меньше времени, на которое затвор открывает кадр, то короткий световой импульс вспышки осветит только ту часть кадра, над которой в момент срабатывания вспышки находилась щель затвора, то есть будет освещена только часть кадра.
Таким образом, снимать со вспышкой в режиме X-Sync на выдержках, меньших выдержки для X-Sync, не рекомендуется. Чем меньше это значение, тем шире диапазон выдержек для работы со вспышкой и больше возможностей у фотографа для реализации своих идей.
Работа системы замера экспозиции фотоаппарата в общем режиме.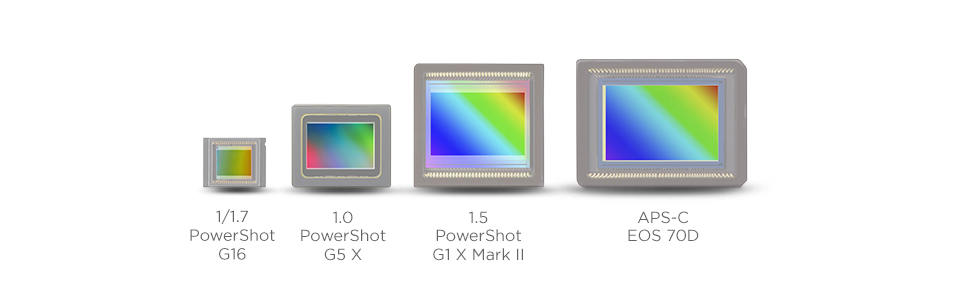
Замер экспозиции — это вычисление необходимого количества света для получения качественного снимка. Замер производится фотоаппаратом перед каждым снимком, в результате чего вычисляются требуемые выдержка и диафрагма.
Существует несколько режимов замера экспозиции. Каждый из режимов лучше подходит для определенных условий съемки.
В режиме общего замера используется информация с нескольких датчиков. При вычислении экспозиции полученные данные сравниваются с базой типичных композиций кадра. После этого выбирается наилучшая экспозиция для определенного типа кадра.
Наличие функции электронного дальномера.
Данная функция помогает при использовании ручной фокусировки. Принцип действия схож с дальномерными фотоаппаратами, но конкретная реализация и функциональность зависит от производителя устройства и модели.
Функция коррекции автофокуса позволяет увеличить точность фокусировки путем ее тонкой настройки. Кроме этого, для наиболее популярных объективов в памяти камеры могут быть предустановленные настройки.
Кроме этого, для наиболее популярных объективов в памяти камеры могут быть предустановленные настройки.
Тип системы автофокуса фотоаппарата.
За время существования автофокуса было изобретено несколько типов автофокусировки. Все началось с активного автофокуса с помощью ультразвуковых волн, а потом и инфракрасных. Сегодня эти способы не используются — они уступили место пассивному автофокусу. Он, в свою очередь, может быть контрастным, фазовым или гибридным.
Контрастный автофокус распространен среди беззеркальных камер. Процессор камеры анализирует текущую картинку с матрицы и начинает двигать линзы в одну из двух возможных сторон. Если после сдвига линз картинка более контрастная (четкая), то движение линз продолжается до нахождения нужной фокусировки. Если изображение ухудшилось, то движение линз происходит в обратную сторону, опять же, до достижения нужной фокусировки. Сильной стороной контрастного автофокуса является точная фокусировка в темных и малоосвещенных сценах.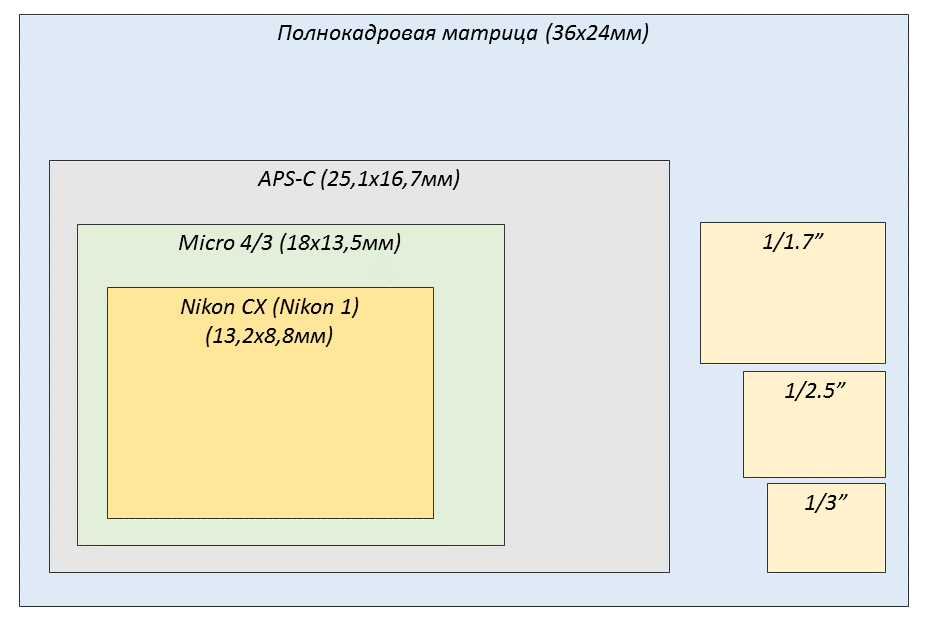
Фазовый автофокус наиболее часто применяется в зеркальных фотоаппаратах. Для его работы необходимы специальные датчики, которые могут находиться непосредственно в матрице фотоаппарата или отдельно. Датчики получают фрагменты светового потока от разных точек кадра с помощью зеркал. После этого датчик посчитает как надо сдвинуть линзы, чтобы получить четкое изображение. Когда два световых потока будут находиться друг от друга на определенном расстоянии, заданном конструкцией датчика, будет достигнут искомый фокус. Фазовой автофокус может похвастаться отличной скоростью фокусировки.
Гибридные системы автофокуса встречаются редко. Такой автофокус совмещает положительные стороны как контрастного, так и фазового автофокуса. Гибридная система внедряется как в беззеркальные, так и в зеркальные камеры. В зеркальных камерах она работает в режиме Live View.
Современные камеры имеют различное количество линейных точек, по которым происходит фокусировка при съемке. За процесс фокусировки отвечает модуль фокусировки. Он фокусируется в тех зонах кадра, которые попадают в поле зрения точек. Количество таких точек у фотоаппарата влияет на точность вычисления нужного объекта фокусировки во время съемки и удобство при настройке ручного режима фокусировки.
За процесс фокусировки отвечает модуль фокусировки. Он фокусируется в тех зонах кадра, которые попадают в поле зрения точек. Количество таких точек у фотоаппарата влияет на точность вычисления нужного объекта фокусировки во время съемки и удобство при настройке ручного режима фокусировки.
Линейные точки могут быть горизонтальной и вертикальной ориентации. Эффективность их применения зависит во многом от фотографируемых объектов. Точки с горизонтальной ориентацией хорошо фокусируются на объектах с вертикальными линиями. Точки в вертикальной ориентации, в свою очередь, лучше фокусируются на объектах с горизонтальными линиями.
Микрофонный вход
При съемке видео одним из главных критериев является захват качественного звука. Силами встроенного в камеру микрофона достичь хорошего звучания на видео будет достаточно проблематично из-за присутствия посторонних шумов (ветер, гул аудитории). Для решения данной проблемы, производители фотоаппаратов оснащают свои модели разъемом для подключения внешнего микрофона, с которого и происходит запись звука.
Этот интерфейс можно использовать мониторинга звука через наушники во время видеозаписи. Обычно в качестве разъема применяется mini jack 3.5 mm.
Для получения качественного звука при записи видео рекомендуется использовать внешний микрофон и другие аксессуары.
Число возможных уровней сжатия изображений при их сохранении в формате JPEG. JPEG — самый распространенный формат записи, предусматривающий сжатие изображения с целью экономии памяти. Однако компактность изображений достигается за счет потери качества, так как формат JPEG при компрессии распознает некоторые данные как неважные и отбрасывает их в ходе сжатия. Чем выше степень сжатия изображений, тем больше фотографий может уместиться на карте памяти, но тем хуже будет их качество. Во многих фотоаппаратах степень сжатия, а следовательно, и качество изображений, можно контролировать. Варьируя уровни сжатия, можно сохранить либо больше фотографий, но более низкого качества, либо меньше фотографий, но их качество при этом будет выше.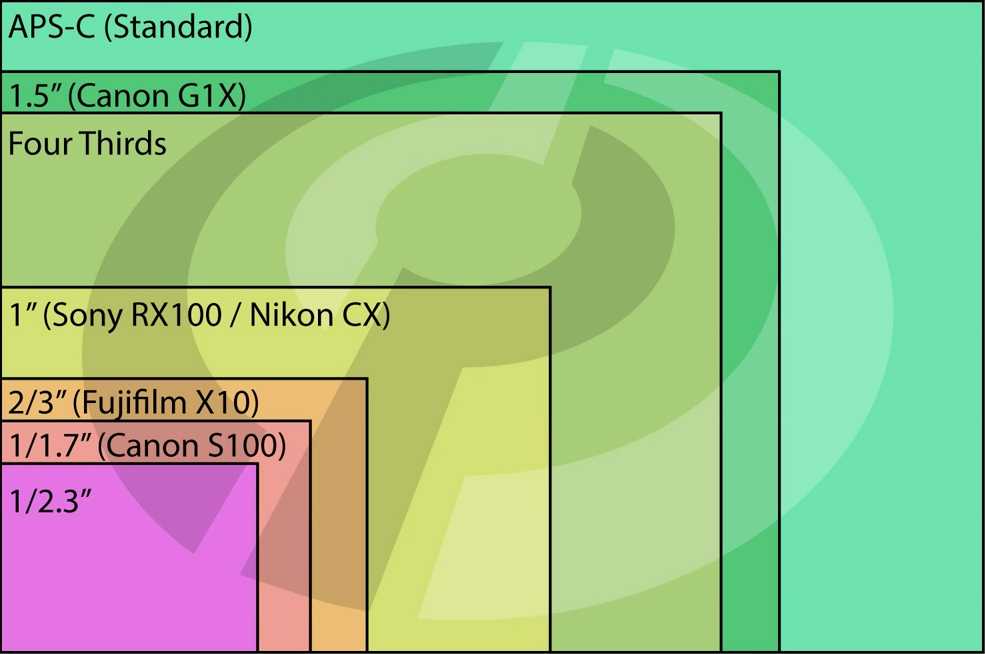
Возможность использования в фотоаппарате сменных карт памяти формата Memory Stick.
Memory Stick — формат карт флэш-памяти, представленный компанией Sony, который используется в основном в цифровых фотоаппаратах этого производителя. На данный момент это один из наиболее дорогих из существующих носителей. Помимо стандарта Memory Stick, существуют другие разновидности: Memory Stick Pro, Memory Stick Duo.
Размеры Memory Stick составляют 50×21.5×2.8 мм.
Возможность использования в фотоаппарате сменных карт памяти формата Memory Stick Duo.
Данный стандарт памяти разрабатывался и поддерживается компанией Sony. Корпус у этой карты весьма компактный достаточно прочный. Memory Stick Duo был разработан на базе широко распространенного стандарта Memory Stick от той же Sony, но несовместим с ней разъемом и отличается малыми размерами (20х31х1.6 мм). Для того чтобы использовать карту Memory Stick Duo с устройством, имеющим слот Memory Stick, необходимо использовать специальный переходник.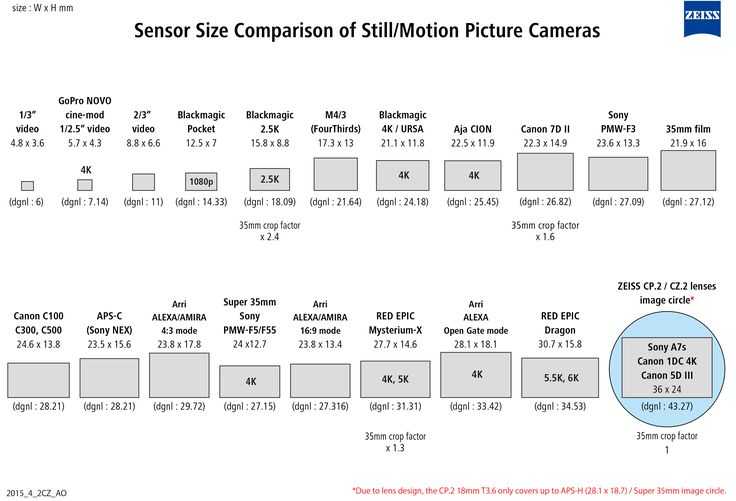
Возможность использования в фотоаппарате сменных карт памяти формата XQD.
Карты памяти были анонсированы в 2011 году, их главное отличие от других карт — высокая скорость передачи данных (до 125 Мб/с).
Карты этого стандарта имеют размеры 38.5 x 29.8 x 3.8 мм.
Максимальный объем карты памяти, с которой может работать фотоаппарат.
Чем выше значение этого параметра, тем большего объема карту вы сможете использовать, следовательно, сможете записать на нее больше снимков и видеороликов. Если у вас уже есть подходящая по типу флэш-карта большой емкости, перед покупкой фотоаппарата следует убедиться, что выбранная модель поддерживает карты такого объема.
Наличие на камере композитного видеоинтерфейса.
Композитный интерфейс предназначен для передачи изображения на любое устройство отображения видеоинформации.
Видеовыход используется для просмотра фотографий и видеороликов через телевизор или для записи на видеомагнитофон.
Для передачи изображения с высоким разрешением на HDTV-устройства рекомендуется использовать HD-выход.
Возможность подключения фотоаппарата к компьютеру и другим устройствам через беспроводной интерфейс Bluetooth.
Технология Bluetooth использует радиосвязь малой дальности и позволяет установить высокоскоростное беспроводное соединение на расстоянии до 10 метров.
С помощью Bluetooth можно передавать файлы с фотоаппарата на компьютер, а также напрямую распечатать фотографии на специальном принтере, оснащенном Bluetooth-адаптером.
Поддержка технологии NFC.
NFC (Near Field Communication) — это технология беспроводной связи малого радиуса действия. NFC позволяет двум устройствам, находящимся недалеко друг от друга (на расстоянии не более 10 см), обмениваться данными.
Емкость встроенного в фотоаппарата аккумулятора.
Более емкий аккумулятор дает возможность сделать больше фотоснимков без подзарядки.
Максимальное разрешение записи видеоролика
Максимальное разрешение записи видеоролика в камере с возможностью записи видео.
Чем выше разрешение ролика, тем более четкое и детальное видеоизображение можно получить. Функция записи видеоизображения на цифровом фотоаппарате не является основной, она служит скорее приятным дополнением к основным функциям.
Наличие функции электронной стабилизации во время записи видеоролика.
При съемке видео колебания фотоаппарата приводят к дрожанию снятого изображения. Поскольку съемка в большинстве случаев происходит с рук, с этой проблемой вам придется сталкиваться довольно часто.
Функция электронной стабилизации реализуется через цифровую обработку изображения с помощью встроенного процессора. Для формирования кадра используется только часть изображения с фоточувствительной матрицы — из общего изображения вырезается видеокадр. При тряске отслеживается смещение изображения, и видеокадр соответственно перемещается вверх или вниз в пределах всего поля изображения с фотоматрицы для компенсации этого смещения. В результате записанное изображение (видеокадр) для зрителя остается неподвижным.
В результате записанное изображение (видеокадр) для зрителя остается неподвижным.
Использование стабилизации позволяет избавиться от неприятных эффектов далеко не во всех случаях.
Максимальное число кадров в секунду при съемке видео разрешением 3840х2160 пикселов.
Частоты 25 и 50 кадров в секунду являются стандартными в странах с системами телевещания PAL и SECAM (Европа, Азия, Россия), в то время, как частоты 30 и 60 кадров в секунду распространены в странах со стандартом вещания NTSC (США, Канада, Мексика, Японии, Филиппинах и ряд стран Южной Америки).
Поддержка фотоаппаратом этих наборов частот может зависеть от страны, для которой фотоаппарат произведен. Многие фотоаппараты универсальны: независимо от региона, в них имеется одновременная поддержка частот 25/30 (50/60) кадров в секунду.
Возможность сохранять снятый видеоролик в формате MOV.
При описании стандартов для цифрового видео обычно используют два понятия — видеокодек и видеоконтейнер. Под кодеком подразумевают метод, с помощью которого производится сжатие видеоинформации, а под контейнером — расширение файла. От типа контейнера зависит то, какие программы смогут воспроизводить этот файл, от типа кодека — степень сжатия информации, качество изображения.
Формат (или контейнер) MOV был предложен компанией Apple. Для просмотра видеороликов в этом формате обычно используется программа QuickTime.
Возможность сохранять снятый видеоролик в формате AVI.
При описании стандартов для цифрового видео обычно используют два понятия -видеокодек и видеоконтейнер. Под кодеком подразумевают метод, с помощью которого производится сжатие видеоинформации, а под контейнером — расширение файла. От типа контейнера зависит то, какие программы смогут воспроизводить этот файл, от типа кодека — степень сжатия информации, качество изображения.
MP4 — формат мультимедийного контейнера, который может содержать аудио- и видеопотоки, а также другую информацию. Для сжатия видеоинфомации обычно используются кодеки из семейства MPEG-4.
Возможность сохранять снятый видеоролик, используя кодек MJPEG.
При описании стандартов для цифрового видео обычно используют два понятия — видеокодек и видеоконтейнер. Под кодеком подразумевают метод, с помощью которого производится сжатие видеоинформации, а под контейнером — расширение файла. От типа контейнера зависит то, какие программы смогут воспроизводить этот файл, от типа кодека — степень сжатия информации, качество изображения.
При работе кодека MJPEG (Motion JPEG) обработка каждого кадра происходит отдельно, и качество видео при этом не зависит от динамичности сцены. Но за это приходится платить значительно большим размером видеофайла.
