О матрицах простым языком, Гл.3. ISO и Шумы
Шумы матрицы. Прежде чем перейти к шумам, давайте поговорим про чувствительность матрицы. Наверное вы помните как покупали фотопленку для вашего старого фотоаппарата, смотрели на значение светочувствительности на коробочке, так называемое ISO (тогда общедоступная пленка имела значение ISO от 100 до 400).
Высокая светочувствительность помогала нам снимать в более темных местах, в замен этого плюса мы получали некоторую зернистость на фото. Это и есть шум. Точно так же и обстоят дела с матрицами цифровых фотоаппаратов, которые имеют свою светочувствительность. Светочувствительность — это параметр показывающий, насколько чувствительна матрица к количеству попадающего на нее света. Да, скажете вы, видели мы там этот параметр ISO, который можно изменять. Отвечу вам, да изменять то можно, но светочувствительность у матрицы одна, а увеличение ISO это функция усиления сигнала получаемого от света, который упал на матрицу при съемке.
Слева фотографии сделанные компактной фотокамерой Olympus серии M (формат матрицы 1/2.3 »), справа фотографии сделанные бюджетной любительской зеркальной камерой Canon 450D (формат матрицы APS-C). Думаю вы сразу все поняли на этом примере.
При низкой чувствительности (до 400 едениц) фотографии с компакт камер имеющих маленькую матрицу практически «не шумят», но вот если ISO выставить больше 400, то шумы уже отчетливо видны. В отличие от фотокамер с большой матрицей, где шумы терпимы и на ISO 1600. На полноформатных матрицах шумы незаметны и на более высоких ISO.
В отличие от фотокамер с большой матрицей, где шумы терпимы и на ISO 1600. На полноформатных матрицах шумы незаметны и на более высоких ISO.
Так же шумы начинают вылазить при больших выдержках (длительное облучение матрицы светом (экспонирование) при съемке ночных сцен).
Следовательно, образно выражаясь, от матриц бОльшего размера будет меньше шума, чем от матриц меньшего размера, и кол-во мегапикселей здесь особой роли не играет.
Можно дать пару советов как уменьшить появление шумов, это:
- Без необходимости не снимать на высоких ISO
- Не снимать с большими выдержками
Но эти советы из ряда «Купив машину — не катайтесь на ней». Ведь если есть хороший кадр, но для его реализации надо принебречь этими советами, то смело принебрегайте и снимайте. Если кадр стоящий, а фотография «шумит», то можно попробовать их побороть, т.к. нынешние программные средства по борьбе с шумами ушли давольно далеко вверх. Но об этом мы поговорим. В разделе «Уроки по обработке фотографий»
В разделе «Уроки по обработке фотографий»
Светочувствительность фотоаппарата — какая лучше?
Светочувствительность фотоаппарата
Здравствуйте! Сегодня я с удовольствием поделюсь полезной информацией о такой важной функции фотокамеры, как ISO. Многие фотолюбители ошибочно недооценивают весь потенциал, этого параметра, а зря. Давайте разберемся, почему же так важно осознанно подбирать необходимую для каждой конкретной ситуации светочувствительность фотоаппарата и как это делать быстро.
1. Что такое ISO?
2. Какая светочувствительность лучше?
3. Почему появляется шум?
4. Когда нужно поднимать ISO?
5. Простые советы
Влияние параметра ISO на фото
Что такое ISO?
ISO — это светочувствительность матрицы к фотонам света. Чем выше устанавливаемое значение — тем чувствительность больше. Тут есть одно небольшое отличие от пленочных фотоаппаратов, где каждое значение ISO означает увеличение светочувствительности пленки в два раза.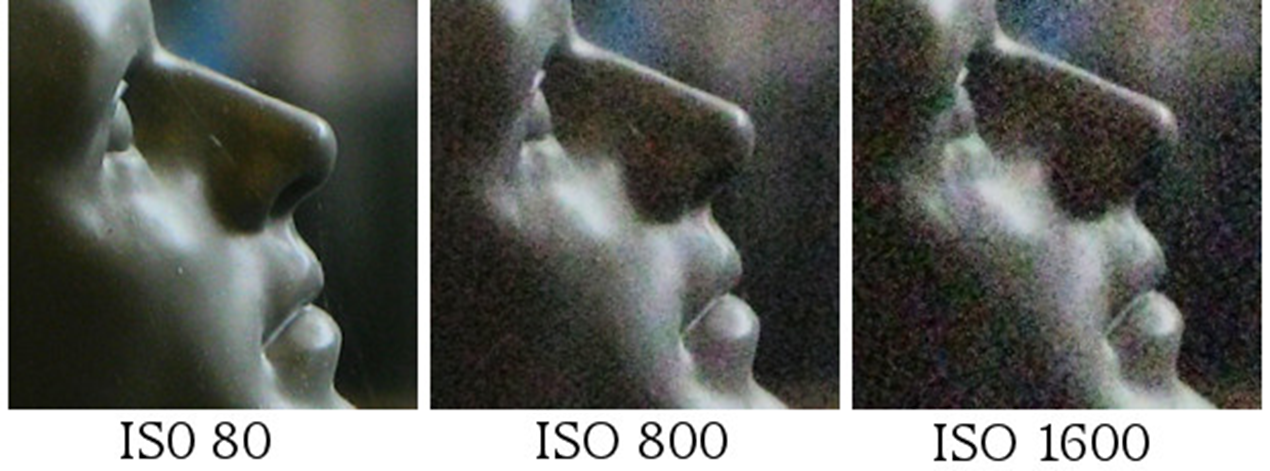 В современных цифровых «зеркалках» реализован гибкий подход, позволяющий изменять этот параметр еще более дробными шагами.
В современных цифровых «зеркалках» реализован гибкий подход, позволяющий изменять этот параметр еще более дробными шагами.
При выборе подходящего значения ISO есть один важный и одновременно парадоксальный момент. Всегда нужно стараться использовать наименьшие значения светочувствительности. Особенно, когда предполагается последующая обработка фотографий. Иначе повышается риск получения «шумных» снимков, аналогичных по виду с пленочной «зернистостью».
Понятно, что в творческой фотографии качественный снимок — не всегда значит хороший. Многие фотографы иногда даже добавляют искусственную зернистость и другие потертости при пост-обработке для усиления визуального эффекта. Но давайте поговорим пока о технических особенностях камеры, не вдаваясь в тонкости фотоискусства.
Какая светочувствительность лучше
В чем же заключается парадоксальность этого момента? Дело в том, что очень много зеркальных камер начинают свой отсчет от ISO 200 (например, до ISO 6400). Однако все камеры имеют цифровое повышение и понижение чувствительности. Таким образом, мы можем понизить этот параметр в некоторых камерах даже до ISO 50 и повысить до заоблачных ISO 128 000 и выше.
Однако все камеры имеют цифровое повышение и понижение чувствительности. Таким образом, мы можем понизить этот параметр в некоторых камерах даже до ISO 50 и повысить до заоблачных ISO 128 000 и выше.
Значение ISO 3200
По поводу увеличения, я думаю, все ясно и без лишних комментариев. Но мало кто знает, что цифровое уменьшение так же ухудшает качество картинки. Говоря простым фото-языком, в «тенях» и «светах» падает детализация. О том, какая светочувствительность лучше — трудно сказать, что-то определенное, кроме как посоветовать всегда стараться снимать на как можно более низком ISO.
Однако я рекомендую понижать ISO до 100 (при том, что камера рассчитана на значения от 200) только в тех ситуациях, когда снимаете, например, при очень ярком солнечном свете и хочется максимально открыть диафрагму. Или в случае применения длинной выдержки, например, снимая бурлящий ручей. Но о том, как использовать выдержку фотоаппарата на все 100% — в другой статье.
Почему появляется шум?
Если вы новичок в цифровой фотографии, вам наверняка интересно узнать, почему же появляются шумы и бывают ли они на
Матрица фотоаппарата
Начнем с того, что, при увеличении ISO, на матрицу фотоаппарата подается большее напряжение. Так как все фотоэлементы сенсора располагаются достаточно плотно, то возрастающие электромагнитные поля и повышающаяся температура на каждом пикселе оказывают большое влияние, создавая неизбежные помехи на соседних.
В профессиональных зеркальных фотоаппаратах это тоже случается, однако диапазон «рабочих» ISO гораздо шире. Для сравнения, снимки любительской камерой на ISO свыше 800 — это, можно сказать, брак. Полнокадровые камеры за счет бóльших размеров матрицы (примерно в 1,5 раза) позволяют снимать приемлемые по качеству фотографии вплоть до ISO 3200.
Когда нужно поднимать ISO?
Увеличение светочувствительности фотоаппарата позволяет снимать в более темных помещениях без использования вспышки. Теоретически, только лишь повышая или понижая значение ISO, можно использовать те же самые параметры выдержки и диафрагмы как на улице, так и в помещении. На практике, необходимо добиваться разумного компромисса, максимально используя все возможности камеры. Подробнее о настройках выдержки и диафрагмы рассказывается в отдельных статьях у меня на сайте.
Без вспышки, ISO 1250
При съемке со вспышкой в помещении часто возникает такая ситуация, что передний план освещен достаточно хорошо, а задний план, где света от фотовспышки не хватило, «провален». В данном случае лучше немного пожертвовать кристальной чистотой снимка в пользу его общей визуальной привлекательности.
Что мы делаем? Мы «поднимаем» светочувствительность матрицы до ISO 400-800 или даже выше.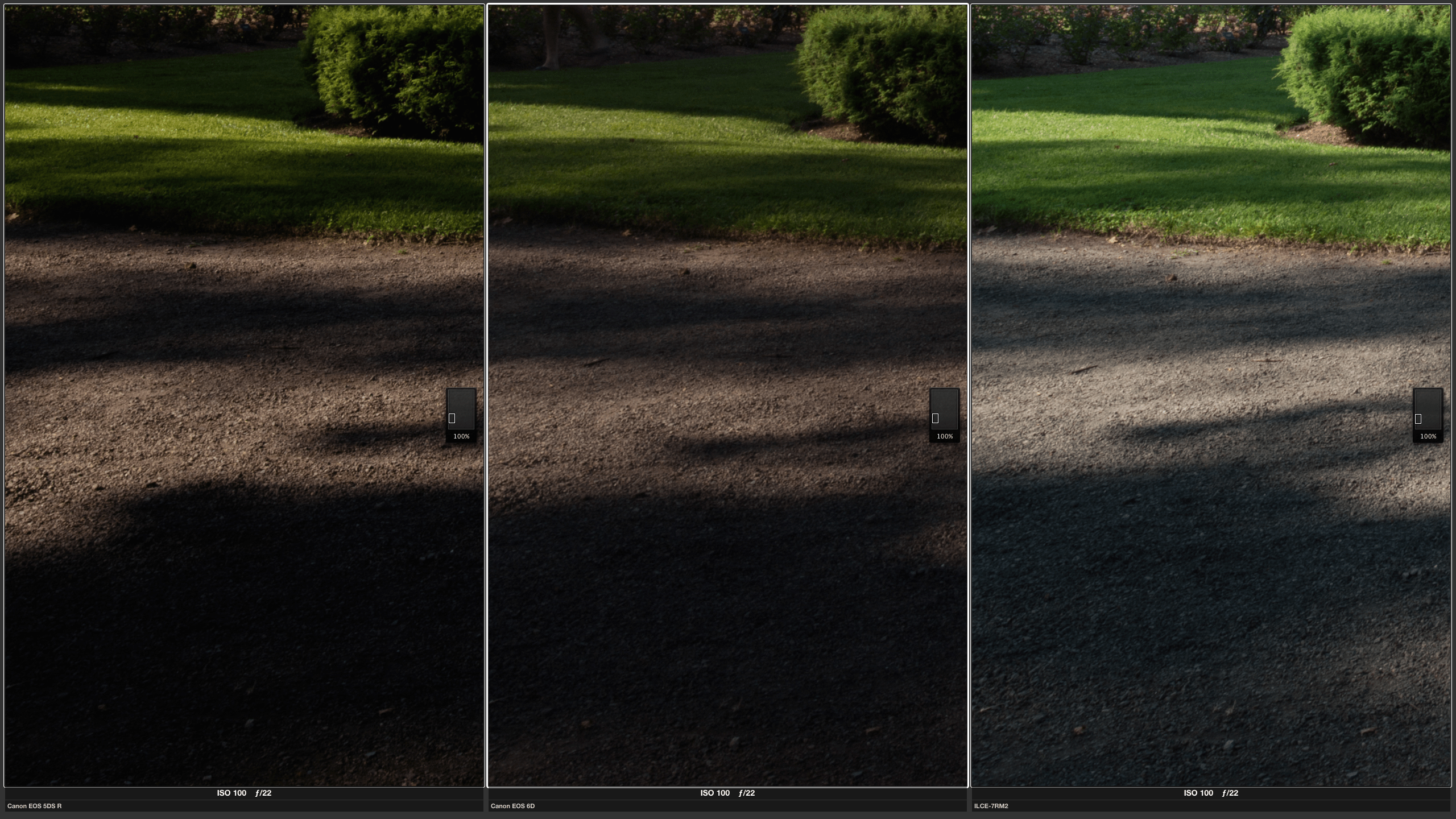 Параметры будут разными каждый раз и определяются опытным путем, или, как говорила моя учительница по физике, «методом научного тыка». Но не пугайтесь того, что задний план станет немного шумноват, это все же лучше недоэкспонированного варианта. Шум будет, но в приемлемых величинах.
Параметры будут разными каждый раз и определяются опытным путем, или, как говорила моя учительница по физике, «методом научного тыка». Но не пугайтесь того, что задний план станет немного шумноват, это все же лучше недоэкспонированного варианта. Шум будет, но в приемлемых величинах.
Простые советы
Определите для себя те самые приемлемые значения ISO, которые будут рабочими именно для вашего фотоаппарата.
Это скорее факт, с которым просто нужно смириться — наибольшее количество шума проявляется в теневых частях изображения.
Для чистки фотографий пользуйтесь плагинами для фотошопа
. Они дают лучший результат, чем встроенный «шумодав». Но избегайте чрезмерного «замыливания» — все хорошо в меру.Для разных целей могут быть допустимы совершенно различные значения ISO (например, фотографии для ч/б газеты или на разворот журнала будут иметь разные требования).
Снимая репортаж при сложном освещении и без вспышки, пользуйтесь функцией авто-ISO. В данном случае вы предварительно задаете диапазон от минимума до максимума, в котором будет работать функция. Я не призываю фотографировать полностью в режиме «авто», но иногда на настройки фотоаппарата просто нет времени.
В данном случае вы предварительно задаете диапазон от минимума до максимума, в котором будет работать функция. Я не призываю фотографировать полностью в режиме «авто», но иногда на настройки фотоаппарата просто нет времени.
Запомните, что качество фотографии — субъективное понятие. Для одного даже малейший шум будет являться браком, а другой сам добавляет зерно в фотошопе. Не гонитесь за идеальным качеством всегда и везде, ориентируйтесь на свой вкус, вырабатывающийся со временем, и набирайтесь опыта.
Тенденции в цифровой фотографии. Часть 3 (ПЗС-матрицы) / Фото и видео
Основные параметры ПЗС-матриц
В последние годы в околокомпьютерной (и не только) прессе довольно часто встречаются восторженные обзоры, посвящённые очередному «технологическому чуду, призванному революционным образом повлиять на будущее цифровой фотографии»— это обобщённый вариант фразы, в той или иной форме встречающейся в каждой из подобного рода статей. Но что характерно— спустя всего год первоначальный ажиотаж постепенно сходит на «нет», а большинство производителей цифровой фототехники вместо «передовой разработки» предпочитают использовать проверенные решения.
Рискну предположить, что причина такого развития событий довольно проста — достаточно обратить внимание на «гениальную простоту» того или иного решения. В самом деле, разрешения матрицы недостаточно? А давайте пикселы не столбцами и строками, а диагональными линиями располагать, а потом «повернём» программным путём «картинку» на 45 градусов— вот у нас разрешение сразу в два раза вырастет! Неважно, что таким образом повышается чёткость только строго вертикальных и горизонтальных линий, а наклонные и кривые (из которых и состоит реальное изображение) остаются без изменений. Главное, что эффект наблюдается, значит и громогласно заявить об этом можно.
