| Добавить | |
| Характеристики | |
| Основные | |
| Класс | |
| Число мегапикселей матрицы | |
| Дисплей | |
| Видоискатель | |
| Тип объектива | |
| Матрица | |
| Тип матрицы | |
| Физический размер | |
| Число эффективных пикселов | |
| Разрешение матрицы | |
| Разрешение матрицы по Y | |
| Чувствительность ISO, мин | |
| Чувствительность ISO, макс | |
| Функция очистки матрицы | |
| Объектив | |
| Байонет | |
| Фокусное расстояние, мин | |
| Фокусное расстояние, макс | |
| Ручная фокусировка | |
| Стабилизатор изображения | |
| Светосила объектива | |
| Объектив в комплекте | |
| Дисплей и видоискатель | |
| Размер дисплея | |
| Тип дисплея | |
| Число точек дисплея | |
| Второй дисплей | |
| Поле зрения видоискателя | |
| Экспозиция и баланс белого | |
| Экспокоррекция | |
| Замер экспозиции | |
| Выдержка, макс | |
| Выдержка, мин | |
| Режимы экспозиции | |
| Брекетинг экспозиции | |
| Баланс белого | |
| Съемка | |
| Формат кадра | |
| Серийная съемка | |
| Число кадров в серии, JPEG | |
| Число кадров в серии, RAW | |
| Формат файла | |
| Автоспуск | |
| Видео и звук | |
| Формат записи видео | |
| Разрешение видео, макс | |
| Частота кадров, макс | |
| Запись звука | |
| Вспышка | |
| Встроенная вспышка | |
| Дальность действия | |
| Система замера вспышки | |
| Подавление «Красных глаз» | |
| Подсветка автофокуса | |
| Горячий башмак | |
| Брекетинг вспышки | |
| Синхроконтакт | |
| Память | |
| Поддержка карт памяти | |
Интерфейсы и доп.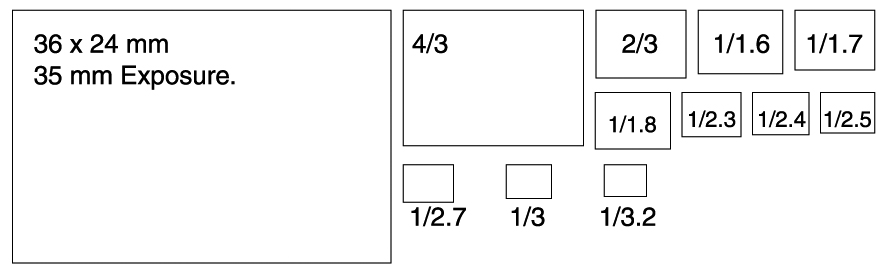 функции функции | |
| Интерфейсы | |
| Дистанционное управление | |
| Питание | |
| Аккумулятор | |
| Запас заряда | |
| Корпус | |
| Материал | |
| Габариты | |
| Вес |
Антимаркетинг: сравниваем камеры популярных смартфонов
Производители смартфонов прибегают к разным трюкам, показывая возможности встроенных камер и «забывая» сказать, почему вы вряд ли получите аналогичный результат. Мы попробуем подкинуть пищу для размышлений и помочь вам противостоять такой недобросовестной рекламе.
Методика тестированияВ этой статье сравниваются самые ходовые модели 2018 – 2019 года выпуска из среднего ценового сегмента. Формально в него же попадают и подешевевшие флагманы прошлых лет, но давайте ограничимся смартфонами одного исходного класса.
За снимками обратимся к специалистам из GSMArena. Они тестируют камеры смартфонов с 2010 года и накопили очень внушительную базу. Обычному покупателю будет сложно понять результат из тестовых таблиц, поэтому мы сделаем необходимые пояснения.
В сравнении принимают участие только основные (тыловые) камеры, работающие в автоматическом режиме при съёмке одиночных кадров цветных постеров и специальной тестовой карточки – фотографической миры PIMA/ISO 12233.
На всех смартфонах отключены бьюти-фильтры, искусственный недоинтеллект и прочие улучшалки, а где это возможно – установлен стиль изображения «точное». Смартфоны установлены на штатив. Делается серия кадров, из которой вручную выбирается самое резкое изображение. Для полноты картины съёмка повторяется в условиях нормальной и низкой освещённости. Значения ISO и выдержки, а также баланс белого устанавливаются камерами автоматически.
Матрицы и фокусные расстояния у всех разные, поэтому размер изображения тоже будет отличаться.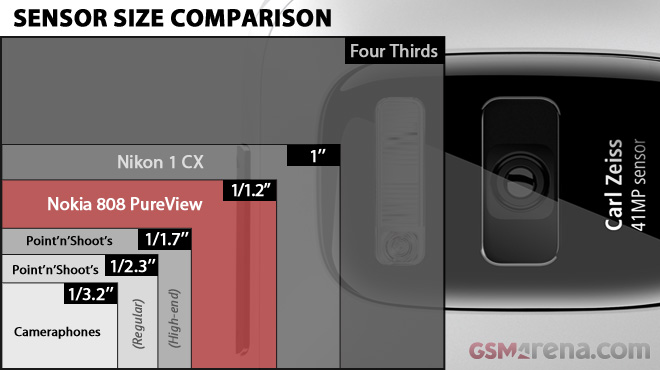 Мы приводим идентичные фрагменты исходных кадров в формате PNG безо всякого масштабирования.
Мы приводим идентичные фрагменты исходных кадров в формате PNG безо всякого масштабирования.
Если говорить о макро-режиме при ярком освещении, то здесь на разрешение больше всего влияет объектив. У всех смартфонов среднего уровня оптика одного класса, поэтому оно примерно одинаковое и находится в районе 12 – 16 линий на миллиметр. Вот как это выглядит на оказавшейся под рукой координатной сетке для цифровых микроскопов (100% кроп без обработки с 12 МП матрицы при ISO 100, съёмка со штатива).
Координатная сетка с шагом 0,1 мм (кликните, чтобы открыть на отдельной вкладке).Между рисками миллиметровой шкалы есть ещё девять тонких линий (цена деления 0,1 мм), и они чётко видны. 20 и более линий на миллиметр (lpmm) смартфон уже не покажет – они просто визуально сольются.
При обычной съёмке (с расстояния 40 см и более) широкоугольный объектив смартфона не способен передать мелкие детали из-за их малого углового размера. На общее восприятие картинки в большей степени влияет уже матрица, а она в любом смартфоне оставляет желать лучшего из-за очень низкого соотношения сигнал/шум.
Вообще измерение оптического разрешения камеры – довольно сложная и дорогая задача. Мы возьмём профессиональные таблицы, но не будем вас мучить математикой. Просто скажем, что коэффициент пересчёта в lpmm для них составляет 0,075. То есть, если вы видите отдельные линии до маркера «20», а на промежуточной отметке «22» они уже слились, значит – разрешение составит полторы линии на миллиметр.
Насколько это много? Такая характеристика типична для цифромыльниц, которые сегодня вытеснили смартфоны. Системные камеры и зеркалки любительского уровня со съёмным объективом в комплекте обычно дают 20-30 lpmm (в самой резкой зоне по центру), а профессиональные – до 100 lpmm, но разглядеть это великолепие можно только при использовании полнокадровых и среднеформатных матриц. В смартфоне такие просто негде разместить.
Сравнение физических размеров матриц у смартфонов и разной фототехники (картинка кликабельна). Оценка результатов
Оценка результатов
В верхнем ряду каждого снимка представлена пара фрагментов миры. Смотрим, где линии впервые видны по-отдельности. Настолько чётко, что их легко сосчитать. Чем левее (больше значение в подписи), тем выше реальная разрешающая способность камеры. Для наглядного сравнения относительных результатов этого достаточно, а определение точных частотно-контрастных характеристик оставим лабораториям, специализирующимся на оптике.
Второй ряд демонстрирует цветную вышивку на сером фоне. Он хорошо показывает степень детализации изображения и характер его огрубления при съёмке в полутьме.
Третий ряд показывает точность автофокуса на цветном фоне и качество цветопередачи в разных условиях освещения. Некоторые смартфоны искусственно усиливают яркость и/или насыщенность отдельных оттенков, делая цвета неестественными.
Характеристики камеры: 13 MP, f/1.8, PDAF (подробнее см. раздел «Краткий словарь терминов»).
раздел «Краткий словарь терминов»).
У Huawei P Smart (2019) камера «мылит» вплоть до отметки «24». Действительно отдельными линии начинают восприниматься с промежуточного маркера 22 и далее (подробнее см. раздел «Оптическое разрешение»). Точнее трудно сказать из-за того, что изображение слегка не в фокусе (напомню, что это лучшая попытка в серии). Автофокус у P Smart явно оставляет желать лучшего.
Правый верхний угол снимка показывает диапазон яркости камеры. На нём видны провалы в тенях. Полутона после отметки 15 сливаются в сплошной чёрный. Впрочем, это совершенно типичный результат для смартфонов. Немного расширить диапазон яркости поможет съёмка в HDR (только статичных объектов со штатива) или в RAW (хотя у смартфонов это повышает разрядность каждого канала всего до 10-12 бит, а не до 14 бит, как у зеркалок).
Пара изображений посередине демонстрирует детализацию при минимальном ISO (слабое или выключенное шумоподавление) и высоком ISO (сильное шумоподавление). На левой картинке текстура вышивки сильно смазана (отчасти это объясняется и небольшой промашкой автофокуса), а на правой сглаживание затронуло даже крупные стежки. Также ожидаемо видим ухудшение цветопередачи – серые вертикальные линии теперь выглядят зелёными (цвета окружающего их фона).
На левой картинке текстура вышивки сильно смазана (отчасти это объясняется и небольшой промашкой автофокуса), а на правой сглаживание затронуло даже крупные стежки. Также ожидаемо видим ухудшение цветопередачи – серые вертикальные линии теперь выглядят зелёными (цвета окружающего их фона).
Вообще с цветопередачей тёмных полутонов у Huawei P Smart (2019) дела обстоят неважно, особенно на высоких значениях ISO. Это видно и на картинке с цветными карандашами, где тёмно-зелёный и тёмно-синий грифель на ISO 64 ещё хоть как-то различимы, а при ISO 800 уже выглядят практически одинаково чёрными. Баланс белого также далёк от идеального. Серый фон миры в левом верхнем углу имеет зеленоватый оттенок.
Камера: 16 MP, f/2.2, PDAF
(кликните для увеличения)У P20 lite лучше сработал автофокус (изображение более резкое), однако из-за мелких пикселей (1,0 мкм) видим сильные цветовые шумы. В результате их подавления итоговое разрешение снимка даже чуть ниже, чем у P Smart – до маркера «20» линии сливаются.
На высоких ISO ослик выглядит бледным и зернистым даже в районе гладкой серой вставки. Кстати, ISO пришлось поднимать до 1000 единиц – сказывается сравнительно низкая светосила объектива.
Зато баланс белого очень хорош, а вертикальные полоски седла в полутьме сохранили настоящий серый цвет – огрубление цветопередачи у P20 Lite не такое сильное. При хорошей освещённости картинка и вовсе радует – угадываются средние по размеру стежки, а на карандашах можно разглядеть текстуру.
Huawei Mate 20 liteКамера: 20 MP, f/1.8, PDAF.
(кликните для увеличения)Число мегапикселей растёт, а эффективная разрешающая способность в лучшем случае остаётся такой же. При ярком освещении все изображения выглядят презентабельно. Цвета не вызывают каких-то сомнений, хотя баланс белого слегка смещён в область более низкой цветовой температуры (серый выглядит желтоватым).
