Типы и размеры матриц камер видеонаблюдения
Рассмотрим типы матриц. И начнем от обратного. Матрицы, не использующиеся Hikvision — CCD-матрицы.
По сравнению с технологией CMOS, которую применяет в своих камерах Hikvision, CCD-матрицы позволяют создавать высококачественное изображение. В процессе съемки возникает гораздо меньше шумов, а бороться с все же возникшими намного легче, чем в матрицах CMOS.
Еще одним важным показателем является их высокая эффективность. Например, коэффициент заполнения у матриц CCD приближается к 100%, а соотношение зарегистрированных матрицей фотонов к их общему числу — 95%. Если сравнивать с нашими глазами, то при расчёте в тех же единицах соотношение составит только 1%.
К недостаткам CCD-матриц можно отнести сложность процесса. Для фиксации изображения в камере необходимо дополнительное наличие целого перечня устройств. Это приводит к более высокому энергопотреблению, делает их дороже в производстве и «капризнее» в эксплуатации.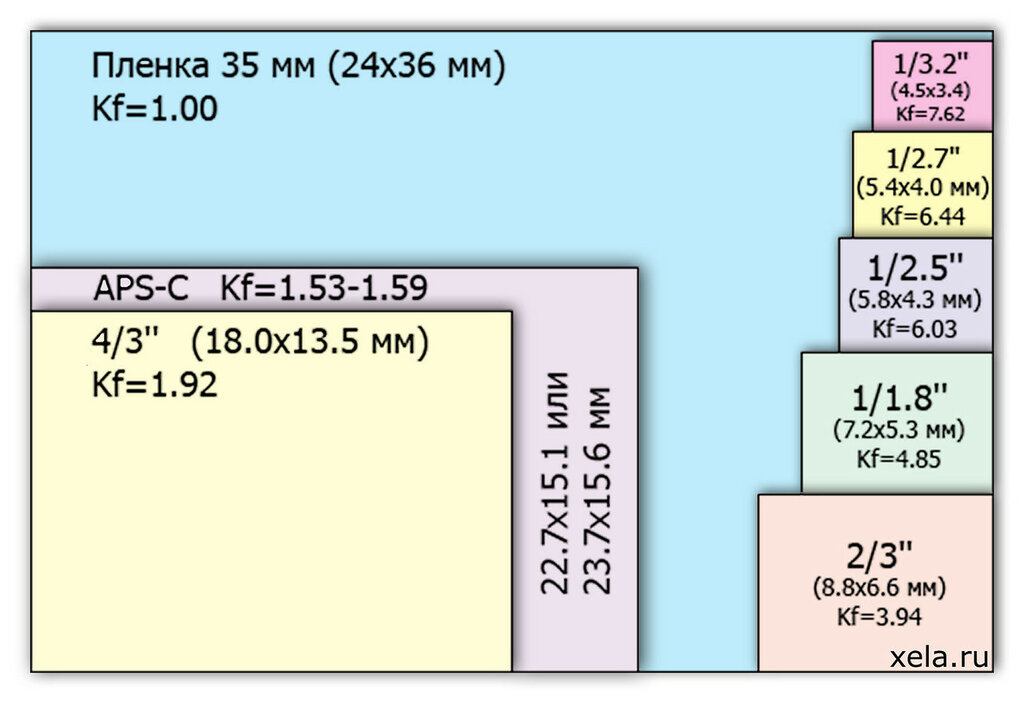
Теперь о CMOS-матрицах.
Главное достоинство CMOS-матриц — более низкое энергопотребление и возможность произвольного считывания ячеек, а это CCD-матрице недоступно, там считывание происходит одновременно. Благодаря произвольному считыванию в CMOS-матрицах нет размазывания изображения.
Еще одно достоинство – расположение значительной части электроники непосредственно на ячейке, благодаря этому появляются широкие возможности управления матрицей и изображением.
При всех имеющихся достоинствах данной технологии, недостатков хватает. Главный — незначительный размер светочувствительного элемента в соотношении к общей площади пикселя. Одно из основных достоинств – расположения электроники на ячейке. Но из него вытекает еще один недостаток — значительная часть площади пикселя занята электроникой, а значит, уменьшена площадь светочувствительного элемента.
В то же время нельзя не отметить, что CMOS был модифицирован несколько лет назад, и для видеонаблюдения CMOS-матрицы действительно подходят лучше (благодаря чёткому изображению, низкому энергопотреблению и возможности уменьшать ]]>битрейт видео]]>.
Размеры матриц
Матрицы для видеокамер бывают разного физического размера: 1/2″, 1/3″, 1/4″, 1/6″ и т.д. Чем больше физический размер матрицы, тем лучше качество картинки. Но и цена камеры растет вместе с размером матрицы. Размер такого «дюйма» — 16 мм, (унаследовано от видикона диаметром 1″, рабочая диагональ там была именно 16 мм), и называется он «видиконовый дюйм». Впрочем, это название используется нечасто.
Это то, что стоит знать при выборе камеры, рассматривая гипотетическую ситуацию (с преувеличенными значениями), 10-мегапиксельная камера с матрицей 1/10″ будет давать большое изображение довольно скверного качества. Представьте, как мало фотоинформации будет получать камера, при примерно 10. 000. 000 пикселей на матрицу с диагональю 1.6 мм.
Размер сенсора цифровой камеры: влияние на фотографию
Данная глава посвящена вопросу: как размер сенсора цифровой камеры влияет на различные типы фотографии? Выбор размера сенсора аналогичен выбору между плёночными камерами 35 мм, среднего и большого формата — с некоторыми существенными отличиями, присущими цифровым технологиям. Эта тема порождает множество недоразумений, поскольку размеры сенсоров существенно варьируются, и плюс к тому есть много параметров выбора, включая глубину резкости, визуальный шум, дифракцию, стоимость и размер/вес.
Эта тема порождает множество недоразумений, поскольку размеры сенсоров существенно варьируются, и плюс к тому есть много параметров выбора, включая глубину резкости, визуальный шум, дифракцию, стоимость и размер/вес.
Я написал эту статью после того, как провёл собственное исследование, которое имело целью выяснить, является ли Canon EOS 5D в действительности шагом вверх по сравнению с 20D для моих целей. Основные понятия, обсуждаемые в этой статье, можно найти в главе, посвящённой сенсорам цифровых камер.
Обзор размеров сенсоров
Существует множество сенсоров разного размера, в зависимости от их использования, ценовой категории и требуемой портативности. Относительные размеры для многих из них показаны ниже:
Canon 1Ds/1DsMkII/5D и Kodak DCS 14n являются наиболее распространёнными полнокадровыми сенсорами. Такие камеры Canon, как 300D/350D/10D/20D, все используют кроп-фактор 1.6, тогда как в камерах Nikon, таких как D70(s)/D100 используется кроп-фактор 1.5.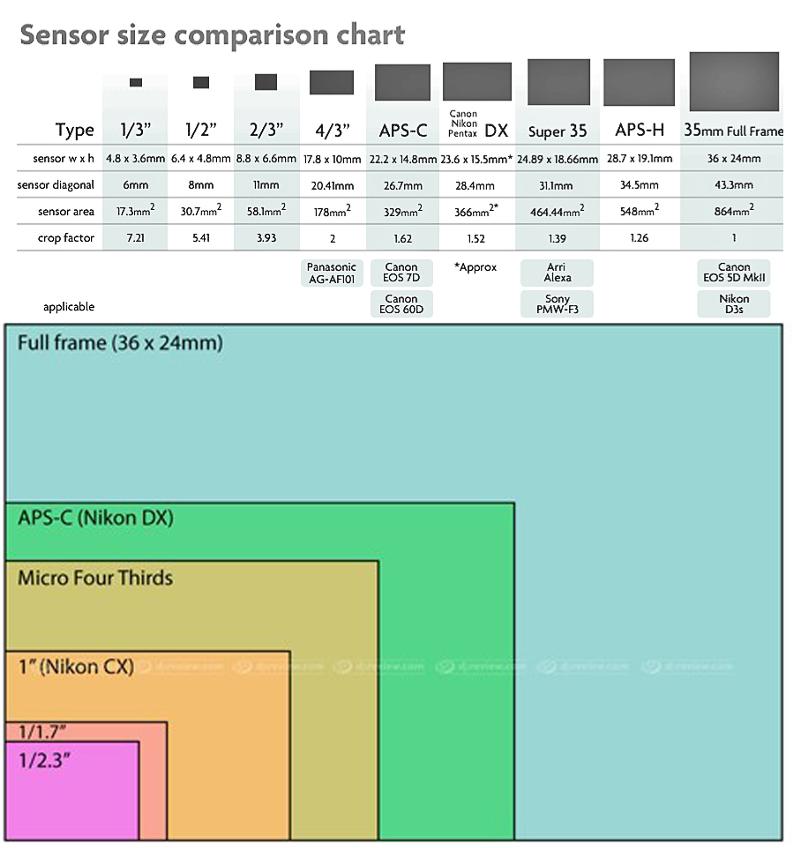 В диаграмме отсутствует кроп-фактор 1.3, который используется в серии 1D камер Canon.
В диаграмме отсутствует кроп-фактор 1.3, который используется в серии 1D камер Canon.
Камеры телефонов и другие компактные камеры используют сенсоры в диапазоне от ~1/4″ до 2/3″. Olympus, Fuji и Kodak объединились для создания стандарта 4/3, который имеет кроп-фактор 2 относительно плёнки 35 мм. Существуют сенсоры среднего формата и даже больше, однако они намного менее распространены и в настоящее время невозможно дороги, в связи с чем мы не рассматриваем их здесь, хотя к ним применимы те же принципы.
Кроп-фактор и множитель фокусного расстояния
Кроп-фактором называют отношение диагонали полного кадра (35 мм) к диагонали сенсора. Называют его так, поскольку при использовании 35 мм объектива сенсор по сути обрезает края изображения (в связи со своим уменьшенным размером).
| Угол зрения полного кадра 35 мм |
На первый взгляд можно предположить, что потеря информации об изображении никогда не будет уместна, но в действительности в ней есть свои преимущества.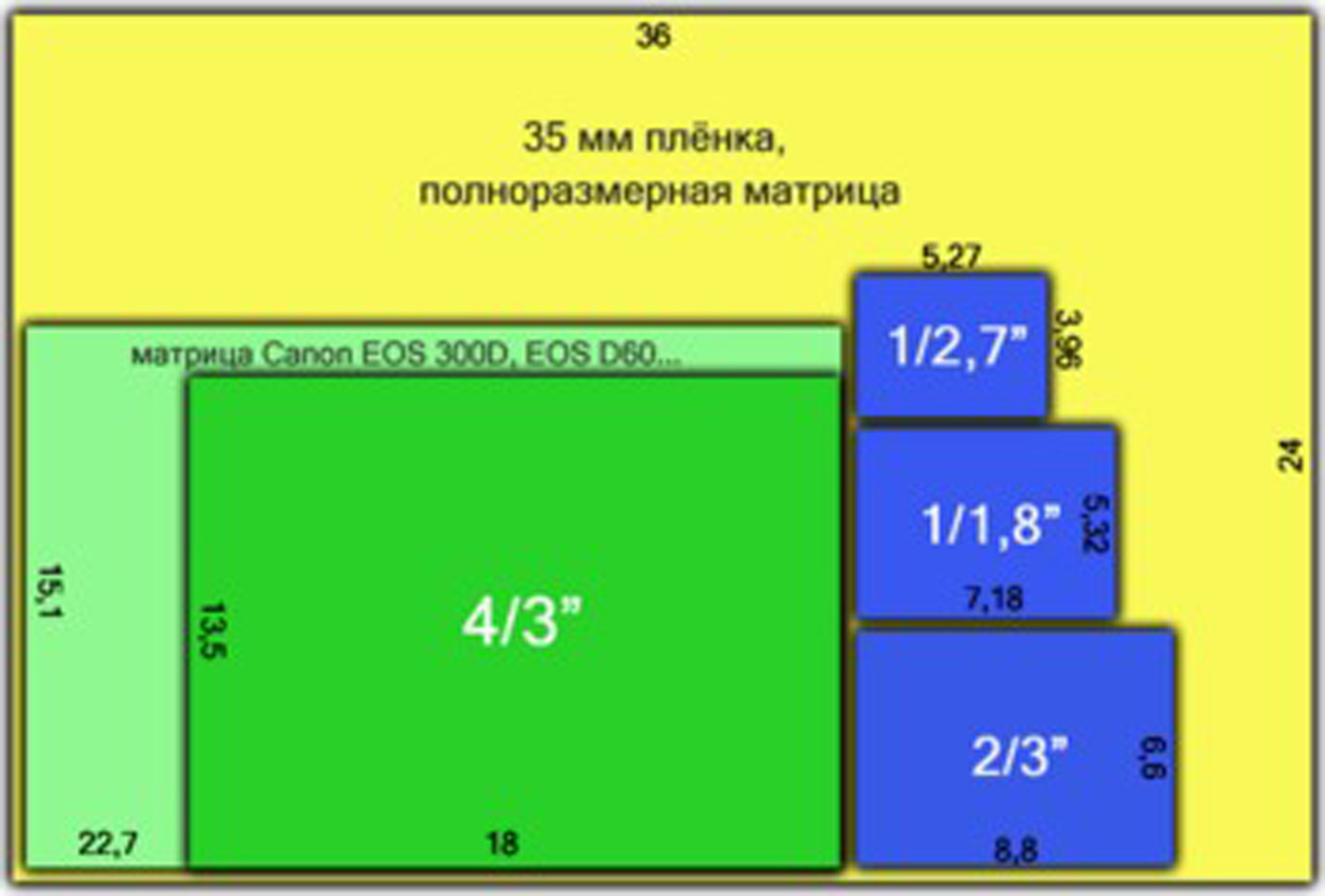
| Полный снимок | Центральный фрагмент | Угловой фрагмент |
С другой стороны это означает, что используется намного больший объектив, чем эт ов действительности необходимо — что становится особенно заметно, если камеру приходится носить долгое время (см. ниже). В идеале следовало бы использовать практически всё изображение, передаваемое объективом, и объектив должен быть при этом достаточно высокого качества, чтобы изменения резкости от центра к краям были пренебрежимо малы.
Вдобавок, оптическое качество широкоугольных объективов редко настолько же велико, как у объективов с большими фокусными расстояниями. Поскольку обрезанный сенсор вынужден использовать более широкоугольные объективы для получения того угла обзора, который возможен для сенсора большего размера, это ухудшает качество. Кроме того, сенсоры меньшего размера больше используют центральное поле зрения объектива, так что пределы его разрешающей способности станут более заметны для объективов худшего качества.
Поскольку обрезанный сенсор вынужден использовать более широкоугольные объективы для получения того угла обзора, который возможен для сенсора большего размера, это ухудшает качество. Кроме того, сенсоры меньшего размера больше используют центральное поле зрения объектива, так что пределы его разрешающей способности станут более заметны для объективов худшего качества.
Аналогично, множитель фокусного расстояния относит фокусное расстояние объектива, используемого с сенсором меньшего формата, к фокусному расстоянию объектива с таким же углом зрения на 35 мм, и он равен кроп-фактору. Это означает, что объектив 50 мм, используемый с сенсором, кроп-фактор которого равен 1.6, обеспечит тот же угол зрения,что и объектив 1.6 x 50 = 80 мм для полно кадрового сенсора 35 мм.
Учтите, что каждый из этих терминов может несколько дезориентировать. Фокусное расстояние объектива в действительности не меняется при использовании его с сенсором другого размера — изменяется исключительно угол зрения. Объектив 50 мм всегда будет объективом 50 мм, вне зависимости от типа сенсора. В то же время «кроп-фактор» может быть неподходящим термином для описания малых сенсоров, поскольку обрезание изображения далеко не всегда имеет место (если используются объективы, разработанные для данного сенсора).
Объектив 50 мм всегда будет объективом 50 мм, вне зависимости от типа сенсора. В то же время «кроп-фактор» может быть неподходящим термином для описания малых сенсоров, поскольку обрезание изображения далеко не всегда имеет место (если используются объективы, разработанные для данного сенсора).
Размер и вес объектива
Меньшие сенсоры требуют более лёгких объективов (для эквивалентного угла зрения, диапазона зума, качества сборки и диапазона диафрагм). Это отличие может быть критично для съёмок дикой природы, в походах и поездках, поскольку в них зачастую требуется использовать более тяжёлые объективы или носить оборудование длительные периоды времени. Следующий график иллюстрирует этот тренд на примере выбора типичных телеобъективов Canon для съёмок спорта и дикой природы:
Подразумевается, что если требуется достичь на 35 мм камере того же приближения, которое достигается объективом 200 мм f/2.8 на камере с кроп-фактором 1.5 (то есть, использовать объектив 300 мм f/2. 8), придётся носить в 3.5 раза больший вес! Это если не принимать в расчёт разницу в размерах между ними, которая может быть важна, если не хочется привлекать внимание публики. Вдобавок, более тяжёлые объективы обычно значительно дороже стоят.
8), придётся носить в 3.5 раза больший вес! Это если не принимать в расчёт разницу в размерах между ними, которая может быть важна, если не хочется привлекать внимание публики. Вдобавок, более тяжёлые объективы обычно значительно дороже стоят.
В зеркальных камерах увеличение размера сенсора означает заодно увеличение размера и прозрачности картинки в видоискателе, что может быть особенно полезно при ручной фокусировке. Однако, такая конструкция также будет тяжелее и стоить больше, поскольку требует большего размера пентапризмы (или пентазеркала), чтобы передать свет от объектива к видоискателю и далее на сетчатку вашего глаза.
Требования к глубине резкости
При увеличении размера сенсора глубина резкости при заданной диафрагме уменьшится (для предмета съёмки тех же размеров и на том же расстоянии). Происходит это потому, что сенсор большего размера для заполнения кадра потребует либо приблизиться к предмету съёмки, либо использовать большее фокусное расстояние. Сокращение дистанции фокусировки означает сокращение глубины резкости, для компенсации которого потребуется увеличить число диафрагмы (закрыть её сильнее). Следующий калькулятор определяет необходимые диафрагму и фокусное расстояние для сохранения глубины резкости (при неизменной перспективе).
| Эквиваленты ГРИП | ||
|---|---|---|
| Сенсор №1 | цифровая зеркальная, кроп-фактор 1.6цифровая компактная, сенсор 1/3″цифровая компактная, сенсор 1/2″цифровая компактная, сенсор 1/1.8″цифровая компактная, сенсор 2/3″цифровая зеркальная, сенсор 4/3″цифровая зеркальная, кроп-фактор 1.5APSцифровая зеркальная, кроп-фактор 1.335 мм6×4.5 см 6×6 см6×7 см5×4 дюйма10×8 дюймов | |
| Выбранная диафрагма | F 1.2F 1.4F 1.8F 2F 2.8F 4F 5.6 F 8F 11F 16F 22F 32F 64 | |
| Фокусное расстояние | мм | |
| Сенсор №2 | цифровая зеркальная, кроп-фактор 1. 6цифровая компактная, сенсор 1/3″цифровая компактная, сенсор 1/2″цифровая компактная, сенсор 1/1.8″цифровая компактная, сенсор 2/3″цифровая зеркальная, сенсор 4/3″цифровая зеркальная, кроп-фактор 1.5APSцифровая зеркальная, кроп-фактор 1.335 мм6×4.5 см 6×6 см6×7 см5×4 дюйма10×8 дюймов 6цифровая компактная, сенсор 1/3″цифровая компактная, сенсор 1/2″цифровая компактная, сенсор 1/1.8″цифровая компактная, сенсор 2/3″цифровая зеркальная, сенсор 4/3″цифровая зеркальная, кроп-фактор 1.5APSцифровая зеркальная, кроп-фактор 1.335 мм6×4.5 см 6×6 см6×7 см5×4 дюйма10×8 дюймов |
|
| Фокусное расстояние (та же перспектива) Требуемая диафрагма |
||
В качестве примера расчёта, если захотеть воспроизвести ту же перспективу и глубину резкости на полнокадровом сенсоре, которые были получены при помощи объектива 10 мм при диафрагме f/11 на камере с кроп-фактором 1.6, понадобилось бы использовать объектив 16 мм и диафрагму порядка f/18. Иначе, если использовать объектив 50 мм f/1.4 на полнокадровом сенсоре, полученная глубина резкости была бы настолько мала, что на камере с кроп-фактором 1.6 для этого потребовалась бы диафрагма 0.9 — для потребительских объективов недостижимая!
Малая глубина резкости может быть желательна для портретов, поскольку она улучшает размытие фона, тогда как большая глубина резкости желательна для пейзажно-ландшафтной съёмки. Вот почему компактные камеры бьются за получение хорошего размытия фона на портретах, тогда как камеры большого формата бьются за требуемую глубину резкости пейзажей.
Вот почему компактные камеры бьются за получение хорошего размытия фона на портретах, тогда как камеры большого формата бьются за требуемую глубину резкости пейзажей.
Примите во внимание, что вышеприведенный калькулятор предполагает, что у вас есть объектив для второго сенсора, который может воспроизвести угол зрения первого. Если вы используете один и тот же объектив, требования по диафрагме сохранятся, но вам потребуется приблизиться к объекту (или отдалиться от него). Однако при этом заодно изменится перспектива.
Влияние дифракции
Сенсоры большего размера могут использовать меньшие диафрагмы, прежде чем кружок рассеивания станет больше, чем кружок нерезкости (определяется печатным размером и критериями резкости). Происходит это в первую очередь потому, что большие сенсоры не требуют настолько большого увеличения зафиксированного ими изображения для получения аналогичного печатного размера. Например, если использовать (теоретически) цифровой сенсор размером 20×25 см, отпечатки размером 8×10 см вообще не потребуют увеличения, тогда как отпечаток с сенсора 35 мм потребовал бы существенного увеличения.
Следующий калькулятор может быть использован для оценки дифракционного предела резкости. Учтите, что его результаты справедливы только для визуального контроля изображения на экране в масштабе 100% — то есть, различимость дифракции в отпечатке будет также зависеть от расстояния просмотра и печатного размера. Для получения расчёта по этим параметрам используйте калькулятор, приведенный в главе о дифракционном пределе в фотографии.