К сожалению, современный пользователь «избалован мегапикселями». Ему невдомёк, что каждый раз при увеличении разрешения разработчикам «классических» ПЗС-матриц приходится решать сложнейшую задачу по обеспечению приемлемого динамического диапазона и чувствительности сенсора. А вот «решения» вроде перехода с прямоугольной на октагональную форму пикселов рядовому фотолюбителю кажутся вполне понятными и обоснованными— ведь об этом так доступно написано в рекламных буклетах…
Цель данной статьи — попытаться на самом простом уровне объяснить, от чего зависит качество изображения, получаемого на выходе с ПЗС-матрицы. При этом от качества оптики совершенно спокойно можно абстрагироваться— появление уже второй по счёту «зеркалки» стоимостью менее 1000 долларов (Nikon D 70) позволяет надеяться, что дальнейший рост разрешения сенсоров для камер приемлемой ценовой категории не будет ограничиваться «мыльничными» объективами.
При этом от качества оптики совершенно спокойно можно абстрагироваться— появление уже второй по счёту «зеркалки» стоимостью менее 1000 долларов (Nikon D 70) позволяет надеяться, что дальнейший рост разрешения сенсоров для камер приемлемой ценовой категории не будет ограничиваться «мыльничными» объективами.
Внутренний фотоэффект
Итак, сформированное объективом изображение попадает на ПЗС-матрицу, то есть лучи света падают на светочувствительную поверхность ПЗС-элементов, задача которых—преобразовать энергию фотонов в электрический заряд. Происходит это примерно следующим образом.
Для фотона, упавшего на ПЗС-элемент, есть три варианта развития событий— он либо «срикошетирует» от поверхности, либо будет поглощён в толще полупроводника (материала матрицы), либо «пробьёт насквозь» её «рабочую зону». Очевидно, что от разработчиков требуется создать такой сенсор, в котором потери от «рикошета» и «прострела навылет» были бы минимизированы. Те же фотоны, которые были поглощены матрицей, образуют пару электрон-дырка, если произошло взаимодействие с атомом кристаллической решётки полупроводника, или же только фотон (либо дырку), если взаимодействие было с атомами донорных либо акцепторных примесей, а оба перечисленных явления называются внутренним фотоэффектом. Разумеется, внутренним фотоэффектом работа сенсора не ограничивается— необходимо сохранить «отнятые» у полупроводника носители заряда в специальном хранилище, а затем их считать.
Разумеется, внутренним фотоэффектом работа сенсора не ограничивается— необходимо сохранить «отнятые» у полупроводника носители заряда в специальном хранилище, а затем их считать.
Элемент ПЗС-матрицы
В общем виде конструкция ПЗС-элемента выглядит так: кремниевая подложка p — типа оснащается каналами из полупроводника n -типа. Над каналами создаются электроды из поликристаллического кремния с изолирующей прослойкой из оксида кремния. После подачи на такой электрод электрического потенциала, в обеднённой зоне под каналом n -типа создаётся потенциальная яма , назначение которой— хранить электроны. Фотон, проникающий в кремний, приводит к генерации электрона, который притягивается потенциальной ямой и остаётся в ней. Большее количество фотонов (яркий свет) обеспечивает больший заряд ямы. Затем надо считать значение этого заряда, именуемого также фототоком, и усилить его.
Считывание фототоков ПЗС-элементов осуществляется так называемыми последовательными регистрами сдвига, которые преобразовывают строку зарядов на входе в серию импульсов на выходе.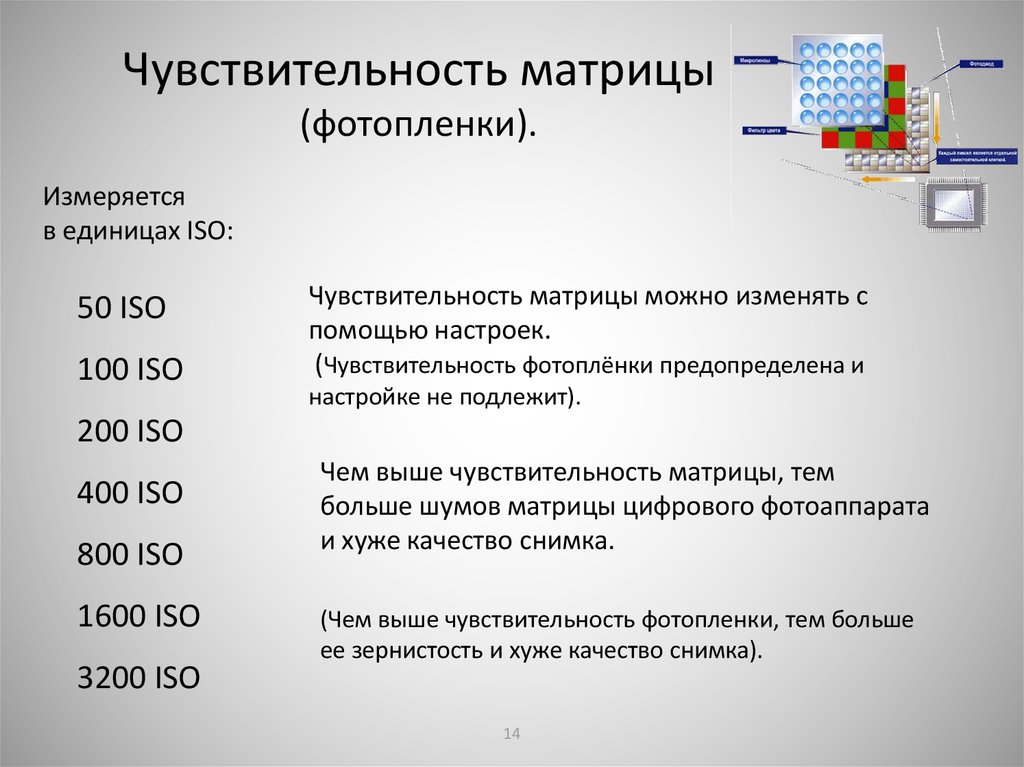 Данная серия представляет собой аналоговый сигнал, который в дальнейшем поступает на усилитель.
Данная серия представляет собой аналоговый сигнал, который в дальнейшем поступает на усилитель.
Таким образом, при помощи регистра можно преобразовать в аналоговый сигнал заряды строки из ПЗС-элементов. Фактически, последовательный регистр сдвига в ПЗС-матрицах реализуется с помощью тех же самых ПЗС-элементов, объединённых в строку. Работа такого устройства базируется на способности приборов с зарядовой связью (именно это обозначает аббревиатура ПЗС) обмениваться зарядами своих потенциальных ям. Обмен осуществляется благодаря наличию специальных электродов переноса (transfer gate), расположенных между соседними ПЗС-элементами. При подаче на ближайший электрод повышенного потенциала заряд «перетекает» под него из потенциальной ямы. Между ПЗС-элементами могут располагаться от двух до четырёх электродов переноса, от их количества зависит «фазность» регистра сдвига, который может называться двухфазным, трёхфазным либо четырёхфазным.
Подача потенциалов на электроды переноса синхронизирована таким образом, что перемещение зарядов потенциальных ям всех ПЗС-элементов регистра происходит одновременно. И за один цикл переноса ПЗС-элементы как бы «передают по цепочке» заряды слева направо (или же справа налево). Ну а оказавшийся «крайним» ПЗС-элемент отдаёт свой заряд устройству, расположенному на выходе регистра— то есть усилителю.
И за один цикл переноса ПЗС-элементы как бы «передают по цепочке» заряды слева направо (или же справа налево). Ну а оказавшийся «крайним» ПЗС-элемент отдаёт свой заряд устройству, расположенному на выходе регистра— то есть усилителю.
В целом, последовательный регистр сдвига является устройством с параллельным входом и последовательным выходом. Поэтому после считывания всех зарядов из регистра есть возможность подать на его вход новую строку, затем следующую и таким образом сформировать непрерывный аналоговый сигнал на основе двумерного массива фототоков. В свою очередь, входной параллельный поток для последовательного регистра сдвига (то есть строки двумерного массива фототоков) обеспечивается совокупностью вертикально ориентированных последовательных регистров сдвига, которая именуется параллельным регистром сдвига, а вся конструкция в целом как раз и является устройством, именуемым ПЗС-матрицей.
«Вертикальные» последовательные регистры сдвига, составляющие параллельный, называются столбцами ПЗС-матрицы, а их работа полностью синхронизирована. Двумерный массив фототоков ПЗС-матрицы одновременно смещается вниз на одну строку, причём происходит это только после того, как заряды предыдущей строки из расположенного «в самом низу» последовательного регистра сдвига ушли на усилитель. До освобождения последовательного регистра параллельный вынужден простаивать. Ну а сама ПЗС-матрица для нормальной работы обязательно должна быть подключена к микросхеме (или их набору), подающей потенциалы на электроды как последовательного, так и параллельного регистров сдвига, а также
синхронизирующей работу обоих регистров. Кроме того, нужен тактовый генератор.
Двумерный массив фототоков ПЗС-матрицы одновременно смещается вниз на одну строку, причём происходит это только после того, как заряды предыдущей строки из расположенного «в самом низу» последовательного регистра сдвига ушли на усилитель. До освобождения последовательного регистра параллельный вынужден простаивать. Ну а сама ПЗС-матрица для нормальной работы обязательно должна быть подключена к микросхеме (или их набору), подающей потенциалы на электроды как последовательного, так и параллельного регистров сдвига, а также
синхронизирующей работу обоих регистров. Кроме того, нужен тактовый генератор.
Полнокадровая матрица
Данный тип сенсора является наиболее простым с конструктивной точки зрения и именуется полнокадровой ПЗС-матрицей (full-frame CCD — matrix). Помимо микросхем «обвязки», такой тип матриц нуждается также в механическом затворе, перекрывающем световой поток после окончания экспонирования. До полного закрытия затвора считывание зарядов начинать нельзя— при рабочем цикле
параллельного регистра сдвига к фототоку каждого из его пикселов добавятся лишние электроны, вызванные попаданием фотонов на открытую поверхность ПЗС-матрицы. Данное явление называется «размазыванием»
заряда в полнокадровой матрице (full — frame matrix smear).
Данное явление называется «размазыванием»
заряда в полнокадровой матрице (full — frame matrix smear).
Таким образом, скорость считывания кадра в такой схеме ограничена скоростью работы как параллельного, так и последовательного регистров сдвига. Также очевидно, что необходимо перекрывать световой поток, идущий с объектива, до завершения процесса считывания, поэтому интервал между экспонированием тоже зависит от скорости считывания.
Существует усовершенствованный вариант полнокадровой матрицы, в котором заряды параллельного регистра не поступают построчно на вход последовательного, а «складируются» в буферном параллельном регистре. Данный регистр расположен под основным параллельным регистром сдвига, фототоки построчно перемещаются в буферный регистр и уже из него поступают на вход последовательного регистра сдвига. Поверхность буферного регистра покрыта непрозрачной (чаще металлической) панелью, а вся система получила название матрицы с буферизацией кадра (frame — transfer CCD).
Матрица с буферизацией кадра
В данной схеме потенциальные ямы основного параллельного регистра сдвига «опорожняются» заметно быстрее, так как при переносе строк в буфер нет необходимости для каждой строки ожидать полный цикл последовательного регистра. Поэтому интервал между экспонированием сокращается, правда при этом также падает скорость считывания— строке приходится «путешествовать» на вдвое большее расстояние. Таким образом, интервал между экспонированием сокращается только для двух кадров, хотя стоимость устройства за счёт буферного регистра заметно возрастает. Однако наиболее заметным недостатком матриц с буферизацией кадра является удлинившийся «маршрут» фототоков, который негативно сказывается на сохранности их величин. И в любом случае между кадрами должен срабатывать механический затвор, так что о непрерывном видеосигнале говорить не приходится.
Матрицы с буферизацией столбцов
Специально для видеотехники был разработан новый тип матриц, в котором интервал между экспонированием был минимизирован не для пары кадров, а для непрерывного потока. Разумеется, для обеспечения этой непрерывности пришлось предусмотреть отказ от механического затвора.
Разумеется, для обеспечения этой непрерывности пришлось предусмотреть отказ от механического затвора.
Фактически данная схема, получившая наименование матрицы с буферизацией столбцов (interline CCD -matrix), в чём-то сходна с системами с буферизацией кадра— в ней также используется буферный параллельный регистр сдвига, ПЗС-элементы которого скрыты под непрозрачным покрытием. Однако буфер этот не располагается единым блоком под основным параллельным регистром— его столбцы «перетасованы» между столбцами основного регистра. В результате рядом с каждым столбцом основного регистра находится столбец буфера, а сразу же после экспонирования фототоки перемещаются не «сверху вниз», а «слева направо» (или «справа налево») и всего за один рабочий цикл попадают в буферный регистр, целиком и полностью освобождая потенциальные ямы для следующего экспонирования.
Попавшие в буферный регистр заряды в обычном порядке считываются через последовательный регистр сдвига, то есть «сверху вниз». Поскольку сброс фототоков в буферный регистр происходит всего за один цикл, даже при отсутствии механического затвора не наблюдается ничего похожего на «размазывание» заряда в
полнокадровой матрице. А вот время экспонирования для каждого кадра в
большинстве случаев по продолжительности соответствует интервалу,
затрачиваемому на полное считывание буферного параллельного регистра. Благодаря
всему этому появляется возможность создать видеосигнал с высокой частотой
кадров— не менее 30кадров секунду.
Поскольку сброс фототоков в буферный регистр происходит всего за один цикл, даже при отсутствии механического затвора не наблюдается ничего похожего на «размазывание» заряда в
полнокадровой матрице. А вот время экспонирования для каждого кадра в
большинстве случаев по продолжительности соответствует интервалу,
затрачиваемому на полное считывание буферного параллельного регистра. Благодаря
всему этому появляется возможность создать видеосигнал с высокой частотой
кадров— не менее 30кадров секунду.
Матрица с буферизацией столбцов
Зачастую в отечественной литературе матрицы с буферизацией столбцов ошибочно именуют «чересстрочными». Вызвано это, наверное, тем, что английские наименования «interline » (буферизация строк) и «interlaced» (чересстрочная развёртка) звучат очень похоже. На деле же при считывании за один такт всех строк можно говорить о матрице с прогрессивной разверткой (progressive scan), а когда за первый такт считываются нечётные строки, а за второй— чётные (или наоборот), речь идёт о матрице с чересстрочной разверткой(interlace scan).
Хотя фототоки основного параллельного регистра сдвига сразу же попадают в буферный регистр, который не подвергается «фотонной бомбардировке», «размазывание» заряда в матрицах с буферизацией столбцов (smear) также происходит. Вызвано это частичным перетеканием электронов из потенциальной ямы «светочувствительного» ПЗС-элемента в потенциальную яму «буферного», особенно часто это происходит при близких к максимальному уровнях заряда, когда освещённость пикселя очень высока. В результате на снимке вверх и вниз от этой яркой точки протягивается светлая полоса, портящая кадр. Для борьбы с этим неприятным эффектом при проектировании сенсора «светочувствительный» и буферный столбцы располагают на большей дистанции друг от друга. Разумеется, это усложняет обмен зарядом, а также увеличивает временной интервал данной операции, однако вред, который наносит изображению «размазывание», не оставляет разработчикам выбора.
Как уже было сказано ранее, для обеспечения видеосигнала необходимо, чтобы сенсор не требовал перекрытия светового потока между экспозициями, так как механический затвор в таких условиях работы (около 30 срабатываний в секунду) может быстро выйти из строя. К счастью, благодаря буферным строкам есть возможность реализовать электронный затвор, который, во-первых, позволяет при необходимости обойтись без механического затвора, а во-вторых, обеспечивает сверхмалые (до 1/10000секунды) значения выдержки, особенно критичные для съемки быстротекущих процессов (спорт, природа ит.д.). Однако электронный затвор требует также, чтобы матрица обладала системой удаления избыточного заряда потенциальной ямы, впрочем, обо всём будет рассказано по порядку.
К счастью, благодаря буферным строкам есть возможность реализовать электронный затвор, который, во-первых, позволяет при необходимости обойтись без механического затвора, а во-вторых, обеспечивает сверхмалые (до 1/10000секунды) значения выдержки, особенно критичные для съемки быстротекущих процессов (спорт, природа ит.д.). Однако электронный затвор требует также, чтобы матрица обладала системой удаления избыточного заряда потенциальной ямы, впрочем, обо всём будет рассказано по порядку.
За всё приходится платить, и за возможность сформировать видеосигнал— тоже. Буферные регистры сдвига «съедают» значительную часть площади матрицы, в результате каждому пикселю достаётся лишь 30% светочувствительной области от его общей поверхности, в то время как у пикселя полнокадровой матрицы эта область составляет 70%. Именно поэтому в большинстве современных ПЗС_матриц поверх каждого пиксела
располагается микролинза. Такое простейшее оптическое устройство покрывает большую часть площади ПЗС-элемента и собирает всю падающую на эту часть долю фотонов в концентрированный световой поток, который, в свою очередь, направлен на довольно компактную светочувствительную область пиксела.