При слабом освещении автофокус промахнулся – вышивка получилась очень смазанной и бледной. Цвета поплыли: серый фон порозовел, а тёмно-зелёный стал более синим (бирюзовым). От текстуры дерева не осталось и следа. В полутьме таким смартфоном даже не стоит пытаться фотографировать.
Цвета поплыли: серый фон порозовел, а тёмно-зелёный стал более синим (бирюзовым). От текстуры дерева не осталось и следа. В полутьме таким смартфоном даже не стоит пытаться фотографировать.
Камера: 20 MP, f/1.8, PDAF
(кликните для увеличения)Казалось бы, имеем те же 20 мегапикселей при диафрагме 1.8 и то же разрешение, но в итоге получаем немного другой результат. Баланс белого смещён в противоположную сторону: занижен синий канал и слегка завышен зелёный. Провалы в тенях чуть глубже – уже с маркера «13» всё сливается в чёрный. Зато автофокус точнее сработал, из-за чего вышивка выглядит детальнее – очень чёткие края. На высоких ISO изображение такое же замыленное, а серые стежки на зелёном фоне опять стали зелёными.
Honor 10 LiteКамера: 13 MP, f/1.8, PDAF.
(кликните для увеличения)Облегчённая версия десятого «Хонора» вытягивает разрешение до отметки «24» и даже чуть больше, но тёмные полутона сливаются как у всех. Баланс белого слегка смещён в сторону тёплых оттенков. Сами цвета выглядят естественно. Детализация средняя при хорошем освещении. Съёмка в темноте чуть лучше по сравнению с 8X – текстуры сглаживаются, но не пропадают. Тонкие серые полосы также стали зелёными, края объектов заметно размыты из-за сильного шумоподавления.
Баланс белого слегка смещён в сторону тёплых оттенков. Сами цвета выглядят естественно. Детализация средняя при хорошем освещении. Съёмка в темноте чуть лучше по сравнению с 8X – текстуры сглаживаются, но не пропадают. Тонкие серые полосы также стали зелёными, края объектов заметно размыты из-за сильного шумоподавления.
Камера: 12 MP, f/1.8, PDAF.
(кликните для увеличения)Отдельные линии видны от промежуточного маркера 22. При 12 Мп эффективное разрешение снимков почти такое же, как у Huawei Mate 20 lite с его 20 Мп сенсором. Сказывается увеличенный размер пикселей (1,4 мкм), дающий сравнительно низкие шумы.
Баланс белого плывёт в сторону низкой цветовой температуры (слегка желтит). Провалы в тенях довольно глубокие (столбики градиентной заливки 14 – 19 сливаются). Текстура карандашей немного смазана, цвета естественные.
При ярком освещении вышивка выглядит очень детально: видно даже мелкие стежки. Это один из самых резких кадров в обзоре. На высоких ISO автофокус наводится точнее, чем у большинства смартфонов, но сглаживание и огрубление цветопередачи при этом сильнее заметны.
На высоких ISO автофокус наводится точнее, чем у большинства смартфонов, но сглаживание и огрубление цветопередачи при этом сильнее заметны.
Камера: 12 MP, f/1.8, Dual Pixel PDAF
(кликните для увеличения)Главное отличие – технология улучшенного фазового автофокуса. Как плоские, таки и объёмные предметы на всех снимках очень чёткие. Эффективное разрешение аналогично Moto G6 – линии сливаются в районе маркера «22».
Алгоритм подавления яркостных шумов здесь менее агрессивный, поэтому сравнительно высокая детализация сохраняется даже на высоких значениях ISO. Цвета почти не бледнеют и слабо искажаются – серые полоски на зелёном фоне остаются серыми.
Samsung Galaxy A7 (2018)Камера: 24 МP, f/1.7, PDAF
(кликните для увеличения)Работу автофокуса трудно назвать образцовой – фотографии карандашей смазаны даже при съёмке в условиях яркого освещения. Оптическое разрешение камеры весьма радует: отдельные линии видны вплоть до маркера «28», хроматических аберраций невооружённым глазом не наблюдается.
Очень заметна светосильная оптика: в то время как другие смартфоны поднимают ISO до 800 – 1000 единиц, A7 в тех же условиях достаточно 400. Как результат – меньше яркостных шумов и чище картинка.
Однако алгоритмы цветового шумоподавления зачем-то сделали очень агрессивными – текстура карандашей пропала полностью даже при ISO50, вместо рисунка дерева видно только мутные пятна. Мелкие стежки на вышивке превратились в группу артефактов. Вот так на уровне софта можно угробить хорошую аппаратную платформу.
Xiaomi RedMi Note 7Камера: 48 MP, f/1.8, PDAF
(кликните для увеличения)С яркостным диапазоном у этой камеры всё как обычно, поэтому мы пропустим 50 оттенков серого, чтобы показать иллюзию 48 мегапикселей за счёт технологии Quad Bayer Array. Здесь её работа отчётливо видна в верхнем ряду.
Повышение количества пикселей матрицы в четыре раза никак не влияет на реальное оптическое разрешение: на обоих снимках линии сливаются за маркером 22. Более того, на них очень заметны хроматические аберрации – это кривая работа алгоритма интерполяции «тетрапикселей» (см. Краткий словарь терминов) на этапе дематризации.
Более того, на них очень заметны хроматические аберрации – это кривая работа алгоритма интерполяции «тетрапикселей» (см. Краткий словарь терминов) на этапе дематризации.
Автофокус не смог точно навестись на резкость, поэтому даже при хорошем освещении мелкие детали смазываются. Текстура карандашей выглядит как артефакты пикселизации. С таким же успехом вы можете растянуть вчетверо картинку, снятую на Honor 8X, Moto G6 или Nokia 7.1.
Xiaomi Mi8 LiteКамера: 12 МP, f/1.9, Dual Pixel PDAF
(кликните для увеличения)Оптическое разрешение чуть выше среднего для группы прямых конкурентов – линии сливаются за маркером «22». Диапазон яркости максимальный для восьмибитной растровой картинки – различимы все градиентные столбики до маркера 16 (B) включительно.
Радуют щадящие алгоритмы шумоподавления. На всех снимках хорошо видна текстура и мелкие детали. Их можно разглядеть даже на ISO 800, что большая редкость.
Баланс белого смещён в сторону жёлто-зелёного оттенка. Автофокус Dual Pixel PDAF работает менее точно, чем аналогичный у Nokia 7.1.
Автофокус Dual Pixel PDAF работает менее точно, чем аналогичный у Nokia 7.1.
PDAF – Phase Detection Auto Focus, фазовый автофокус. Для проверки автоматической фокусировки в нём определяется схождение лучей из нескольких точек с центра и краёв объектива. В «зеркалках» он работает шустро и довольно точно, а в телефонах – гораздо хуже из-за габаритных ограничений. В темноте часто промахивается, так как часть лучей просто не фиксируется и проверить их сходимость не удаётся.
Dual Pixel PDAF – улучшенный фазовый автофокус, в котором для оценки резкости используется почти вся площадь матрицы. Гораздо быстрее и точнее PDAF. Разница особенно заметна при низкой освещённости.
Laser AF – лазерный автофокус. Работает как лазерный дальномер. Объект съёмки подсвечивается ИК-лазером, после чего оценивается время получения отражённого от него света. По этим данным вычисляется расстояние до объекта, а блок линз быстро перемещается на заранее заданную величину. В целом работает быстрее PDAF и даёт меньше ошибок (особенно в темноте), но из-за низкой мощности лазера его заявленная дальность ограничена пятью метрами, а реально эффективная – двумя-тремя.
В целом работает быстрее PDAF и даёт меньше ошибок (особенно в темноте), но из-за низкой мощности лазера его заявленная дальность ограничена пятью метрами, а реально эффективная – двумя-тремя.
f/x.y – диафрагменное число, или просто диафрагма. Показывает светопропускание объектива через отношение входного зрачка объектива (принимается за единицу) к заднему фокусному расстоянию. У смартфонов регулируемой диафрагмы нет, поэтому f принимается соответствующим её максимально открытому положению. Условно говоря, чем меньше знаменатель – тем лучше. Например, камера с f/1.8 пропускает за единицу времени больше света (обладает большей светосилой), чем с f/2.2. В одинаковых условиях первая будет снимать на более коротких выдержках и/или устанавливать меньшее значение ISO, что положительно скажется на качестве снимка.
ISO – светочувствительность матрицы, оцениваемая по стандарту ISO 12232:2006. Чем выше ISO, тем при более низкой освещённости можно снимать, но достигается это ценой повышения яркостных шумов. На ISO 50 – 200 эти шумы незначительны и картинка выглядит максимально чёткой. На ISO 800 и выше включаются алгоритмы агрессивного шумоподавления, из-за чего изображение становится блёклым и сильно сглаженным. Мелкие детали теряются полностью, цветопередача огрубляется.
На ISO 50 – 200 эти шумы незначительны и картинка выглядит максимально чёткой. На ISO 800 и выше включаются алгоритмы агрессивного шумоподавления, из-за чего изображение становится блёклым и сильно сглаженным. Мелкие детали теряются полностью, цветопередача огрубляется.
1/x.y» – эквивалентный размер матрицы. Чем меньше число в знаменателе, тем крупнее матрица (см таблицу в начале статьи). Сами пиксели (при одинаковом разрешении) тоже крупнее, поэтому ниже уровень цветовых шумов. Проще говоря, в пределах одного поколения матрица 1/1.7″ даёт более детальное изображение, чем 1/2.7″.
X мм – фокусное расстояние в эквиваленте кадра 35-мм плёнки. Чем меньше это значение, тем более широкий угол обзора у камеры. Больше объектов влезает в кадр ценой усиления геометрических искажений.
MP – разрешение матрицы в мегапикселях (миллионах точек). Правило «чем больше, тем лучше» здесь работает только до определённого предела – пока размер пикселей не станет слишком мелким. Сейчас у лучших матриц для смартфонов пиксели от 1,2 мкм и более, но обратите внимание: 1,6 мкм обычно указывается как маркетинговый ход. У современных матриц 40 MP эквивалентны десяти «тетрапикселям» – квадрату из четырёх пикселей под общим светофильтром одного цвета (технология Quad Bayer Array). Здесь 1,6 мкм – сторона квадрата. Нетрудно подсчитать, что размер одного пикселя составляет 0,8 мкм.
Сейчас у лучших матриц для смартфонов пиксели от 1,2 мкм и более, но обратите внимание: 1,6 мкм обычно указывается как маркетинговый ход. У современных матриц 40 MP эквивалентны десяти «тетрапикселям» – квадрату из четырёх пикселей под общим светофильтром одного цвета (технология Quad Bayer Array). Здесь 1,6 мкм – сторона квадрата. Нетрудно подсчитать, что размер одного пикселя составляет 0,8 мкм.
В нашем кратком сравнении участвовали десять смартфонов с матрицами от 12 до 48 Мп. С лёгкой руки маркетологов большинство покупателей считают, что чем больше мегапикселей, тем лучше изображение. Возможно, это и было так на заре цифровой фотографии (разница между 0,3 и 3 Мп действительно не вызывает сомнений), но сейчас дальнейшая гонка за разрешением КМОП-сенсора у смартфонов потеряла смысл. Картинка просто становится крупнее, а вот будет ли она детальнее – зависит совершенно от других факторов. Главные из них – свойства оптической системы, физические размеры матрицы и алгоритмы обработки.
