Физический размер матрицы и его влияние на качество снимков
Не все начинающие пользователи знают, что такое физический размер матрицы. Многие путают его с разрешением, но это разные вещи. При этом, физический размер матрицы — это один из важнейших параметров камеры, который влияет на качество снимков.
Прежде чем приступить к рассмотрению влияния размера матрицы на фотографии, рассмотрим сначала какие именно бывают матрицы.
Иногда бывает не просто узнать какая именно матрица стоит на том или ином фотоаппарате. Продавцы в магазинах зачастую просто не знают этого, а производители крайне редко указывают эту информацию. Почему? Этот загадка.
И всё же, что такое физический размер матрицы?
Как многие могли догадаться, физический размер матрицы — это ей длинна и ширина, измеряемые в миллиметрах.
Исторически сложилось так, что в спецификациях производители указывают физический размер матрицы в обратном количестве дюймов, а не в миллиметрах.
Зачастую даже в дюймах размер матрицы в спецификациях не указывается, хотя тенденция начинает изменяться. В анонсах новых камер часто можно встретить эту информацию, но не факт, что её можно будет найти в инструкции к камере. В тех случаях, когда размер неизвестен, можно воспользоваться расчетом. Облегчит это занятие таблица со стандартными значениями:
|
В мм. |
В дюймах |
KF |
|
3.4 * 4.5 |
1 / 3.2 « |
7. |
|
4.0 * 5.4 |
1 / 2.7 « |
6.4 |
|
4,3 * 5,8 |
1 / 2,5″ |
6.0 |
|
5,3 * 7,2 |
1 / 1,8″ |
4.9 |
|
6,6 * 8,8 |
2 / 3″ |
4. |
|
15 * 23 |
APS-C |
1.6 |
 6
6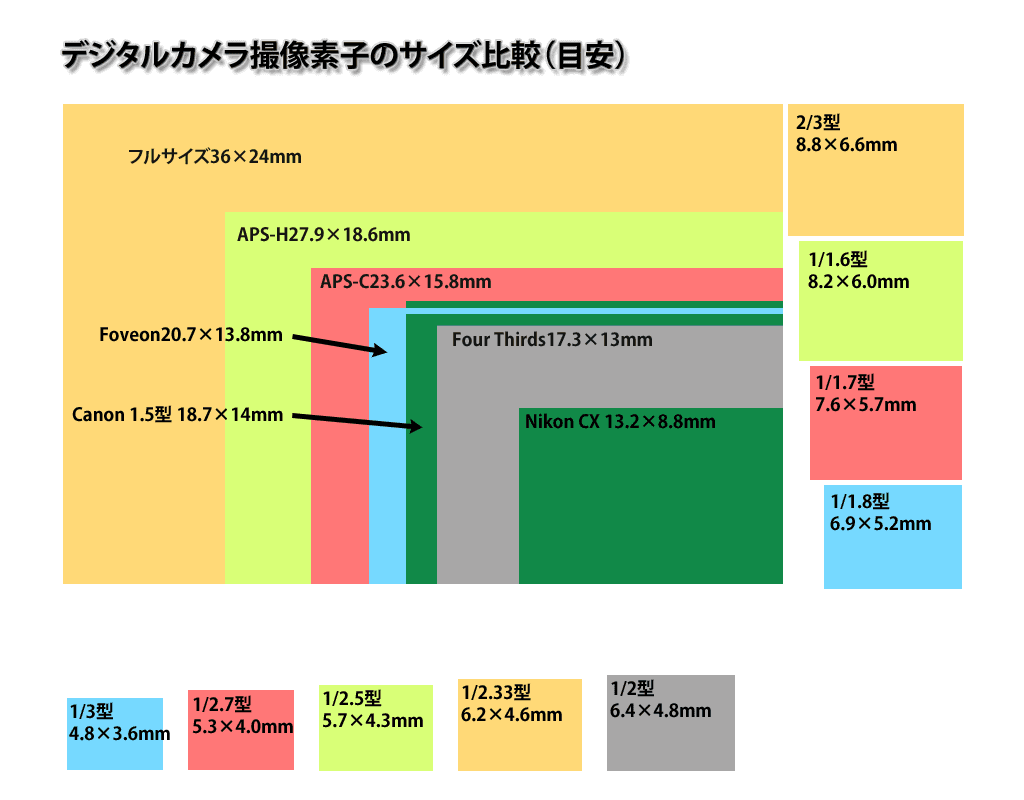 0
0Первая колонка содержит значения физического размера матрицы. Вторая колонка указывает соответствующий размер в дюймах. Третья колонка содержит информацию о том, насколько диагональ кадра 35мм больше диагонали матрицы.Чтобы произвести расчет, нужны будут два значения, которые всегда указываются в спецификациях к фотоаппаратам. Это эквивалентное фокусное расстояние и фокусное расстояние. В технической документации и на объективе вся нужная информация должна быть. Если фокусное расстояние и эквивалентное фокусное расстояние известны, вычисления легко провести путем деления второго на первое. Результатом расчета будет значение коэффициента KF.
Пример: имея F = 7 – 21мм, и Feq = 35 – 105мм, можно получить две формулы. Делить можно либо 35/7, либо 105/21. Результатом обеих действий будет KF = 5. По таблице находим самое близкое значение к расчетному и получаем интересующую нас информацию. В нашем случае это физический размер 1 / 1,8″ или 5,3 * 7,2мм.
Делить можно либо 35/7, либо 105/21. Результатом обеих действий будет KF = 5. По таблице находим самое близкое значение к расчетному и получаем интересующую нас информацию. В нашем случае это физический размер 1 / 1,8″ или 5,3 * 7,2мм.
Рассмотрим матрицы по типоразмерам:
- Самые маленькие матрицы — 1 / 3.2″. Используются они чаще всего в дешевых компактных фотоаппаратах. Их соотношение сторон составляет 4:3, а физический размер — 3.4 * 4.5 мм.
- Матрицы 1 / 2.7″ с соотношением сторон 4:3 и физическим размером 4.0 * 5.4 мм применяются также в недорогих компактах.
- Матрицы 1 / 2,5″ относятся к тому же сегменту камер, что и предыдущие две позиции. Они имеют соотношение сторон 4:3, а размер — 4,3 * 5,8мм.
-
Матрицы размером 1 / 1,8″ с соотношением сторон 4:3 и геометрическим размером 5,3 * 7,2 мм применяются в более дорогих компактных камерах.
 Их можно встретить в устройствах среднего и выше среднего ценового диапазона.
Их можно встретить в устройствах среднего и выше среднего ценового диапазона. - Размер матриц 2 / 3″ имеет соотношение сторон 4:3, а физический размер 6,6 * 8,8 мм. Часто они применяются в дорогих компактах с не сменной оптикой.
- Матрицы размером 4 / 3″ — физический размер 18 * 13,5 мм и соотношение сторон 4:3 применяются в дорогих камерах.
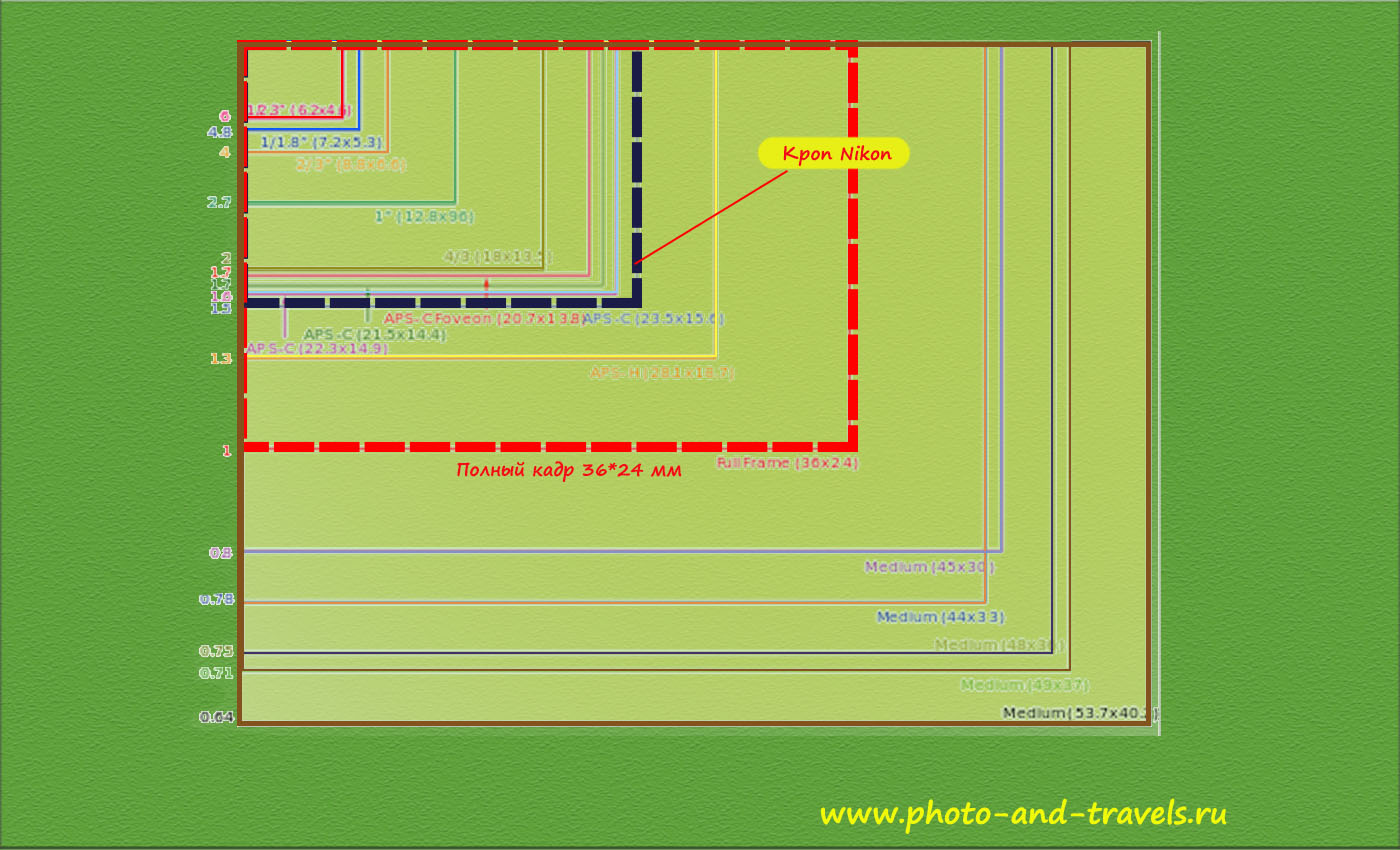
- DX, APS-C — это формат матриц с соотношением сторон 3:2 и размером около 24 * 18 мм. Эти матрицы применяются в полупрофессиональных и профессиональных зеркальных камерах. Широкое распространение они получили благодаря относительной дешевизне и хорошем качестве снимков.
- Полнокадровая матрица имеет размер 36 * 24 мм. Её соотношение сторон 3:2, а по размеру она соответствует 35 мм кадру. Такие матрицы дорого обходятся в производстве и применяются в профессиональной фототехнике.
-
Среднеформатные матрицы имеют формат 60 * 45 мм с соотношением сторон 3:2.
Разобравшись с основными размерами, стоит поговорить о том, на что же именно они влияют.
Прежде всего, размер матрицы влияет на габариты и вес фотокамеры. Размер оптической части напрямую зависит от размера матрицы, а отсюда можно делать соответствующие выводы.
Также размер матрицы является показателем цифрового шума, который будет передаваться на снимки.
Цифровой шум существенно портит фотографии, создавая впечатление наложенной на снимок маски из точек и царапин.
Шум может возникать по многим причинам. Это может быть дефект самой матрицы, проявляющийся в утечке тока, пробивающегося на соседние пиксели. Также появление шума может быть следствием нагрева матрицы.
На показатели шума влияют как физический размер матрицы, так и размеры пикселей. Чем размер матрицы больше, тем больше света на нее попадает. Соответственно полезной информации больше. Использование больших по размеру матриц позволяет получить более яркое изображение с естественными цветами.
Чем размер матрицы больше, тем больше света на нее попадает. Соответственно полезной информации больше. Использование больших по размеру матриц позволяет получить более яркое изображение с естественными цветами.
При большом размере пикселей слой изоляции между ними тоже больше, а следовательно ток утечки уменьшается.
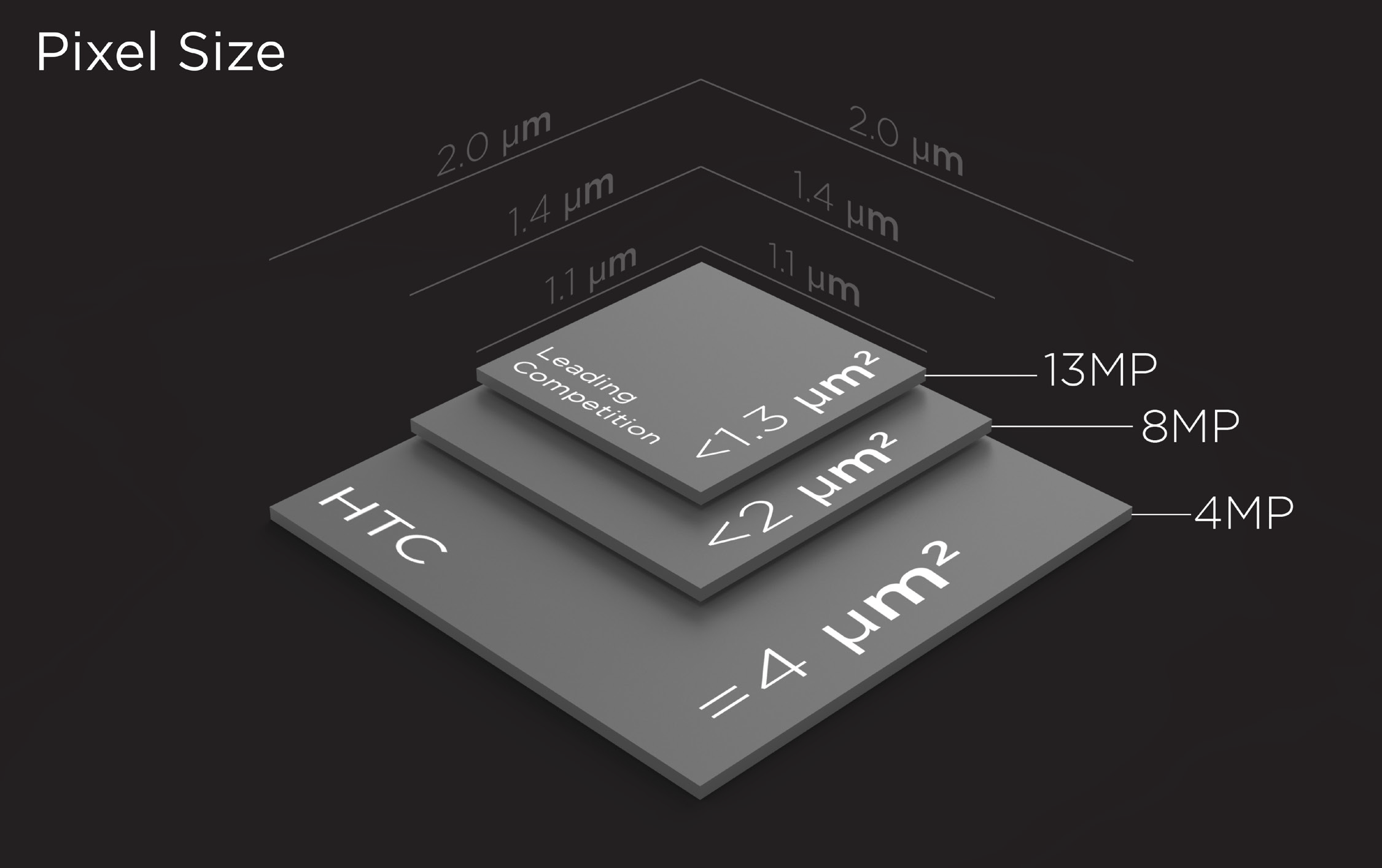
Для большего осознания понятия размера пикселя просто представьте две матрицы одинакового размера. На одной матрице 4000 пикселей (4Мп), а на второй 8000 пикселей (8Мп). Представьте теперь разницу в слое изоляции между каждым пикселем для первого и для второго случая.
Стоит заметить, что на матрицы маленького размера попадает мало света, а соответственно полезный сигнал не велик. Его нужно усиливать, а вместе с полезной информацией усиливаются и шумы.
Вывод!
Подводя итог, можно выделить тот факт, что на матрицу большого размера попадает большее количество света. Соответственно снимок будет ярче и четче. Увеличение размера матрицы увеличивает стоимость её производства, а, следовательно, фотоаппараты с матрицами большого физического размера будут стоить намного дороже своих компактных аналогов.
Увеличение размера матрицы увеличивает стоимость её производства, а, следовательно, фотоаппараты с матрицами большого физического размера будут стоить намного дороже своих компактных аналогов.
Copyright by TakeFoto.ru
Размер матрицы все, что нужно знать
Раньше было вполне логичным, что покупая компактную камеру, вы получали небольшую матрицу, а если выбирали крупногабаритную зеркалку со сменными объективами, матрица на ней была значительно больше. Это сказывалось на качестве фотографий, поскольку чем больше матрица, тем более детализированы были изображения.
Сейчас это в принципе, тоже в какой-то мере актуально, матрица — это самая дорогая часть камеры в плане производства, и чем больше матрица, тем и камера, соответственно, дороже. Потому на дорогие камеры обычно не устанавливаются матрицы 1/2.3 дюймовые, а на дешевых, соответственно, не найти полнокадровую.
Но надо сказать, что сейчас многие производители стали предлагать компактные камеры с относительно большими матрицами, точно так же как и камеры под сменные объективы с меньшими матрицами. Так что разобраться в ситуации, пожалуй, стало сложнее. Небольшие матрицы способны отлично срабатывать в различных условиях, и даже имеют некоторые преимущества перед большими.
Так что разобраться в ситуации, пожалуй, стало сложнее. Небольшие матрицы способны отлично срабатывать в различных условиях, и даже имеют некоторые преимущества перед большими.
За последние годы и сама технология создания матриц значительно продвинулась вперед, так что сегодня большое количество предлагаемых вариантов может смутить даже опытного пользователя, что уж говорить о тех, кто приобретает первую фотокамеру. А ведь размер матрицы еще и на фокусном расстоянии сказывается, так что учитывать при выборе камеры действительно нужно очень многое.
Итак, мы решили разобраться в различных типах матриц, чтобы расставить все по местам. Но для начала нужно уточнить, как именно размер матрицы влияет на эффективное фокусное расстояние.
Фокусное расстояние
Итак, мы уже выяснили, что размер матрицы связан с фокусным расстоянием, то есть с тем, какой именно объектив подойдет вашей камере. Если вы приобретаете компактный девайс с не съемным объективом, проблема сама собой отпадает, то есть с позиции покупателя это гораздо проще.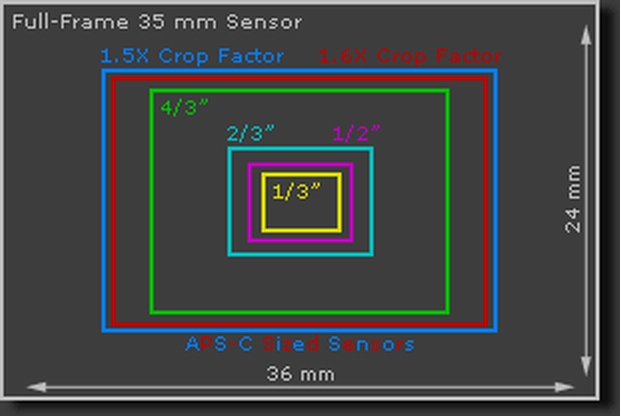 Но не просто так профессионалы выбирают именно те камеры, где объективы можно менять. Любой объектив должен иметь поле (круг) изображения или диаметр света, который существует в объективе и который покрывает размер матрицы. Есть одно исключение, к которому мы вернемся позже.
Но не просто так профессионалы выбирают именно те камеры, где объективы можно менять. Любой объектив должен иметь поле (круг) изображения или диаметр света, который существует в объективе и который покрывает размер матрицы. Есть одно исключение, к которому мы вернемся позже.
Итак, встроенные или нет, объективы всегда помечены реальным фокусным расстоянием, а не эффективным фокусным расстоянием, которое вы получите при использовании на той или иной камере. Но проблема в том, что различные объективы с различной маркировкой могут в итоге обеспечить одно и то же фокусное расстояние для работы. Почему? Потому что они предназначены для разных матриц. Именно поэтому производители помимо маркировки указывают эквивалент, где основным расстоянием считается 35мм или полнокадровая матрица.