Видео, созданное кодеком MJPEG, по сравнению с MPEG4 (см «Использование видеокодека MPEG4») намного лучше подходит для последующего монтажа, так как кадры не зависят друг от друга и вставлять (или вырезать) фрагменты видео можно начиная с любого кадра.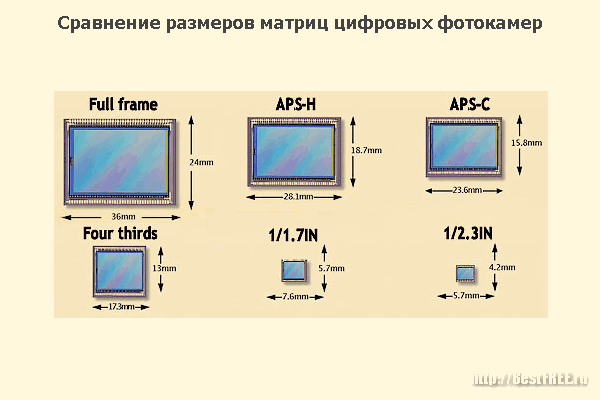
Съемка фотографий с эффектом HDR позволяет создавать качественные фотографии в сложных условиях освещения, когда в кадре есть как ярко освещенные участки, так и затемненные объекты. Для наиболее качественного создания данного эффекта фотоаппарат автоматически делает 2-3 кадра с разными настройками и склеивает их в один.
Датчик ориентацииНаличие в цифровом фотоаппарате специального датчика, который определяет ориентацию камеры (горизонтальная или вертикальная) во время съемки.
Благодаря этому датчику появляется возможность автоматически перевернуть фотоизображения и видеоролики, снятые в вертикальном положении, при их воспроизведении на экране телевизора или при передаче в компьютер. В последнем случае потребуется специальное программное обеспечение, поставляемое вместе с камерой.
Помимо этого, информация о положении камеры используется автоматикой при определении экспозиции и баланса белого.
Наличие защиты от низких температур у фотоаппарата.
Некоторые цифровые фотоаппараты оснащены защитой от воздействия низких температур. Такие модели подойдут для работы в плохую погоду.
Наличие защиты от пыли существенно влияет на выбор фотоаппарата.
Некоторые цифровые фотоаппараты оснащены защитой от воздействия пыли. Такие модели подойдут для работы в плохую погоду.
Наличие влагонепроницаемого корпуса у цифрового фотоаппарата.
Влагонепроницаемый корпус часто имеют зеркальные камеры. Некоторые модели с влагонепроницаемым корпусом допускают кратковременное погружение в воду.
Вес камеры и объектива иногда ведущий фактор при выборе фотоаппарата.
Цифровой фотоаппарат — достаточно мобильное устройство: его берут с собой на отдых, часто носят с собой, поэтому при выборе его габариты и вес далеко не на последнем месте.
По размеру фотоаппарата можно условно разделить на несколько категорий:
— сверхкомпактные аппараты весом до 200 г. Технические характеристики у таких фотоаппаратов не самые впечатляющие, зато они свободно помещаются в женской сумочке или в нагрудном кармане рубашки;
Технические характеристики у таких фотоаппаратов не самые впечатляющие, зато они свободно помещаются в женской сумочке или в нагрудном кармане рубашки;
— компактные фотоаппараты, самые распространенные, их вес — до 300 г. Они обладают более высокими техническими возможностями по сравнению со сверхкомпактными аппаратами и при этом вполне удобны для транспортировки;
— продвинутые, или полупрофессиональные, камеры весом в 400-600 г. Снабжены светосильной оптикой, возможностью устанавливать внешнюю вспышку, ручными настройками режимов съемки;
— профессиональные зеркальные фотоаппараты, вес которых от 600 г и выше. Оснащаются съемными объективами, корпус камеры обычно изготовлен из металла, обладают наибольшим спектром технических характеристик.
Где находится матрица в фотоаппарате. Взгляд изнутри: матрицы цифровых камер
Матрица является светочувствительной поверхностью, на которой через объектив попадает свет и преобразуется в электронные импульсы, а после обработки процессором, сохраняются на карте памяти как фотографии в виде цифрового кода.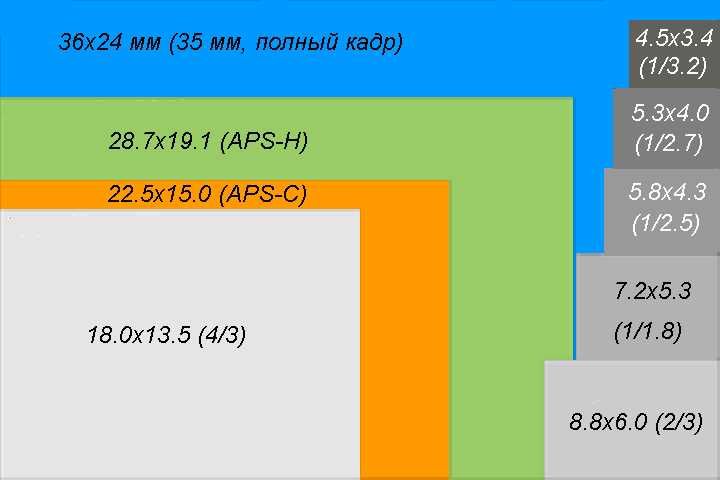
В компактных камерах это не имеет большого значения. Поэтому важно знать основные понятия светочувствительных матриц. Это позволит нам иметь вдумчивую и сознательную покупку недостатков и преимуществ, которые будут включены в модель камеры. Это облегчает выбор камеры, которая соответствует нашим потребностям, и гораздо проще работать с самой камерой, благодаря известному способу записи изображений. Поскольку количество мегапикселей и тип матрицы можно опустить, нельзя забывать о размере матрицы и соотношении ее размера с фотодиодами, которые она имеет.
Матрица фотоаппарата состоит из датчиков пикселей, от количества пикселей зависит разрешение цифрового изображения, чем больше пикселей, тем выше детализация кадра, тем чётче будут видны маленькие детали. Количество пикселей на DSLR камерах обозначается словом Megapixel. Современные фото датчики цифровых фотоаппаратов имеют 8-24 миллионов пикселей.
Чем у фотоаппарата большая матрица, тем меньше глубина резкости на снимке!
Размера матрицы фотоаппарата влияет и на размер пикселя, площадь пикселя у большой матрицы больше, и соответственно, светочувствительность и цветопередача лучше, а шумов меньше. От этого можно сделать вывод, что важно не только количество пикселей, но и крупность. В этом каждый может убедиться если сравнит картинку снятую мельницей c 12 megapixel и DSLR-ом у которого например 10 megapixel.
Каждый пиксель формирует одну точку на изображении и чем больше разрешение матрицы, тем выше детализация получаемого снимка. Количество пикселей на матрице называется разрешением и измеряется в megapixel. 1 megapixel = один миллион (1 000 000) пикселей.
Если в характеристиках DSLR камеры написано, что самый большой размер изображение 5616 на 3744, то получается, что разрешение матрицы фотоаппарата 22 мегапиксель (5616×3744=21026304).
Физический размер матрицы — одна из важнейших характеристик фотоаппарата, который непосредственно влияет на качество изображение.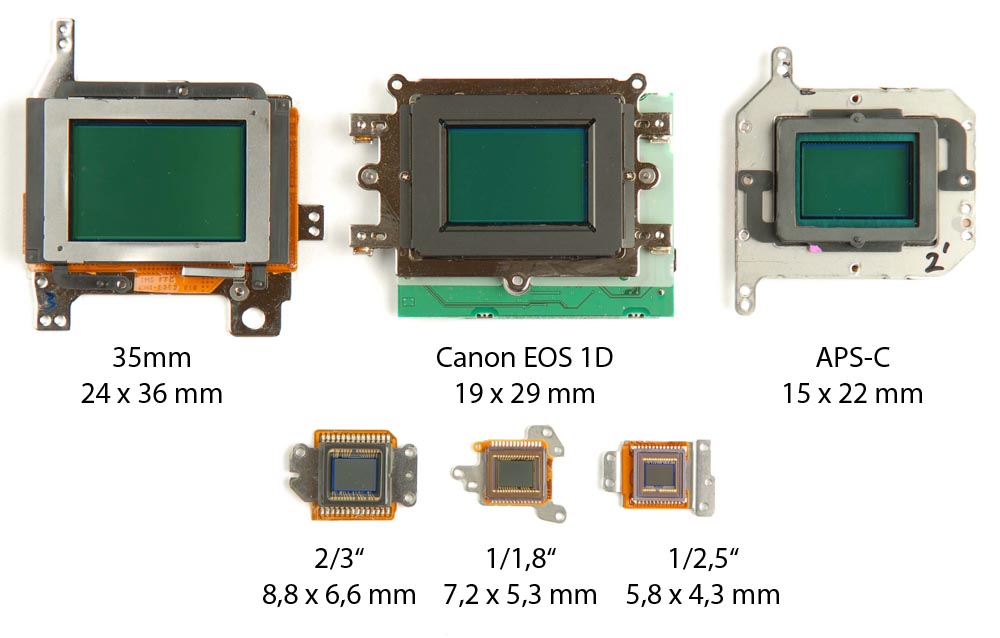 Из названия уже понятно, что речь о геометрических размерах а длина и ширина сенсора измеряется в миллиметрах, в характеристиках некоторых камер размер обозначается как диагональ матрицы в дюймах как 2/3″. Величина в дюймах указывается обратная величина, и поэтому при покупке камеры нужно выбрать ту, у которой число после дроби меньше.
Из названия уже понятно, что речь о геометрических размерах а длина и ширина сенсора измеряется в миллиметрах, в характеристиках некоторых камер размер обозначается как диагональ матрицы в дюймах как 2/3″. Величина в дюймах указывается обратная величина, и поэтому при покупке камеры нужно выбрать ту, у которой число после дроби меньше.
Если вы должны выбрать из 2 камер у которых одинаковое число 12 мегапикселей, но у первой матрица 1/2.5″, а у второй 1/1.8″ — лучше взять вторую — размер пикселя будет больше, соответственно, и качество снимков лучше.
Здесь вы можете увидеть таблицу, где приведены соотношение диагонали к геометрическому размеру.
Размер влияет на количество цифрового шума
, передаваемого вместе с основным сигналом на матрицу. Чем больше физический размер матрицы, тем больше ее площадь и тем больше света на нее попадает, в результате чего полезный сигнал матрицы будет сильнее и соотношение сигнал / шум будет лучше. Это позволяет получать качественную картинку с естественными цветами.
В последние годы для указывания размера сенсора используют ещё и коэффициент кроп-фактор (crop factor) , который показывает во сколько раз сенсор фотоаппарата меньше полного кадра (full frame) ,
Ниже на рисунке можете увидеть и сравнить размеры матриц разных цифровых фотоаппаратов.
Светочувствительность – это свойство светочувствительного материала, то есть пленки или матрицы. Светочувствительность указатель того, как быстро материал «впитывает» свет. По мировым стандартам светочувствительность обозначается ISO .
При съёмке пленочным фотоаппаратом для повышения светочувствительность, используют фотоплёнки с разными ISO , а в цифровом фотоаппарате повышения ISO делается с помощью кнопок или меню. Шкала в основном имеет такой — 100,200,400,800,1600,3200,6400,12800. Чем больше значение ISO, тем больше светочувствительность материала.
Чем выше ISO
, тем меньше требуется света для съёмки и способность камеры снимать в условиях с низкой освещенностью повышается. Показатель чувствительности матрицы указывает на то, насколько сильно усиливается сигнал, поступающий от нее. А это значит, что чем выше значение ISO
, тем сильнее будет усиливаться сигнал, но вместе с ним будут усиливаться и шумы. Из этого следует, что увлекаться большими значениями не стоит, потому что в этом случае повышается уровень шума, картинка получается очень зернистым, и даже бесполезным.
Показатель чувствительности матрицы указывает на то, насколько сильно усиливается сигнал, поступающий от нее. А это значит, что чем выше значение ISO
, тем сильнее будет усиливаться сигнал, но вместе с ним будут усиливаться и шумы. Из этого следует, что увлекаться большими значениями не стоит, потому что в этом случае повышается уровень шума, картинка получается очень зернистым, и даже бесполезным.
Высокие значения приходят на помощь в основном ночью или вечером, в тёмных помещениях, в клубах, даже в домашних условиях и при съемке быстродвижущихся объектов, когда нужно снимать с высокой выдержкой. Рекомендуемое значение ISO до 400 единиц.
Типы матриц фотоаппаратов
При выборе камеры, одним из важных факторов является тип матрицы фотоаппарата.
Сегодня мировые гиганты в своих DSLRах используют сенсоры двух типов. Первая – это ПЗС (CCD) , вторая — КМОП (CMOS) .
На сегодняшний технология CMOS
(Complementary Metal-Oxide Semiconductor)
завоевала более 90% мирового рынка, а технология CCD
(Charge-Coupled Device)
уже уходит во второй план.
Преимуществ CMOS -технологии, это низкое энергопотребление. CMOS сенсоры содержат в себе аналого-цифровые преобразователи и усилители, что делает низким стоимость конечного продукта.
Преимуществом CCD является низкий уровень шумов, высокая заполняемость пикселов (около 100%) и большой динамический диапазон.
Матрица фотокамеры служит для преобразования попадающего на нее с объектива светового потока в электрические сигналы, которые затем камера и преобразует в снимок. Делается это при помощи фотодатчиков, расположенных на матрице в большом количестве.
Что такое матрица фотоаппарата — это микросхема, состоящая из фотодатчиков, которые реагируют на свет.
Структура самой матрицы является дискретной, то есть состоящей из миллионов элементов (фотоэлементов), преобразующих свет.
Поэтому в характеристиках фотоаппарата как раз и указывается количество элементов матрицы, которое мы знаем как мегапиксели (Мп)
. 1 Мп = 1 миллиону элементов.
Именно от самой матрицы и зависит количество мегапикселей фотоаппарата, которое может принимать значение от 0.3 (для дешевых телефонных фотоаппаратов) до 10 и больше мегапикселей у современных фотоаппаратов. Например, 0,3 Мп это в переводе уже 300 тысяч фотоэлементов на поверхности матрицы.
- Физический размер
- Разрешение (мегапиксели)
- Светочувствительность
- Отношение сигнал-шум
Внешний вид матрицы
Сама матрица фотоаппарата формирует черно белое изображение, поэтому для получения цветного изображения, элементы матрицы могут покрывать светофильтрами (красный, зеленый, синий). И если сохранять фотографию в формате JPEG и TIFF, то цвета пикселей фотоаппарат вычисляет сам, а при использовании формата RAW пиксели будут окрашены в один из трех цветов, что позволит обработать такой снимок на компьютере без потери качества.
Физический размер
Еще одной характеристикой матрицы является размер. Обычно размер указывается как дробь в дюймах. Чем больше размер, тем меньше шума будет на фотографии и больше света регистрируется, а значит, больше оттенков получится.
Размер матрицы очень важный параметр всего фотоаппарата.
Разные размеры матрицы
Чувствительность и шумы
В фототехнике применительно к матрицам используется термин «эквивалентная» чувствительность. Происходит это потому, что настоящую чувствительность измеряют различными способами в зависимости от назначения матрицы, а применяя усиление сигнала и цифровую обработку, можно сильно изменить чувствительность в больших пределах.
Светочувствительность любого фотоматериала показывает способность этого материала преобразовывать электромагнитное воздействие света в электрический сигнал. То есть, сколько нужно света, что бы получить нормальный уровень электрического сигнала на выходе.
Размер и количество пикселей
Размер матрицы и ее разрядность в мегапикселях связаны между собой такой зависимостью: чем меньше размер, тем должно быть и меньше мегапикселей. Иначе из-за близкого размещения фотоэлементов возникает эффект дифракции и может получиться эффект замыливания на фотографиях, то есть пропадет четкость на снимке.
Еще размер матрицы и ее разрешение определяют размер пикселя и соответственно динамический диапазон, который показывает возможность фотокамеры отличить самые темные оттенки от самых светлых и передать их на снимке.
Так же чем больше размер пикселя, тем больше отношение сигнал-шум ведь больший по размерам пиксель может собрать больше света и увеличивается уровень сигнала. Поэтому при одинаковом размере матрицы меньшее количество мегапикселей может быть даже полезнее для качества фотографии.
Чем больше физический размер пикселя
(англ. pixel — picture element), тем больше он сможет собрать падающего на него света и тем больше будет соотношение сигнал-шум при заданной чувствительности. Можно и по-другому сказать: при заданном соотношении сигнал-шум будет выше чувствительность. Это означает, что можно увеличивать значение чувствительности при настройке экспозиции без боязни получить шумы на фотографии. Разумеется шумы появятся, только значение ISO, при котором это произойдет, будет разным для разных фотокамер. Поэтому зеркалки со своими большими матрицами по этим показателям сильно опережают компакты.
Размер пикселя зависит от физического размера матрицы и её разрешения. Размер пикселя влияет на фотографическую широту. Дополнительно о .
Матрица на плате
Разрешение
Разрешение матрицы зависит от количества используемых пикселей для формирования изображения. Объектив формирует поток света, а матрица разделяет его на пиксели. Но оптика объектива также имеет свое разрешение. И если разрешение объектива не достаточное, и он передает две светящиеся точки с разделением черной точкой как одну светящуюся, то точного разрешения фотоаппарата, которое зависит от значения Мп, можно и не заметить.
Поэтому результирующее разрешение фотокамеры зависит и от разрешения матрицы и от разрешения объектива, измеряемое в количестве линий на миллиметр.
И максимальным это разрешение будет, когда разрешение объектива соответствует разрешению матрицы. Разрешение цифровых матриц зависит от размера пикселя, который может быть от 0,002 мм до 0,008 мм (2-8 мкм). Сегодня количество мегапикселей на фотосенсоре может дистигать значения 30 Мп.
Структура матрицы
Отношение сторон матрицы
В современных фотоаппаратах применяются матрицы с форматами 4:3, 3:2, 16:9. В любительских цифровых фотоаппаратах обычно используется формат 4:3. В зеркальных цифровых фотоаппаратах обычно применяют матрицы формата 3:2, если специально не оговорено применение формата 4:3. Формат 16:9 редко используется.
Тип матрицы
Раньше в основном использовались фотосенсоры на основе ПЗС (прибор зарядовой связи, по-английски CCD — Charge-Coupled Device). Эти матрицы состоят из светочувствительных светодиодов и используют технологию приборов с зарядовой связью (ПЗС). Успешно применяется и в наше время.