Каждый элемент объектива вносит свои оптические аберрации, а процессор обработки изображений ещё сильнее искажает картинку, пытаясь подавить цифровой шум. Особенно это заметно на крошечных матрицах смартфонов. В какой-то момент достигается предел разрешающей способности системы, и вы больше не увидите новых деталей, как бы сильно ни увеличивали фотографию. Первые «зеркалки» с матрицами 3 – 5 Мп и нормальным объективом до сих пор снимают лучше любого смартфона, будь в нём хоть 48 миллионов подслеповатых наноглаз.
Гораздо большее значение для смартфона имеет система автофокуса, светосила и настройка программных алгоритмов шумоподавления. Большинство кадров снимаются с рук, поэтому оптическая стабилизация очень выручит. Если же её нет, или она формальная – добавьте света (это укоротит выдержку и/или ISO, сделав снимок чётче и чище), либо воспользуйтесь штативом.
Баланс белого не совсем корректно определяется всеми смартфонами даже в идеальных условиях съёмки, поэтому по возможности снимайте в RAW. Тогда при постобработке вы просто укажите нужную цветовую температуру, и все полутона автоматически исправятся без потерь. Также этот формат позволит вам немного увеличить диапазон яркости и скорректировать свет/тень без появления заметных артефактов.
Тогда при постобработке вы просто укажите нужную цветовую температуру, и все полутона автоматически исправятся без потерь. Также этот формат позволит вам немного увеличить диапазон яркости и скорректировать свет/тень без появления заметных артефактов.
Матрицы фотоаппаратов Nikon
© 2017 Vasili-photo.com
В приведённой ниже таблице собраны некоторые сведения о матрицах, использующихся в цифровых зеркальных фотоаппаратах Nikon.
Каждая строка таблицы соответствует определённой матрице. Для каждой матрицы указаны производитель и модель (за исключением тех случаев, когда модель неизвестна). Далее перечислены фотоаппараты Nikon, в которых данный сенсор когда-либо использовался (камеры, выпускающиеся в настоящее время, выделены жирным шрифтом). Затем указан период, на протяжении которого матрица (точнее, оснащаемые ей камеры) находилась (или находится) в производстве, тип матрицы, её формат, число мегапикселей и общий рейтинг качества изображения по данным DxOMark.
| Производитель и модель матрицы | Камеры | Годы выпуска | Тип матрицы | Формат | Мп | Рейтинг DxOMark |
| Sony IMX309AQJ | D850 | с 2017 | КМОП | FX | 45,4 | 100 |
| Sony IMX321 | D500, D7500 | с 2016 | КМОП | DX | 20,9 | 84-86 |
| Sony T4K54 | D5 | с 2016 | КМОП | FX | 20,8 | 88 |
| Sony IMX193AQK | D5300, D3300, D5500, D3400, D5600 | с 2013 | КМОП | DX | 24,2 | 82-86 |
| Toshiba HEZ1 TOS-5105 |
D5200, D7100, D7200 | 2012-2017 | КМОП | DX | 24,2 | 83-87 |
| Sony IMX128AQP | D600, D610, D750 | с 2012 | КМОП | FX | 24,3 | 93-94 |
| Nikon NC81369R | D3200 | 2012-2014 | КМОП | DX | 24,2 | 81 |
| Sony IMX094AQP | D800, D810 | 2012-2017 | КМОП | FX | 36,3 | 95-97 |
| Nikon NC81366W | D4, D4s, Df | с 2012 | КМОП | FX | 16,2 | 89 |
| Sony IMX071 | D7000, D5100 | 2010-2013 | КМОП | DX | 16,2 | 80 |
| Nikon NC81362A | D3100 | 2010-2012 | КМОП | DX | 14,2 | 67 |
| Nikon NC81361A | D3s | 2009-2011 | КМОП | FX | 12,1 | 82 |
| Sony IMX028 (?) | D3X | 2008-2012 | КМОП | FX | 24,5 | 88 |
| Sony IMX038BQL | D90, D5000, D300s | 2008-2014 | КМОП | DX | 12,3 | 70-73 |
| Sony IMX038BQL | D300 | 2007-2009 | КМОП | DX | 12,3 | 67 |
| Nikon NC81338L | D3, D700 | 2007-2012 | КМОП | FX | 12,1 | 81 |
| Sony ICX493AQA | D80, D40x, D60, D3000 | 2006-2010 | ПЗС | DX | 10,2 | 61-65 |
| Sony ICX483AQA | D200 | 2005-2007 | ПЗС | DX | 10,2 | 64 |
| Sony IMX007AQ | D2X, D2Xs | 2004-2008 | КМОП | DX | 12,2 | 59 |
| Sony ICX453AK | D70, D70s, D50, D40 | 2004-2009 | ПЗС | DX | 6,1 | 50-56 |
| Nikon JFET-LBCAST | D2H, D2Нs | 2003-2007 | LBCAST | DX | 4,1 | 40 |
| Sony ICX413AQ | D100 | 2002-2005 | ПЗС | DX | 6,1 | — |
| Sony | D1X | 2001-2004 | ПЗС | DX | 5,3 | — |
| Sony | D1, D1H | 1999-2003 | ПЗС | DX | 2,7 | — |
Очевидно, что основным поставщиком сенсоров для фотоаппаратов Nikon является компания Sony, однако время от времени Nikon использует матрицы собственного производства. Впрочем, некоторые матрицы Nikon (NC81338L, NC81361A, NC81362A, NC81366W и NC81369R) были лишь спроектированы инженерами Nikon, а их непосредственным производством занималась компания Renesas.
Впрочем, некоторые матрицы Nikon (NC81338L, NC81361A, NC81362A, NC81366W и NC81369R) были лишь спроектированы инженерами Nikon, а их непосредственным производством занималась компания Renesas.
В фотокамерах D5200, D7100, D7200 установлен сенсор Toshiba. В 2015 году Sony скупила заводы Toshiba, занимающиеся производством фотоматриц, и потому в качестве производителя матрицы T4K54, используемой в фотоаппарате Nikon D5, указан нынешний владелец завода, на котором она выпускается, т.е. Sony, несмотря на то, что раньше этот завод принадлежал Toshiba.
Мне неизвестны модели сенсоров, использовавшихся в первых цифровых зеркальных фотоаппаратах Nikon – D1, D1H и D1X. Кроме того, я не вполне уверен: точно ли в Nikon D3X устанавливалась та же самая матрица Sony IMX028, что и в Sony α900.
Для некоторых сенсоров общий рейтинг матрицы DxOMark указан в виде диапазона. Это связано с тем, что качество изображения зависит не только от самой матрицы, но и от сопутствующей ей электроники (АЦП, процессор и пр. ), а также от алгоритмов первичного шумоподавления и оцифровки сигнала. Вследствие этого у разных фотокамер, оснащённых одним и тем же сенсором, качество изображения может незначительно различаться. Например, общий рейтинг DxOMark для Nikon D810 составляет 97 баллов, а для Sony A7R – 95 баллов, хотя матрица в обеих камерах одна и та же – Sony IMX094AQP. Иными словами, Nikon ухитряется добиваться от сенсоров Sony большей производительности, чем это получается у самой Sony.
), а также от алгоритмов первичного шумоподавления и оцифровки сигнала. Вследствие этого у разных фотокамер, оснащённых одним и тем же сенсором, качество изображения может незначительно различаться. Например, общий рейтинг DxOMark для Nikon D810 составляет 97 баллов, а для Sony A7R – 95 баллов, хотя матрица в обеих камерах одна и та же – Sony IMX094AQP. Иными словами, Nikon ухитряется добиваться от сенсоров Sony большей производительности, чем это получается у самой Sony.
Спасибо за внимание!
Василий А.
Post scriptum
Если статья оказалась для вас полезной и познавательной, вы можете любезно поддержать проект, внеся вклад в его развитие. Если же статья вам не понравилась, но у вас есть мысли о том, как сделать её лучше, ваша критика будет принята с не меньшей благодарностью.
Не забывайте о том, что данная статья является объектом авторского права. Перепечатка и цитирование допустимы при наличии действующей ссылки на первоисточник, причём используемый текст не должен ни коим образом искажаться или модифицироваться.
Желаю удачи!
|
Дата публикации: 14.01.2016 Последнее обновление: 27.09.2017 |
Вернуться к разделу «Фотооборудование»
Перейти к полному списку статей
CCD (ПЗС) — фото матрицы, сравнение с КМОП (cmos), плюсы и минусы.
CCD (Charge Coupled Device, ПЗС, прибор с зарядовой связью)- технология производства светочувствительных матриц для оптического оборудования: камеры мобильных телефонов, цифровые и зеркальные фотоаппараты, медицинское оборудование & etc.
Информация с каждой чувствительной ячейки считывается в память фотокамеры последовательно, что не позволяет сделать следующий кадр до того как считаются все данные прошлого кадра (в данный момент от этой проблемы частично избавились увеличив буфер памяти). Это не позволяет использовать матрицу в процессе авто-фокуса и потоковой видеозаписи, потому данные матрицы постепенно вытесняются технологией CMOS (КМОП), матрицы которых могут производить видеозапись и авто фокусировку посредством самой матрицы.
Плюсами CCD матриц над CMOS являются:
- · Меньше шумность изображения на пиксель.
- · Нет искажений цвета в жёлтые тона, больше натурализма в зелёных тонах.
- · Проще в производстве, но дороже.
- · Не греются при долгой съёмке и следовательно создают меньше шумов.

- · У технологии CCD, сама матрица имеет больший (полный) размер для съёмки, в отличии от технологии CMOS, где светочувствительна лишь её часть, поэтому света попадает больше. Соответственно CCD более светочувствительна, чем матрицы CMOS.
Минусы CCD матриц:
- · Потребление энергии больше.
- · Невозможность потоковым методом снимать кадр за кадром (в данное время уже возможно).
- · Некоторые ограничения в будущем, при создании матриц с высокими разрешениями.
- · Требуется больше места для размещения матрицы, фотоаппараты обычно имеют несколько большие габариты, но не всегда.
Вообще, для зеркальных фотоаппаратов с CMOS матрицами принципиально не нужен затвор. Он выполняет скорее дополняющую функцию, чем чисто функциональную.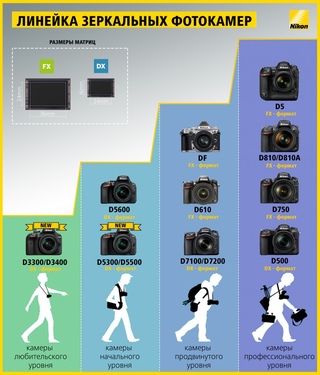 Потому многие любительские зеркальные фотоаппараты, всё больше приближаются к обычным цифровым «мыльницам», что немного портит качество снимков, но уменьшает цену готового изделия.
Потому многие любительские зеркальные фотоаппараты, всё больше приближаются к обычным цифровым «мыльницам», что немного портит качество снимков, но уменьшает цену готового изделия.
Постепенно, CCD матрицы вытесняются более дешёвыми CMOS матрицами. Правда, происходит это пока только в любительских и полупрофессиональных линейках зеркальных фотоаппаратов. Позиции CCD на поприще профессиональных зеркальных фотокамер всё также сильны.
Сравнение цветов CCD и CMOS матриц Pentaxist.ru
Вы здесь: На главную » ccd vs cmos » Сравнение цветов CCD и CMOS матриц
Прошло почти 10 лет с момента появления первой цифровой зеркалки *ist D и с тех пор разрешение матрицы выросло с 6 до 16 Мегапикселей, однако по-прежнему форм-фактор матриц не изменился, они так остались APS-C (кроп 1,5). Конечно, уровень шума у CMOS-матриц ниже и они способны снимать видео. Как изменилось качество картинки с увеличением разрешения? Что же мы приобрели и что потеряли?
