 По сравнению с фотокамерами прошлых лет, у цифровых камер очень мало механических узлов. Их заменили электронные компоненты. Остался неизменным только принцип получения фотографии, который заключается в переносе видимого изображения на какой-либо физический носитель. У старых фотокамер это была светочувствительная плёнка, а у современных цифровых устройств – матрица фотоаппарата. Статья может быть полезна тем, кто интересуется фотографией не только, как искусством, но и хочет понять некоторые конструктивные особенности фотокамер и принципы получения изображения.
По сравнению с фотокамерами прошлых лет, у цифровых камер очень мало механических узлов. Их заменили электронные компоненты. Остался неизменным только принцип получения фотографии, который заключается в переносе видимого изображения на какой-либо физический носитель. У старых фотокамер это была светочувствительная плёнка, а у современных цифровых устройств – матрица фотоаппарата. Статья может быть полезна тем, кто интересуется фотографией не только, как искусством, но и хочет понять некоторые конструктивные особенности фотокамер и принципы получения изображения.
Формирование изображения в фотокамере
 Матрица, фотодатчик, сенсор – это названия одного и того же устройства, входящего в конструкцию фотоаппарата и являющегося его основным элементом. По конструкции матрица это прямоугольная пластинка разных размеров из химически чистого кремния, на которой методом вакуумного напыления организовано большое количество n-p переходов. Эти переходы представляют собой светочувствительные фотодиоды или фототранзисторы. Таким образом, матрица это интегральная микросхема с несколькими миллионами светочувствительных элементов. Когда на фотодиод попадет свет, он преобразуется в электрический сигнал. В зависимости от объекта съёмки количество света может быть большим или меньшим. Электрические потенциалы с матрицы считываются построчно или поэлементно, затем обрабатываются процессором.
Матрица, фотодатчик, сенсор – это названия одного и того же устройства, входящего в конструкцию фотоаппарата и являющегося его основным элементом. По конструкции матрица это прямоугольная пластинка разных размеров из химически чистого кремния, на которой методом вакуумного напыления организовано большое количество n-p переходов. Эти переходы представляют собой светочувствительные фотодиоды или фототранзисторы. Таким образом, матрица это интегральная микросхема с несколькими миллионами светочувствительных элементов. Когда на фотодиод попадет свет, он преобразуется в электрический сигнал. В зависимости от объекта съёмки количество света может быть большим или меньшим. Электрические потенциалы с матрицы считываются построчно или поэлементно, затем обрабатываются процессором.
Типы матриц
 Матрицы фотоаппаратов могут быть изготовлены по разным технологиям и иметь разные размеры. В фотокамерах применяются следующие виды сенсоров:
Матрицы фотоаппаратов могут быть изготовлены по разным технологиям и иметь разные размеры. В фотокамерах применяются следующие виды сенсоров:
- ПЗС;
- КМОП;
- Live-MOS;
- 3 CCD.
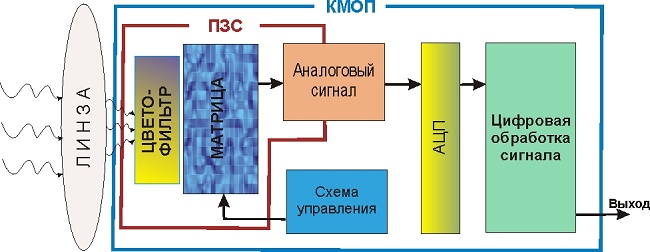
ПЗС матрица состоит из полупроводниковых фотодиодов, а считывание электрических потенциалов осуществляется по горизонтальным строкам. Полевые структуры КМОП намного экономичнее, но за счёт электронных преобразований при считывании, качество картинки несколько хуже, чем на матрице ПЗС. Live-MOS является усовершенствованным КМОП сенсором. Его отличают повышенная чувствительность и быстрая передача сигналов. В матрице используется малошумящий усилитель и низковольтное питание. Это разработка Панасоник, которая применяется в фотоаппаратах этой компании, а так же в камерах Leica и Olympus. 3CCD или трёхматричный сенсор обеспечивает высококачественную цветопередачу с малым уровнем шумов. Разделение цветов осуществляется дихроидной призмой маленького размера с записью каждого из основных цветов на отдельную матрицу. К недостаткам системы 3CCD относятся большие размеры устройства и высокая цена камеры.
Важные характеристики матриц
 Полупроводниковая матрица цифрового фотоаппарата имеет ряд основных характеристик, от которых зависит качество изображения. Это следующие параметры:
Полупроводниковая матрица цифрового фотоаппарата имеет ряд основных характеристик, от которых зависит качество изображения. Это следующие параметры:
- Размер
- Количество пикселей
- Чувствительность
- Динамический диапазон
- Соотношение сигнал/шум
К дополнительным характеристикам относится напряжение питания и энергопотребление. Они не влияют на картинку и в описании фотоаппарата обычно не указываются.
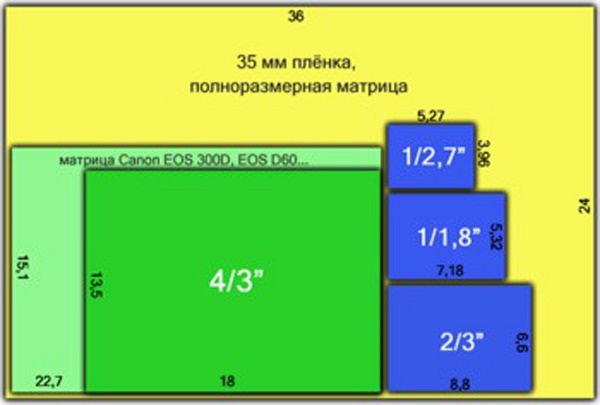
Кроп фактор
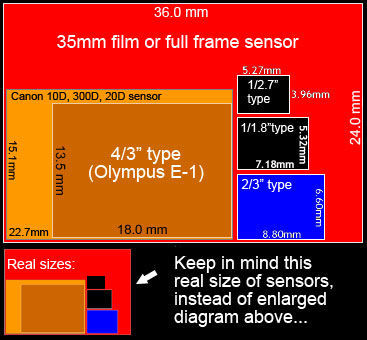
 Это главный параметр полупроводниковой матрицы. От него, и в меньшей степени от количества пикселей, зависят важнейшие характеристики изображения, снятого камерой. Кроп фактор это цифра, показывающая, на сколько реальная матрица меньше полнокадрового стандарта. Full Frame – это размер матрицы 24 Х 36 мм. Такими сенсорами оснащаются самые дорогие и профессиональные фотоаппараты. Этот размер соответствует кадру на стандартной фотоплёнке. Для снижения стоимости фототехники, а так же для производства компактных и лёгких любительских фотокамер «мыльниц» применяются матрицы маленького размера.
Это главный параметр полупроводниковой матрицы. От него, и в меньшей степени от количества пикселей, зависят важнейшие характеристики изображения, снятого камерой. Кроп фактор это цифра, показывающая, на сколько реальная матрица меньше полнокадрового стандарта. Full Frame – это размер матрицы 24 Х 36 мм. Такими сенсорами оснащаются самые дорогие и профессиональные фотоаппараты. Этот размер соответствует кадру на стандартной фотоплёнке. Для снижения стоимости фототехники, а так же для производства компактных и лёгких любительских фотокамер «мыльниц» применяются матрицы маленького размера.
Существует общепринятый ряд форматов светочувствительных матриц. За полнокадровыми матрицами следует размер 16 Х 24 мм, что соответствует кроп-фактору 1,5. Самыми маленькими сенсорами, применяемыми в недорогих фотоаппаратах, являются матрицы с размерами 4,5 Х 3,4 мм. Это кроп фактор 7,6. Они применяются в дешёвых моделях фотокамер, где высокое качество кадра не требуется.
Разрешение, мегапиксели
 Количеством мегапикселей обычно хвастаются продавцы фотоаппаратов, когда предлагают товар начинающим фотолюбителям. К этому параметру следует относиться с осторожностью. Кадр цифрового фотоаппарата состоит из миниатюрных полупроводниковых элементов. Каждый пиксель это сверхминиатюрный фотодиод или фототранзистор. Теоретически получается, что чем больше пикселей, тем выше качество изображения, точнее проработка мелких деталей или разрешение. На практике большое количество пикселей повышает качество изображения только на матрицах большого размера.
Количеством мегапикселей обычно хвастаются продавцы фотоаппаратов, когда предлагают товар начинающим фотолюбителям. К этому параметру следует относиться с осторожностью. Кадр цифрового фотоаппарата состоит из миниатюрных полупроводниковых элементов. Каждый пиксель это сверхминиатюрный фотодиод или фототранзистор. Теоретически получается, что чем больше пикселей, тем выше качество изображения, точнее проработка мелких деталей или разрешение. На практике большое количество пикселей повышает качество изображения только на матрицах большого размера.
Если размер кристалла небольшой, а изготовитель фотоаппаратов сумел разместить на нём большое количество светочувствительных элементов, то качество изображения будет невысоким. Очень важным для матрицы является не только размер отдельных фотоэлементов, но и расстояние между ними. Маленькие расстояния приводят к перегреву матрицы и возрастанию цифрового шума, который характеризуется цветными точками по всему изображению. Кроме того, при сильном диафрагмировании объектива фотокамеры, за счёт дифракции, вокруг элементов изображения будет появляться цветовая окантовка. Поэтому кадр, снятый на фотоаппарате с матрицей 5,4 Х 4,0 мм и 16 Мп, будет гораздо хуже снимка, полученного на камере с размерами матрицы 8,8 Х 6,6 мм и 10 Мп. Считается, что, в камерах, превышение числа мегапикселей свыше 25 будет излишним. Отчасти это связано с разрешением принтеров для фотопечати, когда самые продвинутые модели печатают фотографии с разрешением 9 600 Х 2 400 точек, что соответствует 23,4 мегапикселей.
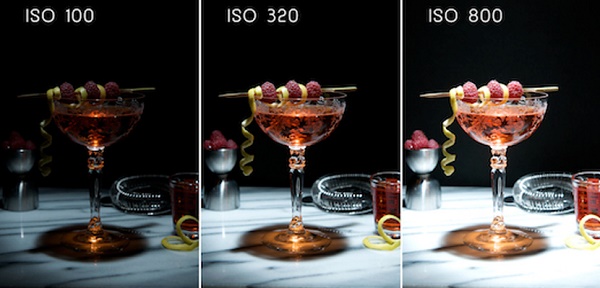
Светочувствительность
 Этот параметр в цифровых фотокамерах является относительной величиной. Кремниевая пластина со светочувствительными элементами имеет постоянную чувствительность. Всё дело в уровнях сигнала, которые поступают с фотодиодов для дальнейшего преобразования. Если на сенсор фотоаппарата поступает мало света, то электрический сигнал с него будет слабым и фотография будет тёмной. Для того чтобы сделать изображение более светлым слабый сигнал можно усилить. Изменяемый коэффициент усиления и является чувствительностью фотоаппарата. Для удобства фотографов чувствительность матрицы выражается в тех же единицах, что и у западного стандарта на фотоматериалы ASA. Соотношение чувствительности ISO и отечественных фотоплёнок выглядит следующим образом:
Этот параметр в цифровых фотокамерах является относительной величиной. Кремниевая пластина со светочувствительными элементами имеет постоянную чувствительность. Всё дело в уровнях сигнала, которые поступают с фотодиодов для дальнейшего преобразования. Если на сенсор фотоаппарата поступает мало света, то электрический сигнал с него будет слабым и фотография будет тёмной. Для того чтобы сделать изображение более светлым слабый сигнал можно усилить. Изменяемый коэффициент усиления и является чувствительностью фотоаппарата. Для удобства фотографов чувствительность матрицы выражается в тех же единицах, что и у западного стандарта на фотоматериалы ASA. Соотношение чувствительности ISO и отечественных фотоплёнок выглядит следующим образом:
- 50 – 45;
- 64 – 65;
- 100 – 90;
- 160 – 130;
- 320 – 250.
В левой графе величина чувствительности фотоаппарата, а в правой чувствительность фотоплёнки по ГОСТ.
Отношение сигнал/шум
 Мелкие цветные точки на изображении возникают от разных причин. Прежде всего, сама матрица даже при отсутствии засветки будет выдавать слабый электрический потенциал. Это и есть шум. Чтобы он не влиял на изображение, уровень полезного сигнала должен намного превышать уровень шума. Шумовые характеристики матрицы повышаются с уменьшением размера пикселя и расстояния между отдельными точками. Поэтому самой некачественной картинкой будет та, которая получена на маленьком сенсоре с большим количеством мегапикселей. Шум фотокамеры заметно возрастает при увеличении коэффициента усиления или чувствительности. Поэтому, если это возможно, рекомендуется снимать на минимальной чувствительности. Отрицательно влияет на качество изображения нагрев матрицы фотоаппарата. Это происходит, когда она постоянно работает, выводя изображение на дисплей. Профессионалы стараются работать с оптическим видоискателем фотокамеры. В этом случае питание на матрицу подаётся только на очень короткое время, и она не успевает нагреться.
Мелкие цветные точки на изображении возникают от разных причин. Прежде всего, сама матрица даже при отсутствии засветки будет выдавать слабый электрический потенциал. Это и есть шум. Чтобы он не влиял на изображение, уровень полезного сигнала должен намного превышать уровень шума. Шумовые характеристики матрицы повышаются с уменьшением размера пикселя и расстояния между отдельными точками. Поэтому самой некачественной картинкой будет та, которая получена на маленьком сенсоре с большим количеством мегапикселей. Шум фотокамеры заметно возрастает при увеличении коэффициента усиления или чувствительности. Поэтому, если это возможно, рекомендуется снимать на минимальной чувствительности. Отрицательно влияет на качество изображения нагрев матрицы фотоаппарата. Это происходит, когда она постоянно работает, выводя изображение на дисплей. Профессионалы стараются работать с оптическим видоискателем фотокамеры. В этом случае питание на матрицу подаётся только на очень короткое время, и она не успевает нагреться.
Динамический диапазон

Этот параметр определяется промежутком между минимальным и максимальным значением экспозиции, которые отчётливо видны на снимке. Если у фотоаппарата указан динамический диапазон 8 ступеней или EV, то на снимке будут видны объекты, отличающиеся по яркости в 256 (28) раз. Все предметы, яркость которых выше, получатся совершенно белыми. Нижний порог определяется уровнем шумов самой матрицы, а верхний максимальным электрическим зарядом фотодиода.