Вот — один из примеров: камера с матрицей меньше чем полнокадровая вполне может использоваться с 18-55мм объективом, но на деле фокусное расстояние, которое вы получите будет ближе к 27-82мм. Это все происходит потому, что матрица не достаточно велика, чтобы использовать объектив точно так же как смог бы полнокадровый. Из-за того, что периферическое пространство внутри объектива не принимается в расчет, получается тот же эффект как от использования объектива с большим фокусным расстоянием.
Из-за того, что периферическое пространство внутри объектива не принимается в расчет, получается тот же эффект как от использования объектива с большим фокусным расстоянием.
В компактных камерах может был установлен 19мм объектив, но из-за размера матрицы, который меньше фуллфрейма, вы получите в итоге большее фокусное расстояние, около 28мм. Точная длина определяется кроп-фактором, то есть числом, на которое нужно увеличить данное под фуллфрейм фокусное расстояние, чтобы выяснить какое расстояние получится на той или иной камере.
Размеры матриц
1/2.3 дюйма
Размер такой матрицы примерно 6.3 x 4.7 мм. Это — самая маленькая матрица, которую можно найти в современных камерах, и чаще всего — в бюджетных компактных моделях. Разрешение такой матрицы составляет, как правило, 16-20 Мп.
По крайней мере такой расклад был самым популярным какое-то время назад. Сегодня многие производители стали делать больший упор на любительские фотоаппараты с большими матрицами, так что и размер такой не так распространен как ранее.
Однако, преимущество в том, что такой размер позволяет получить компактную камеру и использовать ее с длиннофокусными объективами, например компактными суперзумами. А большая матрица значит, что и объектив понадобится больший.
При хорошем освещении такие камеры могут предоставить неплохой результат, но для более придирчивых фотографов они точно не подойдут, поскольку при низкой освещенности будут зернить.
1/1.7 дюймов
Размер этих матриц 7.6 x 5.7мм. С такой матрицей гораздо проще выделить объект съемки из фона, и соответственно, производительность в плане деталей как в тени, так и на свету. Так что использовать их можно уже в более разнообразных условиях. Раньше такие камеры были самыми распространенными среди любителей, но сейчас их место стремительно занимают дюймовые матрицы, о которых речь и пойдет дальше.
А вот 1/1.7 дюймовые матрицы используются в некоторых относительно устаревших камерах Q-серии Pentax.
Дюймовые матрицы
Размер дюймовой матрицы 13. 2мм x 8.8мм. Сегодня такие матрицы очень популярны на различных типах камер, размер позволяет им оставаться легкими и компактными. Логично, что самый популярный способ применения для дюймовой матрицы — это карманные любительские камеры, на которых объектив будет лимитирован 24-70мм или 24-100мм (если брать эквивалент 35мм). Однако, на некоторых суперзум камерах он тоже используется?, примеры — это Sony RX10 III и Panasonic FZ2000.
2мм x 8.8мм. Сегодня такие матрицы очень популярны на различных типах камер, размер позволяет им оставаться легкими и компактными. Логично, что самый популярный способ применения для дюймовой матрицы — это карманные любительские камеры, на которых объектив будет лимитирован 24-70мм или 24-100мм (если брать эквивалент 35мм). Однако, на некоторых суперзум камерах он тоже используется?, примеры — это Sony RX10 III и Panasonic FZ2000.
Гораздо лучше дюймовая матрица нам знакома по камерам Nikon серии 1, например Nikon 1 J5 — отличной и легкой камере, которая способна делать отличные фото и снимать 4К видео. Такую матрицу можно встретить даже среди смартфонов — Panasonic CM1.
Камеры с дюймовой матрицей способны показать результаты, значительно отличные от предыдущих вариантов. Качество их будет высоким, а даже компактные камеры, как правило, имеют широкую максимальную апертуру, так что на матрицу попадает достаточно света, потому и фотографии выходят четкими и резкими.
Частично, это результат технологии, а не только размера матрицы. Матрицы современного производства могут более эффективно захватывать свет.
Матрицы современного производства могут более эффективно захватывать свет.
Микро 4/3
Матрица микро 4/3 имеет физический размер 17.3 x 13мм. Этот формат используется в компактных зеркалках и беззеркалках Olympus и Panasonic. Они ненамного больше по размеру, чем дюймовые матрицы, но меньше чем APS-C, речь о которых пойдет ниже.
По сути, микро 4/3 — это четверть размера полнокадровой матрицы, так что считать для нее активное фокусное расстояние предельно просто: достаточно умножить фокусное расстояние на 2.
Иными словами, 17мм объектив на камере с матрицей микро 4/3 обеспечит фокусное расстояние такое же, как 34мм объектив на полнокадровой матрице. По аналогии, 12-35мм даст 24-70мм и так далее.
На камере Lumix DMC-LX100 используется матрица микро 4/3 разрешением 12.8 Мп. Это — одна из компактных цифровых камер, которые обладают большим количеством функций и небольшим размером. Камера оснащена объективом Leica с фокусным расстоянием 24-75мм.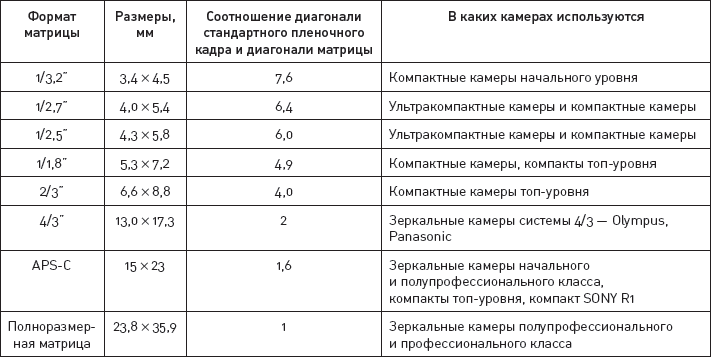
APS-C
Средний физический размер такой матрицы 23.5 x 15.6мм. Такая матрица используется на зеркальных камерах для начинающих и любительских камерах, а сейчас и на многих беззеркалках. Матрица APS-C обеспечивает отличный баланс между качеством изображения, размером и вариативностью в плане совместимости с различными объективами.
Не все APS-C матрицы одинаковы по размеру, ведь это зависит от производителя тоже. Например, матрицы APS-C на камерах Canon физически немного меньше чем те, что установлены в Nikon и Sony, таким образом ее кроп-фактор равен 1.6x, а не 1.5x. В любом случае, APS-C — это всегда отличный вариант и профессиональные фотографы нередко предпочитают его для съемок природы и спортивных мероприятий, потому что благодаря кроп-фактору появляется возможность “приблизиться” к объекту съемки имеющимся объективом.
APS-C доступны на некоторых компактных камерах, например Fujifilm X100F, это обеспечивает высокое качество для фотографий на портативных камерах, особенно в комплекте с объективами с постоянным фокусным расстоянием. 23мм объектив на Fujifilm X100F, имеет широкую максимальную апертуру, потому с помощью этой камеры можно без труда добиться узкой глубины резкости.
23мм объектив на Fujifilm X100F, имеет широкую максимальную апертуру, потому с помощью этой камеры можно без труда добиться узкой глубины резкости.
APS-H
Размер матриц APS-H как правило равен 26.6 x 17.9мм. Сегодня этот формат практически не встречается, и ассоциируется только с устаревшими моделями Canon EOS-1D (EOS-1D Mark III и Mark IV). Сейчас, правда, в этой серии используются фуллфреймы.
Поскольку APS-H больше чем APS-C, но меньше полнокадровой матрицы, кроп-фактор, соответственно равен 1.3х, потому 24мм объектив обеспечит на такой камере фокусное расстояние приблизительно 31мм.
Одна из последних фотокамер, где можно встретить такую матрицу — это Sigma sd Quattro H. Однако и Canon решили не отказываться от APS-H совсем, и предпочли применить эту матрицу для камер наблюдения, а не для зеркальных фотоаппаратов.
Фуллфрейм
36 x 24мм она же фуллфрейм, она же полнокадровая матрица и она же примерно такая же по размеру как негатив пленочной фотографии. Используются полнокадровые матрицы на любительских и профессиональных камерах и считаются самым удобным вариантом для съемок. Размер такой матрицы позволяет ей принимать на себя больше света, вследствие чего и фото получаются выше по качеству чем с меньшими матрицами. Соответственно, и когда речь идет о количестве пикселей, выбор больше. А разрешение полнокадровых матриц варьируется от 12 до 50Мп.
Используются полнокадровые матрицы на любительских и профессиональных камерах и считаются самым удобным вариантом для съемок. Размер такой матрицы позволяет ей принимать на себя больше света, вследствие чего и фото получаются выше по качеству чем с меньшими матрицами. Соответственно, и когда речь идет о количестве пикселей, выбор больше. А разрешение полнокадровых матриц варьируется от 12 до 50Мп.
Кроп-фактор, конечно, в случае с полнокадровой матрицей значения не имеет, так как маркировка объектива будет соответствовать активному фокусному расстоянию. Однако же, некоторые объективы, созданные под APS-C матрицы все равно можно использовать с фуллфреймами, но разрешение будет ограничено (камера обрежет углы, чтобы избежать виньетирования). Но проверять совместимость, разумеется, нужно всегда, иначе есть риск повредить зеркало.
Средняя (медиум) матрица
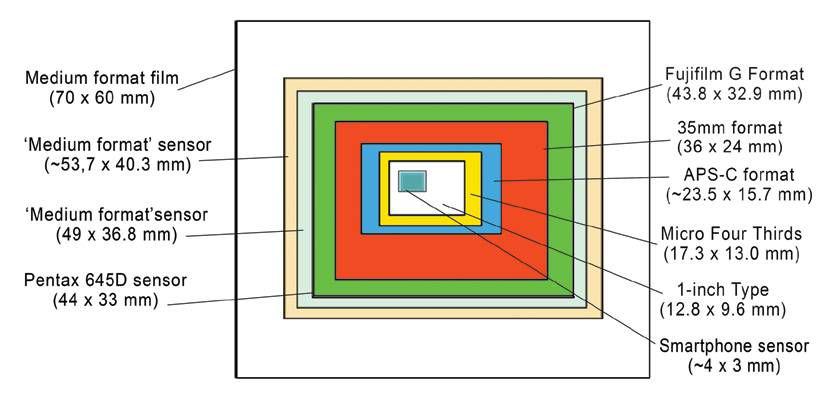
44мм x 33мм — размер такой матрицы. Это, очевидно, больше фуллфрейма и с момента появления такие матрицы вызвали оживленный интерес и дискуссии. Они использованы в камерах Fujifilm GFX 50S, Hasselblad X1D и Pentax 645Z, последняя немного старше остальных. Применяются они в основном, исключительно профессиональными фотографами в силу цены таких камер и их специфики.
Они использованы в камерах Fujifilm GFX 50S, Hasselblad X1D и Pentax 645Z, последняя немного старше остальных. Применяются они в основном, исключительно профессиональными фотографами в силу цены таких камер и их специфики.
Не факт, что на этом развитие матриц как таковых остановится, но пока что это — все доступные на рынке типы матриц, а какая подойдет для ваших фото интересов, решать только вам.
Что важнее размер матрицы фотоаппарата или количество мегапикселей?
Физический размер матрицы фотоаппарата, мегапиксели и качество снимков
По мере развития цифровой фото и видеотехники число мегапикселей, которыми производители приманивают покупателей, становится все больше. Но мало кто знает, что на самом деле для получения качественных фотографий гораздо важнее не разрешение, а физический размер самой матрицы.
Давайте разберем понятие мегапиксели. Пиксель — это одна маленькая точка из миллиона других, из которых состоит изображение.
Эти точки разные по размеру. Применительно к цифровой матрице, каждый пиксель — это миниатюрный датчик, на который при фотосъемке попадает свет, затем он преобразуется в цифровой сигнал и в таком виде передается в компьютер фотоаппарата. Таких датчиков на матрице огромное количество. Чем больше размер самой матрицы, тем больше размер каждого пикселя и их общее количество. Поэтому зависимость между матрицей и качеством снимков – самая прямая.
Вроде бы логично было бы писать эту площадь в виде длины и ширины, и желательно в миллиметрах. Но поскольку почти все параметры цифровой техники пришли к нам из-за границы, принято указывать размер матрицы в так называемых обратных дюймах, т.е. дробью, где в числителе единица, а в знаменателе – дюймовый размер матрицы. Например: 1/3.2 , 1/2.7 и т.д.
Большинству покупателей эти цифры мало о чем говорят.
Как правило, чем дешевле камера, тем меньше у нее физический размер матрицы и тем хуже качество сделанных ею фотографий.

Среди дорогих компактных камер иногда можно встретить модели с матрицей 2/3 , что обеспечивает неплохую детализацию снимков и достаточно высокую светочувствительность.
Матрицы 1/5 или 1/6 мы найдем в большинстве бюджетных зеркальных камер, это примерно половина кадра пленки 35 мм. Во многом именно за счет размера матрицы фотографии, сделанные зеркалкой, обычно выгодно отличаются от тех, которые сняты компактами.
Есть еще полнокадровые матрицы (36х24 мм), которые по размеру соответствуют полному кадру 35 мм, и матрицы среднего формата (60х45 мм), которые больше этого стандартного кадра и применяются в дорогих зеркальных камерах.
Итак, на что же, собственно, влияет размер матрицы?
Первое – на размер и вес самой камеры. Фотоаппараты с небольшими матрицами компактны, их можно носить в кармане.
Камеры с большими матрицами, например, средний формат, приходится таскать в специальных кофрах, а то и вовсе использовать только в студии.
Второе – на увеличение цифрового шума — или, как еще по старинке говорят, зерна — на ваших снимках. «Шумные» фотографии выглядят так, будто изображение разбито на множество заметных цветных точек. Вид у них неопрятный, грязноватый.
Появление шума обусловлено тем, что на большую по площади матрицу попадает больше света, чем на маленькую. В результате передаваемый ею полезный сигнал будет лучшего качества, а отсюда – и лучшая проработка деталей, и более качественная цветопередача, и большая яркость картинки.
Кроме того, датчики большой матрицы расположены дальше друг от друга и изоляция между ними лучше, поэтому меньше пробивающих эту изоляцию токов, которые создают помехи, ухудшающие качество фотографий.
Отсюда, кстати, следует, что большое разрешение (те самые большие мегапиксели) при маленьком размере матрицы – скорее вредно, чем полезно.
Что будет, если на матрицу одного размера впихнуть 8 000 000 пикселей и 12 000 000? Во втором случае это приведет к уменьшению размера датчиков, ухудшению слоя изоляции между ними — и увеличению цифрового шума.
От разрешения матрицы в мегапикселях зависит то, какого размера снимки вы сможете напечатать без заметной потери качества. Разрешения 8 мегапикселей достаточно для печати фотографий формата А4 (альбомный лист). И при малом размере матрицы такое разрешение еще не приводит к заметному цифровому шуму.
Выбирая себе фотоаппарат, обязательно обращайте внимание на физический размер матрицы, желательно чтобы он был максимально большим, насколько вы сможете себе позволить по финансам. От этого напрямую зависит качество сделанных фотографий, конечно если вы выберите зеркальную камеру, советую вам не покупать стандартный «китовый» объектив, который предлагают чаще всего в комплекте. Так как оптически он очень слабый и не надежный.
Так как оптически он очень слабый и не надежный.
Но будьте готовы, что зеркальная камера с хорошим объективом будет стоить дороже компактного фотоаппарата да и будет не совсем миниатюрной.
Так что смотрите сами, что для вас важнее. Любые вопросы по фототехнике вы можете смело задать нашим фотографам:
+375-29-122-92-40 (Viber)
+375-29-122-92-40 (whatsApp)
E-mail: [email protected]
Skype: sigma-by
Пишите в чат фотографу!
Какой размер матрицы фотоаппарата лучше: таблица размеров
Влияние размера матрицы фотоаппарата на качество съемки
Матрица цифрового фотоаппарата — это тот узел фотокамеры, в котором непосредственно формируется изображение. Матрица представляет микросхему с пикселями. При попадании фотона на пиксель образуется сигнал, тем больший, чем большее кол-во фотонов света попадает. Возникающие электрические сигналы обрабатываются процессором камеры и архивируются на карту памяти.
Матрица представляет микросхему с пикселями. При попадании фотона на пиксель образуется сигнал, тем больший, чем большее кол-во фотонов света попадает. Возникающие электрические сигналы обрабатываются процессором камеры и архивируются на карту памяти.
Как выбрать матрицу фотоаппарата и что такое разрешение матрицы фотоаппарата?
От количества пикселей зависит разрешение изображения и уровень шумов. Чем больше количество пикселей на матрице, тем лучше детализация.
На матрице находятся 2592 точки по ширине, 1944 точки по высоте. При перемножении этих величин получается примерно 5 млн пикселей. Такая камера имеет 5 мПа.
Обратите внимание
Пиксели преобразуют свет в ч/б изображение, чтобы картинка получилась цветной используются цветные фильтры. Каждый фильтр фильтрует лучи своего цвета, строя изображение при помощи процессора. Процессор рассчитывает цвет пикселя с учетом полной информации соседних ячеек.
Матрицы, покрытые фильтрами, цвет пропускают хуже, из-за этого изображение получается размытым. Процессор исправляет автоматически или ручной корректировкой четкость изображения, контрастность, яркость, снижает количество шумов на фото.
Процессор исправляет автоматически или ручной корректировкой четкость изображения, контрастность, яркость, снижает количество шумов на фото.
Типы матриц
Кроме количества пикселей большое значение имеет тип матрицы. Какой лучше тип матрицы фотоаппарата? Здесь каждый выбирает сам.
- ПЗС-матрицы (CCD) — устройства со светочувствительными фотодиодами. ПЗС-матрица выпускается большинством ведущих производителей фототехники.
- КМОП-матрицы (CMOS) отличаются малым энергопотреблением. Матрицы этой технологии могут иметь систему автонастройки времени экспонирования для отдельного пикселя, что позволяет увеличить фотошироту.
- Live-MOS матрицы разрабатывались компанией Panasonic, а в фотоаппаратах впервые появилась у фирмы Olympus. В наше время эту матрицу с возможностью визирования по экрану применяют все крупные производители. Благодаря ей можно получить живое изображение без увеличения шумов.
Есть и другие виды матриц: DX-матрица, матрица Nikon RGB и пр.
ПЗС матрицы собирают картинку в аналоговой версии, а затем оцифровывают. CMOS матрицы оцифровывают каждый пиксель по отдельности. На данный момент на этих матрицах выпускаются больше 90% фотоаппаратов. Технология CMOS дала возможность снимать видео и оснастить этой функцией современные фотоаппараты.
Какая лучше
Очень важный параметр при рассмотрении матрицы — это размер матрицы фотоаппарата в сантиметрах или дюймах. Грубо говоря, физический размер матрицы фотоаппарата — это величина диагонали прямоугольника матрицы (эти характеристики можно найти в инструкции). Большой пиксель матрицы имеет более сильную чувствительность к свету.
Чем меньше пиксель, тем меньше фотонов света он уловит. При равном кол-ве матриц более качественно, с меньшим кол-вом шумов будет снимать камера с большей по размеру матрицей, а значит, большим размером пикселя. Чем больше размер матрицы цифрового фотоаппарата, тем чище от шумов будет съемка в условиях недостаточной освещенности.
При одинаковой пиксельности, площадь каждого пикселя более крупной матрицы естественно больше, а значит светочувствительность и цветопередача у Full Frame матрицы куда лучше.
Это не все характеристики матрицы фотоаппарата. Чувствительность матрицы ISO влияет на качество съемки в темное время суток или при плохой освещенности.
Чем больше ISO можно поставить в настройках, тем лучше получится качество снимков в темноте.
При большой чувствительности может проявиться шум в виде зернистости.
Сравнение размеров матриц
Какой размер матрицы фотоаппарата лучше? Размер матрицы — это параметр аналогичный размеру негатива в пленочном фотоаппарате. Full Frame лучшая матрица имеет размеры близкие к стандартному кадру 35мм негатива. Кадр на пленке имеет размеры 24 на 36мм.
Большинство цифровых компактных фотоаппаратов до 7 мПа имеют матрицу меньшего размера 7,2 на 3,5мм, а больше 7мм — еще более меньшую матрицу 4 на 5мм.
Таким образом, площадь матрицы компактной камеры в 25 р. меньше площади пленочного кадра. Матрица зеркального аппарата более продвинутого уровня, меньше площади кадра в полтора-два раза.
Топовые зеркальные камеры отличаются Full Frame матрицей.
Важно
Какая матрица лучше для фотоаппарата? Размер матрицы может варьироваться от 1/3.2″ (4.0 * 5.