Конечно, уровень шума у CMOS-матриц ниже и они способны снимать видео. Как изменилось качество картинки с увеличением разрешения? Что же мы приобрели и что потеряли?
Было решено сравнить цветопередачу старого *ist DL 2 на CCD матрице и «новой» K-5 на CMOS-матрице от Sony, которая по-прежнему используется в новых зеркальных камерах Pentax.
Условия тестирования
На обеих камерах установлена съемка в RAW, ручной баланс белого к дневному свету и ISO 200, одет объектив DA 21 f/3.2. Съемка велась в режиме приоритета диафрагмы (Av) и сняты одни и те же сцены.
Пользовательский режим изображения установлен на «Natural» со всеми настройками по умолчанию, кроме резкости, ползунок которой установлен на уровне +1. Фотографии с *IST DL2 и К-5 конвертированы из RAW в 6 Мпикс. джипеги без каких-либо корректировок (с помощью настроек камеры) оригинальным RAW-конвертером PENTAX Utility (Laboratory) версии 4.3.
Результаты
Слева *ist DL 2 (CCD), справа K5 (CMOS)
По ощущениям фото с *ist DL2 более естественные.
 Сцены выглядят реальными как мы видим их глазами в отличии от изображений сделанных на K-5! С K-5 изображения «белее» чем с DL2, несмотря на то что баланс белого был установлен к дневному свету ручной настройкой.
Сцены выглядят реальными как мы видим их глазами в отличии от изображений сделанных на K-5! С K-5 изображения «белее» чем с DL2, несмотря на то что баланс белого был установлен к дневному свету ручной настройкой.
Если вы посмотрите на листву деревьев, то увидите что их зеленый цвет выглядит неправдоподобно и фальшиво. То же самое касается и коричневых стволов деревьев. Так же как и цветок, который красно-оранжевый, а не просто красный как его воспроизвел К-5.
Кроме того, к большому удивлению, динамический диапазон DL 2 шире чем у К-5, несмотря на то, что оценки DxO показывают выше у К-5. Просто сравните проработку теней на кадрах с DL2 и K-5…
Оцените материал!
Матрицы фотоаппаратов(29 фото): таблица размеров, сравнение типов. Как проверить битые пиксели? Что это?
Покупателям фототехники обязательно нужно знать о матрице фотоаппарата все. Большое значение имеют как разрешение, так и уровень светочувствительности этого устройства. Также стоит обратить внимание на марку, производящую такие детали.
Также стоит обратить внимание на марку, производящую такие детали.
Что это такое?
Матрица камеры — это примерно то же самое, что сердце или мозг для живого организма, что двигатель для автомобиля или крыша в доме.Если он не работает или работает плохо, состояние всех остальных частей камеры не имеет значения. Для справки: в ряде источников также используется термин «датчик» или «датчик» . Если не указано, что это за «датчик», то имеется в виду матрица.
Это очень сложно, потому что представляет собой микросхему, образованную фотодиодами . Интенсивность светового потока определяет интенсивность генерируемого электрического сигнала. Собственно, для его развития матрица и нужна.Когда он выходит из строя, как уже понятно, любая камера представляет собой бесполезный кусок металла, пластика и стекла. Преобразование импульса в цифровой сигнал осуществляется с помощью специального устройства; он либо встроен в матрицу, либо расположен отдельно.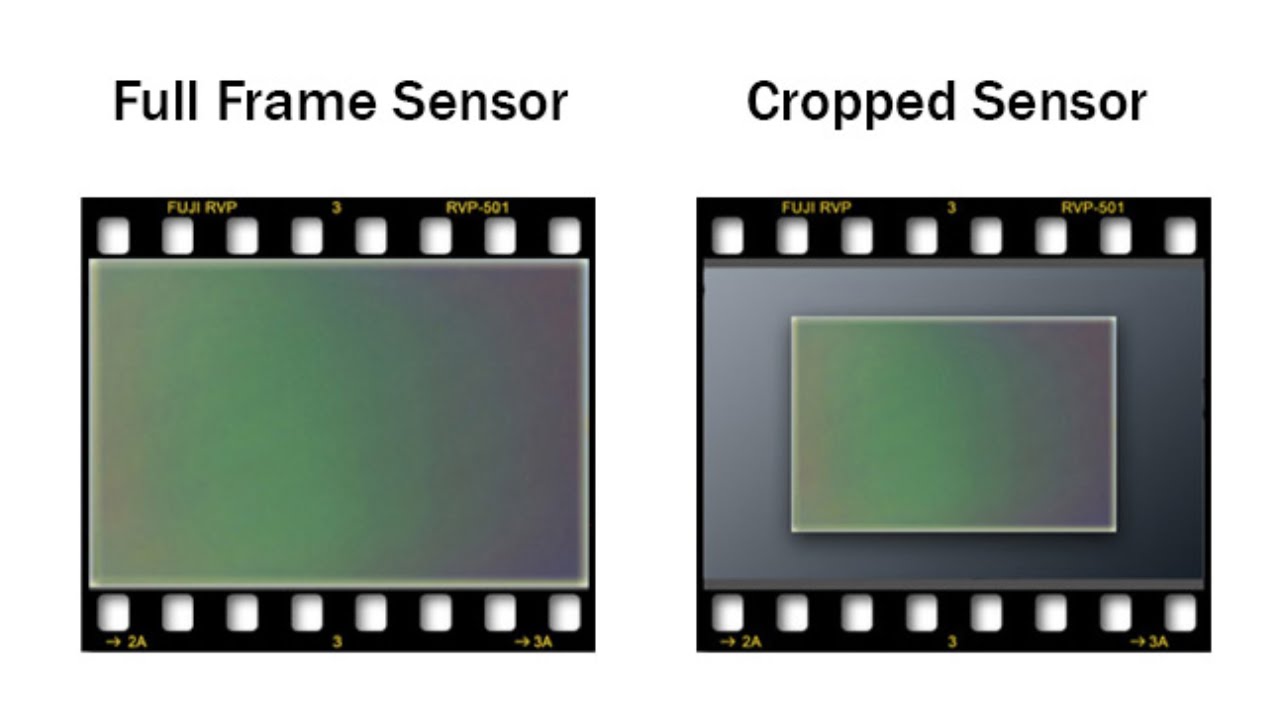
Light преобразуется в биты по специальному протоколу. На каждый светодиод приходится один пиксель изображения. Добиться цветного изображения основной части матрицы «помогают» специальные фильтры. С точки зрения оптики матрица является точным аналогом пленки, используемой в старых фотоаппаратах.Различаются только внутренние физические процессы, никаких химических изменений нет, и работа со светом полностью идентична.
Основным параметром датчика является так называемая характеристическая кривая, которая напрямую связана с фотографической широтой . Эта линия проводится между крайними точками правильной экспозиции. Когда вы выйдете за эти пределы, кривая на графике изогнется. На снимках это проявляется в значительном падении контрастности. В цифровой фотографии дополнительные ограничения накладываются свойствами аналого-цифровых преобразователей.
ИзображениеОбзор типов
При поверхностном знакомстве с рынком фототехники нетрудно заметить, что она оснащена различными типами матриц..jpg)
По технологии чтения
CCD — обычно CCD в русскоязычных источниках — означает последовательное чтение. Очевидно, в связи с этим существует серьезное ограничение скорости фотографирования. Вам обязательно придется подождать некоторое время, пока формируется предыдущая фотография. Характеристики CMOS (CMOS) в этом плане лучше, такие матрицы привлекательнее при использовании автофокуса .
Именно КМОП пытаются использовать для замера экспозиции . Но даже самые обычные фотографы склонны покупать именно модели на основе CMOS. Помимо лучшего качества изображения, они отличаются относительной дешевизной и меньшим временем автономной работы при фотографировании. Иногда встречаются матрицы из трех слоев, чаще всего каждый из них выполнен по технологии CCD.Торговое обозначение — 3CCD; оборудование с такой начинкой предназначено для профессиональных съемок.
ImageImage В устройствах Panasonic используется технология Live-MOS.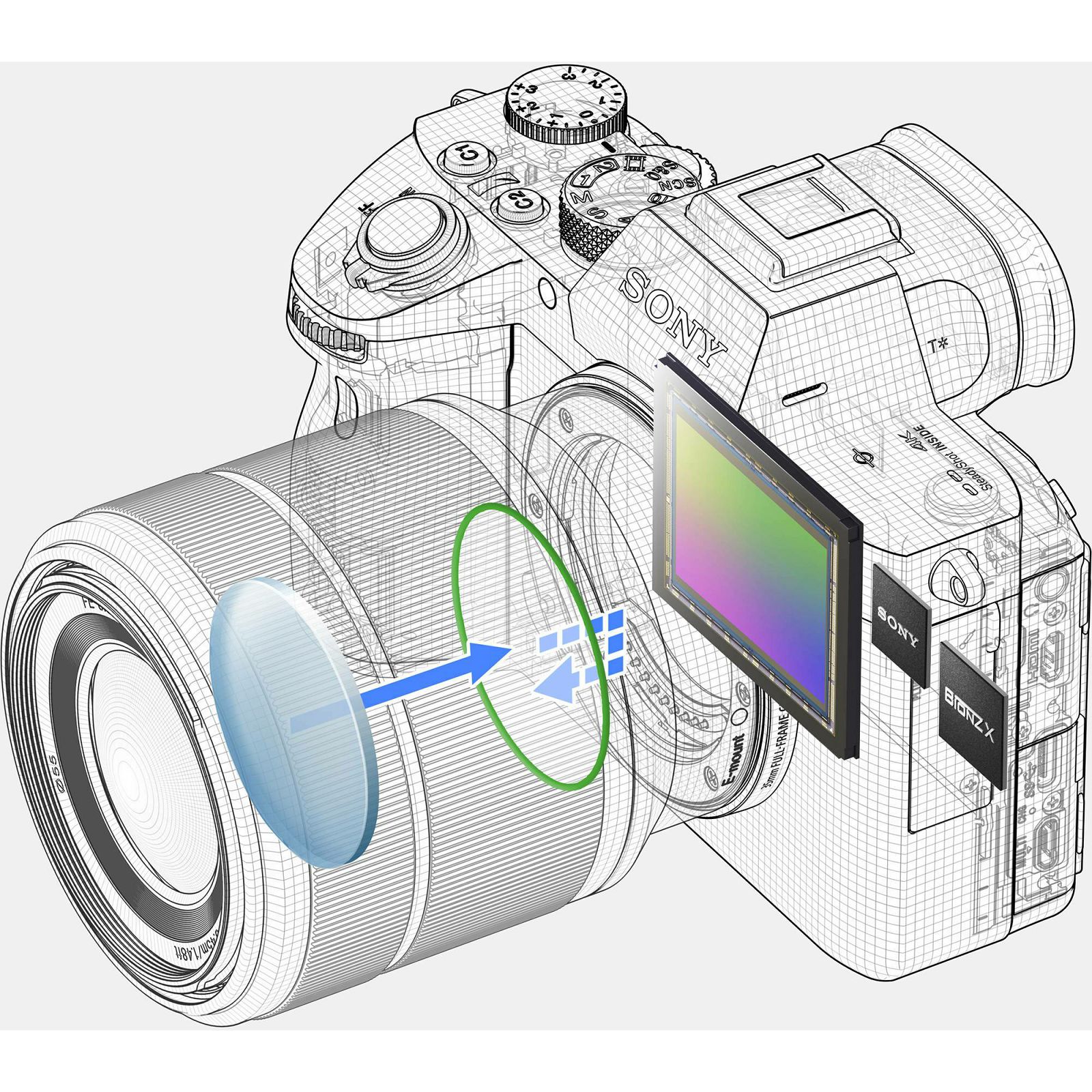 Этот метод отличается от традиционной технологии MOS тем, что на пиксель приходится меньше соединений. Это помогает снизить стресс. Такое конструктивное решение в сочетании с упрощенной передачей регистров и сигналов управления гарантирует получение «живых» кадров. При этом устраняется перегрев и повышенный уровень шума.