Какой фотоаппарат выбрать
 При желании снимать всё подряд, не задумываясь о высоком качестве снимка, можно приобрести любой фотоаппарат типа компакт или «мыльница». Отсутствие ручных режимов, большое количество сюжетных программ и фокусировка на лица, делает такой фотоаппарат простым в обращении и удобным для бытового использования. Для получения качественных снимков подойдёт недорогой фотоаппарат с матрицей большего размера и с возможностью ручной установки некоторых параметров съёмки. Ещё больше возможностей предоставляет пользователю беззеркальная камера «суперзум». Обладая небольшими размерами, она позволяет снимать интересные сюжеты на большом удалении от объекта съёмки, поэтому подойдёт для туристов и путешественников. Самые качественные снимки получаются с помощью зеркальной камеры, хотя её применение ограничивается большими размерами и весом. Если Вы хотите узнать все нюансы выбора фотокамеры, наши эксперты подготовили подробные инструкции в статье как выбрать фотоаппарат.
При желании снимать всё подряд, не задумываясь о высоком качестве снимка, можно приобрести любой фотоаппарат типа компакт или «мыльница». Отсутствие ручных режимов, большое количество сюжетных программ и фокусировка на лица, делает такой фотоаппарат простым в обращении и удобным для бытового использования. Для получения качественных снимков подойдёт недорогой фотоаппарат с матрицей большего размера и с возможностью ручной установки некоторых параметров съёмки. Ещё больше возможностей предоставляет пользователю беззеркальная камера «суперзум». Обладая небольшими размерами, она позволяет снимать интересные сюжеты на большом удалении от объекта съёмки, поэтому подойдёт для туристов и путешественников. Самые качественные снимки получаются с помощью зеркальной камеры, хотя её применение ограничивается большими размерами и весом. Если Вы хотите узнать все нюансы выбора фотокамеры, наши эксперты подготовили подробные инструкции в статье как выбрать фотоаппарат.
Итоги
При выборе фотоаппарата следует сначала ориентироваться на размер матрицы. Не стоит гнаться за большим количеством точек на изображении. 12-16 Мп более чем достаточно для получения и печати фотографий хорошего качества. Цифровой зум для камеры не слишком важен, так как он только позволяет растянуть центральную часть изображения на весь экран с ухудшением качества. Многие параметры не указываются в спецификации на фотоаппарат, поэтому перед выбором модели неплохо почитать отзывы фотолюбителей на специальных сайтах.
От редакции сайта Vt-tech.eu
Автор данной статьи — Владимир Медведев. Статья была опубликована на личном сайте автора по адресу:
vladimirmedvedev.com/dpi.html
Однако, автор решил полностью переделать сайт и статья пропала.
Статья очень хорошо и доступно раскрывает тему дифракции при высоких значениях диафрагмы, поэтому редакция сайта Vt-Tech никак не могла пройти мимо. Мы извлекли статью из архивов кэширующих сайтов и выложили здесь.
При экспорте статьи немного пострадали картинки: не все изображения из первоначальной статьи доступны.
Надеемся, что автор статьи не будет возражать против размещения её здесь.
Кто здесь
Эту таблицу я сделал уже много лет назад, для наглядного сравнения цифровых фотоаппаратов. В те годы было много путаницы даже с понятием «кропа» и «полного формата», не говоря уже про компактные и среднеформатные аппараты. Скудная информация была разбросана по многочисленным сайтам производителей фототехники, и сравнить камеры наглядно было практически невозможно. Всё это вводило в заблуждение многих фотолюбителей, разжигая яростные споры на профильных форумах.
Чтобы как-то упорядочить ситуацию и привести к одному знаменателю любые камеры — от мыльниц до среднеформатных камер, я решил использовать понятие плотности пикселей — DPI (хотя, возможно, будет правильней сказать ppi). Почему я выбрал именно этот параметр, который раньше нигде не использовался для этого? Просто потому, что имевшаяся в открытом доступе информация, позволяла рассчитывать его идеально точно, без погрешностей. Зная длину и ширину матрицы, а также количество пикселей, я мог без труда, абсолютно точно рассчитать их плотность. В качестве бонуса, понятие плотности пикселей, позволило сравнить матрицу любого размера с разрешением сканов с плёнки (DPI цифрового фотоаппарата и установленное DPI во время сканирования — по сути, одно и то же).
Удобная в использовании, наглядная таблица, позволила двигаться дальше, по пути познания технических характеристик матриц, и, со временем, обросла массой дополнительных «полезностей». Сегодня в таблице собраны самые разные параметры, имеющие отношение к матрицам цифровых фотоаппаратов. Это и размер пикселя, и точный кроп-фактор, и площадь матрицы, и дифракционное ограничение диафрагмы. С помощью этой таблицы можно легко отслеживать тренды развития фототехники, прогнозировать грядущие изменения или просто выбирать камеру.
Разобраться в многочисленных параметрах таблицы сходу не так просто. Помочь фотографу в этом должны специальные статьи, сопровождающие таблицу, раскрывающие её особый смысл.
Приятного чтения!
Часть первая. Увеличивает ли кроп-фактор способность объективов «приближать»?
Поскольку я занимаюсь фотографией дикой природы, часто бывает просто невозможно подойти ближе к объекту съёмки (из-за риска испугать животное или птицу). И тут во всесь рост встаёт проблема нехватки фокусного расстояния объективов (говоря простым языком — способности оптики «приближать удалённые объекты»). На заре цифровой фотографии, было крайне распространено мнение, что камеры с «кропнутой» матрицей увеличивают фокусное расстояние объективов в кроп раз. Тут я постараюсь объяснить, почему неправильно так думать.
Сейчас у меня есть две камеры. Одна полноформатная — Canon EOS 5D Mark II, вторая с кроп-фактором 1,6х — Canon EOS 20D. Кроп-фактор 1,6, означает, что диагональ матрицы 20D в 1,6 раза меньше, чем диагональ матрицы 5D MarK II. 43mm разделить на 27mm равно 1,6.

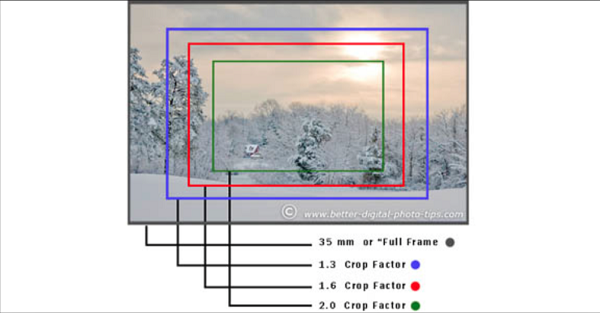
С кроп-фактором разобрались. Матрица уменьшилась. Но оптика то осталась прежней. Объектив, например, 300мм подходит как к 20D, так и к 5D Mark II. Что будет, если один и тот же кадр снять на 5D Mk II и на 20D? Самая наглядная и точная метафора — взять большой напечатанный кадр, и вырезать из него середину ножницами. Какая разница, резать матрицу или уже готовый кадр? Вот так:

Конечно, на вырезанном кадре птица выглядит крупнее. Часто, начинающими фотографами, это свойство кропа ошибочно воспринимается как плюс. Но на самом деле, плюсом вовсе не является. Зачем спешить, и «вырезать кадр» до съёмки? А если птица подлетит ближе, или нам захочется вырезать не середину, а край снимка? На полноформатной матрице мы можем резать как угодно, а можем вообще не резать. А вот кроп вариантов уже не оставляет. Вылезшие за край кадра крылья уже не вернуть, и потенциально хороший снимок отправляется в корзину.

примеры основных кроп-факторов: 1.3х, 1.6х и 2х
Спорить, что лучше, кроп или полный формат я тут не стану. Кроп может быть дешевле или быстрее. Тут у каждого своё решение. Вместо ненужных споров, предлагаю ответить на вопрос, какая характеристика камеры может по-настоящему способствовать качественному приближению? И ответ прост — плотность пикселей (столбик dpi в таблице). Для того, чтобы понять, почему это так, давайте рассмотрим ещё один пример из жизни. В этот раз, для удобства, возьмём две полноформатные камеры — 5D и 5D Mark II. Особо подчеркну, что для конечного результата совершенно не важно, полный формат у нас или кроп, тут играет роль только один параметр — плотность пикселей. У 5D это 3101 dpi, у 5D Mark II — 3955 dpi.
Представьте сафари: яркий солнечный день, низкая чувствительность ISO, отличная оптика. И вдруг мы видим дикого леопарда в 100 метрах от нас. Делаем снимок, и зверь скрывается. 100 метров — это далеко. Для того, чтобы кадр хорошо смотрелся, нам волей-неволей придётся сильно кадрировать, оставив 1/10 от полного кадра (для простоты подсчёта). Математика подсказывает, что кадр с камеры 5D (12мп) после кадрирования будет состоять из 1,2мп (12 разделить на 10), что очень мало и не годится для качественной печати. А вот снимок с 5D MII (21мп) будет состоять из 2,1 мп, что уже значительно лучше! И я ещё раз хочу подчеркнуть — совершенно не важно, кроп у нас, или полный формат. 20D, у которой плотность 3955dpi (как и у 5D Mark II), аналогичный кадр, в тех-же самых условиях, тоже состоял бы из 2,1 мп. Несмотря на то, что матрица там всего 8 мегапикселей. Тут играет роль только плотность пикселей.
Леопарда снять одновременно с двух камер не представляется возможным, поэтому я попробовал тест попроще, чтобы наглядно показать разницу от плотности пикселей. Два тестовых кадра, были сняты со штатива, с одинакового расстояния, с одинаковой оптики, с одинаковым фокусным расстоянием:

полный кадр выглядел так
при очень сильном приближении становится видна разница
Это не сравнение 450D против 1D Mark III. Это сравнение 3514 dpi против 4888 dpi. В этих условиях, аналогичный результат будет на любой другой паре камер с подобной плотностью пикселей. Просто когда я писал статью, у меня были именно эти две камеры, вот и всё.
Ps:
- Тесты проводились в хороших условиях, и рассматривались под большим увеличением. В реальной жизни, скорее всего, разница будет заметна ещё меньше. Стоит оно того или нет, решать только вам.
- Разумеется, качество 21 мегапикселя 5D Mark II, в сравнении с 12 мегапикселями 5D, будет заметно не только при сильном кадрировании. Надеюсь, это и так всем понятно.
Часть вторая. Меньше пиксель — больше шум
Из первой части можно сделать вывод — давайте наращивать плотность пикселей, что бы картинка была лучше. Но не всё так просто. Чем больше плотность пикселей, тем меньше площадь каждого конкретного пикселя (такой столбик тоже есть в таблице). Чем меньше площадь пикселя, тем меньше фотонов света он улавливает. Фотоны — это полезный сигнал. Чем их меньше, тем хуже соотношение сигнал/шум, тем хуже чувствительность камеры.
Скажу просто — камеры, которые мне приходилось тестировать, с размером пикселя менее 6 микрон, имеют плохую чувствительность и более высокий шум. Это моё мнение, мой опыт. Пока что никаких исключений в этом правиле я не видел. Возможно, когда-нибудь, технологии позволят делать новые камеры более чувствительными, но пока так. Возникает вопрос, что выбрать? Плотность пикселей или чувствительность? Тут всем придётся искать свой собственный ответ. Кому интересно моё мнение, смотрите следующие два абзаца, но… никому его не навязываю. 🙂
Я проанализировал свои снимки, за последние несколько лет, размышляя, может ли большая плотность пикселей увеличить качество моих снимков. Результат оказался очень неожиданным: снимков, качество которых можно улучшить за счёт плотности пикселей, оказалось крайне мало. Помимо моих кривых рук, виной тому стали многие естественные факторы — шумы, шевелёнка, качество оптики, «воздух», не точный АФ и пр. Причём, 90% снимков, которые можно было бы улучшить повышенной плотностью пикселей, в улучшении и не нуждались — все они и так обладали достаточным качеством.
Показательно, что большая часть некачественных фотографий страдала из-за недостатка чувствительности. Шевелёнка и шумы мне, как фотографу дикой природы, сейчас мешают гораздо сильнее. 16-25 мегапикселей на полном формате — мой идеал на сегодняшний день.
Также не стоит забывать про ДД — динамический диапазон, который очень тесно связан с шумами, т.к. они ограничивают его в тенях. Меньше пиксель — меньше и ДД. Выводы тут каждый сам для себя сделает. А тех, кому важнее окажется плотность пикселей, я хочу предупредить об ещё одном коварном враге, который будет вечно подстерегать Вас, и от которого Вам не скрыться. По крайней мере в этой Вселенной. Это дифракция…
Часть третья. Дифракция в фотографии. Теория
Для этой части моей статьи все рисунки взяты иззамечательного учебного пособия про дифракцию:
Tutorials: difraction & photography. Очень рекомендую
его всем, кто хочет глубоко разобраться в этой теме.
В этой части матрица ни причём, а отдуваться всё равно приходится. За физику. Какое отношение имеет дифракция к матрице цифрового фотоаппарата? Никакого. Но давайте рассмотрим, что же мы имеем ввиду под словом дифракция, когда говорим о головной боли фотографов?
Если не вдаваться в подробности, то дифракция — это физическое явление, которое мешает нам сильно закрывать диафрагму, снижая качество получаемого изображения.
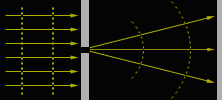
Если рассмотреть причины дифракции, то мы увидим, что появляется она при прохождении света через диафрагму. После прохождения диафрагмы, лучи идут уже не столь прямо, как нам хотелось бы, а немного «расслаиваются», расходятся в стороны. В результате каждый лучик образует на поверхности матрицы не просто точку, а «кружок и круги по воде» — дифракционные кольца, или, как это ещё называют диск Эри (по фамилии учёного, английского астронома — George Biddell Airy):
Разумеется, что, в отличие от хорошо сфокусированной точки, подобные диски могут залезть на соседние пиксели, если те расположены достаточно плотно. А когда они лезут на соседние пиксели, мы прощаемся с хорошей резкостью.