Не забывайте, что усиление влияния дифракции происходит постепенно, так что диафрагмы несколько меньшие или большие полученного значения дифракционного предела не станут внезапно выглядеть лучше или хуже, соответственно. Используя Canon 20D, например, зачастую можно применять f/11 без заметных изменений резкости в фокальной плоскости, но если закрывать диафрагму сильнее, дифракция становится хорошо заметна. Далее, вышеприведенная цифра является всего лишь теоретическим пределом, в действительности значение будет также зависеть от характеристик объектива.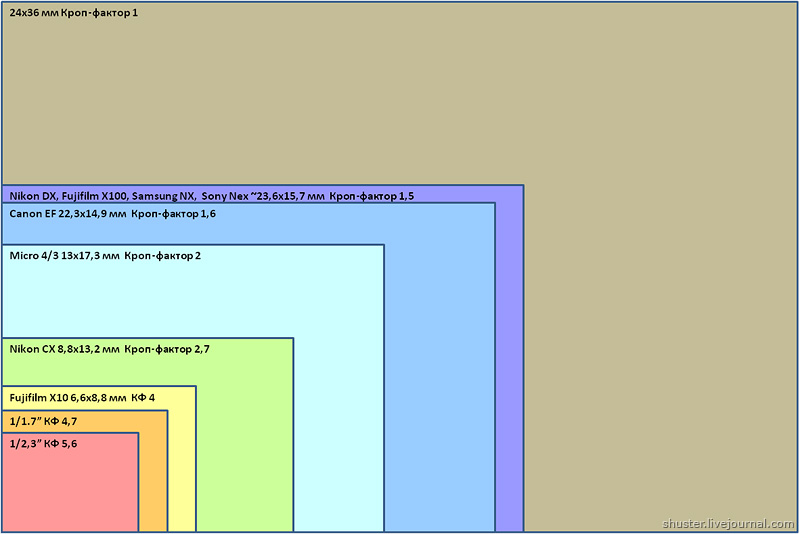 Следующая диаграмма показывает размер диска Эйри (теоретического максимума разрешающей способности) для двух диафрагм в матрице, отображающей размер пикселя:
Следующая диаграмма показывает размер диска Эйри (теоретического максимума разрешающей способности) для двух диафрагм в матрице, отображающей размер пикселя:
| Разрешение ограничено плотностью пикселей (требование малой ГРИП) |
Разрешение ограничено диском Эйри (требование большой ГРИП) |
Важным следствием этих явлений является то, что дифракционный предел размера пикселя увеличивается для сенсоров большего размера (если требуемая глубина резкости остаётся неизменной). Именно размер пикселя определяет момент, когда размер кружка рассеивания становится ограничивающим фактором общего разрешения — но не плотность пикселей. Далее, дифракционный предел ГРИП является константой для всех размеров сенсоров. Этот фактор может быть критическим при выборе новой камеры для целевого использования, поскольку большее число пикселей необязательно обеспечит прирост разрешающей способности (для определённых требований к глубине резкости). Фактически, увеличение числа пикселей может даже повредить качеству изображения, повысив шумность и сократив динамический диапазон (в следующем разделе).
Фактически, увеличение числа пикселей может даже повредить качеству изображения, повысив шумность и сократив динамический диапазон (в следующем разделе).
Размер пикселя: уровень шума и динамический диапазон
Сенсоры большего размера обычно имеют пиксели большего размера (хотя это не всегда так), что потенциально означает меньший визуальный шум и больший динамический диапазон. Динамический диапазон описывает диапазон оттенков цветности, которые сенсор в состоянии записать, прежде чем пиксель окажется абсолютно белым, но не ниже уровня, при котором текстура становится неотличима от фонового шума (близко к чёрному). Поскольку пиксели большего размера занимают больший объём — и, следовательно, имеют большую фотонную ёмкость — их динамический диапазон тоже как правило больше.
Примечание: ёмкости показаны без цветофильтров
Далее, более крупные пиксели получают больший поток фотонов за время заданной экспозиции (при одинаковой диафрагме), так что их светосигнал намного сильнее. Для аналогичного количества фонового шума достигается более высокое соотношение сигнал-шум — и как следствие, более гладкое фото.
Для аналогичного количества фонового шума достигается более высокое соотношение сигнал-шум — и как следствие, более гладкое фото.
| Крупные пиксели (часто больший сенсор) |
Мелкие пиксели (часто меньший сенсор) |
Однако это не всегда так, поскольку уровень фонового шума зависит также от технологии производства сенсора и от того, насколько эффективно камера извлекает тональную информацию из каждого пикселя (не внося дополнительный шум). В остальном вышеописанная тенденция верна. Ещё один аспект, который имеет смысл учитывать, состоит в том, что даже если два сенсора имеют одинаковый видимый шум при просмотре в масштабе 100%, сенсор с большим числом пикселей выдаст более чистый финальный отпечаток. Произойдёт это потому, что на сенсоре с большим числом пикселей шум будет меньше увеличен (для заданного печатного размера), следовательно, это будет более высокочастотный шум, с более мелким зерном.
Стоимость производства цифрового сенсора
Стоимость цифрового сенсора драматически повышается по мере увеличения его площади. Это означает, что сенсор удвоенной площади будет стоить гораздо более, чем вдвое дороже, так что вы в действительности платите больше за единицу площади сенсора по мере увеличения его размера.
| Кремниевый диск (поделен на маленькие сенсоры) |
Кремниевый диск (поделен на большие сенсоры) |
Понять это можно, взглянув на процесс производства цифровых сенсоров. Каждый сенсор вырезается из большого листа кремния, называемого подложкой, который может содержать тысячи индивидуальных чипов. Каждый лист невероятно дорог(тысячи долларов), и как следствие, чем меньше чипов можно получить из листа, тем дороже будет каждый из них. Далее, степень отбраковки (слишком много сгоревших пикселей или что-нибудь ещё) нарастает по мере прироста размера сенсора, то есть процент пригодных к использованию сенсоров (выход с листа) падает.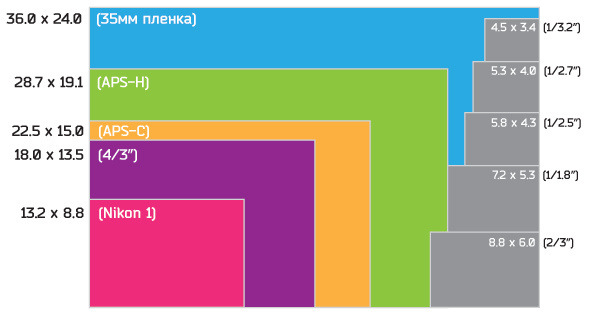 Считая эти факторы (количество чипов с листа и доход) самыми важными, считаем стоимость возрастающей пропорционально квадрату площади сенсора (сенсор двойного размера будет стоить вчетверо дороже). В действительности отношение размера к стоимости имеет более сложную форму, но квадратичный расчёт поможет вам оценить, насколько быстро растёт стоимость.
Считая эти факторы (количество чипов с листа и доход) самыми важными, считаем стоимость возрастающей пропорционально квадрату площади сенсора (сенсор двойного размера будет стоить вчетверо дороже). В действительности отношение размера к стоимости имеет более сложную форму, но квадратичный расчёт поможет вам оценить, насколько быстро растёт стоимость.
Это не значит, что сенсоры определённого размера всегда будут невозможно дороги; их стоимость может однажды упасть, но относительная стоимость большого сенсора всегда будет намного больше (за единицу площади) по сравнению с некоторым меньшим размером.
Прочие соображения
Некоторые объективы доступны только для определённых размеров сенсоров (в противном случае могут не работать), что тоже может оказаться соображением, если они нужны для вашего стиля фотографии. Одним из примечательных типов объективов является сдвиго-поворотный (tilt/shift), который можно применять для увеличения (или уменьшения) видимой глубины резкости посредством поворота или управления перспективой с помощью сдвига для снижения (или исключения) завала вертикали, вызванного отклонением камеры от линии горизонта (полезно при съёмке архитектуры).
Итоги: общая детальность изображения и взаимоисключающие факторы
Глубина резкости для сенсоров больших форматов намного меньше, однако они также позволяют закрыть диафрагму намного сильнее, прежде чем дифракционный предел будет достигнут (для выбранного печатного размера и критериев резкости). Так у какого же из вариантов есть потенциал сделать наиболее детальный снимок? Большие сенсоры (и соответствующие большие количества пикселей) без сомнения создают более детальные изображения, если вы можете позволить себе пожертвовать глубиной резкости. С другой стороны, если вы хотите сохранить определённую глубину резкости, большие размеры сенсоров необязательно имеют преимущество в разрешающей способности. Далее, дифракционный предел глубины резкости одинаков для всех размеров сенсоров. Другими словами, если требуется использовать предельно закрытую диафрагму до проявления эффекта дифракции, все размеры сенсоров создадут одинаковую глубину резкости — несмотря на то, что дифракционный предел числа диафрагмы будет различным.
Техническое примечание: подразумевается, что размер пикселя сравним с размером дифракционного кружка рассеивания (диска Эйри) для каждого из сенсоров, и что используются объективы сравнимого качества. Более того, поворотные объективы гораздо больше распространены для камер больших форматов — позволяя изменить угол фокальной плоскости и, как следствие, увеличить видимую глубину резкости.
Ещё одно важное следствие таково: если решающим параметром оказывается глубина резкости, требуемая длительность экспозиции увеличивается вместе с размером сенсора при одинаковой чувствительности ISO. Этот фактор, пожалуй, максимально влияет на макросъёмку и ночную фотографию, поскольку для каждой из них может потребоваться большая глубина резкости и разумная длительность экспозиции. Заметьте, что если снимок может быть сделан с рук на меньшем формате, необязательно то же самое можно снять с рук на большем.
С другой стороны, длительности выдержки необязательно вырастут настолько сильно, как может показаться на первый взгляд, поскольку большие сенсоры обычно меньше шумят (и, соответственно, могут позволить использовать большую чувствительность ISO с сохранением аналогичного уровня визуального шума).
В идеале, уровень визуального шума (на данном печатном размере) обычно падает при увеличении размера сенсора цифровой камеры (вне зависимости от размера пикселя).
Вне зависимости от размера пикселя, большие сенсоры неизбежно имеют большую площадь светосборника. Теоретически сенсор большого размера с маленькими пикселями по-прежнему будет показывать меньше визуального шума (для выбранного печатного размера), чем меньший сенсор с большими пикселями (и значительно меньшим числом пикселей, как следствие), поскольку шум камеры с высокой разрешающей способностью подвергается меньшему увеличению, даже если при просмотре в масштабе 100% на экране компьютера снимок выглядит более зашумленным. Иначе, можно усреднить смежные пиксели сенсора с большим числом пикселей (тем самым уменьшив случайный шум), достигнув при этом разрешения сенсора с меньшим числом пикселей. Именно поэтому изображения, уменьшенные для публикации на сайтах и мелкоразмерных отпечатков, выглядят настолько бесшумно.
В целом: сенсоры больших размеров обычно предоставляют больше контроля и художественной гибкости, но за счёт увеличения размера и веса объективов, а также общей стоимости. Такая гибкость позволяет использовать меньшую глубину резкости, чем это возможно для меньшего сенсора (если это требуется), и при этом позволяет достичь сравнимой глубины резкости при использовании меньшего отверстия диафрагмы и более высокой чувствительности ISO (или штатива).
Камера смартфона для «чайников» №3. Погружаемся в матрицу!
Оценка этой статьи по мнению читателей:Мы продолжаем погружаться в удивительный мир фотографии и в этой части подробно поговорим не только о матрицах и пикселях, но и о мобильной фотографии в целом.
Моя статья о влагозащите фитнес-браслетов для многих стала откровением, так как противоречила всему тому, о чем писали другие сайты. Эта статья, надеюсь, вызовет похожий эффект.
Проблема с интернетом заключается в том, что при смене технологий, популярные ресурсы не удаляют старый материал (да и с чего бы им это делать?). Затем приходят молодые авторы, читают и пересказывают информацию, которая уже давно не соответствует действительности.
Так было с часами и влагозащитой. В 2010 году многое изменилось, но куда девать все те статьи, что были написаны в течение двух предыдущих десятилетий? То же происходит и с камерами. Каждый человек видит просто феноменальный прорыв в области мобильных камер за последнее десятилетие, но продолжает повторять одну и ту же ерунду о маленьких матрицах и прочих ограничениях камерофонов.![]()
Пришло время разобраться, на что именно влияет размер матрицы и пикселя, что такое шум и от чего он зависит, почему современные смартфоны снимают гораздо лучше, чем первые мобильные камеры и можно ли уменьшать размеры, увеличивая качество.
Чтобы сделать эту статью максимально понятной, я постараюсь избегать сложных терминов, заменяя их более простыми аналогиями. Тем не менее, информации будет очень много, поэтому на легкое чтение рассчитывать не стоит.
Для тех, кто попал сюда впервыеВначале давайте вкратце вспомним, о чем говорилось ранее. В первой части мы разобрались с тем, каким образом свет переносит изображение в пространстве. Как оказалось, даже через окна в наши дома попадает не «простой свет», а картинка всего того, что происходит за окном. Но так как окна слишком большие, эта картинка получается настолько размытой, что мы не видим никаких четких очертаний.
У камеры смартфона есть такое же окошко — небольшое отверстие в объективе, через которое свет попадает внутрь устройства. Размер этого окошка обозначается в характеристиках смартфона буквами f/1.8 или f/2.4. Первая часть подробно объяснила, как понимать эти значения и на что они влияют.
Размер этого окошка обозначается в характеристиках смартфона буквами f/1.8 или f/2.4. Первая часть подробно объяснила, как понимать эти значения и на что они влияют.
Во второй части мы проследили за тем, что происходит дальше, когда свет прошел через отверстие объектива. В частности, мы детально рассмотрели, чем отличаются объективы смартфонов, что такое фокусное расстояние, за счет чего происходит приближение картинки и как определить настоящий (оптический) зум.
Вторая часть объяснила еще один важный параметр любой камеры, который в характеристиках указывается в миллиметрах, например, 26 мм или 130 мм.
Если посмотреть на типичные характеристики камеры любого смартфона, то мы увидим, что осталось еще много непонятных букв и цифр:
Основная камера: 108 Мп, 1/1.33″, f/1.8, 26 мм, 0.8 мкм, PDAF
В этой части я расскажу, как понимать характеристики, выделенные жирным шрифтом. Все они относятся к матрице: ее размерам, количеству пикселей и размеру одного пикселя.
Все они относятся к матрице: ее размерам, количеству пикселей и размеру одного пикселя.
Собираем отпечатки света
Для начала нужно понять, каким образом свет, прошедший через объектив и попавший на матрицу камеры, оставляет там свои «следы».
Если кто-то не знает, матрица — это аналог пленки, на которую объектив камеры проецирует изображение. Если бы вместо матрицы мы просто разместили белый фон, на нем бы точно также появилось качественное цветное изображение, но вот сохранить его нам бы не удалось.
Вместо белого фона мы размещаем специальную пластинку, сделанную из песка. Точнее, делается она из кремния, а кремний в соединении с кислородом (диоксид кремния) и есть песок.
Так вот, если специально обработать чистый кремний и подключить к нему небольшое питание, можно добиться от него очень интересного поведения. Когда фотон (мельчайшая частичка света) попадает на такую пластинку, он поглощается кремнием и тут же высвобождает электрон:
Правда, фотон должен обладать достаточной энергией, чтобы выбить электрон из атома кремния, поэтому поглощается далеко не весь свет, а только тот, длина волны которого колеблется в пределах примерно от 400 до 1100 нанометров. И так уж совпало, что видимый нами свет идеально попадает в этот диапазон.
Матрица камеры смартфона состоит из миллионов крохотных пикселей — таких вот необычных кусочков кремния, реагирующих на свет. Помимо светочувствительного кремния, пиксель содержит еще множество других элементов, но для простоты восприятия пока упустим эти детали.
Итак, фотон успешно проник внутрь кремния и, «растворившись» в нём, образовал один электрон. Что же происходит с этим электроном дальше? Он попадает в специальную ловушку и оказывается на дне потенциальной ямы, выбраться самостоятельно из которой очень непросто.
Бывают ситуации, когда фотон подлетает к пикселю, но это не приводит к появлению электрона. Почему? Причины могут быть разными. К примеру, если длина волны этого фотона очень короткая, он будет поглощен еще в самом верхнем слое пикселя, а для очень длинной световой волны кремний и вовсе окажется прозрачным, фотон пролетит его насквозь, даже не заметив.
И здесь мы подходим к первому важному понятию, которое частично объясняет, почему современные смартфоны снимают так хорошо — это квантовая эффективность пикселя. Звучит страшно, но по сути это очень простое явление.
Звучит страшно, но по сути это очень простое явление.
Если к поверхности пикселя подлетают 10 фотонов, но только 3 из них поглощаются кремнием (и, соответственно, высвобождаются 3 электрона), то 7 фотонов просто потерялись. Они оказались бесполезными. Получается, эффективность такого пикселя составила всего 30%, то есть, только 3 из 10 фотонов, попадающих на пиксель, будут высвобождать электроны. А значит, квантовая эффективность равняется 30%.
Исследовательские центры крупных производителей смартфонов постоянно работают над увеличением этого показателя. Если в «древности» квантовая эффективность не превышала 10%, то в современных мобильных матрицах она может достигать 120% в зависимости от длины волны света.
Как это возможно? Весь секрет в том, что в новых светочувствительных материалах один фотон может создавать более одного электрона (более одной пары электрон-дырка, если говорить научным языком). Вот, к примеру, посмотрите на зависимость квантовой эффективности нового пикселя от Samsung, используемого в матрицах на 64 и 108 Мп (технология ISOCELL Plus):
А ведь еще каких-то пару лет назад квантовая эффективность пикселей была на 20-30% ниже. Получается, пиксели уменьшаются, а их квантовая эффективность возрастает. То есть, современный маленький пиксель будет более светочувствительным, нежели крупный пиксель старого камерофона.
Получается, пиксели уменьшаются, а их квантовая эффективность возрастает. То есть, современный маленький пиксель будет более светочувствительным, нежели крупный пиксель старого камерофона.
Но вернемся к нашим электронам на дне ямы. В момент, когда происходит снимок, каждый из миллионов пикселей на матрице начинает ловить фотоны и поглощать их, высвобождая при этом электроны, которые сваливаются в ловушки. Снимок сделан!
Теперь камере нужно просто подсчитать, какое количество электронов оказалось в потенциальной яме каждого пикселя. Чем больше этих электронов, тем ярче будет нарисована соответствующая этому пикселю точка на фотографии. Именно так свет превращается в картинку.
Маленький или большой пиксель — что лучше?
Предположим, у нас есть две матрицы одного физического размера. На первой из них размещено 12 миллионов крупных пикселей (12 Мп), а на второй — в несколько раз больше, но размером они поменьше.
И возникает вопрос — есть ли какая-то разница между этими матрицами? Ведь они обе имеют один и тот же физический размер, а пиксели покрывают всю площадь.
Я сразу хочу отбросить теорию о том, что между пикселями есть пространство и много света просто теряется, так как он не попадает на светочувствительный элемент. Да, пространство между пикселями действительно есть, кроме того, внутри самого пикселя далеко не вся поверхность — это светочувствительный кремний.
Однако над каждым пикселем установлена специальная микролинза, которая собирает весь свет и фокусирует его на кремний:
И если раньше даже между линзами были какие-то зазоры, то сейчас их нет вовсе и расстояние между пикселями не играет никакой роли.
Теперь давайте определимся с терминами. Размер одного пикселя практически всегда указывается в характеристиках любого смартфона. Если вы посмотрите на параметры камеры, которые я приводил вначале, то увидите, что размер пикселя там составляет 0.8 мкм (микрометра). Есть пиксели размером 1 мкм, есть и более крупные, например, 1.4 мкм и даже 1.8 мкм (в Samsung Galaxy S20 или Sony Xperia 1 II).
И здесь любой профессиональный фотограф скажет вам, что размер пикселя важнее их количества.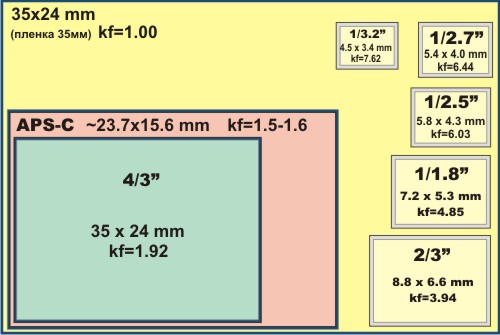 Почему? На это есть две причины.
Почему? На это есть две причины.
Когда мы делаем снимок, в ловушку попадают электроны. Естественно, потенциальная яма пикселя не резиновая и в зависимости от освещения очень быстро заполняется до отказа. Если снимок всё еще делается, новые электроны будут попадать в яму и сразу же «вываливаться» оттуда в специально отведенное место — эдакий дренаж.
Образное представление пикселяОдной из самых популярных мобильных матриц 2019-2020 гг является Sony IMX586. Она установлена в огромном количестве самых разных моделей от средне-бюджетного до премиального сегмента. В наших обзорах она также встречалась очень часто.
Так вот, размер пикселя этой матрицы составляет 0.8 микрометра, а емкость потенциальной ямы — минимум 4500 электронов. Если в ловушке уже оказалось 5000 электронов, а смартфон еще продолжает делать снимок, принимая новые фотоны света, этот пиксель будет переполнен и уже никакой информации, кроме яркой белой точки, в этом месте на снимке не будет.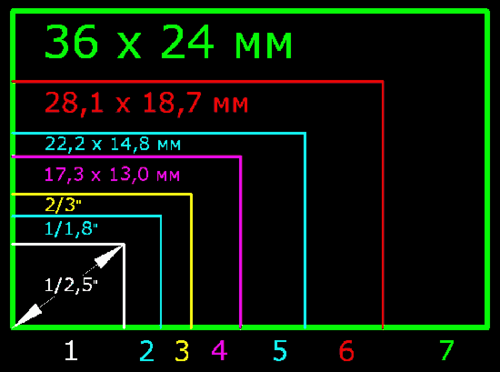
В другом популярном сенсоре от Samsung на 64 Мп (используется в Redmi Note 8/9 Pro, Galaxy S20, Galaxy Note20) емкость потенциальной ямы — 6000 электронов.
Для сравнения, емкость потенциальной ямы одного пикселя многих зеркальных камер составляет 25 тысяч электронов, что всего в 4-5 раз больше микроскопических пикселей (0.8 мкм) от Sony и Samsung.