Микролинзы
Поскольку с помощью микролинз удаётся гораздо эффективнее регистрировать падающий на сенсор световой поток, со временем этими устройствами стали снабжать не только системы с буферизацией столбцов, но и полнокадровые матрицы. Впрочем, микролинзы тоже нельзя назвать «решением без недостатков».
Являясь оптическим устройством, микролинзы в той или иной мере искажают регистрируемое изображение чаще всего это выражается в потере чёткости у мельчайших деталей кадра— их края становятся слегка размытыми. С другой стороны, такое нерезкое изображение отнюдь не всегда нежелательно — в ряде случаев изображение, формируемое объективом, содержит линии, размер и частота размещения которых близки к габаритам ПЗС-элемента и межпиксельному расстоянию матрицы. В этом случае в кадре зачастую наблюдается ступенчатость (aliasing)— назначение пикселу определённого цвета, вне зависимости от того, закрыт ли он деталью изображения целиком или только его часть. В итоге линии объекта на снимке получаются рваными, с зубчатыми краями. Для решения этой проблемы в камерах с матрицами
без микролинз используется дорогостоящий фильтр защиты от наложения спектров (anti -aliasing filter), а сенсор с микролинзами в таком фильтре не нуждается. Впрочем, в любом случае за это приходится расплачиваться некоторым снижением разрешающей способности сенсора.
В итоге линии объекта на снимке получаются рваными, с зубчатыми краями. Для решения этой проблемы в камерах с матрицами
без микролинз используется дорогостоящий фильтр защиты от наложения спектров (anti -aliasing filter), а сенсор с микролинзами в таком фильтре не нуждается. Впрочем, в любом случае за это приходится расплачиваться некоторым снижением разрешающей способности сенсора.
Если объект съёмки освещён недостаточно хорошо, рекомендуется максимально открыть диафрагму. Однако при этом резко возрастает процент лучей, падающих на поверхность матрицы под крутым углом. Микролинзы же отсекают значительную долю таких лучей, поэтому эффективность поглощения света матрицей (то, ради чего и открывали диафрагму) сильно сокращается. Хотя надо отметить, что падающие под крутым углом лучи тоже являются источником проблем— входя в кремний одного пиксела, фотон с большой длиной волны, обладающий высокой проникающей способностью, может поглотиться материалом другого элемента матрицы, что в итоге приведёт к искажению изображения. Для решения этой проблемы поверхность матрицы покрывается непрозрачной (например, металлической) «решёткой», в вырезах которой остаются только светочувствительные зоны пикселов.
Для решения этой проблемы поверхность матрицы покрывается непрозрачной (например, металлической) «решёткой», в вырезах которой остаются только светочувствительные зоны пикселов.
Исторически сложилось так, что полнокадровые сенсоры применяются в основном в студийной технике, а матрицы с буферизацией столбцов— в любительской. В профессиональных камерах встречаются сенсоры обоих типов.
В классической схеме ПЗС-элемента, при которой используются электроды из поликристаллического кремния, чувствительность ограничена по причине частичного рассеивания света поверхностью электрода. Поэтому при съёмке в особых условиях, требующих повышенной чувствительности в синей и ультрафиолетовой областях спектра, применяются матрицы с обратной засветкой (back -illuminated matrix). В сенсорах такого типа регистрируемый свет падает на подложку, а чтобы обеспечить требуемый внутренний фотоэффект подложка шлифовалась до толщины 10–15 микрометров. Данная стадия обработки сильно удорожала стоимость матрицы, кроме того, устройства получались очень хрупкими и требовали повышенной осторожности при сборке и эксплуатации.
Матрица с обратной засветкой
Очевидно, что при использовании светофильтров, ослабляющих световой поток, все дорогостоящие операции по увеличению чувствительности теряют смысл, поэтому матрицы с обратной засветкой применяются по большей части в астрономической фотографии.
Чувствительность
Одной из важнейших характеристик регистрирующего устройства, будь то фотоплёнка или ПЗС-матрица, является чувствительность — способность определенным образом реагировать на оптическое излучение. Чем выше чувствительность, тем меньшее количество света требуется для реакции регистрирующего устройства. Для обозначения чувствительности применялись различные величины (DIN ,ASA), однако в конечном итоге прижилась практика обозначать этот параметр в единицах ISO (International Standards Organization— Международная организация стандартов).
Для отдельного ПЗС-элемента под реакцией на свет следует понимать генерацию заряда.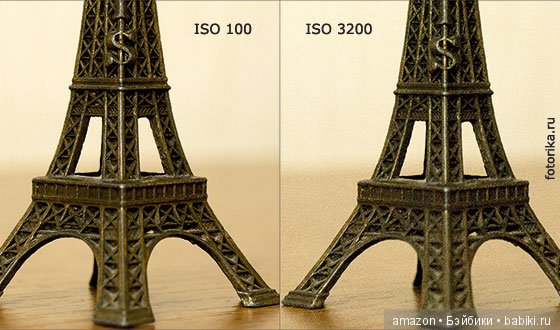 Очевидно, что чувствительность ПЗС-матрицы складывается из чувствительности всех её пикселов и в целом зависит от двух параметров.
Очевидно, что чувствительность ПЗС-матрицы складывается из чувствительности всех её пикселов и в целом зависит от двух параметров.
Первый параметр — интегральная чувствительность, представляющий собой отношение величины фототока (в миллиамперах) к световому потоку (в люменах) от источника излучения, спектральный состав которого соответствует вольфрамовой лампе накаливания. Этот параметр позволяет оценить чувствительность сенсора в целом.
Второй параметр — монохроматическая чувствительность, то есть отношение величины фототока (в миллиамперах) к величине световой энергии излучения (в миллиэлектронвольтах), соответствующей определённой длине волны. Набор всех значений монохроматической чувствительности для интересующей части
спектра составляет спектральную чувствительность — зависимость чувствительности от длины волны света. Таким образом, спектральная чувствительность показывает возможности сенсора по регистрации оттенков определённого цвета.
Понятно, что единицы измерения как интегральной, так и монохромной чувствительности отличаются от популярных в фототехнике обозначений. Именно поэтому производители цифровой фототехники в характеристиках изделия указывают эквивалентную чувствительность ПЗС-матрицы в единицах ISO. А для того, чтобы определить эквивалентную чувствительность, производителю достаточно знать освещённость объекта съёмки, диафрагму и выдержку, и использовать пару формул. Согласно первой, экспозиционное число вычисляется как log 2(L *S /C), где L — освещённость, S — чувствительность, а C — экспонометрическая константа. Вторая формула определяет экспозиционное число равным 2*log 2K — log 2t ., где K — диафрагменное число, а t —выдержка. Нетрудно вывести формулу, позволяющую при известных L , C , K и t вычислить, чему равняется S .
Чувствительность матрицы является интегральной величиной, зависящей от чувствительности каждого ПЗС-элемента. Ну а чувствительность пиксела матрицы зависит, во-первых, от «подставленной под дождь фотонов» площади светочувствительной области (fill factor), а во-вторых, от квантовой эффективности (quantum efficiency), то есть отношения числа зарегистрированных электронов к числу
упавших на поверхность сенсора фотонов.
Ну а чувствительность пиксела матрицы зависит, во-первых, от «подставленной под дождь фотонов» площади светочувствительной области (fill factor), а во-вторых, от квантовой эффективности (quantum efficiency), то есть отношения числа зарегистрированных электронов к числу
упавших на поверхность сенсора фотонов.
В свою очередь, на квантовую эффективность влияет ряд других параметров. Во-первых, это коэффициент отражения — величина, отображающую долю тех фотонов, которые «отрикошетируют» от поверхности сенсора. При возрастании коэффициента отражения доля фотонов, участвующих во внутреннем фотоэффекте, уменьшается.
Не отражённые от поверхности сенсора фотоны поглотятся, образуя носители заряда, однако часть из них «застрянет» у поверхности, а часть проникнет слишком глубоко в материал ПЗС-элемента. Очевидно, что в обоих случаях они не примут никакого участия в процессе формирования фототока. «Проникающая способность» фотонов в полупроводник, именуемая коэффициентом поглощения, зависит как от материала полупроводника, так и от длины волны падающего света — «длинноволновые» частицы проникают гораздо глубже «коротковолновых»..jpg) Разрабатывая ПЗС-элемент, необходимо для фотонов с длиной волны, соответствующей видимому излучению, добиться такого коэффициента поглощения, чтобы внутренний фотоэффект происходил вблизи потенциальной ямы, повышая тем самым шанс для электрона попасть в неё.
Разрабатывая ПЗС-элемент, необходимо для фотонов с длиной волны, соответствующей видимому излучению, добиться такого коэффициента поглощения, чтобы внутренний фотоэффект происходил вблизи потенциальной ямы, повышая тем самым шанс для электрона попасть в неё.
Нередко вместо квантовой эффективности используют термин «квантовый выход» (quantum yield), но в действительности данный параметр отображает количество носителей заряда, высвобождаемых при поглощении одного фотона. Разумеется, при внутреннем фотоэффекте основная масса носителей заряда всё же попадает в потенциальную яму ПЗС-элемента, однако определённая часть электронов (или дырок) избегает «ловушки». В числителе формулы, описывающей квантовую эффективность, оказывается именно то количество носителей заряда, которое попало в потенциальную яму.
Важной характеристикой ПЗС-матрицы является порог чувствительности — параметр регистрирующего свет устройства, характеризующий минимальную величину светового сигнала, который может быть зарегистрирован. Чем меньше этот сигнал, тем выше порог чувствительности. Главным фактором, ограничивающим порог чувствительности, является темновой ток (dark current). Он является следствием термоэлектронной эмиссии и возникает в ПЗС-элементе при подаче потенциала на электрод, под которым формируется потенциальная яма. «Темновым» же данный ток называется потому, что складывается из электронов, попавших в яму при полном отсутствии светового потока. Если световой поток слаб, то величина фототока близка, а порой и меньше, чем величина темнового тока.
Чем меньше этот сигнал, тем выше порог чувствительности. Главным фактором, ограничивающим порог чувствительности, является темновой ток (dark current). Он является следствием термоэлектронной эмиссии и возникает в ПЗС-элементе при подаче потенциала на электрод, под которым формируется потенциальная яма. «Темновым» же данный ток называется потому, что складывается из электронов, попавших в яму при полном отсутствии светового потока. Если световой поток слаб, то величина фототока близка, а порой и меньше, чем величина темнового тока.
Существует зависимость темнового тока от температуры сенсора— при нагревании матрицы на 9 градусов по Цельсию её темновой ток возрастает в два раза. Для охлаждения матрицы используются различные системы теплоотвода (охлаждения). В полевых камерах, массогабаритные характеристики которых сильно ограничивают применение систем охлаждения, иногда в качестве теплообменника используется металлический корпус камеры. В студийной технике ограничений по массе и габаритам практически нет, более того, допускается достаточно высокое энергопотребление охлаждающей системы, которые, в свою очередь, делятся на пассивные и активные.
Пассивные системы охлаждения обеспечивают лишь «сброс» избыточного тепла охлаждаемого устройства в атмосферу. При этом система охлаждения играет роль максимум проводника тепла, обеспечивающего более эффективное его рассеивание. Очевидно, что температура охлаждаемого устройства не может стать ниже, чем температура окружающего воздуха, в чём и заключается основной недостаток пассивных систем.
Простейшим примером системы пассивного теплообмена является радиатор (heatsink), изготавливаемый из материала с хорошей теплопроводностью, чаще всего— из металла. Поверхность, контактирующая с атмосферой, имеет форму, обеспечивающую как можно большую площадь рассеивания. Общепризнанно максимальной площадью рассеивания обладают игольчатые радиаторы, по форме напоминающие «ежа», утыканного рассеивающими тепло «иголками». Нередко для форсирования теплообмена поверхность радиатора обдувается микровентилятором— похожие устройства, называемые кулерами (cooler, от слова cool— охлаждать), в персональных компьютерах охлаждают процессор. На основании того, что микровентилятор потребляет электроэнергию, использующие его системы называются «активными»., что совершенно неправильно, так как кулеры не могут охладить устройство до температуры меньшей, чем атмосферная. При высокой температуре окружающего воздуха (40градусов и выше) эффективность пассивных систем охлаждения начинает падать.
На основании того, что микровентилятор потребляет электроэнергию, использующие его системы называются «активными»., что совершенно неправильно, так как кулеры не могут охладить устройство до температуры меньшей, чем атмосферная. При высокой температуре окружающего воздуха (40градусов и выше) эффективность пассивных систем охлаждения начинает падать.
Активные системы охлаждения за счет электрических либо химических процессов обеспечивают устройству температуру ниже окружающего воздуха. Фактически, активные системы «вырабатывают холод», правда, при этом в атмосферу выделяется как тепло охлаждаемого устройства, так и тепло системы охлаждения. Классическим примером активного охладителя является обычный холодильник. Впрочем, несмотря на довольно высокий КПД, его массогабаритные характеристики неприемлемы даже для студийной фототехники. Поэтому ее активное охлаждение обеспечивается системами Пельтье , работа которых основана на использовании одноименного эффекта, когда при наличии разности потенциалов на концах двух проводников, изготовленных из разных материалов, на стыке этих проводников (в зависимости от полярности напряжения) будет выделяться, либо поглощаться тепловая энергия. Причиной тому ускорение либо замедление электронов за счет внутренней контактной разности потенциалов стыка проводников.
Причиной тому ускорение либо замедление электронов за счет внутренней контактной разности потенциалов стыка проводников.
При использовании комбинации полупроводников n-типа и p-типа, в которых теплопоглощение производится за счет взаимодействия электронов и «дырок», возникает максимальный теплопроводный эффект. Для его усиления можно применить каскадное объединение элементов Пельтье, причём, поскольку происходит как поглощение тепла, так и выделение, элементы необходимо комбинировать так, чтобы одна сторона охладителя была «горячей», а другая— «холодной». В результате каскадного комбинирования температура «горячей» стороны наиболее удалённого от матрицы элемента Пельтье значительно выше, чем у окружающего воздуха, а его тепло рассеивается в атмосфере при помощи пассивных устройств, то есть радиаторов и кулеров.
Использующие эффект Пельтье активные системы охлаждения могут понизить температуру сенсора вплоть до нуля градусов, кардинально снижая уровень темнового тока. Однако чрезмерное охлаждение ПЗС-матрицы грозит выпадением конденсата влаги из окружающего воздуха и коротким замыканием электроники. А в ряде случаев предельная разность температур между охлаждаемой и светочувствительной плоскостями матрицы может привести к её недопустимой деформации.
Однако чрезмерное охлаждение ПЗС-матрицы грозит выпадением конденсата влаги из окружающего воздуха и коротким замыканием электроники. А в ряде случаев предельная разность температур между охлаждаемой и светочувствительной плоскостями матрицы может привести к её недопустимой деформации.
Однако ни радиаторы, ни кулеры, ни элементы Пельтье не применимы к полевым камерам, ограниченным по весу и габаритам. Вместо этого для такой техники используется метод, основанный на так называемых черных пикселах (dark reference pixels).Эти пикселы представляют собой покрытые непрозрачным
материалом столбцы и строки по краям матрицы. Усредненное значение для всех фототоков черных пикселов считается уровнем темнового тока. Очевидно, что при разных условиях эксплуатации (температура окружающей среды и самой камеры, ток аккумуляторов и т. д.), уровень темнового тока будет разным. При использовании его в качестве «точки отсчёта» для каждого пиксела, то есть вычитая его значение из фототока, можно определить, какой именно заряд создан упавшими на ПЗС-элемент фотонами.
Подавляя тем или иным способом темновой ток, следует помнить о другом факторе, ограничивающем порог чувствительности. Им является тепловой шум (thermal noise), создаваемый даже при отсутствии потенциала на электродах одним лишь хаотичным движением электронов по ПЗС-элементу. Выдержки большой длительности ведут к постепенному накапливанию блуждающих электронов в потенциальной яме, что искажает истинное значение фототока. И чем «длиннее» выдержка, тем больше «заблудившихся» в яме электронов.
Технология производства ПЗС-матриц обладает рядом особенностей. В частности, практически в каждом ПЗС-элементе уровни как темнового тока, так и теплового шума не такие, как в соседних пикселах. Поэт
Фиксация изображения в цифровой фотокамере
Главное отличие пленочного фотоаппарата от цифрового заключается в способе фиксации света, прошедшего через объектив. Там, где в традиционных пленочных фотоаппаратах располагается пленка, у цифровой камеры находится электронная матрица со светочувствительными элементами. Именно на поверхности электронно-оптического преобразователя (матрицы) создается изображение, которое затем превращается в электрические сигналы, обрабатываемые процессором камеры. От матрицы цифрового фотоаппарата напрямую зависит не только качество получаемых фотографий, но и стоимость самой камеры. Что же собой представляет светочувствительная матрица и каким образом создается цветное изображение в цифровом фотоаппарате?