Давайте рассмотрим это явление на примере. Зная размер пикселей, мы без труда построим сетку, обозначающую границы пикселей (пунктиром). Далее по формуле мы вычисляем диаметр диска Эри и для упрощения представляем его в виде пятна света. И попробуем наложить диски Эри, характерные для самых распространённых диафрагм, на нашу сетку. Для примера я взял размер пикселя камеры 5D MarkII, а значения диафрагм указаны под каждым рисунком:
Как вы видите, при неизменной сетке пикселей кружок Эри растёт. При f/16 он уже значительно залезает на соседние пиксели, что в реальной жизни будет размывать картинку, не давая нам попиксельной резкости. А при f/22 этот диск занимает почти всю площадь 9 пикселей!
Зная размеры этого кружка, я могу рассчитать максимально закрытую диафрагму, после которой дальнейшее закрытие, будет ухудшать фотографию. Этот параметр мой коллега с the-digital-picture.com называет DLA (diffraction limited aperture), что соответствует русскому термину ДОД (дифракционное ограничение диафрагмы). Однако мои расчёты числового значения этого параметра несколько отличаются от вычислений автора вышеуказанного сайта. Например, в своей формуле он, видимо, каким-то образом учитывает и размер всей матрицы (в частности, при равной плотности пикселей, значения DLA 40D (f/9.3) и 1D MarkIV (f/9.1) различаются). Это, конечно же, не может быть верным, когда мы говорим о дифракции на уровне пикселей. Впрочем, наши результаты не сильно расходятся, так что разницей можно принебречь. К тому же, в силу сочетания очень многих факторов (нечеткость границ диска, сложная структура ячеек матрицы и пр.), невозможно с абсолютной точностью назвать величину DLA, после которой начинает наблюдаться деградация изображения.
Итак, давайте посмотрим, как это работает. Для 5D MarkII (как и для 20D), DLA составляет f/10,8, что очень близко к рисунку выше с подписью f/11. В то же время, для Canon 1D (всего 4 mp, — самые крупные ячейки матрицы среди всех камер Canon), этот параметр составляет f/19,1. Давайте закроем диафрагму до f/16, и посмотрим, как будет выглядеть диск Эри, спроецированный на сетку пикселей 1D и на сетку 5D MarkII (или 1Ds MarkIII или 20D):
Как видно из этого примера, что позволено Юпитеру, не позволено быку. При съёмке на 1D мы легко можем закрыть диафрагму до f/16, а на 5D Mark II это приведёт к снижению возможной детализации.
Часть четвёртая. Дифракция в фотографии. Практика
Выше была лишь сухая теория. Она абсолютно верна, но не учитывает того, что оптика очень часто не способна выдать достаточной детализации, на диафрагмах уже DLA. Так как же дело обстоит на практике?
Действительно, оптика не всегда даёт качество, которое позволило бы нам видеть попиксельную резкость. Более того, как мы знаем, качество изображения растёт по мере закрытия диафрагмы. Из-за этого у качественной оптики мы можем заметить ухудшение качества из-за дифракции на диафрагмах близких к DLA, а вот у плохих это может произойти на значительно позже. Однако, если ухудшение наступает на одно или даже два значения диафрагмы уже DLA, это означает, что матрица камеры с этим объективом никогда не получает достаточно детаелй. Т.е. попиксельной резкости там не будет никогда, иначе дифракцию мы бы смогли заметить на уровне числового значения DLA.
Что же мы можем наблюдать на камерах с большой плотностью пикселей? Для примера возьмём новую (на момент написания этих строк) камеру Canon EOS 7D. DLA там составляет f/7,2. Что это значит? Это значит, что 7D сможет выдать попиксельную детализацию только на диафрагмах менее 7,2. Возьмём хорошую оптику и посмотрим на результат. Для этого обратимся за помощью к ресурсу The Digital Picture. Там мы можем найти снимок специальной тестовой таблицы на камеру 7D с использованием хорошей оптики (Canon EF 200mm f/2.0L IS USM). Сравним кадр, сделанный при диафрагме 5,6 и 8. Как мы видим, резкость незначительно ухудшается — теория работает! Теперь сравним 5,6 и 11 — вот тут уже идёт заметное падение резкости, причём не только по центру, но даже в углах!
Весь парадокс камер с высокой плотностью пикселей, что оптике и так сложно передать значительное количество деталей, а передать значительное количество деталей на диафрагмах шире, чем f/8… боюсь это задача лишь для действительно великолепных объективов. Таких, как Canon EF 200mm f/2.0L IS USM ~ за 6000$…
В заключение, для невнимательных читателей, я хочу ещё раз подчеркнуть, что дифракция не является параметром матрицы, искажает изображение до матрицы и не зависит от марки камеры (а если и зависит, разница минимальна и я её не учитываю).
Благодарю Дмитрия (Доктор Ктулху) за помощь, оказанную в процессе редактирования текста статьи.Таблица характеристик матриц цифровых фотоаппаратов
| Модель | Произв | Тип | Mp* | Кроп-фактор | Размер пикселя (микрон) | Площадь (мм2 ) | Размер матрицы (мм) | Размер матрицы (пикселей) |
DPI | DLA** | FF*** (mp) |
| C a n o n | |||||||||||
| 1D | Kodak | CCD | 4,1 | 1.3 х | 11,6 µm | 548,2 | 28,7 x 19,1 | 2464 x 1648 | 2181 | f/19,1 | 6,4 |
| D30 | Canon | CMOS | 3,1 | 1.6 х | 10,5 µm | 342,8 | 22,7 x 15,1 | 2160 x 1440 | 2417 | f/17,6 | 7,8 |
| 1Ds | Canon | CMOS | 11,0 | 1.0 х | 8,8 µm | 852 | 35,8 x 23,8 | 4064 x 2704 | 2883 | f/14,8 | 11,1 |
| 1D Mark II | Canon | CMOS | 8,2 | 1.3 х | 8,2 µm | 548,2 | 28,7 x 19,1 | 3504 x 2336 | 3101 | f/13,8 | 12,9 |
| 5D | Canon | CMOS | 12,7 | 1.0 х | 8,2 µm | 852 | 35,8 x 23,9 | 4368 x 2912 | 3101 | f/13,8 | 12,9 |
| 300D/D60/10D | Canon | CMOS | 6,3 | 1.6 х | 7,4 µm | 342,8 | 22,7 x 15,1 | 3072 x 2048 | 3400 | f/12,4 | 15,5 |
| 1Ds Mark II | Canon | CMOS | 16,6 | 1.0 х | 7,2 µm | 864 | ~ 36 x 24 | 4992 x 3328 | 3514 | f/12,1 | 16,5 |
| 1D Mark III | Canon | CMOS | 10,1 | 1.3 х | 7,2 µm | 525,5 | 28,1 x 18,7 | 3888 x 2592 | 3514 | f/12,1 | 16,5 |
| 1D x | Canon | CMOS | 17,9 | 1.0 х | 6,9 µm | 864 | 36 x 24 | 5184 x 3456 | 3657 | f/11,7 | 17,9 |
| 350D/20D/30D | Canon | CMOS | 8,2 | 1.6 х | 6,4 µm | 337,5 | 22,5 x 15,0 | 3504 x 2336 | 3955 | f/10,8 | 20,9 |
| 5D II / 1Ds III | Canon | CMOS | 21,0 | 1.0 х | 6,4 µm | 864 | ~ 36 x 24 | 5616 x 3744 | 3955 | f/10,8 | 20,9 |
| 5D III | Canon | CMOS | 22,1 | 1.0 х | 6,25 µm | 864 | 36 x 24 | 5760 x 3840 | 4064 | f/10,6 | 22,1 |
| 1000D/400D/40D | Canon | CMOS | 10,1 | 1.6 х | 5,7 µm | 328,6 | 22,2 x 14,8 | 3888 x 2592 | 4455 | f/9,6 | 26,6 |
| Canon EOS 1D Mark IV | Canon | CMOS | 16,1 | 1.3 х | 5,7 µm | 518,9 | 27,9 x 18,6 | 4896 x 3264 | 4455 | f/9,6 | 26,6 |
| Canon EOS 450D | Canon | CMOS | 12,2 | 1.6 х | 5,2 µm | 328,6 | 22,2 x 14,8 | 4272 x 2848 | 4888 | f/8,7 | 32,0 |
| 500D, 50D | Canon | CMOS | 15,1 | 1.6 х | 4,7 µm | 332,3 | 22,3 x 14,9 | 4752 x 3168 | 5413 | f/7,9 | 39,2 |
| 7D / 60D / 600D | Canon | CMOS | 17,9 | 1.6 х | 4,3 µm | 332,3 | 22,3 x 14,9 | 5184 x 3456 | 5905 | f/7,2 | 46,7 |
| 7D Mark II | Canon | CMOS | 19.96 | 1.6 х | 4,1 µm | 336 | ~ 22,4 x 15,0 (?) | 5472 x 3648 | ~ 6177 | f/6.9 | 50,3 |
| 5Ds (r) | Canon | CMOS | 50,3 | 1.0 х | 4,1 µm | 864 | 36 x 24 | 8688 x 5792 | 6130 | f/6.9 | 50,3 |
| N i k o n | |||||||||||
| D1/D1H | Sony | CCD | 2,6 | 1.5 х | 11,9 µm | 367,4 | 23,7 x 15,5 | 2000 x 1312 | 2143 | f/20 | 6,2 |
| D2H | Nikon | JFET | 4,0 | 1.5 х | 9,6 µm | 367,4 | 23,7 x 15,5 | 2464 x 1632 | 2641 | f/16,1 | 9,3 |
| D1X**** | Sony | CCD | 5,3 | 1.5 х | 5,9/11,9 | 369,7 | 23,7 x 15,6 | 4028 x 1324 | — | — | — |
| D700/D3/D3s | ? | CMOS | 12.1 | 1.0 х | 8,4 µm | 860,4 | 36,0 x 23,9 | 4256 x 2832 | 3003 | f/14,1 | 12,2 |
| D4 | ? | CMOS | 16,2 | 1.0 х | 7,3 µm | 860,4 | 36,0 x 23,9 | 4928 x 3280 | 3476 | f/12,4 | 16,2 |
| D40/D50/D70/D100 | Sony | CCD | 6,0 | 1.5 х | 7,8 µm | 367,4 | 23,7 x 15,5 | 3008 x 2000 | 3237 | f/13,1 | 14,0 |
| D3000/D40x/D60/D80/D200 | Sony | CCD | 10,0 | 1.5 х | 6,1 µm | 372,9 | 23,6 x 15,8 | 3872 x 2592 | 4167 | f/10,3 | 23,4 |
| D3X | ? | CMOS | 24,4 | 1.0 х | 5,9 µm | 861,6 | 35,9 x 24 | 6048 x 4032 | 4279 | f/9,9 | 24,4 |
| D5000 / D90 | Sony | CMOS | 12.2 | 1.5 х | 5,4 µm | 369,7 | 23,7 x 15,6 | 4288 x 2848 | 4637 | f/9 | 28,8 |
| D300 (s) / D2X (s) | Sony | CMOS | 12.2 | 1.5 х | 5,4 µm | 369,7 | 23,7 x 15,6 | 4288 x 2848 | 4637 | f/9 | 28,8 |
| D800 (e) | ? | CMOS | 36,2 | 1.0 х | 4,9 µm | 861,6 | 35,9 x 24 | 7360 x 4912 | 5207 | f/8,2 | 36,3 |
| D7000/5100 | Sony | CMOS | 16.1 | 1.5 х | 4,8 µm | 370,5 | 23,6 x 15,7 | 4928 x 3264 | 5303 | f/8,1 | 37,4 |
| S o n y | |||||||||||
| A 100/200/230/300/330 | Sony | CCD | 10.0 | 1.5 х | 6,1 µm | 372,9 | 23,6 x 15,8 | 3872 x 2592 | 4167 | f/10,2 | 23,3 |
| A900 / A850 | Sony | CMOS | 24,4 | 1.0 х | 5,9 µm | 861,6 | 35,9 x 24 | 6048 x 4032 | 4279 | f/9,9 | 24,4 |
| A500 | Sony | CMOS | 12.2 | 1.5 х | 5,7 µm | 366,6 | 23,5 x 15,6 | 4272 x 2848 | 4617 | f/9,6 | 28,6 |
| A700 | Sony | CMOS | 12.2 | 1.5 х | 5,5 µm | 368,2 | 23,5 x 15,6 | 4288 x 2856 | 4635 | f/9,2 | 28,8 |
| A350/A380 | Sony | CCD | 14.0 | 1.5 х | 5,1 µm | 369 | 23,5 x 15,7 | 4592 x 3056 | 4963 | f/8,6 | 33,0 |
| Sony A550 | Sony | CMOS | 14.0 | 1.5 х | 5,1 µm | 365 | 23,4 x 15,6 | 4592 x 3056 | 4984 | f/8,6 | 33,3 |
| SLT-A57/35/55/A580 | Sony | CMOS | 16,0 | 1.5 х | 4,8 µm | 366,6 | 23,5 x 15,6 | 4912 x 3264 | 5309 | f/8,1 | 37,7 |
| SLT-A77 / A65 / NEX-7 | Sony | CMOS | 24,0 | 1.5 х | 3,9 µm | 366,6 | 23,5 x 15,6 | 6000 x 4000 | 6485 | f/6,5 | 54 |
| F u j i f i l m***** | |||||||||||
| S2 Pro | Fujifilm | CCD | 6,1 | 1.6 х | 7,6 µm | 356,5 | 23 x 15.5 | 3024 x 2016 | 3340 | f/12,8 | 14,9 |
| S3/S5 Pro | Fujifilm | CCD | 6,1 | 1.6 х | 7,6 µm | 356,5 | 23 x 15.5 | 3024 x 2016 | 3340 | f/12,8 | 14,9 |
| P e n t a x | |||||||||||
| K100D (Super) /K110D | Sony | CCD | 6,0 | 1.5 х | 7,8 µm | 368,95 | 23,5 x 15,7 | 3008 x 2008 | 3251 | f/13,1 | 14,2 |
| K10D/K200D/K2000 | Sony | CCD | 10,0 | 1.5 х | 6,1 µm | 369 | 23,5 x 15,7 | 3872 x 2592 | 4185 | f/10,3 | 23,6 |
| 645D | Kodak | CCD | 39,5 | 0.7 х | 6,1 µm | 1452 | 44 x 33 | 7264 x 5440 | 4193 | f/10,2 | 24,5 |
| K-r | ? | CMOS | 12.2 | 1.5 х | 5,5 µm | 372,9 | 23,6 x 15,8 | 4288 x 2848 | 4615 | f/9,3 | 28,3 |
| K20D/K-7 | Samsung | CMOS | 14.5 | 1.5 х | 5,0 µm | 365 | 23,4 x 15,6 | 4672 x 3104 | 5071 | f/8,4 | 34,5 |
| K-5 | Sony | CMOS | 16.1 | 1.5 х | 4,8 µm | 370,5 | 23,6 x 15,7 | 4928 x 3264 | 5303 | f/8,1 | 37,4 |
| S i g m a****** | |||||||||||
| SD14/SD15/DP1/DP2 | Foveon | CMOS | 4,7 | 1.7 х | 7,8 µm | 285,7 | 20,7 x 13,8 | 2640 x 1760 | 3239 | f/13,1 | 14,1 |
| SD1 (m) | Foveon | CMOS | 15,4 | 1.5 х | 5 µm | 384 | 24 x 16 | 4800 x 3200 | 5080 | f/8,5 | 34,6 |
| S a m s u n g | |||||||||||
| GX-20 | Samsung | CMOS | 14.6 | 1.5 х | 5,0 µm | 365 | 23,4 x 15,6 | 4688 x 3120 | 5089 | f/8,4 | 34,6 |
| NV40 | ? | CCD | 10,1 | 6,0 x | 1,7 µm | 28,2 | 6,13 x 4,60 | 3648 x 2736 | 15116 | f/2,9 | 306 |