Но в 1993 году была реализована технология Activ Pixel Sensors. Её развитие привело к внедрению в 2008 году КМОП-матрицы
(комплиментарный металл-оксид-полупроводник, по-английски CMOS
— Complementary-symmetry/Metal-Oxide Semiconductor). При этой технологии возможна выборка отдельных пикселей, как в обычной памяти, а каждый пиксель снабжен усилителем. Так же матрицы на этой технологии могут иметь и автоматическую систему настройки времени экспонирования для каждого пикселя. Это позволяет увеличить фотографическую широту.
Фирма Panasonic создала свою матрицу Live-MOS-матрицу . Она работает на МОП технологии. Применяя такую матрицу можно получить живое изображение без перегрева и увеличения шумов.
Как выбрать зеркальный фотоаппарат | Новости, гайды, обзоры, рецензии все о лучших компьютерных играх
Содержание
Выбирая зеркальную камеру начального уровня, не стоит обращать особого внимания на значение ISO и разрешение матрицы — это второстепенные параметры, первый из которых по важности затмевается важностью диафрагмы объектива, а второй служит маркетинговой приманкой для наивных покупателей.
Как выбрать зеркальный фотоаппарат?
Переход от «мыльницы» к «зеркалке» для любого начинающего фотографа, а тем более любителя, — процесс «болезненный». Иногда я использую непонятные термины «матрица», «кроп-фактор», «ISO», «светочувствительность» и т.д. Остальное вы узнаете по мере чтения, и, надеюсь, вся приведенная ниже информация прояснит ваши мысли, возможно, немного запутанная.
Но сначала немного терминологии. Цифровая зеркальная фотокамера — это устройство для фотосъемки. Зеркальные фотоаппараты отличаются от других аналогичных изделий своей технической сложностью и широким набором параметров, адаптированных для ручной настройки, которая осуществляется непосредственно в процессе съемки. Другими словами, такие камеры знакомы вам «мыльницами», но с возможностью смены объектива, более технологичным оборудованием и множеством функций, которые можно настраивать вручную (в любительских камерах настройка выполняется программными алгоритмами).
Давайте определимся, какие бывают типы зеркальных фотоаппаратов.
В нашей статье мы расскажем, что такое матрица цифровой камеры, виды матриц, их размеры, разрешение, светочувствительность и как правильно ухаживать за матрицей.
Содержание
- 1 Устройство пикселя матрицы 1.1 Пример подпикселя ПЗС-матрицы с карманом типа n
- 1.2 Микропиксельная линза
3.1 ПЗС-матрица
В статье рассказывается, как устроена матрица камеры, как она работает, какие характеристики матрицы наиболее важны при выборе фотооборудования
Дискретная структура матрицы
Они используют очень маленькие фотодиоды или фототранзисторы, которые улавливают свет и преобразуют его в электрический сигнал. Такой фотодиод формирует пиксель цифрового выходного изображения.
Небольшое отступление для непосвященных. Цифровое изображение состоит из множества точек, которые наш мозг «склеивает» в целостное изображение. Если таких пятен будет недостаточно, мы начнем замечать дискретность структуры, другими словами, будет казаться, что изображение «распадается», являясь мозаикой, плавные переходы исчезнут.
Давайте посмотрим на фото собаки.
Дискретная матричная структура на примере собаки
Теперь неважно, что он черно-белый. Отойдите от понятия цвета, это уже другая тема, на данный момент так будет лучше воспринимать информацию. Матрица улавливает электрический сигнал разной величины в зависимости от интенсивности света. И, если мы удалим специальные фильтры, предназначенные для получения цветного изображения, фотография на выходе будет только черно-белой. Кстати, есть и камеры, которые снимают исключительно в черно-белом цвете.
Он схематично нарисовал сетку на изображении, иллюстрирующую дискретную, то есть прерывистую структуру матрицы. Каждый квадрат иллюстрирует минимальный элемент матрицы — пиксель, образованный фотодиодом, который принимает свет N-й интенсивности и на своем выходе преобразуется в пиксель цифрового изображения N-й яркости. Например, верхний левый угол темный, что означает, что на эту область матрицы попало мало света. С другой стороны, шерсть светлая, что означает, что внутрь проникало больше света и электрический сигнал был другим. Конечно, изображение состоит из гораздо большего количества квадратов, здесь это лишь схематическое изображение.
Матрица CCD состоит из полупроводниковых фотодиодов, а считывание электрических потенциалов осуществляется по горизонтальным линиям.
Матрица фотоаппарата
Матрица камеры используется для преобразования светового потока, падающего на нее от объектива, в электрические сигналы, которые затем камера преобразует в изображение. Делается это с помощью фотодатчиков, расположенных на матрице в большом количестве.
Что такое матрица камеры — это микросхема, состоящая из фотодатчиков, реагирующих на свет.
Сама матрица имеет дискретную структуру, то есть состоит из миллионов элементов (фотоэлементов), преобразующих свет.
Поэтому в характеристиках камеры указано количество элементов матрицы, которые мы знаем как мегапиксели (Мп). 1 мегапиксель = 1 миллион элементов.
Количество мегапикселей камеры зависит от самой матрицы, которая может принимать значение от 0,3 (для дешевых телефонных камер) до 10 и более мегапикселей для современных камер. Например, 0,3 мегапикселя уже переведены на 300 тысяч фотоэлементов на поверхности матрицы.
В качестве характеристик матрицы можно рассматривать следующие параметры:
- Физическое измерение
- Разрешение (мегапиксель)
- Светочувствительность
- Отношение сигнал шум
Внешний вид матрицы
Сама матрица камеры формирует черно-белое изображение, поэтому для получения цветного изображения элементы матрицы можно прикрыть светофильтрами (красный, зеленый, синий).
А если вы сохраните фотографию в формате JPEG и TIFF, камера сама вычислит цвета пикселей, а при использовании формата RAW пиксели будут окрашены в один из трех цветов, что позволит вам обработать это изображение на компьютере без потери качества.
Физический размер
Еще одна особенность матрицы — размер. Размер обычно указывается в виде дроби в дюймах. Чем больше размер, тем меньше шума будет на фотографии и будет записано больше света, а значит, будет получено больше оттенков.
Размер матрицы — очень важный параметр всей камеры.
Различные размеры матриц
В фотографической технике для обозначения матриц используется термин «эквивалентная» чувствительность. Это связано с тем, что фактическая чувствительность измеряется по-разному, в зависимости от назначения матрицы, а с помощью усиления сигнала и цифровой обработки чувствительность можно значительно изменять в широком диапазоне.
Светочувствительность любого фотографического материала показывает способность этого материала преобразовывать электромагнитный эффект света в электрический сигнал. То есть сколько света необходимо для получения нормального уровня электрического выходного сигнала.
Чувствительность сенсора (ISO) влияет на съемку в темных местах. Чем выше чувствительность, которую можно установить в настройках, тем лучше качество изображения в темноте при желаемой диафрагме и выдержке.
Значение ISO может варьироваться от нескольких десятков до нескольких десятков тысяч. Недостатком высокой светочувствительности может быть появление на фотографии шума в виде зернистости.
Чувствительность также участвует в настройке экспозиции.
Размер и количество пикселей
Размер матрицы и ее разрядность в мегапикселях связаны между собой следующим соотношением: чем меньше размер, тем меньше должно быть мегапикселей. В противном случае из-за близкого расположения фотоэлементов возникает эффект дифракции и на фотографиях может появиться эффект размытия, т.е резкость изображения исчезнет.
Размер матрицы и ее разрешение также определяют размер пикселей и, следовательно, динамический диапазон, который показывает способность камеры отличать более темные тона от более светлых и передавать их в изображение.
Кроме того, чем больше размер пикселя, тем выше отношение сигнал / шум, потому что более крупный пиксель может собирать больше света и уровень сигнала увеличивается. Следовательно, при том же размере сенсора меньшее количество мегапикселей может быть еще более выгодным для качества фотографий.
Чем больше физический размер пикселя (англ. Pixel — элемент изображения), тем больше он сможет улавливать падающий свет и тем выше отношение сигнал / шум при заданной чувствительности. Можно сказать и по другому: при заданном соотношении сигнал / шум чувствительность будет выше.
Это означает, что вы можете увеличивать значение чувствительности, регулируя экспозицию, не опасаясь шума на фотографии. Очевидно, что некоторый шум появится, только значение ISO, при котором это происходит, будет отличаться для разных камер.
Поэтому зеркалки с их большими матрицами намного опережают по этим показателям компактные.
Размер пикселя зависит от физического размера матрицы и ее разрешения. Размер пикселя влияет на фотографическую широту. Подробнее о количестве мегапикселей.
Матрица на борту
Разрешение
Разрешение матрицы зависит от количества пикселей, используемых для формирования изображения. Линза формирует световой поток, а матрица делит его на пиксели. Но и у линзовой оптики есть своя разрешающая способность.
И если разрешения объектива недостаточно и он пропускает две яркие точки, разделенные черной точкой, как яркую, то точное разрешение камеры, зависящее от значения Mp, может быть не замечено.
Следовательно, результирующее разрешение камеры зависит как от разрешения матрицы, так и от разрешения объектива, измеряемого количеством строк на миллиметр.
И это разрешение будет максимальным, когда разрешение объектива будет соответствовать разрешению матрицы. Разрешение цифровых матриц зависит от размера пикселя, который может варьироваться от 0,002 мм до 0,008 мм (2-8 мкм). Сегодня количество мегапикселей на фотосенсоре может достигать 30 мегапикселей.
Структура матрицы
Отношение сторон матрицы
Современные камеры используют матрицы с форматами 4: 3, 3: 2, 16: 9. В домашних цифровых камерах обычно используется соотношение сторон 4: 3. Массивы с соотношением сторон 3: 2 обычно используются в цифровых зеркальных фотокамерах, если специально не указано использование соотношения сторон 4: 3. Формат 16: 9 используется редко.
Тип матрицы
Ранее использовались в основном фотодатчики на основе CCD (Charge-Coupled Device, на английском языке CCD — Charge-Coupled Device). Эти матрицы состоят из светочувствительных светодиодов и используют технологию устройств с зарядовой связью (CCD). Его успешно применяют и в наше время.
Но в 1993 году была внедрена технология Activ Pixel Sensors. Его разработка привела к появлению в 2008 году матрицы CMOS (дополнительная симметрия / металл-оксидный полупроводник).
С помощью этой технологии отдельные пиксели могут быть дискретизированы, как в обычной памяти, и каждый пиксель снабжен усилителем. Кроме того, матрицы на основе этой технологии могут иметь автоматическую систему установки времени экспозиции для каждого пикселя.
Это позволяет увеличить фотографическую широту.
Компания Panasonic создала собственную матрицу Live-MOS. Работа по технологии MOS. Используя такую матрицу, можно получить живое изображение без перегрева и увеличения шума.
Какая матрица лучше всего подходит для камеры? Типы матриц. Количественный показатель качества, светочувствительности и шума, физической геометрии сенсора.
На что влияет размер матрицы
Производители камер смартфонов (самые известные — Sony, LG, Samsung, Philips, OmniVision) вынуждены искать компромиссы между размером и качеством матрицы. Дело в том, что по мере уменьшения размера пикселя он начинает улавливать меньше света и становится менее чувствительным. А если оставить те же размеры пикселей, увеличивая их количество, то сам модуль камеры увеличится. В зеркалках это не страшно, но в смартфонах толщиной 5-10 мм важен каждый микрометр.
В итоге в смартфонах при увеличении мегапикселей за счет миниатюризации транзисторов каждый из них улавливает меньше света. Детализация изображения увеличивается, но резкость изображения не меняется. В таких условиях 8-мегапиксельная камера не уступит 16-мегапиксельной камере с таким же размером сенсора, а в некоторых местах будет обходить ее.
Таблица характеристик матриц цифровых фотоаппаратов
По сравнению с фотокамерами прошлых лет, у цифровых камер очень мало механических узлов. Их заменили электронные компоненты. Остался неизменным только принцип получения фотографии, который заключается в переносе видимого изображения на какой-либо физический носитель. У старых фотокамер это была светочувствительная плёнка, а у современных цифровых устройств – матрица фотоаппарата. Статья может быть полезна тем, кто интересуется фотографией не только, как искусством, но и хочет понять некоторые конструктивные особенности фотокамер и принципы получения изображения.
От редакции сайта Vt-tech.eu
Автор данной статьи — Владимир Медведев. Статья была опубликована на личном сайте автора по адресу: vladimirmedvedev.com/dpi.html Однако, автор решил полностью переделать сайт и статья пропала. Статья очень хорошо и доступно раскрывает тему дифракции при высоких значениях диафрагмы, поэтому редакция сайта Vt-Tech никак не могла пройти мимо. Мы извлекли статью из архивов кэширующих сайтов и выложили здесь.
При экспорте статьи немного пострадали картинки: не все изображения из первоначальной статьи доступны.
Надеемся, что автор статьи не будет возражать против размещения её здесь.
Светочувствительность
Параметры чувствительности (ISO) демонстрируют возможность камеры снимать в условиях плохой освещенности. Фотоаппарат с высокой чувствительностью будет делать более четкие изображения. Важность это показателя заключается в том, что при помощи ISO, не меняя параметры диафрагмы и выдержки, можно отрегулировать яркость кадра. Принцип работы состоит в усилении электрического тока, а не в усилении светочувствительности фотоэлементов. Однако при сильном увеличении, появляются шумы.
Увеличивать значение ISO рекомендуется только в случаях, когда слабо освещен задний план, нет возможности воспользоваться вспышкой либо съемка идет с руки.
Рекомендуемые параметры ISO:
- 100-200 единиц для съемки на улице и при хорошем освещении;
- 400-800, для помещений с искусственным освещением;
- 800-1600, для создания фотографий ночью.
Более высокие показатели рекомендованы для съемок концертов.
Кто здесь
Эту таблицу я сделал уже много лет назад, для наглядного сравнения цифровых фотоаппаратов. В те годы было много путаницы даже с понятием «кропа» и «полного формата», не говоря уже про компактные и среднеформатные аппараты. Скудная информация была разбросана по многочисленным сайтам производителей фототехники, и сравнить камеры наглядно было практически невозможно. Всё это вводило в заблуждение многих фотолюбителей, разжигая яростные споры на профильных форумах.
Чтобы как-то упорядочить ситуацию и привести к одному знаменателю любые камеры — от мыльниц до среднеформатных камер, я решил использовать понятие плотности пикселей — DPI (хотя, возможно, будет правильней сказать ppi). Почему я выбрал именно этот параметр, который раньше нигде не использовался для этого? Просто потому, что имевшаяся в открытом доступе информация, позволяла рассчитывать его идеально точно, без погрешностей. Зная длину и ширину матрицы, а также количество пикселей, я мог без труда, абсолютно точно рассчитать их плотность. В качестве бонуса, понятие плотности пикселей, позволило сравнить матрицу любого размера с разрешением сканов с плёнки (DPI цифрового фотоаппарата и установленное DPI во время сканирования — по сути, одно и то же).
Удобная в использовании, наглядная таблица, позволила двигаться дальше, по пути познания технических характеристик матриц, и, со временем, обросла массой дополнительных «полезностей». Сегодня в таблице собраны самые разные параметры, имеющие отношение к матрицам цифровых фотоаппаратов. Это и размер пикселя, и точный кроп-фактор, и площадь матрицы, и дифракционное ограничение диафрагмы. С помощью этой таблицы можно легко отслеживать тренды развития фототехники, прогнозировать грядущие изменения или просто выбирать камеру.
Разобраться в многочисленных параметрах таблицы сходу не так просто. Помочь фотографу в этом должны специальные статьи, сопровождающие таблицу, раскрывающие её особый смысл.
Приятного чтения!
Какой фотоаппарат выбрать
При желании снимать всё подряд, не задумываясь о высоком качестве снимка, можно приобрести любой фотоаппарат типа компакт или «мыльница». Отсутствие ручных режимов, большое количество сюжетных программ и фокусировка на лица, делает такой фотоаппарат простым в обращении и удобным для бытового использования. Для получения качественных снимков подойдёт недорогой фотоаппарат с матрицей большего размера и с возможностью ручной установки некоторых параметров съёмки. Ещё больше возможностей предоставляет пользователю беззеркальная камера «суперзум». Обладая небольшими размерами, она позволяет снимать интересные сюжеты на большом удалении от объекта съёмки, поэтому подойдёт для туристов и путешественников. Самые качественные снимки получаются с помощью зеркальной камеры, хотя её применение ограничивается большими размерами и весом. Если Вы хотите узнать все нюансы выбора фотокамеры, наши эксперты подготовили подробные инструкции в статье как выбрать фотоаппарат.
Часть первая. Увеличивает ли кроп-фактор способность объективов «приближать»?
Поскольку я занимаюсь фотографией дикой природы, часто бывает просто невозможно подойти ближе к объекту съёмки (из-за риска испугать животное или птицу). И тут во всесь рост встаёт проблема нехватки фокусного расстояния объективов (говоря простым языком — способности оптики «приближать удалённые объекты»). На заре цифровой фотографии, было крайне распространено мнение, что камеры с «кропнутой» матрицей увеличивают фокусное расстояние объективов в кроп раз. Тут я постараюсь объяснить, почему неправильно так думать.
Сейчас у меня есть две камеры. Одна полноформатная — Canon EOS 5D Mark II, вторая с кроп-фактором 1,6х — Canon EOS 20D. Кроп-фактор 1,6, означает, что диагональ матрицы 20D в 1,6 раза меньше, чем диагональ матрицы 5D MarK II. 43mm разделить на 27mm равно 1,6.
С кроп-фактором разобрались. Матрица уменьшилась. Но оптика то осталась прежней. Объектив, например, 300мм подходит как к 20D, так и к 5D Mark II. Что будет, если один и тот же кадр снять на 5D Mk II и на 20D? Самая наглядная и точная метафора — взять большой напечатанный кадр, и вырезать из него середину ножницами. Какая разница, резать матрицу или уже готовый кадр? Вот так:
Конечно, на вырезанном кадре птица выглядит крупнее. Часто, начинающими фотографами, это свойство кропа ошибочно воспринимается как плюс. Но на самом деле, плюсом вовсе не является. Зачем спешить, и «вырезать кадр» до съёмки? А если птица подлетит ближе, или нам захочется вырезать не середину, а край снимка? На полноформатной матрице мы можем резать как угодно, а можем вообще не резать. А вот кроп вариантов уже не оставляет. Вылезшие за край кадра крылья уже не вернуть, и потенциально хороший снимок отправляется в корзину.