Этот метод отличается от традиционной технологии MOS тем, что на пиксель приходится меньше соединений. Это помогает снизить стресс. Такое конструктивное решение в сочетании с упрощенной передачей регистров и сигналов управления гарантирует получение «живых» кадров. При этом устраняется перегрев и повышенный уровень шума.
Fujifilm использует матрицу особого типа . Они называются Super CCD. Большие зеленые пиксели предназначены для съемки при слабом освещении. Маленькие зеленые пиксели неотличимы от синих и красных точек.
Изображение ИзображениеИзображениеДанное конструктивное решение позволило увеличить фотографическую ширину матрицы.
В зависимости от фильтра
Но сравнение матриц возможно и по типу используемого фильтра. Дихроичные призмы используются в трехматричных системах.Внутри таких призм световой луч будет разделен на 3 основных цвета. Затем зеленый, красный и синий потоки направляются в соответствующие матрицы. Особенности:
Особенности:
- оптимальная передача цветового перехода;
- исчезновение цветного муара;
- снижение уровня шума;
- увеличенное разрешение;
- возможность цветокоррекции перед матричной обработкой, а не только после нее;
- увеличенных размеров;
- несовместимость с линзами с малым межфланцевым расстоянием;
- трудность совмещения цветов, которая достигается только при очень тщательном совмещении.
Другой вариант — массив мозаичных фильтров . Название говорит само за себя: пиксели расположены в одной плоскости, и каждый находится под «своим» светофильтром. Если информации о цветах недостаточно, на помощь приходят алгоритмы цифровой интерполяции. Повышение светочувствительности достигается за счет ухудшения цветопередачи и наоборот. Ранее использовалась опция RGGB.
ImageImageА также известные схемы:
Также есть технология получения матриц с полноцветными точками кадра. Метод, разработанный Foveon, предполагает размещение детекторов света в три слоя. Nikon пошел другим путем. В ее разработке три основных луча обрабатываются с помощью микролинзы и трех фотодиодов, а затем с каждого пикселя поступают на дихроичные зеркала. Эти зеркала уже перенаправляют световой поток на детекторы; Несмотря на внутреннюю сложность, привлекательно обойтись без сложной настройки.
Метод, разработанный Foveon, предполагает размещение детекторов света в три слоя. Nikon пошел другим путем. В ее разработке три основных луча обрабатываются с помощью микролинзы и трех фотодиодов, а затем с каждого пикселя поступают на дихроичные зеркала. Эти зеркала уже перенаправляют световой поток на детекторы; Несмотря на внутреннюю сложность, привлекательно обойтись без сложной настройки.
Размеры (редактировать)
Основные размеры матриц камер приведены в таблице (на примере популярных моделей).
| Имя | Тип | Индикатор кмоп | Пиксель, мкм | Размер матрицы, см |
|---|---|---|---|---|
| Kodak 1D | Ccd | 1, 3 | 11, 6 | 2, 87×1, 91 |
|
Canon 1Ds Mark II |
КМОП | 1 | 7, 2 | 3, 6×2, 4 |
|
Canon EOS 1D Mark IV |
КМОП | 1, 3 | 5, 7 | 2, 79×1, 86 |
| Никон D2H | JFET | 1, 5 | 9, 6 | 2, 37×1, 55 |
|
Sony А 100/200/230/300/330 |
Ccd | 1, 5 | 6, 1 | 2, 36×1, 58 |
| Olympus E-M5 | NMOS | 2 | 3, 7 | 1, 73×1, 3 |
Не путайте физический формат матрицы с ее оптическим разрешением. Вполне могут быть как большие датчики с относительно невысокой четкостью, так и очень качественные малогабаритные датчики света. Но В целом закономерность прослеживается: большая матрица чаще всего ассоциируется как с высокой чувствительностью, так и с хорошей детализацией изображения . Просто потому, что при таком условии это легче реализовать.
Вполне могут быть как большие датчики с относительно невысокой четкостью, так и очень качественные малогабаритные датчики света. Но В целом закономерность прослеживается: большая матрица чаще всего ассоциируется как с высокой чувствительностью, так и с хорошей детализацией изображения . Просто потому, что при таком условии это легче реализовать.
Но нужно понимать, что размер матрицы полностью влияет на размер и вес камеры . Ведь от этой составляющей зависит размер оптической системы камеры в целом.Но линейные размеры матриц напрямую связаны с цифровым шумом. Если размер светоприемника увеличивается, общий объем полезной оптической информации увеличивается. Умеет осветлить изображение и насытить его естественными тонами.
Image В недорогих камерах обычно используются датчики размером около 2/3 дюйма . Но датчики размером 1 дюйм используются в основном в полнокадровых камерах. Однако в последние годы снижение стоимости производство больших световых датчиков несколько изменило эту картину. Однако важно учитывать также роль размера пикселя. Чем они больше, тем толще изоляция делительных цепей и тем ниже ток утечки.
Однако важно учитывать также роль размера пикселя. Чем они больше, тем толще изоляция делительных цепей и тем ниже ток утечки.
Количество мегапикселей и разрешение
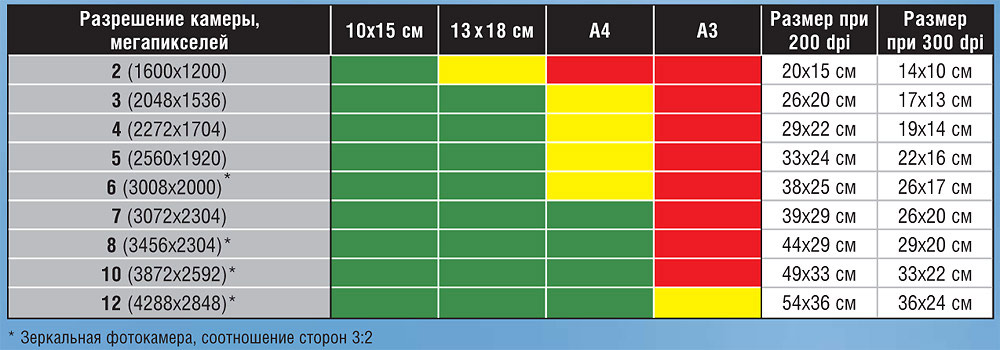
Эти параметры обязательно появятся как в рекламе, так и в описаниях на ценниках. Разрешение особенно важно, когда вы планируете печатать снимки на бумаге или просматривать их на телевизоре, на больших компьютерных мониторах . А вот для фотографий размером 10х15 см можно обойтись 3 Мп.А самые продвинутые телевизоры по-прежнему не показывают больше 2 миллионов пикселей. Поэтому оценить достоинства изображений с высоким разрешением не получится, это скорее маркетинговый трюк.
Где , чем больше пикселей заявлено, тем больше должна быть матрица . Несоответствие этих параметров неизбежно вызовет шум на изображениях. К тому же они неизбежно будут урезаны по ширине.
ИзображениеВнимание: стоит учитывать разрешение не только самой матрицы, но и объектива.Об этом часто забывают, и тогда получаются очень странные результаты.
Параметры светочувствительности
Эти свойства важны при съемке в условиях низкой освещенности. Чем более чувствительна матрица, тем четче будут снимки. Манипулируя ISO, они влияют на яркость кадра без перенастройки диафрагмы и выдержки. Суть в том, что они усиливают электрический ток, а не повышают чувствительность фотоэлементов. Проблема — при использовании большого зума также увеличиваются шумы.
Повышение значения ISO имеет смысл только в тех случаях, когда:
- фон недостаточно освещен;
- нельзя использовать вспышку;
- надо снять с рук.
Принято считать, что:
- ISO при 100-200 достаточно для наружной съемки при приличном освещении;
- ISO 400-800 достаточно для помещений с искусственным освещением;
- ISO 800–1600 необходим для ночной фотосъемки;
- номеров больше 1600 необходимы только для фотосъемки на концертах и подобных мероприятиях.
Лучшие производители
Рейтинг производителей фотоматриц очень лаконичен. Список фирм, которые этим занимаются, обычно невелик. Даже такая компания, как , Nikon , хотя сама матрица разрабатывает, собственно производство передается другим организациям. Часто заказы передаются Sony … А также руководство компании утверждает, что делает заказы от Fujitsu .
Sony — один из крупнейших мировых производителей фотодатчиков.Под этим брендом они также оборудуют собственные камеры. Лишь Canon опережает его по выпуску матриц (только для собственных нужд). Также стоит отметить товары:
- Samsung;
- Panasonic;
- Kodak;
- E2V;
- Aptina;
- Sigma;
- Foveon.
Как проверить битые пиксели?
Как бы ни старались производители, пыль и прочие факторы, просто повседневное использование неизбежно скажется на характеристиках матриц.Их нужно проверять на битые и горячие пиксели. Эта проверка зеркальной камеры выполняется следующим образом:
- выключить шумоподавление;
- чувствительность матрицы установлена на минимум или близкое к нему значение;
- установить ручной режим экспозиции;
- выключить автофокус.
Важно: ни один пункт не может быть пропущен. В противном случае получить какое-либо точное представление о свойствах матрицы не удастся. Сам тест состоит из фотографирования без снятия крышки объектива.Выдержка должна составлять 3 кадра 1/3, 1/60 и 3 секунды каждый. Далее захваченное изображение просматривается в максимально возможном разрешении, лучше всего — увеличивая его на экране компьютера.
На снимке с выдержкой 1/3 секунды не должно быть цветных или серых точек. Обнаружив хотя бы несколько таких включений, необходимо ознакомиться с кадром, снятым на выдержке 1/60 . Если подозрительных точек нет или их значительно меньше, можно считать, что первый этап оценки был успешный.При самой длинной выдержке даже полнофункциональная матрица неизбежно покажет 5-6 цветных точек. Это неизбежные физические процессы, и они никоим образом не ухудшат картину.
Цветные точки могут появляться при высокой чувствительности . Это также то, как появляются горячие пиксели. Но компенсируется это очень легко — достаточно включить шумоподавитель. Многочисленные точки, видимые при средних выдержках и низких значениях ISO, являются проблемой. Когда их больше 5, следует отложить камеру и начать проверку другой камеры, иначе деньги будут выброшены на ветер.
Различие и связь гомографической матрицы и фундаментальной матрицы и существенной матрицы
Перепечатанный источник:
1. Перекрестное произведение
2. Бинокль
3. Эпиполярная геометрия
Определение эпиполярной геометрии: это внутренняя проективная геометрия между двумя видами, которая связана только с внутренними параметрами и относительной позой камеры и не имеет ничего общего со структурой сцены.
Базовая линия: линия, соединяющая оптические центры двух камер.
Суть эпиполярной геометрии двух представлений: описать геометрические отношения между плоскостью изображения и плоскостью (плоскость с базовой линией в качестве оси вращения).