| O l y m p u s | |||||||||||
| E400/410/420/450 | Matsushita | NMOS | 9.98 | 2.0 х | 4,7 µm | 225 | 17,3 x 13,0 | 3648 x 2736 | 5356 | f/7,9 | 38,4 |
| E510/520/E3 | Matsushita | NMOS | 9.98 | 2.0 х | 4,7 µm | 225 | 17,3 x 13,0 | 3648 x 2736 | 5356 | f/7,9 | 38,4 |
| E620/E30/E5 | Matsushita | NMOS | 12.2 | 2.0 х | 4,3 µm | 225 | 17,3 x 13,0 | 4032 x 3024 | 5919 | f/7,3 | 48,7 |
| E-M5 | Matsushita | NMOS | 15.9 | 2.0 х | 3,7 µm | 225 | 17,3 x 13,0 | 4608 x 3456 | 6765 | f/6,3 | 63,7 |
| L e i c a | |||||||||||
| M8 | Kodak | CCD | 10 | 1.3 x | 6,8 µm | 479,7 | 26,8 x 17,9 | 3936 x 2630 | 3731 | f/11,4 | 18,1 |
| M9 | Kodak | CCD | 18,1 | 1.0 x | 6,8 µm | 864 | 36 x 24 | 5212 x 3472 | 3731 | f/11,4 | 18,1 |
| S2 | Kodak | CCD | 37.5 | 0,8 x | 6,0 µm | 1350 | 45 x 30 | 7500 x 5000 | 4230 | f/10 | 22,4 |
| H a s s e l b l a d | |||||||||||
| h4DII-31 | Kodak | CCD | 31,6 | 0,8 x | 6,8 µm | 1463 | 44,2 x 33,1 | 6496 x 4872 | 3731 | f/11,4 | 18,1 |
| h4DII-39 | Kodak | CCD | 39,0 | 0,7 x | 6,8 µm | 1807 | 49,1 x 36,8 | 7212 x 5412 | 3731 | f/11,4 | 18,1 |
| h4DII-50 | Kodak | CCD | 50,1 | 0,7 x | 6,0 µm | 1807 | 49,1 x 36,8 | 8176 x 6132 | 4230 | f/10 | 22,4 |
| P h o n e s | |||||||||||
| iPhone 3Gs | OV3650 | CMOS | 3,1 | 9.73 x | 1,75 µm | 9,8 | 3,63 x 2,71 | 2048 x 1536 | 14343 | f/2,95 | 275 |
| iPhone 4 | OV5650 | CMOS | 5,0 | 7,64 x | 1,75 µm | 15,7 | 4,59 x 3,42 | 2592 x 1936 | 14343 | f/2,95 | 275 |
| iPhone 4s | OmniVision | CMOS | 8,0 | 7,64 x | 1,4 µm | 15,7 | 4,59 x 3,42 | 3264 x 2448 | 18100 | f/2,37 | 438,7 |
| Nokia 808 | ? | CMOS | 41,4 | 3,5 x | 1,4 µm | 81 | 10,8 x 7,5 | 7728 x 5368 | 18100 | f/2,37 | 438,7 |
В эту таблицу я вложил много сил и своего времени, её копирование запрещено (с) VladimirMedvedev.com
Примечания:
1 Mp — количество мегапикселей в фотографии
2 DLA (diffraction limited aperture) — ДОД (дифракционное ограничение диафрагмы). Самая узкая диафрагма при которой возможна попиксельная резксть (подробнее см раздел Дифракиция, перед таблицей).
3 36х24 mp — показывает предполагаемое количество пикселей на полноформатной матрице, сделанной по технологии рассматриваемой камеры. Т.е., например, если сделать полноформатную матрицу на основе Canon 50D, то она будет на 39,2 mp.
4 Пиксели Nikon D1x прямоугольные. Реальные 5 mp, получаемые с матрицы растягивались в 10 mp фотографию. Рассчитывать dpi и dla для такой техники смысла нет.
5 Fujifilm — Подсчитывая dpi сенсора у камер Fujifilm с нестандартной матрицей (с ячейками двух типов), учитывались только основные пиксели. Из-за структуры матрицы, было бы не правильно считать и основные и дополнительные пиксели. Основные пиксели занимают практически весь полезный объём, а маленькие, дополнительные, — лишь небольшие ячейки между ними (для более подробной информации смотрите официальный сайт Fujifilm).
6 Sigma — Матрицы Foveon, которые используются в камерах компании Sigma, состоят из трёх слоёв (RGB) и, в отличае от других камер, каждый пиксель на фотографии формируется из трёх пикселей матрицы. Это происходит потому, что пиксели расположены один над одним и не несут дополнительной информации о яркости (только о цвете). Именно поэтому, при матрице в ~ 14 mp, фотографии получаются всего 4 mp. Плотность пикслов рассчитывается для одного слоя.
PS Не могу не отметить, что на самом деле, фотоприёмник занимает далеко не всю площадь пикселя, некоторое место приходится уделять также и, так называемой, обвязке. Для того, чтобы увеличить полезную площадь, производители создают специальные собирающие микро-линзы на матрице:
Чем с большей площади собирают свет микролинзы, тем более эффективной должна быть, в теории, работа матрицы, и тем меньше должно быть шумов. Но это пока только в теории…
Рад вновь приветствовать вас, дорогой читатель. С вами на связи, Тимур Мустаев. Ранее на нашем блоге уже обозревались светочувствительные элементы фотоаппаратов, их свойства, кроп-фактор, количество мегапикселей и прочие параметры. Сегодня настал тот день, когда я вам расскажу более подробно, какой размер матрицы фотоаппарата лучше и почему.
В чём подвох?
Итак, если вы заинтересовались этой темой, значит, вы заинтересованы в улучшении качества своих фотографий. Вы, наверняка, уже слышали байку от рекламщиков, что на качество фотографии влияет только лишь количество мегапикселей. На самом деле, это не совсем так. Почему? Давайте разбираться.
Практически в каждом магазине фотооборудования есть, как минимум, один постер, кричащий о новой камере со встроенной матрицей супер высокого разрешения. Естественно, стоить она будет много больше, чем «скромные» конкуренты, поэтому рекламировать их гораздо выгоднее.
Размер матрицы
Если говорить о габаритах датчика, то здесь любого читателя ожидает огромный диапазон вариантов. От миллиметровых сенсоров смартфонов до огромных светочувствительных элементов кинокамер. Я постараюсь затронуть лишь фотокамеры, насколько это будет возможно.
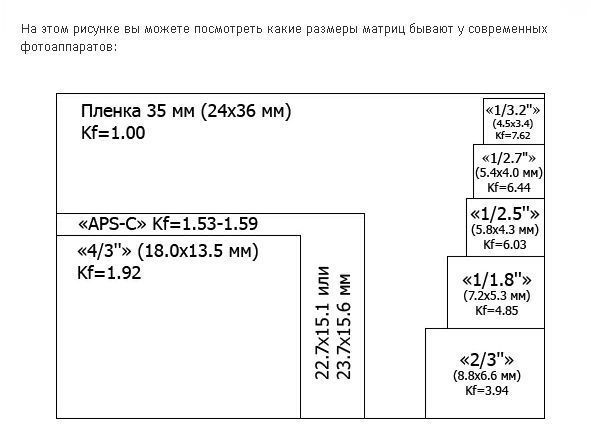
Итак, существует специальная классификация размеров матриц фотоаппаратов. Таблица, приведённая ниже, показывает более наглядно различия в их длине и ширине.
Как мы здесь видим, начинается с 1/3-½ дюйма. Как правило, такие сенсоры устанавливаются в наиболее дешёвых вариантах любительских мыльниц. Соотношение сторон таких матриц составляет 4:3. Вообще, этого достаточно для формирования семейного фотоальбома, но ведь мы не для этого начали так подробно изучать фотографию, верно?
Камеры с соотношением 2/3, 4/3 дюйма имеют такое же соотношение сторон, однако, пикселям на них более «комфортно», что положительно сказывается на качестве, потому применяются такие элементы на более дорогих фотоаппаратах.
Остальные варианты представляют собой сенсоры, с соотношением сторон 3:2, а также составляют половину от полного кадра. Последний пункт таблицы – Full Frame. Он полностью соответствует своему названию и представляет собой золотой стандарт – 35-миллиметровый светочувствительный элемент. 35-мм сенсор, кстати говоря, соответствует размеру плёнки старых камер, о чём уже говорилось ранее, в одной из прошлых статей.
Каков итог?
Настал тот момент, когда нужно формулировать тезисы. Итак, первый из них – чем шире и выше матрица, тем дальше пиксели находятся друг от друга. Как результат, пиксели «чувствуют себя более комфортно» в таких условиях: они меньше подвергаются перегреву и, сами по себе, имеют большие габариты, за счёт чего каждый из них может захватить большее количество света.
Исходя из этого, делаем вывод, что две камеры с одинаковым количеством мегапикселей и разной величиной сенсора получат различный конечный снимок. Камера с большим датчиком получит фотографию более качественную.
Мегапиксели
Как бы реклама не заверяла, что их количество сильно влияет на качество фотографии, это не совсем так. Вообще, число фотодиодов определяет не столько качество, сколько количество занимаемого в памяти объёма светового отпечатка, который передаётся на процессор. Конечно, высокое разрешение – это хорошо, только если они расположены на матрице соответствующего размера. Иначе, элементы будут перегревать друг друга, из-за чего на фотографиях может образоваться шум.
Благодаря тому, что огромное количество фотографов начинает разбираться в этом вопросе, производители начали создавать пиксели большей величины, чем раньше. А какой от этого толк?
Всё просто: площадь пикселя обширнее, следовательно, он способен захватить большее количество света и передать его на процессор для обработки.
Как мы знаем, многие камеры имеют определённый диапазон регулировки разрешения конечной фотографии. Так вот, подавляющая часть зеркалок имеют показатель от 12 до 24 Мп, а профессиональные – 10-36 Мп, причём площади сенсоров отличаются в 2 и более раз.
В чём смысл всего этого? Можно выбрать среднее разрешение меж двух крайних значений. Это обеспечит быструю обработку снимка и задействует лишь часть пикселей, из-за чего увеличится расстояние между работающими элементами. Такой лайфхак позволит избавиться от лишних шумов.
В чём же итог? Всё просто: под каждый случай будет хороша определённая матрица, однако, сравнение конечных результатов покажет превосходство полнокадрового датчика. Причиной тому универсальность последнего.
Если у вас есть зеркальная фотокамера и вы хотите научиться ею пользоваться, чтобы получать красивые фотографии, предлагаю вашему вниманию «Цифровая зеркалка для новичка 2.0» или «Моя первая ЗЕРКАЛКА». Данный видео курс, просто находка для новичка. Ознакомившись с его содержимым, вы получите отличные знания о зеркалки. Помните, саморазвитие — это большой шаг в будущее своего успеха.
Цифровая зеркалка для новичка 2.0 — у вас NIKON? Этот курс для вас.
Моя первая ЗЕРКАЛКА — у вас CANON? Этот курс для вас.
Надеюсь, у меня получилось рассказать о матрицах в фотоаппаратах, какая лучше и почему стоит выбирать больший сенсор. Если статья была интересна, а также полезна для вас – расскажите о ней друзьям, подпишитесь на обновления блога, впереди нас ждёт масса полезных фотостатей.
Всех вам благ, Тимур Мустаев.
Ни один фотоаппарат не может обойтись без матрицы. Современные модели оснащаются ей практически поголовно. Так произошло в момент, когда цифровые аналоги начали вытеснять устаревшие пленочные технологии. Матрица фотоаппарата является одним из основных компонентов, без которых невозможна эксплуатация всего прибора в целом, ведь его роль если и не является ключевой, то, по крайней мере, может считаться одной из ведущих. Именно матрица отвечает за качество будущего снимка, цветопередачу, четкость, полноту кадра. Как и другие важные элементы фототехники, матрица обладает рядом основных параметров, на которые обычно принято ориентироваться при выборе той или иной модели.
Типы матриц
Матрица цифрового фотоаппарата – это, в первую очередь, микросхема. Она преобразует световые лучи, которые, преломившись в системе линз и зеркал, попадают на нее. В результате такого преображения получается электрический сигнал, который выводится в цифровом виде, образуя снимок. За весь этот процесс отвечают специальные фотодатчики, расположенные на самой плате. Чем больше количество датчиков, чувствительных к свету, тем больше разрешение, и, как следствие, качество конечного снимка.
Встречаются матрицы следующих типов.
- ПЗС – тип матрицы фотоаппарата, который дословно расшифровывается как прибор зарядовой связи. В английском варианте – Charge-Coupled Device. Весьма известная аббревиатура, которая, впрочем, не так часто встречается в наши дни. Многие используют приборы, в основе которых лежат светодиоды, имеющие высокую светочувствительность, созданные на основе ПЗС системы, но, несмотря на широкую распространенность, данный вид микросхем все больше вытесняется более современным.