примеры основных кроп-факторов: 1.3х, 1.6х и 2х
Спорить, что лучше, кроп или полный формат я тут не стану. Кроп может быть дешевле или быстрее. Тут у каждого своё решение. Вместо ненужных споров, предлагаю ответить на вопрос, какая характеристика камеры может по-настоящему способствовать качественному приближению? И ответ прост — плотность пикселей (столбик dpi в таблице). Для того, чтобы понять, почему это так, давайте рассмотрим ещё один пример из жизни. В этот раз, для удобства, возьмём две полноформатные камеры — 5D и 5D Mark II. Особо подчеркну, что для конечного результата совершенно не важно, полный формат у нас или кроп, тут играет роль только один параметр — плотность пикселей. У 5D это 3101 dpi, у 5D Mark II — 3955 dpi.
Представьте сафари: яркий солнечный день, низкая чувствительность ISO, отличная оптика. И вдруг мы видим дикого леопарда в 100 метрах от нас. Делаем снимок, и зверь скрывается. 100 метров — это далеко. Для того, чтобы кадр хорошо смотрелся, нам волей-неволей придётся сильно кадрировать, оставив 1/10 от полного кадра (для простоты подсчёта). Математика подсказывает, что кадр с камеры 5D (12мп) после кадрирования будет состоять из 1,2мп (12 разделить на 10), что очень мало и не годится для качественной печати. А вот снимок с 5D MII (21мп) будет состоять из 2,1 мп, что уже значительно лучше! И я ещё раз хочу подчеркнуть — совершенно не важно, кроп у нас, или полный формат. 20D, у которой плотность 3955dpi (как и у 5D Mark II), аналогичный кадр, в тех-же самых условиях, тоже состоял бы из 2,1 мп. Несмотря на то, что матрица там всего 8 мегапикселей. Тут играет роль только плотность пикселей.
Леопарда снять одновременно с двух камер не представляется возможным, поэтому я попробовал тест попроще, чтобы наглядно показать разницу от плотности пикселей. Два тестовых кадра, были сняты со штатива, с одинакового расстояния, с одинаковой оптики, с одинаковым фокусным расстоянием:
полный кадр выглядел так при очень сильном приближении становится видна разница
Это не сравнение 450D против 1D Mark III. Это сравнение 3514 dpi против 4888 dpi. В этих условиях, аналогичный результат будет на любой другой паре камер с подобной плотностью пикселей. Просто когда я писал статью, у меня были именно эти две камеры, вот и всё. Ps:
- Тесты проводились в хороших условиях, и рассматривались под большим увеличением. В реальной жизни, скорее всего, разница будет заметна ещё меньше. Стоит оно того или нет, решать только вам.
- Разумеется, качество 21 мегапикселя 5D Mark II, в сравнении с 12 мегапикселями 5D, будет заметно не только при сильном кадрировании. Надеюсь, это и так всем понятно.
Количество мегапикселей и разрешение матрицы
Любой продавец, пытаясь продать фотоаппарат, обязательно отметит количество пикселей в камере. Что это и насколько важен этот показатель? На самом деле, их количество важно в том случае, если в дальнейшем снимок будет печататься или просмотр изображения будет производиться с увеличением на мониторе компьютера.
Фотоаппарат с большим количество пикселей должен иметь большую матрицу, в противном случае избежать дифракции не удастся, снимки будут замыленными, нечеткими. А чтобы распечатать фотографию формата 10Х15, потребуется всего лишь 3 мегапикселя, а самый навороченный телевизор вещает с разрешением 2 мегапикселя. Сразу становится понятно, что количество pel в фотоаппарате – это всего лишь маркетинговый ход, рассчитанный на привлечение клиентов.
ВАЖНО! Цифровая камера с большим количеством пикселей должна иметь большой физический размер матрицы. Несоответствие этих параметров приведет к тому, что снимки будут «шумными» и обрезанными по широте.
Второй важный критерий – разрешение. Что такое разрешение матрицы фотоаппарата? Эта величина определяет количество точек на единицу изображения. Большее разрешение обеспечивает более точное изображение. Разрешение складывается из размера пикселя, который на сегодняшний день варьируется от 2 до 8 мкм.
Часть вторая. Меньше пиксель — больше шум
Из первой части можно сделать вывод — давайте наращивать плотность пикселей, что бы картинка была лучше. Но не всё так просто. Чем больше плотность пикселей, тем меньше площадь каждого конкретного пикселя (такой столбик тоже есть в таблице). Чем меньше площадь пикселя, тем меньше фотонов света он улавливает. Фотоны — это полезный сигнал. Чем их меньше, тем хуже соотношение сигнал/шум, тем хуже чувствительность камеры.
Скажу просто — камеры, которые мне приходилось тестировать, с размером пикселя менее 6 микрон, имеют плохую чувствительность и более высокий шум. Это моё мнение, мой опыт. Пока что никаких исключений в этом правиле я не видел. Возможно, когда-нибудь, технологии позволят делать новые камеры более чувствительными, но пока так. Возникает вопрос, что выбрать? Плотность пикселей или чувствительность? Тут всем придётся искать свой собственный ответ. Кому интересно моё мнение, смотрите следующие два абзаца, но… никому его не навязываю.
Я проанализировал свои снимки, за последние несколько лет, размышляя, может ли большая плотность пикселей увеличить качество моих снимков. Результат оказался очень неожиданным: снимков, качество которых можно улучшить за счёт плотности пикселей, оказалось крайне мало. Помимо моих кривых рук, виной тому стали многие естественные факторы — шумы, шевелёнка, качество оптики, «воздух», не точный АФ и пр. Причём, 90% снимков, которые можно было бы улучшить повышенной плотностью пикселей, в улучшении и не нуждались — все они и так обладали достаточным качеством.
Показательно, что большая часть некачественных фотографий страдала из-за недостатка чувствительности. Шевелёнка и шумы мне, как фотографу дикой природы, сейчас мешают гораздо сильнее. 16-25 мегапикселей на полном формате — мой идеал на сегодняшний день.
Также не стоит забывать про ДД — динамический диапазон, который очень тесно связан с шумами, т.к. они ограничивают его в тенях. Меньше пиксель — меньше и ДД. Выводы тут каждый сам для себя сделает. А тех, кому важнее окажется плотность пикселей, я хочу предупредить об ещё одном коварном враге, который будет вечно подстерегать Вас, и от которого Вам не скрыться. По крайней мере в этой Вселенной. Это дифракция…
Типы матриц
Матрицы фотоаппаратов могут быть изготовлены по разным технологиям и иметь разные размеры. В фотокамерах применяются следующие виды сенсоров:
- ПЗС;
- КМОП;
- Live-MOS;
- 3 CCD.
ПЗС матрица состоит из полупроводниковых фотодиодов, а считывание электрических потенциалов осуществляется по горизонтальным строкам. Полевые структуры КМОП намного экономичнее, но за счёт электронных преобразований при считывании, качество картинки несколько хуже, чем на матрице ПЗС. Live-MOS является усовершенствованным КМОП сенсором. Его отличают повышенная чувствительность и быстрая передача сигналов. В матрице используется малошумящий усилитель и низковольтное питание. Это разработка Панасоник, которая применяется в фотоаппаратах этой компании, а так же в камерах Leica и Olympus. 3CCD или трёхматричный сенсор обеспечивает высококачественную цветопередачу с малым уровнем шумов. Разделение цветов осуществляется дихроидной призмой маленького размера с записью каждого из основных цветов на отдельную матрицу. К недостаткам системы 3CCD относятся большие размеры устройства и высокая цена камеры.
Часть третья. Дифракция в фотографии. Теория
Для этой части моей статьи все рисунки взяты из замечательного учебного пособия про дифракцию: Tutorials: difraction & photography. Очень рекомендую его всем, кто хочет глубоко разобраться в этой теме.
В этой части матрица ни причём, а отдуваться всё равно приходится. За физику. Какое отношение имеет дифракция к матрице цифрового фотоаппарата? Никакого. Но давайте рассмотрим, что же мы имеем ввиду под словом дифракция, когда говорим о головной боли фотографов?
Если не вдаваться в подробности, то дифракция — это физическое явление, которое мешает нам сильно закрывать диафрагму, снижая качество получаемого изображения.
Если рассмотреть причины дифракции, то мы увидим, что появляется она при прохождении света через диафрагму. После прохождения диафрагмы, лучи идут уже не столь прямо, как нам хотелось бы, а немного «расслаиваются», расходятся в стороны. В результате каждый лучик образует на поверхности матрицы не просто точку, а «кружок и круги по воде» — дифракционные кольца, или, как это ещё называют диск Эри (по фамилии учёного, английского астронома — George Biddell Airy):
Разумеется, что, в отличие от хорошо сфокусированной точки, подобные диски могут залезть на соседние пиксели, если те расположены достаточно плотно. А когда они лезут на соседние пиксели, мы прощаемся с хорошей резкостью.
Давайте рассмотрим это явление на примере. Зная размер пикселей, мы без труда построим сетку, обозначающую границы пикселей (пунктиром). Далее по формуле мы вычисляем диаметр диска Эри и для упрощения представляем его в виде пятна света. И попробуем наложить диски Эри, характерные для самых распространённых диафрагм, на нашу сетку. Для примера я взял размер пикселя камеры 5D MarkII, а значения диафрагм указаны под каждым рисунком:
Как вы видите, при неизменной сетке пикселей кружок Эри растёт. При f/16 он уже значительно залезает на соседние пиксели, что в реальной жизни будет размывать картинку, не давая нам попиксельной резкости. А при f/22 этот диск занимает почти всю площадь 9 пикселей! Зная размеры этого кружка, я могу рассчитать максимально закрытую диафрагму, после которой дальнейшее закрытие, будет ухудшать фотографию. Этот параметр мой коллега с the-digital-picture.com называет DLA (diffraction limited aperture), что соответствует русскому термину ДОД (дифракционное ограничение диафрагмы). Однако мои расчёты числового значения этого параметра несколько отличаются от вычислений автора вышеуказанного сайта. Например, в своей формуле он, видимо, каким-то образом учитывает и размер всей матрицы (в частности, при равной плотности пикселей, значения DLA 40D (f/9.3) и 1D MarkIV (f/9.1) различаются). Это, конечно же, не может быть верным, когда мы говорим о дифракции на уровне пикселей. Впрочем, наши результаты не сильно расходятся, так что разницей можно принебречь. К тому же, в силу сочетания очень многих факторов (нечеткость границ диска, сложная структура ячеек матрицы и пр.), невозможно с абсолютной точностью назвать величину DLA, после которой начинает наблюдаться деградация изображения. Итак, давайте посмотрим, как это работает. Для 5D MarkII (как и для 20D), DLA составляет f/10,8, что очень близко к рисунку выше с подписью f/11. В то же время, для Canon 1D (всего 4 mp, — самые крупные ячейки матрицы среди всех камер Canon), этот параметр составляет f/19,1. Давайте закроем диафрагму до f/16, и посмотрим, как будет выглядеть диск Эри, спроецированный на сетку пикселей 1D и на сетку 5D MarkII (или 1Ds MarkIII или 20D):
Как видно из этого примера, что позволено Юпитеру, не позволено быку. При съёмке на 1D мы легко можем закрыть диафрагму до f/16, а на 5D Mark II это приведёт к снижению возможной детализации.
Итоги
При выборе фотоаппарата следует сначала ориентироваться на размер матрицы. Не стоит гнаться за большим количеством точек на изображении. 12-16 Мп более чем достаточно для получения и печати фотографий хорошего качества. Цифровой зум для камеры не слишком важен, так как он только позволяет растянуть центральную часть изображения на весь экран с ухудшением качества. Многие параметры не указываются в спецификации на фотоаппарат, поэтому перед выбором модели неплохо почитать отзывы фотолюбителей на специальных сайтах.
Часть четвёртая. Дифракция в фотографии. Практика
Выше была лишь сухая теория. Она абсолютно верна, но не учитывает того, что оптика очень часто не способна выдать достаточной детализации, на диафрагмах уже DLA. Так как же дело обстоит на практике? Действительно, оптика не всегда даёт качество, которое позволило бы нам видеть попиксельную резкость. Более того, как мы знаем, качество изображения растёт по мере закрытия диафрагмы. Из-за этого у качественной оптики мы можем заметить ухудшение качества из-за дифракции на диафрагмах близких к DLA, а вот у плохих это может произойти на значительно позже. Однако, если ухудшение наступает на одно или даже два значения диафрагмы уже DLA, это означает, что матрица камеры с этим объективом никогда не получает достаточно детаелй. Т.е. попиксельной резкости там не будет никогда, иначе дифракцию мы бы смогли заметить на уровне числового значения DLA.
Что же мы можем наблюдать на камерах с большой плотностью пикселей? Для примера возьмём новую (на момент написания этих строк) камеру Canon EOS 7D. DLA там составляет f/7,2. Что это значит? Это значит, что 7D сможет выдать попиксельную детализацию только на диафрагмах менее 7,2. Возьмём хорошую оптику и посмотрим на результат. Для этого обратимся за помощью к ресурсу The Digital Picture. Там мы можем найти снимок специальной тестовой таблицы на камеру 7D с использованием хорошей оптики (Canon EF 200mm f/2. 0L IS USM). Сравним кадр, сделанный при диафрагме 5,6 и 8. Как мы видим, резкость незначительно ухудшается — теория работает! Теперь сравним 5,6 и 11 — вот тут уже идёт заметное падение резкости, причём не только по центру, но даже в углах! Весь парадокс камер с высокой плотностью пикселей, что оптике и так сложно передать значительное количество деталей, а передать значительное количество деталей на диафрагмах шире, чем f/8… боюсь это задача лишь для действительно великолепных объективов. Таких, как Canon EF 200mm f/2.0L IS USM ~ за 6000$… В заключение, для невнимательных читателей, я хочу ещё раз подчеркнуть, что дифракция не является параметром матрицы, искажает изображение до матрицы и не зависит от марки камеры (а если и зависит, разница минимальна и я её не учитываю).
Благодарю Дмитрия (Доктор Ктулху) за помощь, оказанную в процессе редактирования текста статьи.
Что такое фотоматрицы?
Прежде чем мы подробно остановимся на типах фотоматриц, следует подчеркнуть, что вообще представляют собой матрицы в зеркальных фотокамерах или цифровых камерах.
Матрица фотоаппарата – это электронные светочувствительные датчики. Они используются для преобразования изображения в сигнал, позволяющий сохранить изображение в памяти устройства. Тщательный анализ характеристик сенсора позволит нам выбрать оборудование высочайшего качества. Чтобы купить оборудование высокого класса с хорошим сенсором, сравните две камеры с учетом, например, производителя. Таких комбинаций стоит составить несколько, ведь ассортимент продукции чрезвычайно богат и разнообразен.