Основная задача таких внушительных «ловушек» — обеспечить широчайший динамический диапазон. То есть, чтобы на снимке не было ни одной белой точки с потерянными деталями. Посмотрите на эти две фотографии с разным динамическим диапазоном:
Слева мы видим, как пиксели, отвечающие за цвет неба в правом углу и плитку на полу, не справились со своей задачей. Их ловушки электронов просто переполнились от огромного количества фотонов, прилетевших с неба и отразившихся от плитки. А вот на снимке справа у пикселей оказались достаточно глубокие ловушки, что позволило рассмотреть детали даже в самых светлых областях.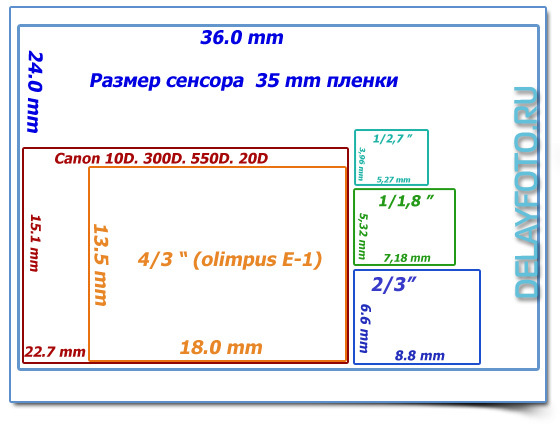
Но этой проблемы практически не существует сегодня в мире смартфонов. Дело в том, что ее научились компенсировать двумя способами:
- Вычислительная фотография. Смартфон делает серию снимков с разной выдержкой. То есть, во время первого снимка все пиксели собирают фотоны в течение, например, 5 миллисекунд. Этого времени не хватает, чтобы собрать достаточно фотонов с темных мест сцены, но пиксели, на которые попадают фотоны с ярких участков, не успевают переполняться и камера прекрасно видит все детали. Затем делается повторная фотография и пиксели собирают фотоны уже в течение 50 миллисекунд. Этого времени хватит, чтобы собрать фотоны с самых темных мест сцены, при этом произойдет переполнение потенциальных ям в пикселях светлых участков. Затем алгоритмы соединяют две фотографии, чтобы в результате не оказалось ни белых, ни черных точек.
- Объединение (биннинг) пикселей. Благодаря технологиям Tetracell и Quad Bayer мы можем сделать ровно то же, что было описано выше, только при помощи одного снимка.
 В таких матрицах пиксели собраны в группы по 4 штуки. Когда мы делаем снимок, два из них собирают фотоны, скажем, в течение 5 миллисекунд, а остальные — в течение 50 мс. Результат получается тот же.
В таких матрицах пиксели собраны в группы по 4 штуки. Когда мы делаем снимок, два из них собирают фотоны, скажем, в течение 5 миллисекунд, а остальные — в течение 50 мс. Результат получается тот же.
Выходит, даже маленькие пиксели по 0.8 мкм идеально справляются с динамическим диапазоном. Но, есть и другая проблема.
Ах эти грязные фотоны! Или откуда шум на снимках?Оказывается, на снимках откуда-то появляется непонятный шум! Особенно, когда света очень мало, на фотографиях по всей площади можно заметить характерные маленькие точки или отклонения яркости и цвета. Даже если мы сделаем снимок белого листа бумаги при плохом освещении, то получим такой грязный кадр:
Откуда берется эта грязь? И какое отношение к этому шуму имеет размер пикселя?
Этот мусор на матрицу приносят с собой фотоны. И дело совершенно не в том, что существуют нечистоплотные фотоны. Конечно нет. Всё дело в самой природе света.
Представьте, что на улице идет град и вы решили подсчитать, какое количество градин упадет в ведро за одну минуту. Чтобы увеличить точность эксперимента, вы решаете использовать сразу десять ведер. Итак, ведра расставлены — град идет. Проходит одна минута и вы делаете подсчет. Будет ли в каждом ведре одинаковое количество градин? Конечно же, нет! Любой человек ответит на этот вопрос и без каких-либо экспериментов.
Чтобы увеличить точность эксперимента, вы решаете использовать сразу десять ведер. Итак, ведра расставлены — град идет. Проходит одна минута и вы делаете подсчет. Будет ли в каждом ведре одинаковое количество градин? Конечно же, нет! Любой человек ответит на этот вопрос и без каких-либо экспериментов.
Ровно то же происходит и с фотонами! Если какой-то пиксель за одну секунду поймал 100 фотонов, то в следующую секунду их могло легко оказаться 70, а может и 120. Добавьте к этому еще тот факт, что не каждый фотон будет поглощен в кремнии.
В общем, это ровно такое же непредсказуемое явление, как и пример с градом. Но если градины ни на что не влияют, то вот количество фотонов, упавших на пиксель, напрямую влияет на яркость этого пикселя на итоговом снимке.
Если бы у нас была матрица только с одним гигантским пикселем и мы делали снимок белой стены каждую секунду, на такой фотографии не было бы никакого шума, просто цвет стены каждый раз немного бы отличался. Собрали больше фотонов — снимок ярче, меньше фотонов — темнее.
Но у нас-то пикселей миллионы! И здесь происходит интересная вещь. Несмотря на то, что мы делаем снимок белой стены, на один пиксель может попасть 80 фотонов, на пиксель рядом — 120, а еще на другой — 100.
В итоге мы получаем вместо однородного белого цвета какие-то пятна, точки и прочие артефакты. Это и есть фотонный шум, связанный с самой природой света, который невозможно никак ни отследить, ни предугадать.
Конечно, существуют и другие источники шума, но этот — основной.
Помните, вначале я говорил, что мы подаем небольшое питание на кусочек кремния, чтобы он мог ловить фотоны и преобразовывать их в электроны? Так вот, когда ни один фотон не попадает на такой пиксель, слабый ток из-за небольшого нагрева кремния вызывает ровно тот же эффект — генерацию электронов, а матрица собирает их и считает, что это были фотоны. Но для того, чтобы этот шум был хоть как-то заметен, нужны длинные выдержки и мало света. На смартфонах длинные выдержки — большая редкость.
Кроме того, сам процесс считывания электронов может вносить шум. Но, опять-таки, он просто ничтожен в случае со смартфонами, так как смартфоны используют CMOS-сенсоры, а этот шум характерен для CCD-сенсоров (ниже я расскажу об этом чуть подробнее).
Так причем здесь размер пикселя?Дело в том, что чем больше фотонов упадет на один пиксель, тем больше в нем появится электронов. А чем больше электронов, тем больше разница между шумом и реальной картиной. Когда мы говорим о шуме, нужно брать каждый пиксель, а не матрицу в целом.
Это очень просто понять даже интуитивно. Вот смотрите, если на все пиксели в среднем падает 9 фотонов, то мы можем легко посчитать уровень шума для всей матрицы. Согласно распределению Пуассона, шум — это просто квадратный корень из количества попавших на пиксель фотонов.
То есть, если в среднем пиксели ловят по 9 фотонов, значит шум всей матрицы — это квадратный корень из 9 или 3 фотона. На один пиксель упало 9 фотонов, на второй — 6, на третий — 10, на четвертый — 8 и так далее. Но в среднем, их количество отличается на +/- 3 фотона. Эта неравномерность и выльется в шум на снимке. И мы его прекрасно заметим, так как яркость точек на фотографии будет отличаться очень сильно (на 30% в среднем или на +/- 3 фотона на каждые 9 фотонов).
Но в среднем, их количество отличается на +/- 3 фотона. Эта неравномерность и выльется в шум на снимке. И мы его прекрасно заметим, так как яркость точек на фотографии будет отличаться очень сильно (на 30% в среднем или на +/- 3 фотона на каждые 9 фотонов).
Но что произойдет, если пикселей будет в 4 раза меньше и они будут в 4 раза крупнее? Каждый пиксель будет собирать в среднем уже не по 9, а по 36 фотонов. И шум матрицы составит 6 фотонов (корень из 36).
Большие пиксели (слева) против маленьких (справа)Теперь разница в яркости между точками будет отличаться не более, чем на 16% (+/-6 фотонов на каждые 36 фотонов). Мы ничего, кроме размера пикселя, не изменили. Но фотография стала в 2 раза чище.
То есть, мы видим закономерность, что с увеличением количества фотонов, шум становится совершенно незначительным (относительно общего числа фотонов). Им можно пренебречь. Для 100 фотонов шум составит 10 фотонов. Если же увеличить количество фотонов в 100 раз, чтобы их было 10 тысяч, то шум возрастет только в 10 раз (корень из 10 тысяч = 100). И сигнал будет еще чище.
И сигнал будет еще чище.
Получается, нам важно, чтобы как можно больше фотонов падало на один пиксель. Даже если на матрицу упало 1000 фотонов, лучше, чтобы пикселей было всего 10, тогда на каждый из них попадет в среднем по 100 фотонов. А если пикселей будет 100 (при том же размере матрицы), на каждый из них в среднем попадет по 10 фотонов. В первом случае шум будет едва заметен, так как яркость точек будет отличаться незначительно (+/- 10 фотонов на каждые 100 фотонов), а во втором случае — гораздо сильнее (+/- 3 фотона на каждые 10 фотонов).
Именно по этой причине большие пиксели меньше «шумят», чем маленькие (при одинаковом размере матрицы). У них соотношение сигнала (количества фотонов) к шуму (погрешности) гораздо выше.
И здесь я снова должен сказать «но»…
Но ведь у нас есть Quad Bayer и даже Nonacell!
Производители смартфонов нашли элегантное решение этой проблемы. Все современные матрицы смартфонов с размером пикселя <1 мкм сделаны так, чтобы под одним цветным фильтром размещались 4 отдельных фотодиода (кусочка кремния, реагирующего на свет). А, к примеру, Samsung решила объединить под одним «колпаком» сразу 9 пикселей (в Galaxy Note 20 Ultra и Galaxy S20 Ultra).
А, к примеру, Samsung решила объединить под одним «колпаком» сразу 9 пикселей (в Galaxy Note 20 Ultra и Galaxy S20 Ultra).
С одной стороны мы, конечно, теряем значительную часть информации о цвете (ведь в 108 Мп Nonacell-камере только 12 млн цветных фильтров). Но с другой, мы имеем полноценное представление о яркости каждой из 108 млн точек.
И здесь есть один интересный и важный нюанс. Существует два основных типа матриц: CMOS и CCD. Все смартфоны, за редчайшим исключением, используют CMOS-сенсоры, так как у них масса преимуществ.
Одним из таких преимуществ является тот факт, что считывание и усиление сигнала с каждого пикселя происходит непосредственно внутри каждого из них. То есть, помимо светочувствительного элемента, внутри каждого пикселя есть еще и транзисторы. А в CCD-матрицах нет активных схем, так как накопленный заряд построчно переносится в отдельное место за пределы матрицы, где затем и обрабатывается (считывается, усиливается).
Так вот, когда мы говорим об объединении пикселей, в CCD-сенсорах это реальное физическое объединение заряда еще до считывания. При таком объединении мы просто складываем фотоны, а значение шума оставляем прежним.
При таком объединении мы просто складываем фотоны, а значение шума оставляем прежним.
Пример биннинга на CCD-матрице
Если на каждый маленький пиксель попадает 49 фотонов, значит шум равняется 7 фотонам (квадратный корень из 49). И соотношение сигнала к шуму равняется 49/7. Когда мы объединяем пиксели на CCD-сенсоре, то просто складываем фотоны. Теперь количество фотонов на одном «супер-пикселе» составляет 196 (49+49+49+49), но шум остался прежним — 7 фотонов. Соотношение сигнал/шум теперь равняется 196/7 против 49/7, а значит, уровень шума снизился значительно.
Пример биннинга на CMOS-матрице
Но со смартфонами (матрицы Quad Bayer и Tetracell) дела обстоят похуже. Здесь мы не можем ничего объединить, пока не считаем информацию с каждого пикселя. Поэтому работает это так. Мы суммируем количество фотонов с 4 пикселей (49+49+49+49), а затем вычисляем общий шум, извлекая квадратный корень из суммы.
В нашем примере до объединения пикселей шум равнялся 7 фотонам (квадратный корень из 49). Но теперь шум будет составлять квадратный корень из общего числа (196), то есть 14 фотонов.
Но теперь шум будет составлять квадратный корень из общего числа (196), то есть 14 фотонов.
Получается, мы увеличили количество фотонов в 4 раза (49 против 196 фотонов), а шум при этом возрос только в 2 раза (7 против 14 фотонов). То есть, соотношение сигнал/шум выросло в 2 раза.
А если говорить о Nonacell-матрице, там, при объединении пикселей, сигнал возрастает в 9 раз, а шум — в 3 раза. Значит и соотношение сигнал/шум увеличивается также в 3 раза.
Вот таким интересным образом современные смартфоны, несмотря на очень маленькие размеры пикселей, могут показывать хорошие результаты.
Размер матрицы камеры смартфона (не) имеет значения!
До этого момента у вас должно было сложиться впечатление, что размер матрицы не играет никакой роли, так как главное — это размер пикселя и всех связанных с ним характеристик (размер светочувствительной области пикселя, емкость потенциальной ямы, квантовая эффективность).
Если говорить формально, так и есть. Я даже выделю эти слова, чтобы они громче прозвучали:
Размер матрицы сам по себе не оказывает никакого влияния на качество фотографий!
Я понимаю, что эти слова «противоречат» опыту миллионов фотографов. Я сам прекрасно помню, как сменил свою кропнутую зеркалку на полнокадровый фотоаппарат (Canon EOS 5D Mark 2). Разница была просто колоссальной! Камера лучше справлялась при недостаточном освещении, да и с художественной точки зрения снимки выглядели намного интереснее.
Именно из-за личного опыта миллионов фотографов в сети и появились такие заблуждения, как:
- Более крупная матрица сильнее размывает фон на снимках
- Более крупная матрица уменьшает количество шума на снимках и позволяет снимать при худших условиях освещения
- Более крупная матрица добавляет глубину и объем в кадр
А теперь подумайте. Вот перед вами два человека: один с пустыми руками, а второй с большой сумкой. Кто из них сможет унести, скажем, больше конфет? Естественно, всё зависит от того, сколько конфет вообще имеется в наличии. Если вы дадите каждому по две конфеты, ни размер сумки, ни ее наличие не сыграют никакой роли.
Кто из них сможет унести, скажем, больше конфет? Естественно, всё зависит от того, сколько конфет вообще имеется в наличии. Если вы дадите каждому по две конфеты, ни размер сумки, ни ее наличие не сыграют никакой роли.
Ровно то же и с матрицами. Совершенно не важно, какого размера матрица, если в объективы двух камер залетает одинаковое количество фотонов. Даже если вы каким-то образом сможете заменить маленькую матрицу смартфона с диагональю 7 мм, на огромную матрицу с диагональю 70 мм, ничего не изменится. Ни количество шума, ни размытие заднего плана, ни светочувствительность. Так как на обе матрицы будет попадать идентичное количество фотонов.
Но почему же опыт говорит об обратном? Многие люди просто путают причину и следствие. Всё дело в диаметре отверстия, через которое свет проникает внутрь камеры. Это и есть важнейший параметр любой камеры смартфона. Именно так просто:
Чем больше диаметр отверстия в камере, тем лучше ее характеристики (светочувствительность, соотношение сигнал/шум, глубина резкости)
А размер матрицы — это лишь следствие. Вот смотрите. Предположим, что у нас есть смартфон с маленькой матрицей и крохотным диаметром входного зрачка объектива (отверстия, через которое свет попадает в камеру):
Вот смотрите. Предположим, что у нас есть смартфон с маленькой матрицей и крохотным диаметром входного зрачка объектива (отверстия, через которое свет попадает в камеру):
Что произойдет, если мы просто заменим маленькую матрицу на более крупную? На самом деле — ничего:
Мы будем получать фотографии с огромными черными рамками вокруг, так как линза проецирует такое же пятно света, как и раньше. Если мы хотим полностью задействовать весь сенсор, не меняя при этом угла обзора, нам нужно увеличить фокусное расстояние объектива, то есть, отодвинуть линзы подальше от сенсора:
Теперь фотоны падают на весь сенсор, а так как он гораздо крупнее, то и фотонов ловит больше. Верно? Нет, конечно.
Свет теперь покрывает весь сенсор, но интенсивность этого света упала (на картинке желтый цвет стал менее насыщенным), то есть, теперь на каждый условный квадратный миллиметр попадает меньше фотонов, чем раньше, так как нам пришлось заполнить тем же количеством фотонов большую площадь матрицы. Общее количество фотонов не возросло, так как диаметр отверстия остался прежним.
Это как фонарик: чем более узконаправленно он светит, тем ярче пятно света (выше интенсивность света).
Выходит, мы заменили маленький сенсор на большой, поставили другой объектив с более длинным фокусным расстоянием, но это никак не повлияло на качество снимков. Хотя кое-что уже изменилось в дизайне смартфона!
Так как нам пришлось увеличить фокусное расстояние, то есть, отодвинуть линзы подальше от сенсора, теперь объектив заметно выступает над корпусом. Вспомните Galaxy Note 20 Ultra:
Чтобы от всей проделанной нами работы был какой-то смысл, единственное, что еще остается сделать — это увеличить диаметр отверстия объектива. Вот теперь все звезды сошлись! В камеру попадает больше фотонов, интенсивность света увеличивается, а так как матрица крупная, то и каждый пиксель этой матрицы более крупный (или работает в режиме объединения пикселей), что приводит к более высокому качеству изображения.
Другими словами, сам по себе размер матрицы ничего не решает. Но именно с более крупными матрицами используют и объективы с большим диаметром отверстия, чтобы обеспечить соразмерное количество света. А это уже меняет всё.
Можно сделать такой вывод: если в смартфоне используется более крупная матрица, тогда диаметр входного зрачка объектива, скорее всего, также крупнее. Кроме того, выступ камеры над корпусом может косвенно свидетельствовать о том, что внутри установлен более крупный сенсор и компании пришлось отодвигать линзы подальше, чтобы компенсировать размер.
Неправильные дюймы. Или как узнать реальный размер матрицы в смартфоне?Но как посчитать размер матрицы? Что означают цифры 1/2.55″ или 1/1.33″ в характеристиках смартфонов? Возможно, для кого-то это прозвучит странно, но такая маркировка используется производителями лишь по одной банальной причине — скрыть реальный размер матрицы, запутав пользователя.
Когда мы видим число с двойным штрихом, то понимаем, что это дюймы. А в одном дюйме — 25.4 мм. Если бы диагональ матрицы составляла 2″, мы бы легко перевели это в миллиметры, умножив 2 на 25.4 и получив 50.8 мм.
Было бы логичным предположить, что, если диагональ матрицы указана, как 1/1.33″, то нужно просто единицу разделить на 1.33, а потом умножить на 25.4 и мы получим диагональ в миллиметрах: 1 / 1.33 * 25.4 = 19 мм. Но в реальности матрица 1/1.33″ имеет диагональ 12 мм! Как же так?
Все дело в том, что производители используют не обычные дюймы, а видиконовские. Лет 70 назад были популярными телевизионные камеры с электронно-лучевыми трубками внутри. Работали они примерно, как и ЭЛТ-телевизоры. В трубке была маленькая мишень — аналог матрицы современного смартфона, и в эту матрицу выстреливались электроны.
Так вот, если диаметр трубки равнялся одному дюйму, то размер самой мишени («матрицы») внутри составлял 2/3 от диаметра трубки. Соответственно, в дюймовой трубке (25.4 мм) находилась мишень с диагональю 16.93 мм (25.4*2/3).
Соответственно, в дюймовой трубке (25.4 мм) находилась мишень с диагональю 16.93 мм (25.4*2/3).
«Это же просто отличный способ маркировать современные прямоугольные матрицы!» — подумали производители и стали вместо человеческих миллиметров и дюймов использовать видиконовские дюймы, о которых еще помнят 10 человек, заставших 50-е годы прошлого столетия.
Получается, чтобы примерно высчитать диагональ матрицы в миллиметрах, нужно умножать полученное значение не на 25.4 мм (обычный дюйм), а на 16.93 (видиконовский дюйм). Теперь можно легко посчитать размер упомянутой выше матрицы: 1 / 1.33 * 16.93 = 12.7 мм.
Повторю еще раз. Когда вы видите в характеристиках смартфона размер матрицы, скажем, 1/3.2″, нужно просто единицу разделить на 3.2, а затем полученное число умножить на 16.93. Вот вам и диагональ в привычных миллиметрах!
Делаем выводы
Качество камер современных смартфонов возросло очень сильно при том, что размеры одного пикселя продолжают уменьшаться. Так что, маленький пиксель — это не приговор.
Так что, маленький пиксель — это не приговор.
Производители постоянно работают над тем, чтобы как можно больше фотонов попадало на один пиксель. Для этого улучшаются материалы цветных фильтров и линз, чтобы они блокировали как можно меньше света. Внутри одного пикселя сокращаются размеры транзисторов и увеличивается площадь светочувствительного элемента (того самого кусочка кремния).
Новые технологии изоляции пикселей (DTI и F-DTI) позволили значительно сократить их размеры без ущерба качеству, а ведь раньше это приводило к тому, что электроны из одного пикселя могли спокойно перескакивать на соседние:
Но, как вы заметили, с уменьшением пикселя, уменьшался и светочувствительный элемент, а значит и емкость его потенциальной ямы. Эту проблему решили другие технологии, в частности VTG (Vertical Transfer Gate), которая позволила размещать фотодиод внутри пикселя над другими компонентами, а не рядом с ними:
В итоге, пиксель всё уменьшался, а его светосила — увеличивалась.
И в этой связи довольно забавно читать, как многие люди на форумах с грустью вспоминают старые-добрые времена, когда пиксели в смартфонах еще были большими, а не то, что эти модные 0.8 мкм.
Но в действительности, современные маленькие пиксели захватывают больше света, чем старые крупные, так как технологии с тех пор очень сильно ушли вперед и матрицы стали намного качественнее именно с точки зрения физики. Не говоря уже об алгоритмах, нейросетях и машинном обучении.
20 лет назад все говорили, что невозможно нарушить законы физики и телефоны никогда не смогут заменить фотоаппарат. Но проблема оказалась не в законах физики, а в несовершенстве технологий. Физика со своими законами осталась там же, где и была 20 или 2000 лет назад, но технологии продолжают показывать экспоненциальный рост, о чем, собственно, у меня есть отдельная интересная статья…
Позвольте еще раз привести характеристики камеры случайно выбранного смартфона:
- Основная камера: 108 Мп, 1/1.