Именно на поверхности электронно-оптического преобразователя (матрицы) создается изображение, которое затем превращается в электрические сигналы, обрабатываемые процессором камеры. От матрицы цифрового фотоаппарата напрямую зависит не только качество получаемых фотографий, но и стоимость самой камеры. Что же собой представляет светочувствительная матрица и каким образом создается цветное изображение в цифровом фотоаппарате?
Матрица: типы и принцип работы
Светочувствительная матрица является ключевым элементом любой современной цифровой камеры. Ее можно назвать «сердцем» цифрового фотоаппарата. Если же сравнивать камеру с человеческим глазом, то матрица – это сетчатка цифрового аппарата, на которой оптический сигнал преобразуется в цифровое изображение. Матрица или сенсор представляет собой сложно структурированную пластинку из полупроводникового материала. На этой микросхеме имеется упорядоченный массив светочувствительных элементов. Миллионы таких светочувствительных элементов или пикселов изолированы друг от друга и формируют только одну точку изображения. Нужно отметить, что, несмотря на высокую точность в изготовлении матриц цифровых фотоаппаратов, каждый сенсор по своему уникален и потому двух совершенно одинаковых камер по своему характеру не существует.
Нужно отметить, что, несмотря на высокую точность в изготовлении матриц цифровых фотоаппаратов, каждый сенсор по своему уникален и потому двух совершенно одинаковых камер по своему характеру не существует.
Основная задача матрицы фотоаппарата заключается в том, чтобы обеспечить преобразование оптического изображения в электрическое. При спуске затвора фотоаппарата на миллионы крошечных ячеек попадает свет, на них накапливается заряд, который, естественно, разнится в зависимости от количества света, попавшего на данную ячейку матрицы. Эти заряды передаются на электрическую схему, которая призвана усилить их и преобразовать в цифровой вид. Усиление сигнала выполняется в соответствии с настройками чувствительности ISO, выбираемых камерой автоматически или самостоятельно устанавливаемых пользователем. Чем больше выбираемая чувствительность ISO отличается от реальной светочувствительности матрицы, тем сильнее сигнал. Но усиление сигнала может негативно сказаться на итоговом изображении – появляется так называемый «шум» в виде случайных помех.
На сегодняшний день при производстве светочувствительных матриц для цифровых фотоаппаратов используются, главным образом, две технологии – CMOS (Complementary Metal Oxide Semiconductor) и CCD (Charge Coupled Device). В русском переводе эти два типа сенсоров известны как КМОП и ПЗС-матрицы.
КМОП-матрицы изготавливаются из комплементарных металлооксидных полупроводниковых материалов. Их ключевая особенность состоит в том, что они умеют считывать и усиливать световой сигнал с любой точки своей поверхности. КМОП-матрица может преобразовывать заряд в напряжение сразу в пикселе. Эта особенность позволяет значительно повысить скорость работы фотоаппарата при обработке информации с матрицы.
Кроме того, подобная технология дает возможность интегрировать матрицы непосредственно с аналогово-цифровым преобразователем (АЦП), что обеспечивает удешевление цифрового фотоаппарата за счет некоторого упрощения его конструкции. Плюс ко всему, КМОП-матрицы отличаются более низким энергопотреблением. Однако у них есть существенный недостаток – для того, чтобы повысить светочувствительность матрицы и улучшить, тем самым, качество изображения производителям приходится существенно увеличивать физические размеры сенсора.
Однако у них есть существенный недостаток – для того, чтобы повысить светочувствительность матрицы и улучшить, тем самым, качество изображения производителям приходится существенно увеличивать физические размеры сенсора.
ПЗС-матрицы получили большое распространение в современных цифровых фотоаппаратах любительского и профессионального уровня даже несмотря на то, что они отличаются чуть большей трудоемкостью в производстве. Принцип работы такой матрицы основывается на построчном перемещении накопленных электрических зарядов. В процессе считывания заряда осуществляется перенос зарядов к краю матрицы и в сторону усилителя, который далее передает усиленный сигнал в аналогово-цифровой преобразователь (АЦП). Поскольку информация из ячеек считывается последовательно, то сделать следующий снимок можно только после того, как предыдущее изображение сформировано целиком. В то же время преимуществом ПЗС-матриц являются их сравнительно небольшие размеры.
ПЗС-матрицы, используемые в современных цифровых фотоаппаратах, по своей конструкции делятся на полнокадровые, с буферизацией кадра, буферизацией столбцов, с прогрессивной разверткой, чересстрочной разверткой и с обратной засветкой. Например, в чересстрочных ПЗС каждый пиксель обладает как приемником света, так и областью для накапливания заряда. В свою очередь, в полнокадровых матрицах весь пиксель выполняет функцию приема светового потока, а каналы передачи заряда спрятаны под пиксель.
Например, в чересстрочных ПЗС каждый пиксель обладает как приемником света, так и областью для накапливания заряда. В свою очередь, в полнокадровых матрицах весь пиксель выполняет функцию приема светового потока, а каналы передачи заряда спрятаны под пиксель.
Довольно долгое время считалось, что ПЗС-матрицы обладают большей светочувствительностью, более широким динамическим диапазоном и лучшей устойчивостью к шумам, по сравнению с КМОП-сенсорами. Поэтому цифровые фотоаппараты с ПЗС-матрицами использовались там, где требуется обеспечить высокое качество изображения, а камерам с КМОМ-сенсорами отводилась роль недорогих любительских устройств. Однако за последние годы производителям вследствие улучшения качества кремниевых пластин и схемы усилителя удалось существенно повысить характеристики КМОП-матриц. И теперь по качеству изображения камеры на основе КМОП-матриц практически ни в чем не уступают фотоаппаратам, в которых используются ПЗС-сенсоры.
Новейшие КМОП-сенсоры способны гарантировать профессиональное качество снимков. А потому с точки зрения качества фотоизображения, собственно, тип матрицы уже мало о чем говорит, гораздо более важным фактором являются конкретные характеристики данного сенсора — его физические размеры, разрешающая способность, светочувствительность, соотношение сигнал — шум.
Как мы уже выяснили, матрица цифрового фотоаппарата состоит из огромного количества светочувствительных полупроводниковых элементов прямоугольной формы, называемых пикселями. Каждый такой пиксель собирает электроны, возникающие в нем под действием фотонов, пришедших от источника света. Но как же происходит процесс формирования изображения матрицей фотоаппарата?
В упрощенном виде об этом можно рассказать на примере ПЗС-матрицы. Во время экспозиции кадра, регулируемой с помощью затвора фотоаппарата, каждый пиксель постепенно заполняется электронами пропорционально тому количеству света, которое попало на него. Далее затвор фотоаппарата закрывается, и столбцы с накопленными в пикселях электронами начинают сдвигаться к краю сенсора, где размещается аналогичный измерительный столбец.
В этом столбце заряды сдвигаются уже в перпендикулярном направлении и, в конечном счете, попадают на измерительный элемент. В нем создаются микротоки, пропорциональныепопавшим на него зарядам. Благодаря такой схеме становится возможным определить не только значение накопленного заряда, но и какому пикселю на матрице, то есть номер строки и номер столбца, он соответствует. На основе этого строится картинка, соответствующая сфокусированному на поверхности светочувствительной матрицы изображению. В матрицах, построенных по технологии КМОП, заряд преобразуется в напряжение прямо в пикселе, после чего он может быть считан электрической схемой фотоаппарата.
Формирование цветного изображения
Сенсоры цифровых фотоаппаратов способны реагировать только на силу попадающего на них света. То есть они могут определять исключительно градации интенсивности света — от полностью белого до полностью черного. Чем больше фотонов попало на пиксель, тем, соответственно, выше яркость света. Но как в таком случае цифровой фотоаппарат распознает цветовые оттенки? В традиционных пленочных фотокамерах используется негативная пленка, состоящая из трех слоев, которые позволяет пленке сохранять различные цветовые оттенки света. В цифровых же камерах реализуются иные технические решения для формирования цветного изображения.
Но как в таком случае цифровой фотоаппарат распознает цветовые оттенки? В традиционных пленочных фотокамерах используется негативная пленка, состоящая из трех слоев, которые позволяет пленке сохранять различные цветовые оттенки света. В цифровых же камерах реализуются иные технические решения для формирования цветного изображения.
Для того, чтобы сенсор цифрового фотоаппарата мог различать цветовые оттенки, над его поверхностью устанавливают блок микроскопических светофильтров. Если в матрице используются микролинзы, служащие для дополнительной фокусировки света на пикселях с целью повышения их чувствительности, то фильтры размещаются между каждой микролинзой и ячейкой.
Как хорошо известно, любой цвет в спектре можно получить путем смешения всего нескольких основных цветов (красного, зеленого и синего). Распределение светофильтров по поверхности сенсора для формирования цветного изображения может быть разным, в зависимости от выбранного алгоритма. В большинстве цифровых фотоаппаратов сегодня применяется цветовая модель Байера (Bayerpattern).
В рамках этой системы цветовые фильтры над поверхностью матрицы располагаются вперемежку между собой, в шахматном порядке. Причем количество зеленых фильтров в два раза больше, чем красных или синих, поскольку человеческий глаз более чувствителен к зеленой части светового спектра. В результате, получается так, что красные и синие фильтры располагаются между зелеными. Шахматный порядок в расположении фильтров необходим для того, чтобы одинаковые по цвету изображения получались вне зависимости от того, как пользователь держит фотокамеру – вертикально или горизонтально.
Цветовая модель Байера (ист. www.figurative.ru)Таким образом, цвет каждого пикселя определяется прикрывающим его светофильтром. В получении информации о цвете участвуют все экспонированные элементы ячейки. Само же цветное изображение строится электроникой камеры уже после того, как снимаемый с ячеек сенсора камеры электрический сигнал преобразуется в цифровой код аналого-цифровым преобразователем (АЦП). Впрочем, КМОП-сенсоры могут и самостоятельно обрабатывать цветовую составляющую сигнала.
Аналого-цифровой преобразователь (АЦП)
Как мы уже поняли, работа светочувствительной матрицы тесно связана с аналого-цифровым преобразователем камеры (АЦП). После того, как каждый из миллиона светочувствительных элементов матрицы преобразует энергию падающего на него света в электрический заряд, этот накопленный заряд усиливается до необходимого уровня для последующей его обработки аналого-цифровым преобразователем.
Аналогово-цифровой преобразователь – это устройство, отвечающее за преобразование входного аналогового сигнала в цифровой сигнал. АЦП переводит аналоговые величины полученного каждым светочувствительным элементом электрического заряда в цифровые величины, которые далее автоматика камеры, в частности, встроенный микропроцессор, получает уже в двоичном коде.
Главной характеристикой АЦП является его разрядность, то есть количество дискретных уровней сигнала, которые кодируются преобразователем. К примеру, одноразрядный аналогово-цифровой преобразователь может классифицировать сигналы светочувствительных датчиков только как черные (0) или белые (1). А восьмиразрядный АЦП способен построить уже 256 различных значений яркости для каждого датчика. В современных моделях цифровых фотоаппаратов с сенсорами большого размера используются 12-, 14- либо 16-разрядные аналого-цифровые преобразователи. Высокая разрядность установленного в камере АЦП может свидетельствовать о том, что данный цифровой фотоаппарат способен создавать изображения с широким тональным и динамическим диапазонами.
А восьмиразрядный АЦП способен построить уже 256 различных значений яркости для каждого датчика. В современных моделях цифровых фотоаппаратов с сенсорами большого размера используются 12-, 14- либо 16-разрядные аналого-цифровые преобразователи. Высокая разрядность установленного в камере АЦП может свидетельствовать о том, что данный цифровой фотоаппарат способен создавать изображения с широким тональным и динамическим диапазонами.
После того, как АЦП выполнит преобразование аналоговых напряжений, полученных с датчиков, в двоичную кодированную метку, состоящую из нулей и единиц, он передает эти оцифрованные данные нацифровой процессор сигналов камеры. В процессоре эти данные уже преобразуются в цветную картинку в соответствии с внесенными производителем алгоритмами, включающими в себя, в частности, определение координат точек изображения и присвоения им определенного цветового оттенка. При построении цветового изображения встроенная электроника камеры обеспечивает регулировку яркости, контрастности и насыщенности картинки.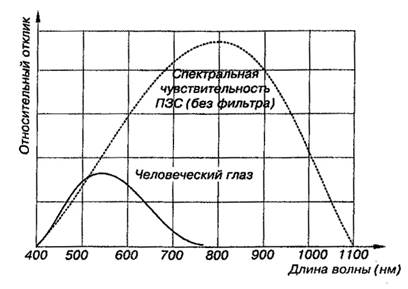 Также она убирает с него различные помехи и «шумы».
Также она убирает с него различные помехи и «шумы».
Безусловно, сенсор и связанный с ним аналого-цифровой преобразователь – это не единственные составляющие цифровой камеры, которые определяют ее качество. Оптика, электроника и другие элементы также очень важны для обеспечения высокого качества создаваемых фотоизображений. Тем не менее, уровень современного цифрового фотоаппарата принято определять именно исходя из технического совершенства установленной в нем светочувствительной матрицы. Более того, развитие фототехники в целом сегодня во многом определяется скоростью разработки все более совершенных сенсоров.
Источник: Фотокомок.ру – тесты и обзоры фотоаппаратов (при цитировании или копировании активная ссылка обязательна)
Основы: матрицы фотоаппаратов
Наш адрес в интернете: www.my-sony.ru
Страница из архиваПЗС матрица (прибор с зарядовой связью — перевод английского термина CCD) или сенсор — интегральная микросхема, цифровое запоминающее устройство, сохраняющее изображение в цифровой фотокамере. Объем ПЗС матрицы измеряется в мегапикселах, физические размеры — в дюймах. Физический размер матрицы и её разрешение определяют размер пикселя. В фотоаппаратах ПЗС матрица предназначена для преобразования спроецированного на неё оптического изображения в аналоговый электрический сигнал или в поток цифровых данных. Сенсор состоит из массива светочувствительных ячеек, каждая из которых действует аналогично фотоэкспонометру, вырабатывая электрический сигнал, пропорциональный интенсивности попадающего на нее светового потока.
Объем ПЗС матрицы измеряется в мегапикселах, физические размеры — в дюймах. Физический размер матрицы и её разрешение определяют размер пикселя. В фотоаппаратах ПЗС матрица предназначена для преобразования спроецированного на неё оптического изображения в аналоговый электрический сигнал или в поток цифровых данных. Сенсор состоит из массива светочувствительных ячеек, каждая из которых действует аналогично фотоэкспонометру, вырабатывая электрический сигнал, пропорциональный интенсивности попадающего на нее светового потока.
Характеристиками сенсоров являются светочувствительность, отношение сигнал-шум и физический размер пикселя однозначно взаимосвязаны (для матриц, созданных по одной и той же технологии). Чем больше физический размер пикселя, тем больше получаемое соотношение сигнал-шум при заданной чувствительности, или тем выше чувствительность при заданном сотношении сигнал-шум. Физический размер матрицы и её разрешение однозначно определяют размер пикселя.
Для создания цифровой фотографии используется электрический заряд, вырабатываемый в тот момент, когда свет попадает на поверхность ПЗС-матрицы (плёночные камеры используют светочувствительность плёнки, покрытой галоидом серебра).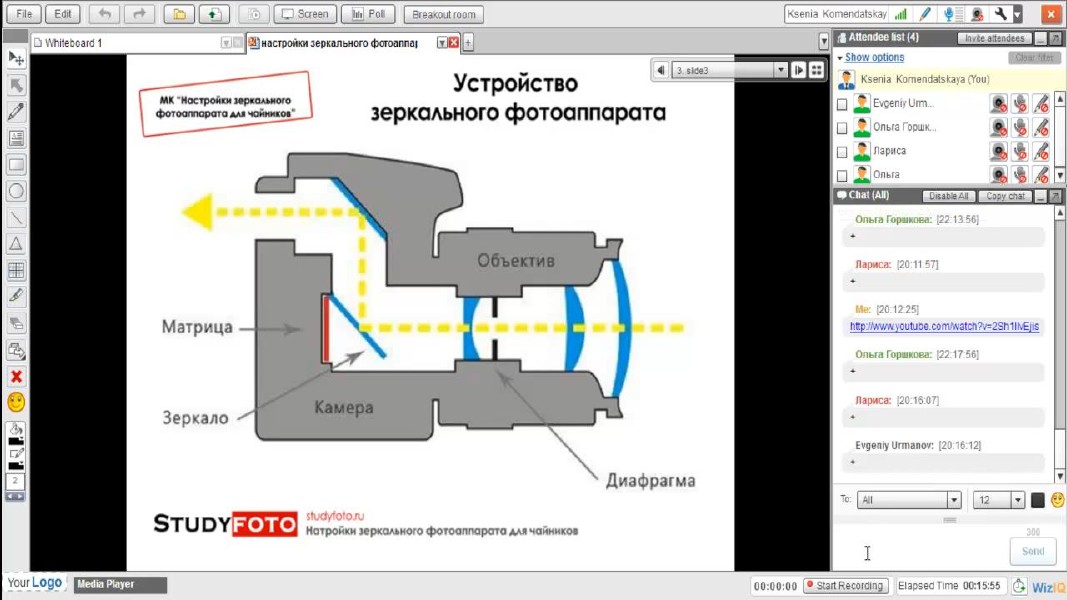 На поверхности ПЗС-матрицы миллионы рецепторов изображения- фотодиодов — образуют плотную сетку. Каждый фотодиод превращает крошечную часть общего количества полученного изображением света в электрический сигнал, который обеспечивает информацией одну фотографию.