Таблица характеристик матриц цифровых фотоаппаратов
| Модель | Произв | Тип | Mp* | Кроп-фактор | Размер пикселя (микрон) | Площадь (мм2 ) | Размер матрицы (мм) | Размер матрицы (пикселей) | DPI | DLA** | FF*** (mp) |
| C a n o n | |||||||||||
| 1D | Kodak | CCD | 4,1 | 1.3 х | 11,6 µm | 548,2 | 28,7 x 19,1 | 2464 x 1648 | 2181 | f/19,1 | 6,4 |
| D30 | Canon | CMOS | 3,1 | 1. 6 х | 10,5 µm | 342,8 | 22,7 x 15,1 | 2160 x 1440 | 2417 | f/17,6 | 7,8 |
| 1Ds | Canon | CMOS | 11,0 | 1.0 х | 8,8 µm | 852 | 35,8 x 23,8 | 4064 x 2704 | 2883 | f/14,8 | 11,1 |
| 1D Mark II | Canon | CMOS | 8,2 | 1.3 х | 8,2 µm | 548,2 | 28,7 x 19,1 | 3504 x 2336 | 3101 | f/13,8 | 12,9 |
| 5D | Canon | CMOS | 12,7 | 1.0 х | 8,2 µm | 852 | 35,8 x 23,9 | 4368 x 2912 | 3101 | f/13,8 | 12,9 |
| 300D/D60/10D | Canon | CMOS | 6,3 | 1.6 х | 7,4 µm | 342,8 | 22,7 x 15,1 | 3072 x 2048 | 3400 | f/12,4 | 15,5 |
| 1Ds Mark II | Canon | CMOS | 16,6 | 1.0 х | 7,2 µm | 864 | ~ 36 x 24 | 4992 x 3328 | 3514 | f/12,1 | 16,5 |
| 1D Mark III | Canon | CMOS | 10,1 | 1. 3 х | 7,2 µm | 525,5 | 28,1 x 18,7 | 3888 x 2592 | 3514 | f/12,1 | 16,5 |
| 1D x | Canon | CMOS | 17,9 | 1.0 х | 6,9 µm | 864 | 36 x 24 | 5184 x 3456 | 3657 | f/11,7 | 17,9 |
| 350D/20D/30D | Canon | CMOS | 8,2 | 1.6 х | 6,4 µm | 337,5 | 22,5 x 15,0 | 3504 x 2336 | 3955 | f/10,8 | 20,9 |
| 5D II / 1Ds III | Canon | CMOS | 21,0 | 1.0 х | 6,4 µm | 864 | ~ 36 x 24 | 5616 x 3744 | 3955 | f/10,8 | 20,9 |
| 5D III | Canon | CMOS | 22,1 | 1.0 х | 6,25 µm | 864 | 36 x 24 | 5760 x 3840 | 4064 | f/10,6 | 22,1 |
| 1000D/400D/40D | Canon | CMOS | 10,1 | 1.6 х | 5,7 µm | 328,6 | 22,2 x 14,8 | 3888 x 2592 | 4455 | f/9,6 | 26,6 |
| Canon EOS 1D Mark IV | Canon | CMOS | 16,1 | 1. 3 х | 5,7 µm | 518,9 | 27,9 x 18,6 | 4896 x 3264 | 4455 | f/9,6 | 26,6 |
| Canon EOS 450D | Canon | CMOS | 12,2 | 1.6 х | 5,2 µm | 328,6 | 22,2 x 14,8 | 4272 x 2848 | 4888 | f/8,7 | 32,0 |
| 500D, 50D | Canon | CMOS | 15,1 | 1.6 х | 4,7 µm | 332,3 | 22,3 x 14,9 | 4752 x 3168 | 5413 | f/7,9 | 39,2 |
| 7D / 60D / 600D | Canon | CMOS | 17,9 | 1.6 х | 4,3 µm | 332,3 | 22,3 x 14,9 | 5184 x 3456 | 5905 | f/7,2 | 46,7 |
| 7D Mark II | Canon | CMOS | 19.96 | 1.6 х | 4,1 µm | 336 | ~ 22,4 x 15,0 (?) | 5472 x 3648 | ~ 6177 | f/6.9 | 50,3 |
| 5Ds (r) | Canon | CMOS | 50,3 | 1.0 х | 4,1 µm | 864 | 36 x 24 | 8688 x 5792 | 6130 | f/6. 9 | 50,3 |
| N i k o n | |||||||||||
| D1/D1H | Sony | CCD | 2,6 | 1.5 х | 11,9 µm | 367,4 | 23,7 x 15,5 | 2000 x 1312 | 2143 | f/20 | 6,2 |
| D2H | Nikon | JFET | 4,0 | 1.5 х | 9,6 µm | 367,4 | 23,7 x 15,5 | 2464 x 1632 | 2641 | f/16,1 | 9,3 |
| D1X**** | Sony | CCD | 5,3 | 1.5 х | 5,9/11,9 | 369,7 | 23,7 x 15,6 | 4028 x 1324 | — | — | — |
| D700/D3/D3s | ? | CMOS | 12.1 | 1.0 х | 8,4 µm | 860,4 | 36,0 x 23,9 | 4256 x 2832 | 3003 | f/14,1 | 12,2 |
| D4 | ? | CMOS | 16,2 | 1.0 х | 7,3 µm | 860,4 | 36,0 x 23,9 | 4928 x 3280 | 3476 | f/12,4 | 16,2 |
| D40/D50/D70/D100 | Sony | CCD | 6,0 | 1. 5 х | 7,8 µm | 367,4 | 23,7 x 15,5 | 3008 x 2000 | 3237 | f/13,1 | 14,0 |
| D3000/D40x/D60/D80/D200 | Sony | CCD | 10,0 | 1.5 х | 6,1 µm | 372,9 | 23,6 x 15,8 | 3872 x 2592 | 4167 | f/10,3 | 23,4 |
| D3X | ? | CMOS | 24,4 | 1.0 х | 5,9 µm | 861,6 | 35,9 x 24 | 6048 x 4032 | 4279 | f/9,9 | 24,4 |
| D5000 / D90 | Sony | CMOS | 12.2 | 1.5 х | 5,4 µm | 369,7 | 23,7 x 15,6 | 4288 x 2848 | 4637 | f/9 | 28,8 |
| D300 (s) / D2X (s) | Sony | CMOS | 12.2 | 1.5 х | 5,4 µm | 369,7 | 23,7 x 15,6 | 4288 x 2848 | 4637 | f/9 | 28,8 |
| D800 (e) | ? | CMOS | 36,2 | 1.0 х | 4,9 µm | 861,6 | 35,9 x 24 | 7360 x 4912 | 5207 | f/8,2 | 36,3 |
| D7000/5100 | Sony | CMOS | 16. 1 | 1.5 х | 4,8 µm | 370,5 | 23,6 x 15,7 | 4928 x 3264 | 5303 | f/8,1 | 37,4 |
| S o n y | |||||||||||
| A 100/200/230/300/330 | Sony | CCD | 10.0 | 1.5 х | 6,1 µm | 372,9 | 23,6 x 15,8 | 3872 x 2592 | 4167 | f/10,2 | 23,3 |
| A900 / A850 | Sony | CMOS | 24,4 | 1.0 х | 5,9 µm | 861,6 | 35,9 x 24 | 6048 x 4032 | 4279 | f/9,9 | 24,4 |
| A500 | Sony | CMOS | 12.2 | 1.5 х | 5,7 µm | 366,6 | 23,5 x 15,6 | 4272 x 2848 | 4617 | f/9,6 | 28,6 |
| A700 | Sony | CMOS | 12.2 | 1.5 х | 5,5 µm | 368,2 | 23,5 x 15,6 | 4288 x 2856 | 4635 | f/9,2 | 28,8 |
| A350/A380 | Sony | CCD | 14.0 | 1.5 х | 5,1 µm | 369 | 23,5 x 15,7 | 4592 x 3056 | 4963 | f/8,6 | 33,0 |
| Sony A550 | Sony | CMOS | 14. 0 | 1.5 х | 5,1 µm | 365 | 23,4 x 15,6 | 4592 x 3056 | 4984 | f/8,6 | 33,3 |
| SLT-A57/35/55/A580 | Sony | CMOS | 16,0 | 1.5 х | 4,8 µm | 366,6 | 23,5 x 15,6 | 4912 x 3264 | 5309 | f/8,1 | 37,7 |
| SLT-A77 / A65 / NEX-7 | Sony | CMOS | 24,0 | 1.5 х | 3,9 µm | 366,6 | 23,5 x 15,6 | 6000 x 4000 | 6485 | f/6,5 | 54 |
| F u j i f i l m***** | |||||||||||
| S2 Pro | Fujifilm | CCD | 6,1 | 1.6 х | 7,6 µm | 356,5 | 23 x 15.5 | 3024 x 2016 | 3340 | f/12,8 | 14,9 |
| S3/S5 Pro | Fujifilm | CCD | 6,1 | 1.6 х | 7,6 µm | 356,5 | 23 x 15.5 | 3024 x 2016 | 3340 | f/12,8 | 14,9 |
| P e n t a x | |||||||||||
| K100D (Super) /K110D | Sony | CCD | 6,0 | 1. 5 х | 7,8 µm | 368,95 | 23,5 x 15,7 | 3008 x 2008 | 3251 | f/13,1 | 14,2 |
| K10D/K200D/K2000 | Sony | CCD | 10,0 | 1.5 х | 6,1 µm | 369 | 23,5 x 15,7 | 3872 x 2592 | 4185 | f/10,3 | 23,6 |
| 645D | Kodak | CCD | 39,5 | 0.7 х | 6,1 µm | 1452 | 44 x 33 | 7264 x 5440 | 4193 | f/10,2 | 24,5 |
| K-r | ? | CMOS | 12.2 | 1.5 х | 5,5 µm | 372,9 | 23,6 x 15,8 | 4288 x 2848 | 4615 | f/9,3 | 28,3 |
| K20D/K-7 | Samsung | CMOS | 14.5 | 1.5 х | 5,0 µm | 365 | 23,4 x 15,6 | 4672 x 3104 | 5071 | f/8,4 | 34,5 |
| K-5 | Sony | CMOS | 16.1 | 1.5 х | 4,8 µm | 370,5 | 23,6 x 15,7 | 4928 x 3264 | 5303 | f/8,1 | 37,4 |
| S i g m a****** | |||||||||||
| SD14/SD15/DP1/DP2 | Foveon | CMOS | 4,7 | 1. 7 х | 7,8 µm | 285,7 | 20,7 x 13,8 | 2640 x 1760 | 3239 | f/13,1 | 14,1 |
| SD1 (m) | Foveon | CMOS | 15,4 | 1.5 х | 5 µm | 384 | 24 x 16 | 4800 x 3200 | 5080 | f/8,5 | 34,6 |
| S a m s u n g | |||||||||||
| GX-20 | Samsung | CMOS | 14.6 | 1.5 х | 5,0 µm | 365 | 23,4 x 15,6 | 4688 x 3120 | 5089 | f/8,4 | 34,6 |
| NV40 | ? | CCD | 10,1 | 6,0 x | 1,7 µm | 28,2 | 6,13 x 4,60 | 3648 x 2736 | 15116 | f/2,9 | 306 |
| O l y m p u s | |||||||||||
| E400/410/420/450 | Matsushita | NMOS | 9.98 | 2.0 х | 4,7 µm | 225 | 17,3 x 13,0 | 3648 x 2736 | 5356 | f/7,9 | 38,4 |
| E510/520/E3 | Matsushita | NMOS | 9. 98 | 2.0 х | 4,7 µm | 225 | 17,3 x 13,0 | 3648 x 2736 | 5356 | f/7,9 | 38,4 |
| E620/E30/E5 | Matsushita | NMOS | 12.2 | 2.0 х | 4,3 µm | 225 | 17,3 x 13,0 | 4032 x 3024 | 5919 | f/7,3 | 48,7 |
| E-M5 | Matsushita | NMOS | 15.9 | 2.0 х | 3,7 µm | 225 | 17,3 x 13,0 | 4608 x 3456 | 6765 | f/6,3 | 63,7 |
| L e i c a | |||||||||||
| M8 | Kodak | CCD | 10 | 1.3 x | 6,8 µm | 479,7 | 26,8 x 17,9 | 3936 x 2630 | 3731 | f/11,4 | 18,1 |
| M9 | Kodak | CCD | 18,1 | 1.0 x | 6,8 µm | 864 | 36 x 24 | 5212 x 3472 | 3731 | f/11,4 | 18,1 |
| S2 | Kodak | CCD | 37.5 | 0,8 x | 6,0 µm | 1350 | 45 x 30 | 7500 x 5000 | 4230 | f/10 | 22,4 |
| H a s s e l b l a d | |||||||||||
| h4DII-31 | Kodak | CCD | 31,6 | 0,8 x | 6,8 µm | 1463 | 44,2 x 33,1 | 6496 x 4872 | 3731 | f/11,4 | 18,1 |
| h4DII-39 | Kodak | CCD | 39,0 | 0,7 x | 6,8 µm | 1807 | 49,1 x 36,8 | 7212 x 5412 | 3731 | f/11,4 | 18,1 |
| h4DII-50 | Kodak | CCD | 50,1 | 0,7 x | 6,0 µm | 1807 | 49,1 x 36,8 | 8176 x 6132 | 4230 | f/10 | 22,4 |
| P h o n e s | |||||||||||
| iPhone 3Gs | OV3650 | CMOS | 3,1 | 9. 73 x | 1,75 µm | 9,8 | 3,63 x 2,71 | 2048 x 1536 | 14343 | f/2,95 | 275 |
| iPhone 4 | OV5650 | CMOS | 5,0 | 7,64 x | 1,75 µm | 15,7 | 4,59 x 3,42 | 2592 x 1936 | 14343 | f/2,95 | 275 |
| iPhone 4s | OmniVision | CMOS | 8,0 | 7,64 x | 1,4 µm | 15,7 | 4,59 x 3,42 | 3264 x 2448 | 18100 | f/2,37 | 438,7 |
| Nokia 808 | ? | CMOS | 41,4 | 3,5 x | 1,4 µm | 81 | 10,8 x 7,5 | 7728 x 5368 | 18100 | f/2,37 | 438,7 |
В эту таблицу я вложил много сил и своего времени, её копирование запрещено (с) VladimirMedvedev.com
Примечания:
1 Mp — количество мегапикселей в фотографии 2 DLA (diffraction limited aperture) — ДОД (дифракционное ограничение диафрагмы). Самая узкая диафрагма при которой возможна попиксельная резксть (подробнее см раздел Дифракиция, перед таблицей). 3 36х24 mp — показывает предполагаемое количество пикселей на полноформатной матрице, сделанной по технологии рассматриваемой камеры. Т.е., например, если сделать полноформатную матрицу на основе Canon 50D, то она будет на 39,2 mp. 4 Пиксели Nikon D1x прямоугольные. Реальные 5 mp, получаемые с матрицы растягивались в 10 mp фотографию. Рассчитывать dpi и dla для такой техники смысла нет. 5 Fujifilm — Подсчитывая dpi сенсора у камер Fujifilm с нестандартной матрицей (с ячейками двух типов), учитывались только основные пиксели. Из-за структуры матрицы, было бы не правильно считать и основные и дополнительные пиксели. Основные пиксели занимают практически весь полезный объём, а маленькие, дополнительные, — лишь небольшие ячейки между ними (для более подробной информации смотрите официальный сайт Fujifilm). 6 Sigma — Матрицы Foveon, которые используются в камерах компании Sigma, состоят из трёх слоёв (RGB) и, в отличае от других камер, каждый пиксель на фотографии формируется из трёх пикселей матрицы. Это происходит потому, что пиксели расположены один над одним и не несут дополнительной информации о яркости (только о цвете). Именно поэтому, при матрице в ~ 14 mp, фотографии получаются всего 4 mp. Плотность пикслов рассчитывается для одного слоя.
PS Не могу не отметить, что на самом деле, фотоприёмник занимает далеко не всю площадь пикселя, некоторое место приходится уделять также и, так называемой, обвязке. Для того, чтобы увеличить полезную площадь, производители создают специальные собирающие микро-линзы на матрице:
Чем с большей площади собирают свет микролинзы, тем более эффективной должна быть, в теории, работа матрицы, и тем меньше должно быть шумов. Но это пока только в теории…
Формирование изображения в фотокамере
Матрица, фотодатчик, сенсор – это названия одного и того же устройства, входящего в конструкцию фотоаппарата и являющегося его основным элементом. По конструкции матрица это прямоугольная пластинка разных размеров из химически чистого кремния, на которой методом вакуумного напыления организовано большое количество n-p переходов. Эти переходы представляют собой светочувствительные фотодиоды или фототранзисторы. Таким образом, матрица это интегральная микросхема с несколькими миллионами светочувствительных элементов. Когда на фотодиод попадет свет, он преобразуется в электрический сигнал. В зависимости от объекта съёмки количество света может быть большим или меньшим. Электрические потенциалы с матрицы считываются построчно или поэлементно, затем обрабатываются процессором.
Что такое внутренние и внешние параметры камеры в компьютерном зрении? | by Aqeel Anwar
Photo by ShareGrid on Unsplash
Подробное объяснение внутренних и внешних параметров камеры с помощью визуализаций
Изображения являются одним из наиболее часто используемых данных в последних моделях глубокого обучения. Камеры — это датчики, используемые для захвата изображений. Они берут точки мира и проецируют их на двумерную плоскость, которую мы видим как изображения. В этой статье мы рассмотрим полную трансформацию, которая происходит в этом процессе.
Это преобразование обычно делится на две части: Внешняя и Внутренняя. Внешние параметры камеры зависят от ее расположения и ориентации и не имеют ничего общего с ее внутренними параметрами, такими как фокусное расстояние, поле зрения и т. д. С другой стороны, внутренние параметры камеры зависят от того, как она захватывает изображения. Такие параметры, как фокусное расстояние, апертура, поле зрения, разрешение и т. д., определяют внутреннюю матрицу модели камеры.
Эти внешние и внешние параметры являются матрицами преобразования, которые преобразуют точки из одной системы координат в другую. Чтобы понять эти преобразования, нам сначала нужно понять, какие системы координат используются при построении изображений.
Image By AuthorОбычно используемые системы координат в Computer Vision:
- Мировая система координат (3D)
- Система координат камеры (3D)
- Система координат изображения (2D)
- Система координат пикселей (2D)
Внешняя матрица представляет собой матрицу преобразования из мировой системы координат в систему координат камеры, а внутренняя матрица является матрицей преобразования который преобразует точки из системы координат камеры в пиксельную систему координат.
Мировая система координат (3D):
[Xw, Yw, Zw]: Это трехмерная базовая декартова система координат с произвольным началом. Например, определенный угол комнаты. Точку в этой системе координат можно обозначить как Pw = (Xw, Yw, Zw).
Изображение АвторСистема координат объекта/камеры (3D):
[Xc, Yc, Zc]: Это система координат, которая измеряется относительно начала координат/ориентации объекта/камеры. Ось Z системы координат камеры обычно направлена наружу или внутрь объектива камеры (главная ось камеры), как показано на изображении выше (ось Z направлена внутрь объектива камеры). Можно перейти от мировой системы координат к системе координат объекта (и наоборот) с помощью операций вращения и перемещения.
Image By Author Матрица преобразования 4×4, которая преобразует точки из мировой системы координат в систему координат камеры, известна как внешняя матрица камеры . Внешняя матрица камеры изменяется, если изменяется физическое расположение/ориентация камеры (например, камера на движущемся автомобиле).
Система координат изображения (2D) [Модель пинхола]:
[Xi, Yi]: 2D система координат, в которой 3D точки в системе координат камеры спроецированы на 2D плоскость (обычно перпендикулярную ось z системы координат камеры — показана желтой плоскостью на рисунках ниже) камеры с моделью обскуры.
Image By Author Лучи проходят через центр отверстия камеры и проецируются на 2D-плоскость на другом конце. 2D-плоскость — это то, что камера захватывает в виде изображений. Это преобразование с потерями, что означает, что проецирование точек из системы координат камеры на 2D-плоскость не может быть обращено (информация о глубине теряется. Следовательно, глядя на изображение, снятое камерой, мы не можем определить фактическую глубину). из точек). Координаты X и Y точек проецируются на 2D-плоскость. 2D-плоскость находится в f (фокусное расстояние) расстояние от камеры. Проекции Xi, Yi можно найти по закону подобных треугольников (луч, входящий и выходящий из центра камеры, имеет одинаковый угол с осью x и y, альфа и бета соответственно).
Следовательно, в матричной форме у нас есть следующая матрица преобразования из системы координат камеры в систему координат изображения.
Изображение АвторЭто преобразование (от камеры к системе координат изображения) является первой частью внутренняя матрица камеры .
Пиксельная система координат (2D):
[u, v]: Представляет целочисленные значения путем дискретизации точек в системе координат изображения. Пиксельные координаты изображения — это дискретные значения в диапазоне, который можно получить, разделив координаты изображения на ширину и высоту пикселя (параметры камеры — единицы измерения: метр/пиксель).
Image By AuthorСистема координат пикселей имеет начало в левом верхнем углу, поэтому наряду с дискретизацией требуется оператор перевода (c_x, c_y).
Изображение Автора Полное преобразование из системы координат изображения в пиксельную систему координат может быть показано в матричной форме, как показано ниже. Ось X и Y не 90 градусов. В этом случае необходимо выполнить еще одно преобразование для перехода от прямоугольной плоскости к наклонной плоскости (перед выполнением преобразования из изображения в пиксельную систему координат). Если угол между осями x и y равен тета, то преобразование, которое переводит точки из идеальной прямоугольной плоскости в наклонную плоскость, можно найти, как показано ниже.0005 Изображение Автор
Эти две матрицы преобразования, т. е. преобразования из прямоугольной системы координат изображения в систему координат перекошенного изображения и из системы координат перекошенного изображения в пиксельную систему координат, образуют вторую часть внутренней матрицы камеры .