 33″, f/1.8, 26 мм, 0.8 мкм, PDAF, OIS
33″, f/1.8, 26 мм, 0.8 мкм, PDAF, OIS
Теперь все эти цифры и буквы не должны вас пугать, так как мы подробно разобрались буквально с каждым параметром, за исключением PDAF и OIS. Но об этом поговорим в другой раз!
Алексей, глав. редактор Deep-Review
P.S. Мы открыли Telegram-канал и сейчас готовим для публикации очень интересные материалы! Подписывайтесь в Telegram на первый научно-популярный сайт о смартфонах и технологиях, чтобы ничего не пропустить!
Понравилась статья? Поделитесь с другими:
Матрицы камер видеонаблюдения
В видеокамерах исторически использовалось два основных вида матриц – CCD (Charge-Coupled Device — Прибор с Зарядовой Связью) и CMOS (Complementary-symmetry/Metal-Oxide Semiconductor — комплементарная структура металл-оксид-полупроводник).
На сегодняшний день в камерах, в основном, используются
матрицы CMOS.
Зачастую производители камер не раскрывают информацию об
используемых матрицах. Иногда производитель матрицы для данной камеры известен,
но, с учетом того, что данный производитель выпускает десятки различных матриц
– остается неизвестным, какой тип матрицы установлен в данной камере. И даже
если известно, что в двух данных камерах используются одинаковые матрицы, то
все равно могут существовать различия в качественных характеристиках этих камер
из-за разницы в настройке, кодировании и т.д.
Иногда производитель матрицы для данной камеры известен,
но, с учетом того, что данный производитель выпускает десятки различных матриц
– остается неизвестным, какой тип матрицы установлен в данной камере. И даже
если известно, что в двух данных камерах используются одинаковые матрицы, то
все равно могут существовать различия в качественных характеристиках этих камер
из-за разницы в настройке, кодировании и т.д.
Разрешение матрицы
Матрицы различаются по поддерживаемому ими максимальному разрешению.
Есть матрицы с максимальным разрешением VGA, 1,3М, 2М, 3М, 5М и т.д.
Размеры матрицы
Матрицы бывают различных размеров, в зависимости от устройства, в которое они устанавливаются. Например, в цифровом зеркальном фотоаппарате матрица существенно крупнее, чем в сотовом телефоне.
В камерах видеонаблюдения 95% матриц имеет размеры между 1/2”
и 1/4”. Наиболее распространенные размеры матриц– 1/3”, 1/2,7″ и 1/2. 8 «. За
последние несколько лет средний размер матрицы постепенно увеличивался. По мере
увеличения разрешений камер 3MP, 4MP, 5MP, 4K и т. д. все более
распространенными становились размеры матрицы 1/3 «.
8 «. За
последние несколько лет средний размер матрицы постепенно увеличивался. По мере
увеличения разрешений камер 3MP, 4MP, 5MP, 4K и т. д. все более
распространенными становились размеры матрицы 1/3 «.
Наиболее важным последним изменением в технологии создания и внедрения матриц видеокамер является использование матрицы 1/2 «для камер 1080p. Многие производители теперь имеют в линейке выпускаемых камер, по крайней мере, одну профессиональную модель с матрицей около 1/2 » (1/1,8″, 1/1,9 «и т.д.), предназначенную для работы при очень низкой освещенности.
Размеры пикселя матрицы
Также, матрицы различаются по размеру их пикселей, выраженному в микронах.
Размер
пикселя зависит от размера матрицы и
количества пикселей в матрице, т.е. от разрешения. Чем больше размер
матрицы, тем, при прочих равных условиях, больше размер пикселя. Однако, если
добавить в матрицу больше пикселей при том же размере этой матрицы, то размер
пикселя уменьшится, как показано в таблице.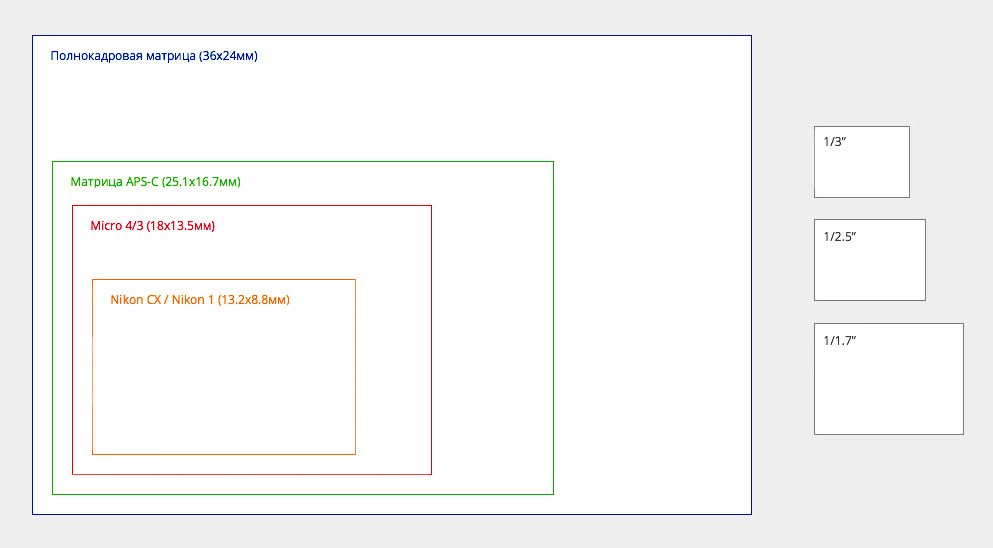
Размер матрицы | 1/4 « | 1/3 « | 1/3 « | 1/4 « | 1/3 « | 1/3 « | 1/2,5 « |
| Разрешение | VGA | 1,2MP | 1,2MP | 1,1MP | 3,5MP | 3,1MP | 5MP |
Размер пикселя | 5,6 мкм | 3,75 мкм | 3,75 мкм | 3,0 мкм | 2,2 мкм | 2,2 мкм | 2,2 мкм |
Многие предпочитают более крупные размеры пикселей, потому что, при прочих равных условиях, пиксель большего размера может аккумулировать больший световой поток и, следовательно, лучше воспроизводить слабо освещенные сцены. Однако есть и другие факторы, влияющие на низкую светоотдачу, поэтому нельзя утверждать, что одна камера лучше другой только на основе размера пикселя.
Кроме того, размер пикселей почти никогда не раскрывается
производителями камер, поэтому лучше всего оценивать качество камеры по ее
разрешению и размеру используемой матрицы.
Размер пикселя матрицы 4K
4K камеры становятся все более распространенными. Хотя они имеют в 4 раза больше пикселей, чем 2МР камеры, а размеры матрицы в таких камерах существенно больше, чем 1080Р – все равно, размер пикселей в камерах 4К получается меньше, чем в камерах 1080p. Это плохо для обработки сцен с низкой освещенностью. Второй проблемой 4К камер, как будет объяснено ниже, являются ограничения в скорости обработки изображения.
Размер матрицы и величина угла обзора камеры.
Размер матрицы не сильно влияет на угол обзора камеры.Первичное
влияние оказывает размер линзы (3 мм, 10 мм, 30 мм и т. д.) Тем не менее, чем
больше размер матрицы, при прочих равных условиях, тем больше угол обзора. С
другой стороны, размеры матриц, используемых в камерах видеонаблюдения, отличаются
не существенно. Соответственно, для
матрицы 1/2 » величина угла обзора камеры составит 86°, а для матрицы 1/3″ -
величина угла обзора составит 77°.
Матрица и кодеки
Матрицы не имеют ничего общего с сжатием видео (то есть H.264, MJPEG, и т.д.). Матрица, отправляет видео без сжатия в кодек для последующего кодирования.
Матрица и производительность при низкой освещенности.
Не совсем правильно утверждение, что матрица большего размера обеспечит лучшую передачу сцен с низкой освещенностью. Отчасти это так, но есть и другие, более сильно влияющие факторы, например, скорость обработки изображения с низкой освещенностью, которая выполняется кодеком и процессором камеры. Лучшее управление усилением камеры, устранение шумов изображения и другие процессы по обработке изображения в большей степени достигаются увеличением производительности процессора, чем увеличением размера матрицы.
Влияние размера матрицы на ее характеристики
Наш читатель, Александр Хлупнов, поделился своим мнением о влиянии размера сенсора фотокамеры на ее характеристики.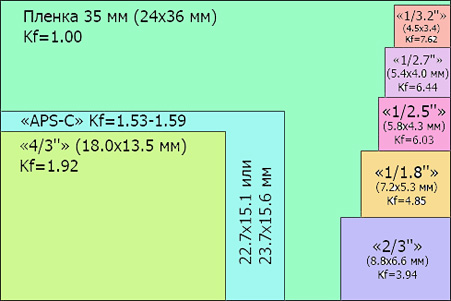 Спасибо, Александр, публикуем вашу статью.
Спасибо, Александр, публикуем вашу статью.
Хотим мы, или нет, но фотоаппарат необходим для регистрации информации, т.е. памяти о каком либо событии. Количественной мерой информации может служить объем фотографии в Мрiх (мегапикселях). Очевидно, чем больший объем информации, тем она ценнее. Для цифровой фотографии объем информации определяется размером матрицы. Качество фотографии зависит от ряда технических характеристик матрицы, таких как глубина цвета (бит), динамический диапазон (ЕВС) и чувствительность ISO (low-light ISO). Наиболее полная характеристика матриц цифровых фотоаппаратов приведена на сайте независимой лаборатории DxOMark. Выберем для примера характеристики некоторых зеркальных фотоаппаратов фирмы Nikon, которые лучше знакомы автору статьи. Это, конечно, профессиональные полнокадровые и аппараты с «кропнутой» матрицей. Для полноты анализа в этой таблице приведены сведения и о некоторых фотоаппаратах фирмы Canon. Приведенная таблица содержит такие данные матриц фотоаппаратов, как разрешение в Мрiк, начальной цене, годе выпуска, общей оценки матрицы на сайте DxOMark, глубине цвета (бит), динамическом диапазоне (ЕВС), чувствительности в ISO (low-light ISO).
Анализ приведенных данных показывает, что у всех рассматриваемых фотоаппаратов, приблизительно, одинаковые значения глубины цвета и динамического диапазона. Фотоаппараты с полнокадровой матрицей имеют выше чувствительность в ISO. Анализ матриц современных зеркальных фотоаппаратов показывает, что у полнокадровых аппаратов при числе ячеек 46 Мрix (D850) размер ячейки составляет 4,35 мкм, что соизмеримо с ячейкой «кропнутой» матрицы 24 Мрix (D7200) – 3,92 мкм. Следовательно, учитывая эти геометрические размеры ячеек матриц, можно сделать вывод о том, что диапазон чувствительности матриц рассматриваемых фотоаппаратов во многом определяется электронным обеспечением фотоаппарата.
Для сравнения влияния размера матрицы на качество фотографии выберем зеркальные камеры с матрицами 24 Мрix, например, D750 и D7200. В этом случае качество фотографии не будет зависеть от размера матрицы, а будет определяться только техническими характеристиками как матрицы, так и фотоаппарата. Из данных таблицы 1 можно сделать вывод, что эти параметры близки.
Из данных таблицы 1 можно сделать вывод, что эти параметры близки.
Таблица 1. Матрицы фотоаппаратов
|
Модель фотокамеры |
Мрiх |
Цена |
Дата выпуска |
Оценка DxOMark |
Бит |
ЕВС |
ISO |
|
Nikon D850 |
45,7 |
$3300 |
08.2017 |
100 |
26,4 |
14,8 |
2660 |
|
Canon EOS 50 Ds |
50,6 |
$3700 |
02.2015 |
87 |
24,7 |
12,4 |
2381 |
|
Nikon D810 |
36,3 |
$3300 |
06,2014 |
97 |
25,7 |
14,8 |
2853 |
|
Nikon D750 |
24,3 |
$2300 |
09,2014 |
93 |
24,8 |
14,5 |
2956 |
|
Nikon D5 |
20,8 |
$6500 |
01,2016 |
88 |
25,1 |
12,3 |
2434 |
|
Nikon D700 |
12,1 |
$2699 |
07,2008 |
80 |
23,5 |
12,2 |
2290 |
|
Canon EOS 6D |
20,2 |
$2099 |
09,2012 |
82 |
23,2 |
11,8 |
2786 |
|
Nikon D7200 |
24,2 |
$1200 |
03,2015 |
87 |
24,5 |
14,6 |
1333 |
|
Nikon 1 V1 |
10,1 |
$1000 |
09,2011 |
54 |
21,3 |
11,0 |
346 |
|
Nikon D3400 |
24,2 |
$650 |
08,2016 |
86 |
24,8 |
13,9 |
1192 |
|
Nikon D500 |
20,9 |
$2000 |
01,2016 |
84 |
24,1 |
14,0 |
1324 |
|
Canon EOS 80D |
24,2 |
$1200 |
02,2016 |
79 |
23,6 |
13,3 |
1135 |
Дальнейшее сравнение требует рассмотрение системы «матрица + объектив». Для корректного анализа возьмем характеристики объективов фирмы Nikon (Nikkor), приведенные на сайте DxOMark. При выборе объективов необходимо учитывать, что для сохранения неизменным объема регистрируемой информации требуется соблюдать угол обзора объектива, т.е. для аппаратов Nikon с «кропнутой» матрицей, фокусное расстояние объективов должно быть в 1,5 раза меньше, чем у полнокадровой матрицы. Обычно штатный объектив для аппарата с полнокадровой матрицей 50 мм, а эвивалентный ему штатный объектив для аппарата с «кропнутой» матрицей уже 35 мм. Если использовать зумы, то для полнокадровых матриц применяются штатные объективы 24-70 мм, 24-85 мм, 24-120 мм, а соответствующие им для «кропнутой» матрице 18-55 мм, 16-80 мм, 16-85 мм. Конечно, есть и другие объективы, но для примера выберем ниболее доступные и менее дорогие. Для характеристики объектива приводится общая оценка сайта, начальная цена, год выпуска, резкость в Мрiх, передача Тстор, мскажения %, виньетирование ЭВ, КГИ аберрация в мкм.
Для корректного анализа возьмем характеристики объективов фирмы Nikon (Nikkor), приведенные на сайте DxOMark. При выборе объективов необходимо учитывать, что для сохранения неизменным объема регистрируемой информации требуется соблюдать угол обзора объектива, т.е. для аппаратов Nikon с «кропнутой» матрицей, фокусное расстояние объективов должно быть в 1,5 раза меньше, чем у полнокадровой матрицы. Обычно штатный объектив для аппарата с полнокадровой матрицей 50 мм, а эвивалентный ему штатный объектив для аппарата с «кропнутой» матрицей уже 35 мм. Если использовать зумы, то для полнокадровых матриц применяются штатные объективы 24-70 мм, 24-85 мм, 24-120 мм, а соответствующие им для «кропнутой» матрице 18-55 мм, 16-80 мм, 16-85 мм. Конечно, есть и другие объективы, но для примера выберем ниболее доступные и менее дорогие. Для характеристики объектива приводится общая оценка сайта, начальная цена, год выпуска, резкость в Мрiх, передача Тстор, мскажения %, виньетирование ЭВ, КГИ аберрация в мкм. Наиболее важной для анализа является резкость объектива в Мрiх, т.к. этот параметр определяет объем информации, которая с помощью объектива передаётся на матрицу фотоаппарата. Остальные характеристики определяют качество передаваемой информации и при анализе могут не учитываться. Так как характеристики объективов зависят от параметров матрицы фотоаппарата, то в этой таблице указано, каким фотоаппаратом получены эти данные.
Наиболее важной для анализа является резкость объектива в Мрiх, т.к. этот параметр определяет объем информации, которая с помощью объектива передаётся на матрицу фотоаппарата. Остальные характеристики определяют качество передаваемой информации и при анализе могут не учитываться. Так как характеристики объективов зависят от параметров матрицы фотоаппарата, то в этой таблице указано, каким фотоаппаратом получены эти данные.
Таблица 2. Характеристики объективов
|
Объектив |
Цена |
Дата выпуска |
Оценка DxOMark |
Мрiх |
Камера |
|
AF Nikkor 50mm f/1.4D |
$329 |
06.1995 |
37 |
22 |
D800E |
|
AF Nikkor 50mm f/1.4D |
$329 |
06.1995 |
27 |
15 |
D500 |
|
AF Nikkor 50mm f/1. |
$134 |
02.2002 |
32 |
24 |
D800E |
|
AF Nikkor 50mm f/1.8D |
$134 |
02.2002 |
22 |
11 |
D500 |
|
AF Nikkor 50mm f/1.8D |
$134 |
02.2002 |
29 |
19 |
D750 |
|
AF Nikkor 50mm f/1.8D |
$134 |
02.2002 |
21 |
10 |
D700 |
|
AF-S Nikkor 24-70mm f/2.8 G ED |
$1800 |
08.2007 |
30 |
21 |
D800E |
|
AF-S Nikkor 24-85mm f/3.5-4.5 G ED VR |
$599 |
06.2012 |
24 |
17 |
D800E |
|
AF-S DX Nikkor 35mm f/1. |
$195 |
03.2009 |
28 |
10 |
D500 |
|
AF-S DX Nikkor 16-85mm f/3.5-5.6 G ED VR |
$630 |
01.2008 |
19 |
8 |
D500 |
|
AF-S DX Nikkor 18-55mm f/3.5-5.6 G VR |
$185 |
11.2007 |
17 |
8 |
D500 |
|
Nikon 1 Nikkor 18.5mm f/1.8 |
$187 |
09.2012 |
13 |
6 |
Nikon 1 V1 |
 8D
8D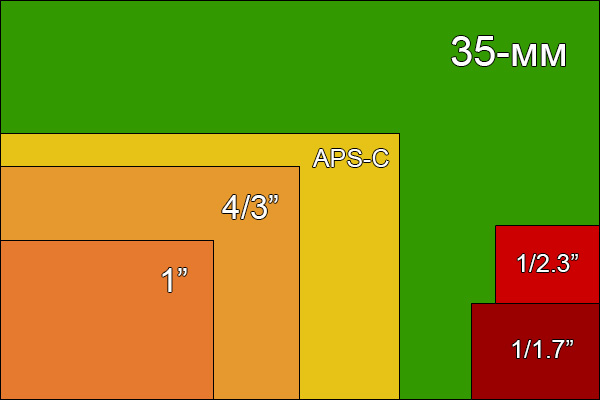 8 G
8 GСравним снимки, выполненные фотоаппаратом Nikon D750 с объективом Nikkor 50mm f/1.8D и фотоаппаратом D7200 с объективом 35mm f/1.8G. У фотоаппарата D750 разрешение снимка будет в этом случае 19 Мрiх. Для фотоаппарата D7200 с разрешением матрицы 24,3 Мрiх, разрешение объектива 35mm f/1.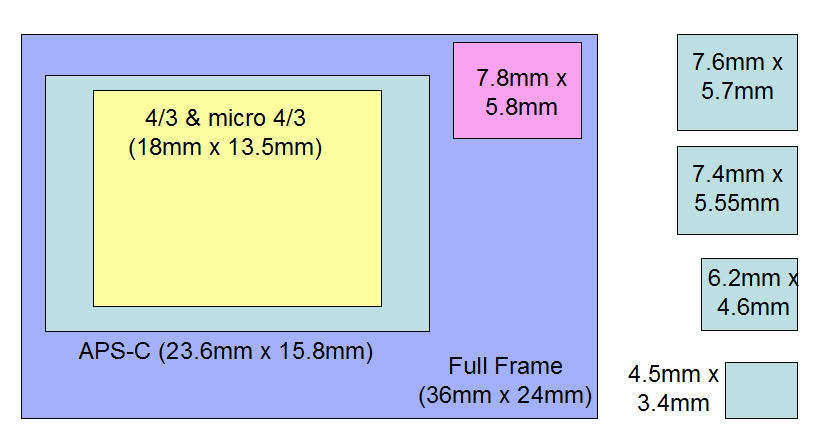 8 будет чуть выше, чем у D500, у которого матрица с разрешением 20.9 Мрiх, и может быть принята 11 Мрiх. В результате этого анализа получаем, что на фотоаппаратах с одинаковым разрешением матрицы 24 Мрiх при съёмке на полнокадровой и «кропнутой» матрицах одинаковой области пространства получаем снимки с разным разрешением. Для полнокадровой матрицы, т.е. D750 разрешение 19 Мрiх, а у D7200 – с «кропнутой» — 11 Мрiх.
8 будет чуть выше, чем у D500, у которого матрица с разрешением 20.9 Мрiх, и может быть принята 11 Мрiх. В результате этого анализа получаем, что на фотоаппаратах с одинаковым разрешением матрицы 24 Мрiх при съёмке на полнокадровой и «кропнутой» матрицах одинаковой области пространства получаем снимки с разным разрешением. Для полнокадровой матрицы, т.е. D750 разрешение 19 Мрiх, а у D7200 – с «кропнутой» — 11 Мрiх.
Подобный анализ можно провести для других объективов и матриц цифровых фотоаппаратов, используя данные DxOMark.
Рассмотрим беззеркальный фотоаппарат (можно сказать квазизеркальный) Nikon 1 V1 с матрицей в 1 дюйм. Объектив 18,5 мм эквивалентен 50 мм на полный кадр (множитель 2,7). Разрешение этого объектива из таблицы 2 – 6 Мрiх, т.е. существенно меньше, чем у фотоаппарата D700 с объективом 50mm (10 Мрiх). Ещё больше разница будет, если применить штатный зум 10-30mm, у которого разрешение всего 3 Мpix.
Съемка аппаратом с «кропнутой», т.е. меньшей по размерам матрицей, приводит к существенному уменьшению объёма получаемой информации по сравнение с полнокадровой матрицей, и как следствие, к ухудшению качества снимка.
Для современных фотоаппаратов с полнокадровыми матрицами постоянно выпускаются новые объективы с увеличенным разрешением, что позволяет увеличить объем получаемой информации, т.е. качества фотографий.
Надеюсь, что приведенный анализ, базирующийся на объективных технических характеристиках, поможет однозначно решить вопрос о том, какой цифровой фотоаппарат лучше, с полнокадровой или «кропнутой» матрицей, или сделать более широкий вывод, о том, что объем информации увеличивается при росте размеров матрицы.