Наиболее важной составляющей ПЗС является приемник света — двумерная матрица, состоящая из очень маленьких кремниевых детекторов света прямоугольной формы, называемых пикселами. Каждый пиксель работает как копилка для электронов, возникающих в нем под действием фотонов, пришедших от источника света. Во время экспозиции, время которой регулируется при помощи затвора, каждый пиксель постепенно заполняется электронами пропорционально количеству попавшего на него света.
На поверхности ПЗС-матрицы миллионы рецепторов изображения- фотодиодов — образуют плотную сетку. Каждый фотодиод превращает крошечную часть общего количества полученного изображением света в электрический сигнал, который обеспечивает информацией одну фотографию.
Наиболее важной составляющей ПЗС является приемник света — двумерная матрица, состоящая из очень маленьких кремниевых детекторов света прямоугольной формы, называемых пикселами. Каждый пиксель работает как копилка для электронов, возникающих в нем под действием фотонов, пришедших от источника света. Во время экспозиции, время которой регулируется при помощи затвора, каждый пиксель постепенно заполняется электронами пропорционально количеству попавшего на него света.
Считанный с каждого пиксела заряд зависит от количества света, которое попало на данную ячейку матрицы. Усиление сигнала происходит в зависимости от чувствительности, выбранной пользователем (100, 200, 400 ISO или больше). Чем больше выбираемая пользователем чувствительность отличается от реальной чувствительности сенсора, тем сильнее сигнал. Конечно, усиление сигнала негативно сказывается на изображении — начинают проявляться случайные помехи и выбросы, которые называют шумом. Чем больше матрица в целом, каждый отдельный пиксел и расстояние между ними, тем меньше шумов вносится в изображение, так как большинство дефектов получается от паразитного перетекания зарядов.
Конечно, усиление сигнала негативно сказывается на изображении — начинают проявляться случайные помехи и выбросы, которые называют шумом. Чем больше матрица в целом, каждый отдельный пиксел и расстояние между ними, тем меньше шумов вносится в изображение, так как большинство дефектов получается от паразитного перетекания зарядов.
Пишите нам: [email protected]
Как оценить чувствительность камеры
Сравнение характеристик камеры с использованием стандарта качества изображения EMVA1288
Что внутри:
- Введение в измерения характеристик изображения на основе EMVA1288
- Определение различных измерений и способы их измерения
- Сравнение характеристик камер при слабом освещении при разном времени выдержки
- Сравнение традиционной ПЗС-матрицы с современной КМОП-матрицей
- Сравнение поколений сенсоров Sony Pregius
- Заключение
Сравнить основные характеристики камеры, такие как частота кадров, разрешение и интерфейс, легко; используйте наш новый селектор камеры для фильтрации и сортировки 14+ спецификаций EMVA, чтобы найти точное соответствие требованиям вашего проекта. Однако сравнение характеристик изображений камер, таких как квантовая эффективность, временной темновой шум и способность насыщения, имеет тенденцию быть немного более сложным. Во-первых, нам нужно понять, что на самом деле означают эти различные измерения.
Однако сравнение характеристик изображений камер, таких как квантовая эффективность, временной темновой шум и способность насыщения, имеет тенденцию быть немного более сложным. Во-первых, нам нужно понять, что на самом деле означают эти различные измерения.
Что такое квантовая эффективность и измеряется ли она на пике или на определенной длине волны? Чем отношение сигнал / шум отличается от динамического диапазона? В этом техническом документе рассматриваются эти вопросы и объясняется, как сравнивать и выбирать камеры на основе данных о характеристиках изображения в соответствии со стандартом EMVA1288.
EMVA1288 — это стандарт, который определяет, какие аспекты характеристик камеры следует измерять, как их измерять и как представлять результаты единым методом. Первый раздел официального документа поможет понять различные аспекты работы датчика изображения. В нем будут изложены основные концепции, которые важно понимать при рассмотрении того, как датчик изображения преобразует свет в цифровое изображение и в конечном итоге определяет производительность датчика. На рисунке 1 представлен один пиксель и освещены эти концепции.
На рисунке 1 представлен один пиксель и освещены эти концепции.
Рисунок 1. Как датчик изображения преобразует свет в цифровое изображение
Сначала нам нужно понять шум, присущий самому свету. Свет состоит из дискретных частиц, фотонов, генерируемых источником света. Поскольку источник света генерирует фотоны в случайное время, в воспринимаемой интенсивности света будет шум. Физика света утверждает, что шум, наблюдаемый в интенсивности света, эквивалентен квадратному корню из числа фотонов, генерируемых источником света.Этот тип шума называется дробовым шумом.
Следует отметить, что количество фотонов, наблюдаемых пикселем, будет зависеть от времени экспозиции и интенсивности света. В этой статье мы будем рассматривать количество фотонов как комбинацию времени экспозиции и интенсивности света. Точно так же размер пикселя оказывает нелинейное влияние на способность датчика собирать свет, потому что его необходимо возвести в квадрат, чтобы определить светочувствительную область. Более подробно об этом пойдет речь в следующей статье в контексте сравнения производительности двух камер.
Более подробно об этом пойдет речь в следующей статье в контексте сравнения производительности двух камер.
Первым шагом в оцифровке света является преобразование фотонов в электроны. В этой статье не рассматривается, как это делают датчики, а скорее представлена мера эффективности преобразования. Отношение электронов, генерируемых в процессе оцифровки, к фотонам называется квантовой эффективностью (QE). Пример сенсора на Рисунке 1 имеет QE 50%, потому что 3 электрона генерируются, когда 6 фотонов «падают» на сенсор.
Перед оцифровкой электронов они сохраняются в пикселе, называемом колодцем.Количество электронов, которое может храниться в лунке, называется емкостью насыщения или глубиной лунки. Если яма получает больше электронов, чем емкость насыщения, дополнительные электроны не будут храниться.
Когда пиксель завершает сбор света, измеряется заряд в лунке, и это измерение называется сигналом. Измерение сигнала на рисунке 1 представлено стрелкой. Ошибка, связанная с этим измерением, называется временным темным шумом или шумом считывания.
Наконец, шкала серого определяется путем преобразования значения сигнала, выраженного в электронах, в 16-битное значение пикселя аналогово-цифровых единиц (ADU). Отношение между значением аналогового сигнала и значением цифровой шкалы серого называется усилением и измеряется в электронах на ADU. Параметр усиления, определенный в стандарте EMVA1288, не следует путать с коэффициентом усиления процесса «аналого-цифрового» преобразования.
При оценке характеристик камеры часто используют отношение сигнал / шум и динамический диапазон.Эти два показателя производительности камеры учитывают отношение шума, наблюдаемого камерой, к сигналу. Разница в том, что динамический диапазон учитывает только темпоральный темновой шум, в то время как отношение сигнал / шум также включает среднеквадратичное суммирование дробового шума.
Абсолютный порог чувствительности — это количество фотонов, необходимое для получения сигнала, эквивалентного шуму, наблюдаемому датчиком. Это важный показатель, поскольку он представляет собой теоретическое минимальное количество света, необходимое для наблюдения любого значимого сигнала. Подробности этого измерения будут более подробно описаны в следующих статьях.
Подробности этого измерения будут более подробно описаны в следующих статьях.
Чтобы помочь сравнить датчики и камеры, основанные на стандарте EMVA1288, FLIR провела первое в отрасли всестороннее исследование характеристик изображения более чем 70 моделей камер.
| Измерение | Определение | Под влиянием | Установка |
| Дробовой шум | Корень квадратный из сигнала | Вызвано природой света | e- |
| Размер пикселя | Ну, размер пикселя… | Конструкция датчика | мкм |
| Квантовая эффективность | Процент фотонов, преобразованных в электроны на определенной длине волны | Конструкция датчика | % |
| Временной темновой шум (шум чтения) | Шум в датчике при отсутствии сигнала | Конструкция сенсора и камеры | e- |
| Насыщаемость (глубина скважины) | Количество заряда, которое может удерживать пиксель | Конструкция сенсора и камеры | e- |
| Максимальное отношение сигнал / шум | Максимально возможное отношение сигнала ко всему шуму, включенному в этот сигнал, , включая дробовой шум и временный темновой шум . ” ” |
Конструкция сенсора и камеры | дБ, бит |
| Динамический диапазон | Отношение сигнал / шум, включая только временный темновой шум | Конструкция сенсора и камеры | дБ, бит |
| Абсолютный порог чувствительности | Количество фотонов, необходимое для получения сигнала, равного шуму | Конструкция сенсора и камеры | Ƴ |
| Усиление | Параметр, указывающий, насколько большое изменение электронов необходимо для наблюдения изменения в 16-битных ADU (более известных как шкала серого) | Конструкция сенсора и камеры | e- / ADU |
Сравнение характеристик камер при слабом освещении
В рамках этого технического документа мы будем рассматривать такие приложения, как распознавание номерных знаков (LPR) или оптическое распознавание символов (OCR), где обычно используется монохромное изображение, а количество света, которое может улавливать камера, может быть ограничено из-за короткой выдержки. раз.Достаточно просто определить разрешение, частоту кадров и поле зрения, необходимые для решения проблемы изображения, однако решить, будет ли камера иметь достаточную производительность изображения, может быть сложнее.
раз.Достаточно просто определить разрешение, частоту кадров и поле зрения, необходимые для решения проблемы изображения, однако решить, будет ли камера иметь достаточную производительность изображения, может быть сложнее.
Эта проблема обычно решается методом проб и ошибок. Давайте рассмотрим пример, в котором разработчик системы технического зрения определяет, что для приложения достаточно VGA-камеры с ’’ CCD, работающей со скоростью 30 кадров в секунду. Первоначальные тесты могут показать, что камера имеет достаточную чувствительность при выдержке 10 мс, когда объект неподвижен.См. Рисунок 2, на котором показан простой пример с символами B, 8, D и 0, которые можно легко спутать с помощью алгоритма машинного зрения. Верхнее левое изображение, полученное с помощью ¼ ’’ CCD-камеры, дает изображения, подходящие для обработки изображений.
Рисунок 2: Результаты, полученные с помощью ПЗС-камер 1/4 » и 1/2 » при разном времени выдержки
Однако, когда объект начинает двигаться, время экспозиции необходимо уменьшить, а камера не может предоставить полезную информацию, потому что буквы «B» и «D» нельзя отличить от цифр «8» и «0». Изображения в среднем и нижнем левом углу рисунка 2 показывают ухудшение качества изображения. В частности, ’’ CCD при времени экспозиции 2,5 мс дает изображения, непригодные для обработки изображений.
Изображения в среднем и нижнем левом углу рисунка 2 показывают ухудшение качества изображения. В частности, ’’ CCD при времени экспозиции 2,5 мс дает изображения, непригодные для обработки изображений.
В данном примере предполагается, что большая глубина резкости не требуется, и поэтому минимальное F-число объектива является приемлемым. Другими словами, невозможно собрать больше света, открыв затвор объектива.
Итак, дизайнеру нужно подумать о другой камере.Вопрос в том, может ли другая камера улучшить производительность системы. Использование более крупного датчика обычно считается хорошим способом решения проблем с низкой освещенностью, поэтому датчик ½ ’’ может быть хорошим выбором. Но вместо того, чтобы продолжать метод проб и ошибок, может оказаться полезным рассмотрение производительности камеры EMVA 1288.
| Камера | Датчик | Размер пикселя (мкм) | Квантовая эффективность (%) | Темпоральный темновой шум (e-) | Емкость насыщения (эл. ) ) |
| 1/4 ’’ Камера (FL3-GE-03S1M-C) |
ICX618 | 5.6 | 70 | 11,73 | 14 508 |
| 1/2 «камера (BFLY-PGE-03S3M-C) |
ICX414 | 9,9 | 39 | 19,43 | 25 949 |
Глядя на данные EMVA 1288, можно заметить, что ’’ сенсор имеет лучшую квантовую эффективность и более низкий уровень шума, но ½ ’’ CCD имеет больший пиксель и большую способность к насыщению. В этой статье показано, как определить, будет ли камера ½ «» работать лучше.
На рис. 3 камеры сравниваются путем построения графика зависимости величины сигнала от плотности света (фотоны / мкм2). Сигнал как функция плотности света определяется по следующей формуле:
Важное предположение, сделанное в этой статье, заключается в том, что у объективов одинаковое поле зрения, одинаковое число F и одинаковые настройки камеры.
Рисунок 3: Сигнал, создаваемый камерами CCD 1/4 » и 1/2 », в зависимости от уровня освещенности
Подпишитесь, чтобы получить больше подобных статей
Зарегистрироваться
На рисунке показано, что при той же плотности света датчик ½ ’’ будет генерировать более высокий сигнал. Также можно заметить, что насыщение происходит при аналогичном уровне плотности света 700 фотонов / мкм2, однако датчик ½ ’’ имеет значительно более высокую насыщающую способность.
В приложении, рассматриваемом в этом техническом документе, сравнение камер необходимо проводить при низком уровне освещенности. Поэтому рассмотрение уровней шума становится особенно важным.
На рисунке 4 показаны сигнал и шум при слабом освещении. Шум, представленный на рисунке, представляет собой сумму среднеквадратичного значения временного темнового шума и дробового шума, который был рассчитан по следующей формуле:
Рисунок 4: Сигнал и шум ПЗС-камер 1/4 » и 1/2 » при низкой освещенности
График показывает, что абсолютный порог чувствительности (уровень освещенности, при котором сигнал равен шуму) достигается датчиком ½ ’’ на несколько более низком уровне, чем у датчика ’’.Более важной мерой, необходимой для определения того, какая камера будет работать лучше при слабом освещении, является отношение сигнал / шум (SNR).
На рисунке 5 показано соотношение сигнал / шум двух камер в зависимости от уровня освещения.
Рисунок 5: Отношение сигнал / шум для камер CCD 1/4 » и 1/2 » при низкой освещенности
Исходя из более высокого отношения сигнал / шум датчика ½ ’’, теория предполагает, что камеры ½ ’’ должны работать лучше, чем камера ’’ при слабом освещении.
Из изображений на Рисунке 2 видно, что при времени экспозиции 2,5 мс датчик ½ ’’ сохраняет форму символов при всех временах выдержки, в то время как датчик ’’ затрудняет различение символов. Таким образом, датчик ½ ’’ работает лучше, а практические результаты соответствуют теории.
Компания FLIR провела обширное исследование камер и опубликовала результаты работы с изображениями EMVA 1288. Эта информация может использоваться для сравнения производительности различных моделей камер.Хотя реализация камеры действительно влияет на качество изображения, это исследование в целом может быть полезно при сравнении любых двух камер с датчиками, описанными в документе.
FLIR предлагает специальные документы для сравнения камер. Свяжитесь с [email protected], чтобы запросить сравнение моделей камер FLIR.
Следует отметить, что метод, описанный в этом техническом документе, полезен для получения общего представления о том, насколько хорошо одна камера будет работать по сравнению с другой. Этот метод может помочь исключить камеры, которые вряд ли улучшат требуемую производительность, однако окончательная проверка производительности камеры проводится в реальном приложении.
Сравнение традиционной ПЗС-матрицы с современной КМОП-матрицей
Теперь мы сравним характеристики традиционного ПЗС-сенсора и современного КМОП-сенсора в условиях низкой освещенности и в сцене с широким диапазоном условий освещения.
В предыдущем разделе мы показали, что камера с Sony ICX414, ПЗС-матрица VGA ½ дюйма, работает лучше в условиях низкой освещенности, чем камера с Sony ICX618, ПЗС-матрица VGA ¼ ’’. Теперь мы сравним ½ ’’ VGA CCD с новым Sony Pregius IMX249, 1/1.2 ’’ КМОП-матрица с разрешением 2,3 мегапикселя с глобальным затвором.