- КМОП-матрица. Формат матрицы, введенный в эксплуатацию в 2008 году. Впрочем, история создания данного формата уходит корнями в далекий 93-й, когда впервые была опробована технология APS. КМОП-матрица – это комплиментарный металл-оксид-полупроводник. Данная технология позволяет производить выборку отдельного пикселя почти так же, как и в стандартной системе памяти, к тому же, каждый пиксель оснащается дополнительным усилителем. Поскольку данная система является более современной, она зачастую оснащается автоматической подстройкой времени экспонирования каждого пикселя по отдельности. Данное улучшение позволяет получить полный кадр без потери боковых границ, а так же без потери верха и низа кадра. Полноразмерная матрица чаще всего бывает выполнена по технологии КМОП.
- Существует еще один тип матрицы – Live-MOS-матрица. Ее выпустила фирма «Панасоник». Данная микросхема функционирует при помощи технологии, в основе которых лежит МОП. МОП-матрица позволяет делать качественные профессиональные снимки без высокого уровня шума, а также исключает перегрев.
Физический размер матрицы
Размер матрицы фотоаппарата – одна из ее важнейших характеристик. Как правило, его указывают в дюймах в виде дроби. Больший размер подразумевает меньшее количество шумов на конечном снимке. К тому же, чем больше физический размер, тем больше световых лучей способна зарегистрировать матрица. Объем и количество лучей напрямую влияют на качество передачи оттенков и полутонов.
Кроп-фактор — это соотношение размеров кадра пленочного фотоаппарата 35 мм к размерам матрицы цифрового фотоаппарата. Все дело в том, что процесс создания цифровой матрицы довольно дорогостоящий, и поэтому производители постарались максимально сократить ее размер.
Если сравнить фото, сделанное с одним объективом на фотоаппарате с полнокадровой матрицей и фотоаппарате с «кропнутой» матрицей, то в первом случае угол охвата будет больше, и само изображение шире. Получается, что кропнутая матрица обрезает готовую картинку, отсюда и пошло такое название – кроп от англ. crop (резать).
Чаще всего кроп-фактор используют для замера наиболее точного расстояния фокуса у объектива, устанавливая его на различные приборы. Здесь вступает в игру такое понятие, как эквивалентное фокусное расстояние (ЭФР), которое вычисляется путем умножения фокусного расстояния (ФР) на кроп-фактор. Так, объектив с полнокадровой матрицей (кроп=1) и объективом с ФР 50 мм зафиксирует такое же по размерам изображение, как и кропнутая матрица 1,6 с объективом с ФР 30 мм. В этом случае можно сказать, что ЭФР у этих объективов одинаковое. Ниже приведена таблица, в которой можно провести сравнение, как меняется ЭФР в зависимости от кроп-фактора.
Количество мегапикселей и разрешение матрицы
Матрица сама по себе является дискретной. Она состоит более чем из миллиона элементов, которые и преобразовывают световой поток, идущий от линз. В характеристике каждой модели фотоаппарата можно отыскать такой параметр матричной платы как количество светочувствительных элементов или разрешение матрицы, измеряемое в мегапикселях.
Один мегапиксель равен одному миллиону светочувствительных датчиков, улавливающих преломленные в линзах лучи. Разумеется, чем этот параметр будет больше, тем лучший снимок получится сделать.
Правда, здесь есть и обратная зависимость. Если физический размер матрицы меньше, то и количество мегапикселей должно быть пропорционально меньше, в противном случае не удастся избежать эффекта дифракции: фотографии будут замыленными, без четкости.
Чем больше размер пикселя, тем больше он способен зафиксировать лучей, падающих на него. Размер пикселей напрямую связан с размерами матрицы, и влияет, в основном, на широту кадра. Чем больше количество мегапикселей с правильным соотношением размеров матрицы, тем больше лучей света смогу уловить датчики. Количество зафиксированных лучей напрямую влияет на исходные параметры преобразуемого материала: резкость, цветность, объем, контрастность, фокус.
Таким образом, разрешение фотокамеры влияет на качество снимка. Зависимость разрешения от объема использующихся пикселей очевидна. В объективе при помощи сложной расстановки оптических элементов формируется необходимый световой поток, который потом матрица поделит на пиксели. Оптические приборы тоже обладают собственным разрешением. Более того, если разрешение объектива достаточно мало, а передача двух светящихся точек, разделяемых одной темной, происходит как единого целого, то разрешение будет не столь отчетливо выделяться. Происходит это именно из-за прямой зависимости и привязки к числу мегапикселей.
Важно: на качественный снимок влияет как параметр разрешения матрицы, так и разрешение оптики объектива. Измеряется оно количество линий на 1 мм. Своего максимального значения разрешение достигает, когда оба показателя — и матрица, и объектив — соответствуют друг другу.
Если говорить о разрешении современных цифровых микросхем, то оно складывается из размера пикселя (от 2 до 8 мкм). На сегодняшний день на рынке представлены модели с показателями до 30 мп.
Светочувствительность
В фотоаппаратах по отношению к матрице принято использовать термин эквивалентной чувствительности. Связано это с тем, что подлинную чувствительность можно измерять различными способами в зависимости от множества параметров матрицы. Зато, применив усиление сигнала и цифровую обработку, пользователь может обнаружить высокие пределы чувствительности.
Параметры светочувствительности демонстрируют возможность исходного материала преобразовываться из электромагнитных воздействий потока света в электрический двоичный сигнал. Проще говоря, показывать, сколько требуется света для получения объективного уровня электрического импульса на выходе.
Параметр чувствительности (ISO) чаще всего используется фотографами для демонстрации возможности съемки в условиях плохого освещения. Увеличение чувствительности в параметрах прибора позволяет улучшить качество конечного снимка при необходимом значении диафрагмы и выдержки. ISO может достигать значения от нескольких десятков до тысяч и десятков тысяч единиц. Негативной стороной высоких значений светочувствительности является появление «шумов», которые проявляются в виде эффекта зернистости кадра.
Как проводить чистку матрицы в домашних условиях
Битые пиксели не всегда могут быть таковыми на самом деле. В действительности, когда происходит смена объектива, на матрицу могут попасть частицы мусора, вызывающие эффект «битого пикселя». Чистка матрицы фотоаппарата нужна для профилактики этого эффекта, а также для более комфортной работы с прибором.
Со временем, в особенности, если устройство эксплуатируется подолгу в различных погодных условиях, матрица может покрыться слоем пыли. При нарушении герметичности в области крепления объектива на поверхность может попасть небольшое количество влаги, что тоже может негативно сказаться на качестве кадра. Чистку можно доверить профессионалам из сервисного центра, а можно провести и самостоятельно, в домашних условиях.
Важно не забывать, что помещение, в котором будет происходить процедура, должно быть как можно менее пыльным, без сильных сквозняков. Прежде чем приступать к самой процедуре, необходимо убедиться, что аккумуляторная батарея заряжена.
Первый и самый простой способ очистки стеклянной поверхности кремниевой пластины микросхемы – сдувание пыли. Для этого следует использовать самую обычную грушу для чистки объективов, она продается в любом крупном магазине бытовой техники. К сожалению, использование груши помогает только при снятии легкого налета небольших песчинок пыли. Для более крупных частиц, которые могли прилипнуть к поверхности, может потребоваться что-то более основательное.

Если груша не помогла справиться с пятнами на матрице, можно попробовать использовать специальный набор для очистки стеклянной поверхности. Стоит он несколько дороже, но эффективность очистки значительно выше.
- Первый пункт в очистке – использование специального пылесоса. Его сборка не занимает много времени и детально описана в инструкции к набору. На конце устройства находится мягкий наконечник, так что повреждение прибора во время работы исключено. Лучше всего будет прочистить при помощи пылесоса не только стеклянную поверхность, но и все скрытые полости, доступные для чистки.

- После уборки при помощи пылесоса можно начинать влажную уборку. Она осуществляется при помощи специальных щеточек, одна из которых влажная, другая сухая. Этот вид уборки нужен для пылинок, которые, будучи мокрыми, попали на поверхность стекла, и, высохнув, прикрепились к нему, создав эффект «битого пикселя». Влажная щетка пропитана специальным раствором, который эффективно удаляет засохшие песчинки и пылинки, не оставляя пятен и разводов. Необходимо проводить по стеклу плавными аккуратными движениями, лишь слегка нажимая на саму щетку. Оставшаяся влага довольно быстро испарится сама. Даже если после влажной уборки на стекле остается пара капель, то они прекрасно удаляются сухой щеточкой (кисточкой).

- Третий этап – финальный, проводим сухой щеточкой по матрице и убеждаемся, что она чистая.
После очистки можно попробовать сделать тестовый снимок, чтобы убедиться, что процедура прошла успешно. Для этого необходимо закрыть диафрагму до максимального значения и сделать снимок чистого белого листа, приведя объектив в состояние полной расфокусировки. Затем сравнить качество снимков до и после.
Почистить матрицу зеркального фотоаппарата довольно просто, для этого не требуется каких-то глубоких знаний или большого опыта, достаточно желания, немного терпения и знания базовых принципов очистки высокоточной оптической техники.
Заключение
Матрица фотоаппарата является важнейшей деталью любой современной зеркалки. Без нее невозможно сделать снимок, а от ее параметров зависит дальнейшее использование устройства. Если параметры матрицы выбраны неправильно, фотоаппарат не будет оптимально справляться со своими задачами. Матрица не требует какого-то дополнительного ухода, кроме периодической чистки стеклянной поверхности.
Следует отметить, что светочувствительные датчики очень хрупкие и плохо переживают падение прибора даже с небольшой высоты, поэтому эксплуатировать фотоаппарат рекомендуется с максимальной осторожностью и аккуратностью.
Не все начинающие пользователи знают, что такое физический размер матрицы. Многие путают его с разрешением, но это разные вещи. При этом, физический размер матрицы — это один из важнейших параметров камеры, который влияет на качество снимков.
Прежде чем приступить к рассмотрению влияния размера матрицы на фотографии, рассмотрим сначала какие именно бывают матрицы.
Иногда бывает не просто узнать какая именно матрица стоит на том или ином фотоаппарате. Продавцы в магазинах зачастую просто не знают этого, а производители крайне редко указывают эту информацию. Почему? Этот загадка.

И всё же, что такое физический размер матрицы?
Как многие могли догадаться, физический размер матрицы — это ей длинна и ширина, измеряемые в миллиметрах.
Исторически сложилось так, что в спецификациях производители указывают физический размер матрицы в обратном количестве дюймов, а не в миллиметрах. Это выглядит следующим образом: 1 / 3.2 — это 3.4 * 4.5 мм.
Зачастую даже в дюймах размер матрицы в спецификациях не указывается, хотя тенденция начинает изменяться. В анонсах новых камер часто можно встретить эту информацию, но не факт, что её можно будет найти в инструкции к камере. В тех случаях, когда размер неизвестен, можно воспользоваться расчетом. Облегчит это занятие таблица со стандартными значениями:
|
В мм. |
В дюймах |
KF |
|
3.4 * 4.5 |
1 / 3.2 « |
7.6 |
|
4.0 * 5.4 |
1 / 2.7 « |
6.4 |
|
4,3 * 5,8 |
1 / 2,5″ |
6.0 |
|
5,3 * 7,2 |
1 / 1,8″ |
4.9 |
|
6,6 * 8,8 |
2 / 3″ |
4.0 |
|
15 * 23 |
APS-C |
1.6 |
Первая колонка содержит значения физического размера матрицы. Вторая колонка указывает соответствующий размер в дюймах. Третья колонка содержит информацию о том, насколько диагональ кадра 35мм больше диагонали матрицы.Чтобы произвести расчет, нужны будут два значения, которые всегда указываются в спецификациях к фотоаппаратам. Это эквивалентное фокусное расстояние и фокусное расстояние. В технической документации и на объективе вся нужная информация должна быть. Если фокусное расстояние и эквивалентное фокусное расстояние известны, вычисления легко провести путем деления второго на первое. Результатом расчета будет значение коэффициента KF.
Пример: имея F = 7 – 21мм, и Feq = 35 – 105мм, можно получить две формулы. Делить можно либо 35/7, либо 105/21. Результатом обеих действий будет KF = 5. По таблице находим самое близкое значение к расчетному и получаем интересующую нас информацию. В нашем случае это физический размер 1 / 1,8″ или 5,3 * 7,2мм.
Рассмотрим матрицы по типоразмерам:
- Самые маленькие матрицы — 1 / 3.2″. Используются они чаще всего в дешевых компактных фотоаппаратах. Их соотношение сторон составляет 4:3, а физический размер — 3.4 * 4.5 мм.
- Матрицы 1 / 2.7″ с соотношением сторон 4:3 и физическим размером 4.0 * 5.4 мм применяются также в недорогих компактах.
- Матрицы 1 / 2,5″ относятся к тому же сегменту камер, что и предыдущие две позиции. Они имеют соотношение сторон 4:3, а размер — 4,3 * 5,8мм.
- Матрицы размером 1 / 1,8″ с соотношением сторон 4:3 и геометрическим размером 5,3 * 7,2 мм применяются в более дорогих компактных камерах. Их можно встретить в устройствах среднего и выше среднего ценового диапазона.
- Размер матриц 2 / 3″ имеет соотношение сторон 4:3, а физический размер 6,6 * 8,8 мм. Часто они применяются в дорогих компактах с не сменной оптикой.
- Матрицы размером 4 / 3″ — физический размер 18 * 13,5 мм и соотношение сторон 4:3 применяются в дорогих камерах.
- DX, APS-C — это формат матриц с соотношением сторон 3:2 и размером около 24 * 18 мм. Эти матрицы применяются в полупрофессиональных и профессиональных зеркальных камерах. Широкое распространение они получили благодаря относительной дешевизне и хорошем качестве снимков.
- Полнокадровая матрица имеет размер 36 * 24 мм. Её соотношение сторон 3:2, а по размеру она соответствует 35 мм кадру. Такие матрицы дорого обходятся в производстве и применяются в профессиональной фототехнике.
- Среднеформатные матрицы имеют формат 60 * 45 мм с соотношением сторон 3:2. Такие матрицы сшиваются из нескольких более простых, что непременно сказывается на стоимости такого производства. Применяются исключительно в дорогих фотоаппаратах.
Разобравшись с основными размерами, стоит поговорить о том, на что же именно они влияют.
Прежде всего, размер матрицы влияет на габариты и вес фотокамеры. Размер оптической части напрямую зависит от размера матрицы, а отсюда можно делать соответствующие выводы.
Также размер матрицы является показателем цифрового шума, который будет передаваться на снимки.