Мегапиксели или размер матрицы? Что важнее в камере смартфона — Чат — Mi Community
Обложка
Изменить* Рекомендуется загружать изображения для обложки с разрешением 720*312
Описание темы
Mi фаны, здравствуйте! Котяш, как всегда, с вами. Недавно началась "мегапиксельная война", и кажется, что наш рынок смартфонов наводнен всем этим. Я взял в августе Mi 9T с 48-МП сенсором и я ходил такой весь из себя на понтах! А потом прихожу домой включаю телевизор и там говорят: "Аншлаг, вы слушали Маяк, любезный! Для всех тех, кто купил камеру на 48 МП, прекрасная новость — у нас вышла камера на 64 МП!" Это заставило меня задуматься — может ли камера с большим количеством мегапикселей создавать изображения с лучшим качеством? Или другие компоненты, такие как размер сенсора, линзы или пиксельное расстояние играют гораздо большую роль. Итак, давайте обсудим, что является более важным компонентом в камере смартфона: мегапиксели или размер сенсора? И стоит ли ходить по улице в очках, на которых написано "У меня 108 МП"… Погнали!МЕГАПИКСЕЛИ Мегапиксель в равен одному миллиону пикселей (Капитан Очевидность всегда с вами). Проще говоря, 5-мегапиксельная камера может захватывать 5 миллионов пикселей. Слово «пиксель» состоит из комбинации слов и изображений. Каждый пиксель в камере захватывает свет и превращает его в данные, а затем эти данные используются для воссоздания изображения. Очень многие считают, что чем больше пикселей — тем лучше изображение, но это не так. Данные, которые они собирают, являются как хорошей, так и плохой информацией. Что означает термин "плохая информация"? К этому относятся шумы, низкая насыщенность цвета и небольшая экспозиция и так далее. Но вопрос "Чем больше мегапикселей — тем лучше?" остается открытым. Давайте возьмем пример 12-мегапиксельной и 16-мегапиксельной камеры телефона.
Итак, давайте обсудим, что является более важным компонентом в камере смартфона: мегапиксели или размер сенсора? И стоит ли ходить по улице в очках, на которых написано "У меня 108 МП"… Погнали!МЕГАПИКСЕЛИ Мегапиксель в равен одному миллиону пикселей (Капитан Очевидность всегда с вами). Проще говоря, 5-мегапиксельная камера может захватывать 5 миллионов пикселей. Слово «пиксель» состоит из комбинации слов и изображений. Каждый пиксель в камере захватывает свет и превращает его в данные, а затем эти данные используются для воссоздания изображения. Очень многие считают, что чем больше пикселей — тем лучше изображение, но это не так. Данные, которые они собирают, являются как хорошей, так и плохой информацией. Что означает термин "плохая информация"? К этому относятся шумы, низкая насыщенность цвета и небольшая экспозиция и так далее. Но вопрос "Чем больше мегапикселей — тем лучше?" остается открытым. Давайте возьмем пример 12-мегапиксельной и 16-мегапиксельной камеры телефона. Чем большее количество мегапикселей, тем больше информации они можут собрать. Исходя из этого можно предположить, что 16 МП делает снимки лучше. Но в реальности 16-мегапиксельная камера может иногда снимать изображения гораздо хуже, чем 12-мегапиксельная камера телефона, если обе камеры имеют одинаковый размер сенсора. 16-мегапиксельная камера телефона имеет 16 миллионов пикселей на том же датчике камеры, который присутствует на 12-мегапиксельной камере телефона. Это означает, что на одном и том же участке пространства будет больше пикселей, что приведет к снижению захвата света и, в конечном итоге, к получению худшего изображения.РАЗМЕР МАТРИЦЫ Размер матрицы определяет, сколько света захватит камера, чтобы создать изображение. Количество света, которое принимает матрица, в конечном итоге дает более лучшие изображения. Таким образом, больший датчик будет захватывать больше света, собирая больше информации и создавая более качественные и четкие изображения. В настоящее время производители смартфонов увеличивают размер матрицы, чтобы получать более качественные фотографии при слабом освещении.
Чем большее количество мегапикселей, тем больше информации они можут собрать. Исходя из этого можно предположить, что 16 МП делает снимки лучше. Но в реальности 16-мегапиксельная камера может иногда снимать изображения гораздо хуже, чем 12-мегапиксельная камера телефона, если обе камеры имеют одинаковый размер сенсора. 16-мегапиксельная камера телефона имеет 16 миллионов пикселей на том же датчике камеры, который присутствует на 12-мегапиксельной камере телефона. Это означает, что на одном и том же участке пространства будет больше пикселей, что приведет к снижению захвата света и, в конечном итоге, к получению худшего изображения.РАЗМЕР МАТРИЦЫ Размер матрицы определяет, сколько света захватит камера, чтобы создать изображение. Количество света, которое принимает матрица, в конечном итоге дает более лучшие изображения. Таким образом, больший датчик будет захватывать больше света, собирая больше информации и создавая более качественные и четкие изображения. В настоящее время производители смартфонов увеличивают размер матрицы, чтобы получать более качественные фотографии при слабом освещении. Это изображение поможет вам понять матрицы. Цветные рамки — это разные значения матрицы. Здесь показано, сколько датчиков могут захватывать, если они использовали один и тот же объектив для фотографирования. Таким образом, больший датчик в конечном итоге будет захватывать больше света и деталей. Для смартфонов это измеряется по диагонали в долях дюйма Размеры сенсоров, обычно используемых в камерах смартфонов, включают 1 / 1,7-дюймовый, 1 / 2,0-дюймовый и 1 / 2,3-дюймовый. Вот почему производители фотоаппаратов в настоящее время увеличивают размер сенсора, чтобы улучшить качество фотосъемки при слабом освещении и получать четкие и красочные изображения. Мегапиксели и размер матрицы оба важны для получения изображений хорошего качества. Оба имеют некоторые преимущества и недостатки. Если у вас больше мегапикселей, то вы снимайте фотографии большого размера, которые занимают больше места вместе с плохой информацией. Больше данных также означает больше полезной информации при захвате изображений.
Это изображение поможет вам понять матрицы. Цветные рамки — это разные значения матрицы. Здесь показано, сколько датчиков могут захватывать, если они использовали один и тот же объектив для фотографирования. Таким образом, больший датчик в конечном итоге будет захватывать больше света и деталей. Для смартфонов это измеряется по диагонали в долях дюйма Размеры сенсоров, обычно используемых в камерах смартфонов, включают 1 / 1,7-дюймовый, 1 / 2,0-дюймовый и 1 / 2,3-дюймовый. Вот почему производители фотоаппаратов в настоящее время увеличивают размер сенсора, чтобы улучшить качество фотосъемки при слабом освещении и получать четкие и красочные изображения. Мегапиксели и размер матрицы оба важны для получения изображений хорошего качества. Оба имеют некоторые преимущества и недостатки. Если у вас больше мегапикселей, то вы снимайте фотографии большого размера, которые занимают больше места вместе с плохой информацией. Больше данных также означает больше полезной информации при захвате изображений. Важно то, что при использовании более высокой мегапиксельной камеры размер используемого в ней датчика также должен иметь больший размер. Это поможет получить более качественные изображения. Но не только эти показатели влияют на качество снимков. Но это… Благодарю за внимание и ознакомление, надеюсь, что вам было интересно ознакомиться с данной информацией, а мы встретимся с вами как всегда в беспятнадцати полвторого, пока!
Важно то, что при использовании более высокой мегапиксельной камеры размер используемого в ней датчика также должен иметь больший размер. Это поможет получить более качественные изображения. Но не только эти показатели влияют на качество снимков. Но это… Благодарю за внимание и ознакомление, надеюсь, что вам было интересно ознакомиться с данной информацией, а мы встретимся с вами как всегда в беспятнадцати полвторого, пока!
Выбрать колонку
Добавить в колонку
Изменения необратимы после отправки
Матрицы и камеры
Производителей цифровых камер больше, чем тех кто «умеет» делать матрицы. Схем используемых объективов не много. Но споры о том, чьи фотографии лучше не прекращаются. Алгоритмы преобразования сигнала с матрицы «в файл», дизайн и пользовательские функции — то, над чем собственно и могут потрудиться «фирменные» конструкторы.
И все же интересно — много ли зависит от матрицы и могут ли камеры с близкими по характеристикам CCD/CMOS (или даже идентичными) сильно отличаться по фотографическим возможностям и изображению.
Для сравнения были взяты экземпляры распространенных и очень удачных цифровых камер «полупрофессионального» уровня. Все они уже были испытаны ранее и описаны. Технические характеристики и описания: Canon Power Shot G2, Olympus C-5050ZOOM, Casio QV4000 и здесь, Casio QV5700, Nikon Coolpix 5000. Данные о матрицах взяты из этих же материалов, а так же статей о матрицах и итогах года. В прочем SONY и Panasonic не держат секретов об уже выпущенных светочувствительных чипах и найти их описание можно через любую поисковую систему в сети. Труднее установить, что же конкретно установлено в цифровой фотоаппарат.
Отобранные для сравнения аппараты интересны тем, что два из них практически идентичны по конструкции, но имеют матрицы разных производителей и разрешения (Casio), Canon G2 и Casio QV4000 собраны на одинаковых матрицах и объективах, но различны по конструкции и используемым алгоритмам «оцифровки», 5-ти мегапиксельные аппараты собраны на матрицах разных производителей и размеров. Так что есть, что сравнить.
Так что есть, что сравнить.
То, что дизайнеры могут по разному использовать ресурсы матриц хорошо видно на примере Canon G2 и Casio QV4000. При одной и той же матрице и объективе, аппараты отличаются максимальным форматом кадра, диапазоном возможных светочувствительностей (у Casio вообще единственное базовое значение ISO) и наличием RAW (у Casio формально RAW нет). Возможно, что такая «искусственная скромность» Casio результат «рыночного соглашения». И это вполне вероятно — ведь множество функций Casio QV4000 скрыты от «рядового пользователя» (смотри здесь) но все же существуют. Прямой конкурент Casio QV5700 с 1/1,8″ матрицей Panasonic — Olympus C-5050 с такой же по размеру и разрешению матрицей от Sony. В Nikon Coolpix 5000 установлена 5 мегапиксельная и в 2/3″ — большая матрица с наибольшим размером отдельного чувствительного элемента — 3,4 микрона. При таком «большом» элементе и матрице максимальная диафрагма в F/8 и то только для широкого угла выглядит скромной в сравнении с F/10 у Olympus с его меньшей матрицей.
| камера | Canon PowerShot G2 | Olympus С-5050 Zoom | Casio QV4000 | Casio QV5700 | Nikon 5000 |
| матрица | Sony ICX406AQ | Sony | Sony ICX406AQ | Panasonic MN39594PH-L | Sony ICX282 |
| матрица, размер | 1/1,8″ | 1/1,8″ | 1/1,8″ | 1/1,8″ | 2/3″ |
| матрица, эффективных элементов млн | 3,9 | 4,92 | 3,98 | 4,92 | 4,92 |
| Размер элемента мкм | 3,12×3,12 | 2,775×2,775 | 3,12×3,12 | 2,7×2,7 | 3,4×3,4 |
| чувствительность | 50, 100, 200, 400 | 100, 200, 400 | 64 (100) | 50, 100, 200, 400, 800 | 100, 200, 400, 800 |
| кадр | 2272×1704 | 2560×1920 | 2240×1680 | 2560×1920 | 2560×1920 |
| диафрагма | F/2,0 — F/2,5 -F/8 | F/1,8 — F/10 | F/2,0 — F/2,5 -F/8 | F/2,0 — F/2,5 -F/8 | W F/2,8 — F/8 |
Одной из ключевых характеристик цифрового фотоаппарата является его «шумность». Она и была использована для сравнения камер. Про методики определения и оценки шум можно посмотреть здесь и здесь. «Мерой шумности для цифровой фотографии можно считать стандартное отклонение — среднеквадратичное отклонение от среднего, которое выводит Photoshop для всей картинки или выделенной ее области в меню «Гистограмма» (можно смотреть значение среднего и отклонения для яркости L или любого из цветов выбранного цветового пространства RGB, HSB, LAB)».
Она и была использована для сравнения камер. Про методики определения и оценки шум можно посмотреть здесь и здесь. «Мерой шумности для цифровой фотографии можно считать стандартное отклонение — среднеквадратичное отклонение от среднего, которое выводит Photoshop для всей картинки или выделенной ее области в меню «Гистограмма» (можно смотреть значение среднего и отклонения для яркости L или любого из цветов выбранного цветового пространства RGB, HSB, LAB)».
При испытаниях на световой столик укладывалась молочная пленка, запечатанная черными чернилами различной плотности в четырех отдельных зонах. Камера устанавливалась на штатив и производилась съемка с максимальной и минимальной возможной для камеры чувствительностью. Для сглаживания неоднородностей тестового объекта объектив камеры расфокусировался, а диафрагма устанавливалась максимально открытой. Баланс белого устанавливался вручную, экспозиция по экспонометру и с вилкой ±1 ступень выдержки. Съемка производилась в TIFF или RAW.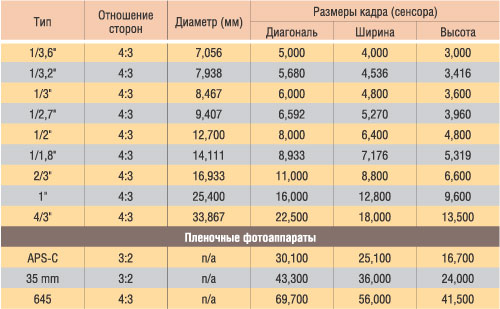 Из снимка вырезались 4 квадратика различной оптической плотности размером 150×150 пикс. Таким образом для каждого фотоаппарата было получено по набору однородных квадратиков для максимальной и минимальной чувствительности. С помощью Photoshop можно определить для каждого из квадратиков значение яркости L и стандартного отклонения яркости dL. Далее не составит труда построить зависимость шума от яркости L. Величиной, характеризующей шум традиционно считается 20хLg(dL/L). Исходные данные в Excel можно посмотреть здесь. Зависимость шума от яркости для каждой камеры представлена в фильме Shockwave Flash:Для удобства сравнения можно «включить» только необходимые камеры и величины светочувствительности.
Из снимка вырезались 4 квадратика различной оптической плотности размером 150×150 пикс. Таким образом для каждого фотоаппарата было получено по набору однородных квадратиков для максимальной и минимальной чувствительности. С помощью Photoshop можно определить для каждого из квадратиков значение яркости L и стандартного отклонения яркости dL. Далее не составит труда построить зависимость шума от яркости L. Величиной, характеризующей шум традиционно считается 20хLg(dL/L). Исходные данные в Excel можно посмотреть здесь. Зависимость шума от яркости для каждой камеры представлена в фильме Shockwave Flash:Для удобства сравнения можно «включить» только необходимые камеры и величины светочувствительности.
Лучший результат при минимальной чувствительности у Nikon 5000. И это не удивительно — его чувствительный элемент наибольший, а система фильтров C-Y-G-M теоретически использует свет более эффективно, чем G-R-G-B. Так же вполне логично и то, что Canon G2 и Casio QV4000 шумят почти одинаково. 5-ти мегапиксельная матрица SONY 1/1,8″ (Olympus C-5050) шумит чуть сильнее конкурента от Panasonic (Casio QV5700). На максимальной чувствительности Nikon 5000 с его ISO 800 уступает только Olympus C-5050 с ISO 400 и лучше других аппаратов с ISO 400 и 800. Так что размер отдельной ячейки все еще важен.
5-ти мегапиксельная матрица SONY 1/1,8″ (Olympus C-5050) шумит чуть сильнее конкурента от Panasonic (Casio QV5700). На максимальной чувствительности Nikon 5000 с его ISO 800 уступает только Olympus C-5050 с ISO 400 и лучше других аппаратов с ISO 400 и 800. Так что размер отдельной ячейки все еще важен.
Дополнительно для визуальной оценки «шумности» приведены фрагменты квадратиков близкой яркости для минимальной возможной чувствительности и разных камер (яркость некоторых фрагментов немного изменена для «удобства» сравнения, у фрагмента Casio QV4000 цвета приведены к «серому», так как ручной баланс «сработал» некорректно):
Olympus C5050ZOOM ISO64 1/100 c F/2,6 | |
Nikon Coolpix 5000 ISO100 1/37 c F/4,8 | |
Canon PS G2 ISO50 1/8 c F/2,5 | |
Casio QV4000 ISO 64 (100) 1/139 c F/2 | |
Casio QV5700 ISO 50 1/93 c F/2 |
Выводы:
1. Большая матрица с большим светочувствительным элементом шумит меньше.
Большая матрица с большим светочувствительным элементом шумит меньше.
2. Шумы Canon G2 и Casio QV4000 очень похожи и если предположить, что у этих аппаратов с одинаковыми матрицами и объективами алгоритмы оцифровки разные, то надеяться на «всесилие математики» в борьбе с шумами пока рано и главное все же матрица.
3. Так как камеры собраны на базе близких по характеристикам матриц (или вообще одних и тех же), то как и в случае с пленкой выбирать следует (в одном классе) тот фотоаппарат, который устраивает вас функционально и просто вам «по душе».
Руководство по фотосъемке с размером сенсора камеры— Dave Morrow Photography
Размер сенсора камеры является наиболее важным фактором при определении общей производительности камеры и качества изображения, поскольку оптимальные настройки фокусировки, диафрагмы, ISO и скорости затвора уже получены.
Ниже вы узнаете:
- Почему размер сенсора камеры так важен.
- Какие настройки камеры обеспечивают стабильное получение изображений высочайшего качества без шума.
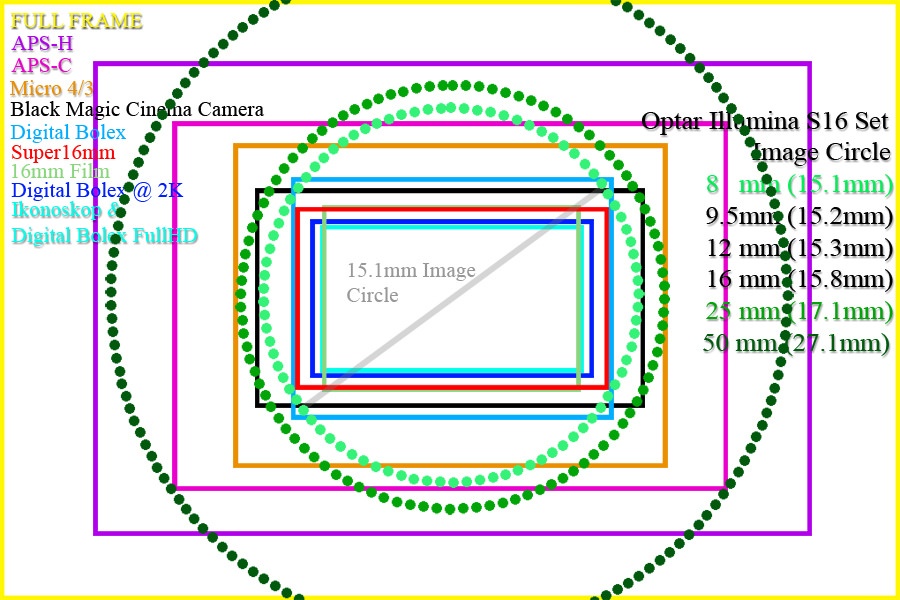
- Основы битовой глубины и глубины цвета.
- Как работает сенсор камеры.
Прокрутите вниз, откройте бесплатный PDF-файл и начните обучение!
Содержание
Размер сенсора камеры Дополнительные видео
Следующее видео дополняет учебный материал из приведенного ниже руководства, что значительно упрощает его визуализацию.
Стать экспертом по гистограммам критически важно для понимания того, почему размер сенсора камеры имеет значение, что, в свою очередь, обеспечивает наилучшее качество изображения.
Датчик камеры и основы качества изображения
Понимание размера сенсора камеры и его важности — один из наиболее важных аспектов изучения фотографии.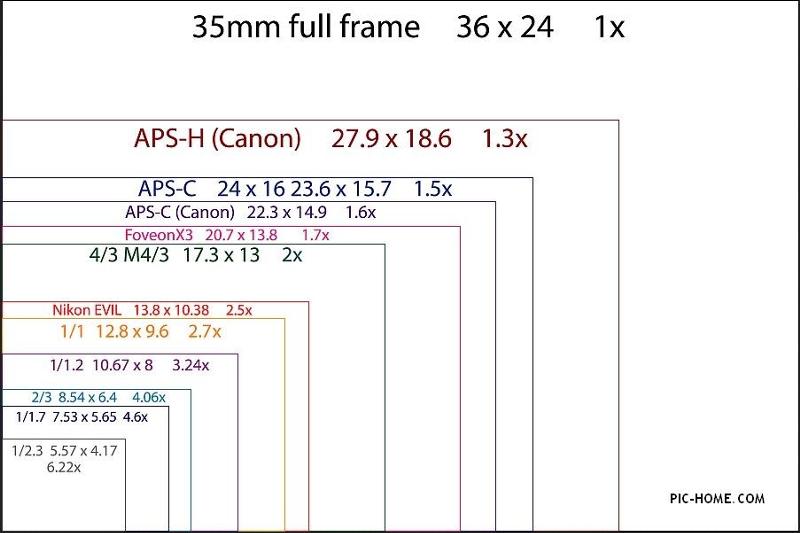
Выбор наилучших общих настроек камеры (ISO, выдержка, диафрагма) и атрибутов качества изображения (динамический диапазон, шум, битовая глубина, размер сенсора) невозможен без базового понимания того, как работает сенсор камеры.
Что такое датчик камеры?
Датчик камеры, также известный как датчик изображения, представляет собой электронное устройство, которое собирает информацию о свете, состоящую из цвета и интенсивности, после того, как он проходит через отверстие объектива, известное как апертура.
Скорость затвора определяет продолжительность времени, в течение которого световая информация собирается датчиком камеры.
ISO определяет усиление, которое получает световая информация при ее передаче в цифровой мир, где она сохраняется на карте памяти в виде файла изображения.
Существует два популярных типа датчиков изображения: КМОП-датчики (комплементарные металлооксидные полупроводники) и ПЗС-датчики (устройства с зарядовой связью).
Благодаря более высоким характеристикам, особенно при слабом освещении, и более низкой стоимости датчик CMOS можно найти почти во всех современных цифровых камерах.
ДатчикиCMOS отличаются своим физическим размером (площадью поверхности для сбора световой информации) и количеством пикселей, собирающих световую информацию, которые составляют эту площадь поверхности.
Что такое пиксель в фотографии?
Датчик камеры представляет собой прямоугольную сетку, содержащую миллионы крошечных квадратных пикселей, как показано на рисунке.