4мм, такие устройства устанавливаются в недорогих бюджетных аппаратах) до 4 / 3″ (18 * 13,5мм , — дорогостоящие цифровые камеры). Есть DX, APS-Cформат (24 * 18 мм для зеркалок).
Самые крупные полнокадровые (36 * 24 мм), среднеформатные (60 * 45 мм) матрицы устанавливаются на более дорогие профессиональные камеры.
Кроп-фактор — соотношение матриц
Кроп-фактор – есть ни что иное как соотношение величины кадра пленки 35mm к величине интегральной микросхемы из светочувствительных элементов фотоаппарата (Kf = диагональ 35мм≈43,3мм / диагональ микросхемы).
Пользуясь кроп-фактором, доступно знать равнозначную видимую дистанцию объектива на своей камере и соотносить объективы другой цифровой фототехники с зеркалами. Этот демонстратор, указывающий на различие меж величинами матрицы в цифровой фотокамере у вас и классическим кадром на пленке при формате 35mm.
Этот демонстратор, указывающий на различие меж величинами матрицы в цифровой фотокамере у вас и классическим кадром на пленке при формате 35mm.
Такой фактор важен прежде всего для вычисления расстояния фокуса объектива, когда его нужно установить на различные камеры, и в действительности это очень важно.
Если термин и представляется сложным, в реальности это совершенно не так тяжело.
Ибо кроп-фактор в фотопромысле давно занял важные позиции; обязательно требуется правильное понимание, как возможно пользовать его для сравнения качества работы объективов настолько, чтоб не заострять внимание непосредственно на фотокамере.
Подобные показатели помогут исключить всевозможные разногласия и сумятицу. Освоив понятие кроп-фактора, вам станет доступно производить точный подбор требующихся объективов, совершая покупку и пользуясь цифровой зеркальной фототехникой.
Матрица и глубина резкости
Еще один параметр напрямую зависит от матрицы. Чем больше размер, тем меньше глубина резкости. Именно поэтому компактной камерой можно снимать до горизонта, а зеркалка вдобавок прекрасно справится с выделением объекта и макросъемкой.
Кроп-фактор — параметр соотношения диагонали кадра, который соответствует 35мм пленки и диагонали размера матрицы.
На практике, это значит, что чем меньше размер матрицы, тем больше будет глубина резкости.
Портретная съемка поэтому лучше удастся на камере с большим размером матрицы, а при маленькой матрице задний фон будет оставаться четким независимо от вашего желания.
Это важно для фотографов, которые в ряде случаев предпочитают размытый фон, например, при съемке портретов. Чем больше КРОП фактор, тем менее вероятность получить качественную размытость.
Таким образом, покупателю самому нужно решить проблему какая должна быть матрица на его фотоаппарате. Что важнее компактность или большие размеры камеры, глубина резкости или возможность снимать размытый фон. Идеальных решений пока не разработано. А при равном количестве пикселей нужно выбирать больший размер матрицы. Чем она крупнее, чем меньше шум при недостатке света.
Что важнее компактность или большие размеры камеры, глубина резкости или возможность снимать размытый фон. Идеальных решений пока не разработано. А при равном количестве пикселей нужно выбирать больший размер матрицы. Чем она крупнее, чем меньше шум при недостатке света.
Источник: http://StuffOnly.net/uroki/osnovy-fotografii/teoriya/matrix.html
Размер матрицы все, что нужно знать
Раньше было вполне логичным, что покупая компактную камеру, вы получали небольшую матрицу, а если выбирали крупногабаритную зеркалку со сменными объективами, матрица на ней была значительно больше. Это сказывалось на качестве фотографий, поскольку чем больше матрица, тем более детализированы были изображения.
Сейчас это в принципе, тоже в какой-то мере актуально, матрица — это самая дорогая часть камеры в плане производства, и чем больше матрица, тем и камера, соответственно, дороже. Потому на дорогие камеры обычно не устанавливаются матрицы 1/2.3 дюймовые, а на дешевых, соответственно, не найти полнокадровую.
Но надо сказать, что сейчас многие производители стали предлагать компактные камеры с относительно большими матрицами, точно так же как и камеры под сменные объективы с меньшими матрицами. Так что разобраться в ситуации, пожалуй, стало сложнее. Небольшие матрицы способны отлично срабатывать в различных условиях, и даже имеют некоторые преимущества перед большими.
Совет
За последние годы и сама технология создания матриц значительно продвинулась вперед, так что сегодня большое количество предлагаемых вариантов может смутить даже опытного пользователя, что уж говорить о тех, кто приобретает первую фотокамеру. А ведь размер матрицы еще и на фокусном расстоянии сказывается, так что учитывать при выборе камеры действительно нужно очень многое.
Итак, мы решили разобраться в различных типах матриц, чтобы расставить все по местам. Но для начала нужно уточнить, как именно размер матрицы влияет на эффективное фокусное расстояние.
Фокусное расстояние
Итак, мы уже выяснили, что размер матрицы связан с фокусным расстоянием, то есть с тем, какой именно объектив подойдет вашей камере.
Если вы приобретаете компактный девайс с не съемным объективом, проблема сама собой отпадает, то есть с позиции покупателя это гораздо проще. Но не просто так профессионалы выбирают именно те камеры, где объективы можно менять.
Любой объектив должен иметь поле (круг) изображения или диаметр света, который существует в объективе и который покрывает размер матрицы. Есть одно исключение, к которому мы вернемся позже.
Итак, встроенные или нет, объективы всегда помечены реальным фокусным расстоянием, а не эффективным фокусным расстоянием, которое вы получите при использовании на той или иной камере.
Но проблема в том, что различные объективы с различной маркировкой могут в итоге обеспечить одно и то же фокусное расстояние для работы. Почему? Потому что они предназначены для разных матриц.
Именно поэтому производители помимо маркировки указывают эквивалент, где основным расстоянием считается 35мм или полнокадровая матрица.
Вот — один из примеров: камера с матрицей меньше чем полнокадровая вполне может использоваться с 18-55мм объективом, но на деле фокусное расстояние, которое вы получите будет ближе к 27-82мм.
Обратите внимание
Это все происходит потому, что матрица не достаточно велика, чтобы использовать объектив точно так же как смог бы полнокадровый.
Из-за того, что периферическое пространство внутри объектива не принимается в расчет, получается тот же эффект как от использования объектива с большим фокусным расстоянием.
В компактных камерах может был установлен 19мм объектив, но из-за размера матрицы, который меньше фуллфрейма, вы получите в итоге большее фокусное расстояние, около 28мм. Точная длина определяется кроп-фактором, то есть числом, на которое нужно увеличить данное под фуллфрейм фокусное расстояние, чтобы выяснить какое расстояние получится на той или иной камере.
Размеры матриц
1/2.3 дюйма
Размер такой матрицы примерно 6. 3 x 4.7 мм. Это — самая маленькая матрица, которую можно найти в современных камерах, и чаще всего — в бюджетных компактных моделях. Разрешение такой матрицы составляет, как правило, 16-20 Мп.
3 x 4.7 мм. Это — самая маленькая матрица, которую можно найти в современных камерах, и чаще всего — в бюджетных компактных моделях. Разрешение такой матрицы составляет, как правило, 16-20 Мп.
По крайней мере такой расклад был самым популярным какое-то время назад. Сегодня многие производители стали делать больший упор на любительские фотоаппараты с большими матрицами, так что и размер такой не так распространен как ранее.
Однако, преимущество в том, что такой размер позволяет получить компактную камеру и использовать ее с длиннофокусными объективами, например компактными суперзумами. А большая матрица значит, что и объектив понадобится больший.
При хорошем освещении такие камеры могут предоставить неплохой результат, но для более придирчивых фотографов они точно не подойдут, поскольку при низкой освещенности будут зернить.
1/1.7 дюймов
Размер этих матриц 7.6 x 5.7мм. С такой матрицей гораздо проще выделить объект съемки из фона, и соответственно, производительность в плане деталей как в тени, так и на свету.
Так что использовать их можно уже в более разнообразных условиях.
Раньше такие камеры были самыми распространенными среди любителей, но сейчас их место стремительно занимают дюймовые матрицы, о которых речь и пойдет дальше.
А вот 1/1.7 дюймовые матрицы используются в некоторых относительно устаревших камерах Q-серии Pentax.
Дюймовые матрицы
Размер дюймовой матрицы 13.2мм x 8.8мм. Сегодня такие матрицы очень популярны на различных типах камер, размер позволяет им оставаться легкими и компактными.
Логично, что самый популярный способ применения для дюймовой матрицы — это карманные любительские камеры, на которых объектив будет лимитирован 24-70мм или 24-100мм (если брать эквивалент 35мм).
Однако, на некоторых суперзум камерах он тоже используется?, примеры — это Sony RX10 III и Panasonic FZ2000.
Важно
Гораздо лучше дюймовая матрица нам знакома по камерам Nikon серии 1, например Nikon 1 J5 — отличной и легкой камере, которая способна делать отличные фото и снимать 4К видео.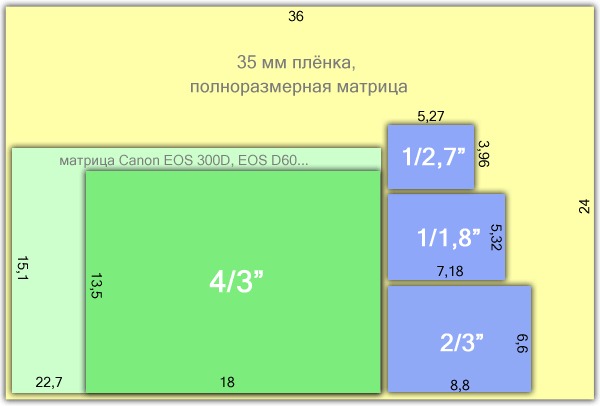 Такую матрицу можно встретить даже среди смартфонов — Panasonic CM1.
Такую матрицу можно встретить даже среди смартфонов — Panasonic CM1.
Камеры с дюймовой матрицей способны показать результаты, значительно отличные от предыдущих вариантов. Качество их будет высоким, а даже компактные камеры, как правило, имеют широкую максимальную апертуру, так что на матрицу попадает достаточно света, потому и фотографии выходят четкими и резкими.
Частично, это результат технологии, а не только размера матрицы. Матрицы современного производства могут более эффективно захватывать свет.
Микро 4/3
Матрица микро 4/3 имеет физический размер 17.3 x 13мм. Этот формат используется в компактных зеркалках и беззеркалках Olympus и Panasonic. Они ненамного больше по размеру, чем дюймовые матрицы, но меньше чем APS-C, речь о которых пойдет ниже.
По сути, микро 4/3 — это четверть размера полнокадровой матрицы, так что считать для нее активное фокусное расстояние предельно просто: достаточно умножить фокусное расстояние на 2.
Иными словами, 17мм объектив на камере с матрицей микро 4/3 обеспечит фокусное расстояние такое же, как 34мм объектив на полнокадровой матрице. По аналогии, 12-35мм даст 24-70мм и так далее.
По аналогии, 12-35мм даст 24-70мм и так далее.
На камере Lumix DMC-LX100 используется матрица микро 4/3 разрешением 12.8 Мп. Это — одна из компактных цифровых камер, которые обладают большим количеством функций и небольшим размером. Камера оснащена объективом Leica с фокусным расстоянием 24-75мм.
APS-C
Средний физический размер такой матрицы 23.5 x 15.6мм. Такая матрица используется на зеркальных камерах для начинающих и любительских камерах, а сейчас и на многих беззеркалках. Матрица APS-C обеспечивает отличный баланс между качеством изображения, размером и вариативностью в плане совместимости с различными объективами.
Не все APS-C матрицы одинаковы по размеру, ведь это зависит от производителя тоже. Например, матрицы APS-C на камерах Canon физически немного меньше чем те, что установлены в Nikon и Sony, таким образом ее кроп-фактор равен 1.6x, а не 1.5x.
Совет
В любом случае, APS-C — это всегда отличный вариант и профессиональные фотографы нередко предпочитают его для съемок природы и спортивных мероприятий, потому что благодаря кроп-фактору появляется возможность “приблизиться” к объекту съемки имеющимся объективом.
APS-C доступны на некоторых компактных камерах, например Fujifilm X100F, это обеспечивает высокое качество для фотографий на портативных камерах, особенно в комплекте с объективами с постоянным фокусным расстоянием. 23мм объектив на Fujifilm X100F, имеет широкую максимальную апертуру, потому с помощью этой камеры можно без труда добиться узкой глубины резкости.
APS-H
Размер матриц APS-H как правило равен 26.6 x 17.9мм. Сегодня этот формат практически не встречается, и ассоциируется только с устаревшими моделями Canon EOS-1D (EOS-1D Mark III и Mark IV). Сейчас, правда, в этой серии используются фуллфреймы.
Поскольку APS-H больше чем APS-C, но меньше полнокадровой матрицы, кроп-фактор, соответственно равен 1.3х, потому 24мм объектив обеспечит на такой камере фокусное расстояние приблизительно 31мм.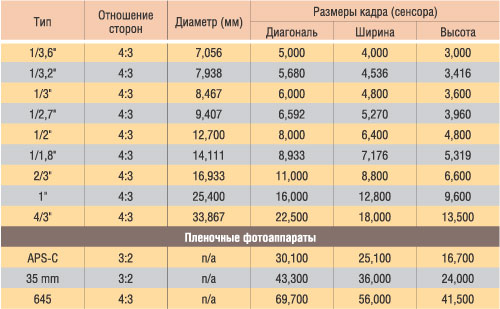
Одна из последних фотокамер, где можно встретить такую матрицу — это Sigma sd Quattro H. Однако и Canon решили не отказываться от APS-H совсем, и предпочли применить эту матрицу для камер наблюдения, а не для зеркальных фотоаппаратов.
Фуллфрейм
36 x 24мм она же фуллфрейм, она же полнокадровая матрица и она же примерно такая же по размеру как негатив пленочной фотографии. Используются полнокадровые матрицы на любительских и профессиональных камерах и считаются самым удобным вариантом для съемок.
Размер такой матрицы позволяет ей принимать на себя больше света, вследствие чего и фото получаются выше по качеству чем с меньшими матрицами. Соответственно, и когда речь идет о количестве пикселей, выбор больше.
А разрешение полнокадровых матриц варьируется от 12 до 50Мп.
Кроп-фактор, конечно, в случае с полнокадровой матрицей значения не имеет, так как маркировка объектива будет соответствовать активному фокусному расстоянию.
Однако же, некоторые объективы, созданные под APS-C матрицы все равно можно использовать с фуллфреймами, но разрешение будет ограничено (камера обрежет углы, чтобы избежать виньетирования).
Но проверять совместимость, разумеется, нужно всегда, иначе есть риск повредить зеркало.
Средняя (медиум) матрица
44мм x 33мм – размер такой матрицы. Это, очевидно, больше фуллфрейма и с момента появления такие матрицы вызвали оживленный интерес и дискуссии. Они использованы в камерах Fujifilm GFX 50S, Hasselblad X1D и Pentax 645Z, последняя немного старше остальных. Применяются они в основном, исключительно профессиональными фотографами в силу цены таких камер и их специфики.
Не факт, что на этом развитие матриц как таковых остановится, но пока что это — все доступные на рынке типы матриц, а какая подойдет для ваших фото интересов, решать только вам.
Источник: https://www.fotosklad.ru/expert/photo/article/razmer-matritsy-vse-chto-nuzhno-znat.html
Матрица цифрового фотоаппарата: типы, размер, разрешение, светочувствительность, чистка
Ни один фотоаппарат не может обойтись без матрицы. Современные модели оснащаются ей практически поголовно. Так произошло в момент, когда цифровые аналоги начали вытеснять устаревшие пленочные технологии.
Так произошло в момент, когда цифровые аналоги начали вытеснять устаревшие пленочные технологии.
Матрица фотоаппарата является одним из основных компонентов, без которых невозможна эксплуатация всего прибора в целом, ведь его роль если и не является ключевой, то, по крайней мере, может считаться одной из ведущих. Именно матрица отвечает за качество будущего снимка, цветопередачу, четкость, полноту кадра.
Как и другие важные элементы фототехники, матрица обладает рядом основных параметров, на которые обычно принято ориентироваться при выборе той или иной модели.
Типы матриц
Матрица цифрового фотоаппарата – это, в первую очередь, микросхема. Она преобразует световые лучи, которые, преломившись в системе линз и зеркал, попадают на нее.
В результате такого преображения получается электрический сигнал, который выводится в цифровом виде, образуя снимок. За весь этот процесс отвечают специальные фотодатчики, расположенные на самой плате.
Чем больше количество датчиков, чувствительных к свету, тем больше разрешение, и, как следствие, качество конечного снимка.
Встречаются матрицы следующих типов.
- ПЗС – тип матрицы фотоаппарата, который дословно расшифровывается как прибор зарядовой связи. В английском варианте – Charge-Coupled Device. Весьма известная аббревиатура, которая, впрочем, не так часто встречается в наши дни. Многие используют приборы, в основе которых лежат светодиоды, имеющие высокую светочувствительность, созданные на основе ПЗС системы, но, несмотря на широкую распространенность, данный вид микросхем все больше вытесняется более современным.
- КМОП-матрица. Формат матрицы, введенный в эксплуатацию в 2008 году. Впрочем, история создания данного формата уходит корнями в далекий 93-й, когда впервые была опробована технология APS. КМОП-матрица – это комплиментарный металл-оксид-полупроводник. Данная технология позволяет производить выборку отдельного пикселя почти так же, как и в стандартной системе памяти, к тому же, каждый пиксель оснащается дополнительным усилителем. Поскольку данная система является более современной, она зачастую оснащается автоматической подстройкой времени экспонирования каждого пикселя по отдельности.
 Данное улучшение позволяет получить полный кадр без потери боковых границ, а так же без потери верха и низа кадра. Полноразмерная матрица чаще всего бывает выполнена по технологии КМОП.
Данное улучшение позволяет получить полный кадр без потери боковых границ, а так же без потери верха и низа кадра. Полноразмерная матрица чаще всего бывает выполнена по технологии КМОП. - Существует еще один тип матрицы – Live-MOS-матрица. Ее выпустила фирма «Панасоник». Данная микросхема функционирует при помощи технологии, в основе которых лежит МОП. МОП-матрица позволяет делать качественные профессиональные снимки без высокого уровня шума, а также исключает перегрев.
Физический размер матрицы
Размер матрицы фотоаппарата – одна из ее важнейших характеристик. Как правило, его указывают в дюймах в виде дроби. Больший размер подразумевает меньшее количество шумов на конечном снимке. К тому же, чем больше физический размер, тем больше световых лучей способна зарегистрировать матрица. Объем и количество лучей напрямую влияют на качество передачи оттенков и полутонов.
Кроп-фактор — это соотношение размеров кадра пленочного фотоаппарата 35 мм к размерам матрицы цифрового фотоаппарата. Все дело в том, что процесс создания цифровой матрицы довольно дорогостоящий, и поэтому производители постарались максимально сократить ее размер.
Все дело в том, что процесс создания цифровой матрицы довольно дорогостоящий, и поэтому производители постарались максимально сократить ее размер.
Чаще всего кроп-фактор используют для замера наиболее точного расстояния фокуса у объектива, устанавливая его на различные приборы. Здесь вступает в игру такое понятие, как эквивалентное фокусное расстояние (ЭФР), которое вычисляется путем умножения фокусного расстояния (ФР) на кроп-фактор.
Так, объектив с полнокадровой матрицей (кроп=1) и объективом с ФР 50 мм зафиксирует такое же по размерам изображение, как и кропнутая матрица 1,6 с объективом с ФР 30 мм. В этом случае можно сказать, что ЭФР у этих объективов одинаковое.
Ниже приведена таблица, в которой можно провести сравнение, как меняется ЭФР в зависимости от кроп-фактора.
Количество мегапикселей и разрешение матрицы
Матрица сама по себе является дискретной. Она состоит более чем из миллиона элементов, которые и преобразовывают световой поток, идущий от линз. В характеристике каждой модели фотоаппарата можно отыскать такой параметр матричной платы как количество светочувствительных элементов или разрешение матрицы, измеряемое в мегапикселях.
Правда, здесь есть и обратная зависимость. Если физический размер матрицы меньше, то и количество мегапикселей должно быть пропорционально меньше, в противном случае не удастся избежать эффекта дифракции: фотографии будут замыленными, без четкости.
Чем больше размер пикселя, тем больше он способен зафиксировать лучей, падающих на него. Размер пикселей напрямую связан с размерами матрицы, и влияет, в основном, на широту кадра.
Обратите внимание
Чем больше количество мегапикселей с правильным соотношением размеров матрицы, тем больше лучей света смогу уловить датчики.
Количество зафиксированных лучей напрямую влияет на исходные параметры преобразуемого материала: резкость, цветность, объем, контрастность, фокус.