Объединение трех матриц преобразования дает внешнюю матрицу камеры, как показано ниже0012 3D-3D проекция. Вращение, масштабирование, перемещение
д.) Внешняя матрица камеры (от мира к камере):
Преобразует точки из мировой системы координат в систему координат камеры. Зависит от положения и ориентации камеры.
Внутренняя матрица камеры (камера-изображение, изображение-пиксель):
Преобразует точки из системы координат камеры в пиксельную систему координат. Зависит от свойств камеры (таких как фокусное расстояние, размеры в пикселях, разрешение и т. д.)
Внешняя матрица камеры с примером на Python | by Neeraj Krishna
Часть 2 обширной серии руководств по формированию изображения и калибровке камеры в Python
В предыдущей статье я представил идею формирования изображения камерой и кратко обсудил внешние и внутренние функции камеры.
В этой статье мы подробно рассмотрим внешние особенности камеры, также называемые позой камеры, и закрепим наше понимание практическим примером на Python.
Камера может быть расположена в любой точке мира и направлена в любом направлении. Мы хотим видеть объекты в мире с точки зрения камеры, и это преобразование из мировой системы координат в систему координат камеры называется внешними параметрами камеры или позой камеры.
Система координат Word против системы координат камерыИтак, как нам найти позу камеры? Как только мы выясним, как трансформируется камера, мы сможем найти изменение базисного преобразования из мировой системы координат в систему координат камеры. Мы подробно рассмотрим эту идею.
В частности, нам нужно знать, как камера ориентирована и где она расположена в мировом пространстве, и есть два преобразования, которые нам помогут:
- Преобразование вращения, которое помогает сориентировать камеру.
- Преобразование перевода, помогающее перемещать камеру.
Рассмотрим подробно каждый из них.
Изменение координат поворотом
Рассмотрим преобразование, которое поворачивает точку на угол. Давайте возьмем простой пример в ℝ², где мы поворачиваем точку 𝑃 на угол 𝜃 в плоскости XY вокруг начала координат, чтобы получить точку 𝑃′, как показано на рисунке ниже: преобразование вращения
Координаты 𝑃 равны (𝑥,𝑦), а координаты 𝑃′ равны (𝑥′,𝑦′). Нам нужно найти (𝑥′,𝑦′).
Из рисунка
sinα = y/r , cosα = x/r − [1]
⟹ xsinα = ycosα − [2]
также x′ = rcos(θ+α)
⟹ x′ = (x /cosα) ∗ cos(θ+α) (из [1])
но, cos(θ+α) = cosθcosα − sinθsinα
⟹ x′ = (x/cosα) ∗ (cosθcosα − sinθsinα)
⟹ x′ = xcosθ − xsinα ∗ (sinθ / cosα)
⟹ x′ = xcosθ − ycosα ∗ (sinθ / cosα) (из [2])
⟹ x′ = xcosθ − ysinθАналогично,
y′ = rsin(θ+α)
⟹ y′ = (y/sinα) ∗ sin(θ+α) (из [1])
но sin(θ+α) = sinθcosα + cosθsinα
⟹ y′ = (y/sinα) ∗ (sinθcosα + cosθsinα)
⟹ y′ = ycosθ + ycosα ∗ (sinθ / sinα)
⟹ y′ = ycosθ + xsinα ∗ (sinθ / sinα) (из [2])
⟹ y′ = ycosθ + xsinθ
⟹ y′ = xsinθ + ycosθОтсюда имеем
x′ = xcosθ − ysinθ
y′ = xsinθ + ycosθ
Вращение является линейной операцией, и приведенные выше уравнения могут быть представлены в виде уравнения умножение матриц:
координат повернутой точки 𝑃′ Эта операция является линейным преобразованием. Здесь мы трансформируем точки, сохраняя оси или основание фиксированными.
Расширение до R3
Мы можем легко расширить преобразование вращения до 𝐑³. Матрицы преобразования для вращения в 𝐑³ вокруг стандартной оси X, оси Y и оси Z следующие:
Вращение вокруг оси ZВращение вокруг оси XВращение вокруг оси YВнутреннее вращение против внешнего вращения
Вышеупомянутое трансформации выполняют вращение вокруг стандартных осей. Оси будут зафиксированы в любое время. Это называется внешней ротацией. Существует еще один тип вращения, называемый внутренним вращением, когда мы вращаем объект вокруг его относительных осей на каждом шаге, как показано ниже:0005 Внутреннее вращение. Euler2.gif: Работа с производными Хуансемпера: Xavax, CC BY-SA 3.0 Внутреннее вращение трудно выполнить с помощью евклидовой алгебры, и мы придерживаться внешней ротации. Целью преобразования изменения базиса является нахождение координат точки относительно нового базиса. В приведенном ниже примере оси 𝑋𝑌 были повернуты на угол 𝜃, чтобы получить 𝑋′𝑌′. Учитывая координаты точки 𝑃 относительно старого базиса 𝑋𝑌, наша цель — найти координаты 𝑃 относительно нового базиса 𝑋′𝑌′. Координаты точки 𝑃 относительно 𝑋𝑌 равны (𝑥, 𝑦), а относительно 𝑋′𝑌′ равны (𝑥′, 𝑦′). Наша цель — найти (𝑥′, 𝑦′). Приведенные выше уравнения могут быть представлены в матричной форме как: Наша цель — найти (𝑥′,𝑦′). Очень важно, чтобы вы понимали эту разницу между линейным преобразованием и преобразованием со сменой базиса. Далее мы увидим, как связаны оба этих преобразования. Если вы заметили, изменение базисной матрицы является обратной матрицей линейного преобразования. Это означает, что если мы знаем матрицу преобразования камеры — матрицу, отвечающую за вращение и перемещение камеры в мире, мы можем взять ее обратную, чтобы получить изменение базовой матрицы, которая может помочь нам найти координаты точек относительно камеры. . Идея перемещения проста — задана точка 𝑃, мы перемещаем ее на смещение, чтобы получить точку 𝑃′, как показано на рисунке ниже: Здесь мы перемещаем точку 𝑃 с координатами (𝑥, 𝑦) на смещение (−𝑎, 𝑏), чтобы получить точку 𝑃′ с координатами (𝑥′, 𝑦′). Мы не можем выразить приведенные выше уравнения как матричное умножение — по крайней мере, не в их текущем представлении. Хитрость заключается в том, чтобы добавить дополнительное измерение, тогда мы можем выразить перевод как линейное преобразование, например: Координаты, представленные дополнительным измерением, называются однородными координатами. Чтобы вернуть евклидовы координаты из однородных координат, мы просто делим на последний элемент следующим образом: Как правило, мы выполняем все операции в однородном пространстве, так как с ним легко работать, и, наконец, когда мы закончим, мы конвертируем обратно в евклидово пространство. Мы увидим это более подробно позже. Как мы видели ранее, при преобразовании изменения базиса мы трансформируем оси, а не точки. Координаты 𝑃 относительно старых осей 𝑋𝑌 равны (𝑥, 𝑦) и относительно новых осей 𝑋′𝑌′ равны (𝑥′,𝑦′). Смещение здесь равно (𝑎, 𝑏). Опять же, чтобы представить приведенные выше уравнения в виде матричного умножения, мы используем однородные координаты: Даже при переносе линейное преобразование и преобразование изменения базиса обратны друг другу . Мы рассмотрели вращение и перемещение по отдельности; Однако мы можем выполнить обе эти операции за один раз, используя матричные композиции, как показано ниже: Здесь 𝑅 — матрица вращения формы (3, 3), а 𝑂 — смещение смещения формы (3, 1). ). Мы можем получить изменение базовой матрицы, взяв обратную матрицу окончательного преобразования. Используя 𝐸, мы можем найти координаты любой точки относительно камеры. Внешняя матрица камеры имеет 6 степеней свободы. Три угла поворота и три смещения смещения по осям X, Y, Z. Мы можем видеть, что последняя строка внешней матрицы камеры состоит только из 0 и 1. Это не добавит значения преобразованию. Его единственная цель — добавить дополнительное измерение — значение, как мы увидим в приведенном ниже примере мы могли бы просто удалить последнюю строку. Практический пример в конце похож на десерт после еды — еда неполноценна без десерта! Репозиторий GitHub со всем кодом можно найти здесь. Вы можете настроить среду, выполнив следующие команды: Примечание: Это предполагает, что у вас установлена anaconda. Мы будем использовать две основные библиотеки: В этом примере мы сначала создадим матрицы преобразования для поворота и перемещения, объединим их в единую матрицу и используем ее для преобразования камеры. Затем мы создадим базовую матрицу изменения, взяв обратную матрицу преобразования и применив ее к точке и изменив ее координаты из мирового кадра в кадр камеры. Ниже приведен блокнот для примера, который также можно найти в репозитории. Разберем пошагово: Надеюсь, вам понравилась статья. В следующей статье, которая является третьей частью серии, мы обсудим внутренние функции камеры и посмотрим, как точки проецируются на плоскость изображения камеры. Если у вас есть какие-либо сомнения или вопросы, пожалуйста, дайте мне знать в комментариях ниже. Все изображения и рисунки в этой статье, если их источник явно не указан в подписи, принадлежат автору.
Переключить боковую панель оглавления Изменение базиса вращением
Точка будет исправлена. Из рисунка
sinα = y′/r , cosα = x′/r − [1]
⟹ x′sinα = y′cosα − [2]
также x = rcos(θ+α)
⟹ x = (x′/cosα) ∗ cos(θ+α) (из [1])
но, cos(θ+α) = cosθcosα − sinθsinα
⟹ x = (x′/cosα) ∗ (cosθcosα − sinθsinα)
⟹ x = x′cosθ − xsinα ∗ (sinθ / cosα)
⟹ x = x′cosθ − y′cosα ∗ (sinθ / cosα) (из [2])
⟹ x = x′cosθ − y′sinθАналогично
y = rsin(θ+α)
⟹ y = (y′/sinα) ∗ sin(θ+α) (из [1])
но, sin(θ +α) = sinθcosα + cosθsinα
⟹ y = (y′/sinα) ∗ (sinθcosα + cosθsinα)
⟹ y = y′cosθ + y′cosα ∗ (sinθ / sinα)
⟹ y = y′cosθ + x′ sinα ∗ (sinθ / sinα) (из [2])
⟹ y = y′cosθ + x′sinθ
⟹ y = x′sinθ + y′cosθ Отсюда имеем
x = x′cosθ − y′sinθ
y = x′sinθ + y′cosθ Итак, мы перемещаем матрицу на другую сторону, принимая ее обратную: Связь между линейным преобразованием и изменением базиса
Изменение координат путем перемещения
Наша цель — найти (𝑥′, 𝑦′). из рисунка,
x′ = x - a
y′ = y + b [x, y, 1] ≅ [x/1, y/1] = [x, y]
Изменение базиса путем переноса
В приведенном ниже примере мы перемещаем оси 𝑋𝑌 на смещение, чтобы получить 𝑋′𝑌′. Наша цель — найти координаты точки 𝑃 относительно новых осей 𝑋′𝑌′. с рисунка,
х′ = х - а
y′ = y - b Это изменение базовой матрицы формы (4, 4) называется внешней матрицей камеры и обозначается 𝐸. Степени свободы
Упрощение матрицы
Настройка
# создать виртуальную среду в anaconda
conda create -n camera-calibration-python python=3.6 anaconda
conda активировать камеру-калибровку-python# клонировать репозиторий и установить зависимости
клон git https://github. com/wingedrasengan927/Image-formation-and-camera-dication.git
cd Image-formation-and-camera-калибровка
pip install -r requirements.txt
Пример Intuition
utils.py содержит все необходимые вспомогательные функции. Волшебная команда %matplotlib widget включает бэкэнд ipympl, который позволяет нам играть с графиками. [0, -8, 0] , что составляет 8 единиц по оси Y -ve.
[-1/√2, -8, 1/√2] и применяем изменение базисного преобразования, чтобы получить координаты относительно камеры как [0, 0, 1 ] . Это имеет смысл, потому что точка находится прямо над осью Z камеры.
Камера-обскура — Kornia
Изменить эту страницу
В этом модуле у нас есть все функции и структуры данных, необходимые для описания проекции пространства 3D-сцены на плоскость 2D-изображения.
В компьютерном зрении мы можем отображать трехмерный мир и двумерное изображение, используя проективную геометрию . Модуль реализует простейшую модель камеры, Pinhole Camera , которая является самой базовой моделью для общих проекционных камер из группы конечных камер.
Модель камеры-обскуры показана на следующем рисунке:
С помощью этой модели вид сцены может быть сформирован путем проецирования трехмерных точек на плоскость изображения с использованием преобразования перспективы.
\[с\; m’ = K [R|t] M’\]
или
\[\begin{split}s \begin{bmatrix} u \\ v \\ 1\end{bmatrix} = \begin{bmatrix} f_x & 0 & u_0 \\ 0 & f_y & v_0 \\ 0 и 0 и 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & r_{13} & t_1 \\ р_{21} и р_{22} и р_{23} и т_2 \\ р_{31} и р_{32} и р_{33} и т_3 \end{bmatrix} \begin{bматрица} ИКС \\ Y\\ З \\ 1 \end{bmatrix}\end{split}\]
- где:
-
- 9T\) в начале координат в плоскости изображения.
-
\(fx, fy\) — фокусные расстояния, выраженные в пикселях.
-
Вращение и перемещение камеры выражаются в евклидовой системе координат, известной как мировая система координат . Эти термины обычно выражаются совместной матрицей вращения-перемещения \([R|t]\), которая также известна как внешняя матрица. Он используется для описания положения камеры вокруг статической сцены и преобразует координаты 3D-точки \((X,Y,Z)\) из мировой системы координат в систему координат камеры .
Камера PinholeCamera ожидает внутренние матрицы и внешние матрицы
иметь форму (B, 4, 4) , так что каждая внутренняя матрица имеет следующий формат:
\[\begin{split}\begin{bmatrix} f_x & 0 & u_0 & 0\\ 0 и f_y & v_0 & 0\\ 0 и 0 и 1 и 0 \\ 0 и 0 и 0 и 1 \end{bmatrix}\end{split}\]
И каждая внешняя матрица имеет следующий формат:
\[\begin{split}\begin{bmatrix} r_{11} & r_{12} & r_{13} & t_1 \\ р_{21} и р_{22} и р_{23} и т_2 \\ р_{31} и р_{32} и р_{33} и т_3 \\ 0 и 0 и 0 и 1 \end{bmatrix}\end{split}\]
-
class kornia. geometry.camera.pinhole.PinholeCamera( встроенные , внешние , высота , ширина )[источник]
-
Класс, представляющий модель камеры-обскуры.
- Параметры
-
-
внутренности (
Тензор) – тензор формы \((B, 4, 4)\) содержащий полную матрицу калибровки камеры 4×4. -
extrinsics (
Tensor) – тензор формы \((B, 4, 4)\) содержащий полную матрицу вращения-перемещения 4×4. -
высота (
Tensor) – тензор формы \((B)\), содержащий высоту изображения. -
ширина (
Тензор) – тензор формы \((B)\), содержащий ширину изображения.
-
Примечание
Мы предполагаем, что атрибуты класса находятся в пакетной форме, чтобы принять преимущество параллелизма PyTorch для повышения производительности вычислений.
- свойство размер_пакета : целое число
-
Вернуть размер партии хранилища.
- Тип возврата
-
внутр. - Возвращает
-
скаляр с размером пакета.
- свойство camera_matrix : Тензор
-
Вернуть матрицу камеры 3×3, содержащую встроенные функции.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B, 3, 3)\).
- клон () [источник]
-
Вернуть глубокую копию текущего экземпляра объекта.
- Тип возврата
-
Камера-обскура
- свойство cx : Тензор
-
Возвращает координату x главной точки.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\).
- свойство cy : Тензор
-
Возвращает координату Y главной точки.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\).
- свойство внешние признаки : Тензор
-
Полная внешняя матрица 4×4.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B, 4, 4)\).
- свойство fx : Тензор
-
Возвращает фокусное расстояние в направлении x.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\).
- свойство fy : Тензор
-
Возвращает фокусное расстояние по оси Y.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\).
- свойство внутренние свойства : Тензор
-
Полная матрица внутренних характеристик 4×4.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B, 4, 4)\).
- inners_inverse () [источник]
-
Возвращает инверсию матрицы 4×4.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B, 4, 4)\).
- проект ( point_3d ) [источник]
-
Спроецируйте трехмерную точку в мировых координатах на плоскость двумерной камеры.
- Параметры
-
point3d – тензор, содержащий проецируемые 3d точки к плоскости камеры. Форма тензора может быть \((*, 3)\).
- Тип возврата
-
Тензор - Возвращает
-
тензор (u, v) координат кулачка формы \((*, 2)\).
Пример
>>> _ = torch.manual_seed(0) >>> X = torch.rand(1, 3) >>> K = факел.глаз(4)[Нет] >>> E = факел.глаз(4)[Нет] >>> h = torch.ones(1) >>> w = факел.единицы(1) >>> pinhole = kornia.geometry.camera.PinholeCamera(K,E,h,w) >>> pinhole.project(X) тензор([[5.6088, 8.6827]])
- свойство вращение_матрица : Тензор
-
Вернуть матрицу вращения 3×3 из внешних элементов.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B, 3, 3)\).
- свойство rt_matrix : Тензор
-
Вернуть матрицу вращения-перемещения 3×4.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B, 3, 4)\).
- масштаб( масштабный_фактор )[источник]
-
Масштабируйте модель отверстия.
- Параметры
-
scale_factor – тензор с масштабным коэффициентом. Оно имеет для трансляции с членами класса. Ожидаемая форма \((В)\) или \((1)\).
- Тип возврата
-
Камера-обскура - Возвращает
-
Модель камеры с отмасштабированными параметрами.
- масштаб_( масштаб_коэффициент )[источник]
-
Масштабируйте модель отверстия на месте.
- Параметры
-
scale_factor – тензор с масштабным коэффициентом. Оно имеет для трансляции с членами класса. Ожидаемая форма \((В)\) или \((1)\).
- Тип возврата
-
Камера-обскура - Возвращает
-
Модель камеры с отмасштабированными параметрами.