Пиксели — это ведра или лунки для сбора и записи световой информации. Они являются базовым блоком датчика изображения.
Цифровая фотография — это процесс записи реальных цветов и тонов сцены или композиции с использованием отдельных пикселей.
Каждый отдельный квадратный пиксель представляет собой небольшой образец композиции изображения в целом, состоящий из одного цвета. Больше не надо.
Комбинация миллионов маленьких пикселей разного цвета создает изображение как единое целое.
Назовем этот набор всех пикселей сенсорной сеткой.
Прямоугольник «цвета радуги» на рисунке показывает сетку датчика.Пиксели настолько малы, что трудно увидеть каждую единицу.
Создание фотографий — пиксели, объяснение
Цель следующего раздела — помочь вам понять, как работают пиксели.
Представьте себе композицию изображения, видимую в видоискателе камеры, с воображаемой сеткой, наложенной на нее, содержащей миллионы крошечных квадратов одинакового размера, как показано на рисунке ниже.
Представьте, что следующая графика — это сцены реального мира, которые вы видите в видоискатель камеры или на задней панели экрана просмотра в реальном времени.
По мере того, как мы начинаем увеличивать красную рамку, квадраты становятся все ближе и ближе к своему действительному размеру.
Наконец, мы увеличиваем так далеко, что каждый отдельный квадрат можно увидеть в его реальном размере.
Эти квадраты настолько крошечные, что не содержат деталей только одного цвета или тона, как показано ниже.
Взгляните на разные предметы вокруг вас. Если вы посмотрите внимательно, под большим увеличением, все станет одного цвета в очень маленьком масштабе.
Комбинация всех этих маленьких цветных квадратов создает сцену или композицию в целом.
Назовем эту совокупность воображаемых маленьких цветных квадратов сеткой изображений.
ПРИМЕЧАНИЕ. Этот снимок был сделан до наступления сумерек под проливным дождем на реке Ли в Китае. Этот сценарий съемки является окончательным испытанием сенсора камеры.
Каждый квадратный пиксель на сетке сенсора соответствует крошечному квадрату на сетке воображаемого изображения.
- Сенсорная сетка — это реальный объект, который собирает световую информацию о сцене с помощью пикселей.
- Сетка изображения — это воображаемый объект, который разбивает сцену или композицию реального мира на миллионы крошечных квадратов.

- Единственная задача пикселя — записать единственный определенный цвет каждого крошечного воображаемого квадрата на сетке изображения.
Таким образом, каждый пиксель собирает только один цвет, соответствующий очень маленькому образцу фотографируемой сцены.
Когда выбраны правильные настройки камеры, выдержка, ISO и диафрагма, каждый пиксель на сетке сенсора будет собирать и записывать точный цвет соответствующего квадрата на сетке изображения.
В свою очередь, создается цифровое изображение из миллионов пикселей, которое соответствует композиции реального мира, видимой в видоискателе.
В фотографии это называется правильной экспозицией.
Когда выбраны неправильные настройки камеры, квадраты в пиксельной сетке не соответствуют сетке квадратов изображения, создавая цифровое изображение, не соответствующее снимаемой сцене.
Цифровая фотография — это процесс записи информации о цвете реального мира, представленной сеткой изображения, и ее передачи в цифровой мир, представленный сеткой пикселей.
Цель фотографа — выбрать правильные настройки камеры, передающие эту информацию с точностью и точностью, создавая цифровое изображение, которое соответствует тому, что они видят в видоискателе.
Датчик камеры, содержащий пиксельную сетку, — это инструмент, используемый для сбора этой информации и выполнения задачи.6 также обозначается как «10 в шестой степени», что может быть записано как 1 000 000 или 1 миллион.
мегапикселя, следовательно, означает 1 миллион пикселей. Это стандартная единица измерения в электронике.
- Например, матрица камеры с разрешением 36,6 мегапикселя (36,6 миллиона пикселей) может иметь ширину 7360 пикселей и высоту 4912 пикселей.
- Умножение ширины 7360 пикселей на высоту 4912 пикселей дает оценку сенсора 36,6 миллиона пикселей.
- Проще говоря, это будет сетка шириной 7360 пикселей и высотой 4912 пикселей, содержащая всего 36.6 миллионов пикселей.
Больше мегапикселей не всегда означает лучшее качество изображения!
Давайте обсудим…
Пиксели — лунки для сбора световой информации
Свет состоит из фотонов или небольших пакетов для передачи световой информации. Фотоны — это элементарные частицы, которые не имеют веса, но несут информацию о свете.
Фотоны — это элементарные частицы, которые не имеют веса, но несут информацию о свете.
Когда фотоны сталкиваются или взаимодействуют с определенными материалами, такими как кремниевые КМОП-датчики изображения, свободные электроны высвобождаются из материала датчика, создавая небольшой электрический заряд.Это известно как фотоэлектрический эффект.
Свободные электроны собираются и подсчитываются отдельными пикселями на сетке датчика. Каждая пиксельная лунка имеет максимальное количество электронов, которое она может собрать. Этот максимум известен как полная мощность скважины.
Пиксель может отображать только один цвет, включая черный, белый, оттенки серого и значения цвета RGB. Цвет каждого пикселя определяется количеством и типом собираемой световой информации.
Определение цвета и тона пикселей
Количество электронов, собираемых каждым пикселем, определяет его яркость, также известную как значение, по шкале от черного до белого.Шкала от черного к белому известна как тональный диапазон или тональная шкала.
Яркость каждого отдельного пикселя по шкале от черного к белому известна как тональное значение или яркость.
- Чем больше электронов собирает пиксель, тем светлее он соответствует тональности изображения.
- Белый пиксель содержит максимальное количество электронов.
- Черный пиксель не содержит электронов.
- Все значения между максимальным и минимальным соответствуют оттенкам серого.
Счетчик электронов не может определить конкретную информацию о цвете, поэтому над каждым пикселем помещается цветной фильтр, помогающий определить его цвет. Это подробно обсуждается ниже.
Путем объединения информации о тональном значении и цветовом фильтре окончательный цвет определяется для каждого пикселя.
На графике ниже показан тональный диапазон и произвольное количество электронов, необходимых для создания каждого тонального значения.
Цель состоит в том, чтобы визуализировать эту концепцию.Количество электронов складывается и не имеет значения.
Собран больше электронов = более светлые тона = более светлые пиксели, отображаемые на фотографии
Например, Pixel Well 1 собрал 8 электронов, создав темный оттенок.
Pixel Well 2 собрал 22 электрона, давая светлый тон.
Pixel Well 3 собрал 13 электронов, создающих среднюю тональную величину.
Количество электронов, собранных каждой ячейкой пикселей, дает соответствующее тональное значение для этого пикселя.Это тональное значение отображается на последней фотографии вместе с цветом.
Эта информация передается с датчика изображения в цифровой мир с помощью электронного сигнала.
Цифровой сигнал, яркость и тональное значение
Каждый электрон, образовавшийся во время столкновения фотонного датчика, несет небольшой электрический заряд. Чем больше электронов собирает пиксель, тем больше заряда содержит пиксельная лунка. Электрический заряд — это физическая величина.
Этот заряд используется для преобразования световой информации, собранной каждым пикселем, в цифровую информацию, которую могут понять камеры и компьютеры.
Электронный сигнал передает физические значения реального мира в цифровой мир двоичного кода.
Каждому тональному значению по шкале от черного к белому соответствует сигнал, необходимый для его создания. Определенные уровни сигнала создают определенные тональные значения. Чем больше электронов собирает пиксель, тем сильнее сигнал, который он создает.
Меньше света = меньше электронов = меньше сигнал = темнее тональное значение
Больше света = больше электронов = больший сигнал = более светлое тональное значение
Когда пиксельная лунка заполняется электронами до верха, создавая максимальный сигнал, соответствующее тональное значение является белым, создавая белый пиксель на фотографии.
Поскольку пиксель заполнен, он больше не может собирать световую информацию.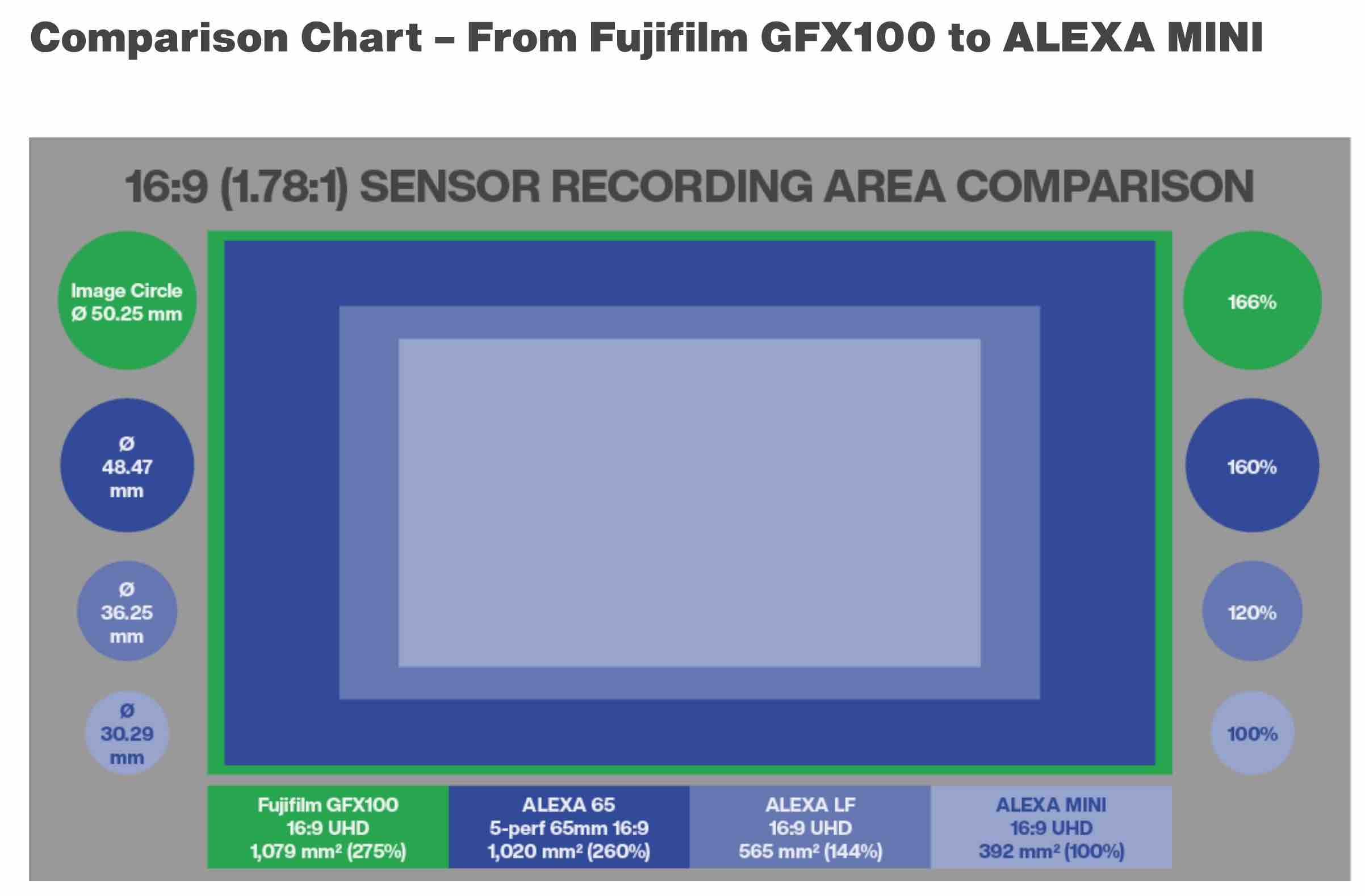 Это называется полностью насыщенным пиксельным колодцем.
Это называется полностью насыщенным пиксельным колодцем.
С точки зрения фотографии, этот пиксель бывает «обрезанным», «раздутым» или «передержанным». Каждый термин относится к одному и тому же понятию.
Никакая информация, собранная пикселем до заполнения, не может быть восстановлена или использована в окончательном изображении. Это ушло навсегда!
Когда пиксельная лунка не содержит электронов, она не производит сигнала. Соответствующее значение тона — черный, что создает черный пиксель на фотографии.
Тональные значения, создаваемые каждым сигналом, объединяются с собранной информацией о цвете, чтобы получить окончательный цвет каждого пикселя на фотографии.
Цвет и свет в цифровом мире
Поскольку информацию о цвете нельзя определить напрямую по количеству электронов в каждой ячейке пикселя, на каждый пиксель накладывается цветной фильтр.
Большинство, но не все, КМОП-сенсоры используют фильтр Байера, который выглядит как лоскутное одеяло из красного, зеленого и синего экранов, с одноцветным экраном, покрывающим каждый пиксель, как показано на рисунке.
Другие массивы цветных фильтров, включая фильтр Байера, обсуждаются в ссылке на Википедию под рисунком.
Каждый пиксель покрыт цветовым фильтром: красным, зеленым или синим. Цвет каждого пикселя определяется цветом света (частотой световой волны), который проходит через этот фильтр.
Фильтр Байера состоит из пиксельных фильтров 50% зеленого, 25% красного и 25% синего.
Человеческий глаз воспринимает яркость зеленого больше, чем красного или синего, поэтому пиксели, отфильтрованные зеленым, представлены в фильтре Байера в два раза чаще.
Красный свет проходит через пиксели, отфильтрованные красным, а зеленый и синий — нет. Синий свет проходит через пиксели, отфильтрованные синим, а красный и зеленый — нет. Вы уловили суть…
Каждый пиксель может собирать только информацию о первичном цвете назначенного ему красного, зеленого или синего фильтра, а также количество электронов, собранных в лунке пикселя, которые определяют тональное значение.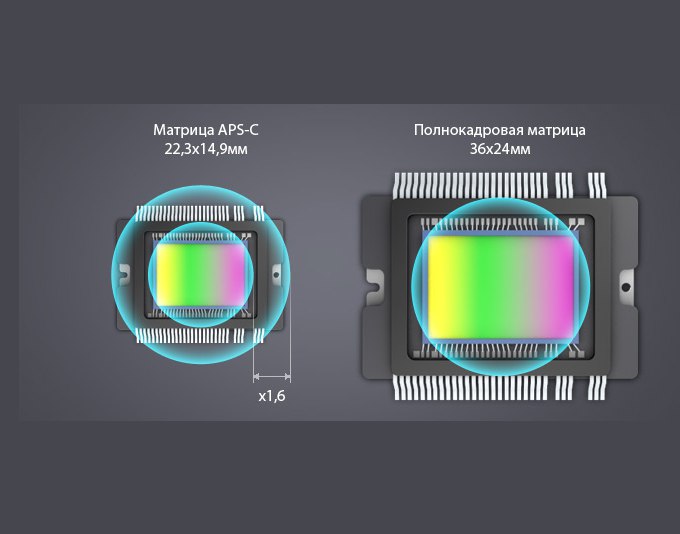
Используя эту информацию, а также ряд алгоритмов и интерполяций, камера может определить цвет каждого пикселя, содержащегося на сетке сенсора.
Точность, с которой эта информация передается и отображается в конечном изображении, определяется битовой глубиной.
Битовая глубина, глубина цвета и качество изображения
Битовая глубина определяет количество уникальных вариантов цвета и тона, доступных для создания изображения. Эти варианты цвета обозначаются комбинацией нулей и единиц, известной как биты, которые образуют двоичный код.
Битовая глубина — это система оценки точности камеры в передаче значений цвета и тона.
Аналогия битовой глубины
Взрослый и двухлетний ребенок, смотрящие на один и тот же пейзаж, видят примерно одно и то же, состоящее из значений цвета и тона (интенсивности света).
Взрослый может подробно описать эту сцену, используя большое количество описательных слов и сложную лексику.
Двухлетний ребенок, видя то же самое, не может точно описать сцену из-за ограниченного словарного запаса.
Они оба видят и собирают одну и ту же информацию из реального мира, но один может описать ее в ярких деталях, а другой — нет.
Системы с большей битовой глубиной, как и большие словари, обеспечивают лучшую точность при передаче информации.
Как работает битовая глубина в фотографии
По истечении времени экспозиции, определяемого выдержкой, сигнальная информация, создаваемая каждым пикселем, обрабатывается и преобразуется в цифровой язык, известный как двоичный код.
Цифровой язык принимает форму нулей и единиц (битов) и передает значения цвета (красный, зеленый, синий) и тона, собранные каждым пикселем.
Тональное значение конкретного пикселя определяется из количества собранных электронов (заряда), а цвет определяется с помощью фильтра Байера.
Точность коммуникации оценивается по шкале битовой глубины. Системы с большей битовой глубиной позволяют более точно описывать информацию, собираемую каждым пикселем.
Системы с большей битовой глубиной позволяют более точно описывать информацию, собираемую каждым пикселем.
Двоичный код и битовая глубина, объяснение
Мы привыкли к системам счисления с основанием 10, таким как 10, 20, 30, 1000, 100000.
Вбитах используется система счисления с основанием 2, также известная как двоичная.
У 1-битной системы есть только два возможных результата. 1 или 0, включен или выключен, истина или ложь, да или нет, черный или белый.
1-битная фотография имеет только два возможных цвета пикселей: черный и белый.
Считайте это ребенком, который говорит только два слова, да и нет, черное и белое. Вы не будете зависеть от этого ребенка, чтобы передать пейзажную сцену с большой степенью точности или точности.
По мере того, как битовая глубина системы увеличивается, комбинации различных возможных вариантов или результатов также увеличиваются.
Расчет битовой глубины в фотографии
2-битная система будет содержать 4 следующих варианта: (0,0) (0,1) (1,0) (1,1). 3 = 8.N возможных вариантов общения.
3 = 8.N возможных вариантов общения.
В фотографии количество битов определяет возможности цвета или тона, которые может отображать один пиксель, что известно как битовая глубина.
Это не означает, что каждая возможность обязательно присутствует на фотографии, но может.
В приведенном ниже примере показаны тональные значения от черного к белому, передаваемые с разной степенью точности различными системами битовой глубины.
Тональный диапазон одинаков для всех систем битовой глубины, начиная с черного и заканчивая белым.
Битовая глубина определяет, сколько шагов или возможных вариантов в пределах тонального диапазона можно передать. Каждый шаг или возможный выбор известен как корзина. Чем больше ящиков, тем больше вариантов.
Как показано на рисунке ниже, 1-битная система может передавать только черный и белый цвета. 2-битная система может передавать черный, белый и два оттенка серого.
3- и 4-битные системы предоставляют больший выбор вариантов, используемых для передачи различных тональных значений в пределах тонального диапазона. 8) различными ячейками.Из-за огромного количества возможных вариантов тона переход от одного к другому не различим для человеческого глаза. Изображение JPEG является 8-битным.
8) различными ячейками.Из-за огромного количества возможных вариантов тона переход от одного к другому не различим для человеческого глаза. Изображение JPEG является 8-битным.
Цветовые каналы и глубина цвета
Пример выше был предназначен только для черно-белых фотографий. Большинство цифровых фотоаппаратов делают цветные фотографии.
Эти цветные фотографии созданы с использованием трех основных цветов: красного, зеленого и синего, определенных фильтром Байера.
Они известны как цветовые каналы.Тональное значение, связанное с каждым цветом, определяется мощностью сигнала.
Файлы JPEG обычно 8-битные, тогда как файлы RAW обычно 12-16-битные. Некоторые камеры имеют возможность изменять свой текущий битрейт с помощью пользовательских настроек.
На Nikon D810 это отмечено как «Запись в формате NEF (RAW)» в меню съемки.
Погуглите название вашей камеры «марка-модель» + «настройки битовой глубины», чтобы получить конкретную информацию об этой настройке.
Пример ниже показывает 4-битную цветовую шкалу для основных цветов RGB — красного, зеленого и синего.Бункер 15 в каждом из цветовых каналов представляет собой чистый, полностью насыщенный цвет, также известный как оттенок.
ПРИМЕЧАНИЕ. Не все камеры обрабатывают цвет одинаково. Следующий пример позволяет концептуализировать эту концепцию. Это не должно быть технически точным для конкретной камеры.
ТЕХНИЧЕСКОЕ ПРИМЕЧАНИЕ: Хотя каждый из цветовых каналов имеет одинаковое количество шагов, изменение зеленого все еще можно увидеть вплоть до 1, где трудно отличить красный цвет от 1 и синий. падает в 2.4 = 16 вариантов цвета для каждого канала основного цвета, как показано на рисунке выше.
Каждый из ячеек основного цветового канала можно комбинировать друг с другом для создания новых цветов.
Например, Красный (12), Синий (6), Зеленый (15) создаст уникальный цвет, а Красный (1), Синий (2), Зеленый (4) создаст другой уникальный цвет.
Если для ячейки установлено значение 0, например красный (0), этот цвет отключается, другими словами, черный.
Когда ячейка установлена на (15), она включена, обеспечивая чистый цвет и полную насыщенность, известную как оттенок.8-я степень или 256 возможных результатов для каждого из 3 цветовых каналов.
Красный канал может отображать 255 различных вариантов красного, зеленый может отображать 255 вариантов зеленого и синий, 255 вариантов синего.
вариантов цвета = 255, а не 256. Черный не входит в основную цветовую шкалу, но используется для расчета общего цвета.
Палитра цветов Photoshop отображает 8-битный цвет. В следующем примере показано:
- Чистый красный, R (255), G (0), B (0)
- Чистый зеленый, R (0), G (255), B (0)
- Чистый синий, R (0), G (0), B (255)
Каждый цветовой канал имеет 256 возможных результатов или вариантов, которые он может произвести.3 степени, или 256 * 256 * 256, что равно 16 777 216. 14-ю степень возможных вариаций для каждого из 3 цветовых каналов.3 или 16,384 * 16,384 * 16,384, что равно 4,398,046,511,104.
14-ю степень возможных вариаций для каждого из 3 цветовых каналов.3 или 16,384 * 16,384 * 16,384, что равно 4,398,046,511,104.
Это примерно 4,4 триллиона различных возможных вариантов для каждого пикселя. На каждом датчике миллионы пикселей.
Мы превзошли двухлетнего ребенка, который едва может говорить, мы превзошли взрослого с ярким и подробным словарным запасом, мы достигли такой степени точности, которую только машины могут записывать и общаться.
Человеческий глаз, второй самый (известный) сложный объект на планете после мозга, без проблем распознает приблизительно 12 миллионов различных цветов.