Цель (эпиполярное ограничение): при бинокулярном сопоставлении, учитывая точку на левом изображении, нет необходимости искать соответствующую точку на всем правом изображении. «Полярные ограничения» сокращают пространство поиска до одной строки.
Эпиполь: пересечение базовой линии и плоскости изображения. То есть полюс на левом изображении: это положение, в котором левая камера видит правую камеру; Полюс на правом изображении: это положение, в котором правая камера видит левую камеру.
EpipolarPlane: плоскость, содержащая базовую линию
.Эпиполярная линия: линия пересечения между эпиполярной плоскостью и плоскостью изображения. Все эпиполярные линии пересекаются на полюсах, и существует взаимно однозначное соответствие между эпиполярными линиями на одной и той же паре полюсов.
4. Основная система координат матрица-камера
Существенная матрица — это основная матрица с нормализованными координатами изображения. Не только обладает всеми свойствами базовой матрицы, но также может оценивать взаимное расположение двух камер. Для получения подробной информации, пожалуйста, обратитесь к «Многовидовая геометрия в компьютерном зрении».
Как основная матрица, так и основная матрица представляют собой матрицы 3×3 и кодируют эпиполярную геометрию двух видов.
С точки зрения времени, существенная матрица вводится перед фундаментальной матрицей. Базовая матрица — это расширение существенной матрицы. По сравнению с базовой матрицей основная матрица имеет:
1) Меньше степеней свободы
2) Дополнительные функции
4.1 Роль существенной матрицы
1) Дана точка на изображении, умноженная на существенную матрицу или фундаментальную матрицу, в результате получается эпиполярная линия этой точки на другом изображении.При сопоставлении диапазон поиска может быть значительно сокращен.
2) Может использоваться для поиска R и T
4.2 Процесс деривации
Вывод выполняется в условиях эпиполярного ограничения.
R: вращение T: перенос
4.3 Основные характеристики матрицы
-
rank (E) = 2 (ранг существенной матрицы равен 2, что очень важно)
-
Существенная матрица зависит только от внешних параметров (Внешние параметры) (R&T), которые необходимо определить.
-
Использовать систему координат камеры (Camera)
4.4 Уравнение Лонге-Хиггинса
Pr и pl на рисунке выше являются системой координат камеры.
4.5 Краткое изложение существенной матрицы
5. Фундаментальная матрично-пиксельная система координат
Предпосылка: положение оптического центра левого и правого изображений различается.
5.1 Процесс деривации
Основная матрица использует систему координат камеры, которую можно описать с помощью R&T камеры.
Чтобы использовать координаты изображения, необходимо учитывать внутренние параметры камеры (внутренние параметры)
5.2 Характеристики базовой матрицы
-
rank (F) = 2 (ранг базовой матрицы равен 2, что очень важно)
-
Базовая матрица зависит от внутренних и внешних параметров (внутренних и внешних параметров) (f, R & T), которые необходимо определить.
-
Использовать пиксельную систему координат
-
F — это базовая матрица от левого изображения к правому изображению.Из формулы видно, что основная матрица имеет направление. Основная матрица от правого изображения к левому изображению — это транспонирование F
-
Матрица F представляет собой матрицу 3 с 7 степенями свободы Матрица 3 (3 3 Сама матрица имеет 9 степеней свободы, поскольку разница между постоянным множителем и определяющим значением равна 0, вычесть 2 степени свободы ), разница в постоянном множителе означает: kF (k! = 0) также является базовой матрицей, то есть, если F является фундаментальной матрицей, то kF также является фундаментальной матрицей, поэтому фундаментальная матрица не уникален, он уникален при условии, что он отличается на несколько, то есть мы можем зафиксировать значение некоторого ненулевого элемента в матрице, который, естественно, меньше одной степени свободы.
-
Таблица атрибутов
5.3 Роль фундаментальной матрицы
- Подобно основной матрице, основная матрица также сообщает нам, как пиксели одного изображения связаны с эпиполярными линиями другого изображения.
(Пиксельная система координат: пиксель -> полярная линия) - Трехмерная реконструкция и сопоставление признаков
- Базовая матрица не зависит от структуры сцены
- Его можно рассчитать по соответствующему соотношению точек сцены на изображении без необходимости расчета внутренних и внешних параметров камеры.
- Напротив, вы можете сначала найти F, а затем найти внешние параметры камеры (R, T) в соответствии с F
5.4 Сравнение существенной матрицы и фундаментальной матрицы
5,5 Другое (от MVG)
- Матрица гомографии
5.1 Проективные преобразования
2D проективная геометрия — это исследование свойств проективной плоскости IP2, которые инвариантны относительно группы преобразований, известных как проективности.
Проективность также называется коллинеацией (полезное название), проективным преобразованием или гомографией: термины синонимичны.
Матрица гомографии на самом деле представляет собой матрицу перспективного преобразования, чистое двухмерное преобразование, которое, как я знаю, используется в BA только как условие ограничения.
6. Аффинные преобразования
7. Преобразования подобия
- Матрица камеры
Сравнение воздействия различных камер и разрешения изображения для распознавания кодов матрицы данных
[1] L.Каррах и Э. Пиварчёва, «Расположение кода матрицы данных, отмеченное лазером на поверхности металлических инструментов», Acta facultatis technicae vol. 22, no, 2, 2017, pp. 29–38. Поиск в Google Scholar
[2] Л. Каррах и Э. Пиварчёва, «Анализ различных методов определения местоположения изображений с матричными кодами», Elektro 2018: 12-я Международная конференция Микулов, 2018. Поиск в Google Scholar
[3] Q. Huang. З-С. Чен, X-Y. Хуанг и И-И Чжу, «Расположение кода матрицы данных на основе обнаружения паттернов искателя и», «Математические проблемы в инженерии», 2012 г.Искать в Google Scholar
[4] JB Burns, R. Hansona и M. Risemane, «Выделение прямых линий», IEEE Transactions on Pattern Analysis and Machine Intelligence 1986. Поиск в Google Scholar
[5] RG von Gioi, J Якубович, Дж. М. Морель и Г. Рэндалл, «LSD: детектор быстрого сегмента с контролем ложного обнаружения», IEEE Transactions on Pattern Analysis and Machine Intelligence 2010. Поиск в Google Scholar
[6] H. Donghong, T. Хуэй и К. Синьмэн, «Преобразование радона, применяемое к распознаванию изображения двумерного штрих-кода», Журнал Уханьского университета, 2005 г.Поиск в Google Scholar
[7] Z. Chenguang, Y. Na и H. Rukun, «Исследование технологии двумерной идентификации штрих-кода на основе преобразования Хафа», журнал Чанчуньского педагогического университета, 2007 г. Поиск в Google Scholar
[8 ] Дженг-Ан, Лин и Чиу-Шанн Фух, «Декодирование изображения 2D-штрих-кода», «Математические проблемы в инженерии», 2013 г. Поиск в Google Scholar
[9] П. Гаур и С. Тивари, «Распознавание изображений 2D-штрих-кода с помощью Edge Обнаружение и морфологические операции », Международный журнал компьютерных наук и мобильных вычислений, 2014 г.Поиск в Google Scholar
[10] С. Ли, Дж. Шан, З. Дуан и Дж. Хуанг, «Метод быстрого обнаружения кода быстрого ответа на основе кодирования длины серий», IET Image Processing vol. 12, вып. 4, 2018, pp. 546–551.Поиск в Google Scholar
[11] Д.К. Хансен и К. Насроллахи, «Обнаружение и классификация штрих-кодов в реальном времени с использованием глубокого обучения», 9-я Международная совместная конференция по вычислительному интеллекту, 2017 г. Поиск в Google Scholar
[12] Д. Брэдли и Дж. Рот, «Адаптивная пороговая обработка с использованием интегрального изображения», Journal of Graphics Tools 2007.Поиск в Google Scholar
[13] В. Ниблак, «Введение в обработку цифровых изображений», 1986. Поиск в Google Scholar
[14] Дж. Совола и М. Пиетикайнен, «Адаптивная бинаризация изображения документа», Распознавание образов т. 33, 2000, pp. 225–236. Поиск в Google Scholar
[15] А. Розенфельд и Дж. Пфальц, «Последовательная обработка цифровых изображений», J. ACM 1966, стр. 471–494. Поиск в Google Scholar
[16] М. Лотон, «Программное обеспечение с открытым исходным кодом для чтения и записи штрих-кодов матрицы данных» 2011 г.,
[17] Google, «ZXing» («Zebra Crossing») Библиотека сканирования штрих-кода для Java Android »,
[18] На Barcode, URL-адрес «NET Barcode Reader Component»: http://www.onbarcode.com/products/net barcode reader, по состоянию на 12 апреля 2018 г. Поиск в Google Scholar
[ 19] «Dynamsoft, SDK для считывателя штрих-кода», URL: https://www.dynamsoft.com/Products/Dynamic-Barcode-Reader.aspx, доступ 12 апреля 2018 г. Поиск в Google Scholar
[20] Leadtools, «Data Matrix SDK», URL: https://www.leadtools.com/sdk/barcode/2d-datamatrix, доступ 12 апреля 2018 г. .Поиск в Google Scholar
[21] Inlite Research Inc. «Barcode Reader SDK», URL: https://online-barcode-reader.inliteresearch.com, по состоянию на 12 апреля 2018 г. Поиск в Google Scholar
[22 ] Ю. Турыгин, П. Божек, Ю. Никитин, Е. Соснович и А. Абрамов, «Повышение надежности процесса управления мобильными роботами с помощью обратной проверки», Международный журнал передовых робототехнических систем, том.13, вып. 6, 2016, стр. 1–8. Поиск в Google Scholar
[23] П. Божек, «Оптимизация пути робота для приложений точечной сварки в автомобильной промышленности», Tehnicki Vjesnik — Technical Gazette vol. 20, нет. 5, 2013, pp. 913–917. Поиск в Google Scholar
[24] Д. Бродич, «Сегментация текстовых строк с алгоритмом потока воды, основанным на функции мощности», Journal of Electrical Engineering vol. 66, нет. 3, 2015, стр. 132–141. Поиск в Google Scholar
[25] Д. Бродич и З. Н. Миливоевич, «Сегментация текстовых строк с помощью алгоритма, основанного на ориентированном анизотропном гауссовском ядре», Journal of Electrical Engineering, vol.64, нет. 4, 2013, стр. 238–24. Поиск в Google Scholar
| 3fr | Формат изображения необработанного цифрового фотоаппарата Hasselblad. |
| ARW | Формат изображения Sony Digital Camera Raw для устройств Alpha. |
| отсек | Формат файлов Casio Digital Camera Raw. |
| БМК | Файл необработанного изображения NuCore. |
| колпачок | Формат необработанного изображения цифровой камеры Phase One. |
| кино | Файл необработанного изображения Phantom Software. |
| cr2 | Цифровая камера Canon в формате RAW, версия 2.0. Эти изображения основаны на стандарте изображений TIFF. |
| cr3 | Цифровая камера Canon в формате RAW, версия 3.0. Эти изображения основаны на стандарте изображений TIFF. |
| crw | Цифровая камера Canon в формате RAW, версия 1.0. |
| CS1 | Файл необработанного изображения Capture Shop. |
| DC2 | Файл цифровой камеры Kodak DC25. |
| DCR | Формат изображения Kodak Digital Camera Raw для этих моделей: Kodak DSC Pro SLR / c, Kodak DSC Pro SLR / n, Kodak DSC Pro 14N, Kodak DSC PRO 14nx. |
| ДРФ | Формат необработанного изображения цифровой камеры Kodak |
| dsc | Формат изображения необработанного цифрового фотоаппарата Kodak. |
| днг | Adobe Digital Negative: DNG — это общедоступный архивный формат для файлов RAW, созданных цифровыми камерами. Устраняя отсутствие открытого стандарта для необработанных файлов, создаваемых отдельными моделями камер, DNG помогает обеспечить фотографам возможность доступа к своим файлам в будущем. |
| эрф | Формат изображения Epson Digital Camera Raw. |
| fff | Imacon Digital Camera Raw Image Format. |
| HDR | Файл необработанного изображения Leaf. |
| ia | Файл необработанного изображения Sinar. |
| iiq | Формат необработанного изображения цифровой камеры Phase One. |
| kc2 | Формат необработанного изображения цифровой камеры Kodak DCS200. |
| к25 | Формат изображения необработанного цифрового фотоаппарата Kodak DC25. |
| кдк | Формат изображения необработанного цифрового фотоаппарата Kodak. |
| мкр | Minolta RD175 Цифровая камера в формате RAW. |
| меф | Mamiya Digital Camera RAW Формат изображения. |
| мос | Формат изображения Mamiya Digital Camera Raw. |
| MRW | Формат необработанного изображения цифровой камеры Minolta Dimage. |
| неф | Формат изображения необработанного цифрового фотоаппарата Nikon. |
| № | Формат изображения необработанного цифрового фотоаппарата Nikon. |
| или | Формат необработанного изображения цифровой камеры Olympus. |
| pef | Формат изображения Pentax Digital Camera Raw. |
| ptx | Формат изображения Pentax Digital Camera Raw. |
| pxn | Формат изображения Logitech Digital Camera Raw. |
| кварт | Формат изображения Apple Quicktake 100/150 Digital Camera Raw. |
| раф | Формат изображения Fuji Digital Camera Raw. |
| сырой | Формат изображения цифровой камеры Panasonic. |
| rdc | Файл необработанного изображения Digital Foto Maker. |
| rw2 | Формат изображения необработанного цифрового фотоаппарата Panasonic LX3. |
| rw1 | Формат изображения Leica Camera Raw. |
| RWZ | Rawzor Формат изображения цифровой камеры Raw. |
| SR2 | Формат изображения Sony Digital Camera Raw. |
| SRF | Формат изображения Sony Digital Camera Raw для 8-мегапиксельной цифровой камеры DSC-F828 или Sony DSC-R1 |
| srw | Формат изображения Samsung Raw. |
| sti | Файл необработанного изображения Sinar Capture Shop. |
Оценочный (матричный) замер и точечный замер: сравнение
Понимание системы замера в камере может помочь вам очень быстро получить правильную экспозицию. Двумя наиболее распространенными типами систем замера являются — Evaluative (Canon) / Matrix (Nikon), которая является системой замера по умолчанию, и Spot Metering .