Таким образом, разрешение фотокамеры влияет на качество снимка. Зависимость разрешения от объема использующихся пикселей очевидна. В объективе при помощи сложной расстановки оптических элементов формируется необходимый световой поток, который потом матрица поделит на пиксели.
Оптические приборы тоже обладают собственным разрешением. Более того, если разрешение объектива достаточно мало, а передача двух светящихся точек, разделяемых одной темной, происходит как единого целого, то разрешение будет не столь отчетливо выделяться.
Происходит это именно из-за прямой зависимости и привязки к числу мегапикселей.
Если говорить о разрешении современных цифровых микросхем, то оно складывается из размера пикселя (от 2 до 8 мкм). На сегодняшний день на рынке представлены модели с показателями до 30 мп.
Светочувствительность
В фотоаппаратах по отношению к матрице принято использовать термин эквивалентной чувствительности. Связано это с тем, что подлинную чувствительность можно измерять различными способами в зависимости от множества параметров матрицы. Зато, применив усиление сигнала и цифровую обработку, пользователь может обнаружить высокие пределы чувствительности.
Зато, применив усиление сигнала и цифровую обработку, пользователь может обнаружить высокие пределы чувствительности.
Параметры светочувствительности демонстрируют возможность исходного материала преобразовываться из электромагнитных воздействий потока света в электрический двоичный сигнал. Проще говоря, показывать, сколько требуется света для получения объективного уровня электрического импульса на выходе.
Параметр чувствительности (ISO) чаще всего используется фотографами для демонстрации возможности съемки в условиях плохого освещения.
Увеличение чувствительности в параметрах прибора позволяет улучшить качество конечного снимка при необходимом значении диафрагмы и выдержки. ISO может достигать значения от нескольких десятков до тысяч и десятков тысяч единиц.
Негативной стороной высоких значений светочувствительности является появление «шумов», которые проявляются в виде эффекта зернистости кадра.
Как проводить чистку матрицы в домашних условиях
Битые пиксели не всегда могут быть таковыми на самом деле. В действительности, когда происходит смена объектива, на матрицу могут попасть частицы мусора, вызывающие эффект «битого пикселя». Чистка матрицы фотоаппарата нужна для профилактики этого эффекта, а также для более комфортной работы с прибором.
В действительности, когда происходит смена объектива, на матрицу могут попасть частицы мусора, вызывающие эффект «битого пикселя». Чистка матрицы фотоаппарата нужна для профилактики этого эффекта, а также для более комфортной работы с прибором.
Со временем, в особенности, если устройство эксплуатируется подолгу в различных погодных условиях, матрица может покрыться слоем пыли.
При нарушении герметичности в области крепления объектива на поверхность может попасть небольшое количество влаги, что тоже может негативно сказаться на качестве кадра.
Важно
Чистку можно доверить профессионалам из сервисного центра, а можно провести и самостоятельно, в домашних условиях.
Первый и самый простой способ очистки стеклянной поверхности кремниевой пластины микросхемы – сдувание пыли.
Для этого следует использовать самую обычную грушу для чистки объективов, она продается в любом крупном магазине бытовой техники. К сожалению, использование груши помогает только при снятии легкого налета небольших песчинок пыли.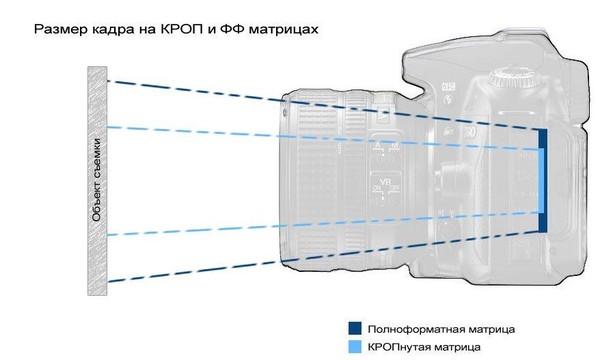
Для более крупных частиц, которые могли прилипнуть к поверхности, может потребоваться что-то более основательное.
Если груша не помогла справиться с пятнами на матрице, можно попробовать использовать специальный набор для очистки стеклянной поверхности. Стоит он несколько дороже, но эффективность очистки значительно выше.
- Первый пункт в очистке – использование специального пылесоса. Его сборка не занимает много времени и детально описана в инструкции к набору. На конце устройства находится мягкий наконечник, так что повреждение прибора во время работы исключено. Лучше всего будет прочистить при помощи пылесоса не только стеклянную поверхность, но и все скрытые полости, доступные для чистки.
- После уборки при помощи пылесоса можно начинать влажную уборку.
 Она осуществляется при помощи специальных щеточек, одна из которых влажная, другая сухая. Этот вид уборки нужен для пылинок, которые, будучи мокрыми, попали на поверхность стекла, и, высохнув, прикрепились к нему, создав эффект «битого пикселя». Влажная щетка пропитана специальным раствором, который эффективно удаляет засохшие песчинки и пылинки, не оставляя пятен и разводов. Необходимо проводить по стеклу плавными аккуратными движениями, лишь слегка нажимая на саму щетку. Оставшаяся влага довольно быстро испарится сама. Даже если после влажной уборки на стекле остается пара капель, то они прекрасно удаляются сухой щеточкой (кисточкой).
Она осуществляется при помощи специальных щеточек, одна из которых влажная, другая сухая. Этот вид уборки нужен для пылинок, которые, будучи мокрыми, попали на поверхность стекла, и, высохнув, прикрепились к нему, создав эффект «битого пикселя». Влажная щетка пропитана специальным раствором, который эффективно удаляет засохшие песчинки и пылинки, не оставляя пятен и разводов. Необходимо проводить по стеклу плавными аккуратными движениями, лишь слегка нажимая на саму щетку. Оставшаяся влага довольно быстро испарится сама. Даже если после влажной уборки на стекле остается пара капель, то они прекрасно удаляются сухой щеточкой (кисточкой). - Третий этап – финальный, проводим сухой щеточкой по матрице и убеждаемся, что она чистая.
После очистки можно попробовать сделать тестовый снимок, чтобы убедиться, что процедура прошла успешно. Для этого необходимо закрыть диафрагму до максимального значения и сделать снимок чистого белого листа, приведя объектив в состояние полной расфокусировки. Затем сравнить качество снимков до и после.
Затем сравнить качество снимков до и после.
Почистить матрицу зеркального фотоаппарата довольно просто, для этого не требуется каких-то глубоких знаний или большого опыта, достаточно желания, немного терпения и знания базовых принципов очистки высокоточной оптической техники.
Заключение
Матрица фотоаппарата является важнейшей деталью любой современной зеркалки. Без нее невозможно сделать снимок, а от ее параметров зависит дальнейшее использование устройства. Если параметры матрицы выбраны неправильно, фотоаппарат не будет оптимально справляться со своими задачами. Матрица не требует какого-то дополнительного ухода, кроме периодической чистки стеклянной поверхности.
Источник: http://Tehnika.expert/cifrovaya/fotoapparat/matrica.html
Какая матрица для фотоаппарата лучше
В 1981 году компания Sony представила миру первый цифровой фотоаппарат. Изобретатели создали цифровой заменитель плёнки — матрицу. Этот прорыв дал возможность делать тысячи снимков и сохранять их в цифровом виде. Качество изображения стало зависеть не только от оптики, но и от размеров и свойств матрицы.
Качество изображения стало зависеть не только от оптики, но и от размеров и свойств матрицы.
1
Что же это за свойства? Сначала вспомним, как формируется изображение. Матрица фотоаппарата — это решетка с плотной структурой. Она состоит из крошечных светочувствительных элементов — фотодиодов. Свет, собранный объективом, попадает на матрицу. Фотодиоды преобразуют этот свет в электрический заряд. Далее заряд поступает в процессор.
Он «читает» поступившие заряды и преобразует их в цифровой язык. После этого создается пиксель. Он хранит в себе информацию о яркости и цветовом оттенке, в виде цифр и битов. Каждый пиксель повторяя расположение фотодиода помещается на изображение. Миллионы крошечных пикселей формируют снимок, который записывается на карту памяти.
Матрица — это воспринимающая часть фотоаппарата.
Когда на неё попадают фотоны света, она преобразует их в электричество.
2
Теперь рассмотрим, какие параметры матрицы влияют на качество картинки:
- физический размер;
- размер фотодиода.

Два этих параметра влияют на:
- светочувствительность;
- резкость;
- разрешение;
- динамический диапазон цветов.
3
Стандартный размер 35-миллиметровой пленки был взят за основу при создании матрицы. Лучшие камеры обладают 35 мм (24х36 мм) матрицей. Такой размер позволяет захватить максимально много пространства в кадр. Большая матрица имеет ряд преимуществ. Но производство таких сенсоров относительно дорогое. Чтобы сделать технику доступнее, размеры матрицы начали уменьшать.
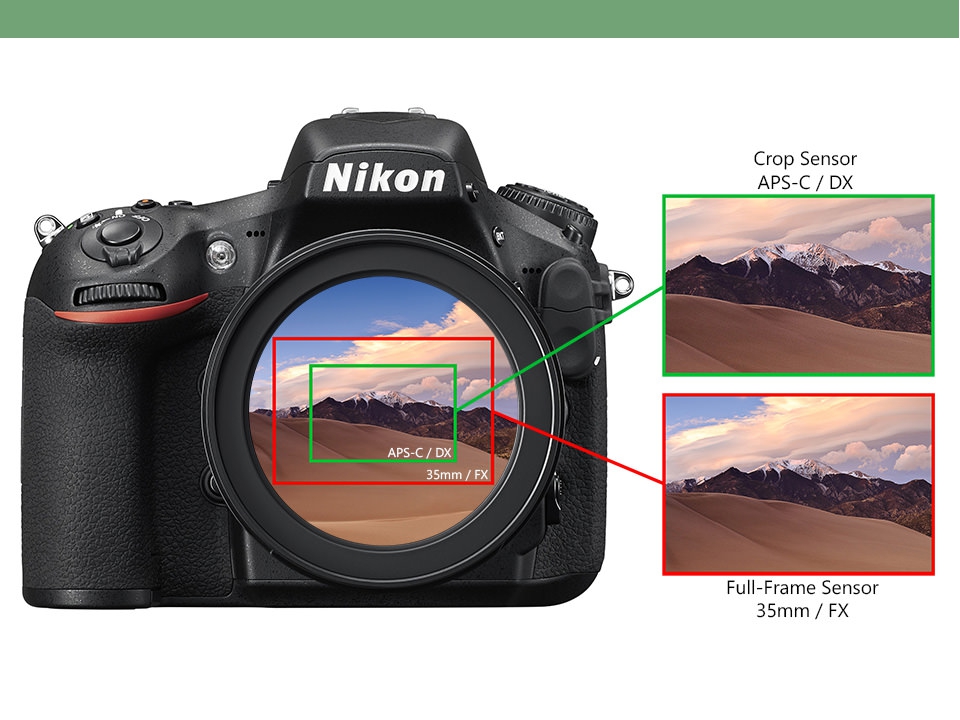
В любительской зеркальной камере она уменьшена в 1,5 раза – от размера 36х24 мм до размера 15,7х23,6 мм. «Уменьшение в 1,5 раза» называют кроп-фактором. В «мыльницах» матрица уменьшена в 5 раз от 35 мм. Чем меньше размер матрицы — тем меньше пространства она сможет захватить.
При одинаковом месте съемки маленькая матрица обрежет кадр.
Очень частое заблуждение, что меняется фокусное расстояние.
4
У каждой матрицы есть чувствительность. Она зависит от размера фотодиода. Чем больше фотодиод, тем больше «полезного» света он воспринимает. В последствии камера с большим фотодиодом позволяет:
- Фотографировать на больших ISO без цифрового шума.
- Использовать более короткую выдержку, чтобы получить резкое изображение.
5
В матрице с большими пикселями более широкий динамический диапазон цветов. Но нельзя увеличивать размер фотодиода на маленькой матрице. Если это сделать, то уменьшится количество мегапикселей (разрешение).
Посмотрите на характеристики двух камер. Canon 1Ds Mark II – полнокадровая, но из-за большого размера пикселя имеет максимальное разрешение, как и Nikon D7000/5100.
6
Так происходит, потому что разрешение определяется количеством пикселей на дюйм (ppi или dpi). Чем меньше размер фотодиода — тем больше пикселей поместится в одном дюйме. Один миллион пикселей называют мегапикселем. Но их значимость сильно переоценивают маркетологи. Большое разрешение вам понадобится только при распечатке больших изображений.
Для того чтобы распечатать фотографию 10х15 см, хватит 2 мегапикселя. Для наглядности возьмите любое изображение с большим разрешением. В графическом редакторе уменьшите его на 50%. Сравните два изображения. Они выглядят совершенно одинаково. Вы заметите потерю детализации, только если увеличить масштаб.
Для примера использовался фотоаппарат Nikon D5100.
Отталкиваясь от вышесказанного, можно сделать вывод: физический размер матрицы и её свойства – и есть показатель качества. Для макросъемки важнее детализация изображения и количество пикселей. Для съемок в плохом освещении подойдет более светочувствительная матрица.
Для любительской съемки могут подойти качественные «цифровики» с маленькой матрицей. Снимайте тем, что у вас есть. Ведь для того чтобы получить хорошую фотографию, не нужна дорогая техника.
Какой бы большой ни была ваша матрица, она не обеспечит глубокий смысл снимка или завораживающий пейзаж.
Источник: https://sovetclub.ru/kakaya-matrica-dlya-fotoapparata-luchshe
Фото в нашей жизни
Размеры матриц цифровых фотоаппаратовВ технической характеристике цифрового фотоаппарата размер матрицы может указываться в нескольких единицах измерений: в мегапикселях или пикселях, в частях дюйма, а также физический размер матрицы в миллиметрах (длина и ширина).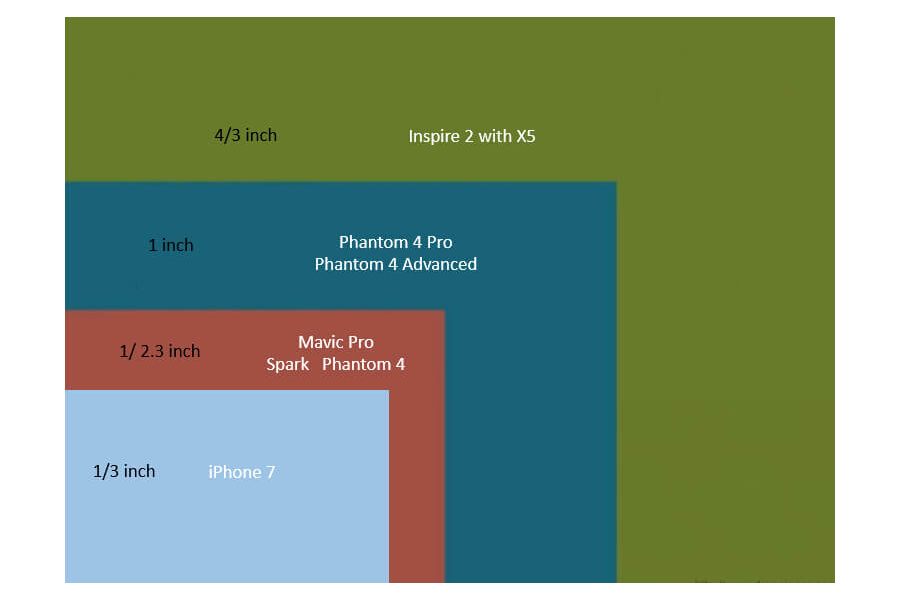
Размер матрицы цифрового фотоаппарата в мегапикселях или пикселях несет наименее объективную информацию о качестве матрицы. В этом случае мы знаем количество пикселей. Но, не зная физического размера фотодиода, трудно судить о качестве матрицы.
Размер диагонали матрицы цифрового фотоаппарата более достоверно, но не очень наглядно. Сравнивая диагонали, мы можем только судить, какая матрица больше. Но важную роль играет отношение сторон матрицы. А этой информации мы в данном случае не получим.
Размер матрицы цифрового фотоаппарата, выраженный в миллиметрах несет наиболее достоверную и полную информацию.
Нужно сказать, что все матрицы сравниваются с размером кадра 35мм фотопленки для пленочного фотоаппарата.
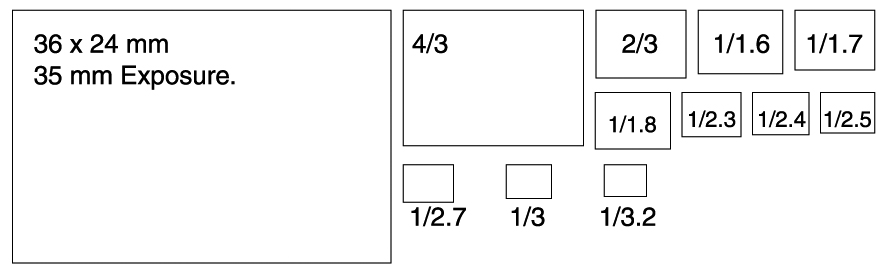
Размер кадра фотопленки составляет 36 * 24 мм. Этот размер на сегодняшний день является стандартом. Соответственно, чем ближе размеры матриц цифровых фотоаппаратов приближается к размеру кадра пленочного фотоаппарата, тем лучше матрица.
Ниже приводится таблица наиболее «ходовых» размеров матриц фотоаппаратов.
Таблица размеров матриц цифровых фотоаппаратов
| Диагональ вдюймах | Размер матрицы в мм | Кроп – фактор |
| 1/3.2″ | 4,5 * 3,4 | 7.9 |
| 1/2.7″ | 5,3 * 3,96 | 6.7 |
| 1/2.0″ | 6,4 * 4,8 | 5.6 |
| 1/1.8″ | 7,2 * 5,3 | 4.8 |
| 2/ 3″ | 8,8 * 6,6 | 4.0 |
| 1/1″ | 12,8 * 9,6 | 2.7 |
| 4/3″ | 18,1 * 13,3 | 2.0 |
| APS-C | 22,7 * 13,825,1 * 16,7 | 1.4 – 1.74 |
| Кадр 35мм пленки | 36 * 24 | 1 |
Из талицы размеров матриц цифровых фотоаппаратов видно, что ближе всех к полноразмерной матрице подходит матрица формата APS-C.
Матрицы формата APS-C применяются в основном на зеркальных фотоаппаратах.
В последней графе таблицы размеров матриц цифровых фотоаппаратов указан Кроп-фактор. Это коэффициент, характеризующий отношение линейных размеров кадра 35мм фотопленки к соответствующим размерам матрицы цифрового фотоаппарата. И чем он меньше, тем ближе к фотоаппарату с полноразмерной матрице.
Для добавления комментариев вам необходимо зарегистрироваться на сайте.
Источник: http://foto-kan.ru/matritsa-fotoapparata/razmery-matrits-tsifrovykh-fotoapparatov.html
Какая матрица для фотоаппарата лучше: как выбрать
Покупая фотоаппарат, неважно какой: профессионального класса или рядовой бюджетный компакт для съемок друзей и семьи на природе, хочется, чтобы снимки получались качественными, а сам аппарат давал как можно больше свободы.
Зная, какая матрица для фотоаппарата лучше, можно не впадать в ступор в магазине при виде двух моделей разных марок, которые выглядят одинаково, но стоят очень по-разному.
Все дело в сенсоре, который и отвечает за то, какое изображение будет получаться и насколько гибкие рамки пользования фотоаппаратом будут у владельца.
Совет
Матрицы цифровых фотоаппаратов делятся на два основных типа по применяемым полупроводникам и технологии считывания информации.
- Тип матрицы ПЗС (CCD) — самый распространенный. Это достаточно дешевая технология, информация об изображении считывается последовательно с каждой ячейки.
- КМОП матрицы CMOS дороже, но эффективнее в плане скорости работы, поскольку позволяют считывать данные сразу со всех светочувствительных элементов. Такие сенсоры устанавливаются в дорогих камерах, поскольку ни один производитель не пройдет мимо шанса предоставить пользователю возможности съемки с очень малыми выдержками, что в свою очередь усложняет аппаратно-программный комплекс.
Большинство фотоаппаратов пользовательского класса оснащено ПЗС матрицами.
При этом ставится вполне ожидаемое условие: для получения действительно качественных снимков при естественном освещении (или при недостаточном) лучше использовать штатив, поскольку время выдержки будет значительным. Аналогично — не получится делать снимки крайне быстро, поскольку нужно время на получение и обработку изображения.
Некоторые производители решают последнюю проблему достаточно просто: оснащают фотоаппараты буфером памяти. Туда помещаются кадры до обработки, когда ведется съемка в так называемом спортивном режиме — серией за короткий промежуток времени.