Цифровой шум существенно портит фотографии, создавая впечатление наложенной на снимок маски из точек и царапин.
Шум может возникать по многим причинам. Это может быть дефект самой матрицы, проявляющийся в утечке тока, пробивающегося на соседние пиксели. Также появление шума может быть следствием нагрева матрицы.
На показатели шума влияют как физический размер матрицы, так и размеры пикселей. Чем размер матрицы больше, тем больше света на нее попадает. Соответственно полезной информации больше. Использование больших по размеру матриц позволяет получить более яркое изображение с естественными цветами.
При большом размере пикселей слой изоляции между ними тоже больше, а следовательно ток утечки уменьшается.
Для большего осознания понятия размера пикселя просто представьте две матрицы одинакового размера. На одной матрице 4000 пикселей (4Мп), а на второй 8000 пикселей (8Мп). Представьте теперь разницу в слое изоляции между каждым пикселем для первого и для второго случая.
Стоит заметить, что на матрицы маленького размера попадает мало света, а соответственно полезный сигнал не велик. Его нужно усиливать, а вместе с полезной информацией усиливаются и шумы.
Вывод!
Подводя итог, можно выделить тот факт, что на матрицу большого размера попадает большее количество света. Соответственно снимок будет ярче и четче. Увеличение размера матрицы увеличивает стоимость её производства, а, следовательно, фотоаппараты с матрицами большого физического размера будут стоить намного дороже своих компактных аналогов.
Copyright by TakeFoto.ru
Матрица фотоаппарата – один из основных компонентов современной фототехники. На ее поверхности строится изображение, которое фиксируется чувствительными элементами (их называют пикселями). Существует множество эффективных алгоритмов дальнейшей обработки сигнала, но именно матрица стоит в самом начале электронного тракта фотокамеры и в наибольшей степени влияет на качество фотоснимка.
До появления матрицы использовалась пленка. Принципиально устройство фотоаппарата с тех пор изменилось мало. Изображение, как и раньше, строится объективами разных типов на светочувствительной поверхности, а далее посредством различных технологических процессов переносится либо на бумагу, либо на дисплей компьютера. Но матрица имеет перед пленкой одно существенное преимущество – мгновенное получение результата. Именно это главным образом и определило повсеместное применение матриц в качестве фотосенсоров.
Устройство и типы матриц
Современная матрица — это микросхема, поверхность которой состоит из множества чувствительных к свету элементов. Каждый элемент является самостоятельным светоприемником, преобразующим падающий на него свет в электрический сигнал, который после предварительной обработки записывается на карту памяти. Изображение, которое мы видим, состоит из совокупности записанных в цифровом виде сигналов с каждого элемента, а значит, имеет дискретную структуру.
Существует две технологии преобразования света в сигнал, на которых может работать матрица фотоаппарата. Первая основана на свойстве полупроводниковых диодов накапливать электрический заряд под воздействием света, и носит название ПЗС (прибор с зарядовой связью) или CCD (то же самое по-английски). Вторая технология также использует накопление заряда, но в качестве приемника применяется не диод, а транзистор, что позволяет организовать усиление сигнала непосредственно в самом светочувствительном элементе. Эта технология называется КМОП (расшифровка мало что скажет неспециалисту, приводить ее не буду) или CMOS по-английски. Соответственно существуют и два типа матриц – ПЗС и КМОП.
Первая матрица работала по технологии ПЗС, поскольку эта технология проще и была внедрена первой. Сейчас более перспективным считается принцип КМОП, поскольку предварительное усиление сигнала непосредственно в элементе матрицы позволяет повысить чувствительность, снизить шумы, сократить энергопотребление и уменьшить стоимость матрицы. Несмотря на это, ПЗС матрицы все еще продолжают использоваться и сегодня.
Элементы, из которых состоит матрица фотоаппарата, способны фиксировать только интенсивность падающего на них света. Для того, чтобы записать цвет, необходимо, как минимум, три таких элемента (такое количество связано с особенностями восприятия цвета человеческим глазом, имеющим три вида колбочек), каждый из которых отвечает за свою область спектра. Чтобы реализовать цветовую чувствительность, перед каждым элементом ставится светофильтр, который пропускает только вполне определенный цвет – красный, зеленый или синий (модель RGB – Red-Green-Blue – которая используется в подавляющем большинстве матриц).
Таким образом, получается, что матрица состоит из набора трех видов сенсоров, при этом располагаться они могут разными способами – четырехугольником, у некоторых матриц шестиугольником, да и количество элементов разного цвета может быть разным. Например, в широко распространенном фильтре Байера на каждый красный и голубой элемент приходится два зеленых, при этом они еще и распределены случайным образом. Это сделано, чтобы смоделировать повышенную цветовую чувствительность человеческого глаза к зеленому цвету.
А что же тогда такое всем известный пиксель? Это легко понять, если представить себе, что фотоаппарат работает так же, как глаз. Изображение строится зрачком (объектив), воспринимается сетчаткой с палочками и колбочками (матрица) и обрабатывается мозгом (процессор). Собственно саму картинку мы видим мозгом, ведь структура сетчатки так же дискретна, как и матрица фотоаппарата.
Так вот пиксель – это логическая структура, формирующаяся в результате обработки сигнала процессором фотоаппарата по специальным алгоритмам. Пиксель может состоять и из одного светочувствительного элемента, и из трех и более. Например, в уже знакомом нам фильтре Байера цвет каждого элемента вычисляется по информации, полученной от окружающих его элементов, а следовательно, пиксель состоит из одного светочувствительного элемента. У разных матриц и алгоритмов это может быть по-разному.
По большому счету, нам все сказанное не так важно. На технологическом поле бьются производители фототехники, выпуская все более совершенные матрицы и постоянно улучшая алгоритмы обработки изображений. Что действительно нужно понимать, так это то, что для нас как пользователей, матрица состоит из пикселей, каждый из которых является элементом изображения, несущим информацию об интенсивности света и его цвете. А алгоритм обработки мы вообще вряд ли узнаем, поскольку свои ноу-хау производители берегут как зеницу ока.
Мы рассмотрели, как устроена матрица фотоаппарата, а теперь перейдем к ее основным характеристикам, понимание смысла которых поможет вам правильно выбрать хороший фотоаппарат.
Размер матрицы
Самая важная характеристика. И вот почему. Любой приемник излучения обладает шумами, т. е. на полезный сигнал всегда накладывается паразитный шум. Матрица не является исключением. Из теории известно, что чем больше света поступает в приемник излучения, тем меньше относительное влияние шума. Отсюда следует очевидный вывод: чем больше площадь чувствительного элемента, тем больше на него падает света, тем меньше шум.
Таким образом, чтобы матрица меньше шумела, она должна иметь больше размер и меньше пикселей. В этом случае можно будет снимать с большей чувствительностью ISO, с длинными выдержками, в темное время суток, ночью и т. д. и получать при этом фотографии высокого качества. Рассмотрим, какие размеры имеют современные матрицы.
Исторически сложилось так, что вместо того, чтобы просто указать размеры, например в миллиметрах, для обозначения размеров матриц используются малопонятные и запутанные величины типа 1/2,7”. Это длина диагонали матрицы в долях дюйма (надо же такое придумать!). Тем не менее, такое обозначение указывается наиболее часто, и есть мнение, что это делается специально, чтобы запутать потребителя, поскольку производители не очень любят афишировать размер матрицы. С размером тесно связано понятие кроп фактора – отношения диагонали полного кадра к диагонали матрицы, который также не вполне очевиден, но часто указывается в характеристиках фотоаппарата.
Самая большая матрица из доступных (среднеформатные мы здесь рассматривать не будем из-за их очень высокой стоимости) имеет размер полного кадра 24х36 мм (кадр малоформатной пленочной камеры). Такая матрица применяется в полнокадровых зеркалках и дорогих беззеркальных фотоаппаратах. Отличается высокой чувствительностью, малыми шумами и отличным качеством изображения.
Все остальные матрицы меньше. Самые маленькие используются в компактных любительских мыльницах, они же имеют и самые низкие характеристики. Зато и цена таких фотоаппаратов весьма доступна. Рекомендация здесь одна: покупайте фотоаппарат с большей матрицей.
Разрешение матрицы
Вторая важная характеристика. Отвечает за детализацию изображения. Измеряется в миллионах пикселей – мегапикселях (МПикс.). Чем больше разрешение, тем большего формата фотографию можно напечатать и больше увеличить изображение на мониторе. Иными словами, тем большее количество информации несет цифровой снимок.
К сожалению, эта характеристика сильно пострадала в маркетинговых войнах производителей фототехники. Когда цифровая фотография только начиналась, разрешение действительно было главным параметром матрицы. Тогда матрица фотоаппарата мыльницы имела разрешение 3 – 4 МПикс., а у профессиональных зеркалок около 6. Этого мало, поскольку с 6 МПикс. можно напечатать фотографию размером не более А4, а ведь это профессиональная камера!
Но потом началась гонка мегапикселей, которая привела к тому, что качество изображения недорогой мыльницы с 16 МПикс. стало хуже, чем у зеркалки с 10 МПикс. Маленькая матрица 1/2,7” просто не в состоянии обеспечить приемлемый световой поток для 16 МПикс. втиснутых в 5,27х3,96 мм. Снимок получается шумным, шумоподавляющие алгоритмы замыливают картинку, четкость падает. В общем, беда. А ведь с 16 МПикс можно было бы легко напечатать фотографию 40х30 см и даже больше (!). Правда, в случае матрицы большего размера (например, формата APS-C размером 25,1×16,7 мм) , а не с той, о которой я говорю.
Вы сами должны решить, фотографии какого формата будете печатать или рассматривать на мониторе. А рекомендация здесь состоит в том, что предпочтительнее выбрать матрицу с меньшим разрешением, но с большим размером, она точно будет работать лучше. Например, для матриц упомянутого выше формата APS-C оптимальным можно считать разрешение 12 – 16 МПикс. А часто ли вы печатаете фотографии формата А3?
Светочувствительность матрицы
Эта характеристика определяет возможность матрицы регистрировать слабые световые потоки, т. е. снимать в темноте или с короткими выдержками. Определяется в единицах международного стандарта ISO. Как мы уже говорили выше, чем больше чувствительность, тем больше шумов. Матрица фотоаппарата типа КМОП шумит меньше, чем ПЗС. Большая по размерам меньше, чем маленькая. С меньшим разрешением меньше чем с большим.
Обычно фотоаппарат настроен по умолчанию на чувствительность 100 ISO. Качественные крупные матрицы на 200 ISO. Рекомендую снимать с как можно меньшей чувствительностью. Повышение чувствительности приводит к шумам и оправданно только тогда, когда по-другому снять кадр вообще невозможно, например, ночью без штатива или быстродвижущийся объект в условиях недостаточной освещенности. Во всех остальных случаях устанавливайте чувствительность как можно меньше.
Соотношение сигнал/шум матрицы
Этот параметр как раз и отражает шумность матрицы. Практически мы уже рассмотрели, как матрица фотоаппарата создает шумы и от чего они зависят. Добавлю лишь то, что кроме типа, размера, чувствительности, шум зависит еще и от температуры матрицы, чем она выше, тем шум больше. А при интенсивной работе матрица нагревается. В беззеркальных фотоаппаратах матрица работает постоянно, а в зеркалках только в момент срабатывания затвора, поэтому при прочих равных условиях матрицы даже любительских зеркальных фотоаппаратов шумят меньше.
Борьба с шумом это отдельная тема. Развитие цифровой техники идет очень быстрыми темпами и с каждым годом матрицы становятся все более совершенными. Шум можно значительно уменьшить при обработке снимков в фоторедакторах, но помните, что даже великий Photoshop не всемогущ, поэтому старайтесь придерживаться рекомендаций, которые давались выше.
На этом рассмотрение матриц можно завершить. Надеюсь, что современная матрица, пришедшая на смену пленке, не разочарует вас, поэтому снимайте, экспериментируйте и учитесь! И не экономьте на матрице, хотя эта рекомендация уже из другой области.
что это и почему она так важна?
Поделиться статьёй:
При выборе фотоаппарата нужно учитывать множество нюансов, обращать внимание на каждую деталь. И далеко не последнюю роль в процессе выбора играют именно характеристики матрицы, которой оснащена камера. Что же представляет собой эта самая матрица и почему она так важна? Давайте это выясним!
Содержание статьи:
Общее представление о матрице фотоаппарата
Если вы посмотрите в объектив камеры, вы легко найдете матрицу: видите блестящий прямоугольник в самом центре объектива? Да, это она и есть.
Матрица является важнейшим элементом фотокамеры, отвечающим за то, какое изображение мы получим в результате съемки.
По сути она представляет собой микросхему, которая состоит из светочувствительных элементов. Когда на нее падает свет, начинается формирование электрического сигнала определенного уровня интенсивности, который зависит от степени яркости света. При съемке она фиксирует свет, который впоследствии преобразуется в фотографию.
Кстати, количество мегапикселей, которое имеет фотокамера, также зависит именно от матрицы и может колебаться от 0.3 до 10 и более (чем дороже и качественнее фотоаппарат, тем больше мегапикселей он имеет).
Изначально матрица создает монохромное (ч.б) изображение. В цветное оно преобразуется благодаря светофильтрам, которыми покрываются ее составные части.
Особенности строения матрицы
Что касается структуры матрицы, то она является дискретной и складывается из множества частей, в совокупности преобразующих падающий на нее свет. Один фотодиод в составе создает один пиксель фотографии.
Как вы наверняка знаете, каждое цифровое изображение представляет собой что-то вроде мозаики, состоящей из множества точек, которые в совокупности и являются фотографией. Изображение не «распадается» именно потому, что этих точек очень много и они имеют высокую плотность расположения относительно друг друга. Вполне логично предположить, что если бы плотность их расположения была ниже, мы бы увидели, как изображение распадается на эти самые точки, и это было бы наглядной демонстрацией дискретного характера структуры матрицы.
Матрица как альтернатива пленки
В те времена, когда цифровой фототехники еще не существовало, светочувствительным элементов, выполняющим функции матрицы, была пленка. Если проанализировать устройство пленочных и цифровых фотоаппаратов, можно увидеть, что существенных отличий между ними не так уж много. Основным отличием как раз и будет схема приема и преобразования света.
Как именно происходит процесс приема света в фотокамере с пленкой? В тот момент, когда фотограф нажимает кнопку спуска, затвор открывается, в результате чего пленка принимает свет. До того, как затвор вновь закрывается, идет химическая реакция, а ее итогом является формирование фотографии.