Что касается цвета и тона, машины обошли точность, которую может различить человеческий глаз, созданный методом проб и ошибок на протяжении миллионов лет эволюции.
Размер сенсора камеры — Обзор
Наряду с количеством пикселей сенсоры также оцениваются с точки зрения физического размера сенсора или площади поверхности. Площадь поверхности сенсора также определяет размер каждого пикселя.
Площадь поверхности сенсора также определяет размер каждого пикселя.
Физические размеры сенсора указаны по ширине и высоте, обычно в миллиметрах.Стандартный размер сенсора, такой как 36 мм × 24 мм, известен как полнокадровая камера формата 35 мм.
На следующем рисунке показано сравнение размеров сенсоров камеры для различных популярных форматов сенсоров.
Авторство: Moxfyre и Википедия
Чем больше ширина сенсора, тем больше площадь поверхности сенсора, что обеспечивает большую площадь для сбора световой информации в течение стандартного интервала, известного как время экспозиции.
Представьте датчик как парус на лодке. Чем больше парус, тем больше площадь поверхности, тем сильнее будет ветер.
Чем больше размер сенсора, тем больше площадь поверхности, тем больше света (фотонов) он улавливает.
Обратите внимание на огромную разницу в площади поверхности, собирающей свет, между датчиками APS-C и полнокадровой камерой.![]() Эти камеры будут давать очень разное общее качество изображения, при этом большее намного превышает меньшее.
Эти камеры будут давать очень разное общее качество изображения, при этом большее намного превышает меньшее.
Между APS-H и APS-C разница намного меньше. Эти камеры будут обеспечивать примерно одинаковое качество изображения с небольшими отклонениями.
Это подробно объясняется в следующих разделах.
[mc4wp_form id = ”3726 ″]Фактор кадрирования датчика камеры
Кроп-фактор — это безразмерное справочное число, связанное с датчиками изображения. Он сравнивает диагональное расстояние по каждому конкретному датчику камеры с диагональным расстоянием по полнокадровому датчику камеры.
Для диагонального расстояния представьте себе прямую линию от верхнего правого угла до нижнего левого угла. Это также известно как гипотенуза.2)). Результат составляет примерно 43,3 мм.
Коэффициент кадрирования камеры = 43,3 / Диагональное расстояние датчика камеры
У полнокадровой камеры коэффициент кадрирования составляет 1,43 мм / 43,3 мм.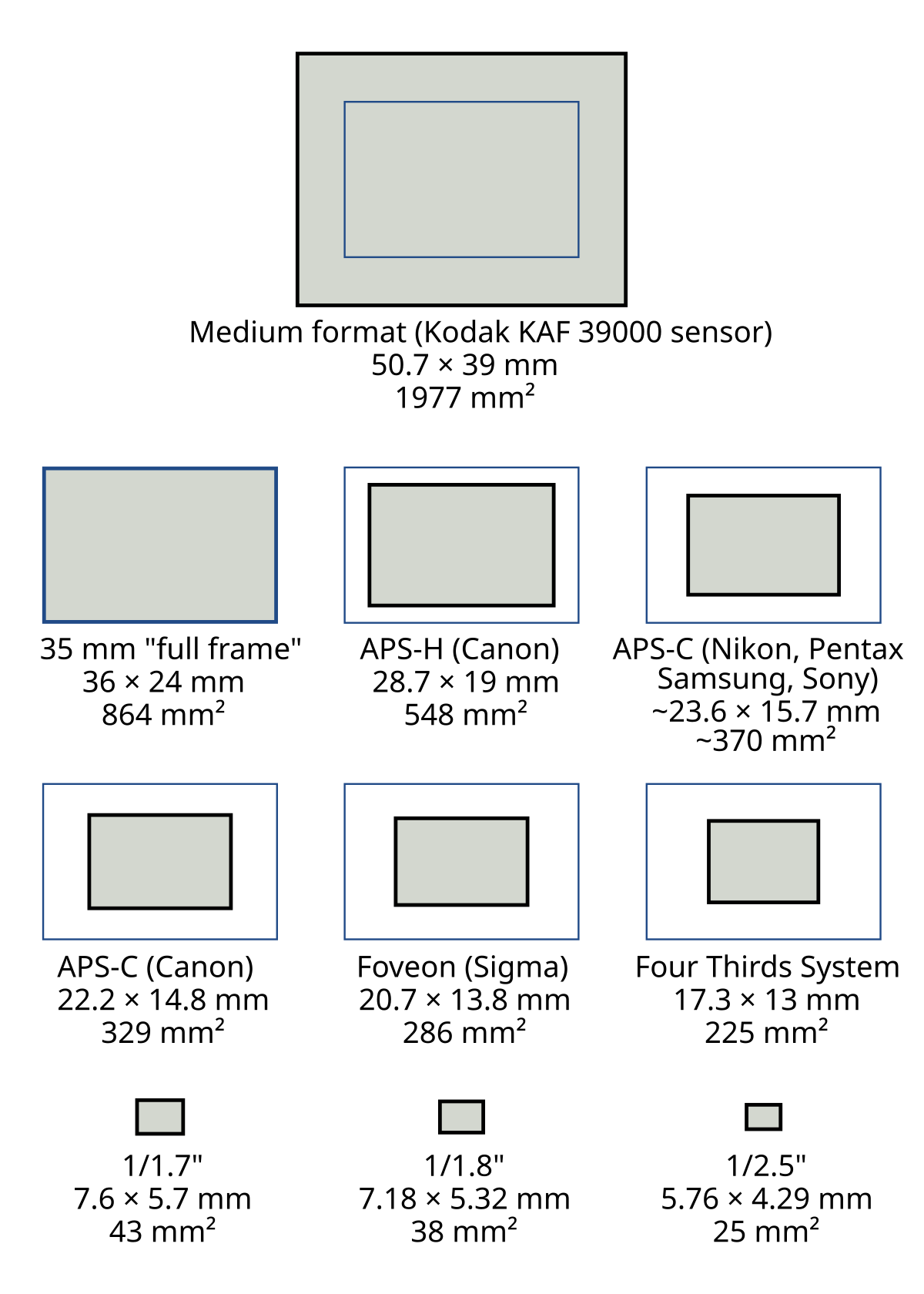
Меньшие сенсоры камеры, такие как стандартная ширина 22,3 мм, датчик APS-C (см. Рисунок выше), будут иметь кроп-фактор примерно 1,6.
Краткое руководство — Урожай датчика стандартной камеры:
- Кроп-фактор полнокадрового датчика = 1 Кроп-фактор датчика
- APS-H = 1.29 Кроп-фактор датчика
- APS-C = от 1,5 до 1,6 в зависимости от модели.
- Кроп-фактор датчика фовеона = 1,73
- Micro 4/3 Sensor Crop Factor = 2
Полнокадровые, среднеформатные датчики и датчики кадрирования
Цифровые камерыможно разделить на 3 категории по размеру сенсора, от самого большого до самого маленького соответственно, средний формат, полный кадр и кадрирование.
При следующих сравнениях датчиков изображения предположите, что каждый сравниваемый датчик относится к одному году изготовления.
Например, , хотя датчик кадрирования обычно обеспечивает меньшее качество и детализацию, чем полнокадровый датчик, датчик кадрирования 2017 года, скорее всего, обеспечит большее качество и детализацию, чем полнокадровый датчик 2000 года.
Типы датчиков камеры:
- Средний формат (коэффициент кадрирования> 1): Самый большой размер сенсора камеры и обычно самая высокая стоимость. Камеры среднего формата обычно очень громоздкие и тяжелые из-за большого датчика изображения, содержащегося в камере.Они обеспечивают фантастические детали и цвет за счет веса и денег.
- Full Frame (Crop Factor = 1): Стандарт для профессиональных фотографов и серьезных любителей. Обеспечивает фантастическое качество изображения и динамический диапазон без дополнительных габаритов, веса или стоимости камеры среднего формата.
- Датчик культуры (фактор культуры <1): Самый дешевый и самый компактный вариант. Меньший размер сенсора камеры обеспечивает более низкое качество изображения с повышенным шумом и меньшим динамическим диапазоном по сравнению с более крупными форматами.Для многих фотографов камера с датчиком кадрирования идеально подходит для их определенного уровня навыков или использования.
Это неплохие фотоаппараты, просто они не так хороши.
Размер сенсора камеры — почему это так важно
Увеличение числа мегапикселей не всегда приводит к повышению качества изображения.
Есть мобильные телефоны, которые снимают 40-мегапиксельные изображения невысокого качества.
Комбинация перечисленного ниже обеспечивает разумную оценку качества изображения камеры.Более подробно они обсуждаются ниже.
- Размер сенсора: Определяет площадь светоприемной поверхности сенсора.
- Качество сенсора: Качество и возраст оборудования, использованного для изготовления сенсора. Более новое оборудование обеспечит лучшее качество изображения, если все остальное останется неизменным.
- Основное качество программного обеспечения: Алгоритмы и код, работающие с операционными системами камеры и обработкой изображений. Новое программное обеспечение обычно дает лучшее качество изображения, если все остальное постоянно.
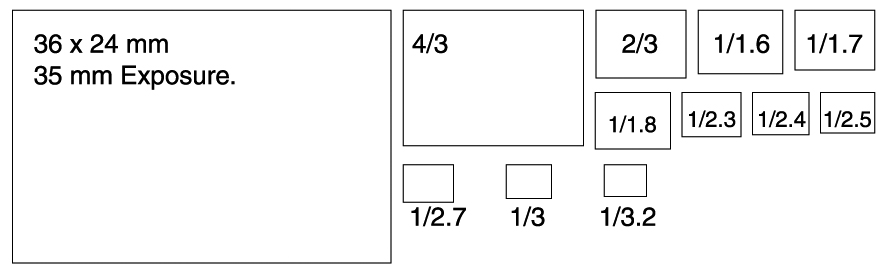
- Ширина пикселя: Также известен как шаг пикселя. Это ширина каждого квадратного пикселя, которая также определяет его площадь поверхности.
- Количество мегапикселей: Общее количество пикселей, содержащихся в сенсоре.
- Настройки битовой глубины (см. Раздел выше): Сколько цветов и тоновых значений датчик может уловить и отобразить в конечном изображении.
Давайте обсудим…
В следующем примере предположим, что это последняя профессиональная полнокадровая камера от Nikon или Sony.Точная модель значения не имеет.
Обе эти компании производят лучшие датчики изображения на рынке.
Это не означает, что вам нужна новейшая и лучшая камера для съемки действительно высококачественных изображений.
Это означает только то, что каждое поколение камер будет немного лучше в перечисленных выше областях по мере улучшения программного обеспечения, оборудования и технических решений.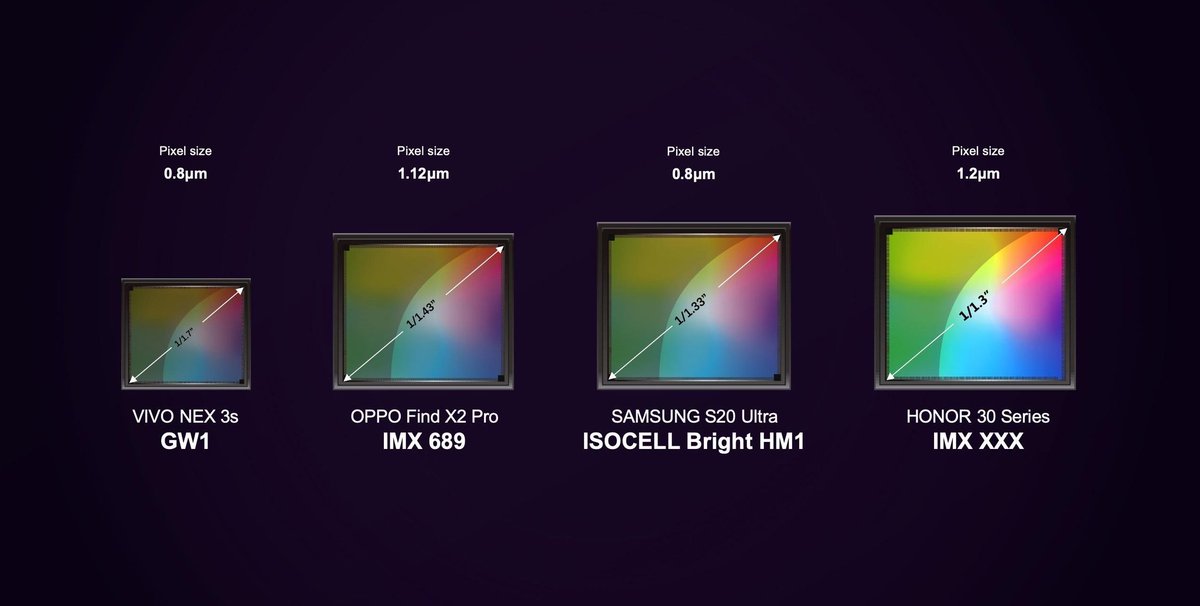
Матрица полнокадровой камеры имеет большую площадь поверхности для захвата большего количества световой информации в течение стандартного промежутка времени.
Это позволяет ей работать лучше при съемке в условиях низкой освещенности, чем камера с датчиком кадрирования.
Наличие большей площади поверхности сенсора также дает возможность содержать больше пикселей, чем камера с меньшим сенсором кадрирования.
Чем больше пикселей содержит сенсор, тем больше деталей о сцене он может собрать.
Помните, что каждый пиксель имеет одно значение цвета или тона.
Например, представьте себе фотографию, напечатанную на стене, шириной 3 фута или примерно 1 метр.
Было бы трудно сказать, что происходило на этой фотографии, если бы она была сделана с помощью 10-пиксельного сенсора.
Для изображения всей сцены будет использоваться только 10 цветов или значений тона.
Было бы очень легко расшифровать каждую деталь на этой фотографии, если бы она была снята с помощью сенсора с разрешением 40 000 000 пикселей.
Меньший шаг (ширина) пикселя в сочетании с большим размером сенсора, а также новейшее программное и аппаратное обеспечение обеспечивают наилучшее качество изображения.
А теперь поговорим о шуме…
Шум изображения и размер сенсора
Датчики и пиксели камерыCMOS по своей природе создают небольшой шум. Это похоже на радиоволны, которые слышны на низкой громкости в наушниках. Даже самые лучшие камеры с оптимальными настройками создают небольшой шум.
Уровень шума зависит от производителя и модели камеры, а также от настроек. Различные типы шума составляют общий профиль шума для данного изображения.
По мере того, как датчик собирает больше света, производя больший сигнал, на конечном изображении становится меньше общего шума.Отношение сигнал / шум (SNR или S / N) используется для описания явления.
На рисунке ниже пиксельные лунки слева имеют более низкое отношение сигнал / шум, а пиксельные лунки, движущиеся вправо, имеют более высокое отношение сигнал / шум..jpg)
- Низкое отношение сигнал / шум означает более высокий процент шума в расчете на общий производимый сигнал, что свидетельствует о большем общем уровне шума в изображении.
- Высокое отношение сигнал / шум означает более низкий процент шума на общий произведенный сигнал, что означает меньший общий шум на изображении.
Цель состоит в том, чтобы заполнить каждую ячейку пикселя до соответствующего максимума тонального значения без отсечения или потери данных с верхнего края, тем самым увеличивая отношение сигнал / шум и качество изображения.
Изображения, содержащие большие пропорции темных оттенков, по своей сути будут иметь более низкое отношение сигнал / шум, что приведет к более заметному шуму. Это одна из причин, по которой изображения при слабом освещении и ночном небе содержат так много шума.
Изображения, содержащие большие пропорции светлых тонов, будут иметь более высокое отношение сигнал / шум, что приведет к менее заметному шуму.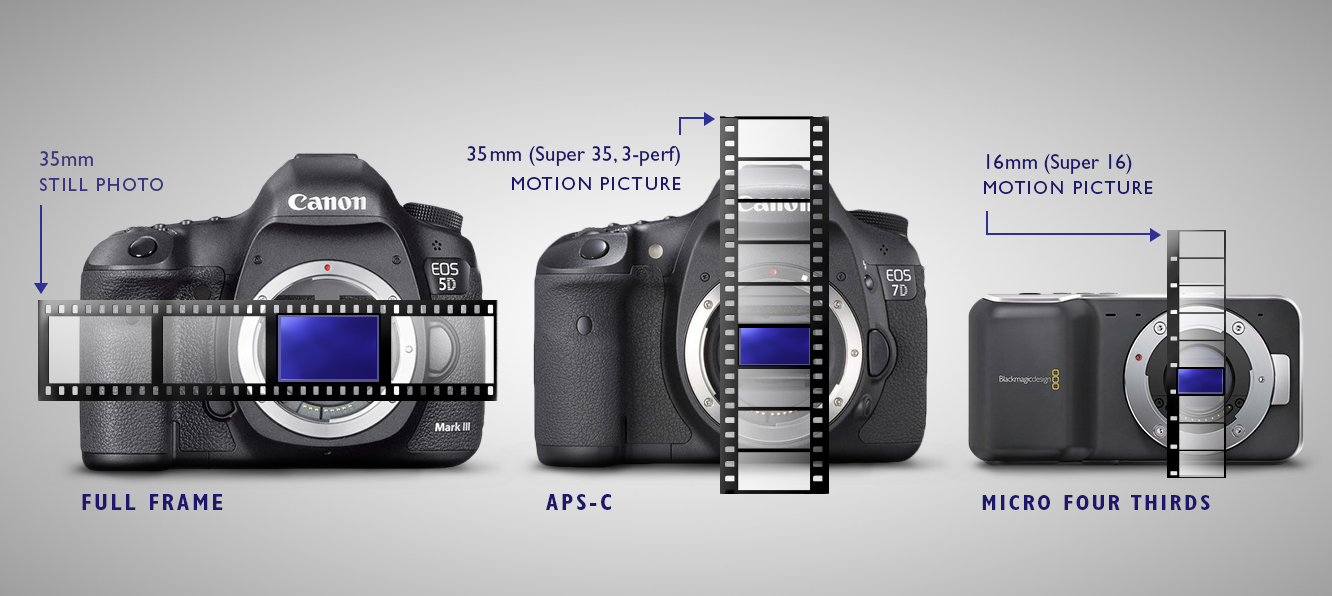
Из-за этого слегка переэкспонированные изображения, известные как Expose to the Right или ETTR, обеспечивают более высокое отношение сигнал / шум и общее лучшее качество изображения при условии, что самые яркие пиксели не «обрезаны» или «выдуваются».
Я показываю эту концепцию в третьем видео вверху страницы.
В некоторых сценариях съемки, таких как съемка звезд, Млечного Пути и ночного неба, уровни освещенности настолько низкие, что шум изображения будет очень высоким. Даже самый лучший датчик камеры для слабого освещения, такой как модели Sony, все равно производит некоторый шум.
Используя простые методы шумоподавления, в Photoshop очень легко решить эту проблему.
Динамический диапазон, ISO и размер сенсора
Следующее видео дополняет этот раздел и обсуждает влияние ISO на динамический диапазон и качество изображения.
Динамический диапазон определяется как разница или диапазон между самым сильным неискаженным сигналом (самое яркое тональное значение) и самым слабым неискаженным сигналом (самым темным тональным значением), зафиксированным датчиком изображения на одной фотографии.
Чем больше динамический диапазон, тем больший диапазон значений тонов и цветов может захватить и отобразить каждое изображение.
Например, камера с расширенным динамическим диапазоном может снимать прямо на ярком солнечном свете и по-прежнему собирать информацию из темных областей тени, не производя большого шума. Это показано на видео выше.
Это показано на видео выше.
Большие физические размеры сенсора в сочетании с большим количеством мегапикселей обеспечивают повышенную производительность камеры с меньшим уровнем шума, особенно в условиях низкой освещенности.
Диаметр диафрагмы и скорость затвора определяют количество света, улавливаемого каждым пикселем, увеличивая или уменьшая силу сигнала.
ISO определяет усиление сигнала и собственный шум. ISO также определяет, сколько света требуется для оптимальной экспозиции.
Более высокие значения ISO = меньше света для сцены = меньшее соотношение сигнал / шум = меньший динамический диапазон = больше шума изображения
Меньшие значения ISO = требуется больше света сцены = более высокое отношение сигнал / шум = больший динамический диапазон = меньше шума изображения.
На графике выше ISO увеличивается, что усиливает базовый собственный шум, видимый в столбце Base ISO.
По мере увеличения ISO требуется меньше общего света (сигнала) для получения того же тонального значения.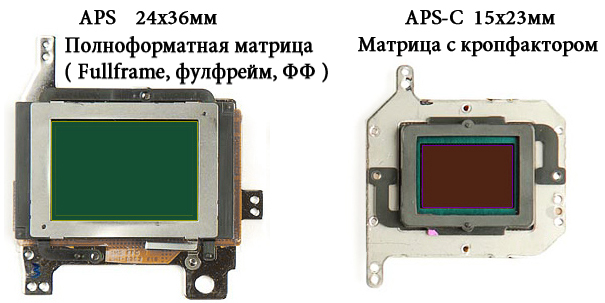 По мере увеличения ISO уровни шума усиливаются, создавая больше общего шума на изображении.
По мере увеличения ISO уровни шума усиливаются, создавая больше общего шума на изображении.
По мере увеличения ISO количество неискаженного сигнала, отражающего динамический диапазон, также уменьшается.
Независимо от камеры, более высокие значения ISO всегда будут производить больше общего шума и меньше общего динамического диапазона в окончательном файле RAW.
В отличие от числа мегапикселей, больший динамический диапазон всегда является положительным атрибутом камеры. Динамический диапазон указан в стопах, что является мерой освещенности. При каждом увеличении остановки количество собираемой световой информации удваивается.
В настоящее время Sony производит датчики с самым высоким динамическим диапазоном на рынке для полнокадровых камер. Эти датчики камеры рассчитаны примерно на 14,8 ступени. По этой причине многие камеры Nikon используют датчики Sony.
Эти новые датчики также производят чрезвычайно низкий уровень шума при очень высоких значениях ISO, таких как 5000 или 6400.
Canon продолжает производить свои собственные сенсоры, у которых значительно не хватает динамического диапазона, сравнительно с оценкой примерно 11,8 ступени для их топовых моделей камер. Они также производят гораздо больший шум при высоких значениях ISO.
Это научный факт, неоспоримый. Sony делает сенсоры лучше, чем Canon, для пейзажной и уличной фотографии.