Когда вы делаете снимок, камера учитывает экспозицию для определенной части (частей) кадра.В системе замера по умолчанию (оценочный / матричный) камера дает вес всем элементам в кадре. Попробуем разобраться в этом на примере. Давайте посмотрим на изображение ниже:
Я снимаю манекен на ярком фоне. Для этого снимка моя камера настроена на режим замера по умолчанию, который в Canon называется оценочным режимом замера, как показано на изображении ниже:
В этом режиме камера определяет экспозицию, уделяя внимание всем элементам в кадре.Так как он в основном замечает более яркие элементы (потому что фон занимает больше места, чем объект), его обманывают, заставляя думать, что это очень яркая сцена, и, следовательно, уменьшает среднюю экспозицию изображения. В результате получается недоэкспонированный объект (манекен).
Чтобы исправить это, я могу переключить режим замера на Точечный замер, как показано на изображении ниже:
При точечном замере камера определяет экспозицию изображения, уделяя больше внимания той части, где находится ваша точка фокусировки.Давайте сделаем еще один снимок манекена на ярком фоне, чтобы понять это. Вот как выглядит снимок в режиме точечного замера:
Вы можете видеть, что на этот раз манекен экспонируется намного лучше. Это потому, что когда я сделал этот снимок, точка фокусировки находилась на глазу манекена. Поскольку мы были в режиме точечного замера, камера игнорировала яркий фон и уделяла внимание только объекту. Он заметил, что на объект попадает недостаточно света, и, следовательно, увеличила экспозицию.
Давайте посмотрим на обратный сценарий, когда объект находится на темном фоне, как показано на изображении ниже:
Для этого снимка я снова использовал оценочный замер. Поскольку многие части кадра темные (включая волосы манекена), камеру обманывают, заставляя думать, что для этого снимка требуется большая выдержка, и, следовательно, увеличивается средняя экспозиция этого изображения. На этот раз получился очень яркий объект.
Давайте посмотрим, что произойдет, когда мы перейдем на точечный замер.Вот результат:
Вы можете видеть, что на этот раз камера придала значение только лицу манекена (где была размещена точка фокусировки). Теперь на лицо уже падало достаточное количество естественного света, и, кроме того, кожа манекена очень светлая. Поскольку камера рассматривает только части вокруг лица, ее обманывают, заставляя думать, что все очень ярко, и поэтому уменьшается экспозиция кадра. Это дает лучшую экспозицию для нашего объекта, но фон, который уже был темным, становится еще темнее.
Рассмотрим еще несколько примеров:
Вот снимок телефона, который я сделал на борту парома:
Для этого снимка режим экспозамера моей телефонной камеры установлен на оценочный, поэтому при определении экспозиции он дает равный вес всем элементам в кадре.
Поскольку небо на заднем плане очень яркое, экспозиция уменьшается. Но поскольку внутренняя часть парома более темная, это тоже придает большое значение и увеличивает экспозицию.Поскольку светлые и темные части в кадре почти одинакового размера, результирующее изображение будет на 50% ярким и на 50% темным. Так что на самом деле никакая часть не «выигрывает». Вы получаете приличную экспозицию для обеих частей, но вы все равно можете видеть, что мы не можем должным образом видеть детали в небе, и мы также не можем видеть детали во внутренних частях парома.
Теперь, чтобы исправить это, я перехожу на точечный замер. И я помещаю точку фокусировки камеры моего телефона где-нибудь внутри парома.Теперь посмотрим на результат:
Вы можете видеть, что это мгновенно привело к лучшему открытию внутренней части парома. Это потому, что внутри было темно, и поскольку я разместил точку фокусировки в этой части, камера была обманута, думая, что я нажимаю на что-то действительно темное, и поэтому увеличила экспозицию. Конечно, это означает, что внешняя часть, которая и так была яркой, полностью выдувается из-за передержки.
Если мне нужна внешняя часть, то все, что мне нужно сделать, это разместить точку фокусировки на окнах, а не внутри парома.В результате получится следующее изображение:
На этот раз мы получили отличную экспозицию для неба и других элементов за пределами парома. Вы можете видеть, что на этот раз мы можем видеть даже облака в небе, в отличие от изображения, полученного при оценочном замере. Это связано с тем, что камера установила экспозицию исключительно для неба, поскольку мы указывали именно туда.
Существует еще один тип системы замера, называемый центрально-взвешенным замером, который находится где-то между оценочной и точечной системами замера.В системе с центральным взвешиванием камера будет уделять внимание области около центра кадра, а не только конкретному месту, где находится точка фокусировки.
Итак, нет правильной или неправильной системы. Как видно из приведенных выше примеров, правильная система замера будет зависеть от того, что вы смотрите на кадре. Если важен только объект или одна часть изображения, то с большим эффектом можно использовать точечные или центрально-взвешенные системы замера.
Многие фотографы даже не беспокоятся о системах замера, потому что большинство из них можно исправить при постобработке.Например, если вы использовали оценочный замер и сделали снимок, на котором ваш объект был немного недоэкспонирован, это обычно не имеет большого значения, поскольку вы можете открыть изображение в Photoshop / Lightroom и немного приподнять тени, чтобы скорректировать экспозицию для объекта. .
Но если вы вообще не редактируете снимки и полагаетесь только на то, что снимаете с камеры, то выбор правильной системы замера может быть очень важным.
Другой выход — не менять систему замера, а использовать систему компенсации экспозиции, которая есть в большинстве фотоаппаратов.Поэтому, если вы получаете изображение с недоэкспонированным объектом, вы всегда можете установить положительное значение компенсации экспозиции, чтобы ваша камера увеличила экспозицию следующего снимка, который вы сделаете.
Но одно можно сказать наверняка. Вы не можете получить лучшее из обоих миров. В высококонтрастных ситуациях (когда какая-то часть очень яркая, а какая-то очень темная, как, например, снимок с переправы), динамический диапазон камеры обычно не настолько хорош, чтобы она могла одинаково хорошо запечатлеть обе части. Полнокадровые камеры имеют лучший динамический диапазон, но даже с ними вам потребуется брекетинг снимков, а затем смешивание различных экспозиций, чтобы получить лучшее из обоих миров.Этот метод называется фотографией HDR (расширенный динамический диапазон). Вы можете узнать больше о HDR-фотографии в нашей бесплатной электронной книге «Фотография для начинающих».
Понравилось то, что вы читаете? Затем выведите свое обучение на новый уровень, посетив наши онлайн-курсы по фотографии и видеосъемке. Нажмите на изображение ниже:
% PDF-1.5 % 24 0 объект >>> эндобдж 69 0 объект > поток конечный поток эндобдж 20 0 объект > эндобдж 25 0 объект > / ExtGState> / Font> / ProcSet [/ PDF / Text / ImageC] / XObject >>> / Rotate 0 / TrimBox [0.0 0,0 595,276 841,89] / Тип / Страница >> эндобдж 1 0 объект > / ExtGState> / Font> / ProcSet [/ PDF / Text / ImageC] / XObject >>> / Rotate 0 / TrimBox [0.0 0.0 595.276 841.89] / Type / Page >> эндобдж 10 0 obj > / ExtGState> / Font> / ProcSet [/ PDF / Text] / XObject >>> / Rotate 0 / TrimBox [0.0 0.0 595.276 841.89] / Type / Page >> эндобдж 11 0 объект > поток HWn7} cwx «; ڵ Ē nM LOϩSEΟg {80r \ u8; 痄 Q * Q9p ‘% Zsru {- $ K @ xr W NoGFtEw
Матричная математика для Интернета — Веб-API
Матрицы могут использоваться для представления преобразований объектов в космосе и используются для выполнение многих ключевых типов вычислений при построении изображений и визуализации данных в Интернете.В этой статье рассказывается, как создавать матрицы и как использовать их с преобразованиями CSS и типом преобразования matrix3d .
Хотя в этой статье для упрощения пояснений используется CSS, матрицы — это основная концепция, используемая многими различными технологиями, включая WebGL, API WebXR (VR и AR) и шейдеры GLSL. Эта статья также доступна в виде комплекта материалов MDN. В живых примерах используется набор служебных функций, доступных в глобальном объекте с именем MDN .
Существует много типов матриц, но нас интересуют матрицы трехмерного преобразования.Эти матрицы состоят из набора из 16 значений, расположенных в сетке 4×4. В JavaScript матрицу легко представить в виде массива.
Начнем с рассмотрения единичной матрицы . Это специальная матрица преобразования, которая работает так же, как число 1 при скалярном умножении; так же, как n * 1 = n, умножение любой матрицы на единичную матрицу дает результирующую матрицу, значения которой соответствуют исходной матрице.