- свойство translation_vector : Тензор
-
Возвратить вектор трансляции из внешних элементов.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B, 3, 1)\).
- свойство tx : Тензор
-
Возвращает координату x вектора перемещения.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\).
- свойство ty : Тензор
-
Возвращает координату y вектора перемещения.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\).
- свойство tz : Тензор
-
Возвращает z-координату вектора перемещения.
- Тип возврата
-
Тензор - Возвращает
-
тензор формы \((B)\).
- unproject( point_2d , глубина )[источник]
-
Отменить проецирование 2d точки в 3d.
Преобразование координат в кадре пикселей в кадр мира.
- Параметры
-
-
point2d – тензор, содержащий 2d, который нужно проецировать на мировые координаты. Форма тензора может быть \((*, 2)\).
-
depth (
Tensor) — тензор, содержащий значение глубины каждого 2d точки. Форма тензора должна быть равна point2d \((*, 1)\). -
normalize – нормализовать ли облако точек. Этот должен быть установлен на True , когда глубина представлена как евклидова длина луча от положения камеры.
-
- Возвращает
-
тензор (x, y, z) мировых координат формы \((*, 3)\).
Пример
>>> _ = torch.manual_seed(0) >>> x = torch.rand(1, 2) >>> глубина = torch.ones(1, 1) >>> K = факел.глаз(4)[Нет] >>> E = факел.глаз(4)[Нет] >>> h = torch.ones(1) >>> w = факел.единицы(1) >>> pinhole = kornia.
geometry.camera.PinholeCamera(K,E,h,w)
>>> pinhole.unproject(x, глубина)
тензор([[0,4963, 0,7682, 1,0000]])
- kornia.geometry.camera.pinhole.cam2pixel( cam_coords_src , dst_proj_src , eps=1e-12 )[источник]
-
Преобразование координат в кадре камеры в кадр пикселей.
- Параметры
-
-
cam_coords – (x, y, z) координаты, определенные в системе координат первой камеры. Форма должна быть BxHxWx3.
-
dst_proj_src (
Tensor) — матрица проекции между опорный и не опорный кадр камеры. Форма должна быть Bx4x4. -
eps (
float, option ) — маленькое значение, чтобы избежать ошибки деления на ноль. По умолчанию:1e-12
-
- Тип возврата
-
Тензор - Возвращает
-
тензор формы BxHxWx2 с координатами (u, v) пикселей.
- kornia.geometry.camera.pinhole.pixel2cam( depth , inners_inv , pixel_coords )[источник]
-
Преобразование координат в кадре пикселей в кадр камеры.
- Параметры
-
-
depth (
Tensor) — исходные карты глубин. Форма должна быть Bx1xHxW. -
inners_inv (
Tensor) — обратная внутренняя матрица камеры. Форма должна быть Bx4x4. -
pixel_coords (
Tensor) — сетка с координатами (u, v, 1) пикселей. Форма должна быть BxHxWx3.
-
- Тип возврата
-
Тензор - Возвращает
-
тензор формы BxHxWx3 с координатами (x, y, z) кулачка.
тримеш.сцена.камеры — документация тримеш 3.15.2
-
класс тримеш.сюжетные.камеры. Камера( имя=Нет , разрешение=Нет , focus=Нет , fov=Нет , z_near=0.01 , z_far=1000.0 )
-
Базы:
объект- собственность К
-
Получить внутреннюю матрицу для объекта Камера.
- Возвращает
-
K – Внутренняя матрица для камеры
- Тип возврата
-
(3, 3) поплавок
-
__init__( имя=Нет , разрешение=Нет , focus=Нет , fov=Нет , z_near=0.01 , z_far=1000.10 1
- 0 ) 1
Создайте новый объект камеры, в котором хранятся встроенные функции камеры. и внешние параметры.
TODO: перекос не поддерживается TODO: cx и cy, которые не равны половине ширины и высоты
- Параметры
-
-
наименование ( стр или Нет ) – Имя камеры, которое будет использоваться в качестве имени узла
-
разрешение ( ( 2 , ) int ) – Размер пикселя в (высота, ширина)
-
фокусное ( ( 2 , ) плавающее ) — Фокусное расстояние в пикселях.
Либо пройти это ИЛИ FOV
но не оба. фокус = (К[0][0], К[1][1]) -
fov ( ( 2 , ) float ) — Поле зрения (fovx, fovy) в градусах
-
z_near ( float ) — Что ближе всего
-
- 0 ) 1
- углы()
-
Получить сферические координаты луча в радианах.
- Возвращает
-
углов – Лучевые сферические координатные углы в радианах.
- Тип возврата
-
(n, 2) плавающий
- копировать()
-
Безопасное получение копии текущей камеры.
- свойство фокус
-
Получить фокусное расстояние камеры в пикселях.
- Возвращает
-
фокусное – Фокусное расстояние в пикселях
- Тип возврата
-
(2,) плавающий
- свойство fov
-
Получить поле зрения в градусах.
- Возвращает
-
fov – XY поле зрения в градусах
- Тип возврата
-
(2,) плавающий
- look_at( точек , **kwargs )
-
Создать преобразование для камеры, чтобы сохранить список точек в поле зрения камеры.
- Параметры
-
-
точек ( ( n , 3 ) с плавающей запятой ) – 9005 точек в пространстве
-
Ротация ( Нет , или ( 4 , 4 ) Float ) — Матрица вращения для начального ротации
222222
-
Distance ( None или float ) – Расстояние от камеры до центра
-
центр ( Нет , или ( 3 , ) плавающее поле ) – Центр поля зрения
-
- Возвращает
-
transform — Матрица трансформации из мира в камеру
- Тип возврата
-
(4, 4) поплавок
- свойство разрешение
-
Получить разрешение камеры в пикселях.
- Возвращает
-
Разрешение камеры в пикселях
- Тип возврата
-
разрешение (2,) с плавающей запятой
- to_rays()
-
Расчет векторов направления луча.
Возвращает один луч на пиксель, как указано в self.resolution.
- Возвращает
-
векторов – Векторы направления лучей в кадре камеры с z == -1
- Тип возврата
-
(n, 3) плавающий
- trimesh.scene.cameras.camera_to_rays( камера )
-
Вычислить объект trimesh.scene.Camera по векторам направления.
Возвращает один луч на пиксель, как указано в camera.resolution.
- Параметры
-
камера ( тримеш.сцена.Камера ) –
- Возвращает
-
векторов – Векторы направления лучей в кадре камеры с z == -1
- Тип возврата
-
(n, 3) плавающий
-
trimesh. scene.cameras.look_at( точек , fov , вращение = нет , расстояние = нет , центр = нет , пэд = нет )
-
Создать преобразование для камеры, чтобы сохранить список точек в поле зрения камеры.
Примеры
`питон точки = np.массив ([0, 0, 0], [1, 1, 1]) scene.camera_transform = scene.camera.look_at(точки) `- Параметры
-
-
точек ( ( n , 3 ) с плавающей запятой ) – 9005 точек в пространстве
-
fov ( ( 2 , ) float ) – Поле зрения, в ГРАДУСАХ
-
поворот ( Нет или ( 4 , 4 ) float ) – Матрица вращения для начального вращения
-
Distance ( None or float ) – Расстояние от камеры до центра
-
центр ( Нет , или ( 3 , ) плавающее поле ) – Центр поля зрения
-
- Возвращает
-
преобразование — Трансформация матрицы из мира в камеру
- Тип возврата
-
(4, 4) поплавок
-
trimesh. scene.cameras.ray_pixel_coords( камера )
-
Получить x-y координаты лучей в координатах камеры в г == -1.
Для каждого пикселя будет дана одна пара координат, как определено в камера.разрешение. При изменении формы возвращаемый массив соответствует в пикселях визуализируемого изображения.
Примеры
«`питон xy = ray_pixel_coords(камера).reshape(
кортеж(координаты камеры) + (2,))
верхний_левый == ху [0, 0] нижнее_правое == ху [-1, -1] «`
- Параметры
-
camera ( trimesh.scene.Camera ) — Объект камеры для генерации лучей от
- Возвращает
-
xy – x-y координаты пересечения каждого луча камеры с z == -1 кадр
- Тип возврата
-
(n, 2) плавающий
Калибровка камеры и оценка основной матрицы с помощью RANSAC
Проект 5: Калибровка камеры и оценка основной матрицы с помощью RANSACСтруктура из нескольких изображений.
Рисунок Snavely et
др.
Логистика
- Шаблон: Project5_CameraCalibration
- Часть 1: Вопросы
- Вопросы + шаблон: Теперь в репозитории: вопросы/
- Процесс сдачи: Gradescope в формате PDF. Отправляйте анонимные материалы пожалуйста!
- Часть 2: Код
- Шаблон записи: В репозитории: запись/
- Требуемые файлы: code/, writeup/writeup.pdf
- Процесс передачи: Gradescope в качестве репозитория GitHub. Представлять на рассмотрение анонимные материалы пожалуйста!
Обзор
Цель этого проекта — познакомить вас с геометрией камеры и сцены. Конкретно оценим камеру
матрица проекции, которая отображает координаты трехмерного мира в координаты изображения, а также фундаментальная матрица, которая
связывает точки в одной сцене с эпиполярными линиями в другой. Матрица проекции камеры и основная матрица
каждый из них можно оценить с помощью точечных соответствий. Чтобы оценить проекционную матрицу — внутреннюю и внешнюю
калибровка камеры — на входе соответствующие 3d и 2d точки. Чтобы оценить фундаментальную матрицу, вход
соответствует 2d точкам на двух изображениях. Вы начнете с оценки проекционной матрицы и
фундаментальная матрица для сцены с наземными истинными соответствиями. Затем вы перейдете к оценке фундаментальных
матрица с использованием точечных соответствий из SIFT и RANSAC.
Помните эти сложные изображения Епископского дворца Гауди из Проекта 2? С помощью RANSAC найти фундаментальной матрицы с наибольшим количеством вкраплений, мы можем отфильтровать ложные совпадения и добиться почти идеальной точки для сопоставление точек, как показано ниже:
Детали и стартовый код
Этот проект состоит из трех частей:
- Оценка проекционной матрицы,
- Оценка фундаментальной матрицы и
- Надежная оценка фундаментальной матрицы с помощью RANSAC на основе ненадежных совпадений SIFT.
Эти три задачи могут быть реализованы в student.py .
Часть I: Матрица проекции камеры
Учитывая известные соответствия точек 3D и 2D, как мы можем восстановить матрицу проекции, которая преобразуется из трехмерного мира? координаты в координаты 2D-изображения? Напомним, что при использовании однородных координат уравнение перехода из 3D координаты мира в 2D-камеру:
$$\begin{pmatrix}u \\ v \\ 1\end{pmatrix} \cong \begin{pmatrix}su \\ sv \\ s \end{pmatrix}= M \begin{pmatrix}X \\ Y \\ Z \\ 1 \end{pmatrix} = \begin{pmatrix}m_{11} & m_{12} & m_{13} & m_{14} \\ м_{21} и м_{22} и м_{23} и м_{24} \\ m_{31} & m_{32} & m_{33} & m_{34} \end{pmatrix} \begin{pmatrix}X \\ Y \\ Z \\ 1 \end{pmatrix}$$
Наша задача — найти M. Мы собираемся составить систему линейных уравнений, чтобы найти регрессию по методу наименьших квадратов.
решение для этих параметров матрицы камеры с учетом соответствий между точками 3D-мира и точками 2D-изображения. В
класса, мы увидели два решения этой проблемы, которые требуют перестановки коэффициентов 3D и 2D
точечные доказательства:
С помощью этих перестановок мы можем настроить нашу линейную регрессию, чтобы найти элементы матрицы M.
Однако в проективной геометрии матрица M определена только до неизвестного масштаба. Фактически эти уравнения
иметь множество различных возможных решений. В случае вырожденного решения M = все нули, что не очень полезно.
в нашем контексте.
Мы рассмотрим два способа обойти это:
- Мы можем исправить масштаб, установив последний элемент \(m_{34}\) равным 1, а затем найдя остальные коэффициенты,
- Мы можем использовать разложение по сингулярным числам для непосредственного решения задачи оптимизации с ограничениями, в которой установлен масштаб: $$\begin{align*} &\min\|Ax \| \\ &s.t ~ \| х \| = 1\конец{выравнивание*}$$
Восстановив вектор значений одним из этих методов, мы должны преобразовать его в предполагаемую камеру. проекционная матрица М.
Чтобы помочь вам проверить M, мы предоставляем оценочный код, который вычисляет общую «остаточную ошибку» между прогнозируемыми
Двухмерное местоположение каждой трехмерной точки и фактическое местоположение этой точки на двухмерном изображении. Остаток является евклидовым
расстояние в плоскости изображения (квадратный корень из суммы квадратов разностей u и v). Это должно быть очень
маленький — порядка пикселя. Мы также предоставляем набор «нормализованных точек» в файлах
./pts2d-norm-pic_a.txt и ./pts3d-norm.txt. Стартовый код загрузит эти 20 соответствующих нормализованных 2D и
3D точки. Если вы решаете для M, используя все точки, вы должны получить матрицу, которая является масштабированным эквивалентом матрицы.
следующая матрица:
Имея эту матрицу, мы можем спроецировать трехмерные точки мира на плоскость нашей камеры. Например, эта матрица примет нормализованная 3D точка и спроецируйте его на 2D-изображение (после преобразования однородной 2D-точки к его неоднородному варианту путем деления на s).
Когда у нас есть точная проекционная матрица M, можно разложить ее на более знакомые и более
полезная матрица K внутренних параметров и матрица [R | T] внешних параметров. Для этого проекта мы будем только
попросить вас оценить один конкретный внешний параметр: центр камеры в мировых координатах. Определим M как
состоит из матрицы 3×3, называемой Q, с 4-м столбцом m_4:
Центр камеры C можно найти с помощью: 9{-1} м_4$$
Если мы используем приведенные выше нормализованные 3D-точки и M, мы получим центр камеры:
$$C _{\text{норма}A} = $$Мы также предоставили визуализацию, которая покажет примерное трехмерное расположение камеры относительно нормализованные трехмерные координаты точки.
Часть II. Оценка фундаментальной матрицы
Следующая часть этого проекта состоит в том, чтобы оценить отображение точек на одном изображении в линии на другом с помощью
фундаментальная матрица. Это потребует от вас использования тех же методов, что и в части 1. Мы воспользуемся
соответствующие местоположения точек перечислены в pts2d-pic_a. txt и pts2d-pic_b.txt. Напомним, что определение
фундаментальная матрица:
Фундаментальная матрица иногда определяется как транспонирование вышеуказанной матрицы с левым и правым изображением. точки поменялись местами. Обе являются действительными фундаментальными матрицами, но функции визуализации в начальном коде предполагают, что вы используете приведенную выше форму.
Другой способ записи этого матричного уравнения:
$$\begin{pmatrix}u’ & v’ & 1\end{pmatrix}\begin{pmatrix}f_{11}u + f_{12}v + f_{13} \\ f_{21}u + f_{22}v + f_{23} \\ f_{31}u + f_{32}v + f_{33} \end{pmatrix} = 0$$Что то же самое, что:
$$\begin{pmatrix}f_{11}uu’ + f_{12}vu’ + f_{13}u’ + f_{21}uv’ + f_{22}vv’ + f_{23}v’ + f_ {31}и + ф_{32}в + ф_{33} \end{pmatrix} = 0$$
Благодаря этому мы можем построить линейную систему для решения с помощью регрессии наименьших квадратов. Для каждой неизвестной переменной мы
нужно одно уравнение, чтобы ограничить наше решение. Пара соответствующих точек даст одно уравнение для нашего
система. Однако, как и в части I, эта матрица определена только в масштабе, а вырожденное нулевое решение решает
эти уравнения. Нам нужно зафиксировать масштаб и решить, используя те же методы, что и в части 1. Это дает нам возможность
решить систему с 8-точечными соответствиями (или более, поскольку мы восстанавливаем наилучший метод наименьших квадратов, соответствующий всем точкам).
Оценка F методом наименьших квадратов имеет полный ранг; однако фундаментальная матрица является матрицей ранга 2. Таким образом, мы
должен понизить свой ранг. Для этого мы можем разложить F, используя разложение по сингулярным числам, на матрицы U ΣV’
= F. Затем мы можем оценить матрицу ранга 2, установив наименьшее сингулярное значение в Σ равным нулю, таким образом генерируя
Σ2. Тогда фундаментальная матрица легко вычисляется как F = U Σ2 V’. Мы можем проверить нашу фундаментальную матрицу
оценка путем построения эпиполярных линий с использованием функции построения, предусмотренной в начальном коде.
Часть III: Фундаментальная матрица с RANSAC
Учитывая две фотографии сцены, маловероятно, что наша точка соответствия для выполнения регрессии для фундаментальной матрицы все было бы правильно. Наша следующая задача — использовать RANSAC для надежной оценки фундаментальная матрица из ненадежных точечных соответствий, вычисленная с помощью детектора характерных точек. Мы моделируем шума (поскольку мы используем наземные точки истинности) с помощью двух видов шумовых функций.
Сначала мы просим вас написать функцию позиционного шума. Это примет интервал и добавит некоторое значение
(выбирается равномерно случайным образом) из интервала, в основном искажая координаты совпадений на некоторые
количество. Это необходимо сделать только для некоторого процента точек, указанных в аргументах функции.
Другие наши функции вносят шум в совпадения, случайным образом меняя местами некоторые подмножества совпадений. Итак, если вы имеют 100 баллов и просят добавить шума до 30%, то 30 баллов следует перетасовать в списке. Обратите внимание, мы хотите переключить точки на изображении A, совпадающие с другими точками на изображении B, а не поменять местами индексы указывает на себя.
Стартовый код использует совпадения с земной истиной (вместе с флагом для выполнения сопоставления характерных точек с ORB).
дескриптор) для пары изображений. По желанию, мы возмущаем эти матчи шумом, используя ваши функции, которые вы
только что написал. Мы будем использовать эти возможные точечные соответствия и RANSAC, чтобы попытаться найти хорошую фундаментальную матрицу.
Мы будем итеративно выбирать случайный набор точечных соответствий (например, 8, 9 или некоторое небольшое количество точек),
найдите фундаментальную матрицу, используя функцию, которую вы написали для части II, а затем подсчитайте количество вставок.