Дорогие фотокамеры, оснащенные КМОП матрицами, позволяют делать снимки «с рук» с малой выдержкой, имеют высокую светочувствительность и низкий уровень шума. С помощью такого оборудования можно проводить экспонометрию, снижается время автофокусировки, естественно, легко сделать хороший кадр.
Еще одна технология, которая применяется в самой дорогой фототехнике — многослойные матрицы. Это не очередной пункт в списке «виды матриц». Светочувствительная зона таких аппаратов состоит из трех слоев ПЗС, каждый из которых считывает только один цвет. В результате качество изображения просто потрясает. Техника с данной технологией особо маркируется: 3CCD.
Последнее, что стоит упомянуть, – технологические размеры матриц. ПЗС сенсоры можно сделать маленькими, они построены на кремниевых элементах. А КМОП матрицы достаточно большие, что является еще одним рациональным доводом в пользу их применения в дорогой профессиональной технике.
Количественный показатель качества
Задавая себе вопрос, какая матрица фотоаппарата лучше,- можно достаточно быстро получить ответ без необходимости вникать в технологические особенности. Обратите внимание на следующие характеристики:
- заявленное количество мегапикселей в характеристике камеры;
- эффективное количество пикселей, которое ответственные производители указывают в документации к фотоаппарату;
- возможные размеры изображений, которые можно делать с помощью камеры.
Производители дешевых моделей фотоаппаратов часто лукавят, указывая, прежде всего, размерность картинки и выставляя огромные цифры как эффективный рекламный ход.
Это не говорит о качестве получаемых снимков. Типы матриц фотоаппаратов могут быть разного класса.
Однако если сенсор не имеет достаточной разрешающей способности, большие изображения на выходе будут иметь низкую детализацию и высокий уровень шума.
Еще больше о качестве камеры скажет соотношение между заявленными мегапикселями матрицы и количеством эффективных точек. Это напрямую говорит о применяемой оптике. Если аппаратная часть выполнена ответственно, заявленное и эффективное количество пикселей будет почти одинаково, что не только положительно характеризует продажную цену, но и напрямую отвечает за качество снимков.
Светочувствительность и шумы
Светочувствительность матрицы — еще одна характеристика, которая описывает фотоаппарат. Покупать камеру стоит, ориентируясь на планируемые возможности применения.
Сегодня в документации в графе светочувствительности можно встретить очень высокие цифры — до 51000 и больше. Однако это не говорит напрямую о возможности делать качественные снимки.
Нет и рекомендаций, какой должна быть светочувствительность. Работает все следующим образом:
- для получения хорошего изображения требуется обеспечить выдержку, время которой зависит от уровня освещенности и светочувствительности матрицы;
- при среднем и низком освещении приходится применять штатив;
- если хочется продолжать снимать «с рук», можно программно поменять уровень светочувствительности матрицы в настройках фотоаппарата.
Однако высокая светочувствительность при малой установленной выдержке — это прямой путь к появлению шумов на снимке. Повышенная зернистость, появление мозаики — это те черты, которые раздражают и требуют тщательной вторичной обработки изображения.
Уровень светочувствительности является определяющим только при четком осознании того, в каких именно условиях будет использоваться камера. К примеру, при работе со штативом можно покупать фотоаппарат с высоким показателем, это даст широкие возможности съемки при самых разных освещениях без применения вспышки.
Физическая геометрия сенсора
Физический размер матрицы фотоаппарата в миллиметрах — еще один фактор, который не только напрямую отвечает за качество снимков, но и очень сильно формирует цену камеры.
У самых лучших моделей соотношение размерности, которое основано на стандартном формате пленки 35 мм, близко к единице.
Обратите внимание
Чем дешевле модель, тем выше показатель «кроп», обрезки, который сигнализирует о том, что матрица меньше по габаритам.
Чем меньше площадь сенсора, тем ниже охват визуального пространства перед объективом и:
- ниже общее количество света, которое падает на матрицу, следовательно, приходится повышать светочувствительность и увеличивать цифровой шум;
- больше теряется малых деталей, появляется размытие, это вызывают малые размеры, до которых преобразуется кадр.
Высокие значения кропа в фотоаппарате также означают, что разница в освещенности объектов в поле зрения фотоаппарата будет сглаживаться, что очень негативно сказывается на снимках, полученных в вечернее время без вспышки, например.
Коэффициент размерности указывается в документации к камере. Неважно, ориентируетесь ли на бюджетную или профессиональную модель — лучше будет купить аппарат с большой в геометрическом смысле матрицей.
Заключение
Невозможно сказать, какая матрица лучше. Выбирать фотоаппарат следует исходя из режимов, в которых он будет использоваться. Невозможно провести и всесторонне сравнение матриц фотоаппаратов – каждая проиграет в каком-то случае.
Правильно предсказанные условия съемок позволят камерам даже с относительно посредственными матрицами делать очень хорошие снимки. Главный фактор, который нужно учитывать обязательно — геометрические размеры матрицы. Тем, кто хочет получать действительно большие изображения в пикселях, также нужно обратить внимание на количество эффективных мегапикселей фотоаппарата.
Источник: https://TehnoPanorama.ru/fotoapparaty/matritsa-fotoapparata-kakaya-luchshe.html
Матрица фотоаппарата – какая лучше?
Каждый, кто планирует заниматься фотосъемкой, ответственно подходит к выбору самого устройства. И это правильно. В первую очередь каждый любитель и профессионал обращает внимание на качество матрица.
Ее размер — это очень важный параметр, но сперва стоит познакомиться с самим устройством, что представляет из себя матрица фотоаппарат.
Какая лучше? — с этим мы и разберемся в этой статье, а для этого нужно удариться в изучение всех ее характеристик.
к содержанию ↑
Матрица. Что она из себя представляет?
Матрица — это поверхность, на которую попадает свет и создает электрические импульсы. Это явление обрабатывается процессором, после чего информация записывается в виде цифровых значений. Другими словами, фотодатчик оцифровывает лучи света, которые в дальнейшем мы можем пронаблюдать в виде сделанной фотографии.
к содержанию ↑
Разрешение
Фотодатчик представляет из себя множество датчиков пикселей. Количество этих пикселей характеризует разрешение оцифрованного изображения. Детализация обусловлена числом этих пикселей. Теперь вы понимаете, от чего именно зависит четкость изображения. Для DSLR-камер это количество называется мегапикселями.
Современные технологии имеют до 30 миллионов пикселей. Размер матрицы обратно пропорционально влияет на глубину резкоти фотоснимка. Также этот параметр влияет и на размеры пикселя, только уже прямо пропорционально. Не трудно сделать вывод, что от размеров зависит и светочувствительность, и цветопередача.
Размер матрицы фотоаппарата, какой лучше выбрать? Давайте сперва разберемся с его предназначением.
к содержанию ↑
Физический размер матрицы
Именно этот параметр играет одну из самых главных ролей в работе фотоаппарата. Очевидно, что речь идет про геометрические размеры. Ширина и длина сенсорного датчика измеряется в миллиметрах, а в некоторых камерах может быть переведена в дюймы.
От этого размера зависит и цифровой шум, который возникает при переносе основного сигнала на передатчик фотокамеры. От площади зависит и то, сколько света попадет на сенсор.
В последнее время принято брать во внимание и коэффициент “crop factor”, который показывает отношение сенсора и полного кадра.
Светочувствительность
Светочувствительностью называется свойство пленок или матриц, которые выполнены из материала, чувствительного к свету. Этот параметр характеризует скорость “впитывания” света. По стандартам этот параметр принято обозначать как ISO.
Именно этот показатель указывает на способность усиления сигнала. Все это означает, что высокое значение ISO приведет к большему усилению сигнала, но не получится избежать усиления шумов. Поэтому большие значения — это не всегда показатель качества.
Самое оптимальное значение ISO должно быть где-то 400 единиц.
Вот мы и перешли к самому главному вопросу: какой тип матрицы лучше для фотоаппарата?.
Типы матриц фотоаппаратов
Выделяют следующие типы матриц, которые зависят от вида используемого светофильтра:
- RGB — это самый дешевый тип, имеющий самое большое распространение в фото-технике.
- RGBW. Модели с таким типом обойдутся чуть дороже, но, как известно, за качество нужно платить. RGBW удобно использовать в слабоосвещенных местах.
- RGBE. В таких матрицах установлен фильтр Баера, что положительно сказывается на цветовой гамме фотоснимка. Цвета таких фотографий наиболее максимально приближены к естественным.
Также можно классифицировать датчики по двум разным типам сенсоров:
- CCD (ПЗС). Обеспечивает последовательное считывание с ячеек информации.
- CMOS (КМОП). Считывает данные отдельно по конкретному адресу нужной ячейки.
В чем же еще их различия?
- Матрицы ПЗС требовательны по времени к “созданию” фотографии. Такие устройства невыгодно использовать для быстрой съемки.
- Если вы заинтересованы в автоматической фокусировке или экспонометрии, то CMOS типа bsi — это самый лучший вариант для приобретения.
- CCD-матрица имеет неоспоримое преимущество над CMOS — это ее малые габариты. Поликремниевый светодиод позволяет достичь меньших размеров этого элемента, но он же пагубно влияет на качество снимков в тех помещениях, которые оборудованы слабым освещением.
- В структуре CMOS-матрицы использованы полупроводники из металлооксидных материалов, которые приводят к большему размеру, но позволяют получить лучшее качество фотоснимков.
к содержанию ↑
Что же в итоге лучше?
Объективного мнения на этот счет найти невозможно, поскольку каждая технология имеет неоспоримые достоинства и недостатки. Да и все, по большей степени, зависит от сферы их применения.
к содержанию ↑
Видеоматериал
Надеемся, что, опираясь на прочитанное, вы смогли определить, какой тип матрицы лучше для фотоаппарата для вас. Удачных кадров!
Источник: https://serviceyard.net/gadgets/matritsa-fotoapparata-kakaya-luchshe.html
Матрица фотоаппарата
Никого сейчас не удивишь цифровой фото камерой, каждая из которых наделена матрицей фотоаппарата. Что такое матрица фотоаппарата, почему ее название матрица цифрового фотоаппарата, какие ее функции.
Почти два столетия прошло с тех пор, как был создан первый прототип фотоаппарата. Принцип работы фотокамеры остался прежним: попадание светового потока через объектив и фиксация на светочувствительном элементе. Ранее использовались пленочные элементы с свойственной им химической реакцией. Новая эра фотоаппаратов преподнесла нам цифровые фотокамеры.
Матрица фотоаппарата, а точнее матрица цифрового фотоаппарата — это электронная схема, состоящая из миллионов крошечных светочувствительных диодов, которые реагируют на световой поток, попадающий на них. Один такой светодиод матрицы цифрового фотоаппарата приносит вашему изображению ровно один пиксель.
Теперь представьте себе матрицу фотоаппарата, передающую 12 миллионов пикселей. Сложно? Вовсе нет: 12 мегапикселей — это площадь матрицы в пикселях. К примеру, если соотношение сторон матрицы 3:4, то на матрице цифрового фотоаппарата будет располагаться 3 тысячи пикселей в столбце и таких столбцов 4 тысячи.
Как выглядит матрица фотоаппарата. Какой физический размер матрицы фотоаппарата?
Особенность электроники матрицы цифрового фотоаппарата заключается в накоплении эклектического заряда в зависимости от количества попадающего света на матрицу фотоаппарата.
Если происходит переизбыток энергии на пикселе или группе пикселей матрицы цифрового фотоаппарата, то эта энергия начинает переходить на соседние пиксели.
В результате, когда фотографируете солнце вы получаете световой пучок разной окружности.
Важно
Важно знать: чем качественнее и дороже матрица, а главное, чем больше физический размер матрицы цифрового фотоаппарата, тем больше расстояние между её пикселями, тем менее заметен эффект распределения энергии на соседние пиксели.
Количество пикселей на матрице должно увеличиваться с увеличением качества иили размера матрицы цифрового фотоаппарата. Иначе, новые пиксели теряют свою эффективность. Размер матрицы цифрового фотоаппарата — важная характеристика!
Для начала, что это такое. Раньше, в эпоху пленочных фотоаппаратов с этим было просто — вместо матрицы была светочувствительная пленка-негатив. Стандарт был 35мм (физический размер 24×36 мм).
В современном же цифровом фотоаппарате вместо пленки устанавливается светочувствительная матрица – интегральная микросхема, состоящая из светочувствительных элементов (фотодиодов). Матрица предназначена для преобразования спроецированного на нее оптического изображения в поток цифровых данных.
Фотоматрица оцифровывает («нарезает» на пиксели) то изображение, которое формируется объективом фотоаппарата.
Существуют несколько типов матриц, применяемых в цифровых камерах, основные из которых CCD и CMOS. CCD-матрица обеспечивает лучшие показатели при съемке динамичных и мелких объектов, у нее низкий уровень шума и высокий коэффициент заполнения. CMOS-матрица же используется в изделиях, для которых критична конечная стоимость, благодаря своей недорогой стоимости, низкого энергопотребления.
Итак, физический размер матрицы. Необходимо отметить, что физический размер матрицы — одна из важнейших характеристик фотоаппарата, влияющих на качество получаемых фотографий. Физический размер — это ее геометрический размер (длина и ширина в миллиметрах).
Однако чаще всего размеры фотосенсоров чаще всего обозначают в виде дробных частей дюйма, например 1 / 2.5″. Так как эта величина обратная, то и соответственно, размер матрицы больше, если число после дроби меньше.
Для примера, приведем соотношение наиболее часто используемых матриц:
| Диагональ матрицы | Геометрический размер |
| 1 / 3.2″ | 3.4 х 4.5мм |
| 1 / 2.7″ | 4.0 х 5.4мм |
| 1 / 2.5″ | 4.3 х 5.8мм |
| 1 / 2.3″ | 4.6 х 6.2мм |
| 1 / 1.8″ | 5.3 х 7.2мм |
| 2 / 3″ | 6.6×8.8мм |
| 1″ | 9.6 х 12.8мм |
| APS-C (матрица, в 1.6 раза меньше APS) | 15 х 23мм |
| полный формат (APS) | 24 х 36мм |
Проще ориентироваться не на размер матрицы в обратных значениях дюйма, а на кроп-фактор. Кроп-фактор — это коэффициент, показывающий во сколько раз матрица фотоаппарата меньше полного формата. Например, для наиболее распространенного размера матрицы современных мыльниц 1 / 2.3″ кроп-фактор составит 5.62, т.е. матрица в 5.62 раза меньше полноформатной.
Размер матрицы влияет на количество цифрового шума, передаваемого вместе с основным сигналом на матрицу. Наличие цифрового шума, в свою очередь, придает фотографии неестественный вид и создается впечатление, что на фотографии наложена матовая пленка.
Чем больше физический размер матрицы, тем больше ее площадь и тем больше света на нее попадает, в результате чего полезный сигнал матрицы будет сильнее и соотношение сигнал / шум будет лучше.
Это позволяет получать более яркую, качественную картинку с естественными цветами.
Источник: http://nikon3100.ru/statii/matrica-fotoapparata
размер матрицы фотоаппарата | Мир сквозь призму
Многие уже в курсе того, что нужно знать, выбирая цифровой фотоаппарат.
Сегодня поговорим о таком важном элементе, как матрица фотоаппарата и ее разрешении.
1. Мегапиксели
Реклама пестрит: мегапиксели! Почему-то убеждая покупателя, что чем больше этих самых мегапикселей, тем лучше снимает камера.
Наверное, стоит пояснить, что такое пиксель. Пиксель – это элемент изображения, который состоит из 5ти частей, несущих информацию: яркость красного, яркость зеленого и яркость синих цветов, а также координаты по вертикали и горизонтали.
Эти данные позволяют процессору камеры правильно определять положение точек на матрице и их цвета. Все вместе пиксели образую кадр. В Мегапикселях (миллион пикселей) измеряют размер фотографии или отсканированного снимка.
2. Размер матрицы фотоаппарата
Однако матрица камеры, на которую записывается информация, имеет определенные размеры. За стандарт матрицы цифрового фотоаппарата принят размер пленочного кадра 24х35мм. В зависимости от типа камеры матрицы могут быть меньше или равны этому формату.
Ниже вы можете увидеть соотношение физических размеров матрицы некоторых моделей цифровых фотоаппаратов к стандартному размеру пленки в 35 мм. У компактов размер матрицы принято указывать в виде формулы 1/х ” (где «х» может быть целым или дробным числом, например 1/1,7, 1/2,5 и т. п.), а у зеркальных камер указываются физические размеры матрицы в мм (например, 22,2×14,8 мм или 24х36 мм).
Компактные камеры:
- Матрица размером 1 / 3.2″ – самые маленькие матрицы, соотношение сторон 4:3, физический размер 3.4 х 4.5 кв.мм;
- Матрица размером 1 / 2.7″ , соотношение сторон 4:3, физический размер 4.0 х 5.4 кв.мм;
Хорошие компактные камеры и псевдозеркалки
- Матрица размером 1 / 2,5″, соотношение сторон 4:3, то есть 4,3 х 5,8 кв.мм;
- Матрица размером 1 / 1,8″ , соотношение сторон 4:3, геометрический размер 5,3 х 7,2 кв.мм;
Дорогие компактные камеры и компактных камерах со сменной оптикой
- Матрица размером 2 / 3″ , соотношение сторон 4:3, физический размер 6,6 х 8,8 кв.мм ;
- Матрица размером 4 / 3″ , физический размер 18 х 13,5 кв.мм, соотношение сторон 4:3;
Бюджетные и полупрофессиональные зеркальные камеры
- DX, APS-C формат, соотношение сторон 3:2, размер около 24 х 18 кв.мм. Матрицы таких размеров соответствуют “полукадру” 35 мм кадра.
3. Как это все совмещается
Чем больше размер матрицы фотоаппарата, тем комфортнее чувствуют себя светочувствительные элементы – пиксели: расстояние между ними больше, перегреваются они меньше и, следовательно, лучше восприимчивость матрицы к свету. И тем качественнее получится снимок. Даже при одинаковом количестве пикселей качество фотографий с разных фотокамер может оказаться разным.
Что бы ни кричала реклама, число мегапикселей определяет лишь максимальный размер отпечатка, который можно получить с фотографии. И совсем уж мегапиксели не связаны с качеством изображения в отличие от размера матрицы цифровых фотоаппаратов. Ведь по факту даже разрешения 2 Мп достаточно, чтобы напечатать изображение хорошего качество размером 10*15. А 4Мп подойдут прекрасно для фотографии формата А4.
Поэтому гораздо более важно не количество пикселей, а их размер. Ведь если на маленькую матрицу запихнуть, скажем, 8Мп, то они будут очень маленькими. А чем меньше размер пикселя, тем выше уровень шума изображения. В компактных камерах и большинстве зеркалок нежелательные эффекты сглаживает встроенная программа шумоподавления, но эффект от нее — замыленность снимка.
Большое количество компактных любительских камер имеет разрешение матрицы фотоаппарата от 5 до 12 Мп, у зеркалки же этот диапазон составляет от 8 до 21 МП, при этом размер матрицы гораздо больше. В настройках камеры всегда можно выбрать разрешение снимка. Советую устанавливать этот параметр, ориентируясь на золотую середину, – такого разрешения вполне достаточно, чтобы получить четкую и красочную картинку.
Чтобы лучше объяснить соотношение количества пикселей и размера матрицы, приведу простой пример. Допустим, нужно посадить на грядке кусты клубники. Чем больше грядка, тем больше кустов можно посадить. Но если попытаться втиснуть на кусок земли 20 кв.м. 5 кустов, то в итоге вырастет сорняк.
Так и с пикселями: количество пикселей может быть одинаковым, но у «взрослой» камеры они будут на большей площади и смогут собрать больше света. А больше света — это, как правило, меньше шума и более широкий динамический диапазон.
Надеюсь, я все доступно объяснила. Удачи вам в выборе фотокамеры!
типы, размер, разрешение, светочувствительность, чистка
Ни один фотоаппарат не может обойтись без матрицы. Современные модели оснащаются ей практически поголовно. Так произошло в момент, когда цифровые аналоги начали вытеснять устаревшие пленочные технологии. Матрица фотоаппарата является одним из основных компонентов, без которых невозможна эксплуатация всего прибора в целом, ведь его роль если и не является ключевой, то, по крайней мере, может считаться одной из ведущих. Именно матрица отвечает за качество будущего снимка, цветопередачу, четкость, полноту кадра. Как и другие важные элементы фототехники, матрица обладает рядом основных параметров, на которые обычно принято ориентироваться при выборе той или иной модели.
Типы матриц
Матрица цифрового фотоаппарата – это, в первую очередь, микросхема. Она преобразует световые лучи, которые, преломившись в системе линз и зеркал, попадают на нее. В результате такого преображения получается электрический сигнал, который выводится в цифровом виде, образуя снимок. За весь этот процесс отвечают специальные фотодатчики, расположенные на самой плате. Чем больше количество датчиков, чувствительных к свету, тем больше разрешение, и, как следствие, качество конечного снимка.