Как вы можете заметить, процесс создания фотоснимка был совершенно иным, и в современных фотоаппаратах матрица выполняет именно функцию пленки, то есть генерирует изображение. Они выполняют совершенно одинаковые функции, разница состоит лишь в технике их выполнения и в хранилище созданного изображения, которым в первом случае выступает пленка, а во втором — карта памяти фотоаппарата.
Характеристики матрицы
Необходимо понимать, что матрицы бывают совершенно разными по качественным показателям. В этом вопросе важным сигналом будет цена: в том или ином ценовом сегменте матрицы имеют определенный уровень качества. Будьте готовы к тому, что бюджетные варианты фотоаппарата вряд ли будут обладать высококачественной матрицей. Поскольку матрицу можно смело назвать сердцем камеры, не стоит экономить при выборе. Вы ведь хотите, чтобы ваши снимки были на высоте? Тогда остановите свой выбор на фотоаппарате, оснащенном качественной матрицей.
По каким параметрам следует выбирать матрицу?
- Размер
- Разрешение
- Соотношение сигнал-шум
- Уровень светочувствительности
- Динамический диапазон
Итак, рассмотрим первый параметр из нашего списка, а именно — размер матрицы. Его определяет величина пикселей, а также плотность их расположения относительно друг друга. Меньшая плотность расположения пикселей дает меньший уровень нагрева матрицы и более сильное соотношение сигнала и шума, которое создает более четкую фотографию.
Учтите, что именно размер матрицы является ее главной характеристикой. При выборе на него нужно обратить особое внимание.
Что же обеспечивает размер матрицы и почему он является таким важным параметром?
Итак, размер матрицы диктует:
- Уровень шума фотографии
- Глубину и насыщенность ее цвета
- Динамический диапазон
- Размер фотокамеры
Больший размер матрицы обеспечивает:
- Низкие показатели шума на фотографии. Матрица, имеющая большую поверхность, принимает больше света. Это будет сопряжено с меньшим нагревом, меньшей погрешностью в процессе квантования, соответственно, меньшим уровнем воздействия нежелательных шумов. Чем больше физический размер матрицы, тем меньше посторонних шумов будет на снимке, даже если съемка осуществляется при низком уровне освещения. Если говорить проще, фотография не будет пестрить лишними точками, точно не способствующими эстетике снимка.
- Широкий динамический диапазон
- Насыщенные, глубокие цвета снимка
Глубина цвета является показателем, который определяет возможность камеры идентифицировать любые метаморфозы цвета, даже самые незначительные. Это особенно ценно для фотографий однотонных пейзажей, не имеющих резких цветовых переходов. Большая матрица способна уловить даже самый незначительный цветовой переход, в то время как маленькая не имеет такой возможности.
Единственный недостаток, с которым придется смириться при выборе большой матрицы, это размер самой камеры. Чем больше матрица, тем больше размер камеры. Строго говоря, это вряд ли можно считать серьезным недостатком, учитывая широкий спектр преимуществ, которые дает матрица большого размера.
Виды матрицы
Он определяет способ работы матрицы.
На этом основании матрицы делят на 2 технологии:
- CMOS
- CCD
Конечная цель является одинаковой: накопление света. Разница в том, что является элементом, составляющим структуру. В первой технологии это диод, а во второй — транзистор.
Если говорить о качестве фотографий, то плюсом CCD-технологии были более приятные глазу цвета, а CMOS-технология выгодно отличалась гораздо меньшим уровнем шума.
В наше время подавляющее большинство камер оснащено матрицей CMOS.
Чувствительность матрицы
Она является очень важным параметром. Чем большую чувствительность установить, тем больше возможность зафиксировать на фотографии плохо освещенные объекты. Но при таких условиях будут также увеличиваться нежелательные шумы.
Параметр IS0 является эквивалентным показателем чувствительности. 50 — самый низкий показатель чувствительности, при котором чистое фото не подвергается разрушению шумом.
Сигнал-шум
Это параметр, который находится в непосредственной связи с чувствительностью. Он определяет уровень света и шумов на снимке.
Нужно помнить, что любое фото имеет определенный показатель шума. Светочувствительность характеризуется тем же. Она не может иметь статичных показателей. Они будут меняться, и эти изменения зависят от условий съемки.
Даже если свет совсем отсутствует, фотодатчик все равно продемонстрирует в итоге определенное значение. Как раз это и является шумом. Чтобы получить качественную фотографию, сигнал должен побороть помехи на определенном уровне. Это явление и носит название «сигнал-шум».
Чтобы фотография получилась четкой и не имела нежелательных шумов, нужно правильно настроить фильтры, чтобы они не пропустили эти помехи.
Если увеличивать уровень чувствительности матрицы, действие фильтра будет ослабевать, чтобы поймать слабый сигнал. Но одновременно с этим на снимке отразятся и шумы. Поэтому, чтобы не нужно было усиливать чувствительность, необходимо правильно настроить выдержку.
Что нужно сделать, чтобы ослабить помехи?
Чтобы уровень шума был минимальным, необходимо настраивать минимальную чувствительность матрицы. Однако эта возможность напрямую зависит от того, позволяет ли это выдержка камеры.
Если же требуется уменьшать выдержку, то одновременно с этим необходимо увеличивать чувствительность, что в свою очередь приведет к увеличению уровня шума. Определенное значение приведет к тому, что шумы станут видны на снимке. Потому при съемке выбор стоит между уменьшенной чувствительностью и уменьшенным временем выдержки.
Все это говорит в пользу выбора камеры с большим размером матрицы, позволяющего снижать уровень шума и уменьшать выдержку, чтобы снимать объекты в движении без ущерба качеству изображения.
Разрешение матрицы
Этот параметр для многих является очень важным при выборе камеры. Так ли это? Попробуем разобраться.
Размер пикселя является очень важным параметром, и вот почему это так: когда пиксель больше по размеру, он способен «поймать» больше света. Матрица подобного типа будет давать меньшее количество шумов.
Если матрица имеет большее разрешение, то размер пикселей, которые ее составляют, меньше, а это стимулирует нагрев и поднимает уровень шумов.
Отличительные черты размера пикселя:
- Уровень шумов. Как уже было сказано выше, меньший размер пикселя предполагает высокий уровень шумов.
- Уровень шевеления. Чем меньше размер пикселя, тем выше его чувствительность к дрожанию и смещению камеры.
- Высокие требования к объективу камеры. Чем меньше размер пикселя, тем более высокая разрешающая способность объектива потребуется для качественных снимков.
- Чем больше разрешение фотоаппарата, тем большие возможности должен иметь компьютер, который будет обрабатывать снимки. Если вы хотите получить от съемки отличный результат, но не занимаетесь фотографированием в RAW, то вам предстоит довольно продолжительная и непростая работа в фоторедакторах на компьютере. А при редактировании снимков в очень высоком разрешении, например, составляющем 24 мегапикселя и выше это и вовсе может стать очень сложной задачей.
Динамический диапазон матрицы
Он устанавливает максимальный диапазон яркости фотографии. Каждый из пикселей, составляющих матрицу, имеет свой уровень яркости. Функцией динамического диапазона является идентификация широты яркого участка снимка, который способен охватить фотоаппарат без ущерба качеству наиболее темных и наиболее ярких частей кадра.
Динамический диапазон является статичной характеристикой матрицы. Его невозможно изменить. Правда, есть возможность сделать его более узким, если повысить чувствительность ISO, но это далеко не всегда сможет решить проблему. Строго говоря, это даже нежелательно.
Когда фотоаппарат не справляется с трудными условиями съемки, например, если снимать нужно против солнца, мы получаем на фотографии слишком сильные контрасты, которые действительно режут глаз. При взгляде на такие фотографии даже непрофессионал вынесет кадру строжайший вердикт и, конечно, будет совершенно прав.
При таких результатах съемки говорят, что динамический диапазон матрицы не справляется с условиями, в которых ведется съемка. Обычно для исправления этих недостатков нужно менять компоновку кадра, прибегать к разного рода профессиональным хитростям, которые сгладят досадные несовершенства, словом, делать все то, что с динамическим диапазоном фотоаппарата совершенно не связано, поскольку, как мы уже упомянули выше, менять его показатели невозможно, поскольку они статичны.
Поделиться статьёй:
13 августа 2013 г.

Сегодня мы изучим встроенную матрицу камеры в нашей третьей и последней главе трилогии «Рассеивание матрицы камеры». В первой статье мы узнали, как разбить полную матрицу камеры на внутренние и внешние матрицы и как правильно обрабатывать неопределенности, возникающие в этом процессе. Вторая статья более подробно рассмотрела внешнюю матрицу, рассматривая несколько различных интерпретаций ее трехмерных вращений и трансляций.Сегодня мы рассмотрим внутреннюю матрицу так же, рассмотрев две равнозначные интерпретации: как описание геометрии виртуальной камеры и последовательность простых двумерных преобразований. После этого вы увидите интерактивную демонстрацию, иллюстрирующую обе интерпретации.
Если вы не заинтересованы углубляться в теорию и просто хотите использовать собственную матрицу с OpenGL, ознакомьтесь со статьями «Калиброванные камеры в OpenGL без glFrustum» и «Калиброванные камеры» и «gluPerspective».
Все эти статьи являются частью серии «Перспективная камера, интерактивный тур». Чтобы прочитать другие записи в серии, перейдите к оглавлению.
Собственная матрица преобразует 3D-координаты камеры в 2D-однородные координаты изображения. Эта перспективная проекция моделируется идеальной камерой-обскурой, показанной ниже.
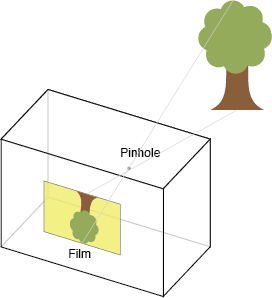
Собственная матрица параметризована Хартли и Циссерманом как
\ [ К = \ левый ( \ begin {array} {c c c} f_x & s & x_0 \\ 0 & f_y & y_0 \\ 0 & 0 & 1 \\ \ {Конец массива} \право ) \]
Каждый внутренний параметр описывает геометрическое свойство камеры.Давайте рассмотрим каждое из этих свойств подробно.
Фокусное расстояние, \ (f_x \), \ (f_y \)
Фокусное расстояние — это расстояние между точечным отверстием и пленкой (например, плоскость изображения). По причинам, которые мы обсудим позже, фокусное расстояние измеряется в пикселях. В настоящей камере-обскуре и \ (f_x \), и \ (f_y \) имеют одинаковое значение, что показано как \ (f \) ниже.
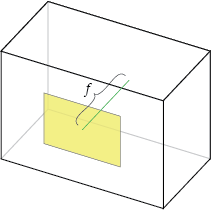
На практике \ (f_x \) и \ (f_y \) могут различаться по ряду причин:
- Недостатки в сенсоре цифровой камеры.
- Изображение было неравномерно масштабировано при последующей обработке.
- Объектив камеры вносит непреднамеренные искажения.
- Камера использует анаморфный формат, в котором объектив сжимает широкоэкранную сцену в датчик стандартного размера.
- Ошибки в калибровке камеры.
Во всех этих случаях полученное изображение имеет не квадратные пиксели.
Наличие двух разных фокусных расстояний не очень интуитивно понятно, поэтому некоторые тексты (например, Форсайт и Понсе) используют одно фокусное расстояние и «соотношение сторон», которое описывает величину отклонения от идеально квадратного пикселя.Такая параметризация хорошо отделяет геометрию камеры (то есть фокусное расстояние) от искажения (аспектного соотношения).
Смещение основной точки, \ (x_0 \), \ (y_0 \)
«Основная ось» камеры — это линия, перпендикулярная плоскости изображения, которая проходит через отверстие. Его сечение с плоскостью изображения называется «главной точкой», показанной ниже.
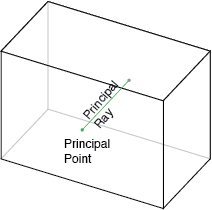
«Смещение главной точки» — это местоположение главной точки относительно происхождения фильма.Точное определение зависит от того, какое соглашение используется для определения местоположения источника; На рисунке ниже предполагается, что это в левом нижнем углу фильма.
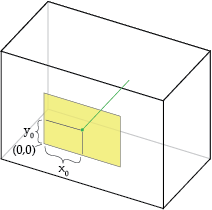
Увеличение \ (x_0 \) сдвигает точечное отверстие вправо:
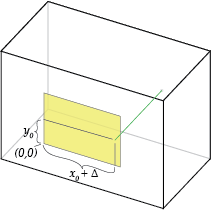
Это эквивалентно смещению пленки влево и оставлению точечного отверстия без изменений.
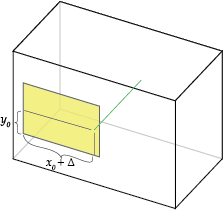
Обратите внимание, что поле, окружающее камеру, не имеет значения, имеет значение только положение точечного отверстия относительно пленки.
Skis Skew, \ (s \)
Перекос оси вызывает сдвиг в проецируемом изображении. Насколько я знаю, нет никакого аналога оси смещения настоящей камеры-обскуры, но, очевидно, некоторые процессы оцифровки могут вызвать ненулевой перекос. Мы рассмотрим перекос позже.
Прочие геометрические свойства
Фокусное расстояние и смещение главной точки представляют собой простые сдвиги пленки относительно точечного отверстия. Должны быть другие способы трансформировать камеру, верно? Как насчет поворота или масштабирования пленки?
Вращение пленки вокруг точечного отверстия эквивалентно вращению самой камеры, которая обрабатывается внешней матрицей.Вращение пленки вокруг любой другой неподвижной точки \ (x \) эквивалентно вращению вокруг точечного отверстия \ (P \), а затем переводу \ ((x-P) \).
Как насчет масштабирования? Должно быть очевидно, что удвоение всех размеров камеры (размер пленки и фокусное расстояние) не влияет на захваченную сцену. Если вместо этого вы удваиваете размер пленки и , а не фокусного расстояния, это эквивалентно удвоению обоих (без операции) и затем вдвое уменьшению фокусного расстояния. Таким образом, представление масштаба фильма явно было бы излишним; оно фиксируется фокусным расстоянием.