Вкладыши в этом контексте будут точечными соответствиями, которые «согласуются» с оцененной фундаментальной матрицей. К
подсчитайте, сколько внутренних элементов имеет фундаментальная матрица, вам понадобится метрика расстояния, основанная на фундаментальной матрице.
матрица. (Подсказка: для точечного соответствия (x’,x) какими свойствами обладает фундаментальная матрица?). Ты сможешь
также необходимо выбрать порог между выбросами и выбросами. Результаты будут очень чувствительны к этому
порог, поэтому изучите диапазон значений, который устанавливает баланс между разрешением и исключением. Мы также должны
принять решение о критериях остановки для RANSAC, например, учитывая тысячи итераций RANSAC. После остановки,
вернуть фундаментальную матрицу с наибольшим количеством вкладышей. 98 = 0,39% шанс
случайным образом выбрать 8 неверных соответствий при оценке фундаментальной матрицы. Правильная фундаментальная матрица
должно иметь больше выбросов, чем выбросов, созданных из ложных совпадений, иначе проблема не разрешима.
Для некоторых реальных изображений оцениваемая фундаментальная матрица может подразумевать невозможную связь между камеры, например, эпиполь в центре одного изображения, когда камеры на самом деле имеют большую трансляционную параллель к плоскости изображения. Предполагаемая фундаментальная матрица также может быть неверной, поскольку мировые точки компланарные, или потому что камеры на самом деле не являются камерами-обскурой и имеют искажения объектива. Тем не менее, эти «неправильные» фундаментальные матрицы, как правило, удаляют неправильные совпадения характерных точек (и, к сожалению, многие тоже правильные).
Оценка и визуализация
Для части I мы предоставили ожидаемый результат (матрица M и центр камеры C). Это численные оценки, поэтому мы не будем проверять точные цифры, только приблизительно правильные местоположения.
В части II вас будут оценивать на основе вашей оценки фундаментальной матрицы. Вы можете проверить, насколько хорош ваш
оценка фундаментальной матрицы путем рисования
эпиполярные линии на одном изображении, которые соответствуют точке на другом изображении. Вы должны увидеть все эпиполярные
линии, пересекающие соответствующую точку в другом
изображение, как это:
Мы предоставляем вам функцию в начальном коде, которая рисует эпиполярную линию на изображении с учетом фундаментальной матрица и точка с другого изображения.
Часть III является наиболее открытой частью этого задания. Ваша цель должна состоять в том, чтобы продемонстрировать, что вы можете
оценить фундаментальную матрицу для пары реальных изображений и использовать ее для отклонения ложных совпадений ключевых точек. Мы можем проверить
фундаментальную матрицу, которую вы оцениваете, и вы должны визуализировать исправленное изображение в своем отчете. Кроме того,
мы требуем, чтобы вы реализовали функции шума и исследовали влияние шума на то, насколько хорошо работает RANSAC.
Мы не включаем оценку точности ключевых точек, используемую в проекте 2. Вы должны быть в состоянии получить почти идеальный результат. точность (очень мало выбросов) среди ключевых точек, которые вы обозначили как выбросы.
Данные
Мы предоставляем двухмерные и трехмерные соответствия точек истинности для базовой пары изображений (pic_a.jpg и pic_b.jpg) и для трех используемых изображений.
Запрещенные функции
Вы должны построить матрицы для калибровки камеры и оценки F-матрицы самостоятельно, но вы можете использовать готовые линейные решатели. Вы также должны внедрить RANSAC самостоятельно. Вы также должны написать шум функции самостоятельно. Не стесняйтесь использовать функции numpy.
Примечания по нормализации координат
Ваша оценка фундаментальной матрицы может быть улучшена путем нормализации координат перед вычислением
фундаментальная матрица. Рекомендуется выполнить нормализацию с помощью линейных преобразований, как описано
ниже, чтобы сделать среднее значение точек равным нулю, а среднюю величину около 1,0 или какое-то другое небольшое число (квадрат
также рекомендуется корень из 2).
Матрица преобразования T является произведением матриц масштаба и смещения. c_u и c_v — средние координаты.
Чтобы вычислить шкалу s, вы можете оценить стандартное отклонение после вычитания средних значений. Затем шкала
фактор s будет обратным любой оценке шкалы, которую вы используете. Или вы можете найти максимум
абсолютная величина. Или вы можете масштабировать координаты так, чтобы средний квадрат расстояния от начала координат (после
центрирование) равно 2. Вы можете использовать одну масштабную матрицу на основе статистики координат обоих изображений или
вы можете сделать это для каждого изображения. 9{T} @ F_{норма} @ T_{a}$$
Это можно реализовать в вашей функции Assessment_fundamental_matrix() написанной для части II, но
на самом деле вы не заметите разницы во второй части, потому что входные соответствия практически идеальны. В
часть III (которая вызывает Assessment_fundamental_matrix() ), вы, скорее всего, заметите улучшение.
В качестве альтернативы вы можете реализовать масштабирование на основе распределения координат всех объектов, а не только
горстка перешла в оценка_фундаментальная_матрица() . В своем письме вы должны выделить один
до и после случая, когда нормализация улучшила ваши результаты.
Рецензия
Опишите свой процесс и алгоритм, покажите свои результаты, опишите любые дополнительные баллы и сообщите нам любые другие
информация, которую вы считаете актуальной. Мы предоставляем вам шаблон LaTeX writeup/writeup.tex . Пожалуйста
скомпилируйте его в PDF и отправьте вместе с кодом.
Не забудьте включить следующие детали в описание вашего метода:
- Ваша оценка проекционной матрицы и центра камеры.
- Ваша оценка фундаментальной матрицы для пары базовых изображений (pic_a.jpg и pic_b.jpg).
- Покажите нам соответствия (и исправленное изображение) с увеличением уровня шума обоих видов. Сравните, как Оценка RANSAC и ванили выполняется на каждом уровне. Напишите, что вы думаете о том, насколько хорошо работает RANSAC.
- Покажите нам, что произойдет, если использовать функции ORB вместо читов по процентным очкам. Детализируйте свой выводы.
Мы проводим анонимную оценку TA, поэтому, пожалуйста, не указывайте свое имя или удостоверение личности в описании или коде.
Рубрика
- +10 баллов: Правильная постановка системы уравнений регрессии методом наименьших квадратов для проекции
матрица.
- +10 баллов: Правильное решение для матрицы проекции и правильное решение для центра камеры.
- +10 баллов: Правильная настройка фундаментальной матричной регрессии.
- +10 баллов: Правильное решение фундаментальной матрицы и создание хороших эпиполей на образцах изображений.
- +8 баллов: Корректная реализация шумовых функций.
- +27 баллов: Правильное сочетание RANSAC с фундаментальной матричной оценкой и генерация правильного исправления картинки.
- +05 баллов: Запишите.
- -05*n баллов: где n — количество раз, когда вы не следуете инструкциям по сдаче.
Дополнительный кредит
Пожалуйста, задокументируйте в своем письме, какие дополнительные кредиты вы сделали, и подробно опишите их результат.
- до 3 баллов: функция пользовательского шума.
- до 5 баллов: улучшите код вашего проекта 2, используя методы этого проекта.
- до 10 баллов: используйте другую процедуру RANSAC (и сравните ее производительность с базовой RANSAC), например:
- МАГСАК (реализация C++) (реализация Python)
- MLESAC (реализация C++ через PCL) (привязки Python для PCL)
- до 10 баллов: обучение современному алгоритму обнаружения точек или алгоритму соответствия для глубокого обучения.
- Пример: Йи и др., «Учимся находить хорошие соответствия» (GitHub)
Кредиты
Этот проект основан на проекте CS 4495, предложенном Аароном Бобиком в GATech, и был расширен и под редакцией Генри Ху, Грэди Уильямса и Джеймса Хейса. Элеонора Турсман адаптировала код для Python с помощью Анна Сабель.
типы, размер, разрешение, чувствительность, очистка
Ни одна камера не может обойтись без матрицы. Современные модели оснащены ею почти все. Это произошло в тот момент, когда цифровые аналоги стали вытеснять устаревшие пленочные технологии. Матрица камеры является одним из основных компонентов, без которого невозможна работа всего устройства в целом, ведь его роль если не ключевая, то, по крайней мере, может считаться одной из ведущих. Именно матрица отвечает за качество будущего изображения, цветопередачу, четкость, полноту кадра. Как и другие важные элементы фототехники, матрица имеет ряд основных параметров, на которые обычно ориентируются при выборе той или иной модели.
Содержание
- 1 Типы матрицы
- 2 Размер физической матрицы
- 3 Количество мегапикселей и матриц Матрица цифрового фотоаппарата – это, прежде всего, чип . Преобразует световые лучи, которые, преломившись в системе линз и зеркал, попадают на него. В результате такого преобразования получается электрический сигнал, который отображается в цифровом виде, формируя снимок. За весь этот процесс отвечают специальные фотодатчики, расположенные на самой плате. Чем больше количество сенсоров, чувствительных к свету, тем выше разрешение и, как следствие, качество конечного изображения.
Существуют матрицы следующих типов.
- ПЗС — тип матрицы камеры , что буквально означает устройство с зарядовой связью. В английской версии — Charge-Coupled Device. Очень известная аббревиатура, которая, впрочем, не так уж и распространена в наши дни. Многие используют устройства на основе светодиодов с высокой чувствительностью, на базе ПЗС-системы, но, несмотря на большую распространенность, этот тип микросхем все чаще вытесняется более современными.
- КМОП-матрица . Формат Matrix, введен в эксплуатацию в 2008 году. Однако история создания этого формата уходит корнями в далекий 93-й, когда впервые была опробована технология АПС. Матрица CMOS представляет собой комплементарный полупроводник на основе оксида металла. Эта технология позволяет производить выборку отдельного пикселя практически так же, как и в стандартной системе памяти; кроме того, каждый пиксель оснащен дополнительным усилителем. Так как эта система более современная, она часто снабжена автоматической регулировкой времени экспозиции каждого пикселя в отдельности. Это улучшение позволяет получить полный кадр без потери боковых границ, а также без потери верхней и нижней части кадра. Полноразмерная матрица чаще всего изготавливается по технологии CMOS.
- Есть еще один тип матрицы — Live MOS-матрица . Он был выпущен компанией «Панасоник». Этот чип работает с помощью технологии, в основе которой лежит МОП. MOS-матрица позволяет делать качественные профессиональные изображения без высокого уровня шума, а также исключает перегрев.
Физический размер матрицы
Размер матрицы камеры — одна из важнейших ее характеристик. Как правило, указывается в дюймах в виде дроби. Больший размер означает меньше шума в финальном кадре. Кроме того, чем больше физический размер, тем больше световых лучей способна зарегистрировать матрица. Объем и количество лучей напрямую влияют на качество передачи оттенков и тонов.
Кроп-фактор — это отношение размера кадра 35-мм пленочной камеры к матрице цифровой камеры. . Дело в том, что процесс создания цифровой матрицы довольно затратный, и поэтому производители постарались минимизировать ее размеры.
Если сравнить фото, сделанное одним объективом на камеру с полнокадровой матрицей и камеру с «кривой» матрицей, то в первом случае угол охвата будет больше, а изображение сама будет шире. Получается, что кропнутая матрица обрезает готовую картинку, отсюда и название — cropped с англ. обрезать (обрезать).
Чаще всего кроп-фактор используют для измерения максимально точного расстояния фокусировки объектива, устанавливая его на различные устройства. Вот тут-то и появилось такое понятие, как эквивалентных фокусных расстояний (ЭФР), которые вычисляются путем умножения фокусного расстояния (ФР) на кроп-фактор. Так, объектив с полнокадровой матрицей (кроп = 1) и объектив с ФР 50 мм будут захватывать тот же размер изображения, что и кроп-матрица 1.
6 с объективом 30 мм с ФР. В этом случае можно сказать, что ЭФР этих объективов одинаковое. Ниже представлена таблица, в которой можно провести сравнение того, как меняется ЭФР в зависимости от кроп-фактора. Количество мегапикселей и разрешение матрицы
Сама матрица дискретная. В его состав входит более миллиона элементов, преобразующих световой поток, исходящий от линз. В характеристике каждой модели фотоаппарата можно найти такой параметр платы матрицы, как количество светочувствительных элементов или разрешение матрицы, измеряемое в мегапикселях.
Один мегапиксель равен одному миллиону светочувствительных сенсоров, улавливающих лучи, преломленные линзами. Конечно, чем больше будет этот параметр, тем качественнее получится картинка.
Правда, есть обратная зависимость. Если физический размер матрицы меньше, то и количество мегапикселей должно быть пропорционально меньше, иначе не избежать эффекта дифракции: фотографии будут размытыми, без четкости.
Чем больше размер пикселя, тем больше он способен фиксировать падающие на него лучи. Размер пикселей напрямую связан с размером матрицы и влияет в основном на ширину кадра . Чем больше количество мегапикселей при правильном соотношении размеров матрицы, тем больше лучей света смогут поймать сенсоры. Количество фиксированных лучей напрямую влияет на исходные параметры конвертируемого материала: резкость, цвет, объем, контрастность, фокус.
Таким образом, разрешение камеры влияет на качество изображения . Зависимость разрешения от количества используемых пикселей очевидна. В объективе с помощью сложного расположения оптических элементов формируется необходимый световой поток, который затем матрица будет делить на пиксели. Оптические устройства также имеют собственное разрешение. Более того, если разрешающая способность объектива достаточно мала, а передача двух светящихся точек, разделенных одной темной, происходит как единое целое, то разрешающая способность будет различима не так отчетливо.
Происходит это именно из-за прямой зависимости и привязки к количеству мегапикселей. Важно: на качественное изображение влияет как параметр разрешения матрицы, так и разрешение оптики объектива. Измеряется количеством линий на 1 мм. Разрешение достигает своего максимального значения, когда оба показателя — матрица и объектив — соответствуют друг другу.
Если говорить о разрешении современных цифровых микросхем, то оно складывается из размера пикселя (от 2 до 8 мкм). На сегодняшний день на рынке представлены модели с производительностью до 30 мп.
Светочувствительность
В фотоаппаратах по отношению к матрице принято использовать термин эквивалент светочувствительности . Это связано с тем, что истинная чувствительность может быть измерена различными способами в зависимости от набора параметров матрицы. Но применяя усиление сигнала и цифровую обработку, пользователь может обнаружить высокие пределы чувствительности.
Параметры светочувствительности демонстрируют способность исходного материала преобразовывать электромагнитные эффекты потока света в электрический двоичный сигнал. Проще говоря, показать, сколько света требуется для получения объективного уровня электрического импульса на выходе.
Параметр чувствительности (ISO) чаще всего используется фотографами для демонстрации возможности съемки в условиях низкой освещенности. Повышение чувствительности в параметрах прибора позволяет улучшить качество конечного изображения при необходимых значениях диафрагмы и выдержки. ISO может достигать значений от нескольких десятков до тысяч и десятков тысяч единиц. Отрицательной стороной высокой чувствительности является появление «шума» , проявляющегося в виде эффекта зернистости кадра.
Как почистить матрицу в домашних условиях
Битые пиксели могут быть не всегда. На самом деле, когда происходит смена объектива, частицы мусора могут попасть на матрицу, вызывая эффект битых пикселей «.
Чистка матрицы камеры нужна для предотвращения этого эффекта, а также для более комфортной работы с устройством. Со временем, особенно при длительной эксплуатации устройства в различных погодных условиях, матрица может покрыться пылью . При нарушении герметичности в районе байонета на поверхность может попасть небольшое количество влаги, что также может негативно сказаться на качестве оправы. Уборку можно доверить профессионалам из сервисного центра, а можно сделать самостоятельно, в домашних условиях.
Важно помнить, что помещение, в котором будет проходить процедура, должно быть максимально пыльным, без сильных сквозняков. Прежде чем приступить к самой процедуре, необходимо убедиться, что аккумулятор заряжен.
Первый и самый простой способ очистить стеклянную поверхность чипа кремниевой пластины — выдувание пыли . Для этого используйте самый обычный очиститель для линз, он продается в любом крупном хозяйственном магазине.
К сожалению, использование груши помогает только при удалении легкого налета мелких пылевых песчинок. Для более крупных частиц, которые могут прилипнуть к поверхности, может потребоваться что-то более твердое. Если груша не помогла справиться с пятнами на матрице, можно попробовать использовать специальный набор для очистки поверхности стекла . Стоит немного дороже, но и эффективность очистки гораздо выше.
- Первым пунктом в уборке является использование специального пылесоса . Его сборка не занимает много времени и подробно описана в инструкции к набору. На конце устройства находится мягкий наконечник, благодаря чему исключается повреждение устройства во время работы. Лучше всего чистить пылесосом не только стеклянную поверхность, но и все полости, которые доступны для очистки.
- После уборки пылесосом можно приступать к влажной уборке. Осуществляется специальными кистями одна из которых влажная, другая сухая. Этот вид очистки нужен для частиц пыли, которые, будучи влажными, попадали на поверхность стекла, а высохнув, прикреплялись к ней, создавая эффект «битого пикселя». Влажная щетка, пропитанная специальным раствором, эффективно удаляет засохшие песчинки и пыль, не оставляя разводов и разводов. Проводить по стеклу нужно плавными нежными движениями, лишь слегка нажимая на саму кисть. Оставшаяся влага довольно быстро испарится сама. Даже если после влажной уборки на стекле останется пара капель, их прекрасно можно удалить сухой щеткой (щеткой).
- Третий этап является заключительным этапом. сухой щеткой на матрице и убедитесь, что она чистая.
После очистки можно попробовать сделать пробный снимок, чтобы убедиться, что процедура прошла успешно. Для этого закройте диафрагму на максимальное значение и сделайте снимок чистого белого листа, приведя объектив в состояние полной расфокусировки. Затем сравните качество снимков до и после.
Типы матриц фотоаппаратов: Виды матриц фотоаппарата и их отличия - ПЗС — тип матрицы камеры , что буквально означает устройство с зарядовой связью. В английской версии — Charge-Coupled Device. Очень известная аббревиатура, которая, впрочем, не так уж и распространена в наши дни. Многие используют устройства на основе светодиодов с высокой чувствительностью, на базе ПЗС-системы, но, несмотря на большую распространенность, этот тип микросхем все чаще вытесняется более современными.