На первый взгляд это может показаться сравнением «яблок с апельсинами», однако стоимость камер с этими двумя датчиками сопоставима и составляет примерно 400 евро, интересующая область VGA в CMOS-камере на самом деле ближе к оптическому размеру » камера и частота кадров также аналогичны при разрешении VGA.
Данные EMVA 1288 для камер показывают, что CMOS-датчик IMX249 имеет значительно лучшую квантовую эффективность, более низкий уровень шума и более высокую насыщающую способность.С другой стороны, матрица CCD ICX414 имеет больший пиксель, что было критическим параметром в примере, представленном в предыдущей статье.
| Камера | Датчик | Размер пикселя (мкм) | Квантовая эффективность (%) | Темпоральный темновой шум (e-) | Емкость насыщения (эл.) |
| 1/2 «ПЗС-камера (BFLY-PGE-03S3M-C) |
ICX414 | 9.9 | 39 | 19,43 | 25 949 |
| 1 / 1,2-дюймовая CMOS-камера (BFLY-PGE-23S6M-C) |
IMX249 | 5,86 | 80 | 7,11 | 33,105 |
Рисунок 6: Отношение сигнал / шум датчиков ICX414 CCD и IMX249 CMOS при низких уровнях освещенности
Рисунок 7: Результаты, полученные с помощью датчиков ICX414 CCD и IMX249 CMOS при разном времени экспозиции
Более интересное сравнение проводится при более высокой интенсивности света из-за разницы в способности насыщения между двумя датчиками.На рис. 8 показан сигнал как функция интенсивности света во всем диапазоне интенсивностей света. Из графика видно, что ПЗС-датчик ICX414 достигнет насыщающей способности около 700 фотонов / мкм 2 , в то время как CMOS-датчик IMX249 будет насыщаться при более чем 1200 фотонов / мкм 2 .
Рисунок 8: Сигнал, создаваемый ПЗС-матрицей ICX414 и КМОП-матрицей IMX249, в зависимости от уровня освещенности
Первый вывод, который можно сделать, заключается в том, что изображение, создаваемое датчиком ICX414 CCD, будет ярче, чем изображение, созданное датчиком IMX249 CMOS.Если это не очевидно из графика, рассмотрите изображение, которое будет получено при плотности около 700 фотонов / мкм2. В случае сенсора ICX414 CCD изображение должно иметь самые высокие уровни шкалы серого, скорее всего, насыщенное, в то время как сенсор IMX249 CMOS будет выдавать изображение с яркостью чуть более 50% от максимальной. Это наблюдение важно, потому что наивный подход к оценке чувствительности камеры заключается в наблюдении за яркостью изображения. Другими словами, предполагается, что более яркое изображение будет получено с камеры с более высокими характеристиками.Однако это неверно, и в этом примере на самом деле все наоборот: камера, которая создает более темные изображения, на самом деле имеет лучшую производительность.
Рисунок 9: Результаты, полученные с помощью датчиков ICX414 CCD и IMX249 CMOS в сложных условиях освещения
Второе наблюдение заключается в том, что CMOS-датчик IMX249 создает изображения, которые полезны для обработки изображений в более широком диапазоне условий освещения. На рисунке 9 показана одна и та же сцена, полученная двумя камерами.Следует отметить, что более темная часть изображений была улучшена для отображения, однако основные данные не были изменены. Из изображений видно, что ПЗС ICX414 насыщена в светлых областях сцены, в то же время в темных областях слишком много шума, чтобы символы были различимы. Напротив, CMOS-датчик IMX249 создает четкие символы в ярких и темных частях сцены.
Наконец, мы можем сделать вывод, что недавняя технология CMOS с глобальным затвором стала жизнеспособной альтернативой CCD в приложениях машинного зрения.Датчики не только менее дороги, имеют более высокую частоту кадров при эквивалентном разрешении и не имеют таких артефактов, как размытие и размытие, но и превосходят характеристики изображения ПЗС-матриц.
Сравнение поколений Sony Pregius
Как мы уже говорили в предыдущем разделе, размер сенсора сильно влияет на производительность сенсора из-за того, что более крупные пиксели позволяют собирать в них большее максимальное количество фотонов, а также позволяют собирать больше фотонов при тех же условиях освещения.Компромисс для увеличения размера пикселя заключается в том, что размер сенсора должен быть больше, чтобы соответствовать заданному разрешению, по сравнению с использованием сенсора с меньшим размером пикселя, что увеличивает стоимость сенсора. На рисунке ниже показано, как изменился размер пикселя между различными поколениями сенсоров Sony Pregius.
Рисунок 10: Различия в размере пикселей между различными поколениями сенсоров Sony Pregius
Несмотря на тенденцию к уменьшению размера пикселя (помимо сенсора 3-го поколения), качество изображения сенсора увеличивалось с каждым поколением, за исключением емкости сенсора.Основная причина улучшения качества изображения заключается в низком временном темновом шуме датчика, обнаруженного во 2-м поколении и более поздних версиях. На приведенном ниже рисунке показано, как временный темновой шум датчика прогрессировал в различных поколениях датчика Pregius.
Рис. 11. Pregius S поддерживает низкий уровень шума чтения
Чтобы получить полное представление о характеристиках сенсора, обратитесь к таблице ниже, где указаны характеристики типичного сенсора каждого поколения Pregius.
Просматривая приведенную выше таблицу, можно заметить, что, несмотря на наименьший размер пикселя, качество изображения датчика Pregius S сравнимо с датчиками 2-го и 3-го поколения, это связано с конструкцией датчика с задней подсветкой, которая позволяет использовать более широкий угол входа фотона, который помогает захватить больше света на пиксель.
Рис. 12. Датчики BSI меняют традиционную конструкцию датчика с передней подсветкой, что упрощает проникновение фотонов на светочувствительный фотодиод каждого пикселя
Эта новая конструкция датчика позволяет семейству датчиков Pregius S поддерживать характеристики изображения предыдущих поколений, используя при этом самый маленький пиксель, что приводит к датчикам с более высоким разрешением по относительно низким ценам.
Заключение
В этом техническом документе мы изучили ключевые концепции, используемые при оценке производительности камеры. Мы представили стандарт EMVA1288 и применили результаты для сравнения характеристик камеры в различных условиях освещения. Есть еще много других аспектов производительности камеры, которые можно учитывать при оценке камеры. Например, квантовая эффективность резко меняется на разных длинах волн, поэтому камера, которая хорошо работает на 525 нм, может не работать так хорошо, когда источник света находится на частотах, близких к инфракрасному (БИК).Точно так же при длительной экспозиции, характерной для флуоресценции и астрономических изображений, необходимо учитывать влияние темнового тока, типа шума, который важен при чрезвычайно низких уровнях освещенности.
Выбрать правильную камеру на основе характеристик изображения непросто, однако мы надеемся, что этот технический документ немного помог разобраться в этой увлекательной и сложной теме.
Отфильтруйте и отсортируйте, используя более 14 спецификаций EMVA, чтобы найти точное соответствие требованиям вашего проекта — попробуйте наш новый селектор камеры.
Оценка чувствительности камеры CCD — Oxford Instruments
Ключевые факторы, которые необходимо учитывать
Чувствительность — ключевая характеристика любой системы обнаружения. При оценке чувствительности любого ПЗС-сенсора ключевое значение имеет достижимое отношение сигнал / шум (SNR) . Это заключает в себе способность выделять сигнал из окружающего шума.
Рис. 1: Предел обнаружения как функция времени экспозиции для одного пикселя (режим визуализации), который считывается с частотой 33 кГц с шумом считывания 4,6 электрона.
Подход к обеспечению наилучшего возможного отношения сигнал / шум состоит в следующем: а) разработать датчик с максимально возможной квантовой эффективностью и б) свести к минимуму различные источники шума.
Квантовая эффективность (QE) связана со способностью датчика реагировать на входящий фотонный сигнал и преобразовывать его в измеряемый электронный сигнал.Очевидно, что чем больше количество фотоэлектронов, произведенных для данного сигнала фотона, тем выше QE. QE обычно выражается как вероятность — обычно дается в процентном формате — где, например, QE 0,6 или 60% указывает на 60% вероятность того, что фотоэлектрон будет выпущен для каждого падающего фотона. QE является функцией, зависящей от длины волны или энергии фотона, и обычно выбирается датчик, который имеет наивысшее QE в интересующей области длин волн. Для повышения квантовой эффективности ПЗС-сенсоров использовались различные средства.К ним относятся:
- Заднее освещение — сенсор утончается сзади, и свет проходит через заднюю часть, что облегчает проникновение падающих фотонов в активный слой сенсора и их поглощение.
- Антибликовые покрытия — оптимизированы для конкретного диапазона длин волн
- Глубокое истощение — когда активный слой увеличен в размерах для увеличения вероятности поглощения фотонов в ближней инфракрасной (БИК) части спектра
- Покрытия Lumogen — для повышения чувствительности в УФ-области за счет поглощения и преобразования УФ-фотонов в видимые фотоны, которые легче обнаруживаются ПЗС-матрицей
- Микролинзы — более подходящие для датчиков изображения, чем спектроскопия — позволяют собирать больше света в чувствительной области датчика, что приводит к увеличению коэффициента заполнения
Источники шума
Следующая ключевая задача — снизить общий уровень шума до минимума (последний часто называют минимальным уровнем шума).Дробовой шум в генерируемом фотоном (электронном) сигнале (S) является существенным вкладом в общий шум и связан с фундаментальной квантовой физикой; он всегда будет частью любого сигнала. Если количество фотонов в падающем сигнале обозначено P, а квантовая эффективность — QE, генерируемый фотоэлектронный сигнал будет иметь вид S = (QE.P). Далее следует рассмотреть шум системы или камеры, который имеет три основных фактора: темновой ток (DC) датчика, паразитный заряд, такой как индуцированный тактовый заряд (CIC), и шум считывания из выходной электроники (предусилитель и A / D узел).Источники шума и способы борьбы с ними кратко описаны ниже:
- Signal Shot Noise (NSN) — фундаментально присущ любому сигналу NSN = vS = v (QE.P)
- Темновой шум (NDN) — связанный с термически генерируемым темновым током NDN = v (DC.t) — где «t» соответствует времени воздействия: темновой ток (DC) уменьшается за счет охлаждения датчика
- Clock Induced Charge Noise (NCIC) — паразитный шум, генерируемый во время синхронизации пикселей при перемещении заряда из датчика; это сводится к минимуму за счет применения точно настроенных и хорошо контролируемых синхронизирующих напряжений, в частности точного управления фронтами тактирования вплоть до разрешения наносекунд
- Шум считывания (NRN) — он возникает в считывающей электронике до того, как оцифрованный сигнал будет отправлен на ПК, и может быть уменьшен за счет использования более низкой скорости считывания и чистых тактовых импульсов
Обычно высокопроизводительная камера работает при определенных температурах и тактовых частотах, что предел обнаружения определяется шумом считывания.Различные источники шума могут быть добавлены в квадратуре, чтобы получить общий шум системы или камеры, который может быть выражен как:
Характеристики системного шума для типичной камеры iDus — BRDD CCD показаны на рисунке 1. Очевидно, что темновой шум будет расти с увеличением времени выдержки, так что для длинных выдержек общий шум системы (и, следовательно, предел обнаружения) будет преобладать вклад темнового шума. При охлаждении вклад темнового шума значительно снижается, а при достаточном охлаждении он может быть снижен до незначительного уровня.Это проявляется как область плато, где теперь шум системы ограничен шумом считывания.
Преимущество охлаждения очевидно, когда в данном эксперименте требуется чрезвычайно длительное время воздействия (> 10 секунд, если не 100 секунд). Однако, если используется короткое время выдержки, очевидно, что от сверхглубокого охлаждения мало пользы. В качестве иллюстрации рассмотрим время экспозиции менее 1000 секунд (большое время экспозиции).
Охлаждение сенсора ниже -75ºC, где система работает на низком плато, соответствующем режиму ограничения шума считывания, практически не дает никакого преимущества.Точно так же, если используются выдержки менее 10 с, охлаждение ниже -50 ° C не принесет или не принесет никакой пользы. Когда учитывается температурная зависимость QE, нужно быть осторожным при выборе наилучшей рабочей точки или температуры для оптимальной производительности, особенно при работе в ближней ИК-области
.Общий сигнал / шум (SNR) для данной системы CCD может быть выражен в форме:
Эта функция позволяет оценить характеристики любой стандартной ПЗС-матрицы по значениям ключевых параметров, которые обычно содержатся в технических характеристиках или технических характеристиках.
Следует отметить следующие моменты:
- QE имеет некоторую температурную зависимость, которая имеет особое значение при работе в ближней ИК-области — простое охлаждение датчика до минимально возможной температуры не обязательно обеспечивает оптимальную производительность камеры
- требования к охлаждению несколько снижаются при использовании короткого времени выдержки (<1 с)
- Для более длительных выдержек (> 10 с) требуется глубокое охлаждение
Усовершенствованные детекторы были разработаны для расширения чувствительности до уровня обнаружения одиночного фотона.Эти системы усиливают первоначально обнаруженный сигнал, используя процесс умножения, приводящий к увеличению отношения сигнал / шум при считывании с ПЗС-матрицы. Две основные технологии:
- ICCD — устройства с усиленной зарядовой парой, в которых перед стандартной камерой CCD добавлена усилительная трубка; в усилителе используется микроканальная пластина (MCP) для усиления сигнала перед обнаружением на CCD .
- EMCCD — Устройство электронного умножения (ЭМ) с зарядовой связью, в котором используется датчик со специальным регистром считывания; Регистр ЭМ усиливает электронный сигнал с помощью процесса, известного как ионная ионизация
Степень усиления или умножения основного сигнала называется коэффициентом усиления.Это может быть выбрано с помощью программного обеспечения и приводит к изменению напряжений на MCP в случае ICCD и синхронизирующих напряжений, подаваемых в регистр считывания EM EMCCD.
При использовании EMCCD или ICCD необходимо учитывать дополнительный источник шума, связанный с самим процессом усиления; это изменение присуще любому процессу умножения. Это количественно определяется так называемым шумовым фактором (F). Для камер EMCCD коэффициент шума составляет v2 или ~ 1.41. Коэффициент шума в ICCD зависит от типа и качества используемой усилительной лампы: они могут иметь значения от ~ 1,6 до ~ 3,5. Принимая во внимание коэффициент шума (F) и фактическое или реальное усиление (G), общий шум для систем, предлагающих усиление, может быть выражен как:
Отношение SNR для EMCCD или ICCD можно записать как:
Когда высокопроизводительные системы работают в режиме глубокого охлаждения с низким уровнем шума, где темновой и паразитный шум пренебрежимо мал по сравнению с шумом считывания, это выражение для отношения сигнал / шум можно упростить до:
Здесь можно увидеть, что при увеличении коэффициента усиления G член, связанный с шумом считывания, NRN, становится несущественным по сравнению с собственным дробовым шумом сигнала, что приводит к сверхчувствительной способности обнаружения.Системы EMCCD и ICCD, работающие с соответствующими конфигурациями с достаточно высоким коэффициентом усиления, могут использоваться для экспериментов с подсчетом одиночных фотонов.
Ознакомьтесь с нашими соответствующими активами ниже …
Спектральная чувствительность камерыи оценка баланса белого по изображениям неба
Barnard, K., & Funt, B. (2002). Характеристики камеры для исследования цвета. Исследование и применение цвета , 27 (3), 153–164.
Google Scholar
Buil, C.(2005). Сравнительный тест между Canon 10D и Nikon D70 . Получено 31 мая 2013 г. с сайта http://www.astrosurf.com/buil/d70v10d/eval.htm.
Чайвиватворакул, П., и Чирараттананон, С. (2004). Исследование атмосферной мутности тайского неба. Энергетика и строительство , 36 , 650–659.
Артикул Google Scholar
Чакрабарти, А., Шарштейн, Д., и Зиклер, Т.(2009). Эмпирическая модель камеры для цветного зрения в Интернете. В Труды Британской конференции по машинному зрению .
Debevec, P., Hawkins, T., Tchou, C., Duiker, H.P., Sarokin, W., & Sagar, M. (2000). Получение поля отражения человеческого лица. В транзакциях ACM с графикой (SIGGRAPH).
Эбнер, М. (2007). Оценка спектральной чувствительности цифрового датчика с использованием калибровочных мишеней. В материалах конференции по генетическим и эволюционным вычислениям (стр.642–649).
Финлейсон, Г., Хордли, С., и Хьюбел, П. (1998). Восстановление чувствительности устройств с помощью квадратичного программирования. В Proceedings of Color Science, System, and Application (стр. 90–95).