Встречаются матрицы следующих типов.
- ПЗС – тип матрицы фотоаппарата, который дословно расшифровывается как прибор зарядовой связи. В английском варианте – Charge-Coupled Device. Весьма известная аббревиатура, которая, впрочем, не так часто встречается в наши дни. Многие используют приборы, в основе которых лежат светодиоды, имеющие высокую светочувствительность, созданные на основе ПЗС системы, но, несмотря на широкую распространенность, данный вид микросхем все больше вытесняется более современным.
- КМОП-матрица. Формат матрицы, введенный в эксплуатацию в 2008 году. Впрочем, история создания данного формата уходит корнями в далекий 93-й, когда впервые была опробована технология APS. КМОП-матрица – это комплиментарный металл-оксид-полупроводник. Данная технология позволяет производить выборку отдельного пикселя почти так же, как и в стандартной системе памяти, к тому же, каждый пиксель оснащается дополнительным усилителем. Поскольку данная система является более современной, она зачастую оснащается автоматической подстройкой времени экспонирования каждого пикселя по отдельности. Данное улучшение позволяет получить полный кадр без потери боковых границ, а так же без потери верха и низа кадра. Полноразмерная матрица чаще всего бывает выполнена по технологии КМОП.
- Существует еще один тип матрицы – Live-MOS-матрица. Ее выпустила фирма «Панасоник». Данная микросхема функционирует при помощи технологии, в основе которых лежит МОП. МОП-матрица позволяет делать качественные профессиональные снимки без высокого уровня шума, а также исключает перегрев.
Физический размер матрицы
Размер матрицы фотоаппарата – одна из ее важнейших характеристик. Как правило, его указывают в дюймах в виде дроби. Больший размер подразумевает меньшее количество шумов на конечном снимке. К тому же, чем больше физический размер, тем больше световых лучей способна зарегистрировать матрица. Объем и количество лучей напрямую влияют на качество передачи оттенков и полутонов.
Кроп-фактор — это соотношение размеров кадра пленочного фотоаппарата 35 мм к размерам матрицы цифрового фотоаппарата. Все дело в том, что процесс создания цифровой матрицы довольно дорогостоящий, и поэтому производители постарались максимально сократить ее размер.
Если сравнить фото, сделанное с одним объективом на фотоаппарате с полнокадровой матрицей и фотоаппарате с «кропнутой» матрицей, то в первом случае угол охвата будет больше, и само изображение шире. Получается, что кропнутая матрица обрезает готовую картинку, отсюда и пошло такое название – кроп от англ. crop (резать).
Чаще всего кроп-фактор используют для замера наиболее точного расстояния фокуса у объектива, устанавливая его на различные приборы. Здесь вступает в игру такое понятие, как эквивалентное фокусное расстояние (ЭФР), которое вычисляется путем умножения фокусного расстояния (ФР) на кроп-фактор. Так, объектив с полнокадровой матрицей (кроп=1) и объективом с ФР 50 мм зафиксирует такое же по размерам изображение, как и кропнутая матрица 1,6 с объективом с ФР 30 мм. В этом случае можно сказать, что ЭФР у этих объективов одинаковое. Ниже приведена таблица, в которой можно провести сравнение, как меняется ЭФР в зависимости от кроп-фактора.
Количество мегапикселей и разрешение матрицы
Матрица сама по себе является дискретной. Она состоит более чем из миллиона элементов, которые и преобразовывают световой поток, идущий от линз. В характеристике каждой модели фотоаппарата можно отыскать такой параметр матричной платы как количество светочувствительных элементов или разрешение матрицы, измеряемое в мегапикселях.
Один мегапиксель равен одному миллиону светочувствительных датчиков, улавливающих преломленные в линзах лучи. Разумеется, чем этот параметр будет больше, тем лучший снимок получится сделать.
Правда, здесь есть и обратная зависимость. Если физический размер матрицы меньше, то и количество мегапикселей должно быть пропорционально меньше, в противном случае не удастся избежать эффекта дифракции: фотографии будут замыленными, без четкости.
Чем больше размер пикселя, тем больше он способен зафиксировать лучей, падающих на него. Размер пикселей напрямую связан с размерами матрицы, и влияет, в основном, на широту кадра. Чем больше количество мегапикселей с правильным соотношением размеров матрицы, тем больше лучей света смогу уловить датчики. Количество зафиксированных лучей напрямую влияет на исходные параметры преобразуемого материала: резкость, цветность, объем, контрастность, фокус.
Таким образом, разрешение фотокамеры влияет на качество снимка. Зависимость разрешения от объема использующихся пикселей очевидна. В объективе при помощи сложной расстановки оптических элементов формируется необходимый световой поток, который потом матрица поделит на пиксели. Оптические приборы тоже обладают собственным разрешением. Более того, если разрешение объектива достаточно мало, а передача двух светящихся точек, разделяемых одной темной, происходит как единого целого, то разрешение будет не столь отчетливо выделяться. Происходит это именно из-за прямой зависимости и привязки к числу мегапикселей.
Важно: на качественный снимок влияет как параметр разрешения матрицы, так и разрешение оптики объектива. Измеряется оно количество линий на 1 мм. Своего максимального значения разрешение достигает, когда оба показателя — и матрица, и объектив — соответствуют друг другу.
Если говорить о разрешении современных цифровых микросхем, то оно складывается из размера пикселя (от 2 до 8 мкм). На сегодняшний день на рынке представлены модели с показателями до 30 мп.
Светочувствительность
В фотоаппаратах по отношению к матрице принято использовать термин эквивалентной чувствительности. Связано это с тем, что подлинную чувствительность можно измерять различными способами в зависимости от множества параметров матрицы. Зато, применив усиление сигнала и цифровую обработку, пользователь может обнаружить высокие пределы чувствительности.
Параметры светочувствительности демонстрируют возможность исходного материала преобразовываться из электромагнитных воздействий потока света в электрический двоичный сигнал. Проще говоря, показывать, сколько требуется света для получения объективного уровня электрического импульса на выходе.
Параметр чувствительности (ISO) чаще всего используется фотографами для демонстрации возможности съемки в условиях плохого освещения. Увеличение чувствительности в параметрах прибора позволяет улучшить качество конечного снимка при необходимом значении диафрагмы и выдержки. ISO может достигать значения от нескольких десятков до тысяч и десятков тысяч единиц. Негативной стороной высоких значений светочувствительности является появление «шумов», которые проявляются в виде эффекта зернистости кадра.
Как проводить чистку матрицы в домашних условиях
Битые пиксели не всегда могут быть таковыми на самом деле. В действительности, когда происходит смена объектива, на матрицу могут попасть частицы мусора, вызывающие эффект «битого пикселя». Чистка матрицы фотоаппарата нужна для профилактики этого эффекта, а также для более комфортной работы с прибором.
Со временем, в особенности, если устройство эксплуатируется подолгу в различных погодных условиях, матрица может покрыться слоем пыли. При нарушении герметичности в области крепления объектива на поверхность может попасть небольшое количество влаги, что тоже может негативно сказаться на качестве кадра. Чистку можно доверить профессионалам из сервисного центра, а можно провести и самостоятельно, в домашних условиях.
Важно не забывать, что помещение, в котором будет происходить процедура, должно быть как можно менее пыльным, без сильных сквозняков. Прежде чем приступать к самой процедуре, необходимо убедиться, что аккумуляторная батарея заряжена.
Первый и самый простой способ очистки стеклянной поверхности кремниевой пластины микросхемы – сдувание пыли. Для этого следует использовать самую обычную грушу для чистки объективов, она продается в любом крупном магазине бытовой техники. К сожалению, использование груши помогает только при снятии легкого налета небольших песчинок пыли. Для более крупных частиц, которые могли прилипнуть к поверхности, может потребоваться что-то более основательное.
Если груша не помогла справиться с пятнами на матрице, можно попробовать использовать специальный набор для очистки стеклянной поверхности. Стоит он несколько дороже, но эффективность очистки значительно выше.
- Первый пункт в очистке – использование специального пылесоса. Его сборка не занимает много времени и детально описана в инструкции к набору. На конце устройства находится мягкий наконечник, так что повреждение прибора во время работы исключено. Лучше всего будет прочистить при помощи пылесоса не только стеклянную поверхность, но и все скрытые полости, доступные для чистки.
- После уборки при помощи пылесоса можно начинать влажную уборку. Она осуществляется при помощи специальных щеточек, одна из которых влажная, другая сухая. Этот вид уборки нужен для пылинок, которые, будучи мокрыми, попали на поверхность стекла, и, высохнув, прикрепились к нему, создав эффект «битого пикселя». Влажная щетка пропитана специальным раствором, который эффективно удаляет засохшие песчинки и пылинки, не оставляя пятен и разводов. Необходимо проводить по стеклу плавными аккуратными движениями, лишь слегка нажимая на саму щетку. Оставшаяся влага довольно быстро испарится сама. Даже если после влажной уборки на стекле остается пара капель, то они прекрасно удаляются сухой щеточкой (кисточкой).
- Третий этап – финальный, проводим сухой щеточкой по матрице и убеждаемся, что она чистая.
После очистки можно попробовать сделать тестовый снимок, чтобы убедиться, что процедура прошла успешно. Для этого необходимо закрыть диафрагму до максимального значения и сделать снимок чистого белого листа, приведя объектив в состояние полной расфокусировки. Затем сравнить качество снимков до и после.
Почистить матрицу зеркального фотоаппарата довольно просто, для этого не требуется каких-то глубоких знаний или большого опыта, достаточно желания, немного терпения и знания базовых принципов очистки высокоточной оптической техники.
Заключение
Матрица фотоаппарата является важнейшей деталью любой современной зеркалки. Без нее невозможно сделать снимок, а от ее параметров зависит дальнейшее использование устройства. Если параметры матрицы выбраны неправильно, фотоаппарат не будет оптимально справляться со своими задачами. Матрица не требует какого-то дополнительного ухода, кроме периодической чистки стеклянной поверхности.
Следует отметить, что светочувствительные датчики очень хрупкие и плохо переживают падение прибора даже с небольшой высоты, поэтому эксплуатировать фотоаппарат рекомендуется с максимальной осторожностью и аккуратностью.
Что такое матрица в фотоаппарате и её основные параметры
Матрица фотокамеры служит для преобразования попадающего на нее с объектива светового потока в электрические сигналы, которые затем камера и преобразует в снимок. Делается это при помощи фотодатчиков, расположенных на матрице в большом количестве.
Что такое матрица фотоаппарата — это микросхема, состоящая из фотодатчиков, которые реагируют на свет.
Структура самой матрицы является дискретной, то есть состоящей из миллионов элементов (фотоэлементов), преобразующих свет.
Поэтому в характеристиках фотоаппарата как раз и указывается количество элементов матрицы, которое мы знаем как мегапиксели (Мп). 1 Мп = 1 миллиону элементов.
Именно от самой матрицы и зависит количество мегапикселей фотоаппарата, которое может принимать значение от 0.3 (для дешевых телефонных фотоаппаратов) до 10 и больше мегапикселей у современных фотоаппаратов. Например, 0,3 Мп это в переводе уже 300 тысяч фотоэлементов на поверхности матрицы.
Характеристиками матрицы можно считать такие параметры:- Физический размер
- Разрешение (мегапиксели)
- Светочувствительность
- Отношение сигнал-шум
Внешний вид матрицы
Сама матрица фотоаппарата формирует черно белое изображение, поэтому для получения цветного изображения, элементы матрицы могут покрывать светофильтрами (красный, зеленый, синий). И если сохранять фотографию в формате JPEG и TIFF, то цвета пикселей фотоаппарат вычисляет сам, а при использовании формата RAW пиксели будут окрашены в один из трех цветов, что позволит обработать такой снимок на компьютере без потери качества.
Физический размер
Еще одной характеристикой матрицы является размер. Обычно размер указывается как дробь в дюймах. Чем больше размер, тем меньше шума будет на фотографии и больше света регистрируется, а значит, больше оттенков получится.
Размер матрицы очень важный параметр всего фотоаппарата.
Разные размеры матрицы
Чувствительность и шумы
В фототехнике применительно к матрицам используется термин «эквивалентная» чувствительность. Происходит это потому, что настоящую чувствительность измеряют различными способами в зависимости от назначения матрицы, а применяя усиление сигнала и цифровую обработку, можно сильно изменить чувствительность в больших пределах.
Светочувствительность любого фотоматериала показывает способность этого материала преобразовывать электромагнитное воздействие света в электрический сигнал. То есть, сколько нужно света, что бы получить нормальный уровень электрического сигнала на выходе.
Чувствительность матрицы (ISO) влияет на съемки в темных местах. Чем больше чувствительность можно выставить в настройках, тем лучше будет качество снимков в темноте при нужных диафрагме и выдержке. Значение ISO может быть от нескольких десятков до нескольких десятков тысяч. Недостатком большой светочувствительности может быть проявление шума на фотографии в виде зернистости. Так же чувствительность участвует в настройке экспозиции.
Размер и количество пикселей
Размер матрицы и ее разрядность в мегапикселях связаны между собой такой зависимостью: чем меньше размер, тем должно быть и меньше мегапикселей. Иначе из-за близкого размещения фотоэлементов возникает эффект дифракции и может получиться эффект замыливания на фотографиях, то есть пропадет четкость на снимке.
Еще размер матрицы и ее разрешение определяют размер пикселя и соответственно динамический диапазон, который показывает возможность фотокамеры отличить самые темные оттенки от самых светлых и передать их на снимке.
Так же чем больше размер пикселя, тем больше отношение сигнал-шум ведь больший по размерам пиксель может собрать больше света и увеличивается уровень сигнала. Поэтому при одинаковом размере матрицы меньшее количество мегапикселей может быть даже полезнее для качества фотографии.
Чем больше физический размер пикселя (англ. pixel — picture element), тем больше он сможет собрать падающего на него света и тем больше будет соотношение сигнал-шум при заданной чувствительности. Можно и по-другому сказать: при заданном соотношении сигнал-шум будет выше чувствительность. Это означает, что можно увеличивать значение чувствительности при настройке экспозиции без боязни получить шумы на фотографии. Разумеется шумы появятся, только значение ISO, при котором это произойдет, будет разным для разных фотокамер. Поэтому зеркалки со своими большими матрицами по этим показателям сильно опережают компакты.
Размер пикселя зависит от физического размера матрицы и её разрешения. Размер пикселя влияет на фотографическую широту. Дополнительно о количестве мегапикселей.
Матрица на плате
Разрешение
Разрешение матрицы зависит от количества используемых пикселей для формирования изображения. Объектив формирует поток света, а матрица разделяет его на пиксели. Но оптика объектива также имеет свое разрешение. И если разрешение объектива не достаточное, и он передает две светящиеся точки с разделением черной точкой как одну светящуюся, то точного разрешения фотоаппарата, которое зависит от значения Мп, можно и не заметить.
Поэтому результирующее разрешение фотокамеры зависит и от разрешения матрицы и от разрешения объектива, измеряемое в количестве линий на миллиметр.И максимальным это разрешение будет, когда разрешение объектива соответствует разрешению матрицы. Разрешение цифровых матриц зависит от размера пикселя, который может быть от 0,002 мм до 0,008 мм (2-8 мкм). Сегодня количество мегапикселей на фотосенсоре может дистигать значения 30 Мп.
Структура матрицы
Отношение сторон матрицы
В современных фотоаппаратах применяются матрицы с форматами 4:3, 3:2, 16:9. В любительских цифровых фотоаппаратах обычно используется формат 4:3. В зеркальных цифровых фотоаппаратах обычно применяют матрицы формата 3:2, если специально не оговорено применение формата 4:3. Формат 16:9 редко используется.
Тип матрицы
Раньше в основном использовались фотосенсоры на основе ПЗС (прибор зарядовой связи, по-английски CCD — Charge-Coupled Device). Эти матрицы состоят из светочувствительных светодиодов и используют технологию приборов с зарядовой связью (ПЗС). Успешно применяется и в наше время.
Но в 1993 году была реализована технология Activ Pixel Sensors. Её развитие привело к внедрению в 2008 году КМОП-матрицы (комплиментарный металл-оксид-полупроводник, по-английски CMOS — Complementary-symmetry/Metal-Oxide Semiconductor). При этой технологии возможна выборка отдельных пикселей, как в обычной памяти, а каждый пиксель снабжен усилителем. Так же матрицы на этой технологии могут иметь и автоматическую систему настройки времени экспонирования для каждого пикселя. Это позволяет увеличить фотографическую широту.
Фирма Panasonic создала свою матрицу Live-MOS-матрицу. Она работает на МОП технологии. Применяя такую матрицу можно получить живое изображение без перегрева и увеличения шумов.
Откуда берутся шумы на снимках и как их уменьшить.
Как можно почистить матрицу в зеркальном фотоаппарате.
Как размер матрицы влияет на качество снимков.
Рассекая матрицу камеры, Часть 3: Внутренняя матрица ←
13 августа 2013 г.
Сегодня мы изучим внутреннюю матрицу камеры в нашей третьей и последней главе трилогии «Рассечение матрицы камеры». В первой статье мы узнали, как разделить полную матрицу камеры на внутреннюю и внешнюю матрицы и как правильно обрабатывать неоднозначности, возникающие в этом процессе. Во второй статье внешняя матрица была рассмотрена более подробно, рассмотрены несколько различных интерпретаций ее трехмерных вращений и перемещений.Сегодня мы так же рассмотрим внутреннюю матрицу, исследуя две эквивалентные интерпретации: как описание геометрии виртуальной камеры и как последовательность простых 2D-преобразований. После этого вы увидите интерактивную демонстрацию, иллюстрирующую обе интерпретации.
Если вам не интересно углубляться в теорию и вы просто хотите использовать свою внутреннюю матрицу с OpenGL, ознакомьтесь со статьями «Калиброванные камеры в OpenGL без glFrustum», «Калиброванные камеры» и «gluPerspective».
Все эти статьи являются частью серии «Камера перспективы, интерактивный тур». Чтобы прочитать другие статьи этой серии, перейдите к оглавлению.
Внутренняя матрица преобразует координаты трехмерной камеры в двумерные координаты однородного изображения. Эта перспективная проекция моделируется идеальной камерой-обскурой, показанной ниже.
Внутренняя матрица параметризована Хартли и Зиссерманом как
\ [ K = \ left ( \ begin {array} {c c c} f_x & s & x_0 \\ 0 & f_y & y_0 \\ 0 & 0 & 1 \\ \ end {массив} \верно ) \]
Каждый внутренний параметр описывает геометрическое свойство камеры.Давайте подробно рассмотрим каждое из этих свойств.
Фокусное расстояние, \ (f_x \), \ (f_y \)
Фокусное расстояние — это расстояние между отверстием и пленкой (или плоскостью изображения). По причинам, которые мы обсудим позже, фокусное расстояние измеряется в пикселях. В настоящей камере-обскуре и \ (f_x \), и \ (f_y \) имеют одинаковое значение, которое показано как \ (f \) ниже.
На практике \ (f_x \) и \ (f_y \) могут различаться по ряду причин:
- Дефекты сенсора цифровой камеры.
- Изображение было неравномерно масштабировано при постобработке.
- Объектив камеры создает непреднамеренное искажение.
- В камере используется анаморфный формат, в котором объектив сжимает широкоэкранную сцену в матрицу стандартного размера.
- Ошибки калибровки камеры.
Во всех этих случаях результирующее изображение имеет неквадратные пиксели.
Наличие двух разных фокусных расстояний не очень интуитивно понятно, поэтому в некоторых текстах (например, Форсайт и Понсе) используется одно фокусное расстояние и «соотношение сторон», которое описывает величину отклонения от идеально квадратного пикселя.Такая параметризация хорошо отделяет геометрию камеры (то есть фокусное расстояние) от искажения (соотношения сторон).
Смещение главной точки, \ (x_0 \), \ (y_0 \)
«Главная ось» камеры — это линия, перпендикулярная плоскости изображения, которая проходит через точечное отверстие. Его пересечение с плоскостью изображения называется «главной точкой», как показано ниже.
«Смещение главной точки» — это положение главной точки относительно исходной точки пленки.Точное определение зависит от того, какое соглашение используется для определения местоположения происхождения; на иллюстрации ниже предполагается, что он находится в нижнем левом углу фильма.
Увеличение \ (x_0 \) смещает точечное отверстие вправо:
Это эквивалентно смещению пленки влево и оставлению точечного отверстия без изменений.
Обратите внимание, что рамка, окружающая камеру, не имеет значения, имеет значение только положение точечного отверстия относительно пленки.