Фокусное расстояние — от пикселей до мировых единиц
Это обсуждение масштабирования камеры показывает, что существует бесконечное количество камер с точечным отверстием, которые производят одно и то же изображение. Внутренняя матрица касается только взаимосвязи между координатами камеры и координатами изображения, поэтому абсолютные размеры камеры не имеют значения. Использование пиксельных единиц для фокусного расстояния и смещения главной точки позволяет нам представлять относительные размеры камеры, а именно положение пленки относительно ее размера в пикселях.
Другой способ сказать, что внутреннее преобразование камеры является инвариантным к равномерному масштабированию геометрии камеры. Представляя размеры в пиксельных единицах, мы естественным образом фиксируем эту инвариантность.
Вы можете использовать похожие треугольники для преобразования пиксельных единиц в мировые единицы (например, мм), если вам известно хотя бы одно измерение камеры в мировых единицах. Например, если вы знаете, что пленка камеры (или цифровой датчик) имеет ширину \ (W \) в миллиметрах, а ширина изображения в пикселях равна \ (w \), вы можете преобразовать фокусное расстояние \ (f_x \) в мировые юниты, использующие:
\ [F_x = f_x \ frac {W} {w} \]
Другие параметры \ (f_y \), \ (x_0 \) и \ (y_0 \) можно преобразовать в их аналоги мировых единиц \ (F_y \), \ (X_0 \) и \ (Y_0 \), используя аналогичные уравнения:
\ [ \ BEGIN {массив} {} ссс F_y = f_y \ frac {H} {h} \ qquad X_0 = x_0 \ frac {W} {w} \ qquad Y_0 = y_0 \ frac {H} {h} \ {Конец массива} \]
Как мы уже говорили ранее, важно только расположение точечного отверстия и пленки, поэтому физическая коробка, окружающая камеру, не имеет значения.По этой причине многие обсуждения геометрии камеры используют более простое визуальное представление: усеченная камера.
Видимая область камеры имеет форму пирамиды, и ее иногда называют «конусом видимости». Давайте добавим к нашей сцене несколько 3D-сфер и покажем, как они попадают в конус видимости, и создадим изображение.

Так как «коробка» камеры не имеет значения, давайте ее удалим. Также обратите внимание, что изображение фильма изображает зеркальную версию реальности. Чтобы исправить это, мы будем использовать «виртуальный образ» вместо самого фильма.Виртуальное изображение имеет те же свойства, что и изображение на пленке, но в отличие от истинного изображения, виртуальное изображение появляется перед камерой, и проецируемое изображение не переворачивается.

Обратите внимание, что положение и размер плоскости виртуального изображения являются произвольными — мы могли бы удвоить его размер, если бы мы также удвоили его расстояние от точечного отверстия.
После удаления истинного изображения у нас остаётся представление «усечённости» нашей камеры-обскуры.
Пинхол был заменен кончиком конуса видимости, и пленка теперь представлена плоскостью виртуального изображения.Мы будем использовать это представление для нашей демонстрации позже.
В предыдущих разделах мы интерпретировали наши входящие 3-векторы как координаты 3D-изображения, которые преобразуются в однородные координаты 2D-изображения. В качестве альтернативы, мы можем интерпретировать эти 3-вектора как двумерные однородные координаты, которые преобразуются в новый набор двумерных точек. Это дает нам новый взгляд на внутреннюю матрицу: последовательность двумерных аффинных преобразований.
Мы можем разложить собственную матрицу на последовательность преобразований сдвига, масштабирования и сдвига, соответствующих наклону оси, фокусному расстоянию и смещению главной точки соответственно:
\ [ \ Начать {} Align K & = \ left ( \ begin {array} {c c c} f_x & s & x_0 \\ 0 & f_y & y_0 \\ 0 & 0 & 1 \\ \ {Конец массива} \право ) \\ [0.5em] знак равно \ Underbrace { \осталось ( \ begin {array} {c c c} 1 & 0 & x_0 \\ 0 & 1 & y_0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Translation} \ раз \ Underbrace { \осталось ( \ begin {array} {c c c} f_x & 0 & 0 \\ 0 & f_y & 0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Scaling} \ раз \ Underbrace { \осталось ( \ begin {array} {c c c} 1 & s / f_x & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Shear} \ Конец {} Align \]
Эквивалентные места разложения сдвига после масштабирования :
\ [ \ Начать {} Align K & = \ Underbrace { \осталось ( \ begin {array} {c c c} 1 & 0 & x_0 \\ 0 & 1 & y_0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Translation} \ раз \ Underbrace { \осталось ( \ begin {array} {c c c} 1 & s / f_y & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Shear} \ раз \ Underbrace { \осталось ( \ begin {array} {c c c} f_x & 0 & 0 \\ 0 & f_y & 0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Scaling} \ Конец {} Align \]
Эта интерпретация удачно разделяет внешние и внутренние параметры на сферы 3D и 2D соответственно.Это также подчеркивает, что внутреннее преобразование камеры происходит после проецирования . Одним заметным результатом этого является то, что внутренние параметры не могут влиять на видимость — скрытые объекты не могут быть обнаружены с помощью простых 2D преобразований в пространстве изображения.
Демонстрация ниже иллюстрирует обе интерпретации внутренней матрицы. Слева интерпретация «камера-геометрия». Обратите внимание, как точечные отверстия движутся относительно плоскости изображения при настройке \ (x_0 \) и \ (y_0 \).
Справа — интерпретация «2D-трансформации». Обратите внимание, что изменение результатов фокусного расстояния вызывает масштабирование проецируемого изображения, а изменение главной точки приводит к чистому переводу.
Javascript требуется для этой демонстрации.
Осталось : сцена с камерой и громкостью просмотра. Виртуальное изображение плоскости показано желтым цветом. Право : изображение с камеры.
В этой серии статей мы увидели, как разложить
- — полная матрица камеры на внутренние и внешние матрицы,
- внешней матрицы в трехмерное вращение с последующим переводом и
- внутренняя матрица на три основных 2D преобразования.\ text {Внешняя матрица} \\ [0.5em]
знак равно
\ Overbrace {
\ Underbrace {
\осталось (
\ begin {array} {c c c}
1 & 0 .Камера — Как получить проекционную матрицу из данных одометрии / ТФ? Переполнение стека
- Товары
- Клиенты
- Случаи использования
- Переполнение стека Публичные вопросы и ответы
- Команды Частные вопросы и ответы для вашей команды
- предприятие Частные вопросы и ответы для вашего предприятия
- работы Программирование и связанные с ним технические возможности карьерного роста
- Талант Нанимать технический талант
- реклама Связаться с разработчиками по всему миру
Объект для хранения параметров камеры
Коэффициенты радиального искажения, указанные как двух- или трехэлементный вектор. Когда вы указываете двухэлементный вектор, объект устанавливает третий элемент
0. Радиальное искажение происходит, когда лучи света изгибаются ближе к краям линзы, чем на оптическом центр. Чем меньше объектив, тем больше искажение.Камера Параметры объекта вычисляют радиально искаженное местоположение точки. Вы можно обозначить искаженные точки как ( x искажено , y искажено ), следующим образом:x искажено = x (1 + k 1 * r 2 + k 2 * r 4 + k 3 * r 6 )
y искажено = и (1 + k 1 * r 2 + k 2 * r 4 + k 3 * r 6 )
, достаточно двух коэффициентов. За серьезные искажения вы может включать k 3 . Неискаженный положения пикселей отображаются в нормализованных координатах изображения с началом координат в оптический центр. Координаты выражены в мировых единицах. ,x , и = неискаженный пиксель местоположения k 1 , k 2 и k 3 = радиальное искажение коэффициенты объектива р 2 = x 2 + и 2.Обычно , ,Что такое калибровка камеры? — MATLAB & Simulink
Что такое калибровка камеры?
Геометрическая калибровка камеры , также называемая камерой резекция , оценивает параметры объектива и датчика изображения изображение или видеокамера. Вы можете использовать эти параметры, чтобы исправить искажения объектива, измерить Размер объекта в мировых единицах или определить местоположение камеры на сцене. Эти задачи используются в таких приложениях, как машинное зрение, для обнаружения и измерения объектов.Они также используются в робототехнике, для систем навигации и реконструкции трехмерных сцен.
Примеры того, что вы можете сделать после калибровки камеры:
Параметры камеры включают внутренние, внешние и коэффициенты искажения. Оценить параметры камеры, вам нужно иметь 3-D точки мира и их соответствующее 2-D изображение точки. Вы можете получить эти соответствия, используя несколько изображений калибровочного шаблона, такой как шахматная доска.Используя соответствия, вы можете определить параметры камеры. После калибровки камеры, чтобы оценить точность оцениваемых параметров, вы можете:
-
Нанесите на карту относительные местоположения камеры и калибровочный шаблон
-
Рассчитайте ошибки перепроецирования.
-
Рассчитать ошибки оценки параметров.
Используйте Camera Calibrator для выполнения калибровки камеры и оценить точность оценочных параметров.
Camera Models
Компьютер Vision Toolbox ™ содержит алгоритмы калибровки для модели камеры-обскуры и модель камеры «рыбий глаз».
Алгоритм калибровки по точечному отверстию основан на модели, предложенной Жан-Ивом Буге [3]. Модель включает в себя модель камеры-обскуры [1] и искажение объектива [2]. Модель камеры-обскуры не учитывает искажение объектива, поскольку является идеальным Камера-обскура не имеет объектива.Чтобы точно представить реальную камеру, полный Модель камеры, используемая по алгоритму, включает радиальную и тангенциальную линзы искажение.
Из-за сильного искажения, производимого объективом «рыбий глаз», модель с точечным отверстием не может модель камеры «рыбий глаз». Подробнее о калибровке камеры с использованием модели «рыбий глаз» см. Основы калибровки «рыбий глаз».
Камера обскурыМодель
Камера обскуры — это простая камера без объектива и с одной маленькой апертурой.Лучи света проходят через апертуру и проецируют перевернутое изображение на противоположную сторону камеры. Представьте, что виртуальная плоскость изображения находится перед камерой и содержащий вертикальное изображение сцены.
Параметры камеры-обскуры представлены в матрице 4 на 3, называемой матрица камеры . Эта матрица отображает трехмерную сцену мира в плоскость изображения. Алгоритм калибровки вычисляет матрицу камеры, используя внешние и внутренние параметры.Внешние параметры представляют местоположение камеры в трехмерной сцене. Внутренние параметры представляют оптический центр и фокусное расстояние камеры.
Точки мира преобразуются в координаты камеры с помощью внешние параметры. Координаты камеры отображаются в плоскости изображения с помощью внутренние параметры.
Параметры калибровки камеры
Алгоритм калибровки вычисляет матрицу камеры, используя внешние и внутренние параметры.Внешние параметры представляют собой жесткое преобразование из 3-D мировая система координат для системы координат трехмерной камеры. Внутренние параметры представляют собой проективное преобразование координат трехмерной камеры в двумерную координаты изображения.
Внешние параметры
Внешние параметры состоят из вращения, R и перевод т . Источник системы координат камеры в его оптическом центре и его оси x- и y- определить плоскость изображения.
Собственные параметры
Собственные параметры включают фокусное расстояние, оптический центр, также известный в качестве основной точки , и коэффициент перекоса. Камера Собственная матрица, K , определяется как:
Перекос пикселей определяется как:
[cxcy] — Оптический центр (главная точка), в пиксели. (fx, fy) — фокусное расстояние в пикселях.
fx = F / px
fy = F / py
F — Фокусное расстояние в мировых единицах, обычно выражается в миллиметрах.
(px, py) — Размер пикселя в мировых единицах.с — коэффициент перекоса, который ненулевой, если изображение оси не перпендикулярны.
с = fxtanαИскажение в калибровке камеры
Матрица камеры не учитывает искажения объектива, потому что идеальная камера с точечным отверстием не имеет объектива.Чтобы точно представить реальную камеру, модель камеры включает радиальное и тангенциальное искажение линзы.
Радиальное искажение
Радиальное искажение возникает, когда лучи света изгибаются ближе к краям линзы, чем они делают в его оптическом центре. Чем меньше объектив, тем больше искажение.
Радиальные искажения Коэффициенты моделируют этот тип искажения. Искаженные точки обозначается как ( x искажено , y искажено ):
x искажено = x (1 + k 1 * r 2 + k 2 * r 4 + k 3 * r 6
000000 = и (1 + k 1 * r 2 + k 2 * r 4 + k 3 * r 6 )
-
x , и — Неискаженные местоположения пикселей. x и и являются в нормированных координатах изображения. Нормализованные координаты изображения рассчитывается из координат пикселей путем перевода в оптический центр и деление на фокусное расстояние в пикселях. Таким образом, x и y являются безразмерная.
-
k 1 , k 2 , и k 3 — радиальные искажения Коэффициенты объектива.
-
r 2 : x 2 + y 2
Как правило, для калибровки достаточно двух коэффициентов.Для серьезных искажений, например, в широкоугольных объективах, вы можете выбрать 3 коэффициента для включения k 3 .
Тангенциальное искажение
Тангенциальное искажение возникает, когда объектив и плоскость изображения не параллельны. Коэффициенты тангенциального искажения моделируют это тип искажения.
Искаженный точки обозначаются как ( x искажено , y искажено ):
x искажено = x + [2 * p 1 * x * y + p 2 * ( r 2 + 2 * x 2 )]
y искажено = y + [ p 1 * ( r 2 + 2 * y 2 ) + 2 * p 2 * x * y ]
-
x , и — Неискаженные местоположения пикселей. x и и являются в нормированных координатах изображения. Нормализованные координаты изображения рассчитывается из координат пикселей путем перевода в оптический центр и деление на фокусное расстояние в пикселях. Таким образом, x и y являются безразмерная.
-
р 1 и р 2 — Коэффициенты тангенциального искажения линзы.
-
r 2 : x 2 + y 2
Список литературы
[1] Zhang, Z.«Гибкая новая техника для камеры Калибровка «. IEEE-транзакций по анализу моделей и машин Интеллект . Том 22, № 11, 2000, с. 1330–1334.
[2] Хейккила, Дж. И О. Силвен. «Четырехступенчатая камера Процедура калибровки с неявной коррекцией изображения ». IEEE Международная конференция по компьютерному зрению и шаблону Признание .1997.
[4] Брадски Г. и А. Келер. Обучение OpenCV: Компьютерное зрение с библиотекой OpenCV .Севастополь, Калифорния: О’Рейли, 2008.
См. Также
Приложения
Похожие темы
,Формат матрицы фотоаппарата: Матрица фотоаппарата — основа основ