Frieden, B.R. (1983). Вероятность, статистическая оптика и проверка данных: подход к решению проблем . Springer.
Хабер, Т., Фукс, К., Бекаерт, П., Зайдель, Х. П., Джоеселе, М., и Ленш, Х. П. А. (2009). Пересветка объектов из коллекций изображений.В трудах компьютерного зрения и распознавания образов (стр. 627–634).
Хара К., Нишино К. и Икеучи К. (2005). Положение источника света и оценка отражательной способности с одного ракурса без предположения о дальнем освещении. Транзакции IEEE по анализу шаблонов и машинному анализу , 27 (4), 493–505.
Артикул Google Scholar
Хордли, С. Д. (2006). Оценка освещенности сцены: прошлое, настоящее и будущее. Исследование и применение цвета , 31 (4), 303–314.
Артикул Google Scholar
Хьюбел П. М., Шерман Д. и Фаррелл Дж. Э. (1994). Сравнение методов оценки спектральной чувствительности сенсоров. In Proceedings of Color Science, System, and Application (стр. 45–48).
Икеучи, К. (1981). Определение ориентации зеркальных поверхностей с помощью метода фотометрического стерео. Транзакции IEEE по анализу шаблонов и машинному анализу , 3 (6), 661–669.
Артикул Google Scholar
Икеучи, К., и Хорн, Б. К. П. (1981). Числовая форма от затенения и перекрывающих границ. Искусственный интеллект , 17 (1–3), 141–184.
Google Scholar
Джадд, Д. Б., Макадам, Д.L., Wyszecki, G., Budde, H.W., Condit, H.R., Henderson, S.T., et al. (1964). Спектральное распределение обычного дневного света как функция коррелированной цветовой температуры. Журнал Оптического общества Америки , 54 (8), 1031–1036.
Артикул Google Scholar
Каваками Р., Икеучи К. (2009). Оценка цвета по одному цвету поверхности. В трудах по компьютерному зрению и распознаванию образов (стр.635–642).
Кеннеди Дж. И Эберхарт Р. (1995). Оптимизация роя частиц. В материалах Международной конференции IEEE по нейронным сетям (стр. 1942–1948).
Кутхируммал, С., Агарвала, А., Гольдман, Д. Б., и Наяр, С. К. (2008). Приоры для больших коллекций фотографий и что они говорят о камерах. В материалах Европейской конференции по компьютерному зрению (стр. 74–87).
Лалонд, Дж. Ф., Эфрос, А. А., и Нарасимхан, С.Г. (2009). Оценка естественного освещения по одному наружному изображению. В материалах Международной конференции по компьютерному зрению (стр. 183–190).
Лалонд, Дж. Ф., Нарасимхан, С. Г., и Эфрос, А. А. (2010). Что солнце и небо говорят нам о камере? Международный журнал компьютерного зрения , 88 (1), 24–51.
Артикул Google Scholar
Ли, Ю., Лин, С., Лу, Х., & Шум, Х. Ю. (2003). Оценка освещения с несколькими метками в текстурированных сценах. В материалах Международной конференции по компьютерному зрению (стр. 1366–1373).
Лин, С., Гу, Дж. У., Ямазаки, С., и Шум, Х. Ю. (2004). Радиометрическая калибровка по одному изображению. В трудах компьютерного зрения и распознавания образов (стр. 938–945).
Лопес-Морено, Дж., Хадап, С., Рейнхард, Э., Гутьеррес, Д. (2010). Составление изображений с помощью обнаружения источника света. Компьютеры и графика , 6 (34), 698–707.
Артикул Google Scholar
Маккартни, Э. Дж. (1976). Оптика атмосферы: рассеяние на молекулах и частицах . Нью-Йорк: Вили.
Google Scholar
Парккинен, Дж. П. С., Халликайнен, Дж., И Яаскелайнен, Т. (1989). Характерные спектры цветов Манселла. Журнал Оптического общества Америки , 6 (2), 318–322.
Артикул Google Scholar
Перес, Р., Силз, Р., и Михалски, Дж. (1993). Всепогодная модель для распределения яркости неба. Солнечная энергия , 50 (3), 235–245.
Google Scholar
Пратт, В. К., и Мэнсилл, К. Э. (1976). Спектральные методы оценки для спектральной калибровки сканера цветных изображений. Прикладная оптика , 15 (1), 73–75.
Артикул Google Scholar
Притам, А. Дж., Ширли, П., и Смитс, Б. (1999). Практическая аналитическая модель для дневного света. В транзакциях ACM с графикой (SIGGRAPH).
Раманат Р., Снайдер В., Ю Й. и Дрю М. (2005). Конвейер обработки цветных изображений. Журнал обработки сигналов IEEE , 22 (1), 34–43.
Артикул Google Scholar
Рейнхард, Э., Адихмин, М., Гуч, Б., и Ширли, П. (2001). Передача цвета между изображениями. Компьютерная графика и приложения , 21 (5), 34–41.
Артикул Google Scholar
Сато И., Сато Ю. и Икеучи К. (2003). Освещение от теней. Транзакции IEEE по анализу шаблонов и машинному анализу , 25 (3), 290–300.
Артикул Google Scholar
Шарма, Г., И Трассел Х. Дж. (1993). Характеристика чувствительности сканера. В трудах о трансформациях и переносимости цвета (стр. 103–107).
Слейтер Д. и Хили Г. (1998). Какова спектральная размерность функций освещения в уличных сценах ?. В трудах компьютерного зрения и распознавания образов (стр. 105–110).
Снавели Н., Зейтц С., Селиски Р. (2006). Фототуризм: изучение коллекций изображений в 3D. В транзакциях ACM с графикой (SIGGRAPH).
Такамацу, Дж., Мацусита, Ю., и Икеучи, К. (2008). Оценка функций отклика камеры с использованием вероятностного подобия интенсивности. В Труды компьютерного зрения и распознавания образов .
Тан, Р. Т., Нишино, К., и Икеучи, К. (2004). Постоянство цвета через обратное пространство интенсивности-цветности. Журнал Оптического общества Америки , 21, (3), 321–334.
Google Scholar
Томсон, М., & Westland, S. (2001). Получение цветного изображения с помощью параметрической подгонки отклика сенсора. Исследование и применение цвета , 26 (6), 442–449.
Google Scholar
ван де Вейер, Дж., Геверс, Т., и Гийсений, А. (2007). Постоянство цвета по краям. Транзакции IEEE при обработке изображений , 16 (9), 2207–2214.
Google Scholar
Вора, П.Л., Фаррелл, Дж. Э., Тиц, Дж. Д., Брейнард, Д. Х. (1997). Цифровые цветные фотоаппараты. 2. Спектральный отклик. Технический отчет HPL-97-54.
Вудхэм, Р. Дж. (1980). Фотометрический метод определения ориентации поверхности по нескольким изображениям. Оптическая инженерия , 19 (1), 139–144.
Артикул Google Scholar
Wyszecki, G., & Stiles, W. S. (1982). Наука о цвете .Нью-Йорк: публикация Wiley Interscience.
Google Scholar
Ю. Ю., Малик Дж. (1998). Восстановление фотометрических свойств архитектурных сцен по фотографиям. В транзакциях ACM с графикой (SIGGRAPH).
Чжан Р., Цай П., Крайер Дж. Э. и Шах М. (1999). Числовая форма от затенения и перекрывающих границ. Транзакции IEEE по анализу шаблонов и машинному анализу , 21, (8), 690–706.
Артикул Google Scholar
Чжао, Х. (2013). База данных спектральной чувствительности . Получено 31 мая 2013 г. с сайта http://www.cvl.iis.u-tokyo.ac.jp/~zhao/database.html.
Чжао, Х., Каваками, Р., Тан, Р. Т., и Икеучи, К. (2009). Оценка базисных функций спектральной чувствительности цифровых фотоаппаратов. In Встреча по распознаванию и пониманию изображений .
Чувствительность ISO — цифровая фотография.com — Цифровая фотография и цифровые зеркальные камеры Nikon. Более сфокусированный.
Чувствительность ISO — это единица измерения чувствительности датчика изображения к свету.
Высокая чувствительность ISO означает, что вам нужно меньше света, чтобы получить яркое изображение.
Стандартные значения чувствительности ISO основаны на стандартной чувствительности 100 путем удвоения чисел:
| 100 — 200 — 400 — 800 — 1600 — 3200 — 6400 -… |
Современные зеркальные фотоаппараты выходят за рамки последнего диапазона до ISO 25600, а топовые модели профессиональных камер даже выше.
Что касается диафрагмы и времени экспозиции, эта серия построена с шагом от значений полной экспозиции. Каждая чувствительность ISO в серии требует вдвое меньшего количества света, чем предыдущая, и может быть экспонирована с половиной времени экспозиции или следующей меньшей диафрагмой (= следующее большее число f), чтобы яркость фотографии оставалась неизменной.
Также здесь камеры используют дополнительные промежуточные значения, которые не показаны выше.
Слева несколько примеров того, как цифровые камеры отображают чувствительность ISO.Первые два пытаются сказать вам, что они изменяют чувствительность ISO автоматически, затем есть монитор камеры DSLR, установленный на ISO 200, а последний — ЖК-дисплей, который не показывает чувствительность ISO — это также возможно.
Определение светочувствительности в ISO — это стандарт, который цифровая фотография пришла на смену пленочной фотографии. «ISO» — это аббревиатура Международной организации по стандартизации, которая определяет этот стандарт, а не конкретный термин из фотографии.
Чувствительность ISO обычно указывается как, например, «ISO 100».
В цифровой фотографии чувствительность пленки к свету моделируется путем усиления сигналов с датчика изображения.
Следовательно, чувствительность ISO — это настройка, которая может меняться для каждого снимка — преимущество по сравнению со съемкой на пленку, когда вам нужно было заменить рулон пленки, чтобы получить другую чувствительность ISO.
В зависимости от настроек вашей камеры может случиться так, что камера автоматически изменит чувствительность ISO, если сочтет это необходимым или вам нужно будет настроить ее самостоятельно.
В поисках хорошего цвета — 1. Функции спектральной чувствительности (SSF) и профили камеры — обработка
Пожалуй, я должен также упомянуть, что мои мотивы могут немного отличаться от ваших. Я пейзажный фотограф, работающий при естественном освещении, поэтому предельная точность очень насыщенных цветов не является необходимой, и, возможно, точность цветов не так уж и важна, если кто-то все равно склонен манипулировать изображением для получения всевозможных художественных эффектов.Тем не менее, я в подавляющем большинстве предпочитаю относительно более низкую насыщенность, более низкую контрастность и более близкие к реалистичным цветам для большей части моей работы, а наличие хорошего настраиваемого профиля камеры — отличная нейтральная отправная точка, которую я могу использовать в качестве ориентира или реальности. проверьте, нужно ли мне.
По этой причине мне не очень выгодно использовать цель с глубокими насыщенными цветами, не говоря уже о том, что фотографировать при дневном свете на открытом воздухе было бы кошмаром. Для всех, у кого есть схожие со мной потребности, все, что я действительно хотел сказать, это то, что вы можете получить фантастические результаты только с CC24, простота его довольно замечательна, учитывая, насколько хорошо он работает, и вы можете получить это немедленно (при условии, что у вас уже есть CC24) без необходимости выяснять проблемы для получения SSF вашей камеры.Андерс Тогер говорит примерно об этом и знает
. ggbutcher:Что я не могу сказать об этом, так это о нелинейности спада фильтров CFA и соответствующей вещи в функциях согласования цветов CIE 1931. График спектральной чувствительности D7000 выше показывает это; в переходах между фильтрами происходит много смешивания, и это не «линейно», чтобы перегружать этот термин.
Возможно, я смогу отослать вас к этому, соответствующие части скопированы ниже: https: // torger.se / anders / photography / camera-profiling.html # matrix_profile
Самый простой профиль камеры преобразует необработанные каналы RGB камеры в CIE XYZ с матрицей, и, попав в это пространство, стандартные алгоритмы управления цветом могут преобразовать в значения RGB, подходящие для наших экранов (и, наконец, принтеров).
«Преобразование с помощью матрицы» означает простое умножение, например:
X = R * a1 + G * a2 + B * a3
Y = R * b1 + G * b2 + B * b3
Z = R * c1 + G * c2 + B * c3
То есть имеем матрицу 3×3 констант.Если бы в камерах были цветные фильтры, которые точно соответствовали функциям согласования цветов XYZ, матрица была бы «тождественной матрицей»:
1 0 0
0 1 0
0 0 1
таким образом, что X = R, Y = G и Z = B. Идеальное совпадение также было бы, если бы функции спектральной чувствительности представляли собой любую линейную комбинацию функций согласования цветов (что если существовала матрица, отличная от единичной матрицы, но всегда приводившая к тем же значениям XYZ, что и функции согласования цветов XYZ).Это называется условием Лютера-Айвса, но оно никогда не выполняется реальной камерой.
Вместо этого выводится матрица с наименьшей возможной ошибкой. Эта ошибка может быть существенно меньше, если мы решим, для какого света эту матрицу следует оптимизировать. То есть матрица, которая лучше всего подходит для дневного света, будет отличаться от матрицы для вольфрама. Это может показаться несколько странным, поскольку пространство XYZ просто представляет отклики конуса и не имеет белой точки, и действительно, камера Лютера-Айвса может иметь одинаковую матрицу для всех типов света.Однако, когда решения нет, при наилучшем приближении необходимо учитывать свет (источник света).
ggbutcher:Это противоречит моему опыту. Приведенные выше сценические изображения иллюстрируют то, что я испытал между матричными профилями и профилями камеры LUT; изображение профиля LUT имеет менее насыщенный синий цвет. Это не отсечение, это сжатие гаммы на основе выбранного способа рендеринга.
Действительно, в данном случае вы правы, хотя я не имел в виду этот конкретный пример, когда делал это общее заявление, которое в значительной степени цитируется из Андерса, чего бы оно ни стоило.Я упомянул только об отсечении, поскольку вы упомянули о проблеме цветов вне гаммы с матричными профилями, что подразумевает отсечение. Андерс упоминал в нескольких местах, что LUT могут делать спад / сжатие различных цветов для более приятного эффекта, и именно так он разработал свой внешний вид по умолчанию в Dcamprof. Это то, что вы видите на примере синего светодиода.
ggbutcher:Я не включил эту ссылку в исходный пост, потому что он использует Adobe Flash, это страница урока из курса цифровой фотографии Марка Левоя в Стэнфорде, и это просто лучшая иллюстрация поведения намерения рендеринга, с которым я когда-либо сталкивался:
Это довольно изящная демонстрация, пришлось использовать Internet Explorer, чтобы увидеть приложение Flash, но какое отношение имеет отображение гаммы к профилям камеры? Они не выполняют отображение гаммы.Они могут выполнять сжатие гаммы, но не отображать гамму, и они не предлагают сжатие гаммы по умолчанию и, возможно, не должны, в идеале мы должны иметь интеллектуальное сжатие / преобразование гаммы с помощью необработанного конвертера в выбранное вами выходное пространство.
ggbutcher:Предполагая относительный колориметрический метод цветопередачи, с профилем матрицы, все, что может сделать намерение, — это перетащить цвет вне гаммы вдоль линии к белой точке, пока он не войдет в гамму. LUT, наблюдая за поведением сценических фотографий, предоставляет больше информации, чтобы вытащить цвета вне гаммы в более градуированный результат.
Я не совсем понимаю, что вы имеете в виду в контексте изображений в формате Raw — у камеры нет цветов вне гаммы? Отрендеренное необработанное изображение могло иметь обрезанные цвета из-за неправильного выбора обработки или из-за передержки.
Действительно, LUT могут создавать такие эффекты (сжатие, спад), но учтите, что это нелинейный эффект, в то время как профиль матрицы всегда линейен. Андерс явно пошел на все, чтобы обеспечить хорошую плавность нелинейных LUT, генерируемых Dcamprof.
Это должно быть интересно, особенно обратите внимание на ссылку об обработке глубокого блюза: https://torger.se/anders/dcamprof.html#extreme_colors
ggbutcher:Если вы используете профиль только для матрицы, вы получите отрицательные значения в крайнем диапазоне, и, если необработанный преобразователь не имеет специальной обработки для этого диапазона, он будет обрезан ровно, в худшем случае до черного, но чаще всего для простого сильно насыщенный цвет без информации о тональности. Это, пожалуй, самый большой недостаток профилей только для матрицы, когда речь идет о фотографии общего назначения.