Наклон оси, \ (s \)
Наклон оси вызывает сдвиговое искажение проецируемого изображения. Насколько мне известно, нет никакого аналога наклону оси для настоящей камеры-обскуры, но очевидно, что некоторые процессы оцифровки могут вызвать ненулевой перекос. Мы рассмотрим перекос подробнее позже.
Прочие геометрические свойства
Фокусное расстояние и смещение главной точки представляют собой простые перемещения пленки относительно точечного отверстия. Должны же быть другие способы трансформировать камеру, верно? А как насчет поворота или масштабирования пленки?
Вращение пленки вокруг точечного отверстия эквивалентно вращению самой камеры, которым управляет внешняя матрица.Вращение пленки вокруг любой другой фиксированной точки \ (x \) эквивалентно вращению вокруг отверстия \ (P \) с последующим перемещением на \ ((x-P) \).
А как насчет масштабирования? Должно быть очевидно, что удвоение всех размеров камеры (размера пленки и фокусного расстояния) не влияет на снимаемую сцену. Если вместо этого вы удвоите размер пленки и фокусное расстояние , а не , это будет эквивалентно удвоению обоих (без операции) и последующему уменьшению фокусного расстояния вдвое. Таким образом, явное представление масштаба фильма было бы излишним; он фиксируется фокусным расстоянием.
Фокусное расстояние — от пикселей до мировых единиц
Это обсуждение масштабирования камеры показывает, что существует бесконечное количество камер-обскур, которые производят одно и то же изображение. Внутренняя матрица касается только отношения между координатами камеры и координатами изображения, поэтому абсолютные размеры камеры не имеют значения. Использование пиксельных единиц для фокусного расстояния и смещения главной точки позволяет нам представить относительные размеры камеры, а именно положение пленки относительно ее размера в пикселях.
Другими словами, внутреннее преобразование камеры инвариантно к равномерному масштабированию геометрии камеры. Представляя размеры в пикселях, мы естественным образом фиксируем эту неизменность.
Вы можете использовать аналогичные треугольники для преобразования пиксельных единиц в мировые единицы (например, мм), если вы знаете хотя бы одно измерение камеры в мировых единицах. Например, если вы знаете, что пленка камеры (или цифровой датчик) имеет ширину \ (W \) в миллиметрах, а ширина изображения в пикселях равна \ (w \), вы можете преобразовать фокусное расстояние \ (f_x \) в мировых единиц, использующих:
\ [F_x = f_x \ frac {W} {w} \]
Другие параметры \ (f_y \), \ (x_0 \) и \ (y_0 \) могут быть преобразованы в их аналоги в мировых единицах \ (F_y \), \ (X_0 \) и \ (Y_0 \), используя аналогичные уравнения:
\ [ \ begin {array} {ccc} F_y = f_y \ frac {H} {h} \ qquad X_0 = x_0 \ frac {W} {w} \ qquad Y_0 = y_0 \ frac {H} {h} \ end {массив} \]
Как мы обсуждали ранее, только расположение точечного отверстия и материи пленки, поэтому физическая коробка, окружающая камеру, не имеет значения.По этой причине во многих обсуждениях геометрии камеры используется более простое визуальное представление: пирамида камеры.
Область обзора камеры имеет форму пирамиды, которую иногда называют «конусом видимости». Давайте добавим к нашей сцене несколько трехмерных сфер и покажем, как они попадают в конус видимости, и создадим изображение.
Так как «коробочка» камеры не имеет значения, снимем ее. Также обратите внимание, что изображение в фильме представляет собой зеркальную версию реальности. Чтобы исправить это, мы будем использовать «виртуальное изображение» вместо самого фильма.Виртуальное изображение имеет те же свойства, что и изображение на пленке, но в отличие от настоящего изображения виртуальное изображение появляется перед камерой, а проецируемое изображение переворачивается.
Обратите внимание, что положение и размер плоскости виртуального изображения произвольны — мы могли бы удвоить ее размер, если бы мы также удвоили расстояние от отверстия.
После удаления истинного изображения мы остаемся с представлением «усеченной пирамиды» нашей камеры-обскуры.
Точечное отверстие было заменено кончиком конуса видимости, и пленка теперь представлена виртуальной плоскостью изображения.Позже мы будем использовать это представление для нашей демонстрации.
В предыдущих разделах мы интерпретировали наши входящие 3-вектора как координаты трехмерного изображения, которые преобразуются в координаты однородного двухмерного изображения. В качестве альтернативы мы можем интерпретировать эти 3-вектора как однородные 2D-координаты, которые преобразуются в новый набор 2D-точек. Это дает нам новый взгляд на внутреннюю матрицу: последовательность двумерных аффинных преобразований.
Мы можем разложить внутреннюю матрицу на последовательность преобразований сдвига, масштабирования и смещения, соответствующих перекосу оси, фокусному расстоянию и смещению главной точки, соответственно:
\ [ \ begin {align} K & = \ left ( \ begin {array} {c c c} f_x & s & x_0 \\ 0 & f_y & y_0 \\ 0 & 0 & 1 \\ \ end {массив} \верно ) \\ [0.5em] знак равно \ underbrace { \оставил ( \ begin {array} {c c c} 1 & 0 & x_0 \\ 0 & 1 & y_0 \\ 0 и 0 и 1 \ end {массив} \верно ) } _ \ text {2D-перевод} \ раз \ underbrace { \оставил ( \ begin {array} {c c c} f_x & 0 & 0 \\ 0 & f_y & 0 \\ 0 и 0 и 1 \ end {массив} \верно ) } _ \ text {2D-масштабирование} \ раз \ underbrace { \оставил ( \ begin {array} {c c c} 1 & s / f_x & 0 \\ 0 & 1 & 0 \\ 0 и 0 и 1 \ end {массив} \верно ) } _ \ text {2D сдвиг} \ end {align} \]
Эквивалентное разложение помещает сдвиг после масштабирования :
\ [ \ begin {align} K & = \ underbrace { \оставил ( \ begin {array} {c c c} 1 & 0 & x_0 \\ 0 & 1 & y_0 \\ 0 и 0 и 1 \ end {массив} \верно ) } _ \ text {2D-перевод} \ раз \ underbrace { \оставил ( \ begin {array} {c c c} 1 & s / f_y & 0 \\ 0 & 1 & 0 \\ 0 и 0 и 1 \ end {массив} \верно ) } _ \ text {2D сдвиг} \ раз \ underbrace { \оставил ( \ begin {array} {c c c} f_x & 0 & 0 \\ 0 & f_y & 0 \\ 0 и 0 и 1 \ end {массив} \верно ) } _ \ text {2D-масштабирование} \ end {align} \]
Эта интерпретация прекрасно разделяет внешние и внутренние параметры на области 3D и 2D, соответственно.Также подчеркивается, что внутреннее преобразование камеры происходит после проекции . Одним из примечательных результатов этого является то, что внутренние параметры не могут влиять на видимость. — закрытые объекты не могут быть обнаружены простыми двухмерными преобразованиями в пространстве изображения.
Демо ниже иллюстрирует обе интерпретации внутренней матрицы. Слева — интерпретация «геометрии камеры». Обратите внимание, как точечное отверстие перемещается относительно плоскости изображения при настройке \ (x_0 \) и \ (y_0 \).
Справа — интерпретация «2D-трансформации». Обратите внимание, как изменение результатов фокусного расстояния приводит к масштабированию проецируемого изображения, а изменение главной точки приводит к чистому преобразованию.
Для этой демонстрации требуетсяJavascript.
Слева : сцена с камерой и просматриваемым объемом. Виртуальная плоскость изображения отображается желтым цветом. Справа : изображение камеры.
В ходе этой серии статей мы увидели, как разложить
- полная матрица камеры на внутреннюю и внешнюю матрицы,
- внешняя матрица в трехмерное вращение с последующим переносом, а
- внутреннюю матрицу на три основных 2D преобразования.\ text {Внешняя матрица} \\ [0.5em]
знак равно
\ overbrace {
\ underbrace {
\оставил (
\ begin {array} {c c c}
1 & 0 & x_0 \\
0 & 1 & y_0 \\
0 и 0 и 1
\ end {массив}
\верно )
} _ \ text {2D-перевод}
\ раз
\ underbrace {
\оставил (
\ begin {array} {c c c}
f_x & 0 & 0 \\
0 & f_y & 0 \\
0 и 0 и 1
\ end {массив}
\верно )
} _ \ text {2D-масштабирование}
\ раз
\ underbrace {
\оставил (
\ begin {array} {c c c}
1 & s / f_x & 0 \\
0 & 1 & 0 \\
0 и 0 и 1
\ end {массив}
\верно )
} _ \ text {2D сдвиг}
} ^ \ text {Внутренняя матрица}
\ раз
\ overbrace {
\ underbrace {
\ left (\ begin {array} {c | c}
Я & \ mathbf {t}
\ end {array} \ right)
} _ \ text {3D-перевод}
\ раз
\ underbrace {
\ left (\ begin {array} {c | c}
R & 0 \\ \ hline
0 и 1
\ end {array} \ right)
} _ \ text {3D-вращение}
} ^ \ text {Внешняя матрица}
\ end {align}
\]
Чтобы увидеть все эти преобразования в действии, перейдите на мою страницу «Игрушка с перспективной камерой», где представлена интерактивная демонстрация камеры с полной перспективой.
Есть ли у вас другие способы интерпретации внутренней матрицы камеры? Оставьте комментарий или напишите мне!
В следующий раз мы покажем, как подготовить откалиброванную камеру для создания пар стереоизображений. Увидимся позже!
Сообщение от Кайл Симек Пожалуйста, включите JavaScript, чтобы просматривать комментарии от Disqus. комментарии в блоге, разработанныеЧто такое калибровка камеры? — MATLAB и Simulink
Что такое калибровка камеры?
Геометрическая калибровка камеры , также называемая камерой резекция , оценивает параметры линзы и датчика изображения изображение или видеокамера.Вы можете использовать эти параметры для коррекции искажения объектива, измерения размер объекта в мировых единицах или определение местоположения камеры в сцене. Эти задачи используются в таких приложениях, как машинное зрение, для обнаружения и измерения объектов. Они также используются в робототехнике, для навигационных систем и реконструкции трехмерных сцен.
Примеры того, что вы можете сделать после калибровки камеры:
Параметры камеры включают внутренние, внешние и коэффициенты искажения.Оценить параметры камеры, вам необходимо иметь трехмерные мировые точки и соответствующие им двумерные изображения. точки. Вы можете получить эти соответствия, используя несколько изображений калибровочного шаблона, например, шахматная доска. Используя соответствия, вы можете найти параметры камеры. После калибровки камеры для оценки точности предполагаемых параметров вы можете:
-
Постройте относительное расположение камеры и калибровочного шаблона
-
Рассчитайте ошибки перепроецирования.
-
Рассчитайте ошибки оценки параметров.
Используйте калибратор камеры для калибровки камеры и оценить точность предполагаемых параметров.
Модели камер
Computer Vision Toolbox ™ содержит алгоритмы калибровки для модели камеры-обскуры и Рыбий глаз модель камеры. Вы можете использовать модель «рыбий глаз» с камерами до поля зрения (FOV) 195 градусов.
Алгоритм калибровки крошечного отверстия основан на модели, предложенной Жаном-Ивом Буге. [3]. Модель включает в себя модель камеры-обскуры [1] и искажение объектива [2]. Модель камеры-обскуры не учитывает искажение объектива, поскольку идеальная Камера-обскура не имеет объектива. Чтобы точно представить реальную камеру, полный модель камеры, используемая алгоритмом, включает радиальную и тангенциальную линзы искажение.
Из-за сильного искажения, производимого линзами «рыбий глаз», модель точечного отверстия не может смоделировать камеру «рыбий глаз».Подробнее о калибровке камеры с использованием модели «рыбий глаз» см. Основы калибровки «рыбий глаз».
Камера-обскура Модель
Камера-обскура — это простая камера без объектива и с одной маленькой апертурой. Световые лучи проходят через апертуру и проецируют перевернутое изображение на противоположной стороне. камеры. Думайте о плоскости виртуального изображения как о находящейся перед камерой и содержащий вертикальное изображение сцены.
Параметры камеры-обскуры представлены в матрице 4 на 3, называемой матрица камеры .Эта матрица отображает трехмерную мировую сцену в плоскость изображения. Алгоритм калибровки рассчитывает матрицу камеры с использованием внешнего и внутренние параметры. Внешние параметры представляют местоположение камеры. в 3-D сцене. Внутренние параметры представляют собой оптический центр и фокусное расстояние. камеры.
Мировые точки преобразуются в координаты камеры с помощью внешние параметры.Координаты камеры отображаются в плоскости изображения с помощью внутренние параметры.
Параметры калибровки камеры
Алгоритм калибровки рассчитывает матрицу камеры с использованием внешних и внутренние параметры. Внешние параметры представляют собой жесткое преобразование из 3-D мировую систему координат в систему координат трехмерной камеры. Внутренние параметры представляют собой проективное преобразование трехмерных координат камеры в двухмерные координаты изображения.
Внешние параметры
Внешние параметры состоят из вращения, R, и перевод, т. . Начало системы координат камеры в его оптическом центре и оси x- и y- определить плоскость изображения.
Внутренние параметры
Внутренние параметры включают фокусное расстояние, оптический центр, также известный в качестве главной точки и коэффициента перекоса.Камера собственная матрица, K , определяется как:
Перекос пикселей определяется как:
[cxcy] — Оптический центр (основная точка), дюйм пикселей. (fx, fy) — Фокусное расстояние в пикселях.
fx = F / px
fy = F / py
F — Фокусное расстояние в мировых единицах, обычно выражается в миллиметрах.
(px, py) — Размер пикселя в мировых единицах.s — Коэффициент перекоса, который не равен нулю, если изображение оси не перпендикулярны.
s = fxtanαИскажение при калибровке камеры
Матрица камеры не учитывает искажение объектива, потому что идеальная камера-обскура нет линзы. Чтобы точно представить реальную камеру, модель камеры включает радиальная и тангенциальная линзовые искажения.
Радиальное искажение
Радиальное искажение возникает, когда световые лучи отклоняются ближе к краям линзы, чем они делают в его оптическом центре.Чем меньше объектив, тем больше искажение.
Радиальная деформация коэффициенты моделируют этот тип искажения. Искаженные точки обозначается как ( x искажено , y искажено ):
x искажено = x (1 + k 1 * r 2 + k 2 * r 4 + k 3 * r 6 )
y искаженный = y (1 + k 1 * r 2 + k 2 * r 4 + k 3 * r 6 )
-
x , y — Неискаженное расположение пикселей. x и y являются в нормализованных координатах изображения. Нормализованные координаты изображения вычисляется из координат пикселей путем перевода в оптический центр и деление на фокусное расстояние в пикселях. Таким образом, x и y являются безразмерный.
-
к 1 , к 2 , и k 3 — Радиальное искажение коэффициенты линзы.
-
r 2 : x 2 + y 2
Обычно для калибровки достаточно двух коэффициентов.Для сильного искажения, например, в широкоугольных объективах, вы можете выбрать 3 коэффициента, включающих k 3 .
Тангенциальное искажение
Тангенциальное искажение возникает, когда линза и плоскость изображения не параллельны. Коэффициенты тангенциального искажения моделируют это тип искажения.
Искаженное точки обозначаются как ( x искажено , y искажено ):
x искажено = x + [2 * p 1 * x * y + p 2 * ( r 2 + 2 * x 2 )]
y искажено = y + [ p 1 * ( r 2 + 2 * y 2 ) + 2 * p 2 * x * y ]
-
x , y — Неискаженное расположение пикселей. x и y являются в нормализованных координатах изображения. Нормализованные координаты изображения вычисляется из координат пикселей путем перевода в оптический центр и деление на фокусное расстояние в пикселях. Таким образом, x и y являются безразмерный.
-
p 1 и p 2 — Коэффициенты тангенциальной дисторсии объектива.
-
r 2 : x 2 + y 2
Ссылки
[1] Zhang, Z.«Новая гибкая техника для камеры Калибровка ». транзакций IEEE для анализа шаблонов и машины Разведка . Vol. 22, № 11, 2000, с. 1330–1334.
[2] Хейккила Дж. И О. Сильвен. «Четырехступенчатая камера Процедура калибровки с неявной коррекцией изображения ». IEEE Международная конференция по компьютерному зрению и паттернам Признание . 1997.
[4] Брадски Г. и А. Келер. Изучение OpenCV: Компьютерное зрение с библиотекой OpenCV .Севастополь, Калифорния: О’Рейли, 2008.
См. Также
Приложения
Связанные темы
Формат файла матрицы проекции — документация Plastimatch 1.9.3
Матрицы проекции хранятся в формате файла ASCII, и включить полную геометрию, необходимую для расчета DRR или реконструкция КЛКТ. Эти файлы создаются программой «Drr» и используется программой «fdk».
Значение каждого поля поясняется ниже.Обратите внимание, однако, что комментарии не разрешены, поэтому этот пример не может быть загружен без предварительного снятия пояснений:
Image center
Центр изображения — это двухмерная координата в пиксельных координатах точка на изображении, ближайшая к источнику рентгеновского излучения. Или по-другому объяснить, если провести черту через источник, который также перпендикулярен изображению, эта линия пересекает изображение в центре изображения.
Центр изображения — это пара чисел с плавающей запятой в пикселях.Первое число — это столбец, второе число — это строка. Первый пиксель изображения считается координатным (0,0). Центр изображения не обязательно должен находиться в границах изображения.
Матрица проецирования
Матрица проекции представляет собой матрицу 3 x 4 однородный мир карт координаты в однородные пиксельные координаты.
Однородная мировая координата — это вектор 4 x 1. Вы можете преобразовать 3D координату (x, y, z) в однородные координаты, добавив 1: (x, y, z, 1).Вы можете преобразовать однородные координаты (x, y, z, w) в 3D координаты, сначала разделив каждый элемент на w, а затем взяв первые три элемента.
Аналогичная процедура преобразует двухмерные пиксельные координаты в и от однородных координат.
Лет:
Предположим, что система визуализации выровнена с мировыми координатами. в стандартную систему отсчета с источником рентгеновского излучения на местоположение (0,0,0), а панель перпендикулярна оси z, на расстоянии, определяемом SID.Предположим далее, что координата пикселя (0,0) выровнена с центр изображения, как показано здесь:
Отображение мировых координат в координаты изображения следовательно
, где K — внутренняя матрица , определенная как:
, где альфа и бета — это расстояние между пикселями для столбцов и ряды. Обратите внимание, что когда вы используете K, как определено выше, вам нужно будет добавить (c_i, c_j) позже к окончательному результату. чтобы получить координаты пикселей.
Для того, чтобы выровнять систему визуализации со стандартным эталоном кадр, нам нужно повернуть и сдвинуть.Это называется Внешняя матрица и определяется по формуле:
Здесь R — поворот, t — перенос. Сначала поворачиваются точки, затем добавляется перевод.
Например, если панель визуализации перпендикулярна оси y (вместо оси z) на расстоянии SID, а источник находился на position (1000,0,0), у нас будет:
Состав внутренней и внутренней матриц называется матрица проекции .Внешняя матрица вращает мировую координату кадр в стандартную систему отсчета. Затем внутренняя матрица выравнивает дополнительное измерение.
Далее, после вычисления (i, j, k), мы преобразуем из однородного в пиксельный координаты:
и, наконец, поправляем на центр изображения:
Калибровка камерыс помощью Python — OpenCV
Предварительные требования: OpenCV
Камера является неотъемлемой частью нескольких областей, таких как робототехника, исследование космоса и т. Д. Камера играет важную роль.Это помогает запечатлеть каждый момент и полезно для многих анализов. Чтобы использовать камеру в качестве визуального датчика, мы должны знать параметры камеры. Калибровка камеры — это не что иное, как оценка параметров камеры, параметры камеры необходимы для определения точной взаимосвязи между трехмерной точкой в реальном мире и ее соответствующей двухмерной проекцией (пикселем) в изображении, захваченном этой калиброванной камерой.
Нам необходимо учитывать как внутренние параметры, такие как фокусное расстояние, оптический центр, коэффициенты радиального искажения объектива и т. Д., а также внешние параметры, такие как вращение и перемещение камеры относительно некоторой системы координат реального мира.
Необходимые библиотеки:- OpenCV Библиотека в python — это библиотека компьютерного зрения, которая в основном используется для обработки изображений, обработки видео и анализа, распознавания лиц и т. Д.
- Numpy — это универсальный пакет для обработки массивов. Он предоставляет высокопроизводительный объект многомерного массива и инструменты для работы с этими массивами.
Калибровку камеры можно выполнить поэтапно:- Шаг 1: Сначала определите реальные координаты трехмерных точек, используя известный размер шаблона шахматной доски.
- Шаг 2: Захвачены различные точки обзора изображения шахматной доски.