Идентификационная матрица в JavaScript выглядит так:
пусть identityMatrix = [
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0,
0, 0, 0, 1
];
Как выглядит умножение на единичную матрицу? Самый простой пример — умножить одну точку на единичную матрицу.Поскольку для трехмерной точки требуются только три значения (x, y и z), а матрица преобразования представляет собой матрицу значений 4×4, нам нужно добавить к точке четвертое измерение. Условно это измерение называется перспективой и обозначается буквой w. Для типичного положения установка w на 1 сделает математические вычисления более эффективными.
После добавления компонента w к точке обратите внимание, как аккуратно выстраиваются матрица и точка:
[1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0,
0, 0, 0, 1]
[4, 3, 2, 1]
Компонент w имеет несколько дополнительных применений, которые выходят за рамки данной статьи.Прочтите статью о проекции вида модели WebGL, чтобы узнать, как это может пригодиться.
Умножение матрицы на точку
В нашем примере кода мы определили функцию для умножения матрицы и точки — multiplyMatrixAndPoint () :
функция multiplyMatrixAndPoint (матрица, точка) {
пусть c0r0 = matrix [0], c1r0 = matrix [1], c2r0 = matrix [2], c3r0 = matrix [3];
пусть c0r1 = matrix [4], c1r1 = matrix [5], c2r1 = matrix [6], c3r1 = matrix [7];
пусть c0r2 = matrix [8], c1r2 = matrix [9], c2r2 = matrix [10], c3r2 = matrix [11];
пусть c0r3 = matrix [12], c1r3 = matrix [13], c2r3 = matrix [14], c3r3 = matrix [15];
пусть x = точка [0];
пусть y = point [1];
пусть z = point [2];
пусть w = точка [3];
пусть resultX = (x * c0r0) + (y * c0r1) + (z * c0r2) + (w * c0r3);
пусть resultY = (x * c1r0) + (y * c1r1) + (z * c1r2) + (w * c1r3);
пусть resultZ = (x * c2r0) + (y * c2r1) + (z * c2r2) + (w * c2r3);
пусть resultW = (x * c3r0) + (y * c3r1) + (z * c3r2) + (w * c3r3);
return [результатX, результатY, результатZ, результатW];
}
Теперь, используя функцию выше, мы можем умножить точку на матрицу.Используя единичную матрицу, он должен возвращать точку, идентичную исходной, поскольку точка (или любая другая матрица), умноженная на единичную матрицу, всегда равна самой себе:
пусть identityResult = multiplyMatrixAndPoint (identityMatrix, [4, 3, 2, 1]);
Возвращение той же точки не очень полезно, но есть другие типы матриц, которые могут выполнять полезные операции с точками. В следующих разделах будут продемонстрированы некоторые из этих матриц.
Умножение двух матриц
Помимо умножения матрицы и точки, вы также можете умножить две матрицы вместе.Вышеуказанная функция может быть повторно использована для помощи в этом процессе:
функция multiplyMatrices (matrixA, matrixB) {
пусть row0 = [matrixB [0], matrixB [1], matrixB [2], matrixB [3]];
пусть row1 = [matrixB [4], matrixB [5], matrixB [6], matrixB [7]];
пусть row2 = [matrixB [8], matrixB [9], matrixB [10], matrixB [11]];
пусть row3 = [matrixB [12], matrixB [13], matrixB [14], matrixB [15]];
пусть result0 = multiplyMatrixAndPoint (matrixA, row0);
пусть результат1 = multiplyMatrixAndPoint (matrixA, row1);
пусть результат2 = multiplyMatrixAndPoint (matrixA, row2);
пусть result3 = multiplyMatrixAndPoint (matrixA, row3);
возвращение [
результат0 [0], результат0 [1], результат0 [2], результат0 [3],
результат1 [0], результат1 [1], результат1 [2], результат1 [3],
результат2 [0], результат2 [1], результат2 [2], результат2 [3],
результат3 [0], результат3 [1], результат3 [2], результат3 [3]
];
}
Давайте посмотрим на эту функцию в действии:
пусть someMatrix = [
4, 0, 0, 0,
0, 3, 0, 0,
0, 0, 5, 0,
4, 8, 4, 1
]
пусть identityMatrix = [
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0,
0, 0, 0, 1
];
пусть someMatrixResult = multiplyMatrices (identityMatrix, someMatrix);
Предупреждение: Эти матричные функции написаны для ясности объяснения, а не для управления скоростью или памятью.Эти функции создают множество новых массивов, что может быть особенно дорогостоящим для операций в реальном времени из-за сборки мусора. В реальном производственном коде лучше всего использовать оптимизированные функции. glMatrix — это пример библиотеки, ориентированной на скорость и производительность. В библиотеке glMatrix основное внимание уделяется целевым массивам, которые выделяются до цикла обновления.
Матрица трансляции основана на единичной матрице и используется в трехмерной графике для перемещения точки или объекта в одном или нескольких из трех направлений (x, y и / или z).Самый простой способ придумать перевод — это взять чашку кофе. Чашка для кофе должна стоять вертикально и ориентироваться таким же образом, чтобы кофе не проливался. Он может двигаться вверх по воздуху от стола и по воздуху в космосе.
На самом деле вы не можете пить кофе, используя только матрицу перевода, потому что, чтобы выпить его, вы должны иметь возможность наклонять или вращать чашку, чтобы налить кофе себе в рот. Мы рассмотрим тип матрицы (которую ловко назвали матрицей вращения ), которую вы используете для этого позже.
пусть x = 50;
пусть y = 100;
пусть z = 0;
пусть translationMatrix = [
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0,
х, у, z, 1
];
Поместите расстояния по трем осям в соответствующие позиции в матрице переноса, затем умножьте их на точку или матрицу, которые необходимо перемещать в трехмерном пространстве.
Действительно простой способ начать использовать матрицу — использовать преобразование CSS Lorem ipsum dolor sit amet, conctetur adipisicing elit ... Наконец, для каждого из примеров мы сгенерируем матрицу 4×4, а затем обновим стиль Посмотреть на JSFiddle
Масштабная матрица создает что-то большее или меньшее в одном или нескольких из трех измерений: ширине, высоте и глубине.В типичных (декартовых) координатах. это вызывает растяжение или сжатие объекта в соответствующих направлениях. Величина изменения, применяемого к ширине, высоте и глубине, размещается по диагонали, начиная с верхнего левого угла и продвигаясь вниз к правому нижнему. Посмотреть на JSFiddle
Матрица вращения используется для поворота точки или объекта.Матрицы поворота выглядят немного сложнее, чем матрицы масштабирования и преобразования. Они используют тригонометрические функции для вращения. Хотя в этом разделе мы не будем разбивать шаги на исчерпывающие детали (для этого ознакомьтесь с этой статьей о Wolfram MathWorld), возьмите этот пример для иллюстрации. Во-первых, вот код, который вращает точку вокруг начала координат без использования матриц. Можно закодировать этот тип шагов в матрицу и сделать это для каждого из измерений x, y и z. Ниже показано вращение против часовой стрелки вокруг оси Z в левой системе координат: Посмотреть на JSFiddle
Вот набор функций, которые возвращают матрицы вращения для вращения вокруг каждой из трех осей.Одно большое замечание: перспектива не применяется, поэтому она может пока не казаться трехмерной. Плоскостность эквивалентна тому, когда камера действительно приближается к объекту на расстоянии — ощущение перспективы исчезает. Просмотр на JSFiddle Реальная мощность матриц исходит от компоновки матриц .Когда матрицы определенного класса перемножаются, они сохраняют историю преобразований и являются обратимыми. Это означает, что если матрица сдвига, поворота и масштабирования объединены вместе, когда порядок матриц изменяется на обратный и применяется повторно, то возвращаются исходные точки. Порядок умножения матриц имеет значение. При умножении чисел a * b = c и b * a = c истинны. Например, 3 * 4 = 12 и 4 * 3 = 12. В математике эти числа будут описаны как коммутативное .Матрицы , а не , гарантированно будут одинаковыми при переключении порядка, поэтому матрицы некоммутативны . Еще одна загвоздка в том, что умножение матриц в WebGL и CSS должно происходить в порядке, обратном интуитивно понятным операциям. Например, чтобы уменьшить что-либо на 80%, переместить его на 200 пикселей вниз, а затем повернуть вокруг начала координат на 90 градусов, это в псевдокоде будет выглядеть примерно так. Для составления наших матриц мы будем использовать функцию Посмотреть на JSFiddle
Наконец, забавный шаг, демонстрирующий, как работают матрицы, — это перевернуть шаги, чтобы вернуть матрицу к исходной единичной матрице. Матрицы важны, потому что они содержат небольшой набор чисел, который может описывать широкий диапазон преобразований в пространстве. matrix3d () .Сначала мы создадим простой
Переместите меня с помощью матрицы
matrix3d .Имейте в виду, что хотя матрица состоит из 4 строк и 4 столбцов, она сворачивается в одну строку из 16 значений. В JavaScript матрицы всегда хранятся в одномерных списках.
function matrixArrayToCssMatrix (array) {
return 'matrix3d (' + array.join (',') + ')';
}
let moveMe = document.getElementById ('переместить меня');
let matrix3dRule = matrixArrayToCssMatrix (translationMatrix);
moveMe.style.transform = matrix3dRule;
пусть w = 1,5;
пусть h = 0,7;
пусть d = 1;
пусть scaleMatrix = [
ш, 0, 0, 0,
0, з, 0, 0,
0, 0, д, 0,
0, 0, 0, 1
];
пусть точка = [10, 2];
let distance = Math.sqrt (точка [0] * точка [0] + точка [1] * точка [1]);
пусть вращениеInRadians = Math.PI / 3;
пусть transformedPoint = [
Math.cos (вращениеInRadians) * расстояние,
Math.sin (вращениеInRadians) * расстояние
];
let sin = Math.sin;
пусть cos = Math.cos;
пусть a = Math.PI * 0,3;
пусть rotateZMatrix = [
cos (a), -sin (a), 0, 0,
грех (а), соз (а), 0, 0,
0, 0, 1, 0,
0, 0, 0, 1
];
function rotateAroundXAxis (a) {
возвращение [
1, 0, 0, 0,
0, cos (a), -sin (a), 0,
0, грех (а), соз (а), 0,
0, 0, 0, 1
];
}
function rotateAroundYAxis (a) {
возвращение [
соз (а), 0, грех (а), 0,
0, 1, 0, 0,
-sin (a), 0, cos (a), 0,
0, 0, 0, 1
];
}
function rotateAroundZAxis (a) {
возвращение [
cos (a), -sin (a), 0, 0,
грех (а), соз (а), 0, 0,
0, 0, 1, 0,
0, 0, 0, 1
];
}
трансформация = поворот * перевод * масштаб
Составление нескольких преобразований
multiplyArrayOfMatrices () , которая является частью набора служебных функций, представленных в верхней части этой статьи.Он берет массив матриц и умножает их вместе, возвращая результат. В коде шейдера WebGL это встроено в язык, и можно использовать оператор * . Кроме того, в этом примере используются функции scale () и translate () , которые возвращают матрицы, как определено выше.
пусть transformMatrix = MDN.multiplyArrayOfMatrices ([
rotateAroundZAxis (Math.PI * 0,5),
перевести (0, 200, 0),
шкала (0,8, 0,8, 0,8),
]);
пусть transformMatrix = MDN.multiplyArrayOfMatrices ([
шкала (1,25, 1,25, 1,25),
перевести (0, -200, 0),
rotateAroundZAxis (-Math.PI * 0,5),
rotateAroundZAxis (Math.PI * 0,5),
перевести (0, 200, 0),
шкала (0,8, 0,8, 0,8),
]);