Если вы создадите профиль LUT ICC или DNG, DCamProf будет обрабатывать эти экстремальные цвета посредством сжатия гаммы на уровне колориметрического профиля. Собственная таблица LUT коррекции цвета DCamProf будет работать только в том диапазоне, в котором матрица дает нормальный результат. За пределами допустимого диапазона матрицы становится активным стандартное сжатие гаммы. Его цель — сохранить тональность (различные тона), когда камера улавливает тональность, а не «правильные», поскольку профиль и камера в любом случае не могут быть правильными в любом колориметрическом смысле в этом диапазоне.Некоторая обрезка все равно будет иметь место, но ее можно контролировать и сохранить тональность.
Причина, по которой должно иметь место некоторое отсечение, состоит в том, чтобы иметь возможность сделать разумный «возрастающий» градиент от нейтрального до полного отсечения насыщенности. Хотя это отсечение не убивает тональность, оптимальное значение будет сохранено, если отсечения не будет. К сожалению, единственный способ добиться этого на некоторых камерах (с очень высокой чувствительностью к синему) — обесцветить весь профиль, чтобы получить «больший диапазон» для игры.Это действительно можно наблюдать в некоторых коммерческих профилях. Я не рекомендую делать это, поскольку это приводит к снижению производительности в нормальном диапазоне, но DCamProf позволяет проектировать и этот тип профиля. Пример можно найти в разделе, описывающем настраиваемую обработку темно-синего цвета.
Я сделал профили LUT из выстрелов из мишени CC24, и они ничем не лучше матричных профилей, сделанных из тех же выстрелов. Вот где я пришел к такому выводу; Надо подумать …
Это, безусловно, возможно, учитывая большое разнообразие способов создания профилей и их оценки.
ggbutcher:Я думаю, что страница Gamut Mapping Марка Левоя иллюстрирует то, что я пытаюсь передать; насколько я могу судить, все его преобразования основаны на матрице.
В контексте профилей камеры, которые не отображают гамму, возможно, было бы лучше, если бы мы просто назовем это сжатием гаммы, как это делает Андерс. Кстати, это обрабатывается другим LUT в профиле:
ggbutcher:Сначала вам нужно понять разницу между «Native-LUT» и «Export-LUT»: Lumariver Profile Designer имеет свой собственный внутренний формат LUT, который на самом деле не является простой таблицей поиска, а математической моделью, основанной на целевые измерения и параметры оптимизации.Это родной LUT. Когда профиль экспортируется как профиль DNG или ICC, этот собственный LUT выбирается для создания реальной LUT в формате, поддерживаемом профилем, это Export-LUT. Поскольку разрешение экспортируемого LUT ограничено, оно не будет точно соответствовать собственному LUT, но должно быть очень близким. В противном случае, вероятно, есть проблемы с плавностью LUT, то есть слишком крутые изгибы (чего не должно быть при настройках параметров по умолчанию).
Результат Export-LUT в основном имеет значение, когда вы создаете профиль воспроизведения, как если бы вы применили кривую тона, оператор воспроизведения тона и сжатие гаммы, в окончательной LUT будут произведены дополнительные преобразования.
- Patch Split: Reference vs Native-LUT — настройка по умолчанию, сравнивающая целевую ссылку и результат собственной LUT.
- Patch Split: Reference vs Matrix — сравнение целевого эталона с матрицей. Переключитесь между этим и «Reference vs Native-LUT», чтобы увидеть, какие улучшения делает LUT.
- Patch Split: Matrix vs Native-LUT — сравнивает результат линейной матрицы напрямую с LUT. В идеале разница должна быть довольно небольшой, так как это означает, что LUT будет гладким.
- Patch Split: Reference vs Export-LUT — сравнивает целевую ссылку с фактическим экспортированным LUT, который может не совпадать с исходным LUT на 100% из-за ограниченного разрешения. Если вы создаете профиль воспроизведения (линейная кривая, без сжатия гаммы), это представляет фактическую производительность экспортированного профиля.
- Patch Split: Matrix vs Export-LUT — сравнивает результат линейной матрицы с экспортированным LUT, может использоваться в качестве окончательной проверки работоспособности, если вам действительно нужна LUT вообще или если настройки настолько малы, что вы можете продолжить только матрица.
, и может оказаться, что прицельный выстрел из достаточно большого набора патчей даст лучшую «отдачу от денег»
Возможно, но опять же с профилями общего назначения 2.5D, Dcamprof не может в полной мере использовать цель, делая разные корректировки одних и тех же цветов с разной яркостью. Вот почему нет большого преимущества перед мишенью CC24. Я не могу найти примеры, которые Андерс привел по этому поводу только что, но где-то они есть.
ggbutcher:Спасибо, что дал мне паузу, чтобы подумать; Это явно для меня исследование ранее неизвестной концепции, и я предпочел бы, чтобы меня вызывали на ковровые тиски, позволяя заблуждению сохраняться.
Спасибо за это упражнение для мозга! Это также помогло мне лучше понять, когда я пытаюсь выразить свои мысли словами. Мне тоже нужно многому научиться. Я еще не исследовал обширные возможности настройки Dcamprof / Lumariver для разработки собственного внешнего вида LUT или даже для изменения матрицы расчетов по умолчанию.Я также не потратил столько усилий, как вы, на то, чтобы убрать SSF с моей камеры. Это очень интересно, и я хотел бы как можно больше следить за этим!
Кривые спектральной чувствительности камер
Различные производители призм линейного сканирования могут сравнивать две возможные кривые в своей рекламе и утверждать, что более крутые боковые стороны должны обеспечивать лучшую цветопередачу с большей избирательностью.
Аргументация кажется убедительной, но верна ли она? Чтобы судить об этом утверждении, необходимо взглянуть на основы.
Рис. 2. Теоретическая функция фильтра для вывода sRGB. (Предоставлено: Chromasens GmbH) Рис. 3. Кривые фильтра для хорошо подобранной характеристики фильтра. (Предоставлено: Chromasens GmbH) Рис. 4. Кривые фильтра в соответствии со стандартной моделью камеры EBU в документе TECH 3353. (Фото: Chromasens GmbH) Рис. 5. Выходной сигнал призменной камеры. (Предоставлено: Chromasens GmbH)Колориметрия, наиболее часто используемая сегодня, основана на так называемом стандартном наблюдателе CIE 1931 года. В то время кривая спектральной чувствительности для цветочувствительных рецепторов глаза была определена путем сравнительной оценки цвета. области с тремя спектральными линиями.Затем эти кривые были перенесены в систему нормальной валентности CIE. Цветовые пространства, такие как sRGB, AdobeRGB, eciRGB и CIELAB, по-прежнему определяются с использованием этой стандартной системы валентности CIE.
Каждая камера RGB предоставляет тройку цветов (R, G, B) для данного цвета. Это значение RGB является описанием представленного образца для конкретного устройства и не может быть интерпретировано без ссылки именно на эту камеру. И цвета, и цветовые интервалы всегда определяются в соответствии со стандартной системой валентности CIE.Отсюда следует, что необходимо передать в эту систему специфичные для устройства значения RGB камеры.
В 1927 году Роберт Лютер впервые сформулировал необходимые условия для того, чтобы техническое записывающее устройство могло воспроизводить визуальное поведение глаза. Это тот случай, когда кривая спектральной чувствительности, состоящая из фильтра и спектральных характеристик приемника, отличается от стандартных кривых спектральных значений только на один коэффициент k. Однако этому условию не удовлетворяет ни одна стандартная камера RGB.Причина в том, что фильтры оптимизированы в отношении выходного цветового пространства.
Например, широко используемый стандарт sRGB основан на основных цветах, типичных для мониторов на момент определения. Это гарантирует, что изображение, выводимое камерой, производит на мониторе приемлемое цветовое впечатление без преобразования.
Хорошие характеристики фильтра в промышленной среде должны максимально соответствовать обоим требованиям. Этого можно достичь, если спектральные кривые являются фундаментальными метамерами нормальных кривых спектральных значений.Это условие выполняется, если функция фильтрации может быть отображена в стандартную функцию спектрального значения невырожденной матрицей 3 × 3.
Преобразование стандартных кривых спектральных значений в кривые фильтра для общих выходных цветовых пространств обычно приводит к кривым с отрицательными компонентами, которые невозможно реализовать физически.
Фактические функции фильтра всегда представляют собой компромисс между теоретическими соображениями и практической осуществимостью.
Три примера для сравнения
Рисунок 6.Спектральный градиент черного — фильтр Metamer 1. (Предоставлено: Chromasens GmbH)Кривые на рисунках 3-5 существенно различаются крутизной наклона. Из-за используемых дихроичных фильтров кривые на рис. 5 намного круче, чем на рис. 3 и 4. Производитель камеры, представив кривые на рис. 5, утверждает, что крутизна боковых сторон обеспечивает хорошее цветовое разделение.
Ни одна из двух кривых не удовлетворяет критерию Лютера, упомянутому выше, который позволил бы правильно преобразовать значения RGB в стандартное цветовое пространство.Для какой из двух кривых это удается с меньшим количеством отклонений?
Black Metamer
Рис. 7. Спектральный градиент черного — фильтр Metamer 2. (Фото: Chromasens GmbH) Рис. 8. Спектральный градиент черного — фильтр Metamer 3. (Фото: Chromasens GmbH)За этим вопросом стоит вопрос о том, какая кривая возникает. наиболее близок к фундаментальному метамеру нормальных кривых спектрального значения. Ответить на него можно с помощью матрицы Коэна.
Это можно понимать как проектор, который проецирует фильтрующую функцию датчиков на фундаментальные метамеры стандартных функций спектральных значений.Эти функции разделены на части, которые лежат в пространстве, охваченном метамерами, и на часть, перпендикулярную к ним. Вертикальная часть называется черным метамером. Название происходит от того факта, что при исследовании метамерного поведения цветовых спектров это часть спектра, которая не способствует различению цвета наблюдателем.
При технической обработке информации о цвете черный метамер спектра датчика — это часть сигнала, которая «нарушает» отображение стандартных спектральных значений.Чем ниже эта пропорция, тем лучше трансформация.
Рисунки 6, 7 и 8 представляют собой спектральные кривые черного метамера для двух функций цветных фильтров
Кривые спектральной чувствительности 1:
Кривые спектральной чувствительности 2:
Кривые спектральной чувствительности 3:
Сигнальная составляющая мешающего черного метамера является результатом внутреннего произведения цветового спектра и спектральных кривых черного метамера.На кривой 3 это значительно больше, чем на кривых 1 и 2, особенно в критической зеленой составляющей. Эта интерференционная составляющая не может быть полностью исправлена без знания цветового спектра.
Моделирование с помощью ColorChecker
Кроме того, при воспроизведении процесса сканирования из спектров β цветовых полей n = 24 вычисляются спектральные чувствительности S датчиков соответствующих значений RGB. Предполагается освещение с характеристикой D50.
Значения RGB, полученные таким образом, преобразуются в значения XYZ с матрицей 3 × 3, M. Статистика различий в измерении цветового расстояния ∆E определяется в соответствии с CIE2000. Матрица M определяется методом наименьших квадратов.
ColorCheckerЭта статистика ошибок относится к двум вариантам сенсора:
Как и ожидалось, значения RGB, полученные с помощью кривых фильтра 1, могут быть перенесены в стандартное цветовое пространство с наименьшими отклонениями. Хотя кривые 2 все еще приемлемы, высокая максимальная погрешность кривой 3 является критической.
Обзор
Отклонения ∆E можно значительно уменьшить с помощью нелинейных методов. Однако это всегда также приводит к большей чувствительности преобразования к небольшим отклонениям параметров процесса.
Однако следует также упомянуть, что эта возможность преобразования является только одним аспектом конструкции фильтра. При сравнении кривых видно, что площади под кривыми 2 и 3 значительно больше. Это означает, что доступный свет используется лучше, что может привести к лучшему соотношению сигнал / шум.
Эта статья написана Бернхардом Фреем, менеджером проекта и экспертом по цвету, Chromasens GmbH (Констанц, Германия). Для получения дополнительной информации свяжитесь с доктором Фреем по адресу Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра. или посетите здесь .
Photonics & Imaging Technology Magazine
Эта статья впервые появилась в марте 2020 года в журнале Photonics & Imaging Technology Magazine.
Читать статьи в этом выпуске здесь.
Другие статьи из архивов читайте здесь.
ПОДПИСАТЬСЯ
цветов — Как спектральная чувствительность разных сенсоров влияет на полученную фотографию?
Спектральная чувствительность комбинации сенсора и объектива в большей степени влияет на объем обработки изображения перед созданием файла jpeg или raw. Сегодняшняя камера обрабатывает файл в соответствии с вашим желанием с учетом профиля камеры (зависит от марки).Поэтому производители камер измеряют спектральную чувствительность своих датчиков и создают эти профили. Мы можем сделать то же самое, если у нас есть доступ к некоторым хорошо откалиброванным техническим инструментам и возможности программирования для создания профилей ICC.
Просматривая ваши графики, я вижу, что у вас может быть некоторая неверная информация. Сначала давайте начнем с относительного человеческого зрения:
Итак, это относительные измеренные длины волн и интенсивности, которые мы можем видеть. Некоторые могут заметить, что я удалил отрицательный зеленый узел и нанес все относительное для сравнения.
Теперь сравним это со спектральной чувствительностью камеры с датчиком изображения CMOS. В этом случае Canon XTI, который я измерил, назад:
.
Итак, люди видят иначе, чем камеры. Это различие называется условием Лютера-Айвса, и в результате в изображениях и их обработке появляется много шума, чтобы компенсировать нашу неспособность изготовить датчики, которые могут удовлетворить это условие. Результат в цвете — метамеризм. Потому что наше человеческое RGB-зрение по своей природе видит лучше и иначе, чем датчики камеры, и мы встроили автоматический баланс белого, называемый хроматической адаптацией.Камеры просто не могут очень хорошо имитировать то, что создал Бог.
Итак, чтобы получить спектральную чувствительность камеры, вам понадобится специальное оборудование. Есть несколько способов сделать это, поэтому я опишу свой метод, и другие могут поддержать свои личные предпочтения: 1. Радиометр или монохрометр Telespectro (я предпочитаю монохрометр) 2. Настольное крепление
Некоторая основная информация: Для данных спектральной чувствительности предполагается три входных канала. Спектральные данные для сцены, принятой для белого и освещенности «идеально отражающие диффузоры», должны быть абсолютными или нормализованными с использованием одного и того же коэффициента.Измерены спектральные чувствительности камеры.
Основные цвета RGB для балансировки белого обучающих цветов должны быть нормализованы так, чтобы равные количества основных цветов, объединенные вместе, давали равные значения CIE XYZ. Основные цвета могут быть выбраны для получения соответствующих цветов (имитирующие хроматическую адаптацию), но это не требуется. Затем мы вычисляем матрицу балансировки белого из сцены, принятой для белого XYZ, до целевого цветового пространства, принятого для белого XYZ. Затем просто вычислите значения линейной цели.Затем вычислите линейный отклик камеры на принятые множители белого и канала баланса белого. После этого мы вычисляем сбалансированные по белому линейные сигналы отклика камеры для обучающих цветов. Затем все, что необходимо, — это вычислить матрицу преобразования цвета из сбалансированной по белому линейной камеры RGB в линейную RGB-камеру назначения на основе ошибки наименьших квадратов в целевом цветовом пространстве с нелинейностью параметра гаммы.
Нанося значения в XYZ, мы видим довольно большую разницу между RGB камерой и человеческим зрением.
Итак, какие выводы мы можем сделать из этого, чтобы сделать наше искусство как можно лучше? Как и все в искусстве, это зависит от целей вашего конкретного проекта или желаний художника. Если цель состоит в том, чтобы воспроизвести человеческое зрение, забудьте об этом. Но если у вас есть особая потребность в калибровке камеры для точной фотосъемки и рендеринга, то это может быть возможно с помощью этого метода, в зависимости от точной спектральной чувствительности вашей конкретной камеры, объектива и источников света.На графиках показан датчик CMOS, чувствительность которого будет сильно отличаться от чувствительности матрицы CCD, представленной выше. Сегодня большинство хороших фотоаппаратов — это КМОП-матрицы, поэтому технология ПЗС превратится в сканеры.
Итак, подводя итог, вы не можете преодолеть проблемы спектральной чувствительности за пределами датчика, но вы можете несколько изменить сигнал, чтобы компенсировать набор факторов, которые остаются статичными в течение необходимого вам времени. Это может сработать для некоторых художественных фотографий и фотографий продуктов, чтобы сократить время цветокоррекции и обеспечить более эффективные рабочие процессы для крупных производителей каталогов.Но метамерные эффекты разницы между продуктами с учетом их красителей и пигментов могут по-прежнему приводить к увеличению времени на корректировку цвета изображений для соответствия.
Надеюсь, эта информация окажется полезной.
.