- Шаг 3: findChessboardCorners () — это метод в OpenCV , используемый для нахождения пиксельных координат (u, v) для каждой трехмерной точки на разных изображениях
- Шаг 4: Затем calibrateCamera ( ) Метод используется для поиска параметров камеры.
Он будет принимать наши вычисленные (три точки, две точки, grayColor.shape [:: — 1], None, None) в качестве параметров и возвращает список, содержащий такие элементы, как Матрица камеры, коэффициент искажения, векторы вращения и . Векторы перевода.
Матрица камеры помогает преобразовывать точки 3D-объектов в точки 2D-изображения, а коэффициент искажения возвращает положение камеры в мире со значениями Rotation и Translation векторов
Ниже приведено полная программа вышеуказанного подхода:
Python3
importcv2importnumpy as np
importimport os globCHECKERBOARD=(6,9)
223.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER,30,0,001)threedpoints =[]=[]objectp3d=np.zeros ((1, CHECKERBOARD [0]1],3), нп.float32)objectp3d [0,:,:2]=np.mgrid [0: CHECKERBOARD] 923999990: CHECKERBOARD [1]]. T.reshape (-1,2)9 prev_imизображения=glob.glob ('* .jpg')дляимя файлавизображениях:изображение3 =923csgrayColor=cv2.cvtColor (image, cv2.COLOR_BGR2GRAY)0 0findChessboardCorners (grayColor, Checkerboard,
cv2.CALIB_CB_ADAPTIVE_THRESH+cv2.CALIB_CB_FAST_CHECK +cv2.CALIB_CB_NORMALIZE_IMAGE)еслиret==True:3
append (objectp3d)углы2=cv2.cornerSubPix (907 907 907 907 907 907 907 907 907 907 907), (-1,-1), критерии)две точки.append (corners2)image=cv2.drawChessboardCorners (image,cv2.imshow ('img', изображение)cv2.ожиданияret, матрица, искажение, r_vecs, t_vecs=cv2.calibrateCamera (трехточечный, двухточечный, серый цвет.,Нет)печать("Матрица камеры:")печать3 (матрица)9220003"\ n Коэффициент искажения:")печать(искажение)печать(9 0723"\ n Векторы вращения:")print(r_vecs)print("\ n Векторы перевода:"33(t_vecs)Вход:
Выход:
Матрица камеры: [[36.26378216 0. 125.68539168] [0. 36.76607372 142.49821147] [0. 0. 1.]] Коэффициент искажения: [[-1.254
e-03 9.89269357e-05 -2.818e-03 4.52760939e-04 -3.29964245e-06]] Векторы вращения: [массив ([[- 0,05767492], [0,03549497], [1.503]]), массив ([[- 0.09301982], [-0.01034321], [3.07733805]]), массив ([[- 0.02175332], [0,05611105], [-0.07308161]])] векторов перевода: [массив ([[4.63047351], [-3,74281386], [1.64238108]]), массив ([[2.31648737], [3.98801521], [1.64584622]]), массив ([[- 3.17548808], [-3,46022466], [1.68200157]])] Внимание компьютерщик! Укрепите свои основы с помощью курса Python Programming Foundation и изучите основы.
Для начала подготовьтесь к собеседованию. Расширьте свои концепции структур данных с помощью курса Python DS . И чтобы начать свое путешествие по машинному обучению, присоединяйтесь к Машинное обучение - курс базового уровня
Camera Matrix - обзор
3.2 Получение внутренних параметров камеры и трехмерных координат характерных точек
Предполагая, что мировые трехмерные координаты точки P в пространстве равны P w ( x w , y w , z w ) в опорном кадре камеры, а соответствующие ему координаты изображения - p ( x p , y p ). Согласно обычной модели камеры-обскуры и искажению объектива [11,12], они связаны следующими уравнениями проекции:
xn = xw / zwyw / zw = xy, r2 = x2 + y2,
xd = xd (1 ) xd (2) = (1 + k1r2 + k2r4) xn + 2p1xy + p2 (r2 + 2x2) p1 (r2 + 2y2) + 2p2xy,
(2) xpyp1 = Kxd (1) xd (2) 1withK = fxα · Fxu00fyv0001.
, где ( u 0 , v 0 ) - главная точка на плоскости изображения, x n и x d - идеальные и фактические координаты изображения p соответственно. f x и f y обозначают эффективное фокусное расстояние, k 1 , k 2 - коэффициенты радиального искажения, а p 1 , p 2 - коэффициенты тангенциального искажения. α - коэффициент перекоса, а K - матрица камеры. Все эти внутренние параметры могут быть получены заранее с помощью некоторых эффективных методов калибровки камеры [13,14], и они считаются фиксированными после калибровки камеры.
Учитывая, что интервал между характерными точками известен, можно получить трехмерные локальные координаты характерных точек в соответствующей системе координат камеры [9], которые обозначаются как aijl и bijr ( i = 1, 2, …, м , j = 1, 2,…, n ) соответственно.Если взять в качестве иллюстрации позу 1 на рис. характерная точка b 11 , b 31 при RCCF соответственно.
Однако существует одна потенциальная проблема, заключающаяся в том, что выбросы, которые являются центрами характерных точек, извлеченных на изображении, выходят далеко за пределы их наземной истинности, могут не дать нам правильно вычислить трехмерные координаты характерной точки в пространстве.Хотя мы сделали характерные точки на наших мишенях светящимися, чтобы избежать этой проблемы в большинстве условий, все же существует вероятность того, что центры одной или двух характерных точек будут извлечены с большой ошибкой. В этом состоянии мы должны использовать алгоритм RANSAC [15], чтобы проверить центр всех характерных точек, извлеченных на одном изображении, с целью обнаружения и устранения возможных выбросов заранее, а затем использовать следы, характерные точки с допустимым шумом. , чтобы продолжить нашу калибровку.И в этой статье мы предполагаем, что все извлеченные точки центра являются промежуточными и действительными.
Предположим, что в точке j th, единичные направления цели a , b при LCCF и RCCF равны ajl, bjl и ajr, bjr, соответственно, поэтому их можно вычислить по следующему уравнению:
(3) ajl = amjl-a1jl / amjl-a1jl, bjr = bmjr-b1jr / bmjr-b1jr, (j∈ [1, n]).
Калибровка камеры: объяснение искажений камеры :: Ori Codes
Поскольку мы используем только камеры для получения всех данных, которые мы будем использовать для движения нашей машины по реальному миру, мы уверены, что им очень доверяем.Мы надеемся, что они предоставят нам точные представления трехмерных объектов реального мира в виде двухмерных изображений, которые мы будем передавать в нашу нейронную сеть.
Но мы не должны принимать это как должное. Камеры, хотя и дешевые и простые в использовании, имеют множество проблем, когда дело доходит до правильного отображения 3D-мира на 2D-датчике / изображении. Но, к счастью, мы можем что-то с этим поделать.
Модель камеры-обскуры
Модель камеры-обскуры - это модель идеальной камеры, которая описывает математическую связь между координатами трехмерного объекта реального мира и его двухмерной проекцией на плоскость изображения.
Камеры-обскуры были самым началом фотографии и используются даже сегодня, чтобы объяснить студентам основы фотографии.
Они обладают некоторыми преимуществами перед нашими обычными фотоаппаратами:
- У них почти бесконечная глубина резкости; все, что появляется в фокусе.
- Для фокусировки света не используются линзы, поэтому они не искажают объектив, а широкоугольные изображения остаются абсолютно прямолинейными.
В основном, чем меньше становится точечное отверстие, тем больше увеличивается разрешение, пока мы не достигнем дифракционного предела, при котором изображение становится темнее и размытым.Кроме того, чем меньше точечное отверстие, тем меньше света попадает, поэтому необходимо увеличить время экспозиции. Это подводит нас к большой проблеме с ними:
- Их время экспозиции действительно велико, что приводит к значительному размытию движения вокруг любых движущихся объектов или их полному отсутствию, если они двигались слишком быстро.
Как получить маленькое отверстие, которое пропускает много света? Для начала мы можем использовать выпуклую линзу.
Почему это помогает: вместо одного луча света, освещающего одну точку изображения, теперь карандаши света освещают каждую точку изображения.Даже наши глаза используют линзы. 🙂
Но, конечно же, линзы вызывают проблемы, о которых мы упоминали ранее:
- У них конечная диафрагма, поэтому появляется размытость несфокусированных объектов.
- Они содержат геометрические искажения из-за линз, которые усиливаются по мере приближения к краям линз.
Виды перекосов
Первый и наиболее распространенный тип искажения объектива камеры называется радиальным искажением .
Есть два типа этого искажения: положительное или цилиндрическое радиальное искажение и отрицательное или подушкообразное радиальное искажение.
В контексте самоуправляемых RC вы, скорее всего, будете иметь дело с бочкообразным искажением, которое, скорее всего, будет вызвано линзами «рыбий глаз», поскольку мы хотели бы получить как можно большее поле зрения. Некоторые экшн-кулачки даже имеют угол обзора от 170 до 180 градусов, что вызывает большое количество положительных радиальных искажений.
Другой тип искажения, с которым вы можете столкнуться, называется тангенциальным искажением , которое возникает, когда линза не выровнена идеально параллельно плоскости изображения (датчику).Это заставляет изображение выглядеть наклонным, что, очевидно, плохо для нас, поскольку некоторые объекты смотрят дальше, чем они есть на самом деле.
При этом мы должны ожидать, что на самом деле ни одна камера не является действительно идеальной. Большинство, если не все, имеют некоторое количество радиальных и тангенциальных искажений, поскольку линзы несовершенны в реальной жизни, и линзы не всегда идеально соответствуют плоскости изображения.
Избавляемся от искажений с помощью OpenCV
К счастью для нас, радиальные и тангенциальные искажения можно описать с помощью пары коэффициентов:
- Коэффициенты $ k_n $ описывают радиальную дисторсию
- $ p_n $ коэффициенты описывают тангенциальное искажение
Чем хуже искажение, тем больше коэффициентов необходимо для его точного описания.
OpenCV работает с шестью ($ k_1 $, $ k_2 $, $ k_3 $, $ k_4 $, $ k_5 $ и $ k_6 $) коэффициентами радиального искажения, которых должно быть более чем достаточно для нас, и с двумя ($ p_1 $, $ p_2 $) коэффициенты тангенциального искажения.
Если у нас есть тип радиального искажения ствола, $ k_1 $ обычно будет больше нуля. Если у нас есть подушкообразное искажение, $ k_1 $ обычно будет меньше нуля.
OpenCV использует модель камеры-обскуры для описания создания изображения путем проецирования трехмерных точек на плоскость изображения с использованием преобразования перспективы:
++ s \ begin {bmatrix} {u} \\ {v} \\ {1} \ end {bmatrix} = \ begin {bmatrix} {f_x} & {0} & {c_x} \\ {0} & {f_y} & {c_y} \\ {0} & {0} & {1} \ end {bmatrix} \ begin {bmatrix} r_ {11} & r_ {12} & r_ {13} & t_1 \\ r_ {21} & r_ {22} & r_ {23} & t_2 \\ r_ {31} & r_ {32} & r_ {33} & t_3 \ end {bmatrix} \ begin {bmatrix} X \\ Y \\ Z \\ 1 \ конец {bmatrix} ++
- $ (X, Y, Z) $ - координаты трехмерной точки, которую мы визуализируем.
- $ (u, v) $ - 2D координаты точки проекции в пикселях
- Первая матрица после уравнения - это матрица камеры, содержащая внутренние параметры камеры.
- $ (c_x, c_y) $ определяет главную точку, которая обычно является центром изображения
- $ f_x $ и $ f_y $ - фокусные расстояния, выраженные в пикселях.
- Матрица, содержащая параметры $ r_ {mn} $, является совместной матрицей вращения-трансляции, матрицей внешних параметров, которая описывает движение камеры вокруг статической сцены.Он используется для перевода 3D-координат в 2D-систему координат, фиксированную по отношению к камере.
Поскольку мы визуализируем 2D-изображения, мы хотели бы сопоставить 3D-координаты с системой координат:
++ \ begin {bmatrix} {x} \\ {y} \\ {z} \ end {bmatrix} = R \ begin {bmatrix} {X} \\ {Y} \\ {Z} \ end {bmatrix} + t \\ х '= х / г \\ у '= у / г \\ и = f_x * x '+ c_x \\ v = f_y * y '+ c_y ++
Кроме того, поскольку мы не используем камеру-обскуру, нам нужно добавить коэффициенты искажения к нашей модели:
++ x '' = x '\ frac {1 + k_1 r ^ 2 + k_2 r ^ 4 + k_3 r ^ 6} {1 + k_4 r ^ 2 + k_5 r ^ 4 + k_6 r ^ 6} + 2 p_1 x' y '+ p_2 \\ y '' = y '\ frac {1 + k_1 r ^ 2 + k_2 r ^ 4 + k_3 r ^ 6} {1 + k_4 r ^ 2 + k_5 r ^ 4 + k_6 r ^ 6} + p_1 (r ^ 2 + 2 y '^ 2) + 2 p_2 x' y ' \\ \ text {где} \ quad r ^ 2 = x '^ 2 + y' ^ 2 \\ и = f_x * x '' + c_x \\ v = f_y * y '' + c_y ++
Поскольку мы в первую очередь заинтересованы в эффективном устранении радиального искажения, мы будем использовать модель деления Фитцгиббона в отличие от полиномиальной модели четного порядка Брауна-Конради, поскольку она требует меньшего количества членов в случаях сильного искажения.С ним также немного легче работать, поскольку инвертирование модели с разделением одного параметра требует решения полинома на одну степень меньше, чем инвертирование полиномиальной модели с одним параметром.
Определение внутренних и внешних параметров камеры
Теперь, когда мы изложили все формулы, которые мы используем для исправления радиального и тангенциального искажения, остается единственный вопрос, как получить внутренние и внешние параметры.
Для этих целей мы будем использовать функцию OpenCV calibrateCamera вместе с ее функцией findChessboardCorners .
Функция calibrateCamera основана на новой гибкой методике Чжана для калибровки камеры и наборе инструментов Caltech для калибровки камеры.
Ему нужны координаты 3D-объекта, который мы отображаем, и соответствующие ему 2D-координаты проекции, чтобы определять внутренние и внешние параметры камеры, которую мы используем для изображения объекта.
Чтобы легко получить эти координаты, мы будем использовать шахматную доску . Шахматная доска - это объект с известной нам геометрией и легко обнаруживаемыми характерными точками.Такие объекты называются калибровочными установками или шаблонами , а OpenCV имеет встроенную функцию, которая использует шахматную доску в качестве калибровочной установки, функцию findChessboardCorners .
Функция findChessboardCorners пытается определить, является ли входное изображение представлением шаблона шахматной доски, и автоматически определяет внутренние углы шахматной доски.
Самое замечательное в этом то, что мы можем распечатать 3D-объект (шахматную доску), геометрия которого нам хорошо известна, и сопоставить его 3D-координаты с нашей проекцией 2D-изображения.Трехмерные точки шахматной доски из реального мира называются объектными точками , а их двухмерные сопоставления на нашем изображении называются точками изображения .
Итак, мы распечатываем шахматную доску, делаем несколько ее снимков под разными углами, чтобы лучше уловить искажения камеры, и передаем их в функцию findChessboardCorners . Он вернет нам обнаруженные точки объекта и соответствующие точки изображения, которые мы сможем использовать для калибровки камеры.
Функция calibrateCamera, учитывая точки объекта и точки изображения с помощью функции findChessboardCorners , выполняет следующее:
- Вычисляет начальные внутренние параметры. Все коэффициенты искажения изначально установлены на нули.
- Оценивает начальную позу камеры, как если бы внутренние параметры были уже известны.
- Запускает глобальный алгоритм оптимизации Левенберга-Марквардта для минимизации ошибки перепроецирования, то есть общей суммы квадратов расстояний между наблюдаемыми характерными точками
imagePointsи проецируемыми (с использованием текущих оценок параметров камеры и поз) точками объектаobjectPoints.
Функция возвращает матрицу с внутренними параметрами камеры и матрицу с коэффициентами искажения, которые мы можем использовать, чтобы не искажать наши изображения.
Прочее, если вам нравится компьютерное зрение
Оптика - довольно интересная область физики, и если вы планируете заниматься какой-либо работой или исследованием в области компьютерного зрения, есть множество вещей, которые нужно изучить и прочитать, чтобы понять, как работают камеры, что поможет вам глубже погрузиться в эту область. .
Если вас это не интересует, пропустите небольшой абзац ниже.
Я бы рекомендовал хотя бы прочитать о двух наиболее важных параметрах оптических линз: фокусном расстоянии и максимальной диафрагме камеры.
Полезно знать, как разные фокусные расстояния влияют на представленный размер удаленных объектов, например:
Вы также можете многому научиться, прочитав, как фокусное расстояние определяет угол обзора, как фокусное расстояние (или число f) определяет максимальную используемую диафрагму объектива и так далее. Это действительно интересно.
Как определяются параметры внутренней и внешней камеры? - Поддержка
1. Внешние параметры камеры
2. Из 3D в 2D: внутренние параметры камеры
2.1 Перспективный объектив
2.1.1 Камера без искажения модели
2.1.2 Камера с искажением модели2.2 Линза рыбий глаз
3. Внешние параметры установки камеры
1. Внешние параметры камеры Параметры внешней камеры различны для каждого изображения.Их выдают:
- T = (T x , T y , T z ) положение центра проекции камеры в мировой системе координат.
- R матрица вращения, которая определяет ориентацию камеры с углами ω, φ, κ (соглашение PATB).
Если X = (X, Y, Z) является трехмерной точкой в мировой системе координат, ее положение X ' = (X', Y ', Z') в системе координат камеры определяется как:
Рисунок 1.Трехмерная геометрия внешнего вида камеры. Если смотреть от T к 3D-точке X, отображается изображение, видимое на экране. Мировая система координат определяется как Z указывает вверх, Y указывает на север, а X указывает на восток. 2. Из 3D в 2D: внутренние параметры камеры 2.1 Перспективная линза 2.1.1 Модель камеры без искажений Пиксельная координата (x u , y u ) трехмерной точечной проекции без искажения модели определяется выражением:
Где f - фокусное расстояние в пикселях, а (c x , c y ) главная точка в пиксельных координатах.
Рис. 2. Геометрия перспективной камеры без искажений. При взгляде от T 'к 3D-точке X' изображение отображается на экране, начало системы координат изображения находится в нижнем левом углу изображения. Системы координат изображения (X ', Y', Z ') на рисунках 1 и 2 соответствуют друг другу. 2.1.2 Модель камеры с искажением Лет:
- однородная точка,
квадрат 2D радиуса от оптического центра, R 1 , R 2 , R 3 радиальный и T 1 , T 2 тангенциальные коэффициенты искажения
.Искаженная однородная точка в системе координат камеры (x hd , y hd )
определяется как:Пиксельная координата (x d , y d ) трехмерной точечной проекции с моделью искажения определяется как:
Где f - фокусное расстояние в пикселях, а (c x , c y ) главная точка в пиксельных координатах.
2.2 Линза рыбий глаз Дисторсия для объектива «рыбий глаз» определяется следующим образом:
- Параметры C, D, E, F, описывающие аффинную деформацию кругового изображения в координатах
пикселей.
Диагональные элементы аффинной матрицы могут быть связаны с фокусным расстоянием f :
Недиагональные элементы связаны с искажением круга проецируемого изображения,
который в самом общем случае может быть повернутым эллипс. - Коэффициенты p 2 , p 3 , p 4 полинома:
Где:
Пиксельная координата (x d , y d ) трехмерной точечной проекции с моделью искажения «рыбий глаз» равна
.
, заданномуГде:
И (c x , c y ) - главная точка в координатах пикселей.
Пример:При использовании объектива Sigma 8 мм на камере Canon 6D с размером изображения 5472 x 3648 пикселей (рис. 3) внутренние параметры могут быть инициализированы следующим образом:
- (c x , c y ) = (5472/2, 3648/2) пиксель - центр круга проецируемого изображения
- p 2 = p 3 = p 4 = 0
- п. 1 = 1
- C = F = 1780 пикселей - радиус окружности изображения
- E = D = 0
Рисунок 3.Искажение объектива 8 мм Sigma на Canon 6D. 3. Внешние параметры установки камеры Камерная установка состоит из нескольких камер, соединенных между собой геометрическими ограничениями. Камерная установка имеет следующие характеристики:
- Одна камера принимается в качестве эталонной (ведущей) камеры с заданным положением T м и ориентацией R м в мировых координатах.
- Все остальные камеры являются дополнительными камерами с положением T s и ориентацией R s в мировых координатах.
- Для каждой дополнительной камеры известно относительное перемещение T отн.Формат матрицы фотоаппарата: Физический размер матрицы и его влияние на качество снимковПролистать наверх
-