Рекомендации по камерам и датчикам
У каждого фотографа разные требования к размеру сенсора для получения желаемых изображений.Я не собираюсь рассказывать вам, какую камеру покупать, но приведу некоторые из моих личных фаворитов.
Понимание того, как на самом деле работают датчики камеры, и самостоятельные эксперименты — лучший способ выяснить, какой размер камеры и датчика лучше всего соответствует вашим потребностям.
Я пейзажный и уличный фотограф. Я не снимаю свадьбы для клиентов и не работаю с продуктами. Поэтому я не могу рекомендовать камеры, которые не тестировал лично.
При этом я с радостью порекомендую несколько различных моделей камер для пейзажных фотографов и фотографов природы.Возможно, они не относятся к вам, но они могут помочь снизить усталость от принятия решений. Они могут работать и для других сфер фотографии, но я не могу этого гарантировать 🙂
Вы также можете посетить страницы с рекомендациями по камерам и объективам «Что в моей сумке для камеры» и «Ночная фотография» на этом сайте.
СОВЕТ ПРОФЕССИОНАЛА: Если вы действительно любите фотографировать, купите лучшую камеру, которую вы можете себе позволить. Тогда вам не придется обновляться несколько раз в ближайшие годы. В конечном итоге это экономит деньги.Знаю по опыту…
Я считаю, что Sony делает отличные бюджетные модели с отличными сенсорами. В их моделях высокого класса есть фантастические сенсоры, но они сделаны из пластика и дешевы. Я предпочитаю Nikon высшего класса с металлическими корпусами и такими же сенсорами Sony. Это мое личное предпочтение.
Вот несколько рекомендаций камеры, от самой дешевой до самой дорогой, кадрирование до полного кадра.
- Sony a5100
- Sony Alpha a6300
- Никон D610
- Nikon D750 — Фантастическая камера, особенно по цене.Я настоятельно рекомендую эту камеру всем, кому нужен полнокадровый корпус без стоимости D810. Не так хорошо, но близко.
- Sony A7R — Отличный сенсор и качество изображения. Фантастическая легкая камера для путешествий, если вы не думаете, что ее слишком много. Я думаю, что эти тела кажутся дешевыми и легко повреждаемыми. Я не доверяю им для пеших прогулок и альпинизма.
- Sony A7RII — Обновленная версия модели выше. Те же мысли…
- Nikon D800 (Моя резервная камера) — Я чувствую то же самое к этой камере, что и к D810, описанной ниже.Динамический диапазон не такой хороший, но все же во всем отличная камера.
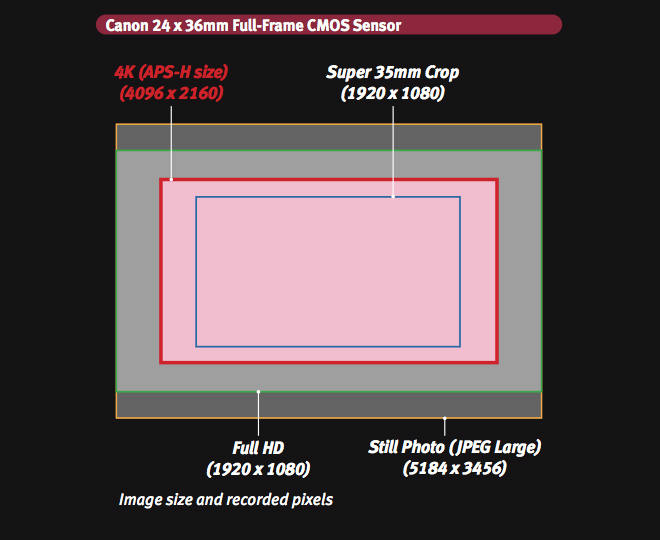 Я не ношу эту резервную копию для пеших прогулок / путешествий. Это резервная камера для дальних фотопутешествий. Раньше это была моя основная камера, и последние 6 лет она отлично работала.
Я не ношу эту резервную копию для пеших прогулок / путешествий. Это резервная камера для дальних фотопутешествий. Раньше это была моя основная камера, и последние 6 лет она отлично работала. - Nikon D810 (Моя основная камера) — Большой динамический диапазон и низкий уровень шума при высоких значениях ISO. Прочный металлический корпус идеально подходит для альпинизма и альпинизма. Я настоятельно рекомендую эту камеру всем фотографам-пейзажистам, которые ожидают, что их оборудование будет работать на высшем уровне и в то же время выдержать все испытания.
Прочитать следующее руководство для серии
Эта страница является частью моей серии руководств по основам фотографии.
Нажмите и просмотрите следующие страницы серии
Размер пикселя и матрицы, его разрешение и апертура в камере смартфона
Популярность смартфонов стремительно растет уже более 10 лет. Конечно, компании адекватно реагируют на огромный спрос, постоянно совершенствуя свои модели.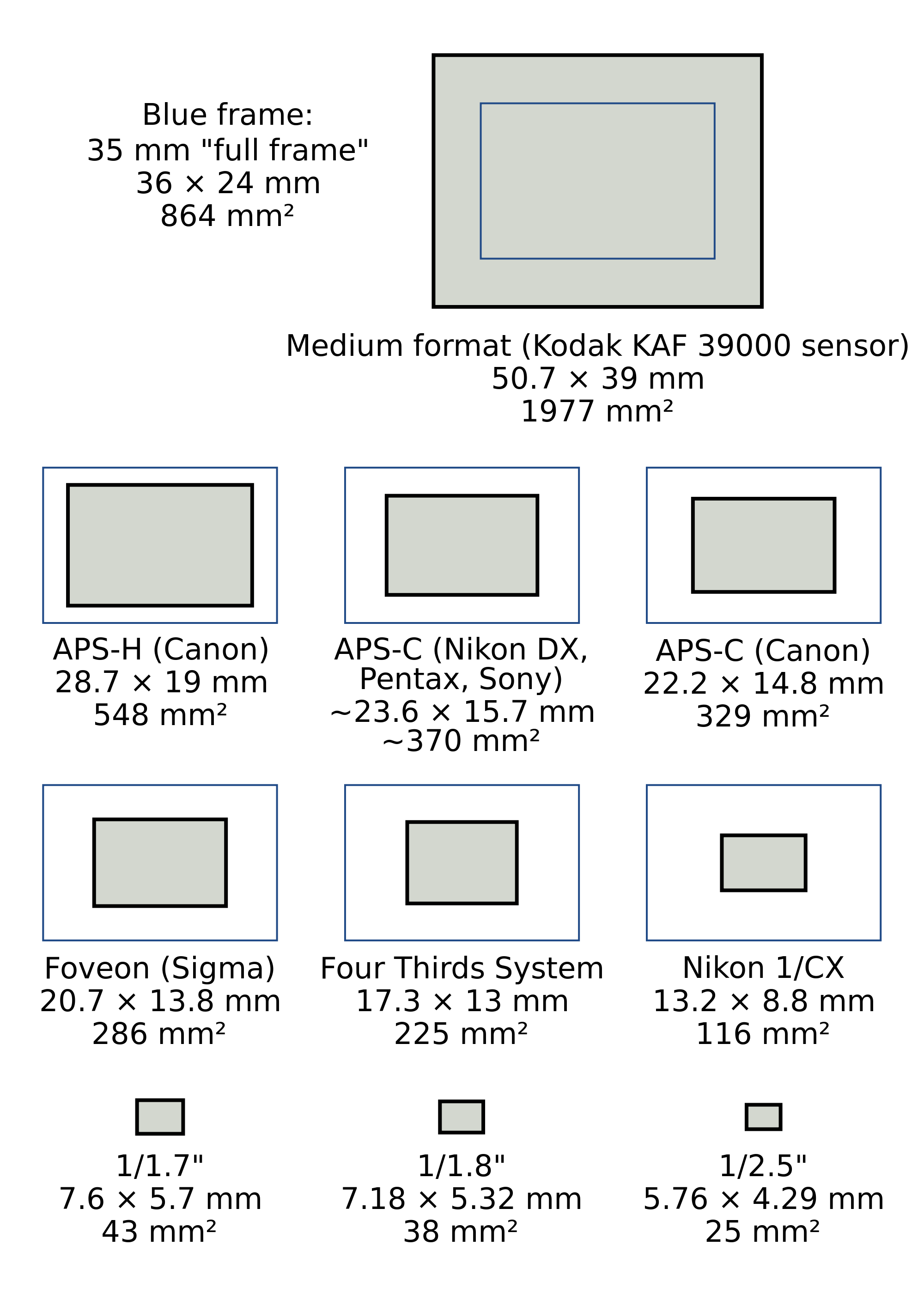 Традиционно конкурентоспособность любого устройства зависит от его цены, функциональности и характеристик.Цена и функциональность в этой статье не рассматриваются. Но в целом конкуренция вынуждает компании интенсивно расширять функциональность и проводить гибкую ценовую политику. В итоге современный бюджетный смартфон стоимостью несколько сотен долларов уже предоставляет возможности, которые кажутся безграничными по сравнению с моделями 5-летней давности.
Традиционно конкурентоспособность любого устройства зависит от его цены, функциональности и характеристик.Цена и функциональность в этой статье не рассматриваются. Но в целом конкуренция вынуждает компании интенсивно расширять функциональность и проводить гибкую ценовую политику. В итоге современный бюджетный смартфон стоимостью несколько сотен долларов уже предоставляет возможности, которые кажутся безграничными по сравнению с моделями 5-летней давности.
Blackview MAX 1 Projector Мобильный телефон с проектором, режим рабочего стола в Android Q 10 и складные смартфоны прекрасно иллюстрируют эту тенденцию. Фактически современный смартфон превратился в универсальный карманный компьютер с достаточно качественными мультимедийными функциями, включая камеру, проектор и т. Д.
Конечно, конкурентоспособность требует постоянного улучшения всех компонентов, включая производительность смартфона, камеру, память смартфона, ОС, экран и т. Д. В частности, улучшение камер развивается в двух направлениях.
Во-первых, компании увеличивают количество различных фотоаппаратов, расширяя возможности съемки. В результате современные многокамерные смартфоны обеспечивают высокое качество изображения при съемке практически в любых условиях. Список самых популярных дополнительных модулей включает камеры Ultra-Wide, Telefoto, Depth и ToF.
Сегодня даже в бюджетных моделях часто используются две камеры. Современные флагманы обычно имеют три и более модулей. Более того, Sony анонсировала смартфон с невиданными ранее 8 камерами.
Во-вторых, компании продолжают традиционно улучшать основные характеристики матриц и линз. В данной статье предлагается более подробный анализ этого аспекта.
Разрешение, размер пикселя и апертура
Как известно, матрица формирует изображение с помощью светочувствительных ячеек (фотодатчиков).1 МП соответствует миллиону фотодатчиков на матрице. Они определяют разрешение матрицы и напрямую влияют на качество изображения.
Несколько лет назад в смартфонах в основном использовалась 0,5-, 1,3-мегапиксельная или 2-мегапиксельная матрица. Лишь у некоторых флагманов были камеры на 5 МП. Стремительное развитие технологии производства фотосенсоров в корне изменило ситуацию. В современных моделях уже используются матрицы с разрешением от 8 МП до 40 МП и даже больше.
Размер пикселя напрямую влияет на количество поглощенных фотонов во время экспонирования.Соответственно, эффективность захвата потока фотонов различна для матриц с разными размерами пикселей. Этот фактор напрямую влияет на качество изображения. Его градации:
— 1,55 мкм-1,40 мкм — высокое качество даже при слабом освещении;
— 1,40 мкм-1,22 мкм — высокое качество при нормальном освещении, шумы изображения при слабом освещении;
— 1,12 мкм или меньше — высокое качество только при ярком освещении.
Но увеличение размера пикселя при том же разрешении требует увеличения размера матрицы и оптики, что увеличивает толщину и ширину смартфона. Поэтому компании вынуждены постоянно искать компромиссные решения.
Поэтому компании вынуждены постоянно искать компромиссные решения.
Яркие детализированные изображения требуют мощного светового потока, который зависит от диафрагмы (степени открытия объектива).
Соответственно, широкая апертура поглощает больше светового потока. Его размер обозначается буквой «f». Широкая диафрагма обеспечивает макросъемку, эффект боке и т.д.
Влияние диафрагмы на качество:
— f / 2.6, f / 2.4 — низкое качество;
— f / 2.2, f / 2.0 — обычно используются в бюджетных моделях;
— ф / 1.8, f / 1,7, f / 1,6 — оптимальная диафрагма.
Размер датчика изображения
Матрица представляет собой микросхему со светочувствительными фотодиодами. Как известно, фотодиод под действием света формирует электрический сигнал, который впоследствии преобразуется в цифровой сигнал. Фактически матрица выполняет функцию пленки в традиционных фотоаппаратах. В дальнейшем информация об изображении поступает в процессор, который преобразует его и отправляет в хранилище смартфона. В среднем этот процесс длится 0.2-0,3 секунды.
В среднем этот процесс длится 0.2-0,3 секунды.
При этом качество картинки напрямую зависит от размера матрицы.
В современных моделях используются матрицы со следующей диагональю:
— 1/3 ″ — бюджетные смартфоны;
— 1 / 2,9 ″, 1 / 2,8 ″ — модели среднего уровня;
— 1 / 2,6 ″, 1 / 2,3 ″ — флагманские смартфоны.
Например, диагональ 12-мегапиксельной матрицы Sony IMX386 в Xiaomi Mi Mix 2 составляет 1 / 2,9 ″ (6,2 мм), а размер пикселя — 1,25 мкм.
Соотношение размера матрицы и пикселя
Конечно, большое количество пикселей (разрешение) требует увеличения их плотности.
Но для постоянного размера матрицы это требует уменьшения размера пикселей с уменьшением поглощения света каждым из них. Таким образом, только выбор оптимального соотношения сторон может обеспечить максимальное качество изображения.
Из маркетинговых соображений большинство компаний часто не указывают размер пикселей, указывая только разрешение матрицы. Но разрешение не характеризует эффективность светопоглощения, а, как следствие, реальное качество изображений.
Но разрешение не характеризует эффективность светопоглощения, а, как следствие, реальное качество изображений.
Сегодня компании экспериментируют с этим соотношением.Samsung Galaxy S6 отлично продемонстрировал очень удачное сочетание.
При тех же характеристиках он явно выигрывает по сравнению с iPhone 6.
Кроме того, Samsung Galaxy S7, S8, S9 с 12-мегапиксельной матрицей также демонстрируют отличное качество за счет большого размера пикселей.
Технология Super Pixel (Quad Pixel, Quad Bayer, TetraCell)
Достигнув огромного разрешения (48 мегапикселей, 64 мегапикселя и более), компании начали искать другие способы дальнейшего улучшения камеры.В результате была разработана технология Super Pixel с использованием Pixel Binning. Фактически, этот алгоритм объединяет четыре маленьких пикселя в один большой пиксель с помощью фильтров.
Практически все лидеры используют эту технологию. Sony называет это Quad Bayer, Samsung использует термин TetraCell.
Смешивание пикселей устраняет проблему недостаточного освещения. Алгоритм объединяет данные RAW из четырех пикселей в один эффективный суперпиксель, обеспечивая максимальное количество захваченного света при одновременном снижении шума изображения.
Конечно, это снижает реальное разрешение изображения. Например, 24-мегапиксельная камера с технологией Super Pixel может обеспечить реальное разрешение всего 6 мегапикселей. Поэтому камеры с низким разрешением редко используют эту опцию. Его эффективность проявляется в 40-мегапиксельных матрицах и выше. В этом случае алгоритм улучшает качество в условиях низкой освещенности за счет уменьшения чрезмерного разрешения.
Помимо уменьшения разрешения, эта технология также исключает вывод в формате RAW (DNG) из-за потери данных во время объединения пикселей.
OIS и автофокус
Многие современные камеры используют OIS (оптическую стабилизацию изображения) для увеличения четкости и улучшения фокусировки при съемке в движении или при слабом освещении.
Фактически, OIS обеспечивает амортизацию для компенсации перемещений камеры во время движения. Механизм оптической стабилизации сглаживает дрожание рук или движение при ходьбе. Функционально OIS заменяет традиционный штатив.
В бюджетных моделях часто используется цифровая стабилизация вместо более эффективной и дорогой оптической стабилизации.В этом случае алгоритм сглаживает градации размытых кадров.
Кроме того, почти все современные фотоаппараты имеют автофокусировку на одном или нескольких объектах. Сегодня компании используют контрастный, фазовый и лазерный автофокус. Но лазерный автофокус обеспечивает максимальную эффективность.
Заключение
1. Разрешение датчиков изображения в камерах смартфонов практически достигло максимума. Его дальнейшее увеличение уже ограничено уменьшением захваченного света из-за уменьшения размера пикселя.Судя по всему, дальнейшее совершенствование камер будет основано на увеличении размера матрицы и улучшении алгоритмов обработки сигналов.
2. С другой стороны, даже среднебюджетные модели обеспечивают достаточно высокое качество для любительской фотографии. Многие дорогие смартфоны уже успешно конкурируют с традиционными фотоаппаратами за качество изображения.
В этом видео демонстрируется новейший инновационный датчик изображения Sony IMX686 для смартфонов.
Раз и навсегда демистификация сенсоров цифровых фотоаппаратов
Душа цифровой камеры — это ее сенсор. Для определения размера изображения, разрешения, характеристик при слабом освещении, глубины резкости, динамического диапазона, линз и даже физического размера камеры сенсор играет ключевую роль.
Датчик изображения — это твердотельное устройство, часть аппаратного обеспечения камеры, которая улавливает свет и преобразует то, что вы видите в видоискателе или ЖК-мониторе, в изображение. Думайте о сенсоре как о электронном эквиваленте пленки. С пленочными фотоаппаратами вы можете выбирать из сотен брендов пленки, каждая из которых имеет свои уникальные и узнаваемые характеристики. В цифровых камерах большая часть этой технологии встроена в аппаратное обеспечение, и вы можете применять специальные эффекты, похожие на пленки, позже с помощью программного обеспечения.
Матрица камеры определяет, насколько хорошо выглядят ваши изображения и насколько велико их масштабирование или печать. Качество изображения зависит не только от размера сенсора, но и от того, сколько миллионов пикселей (светочувствительных фотосайтов) помещается на нем, и от размера этих пикселей.
Размер сенсора также влияет на то, что вы видите в видоискателе — на соотношение между тем, что вы снимаете, и тем, что на самом деле записывается в кадре и передается на карту памяти.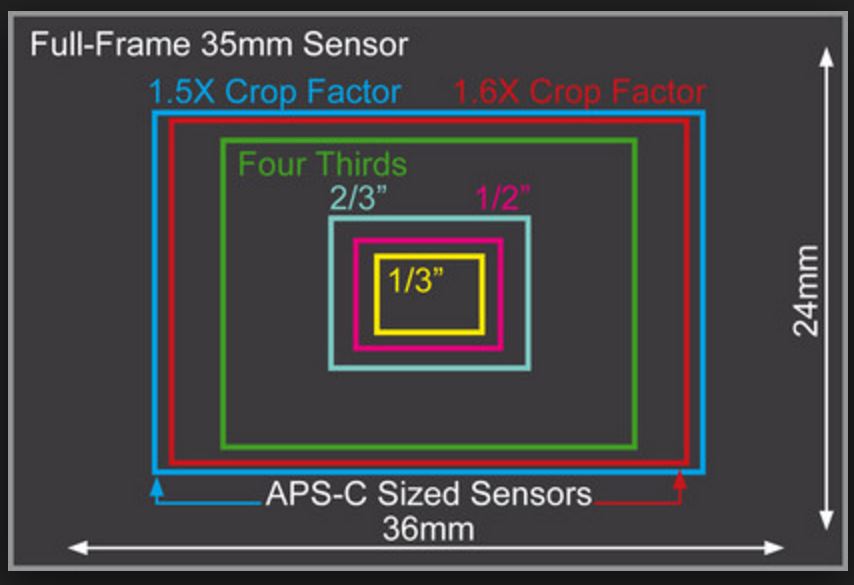
Еще не запутались? Не будет. Даже если вы не отличите ПЗС-матрицу от КМОП от Четверти трети от APS-C, это руководство разбивает этот устрашающий алфавитный суп и проводит вас через датчики, с которыми вы, вероятно, столкнетесь.
Canon Датчик Canon APS-CТипы датчиков
Наиболее распространенными типами датчиков являются CCD (устройство с заряженной связью) и CMOS (комплементарный металл – оксид – полупроводник).
ПЗС-матрица — одна из старейших технологий захвата изображения для цифровых фотоаппаратов, которая уже давно предлагает превосходное качество изображения по сравнению с КМОП-датчиками, с лучшим динамическим диапазоном и контролем шума.Хотя ПЗС-матрица по-прежнему широко используется в бюджетных компактных моделях, ее базовая конструкция и повышенное энергопотребление по большей части побудили производителей камер заменить ее на альтернативы КМОП.
CMOS считалась худшим конкурентом CCD, но современные датчики CMOS были модернизированы, чтобы соответствовать стандарту CCD и даже превосходить его. Имея больше встроенных функций, чем ПЗС-матрицы, КМОП-сенсоры работают более эффективно, потребляют меньше энергии и лучше работают в высокоскоростных режимах серийной съемки.
Новый датчик Foveon X3, основанный на технологии CMOS, используется только в компактных камерах и зеркальных фотокамерах Sigma. Live MOS — это торговая марка датчиков изображения, которые Leica, Olympus и Panasonic используют в зеркальных фотокамерах системы Four Thirds, которые они производят с 2006 года. По сообщениям, эти датчики обеспечивают качество изображения CCD при более низком энергопотреблении, чем у CMOS.
Размеры сенсора
Nikon D610 имеет полнокадровый сенсор. Полнокадровый (36 мм на 24 мм): Самый большой размер сенсора называется полнокадровым, так как он совпадает с кадром 35-мм пленки.Полнокадровые сенсоры почти вдвое больше сенсоров APS-C. Множество зверей профессионального уровня, таких как Nikon D800, Canon EOS 5D Mark III и Nikon D4, имеют полнокадровые сенсоры. Однако за последний год меньшие по размеру камеры с фиксированным объективом, такие как Sony Cyber-shot RX1, также оснащены полнокадровыми датчиками. Sony Alpha SLT-A99, камера, похожая на цифровую зеркальную камеру, которая имеет фиксированное полупрозрачное зеркало, а не зеркало, которое переворачивается назад, чтобы сделать снимок, также является полнокадровой моделью.
Множество зверей профессионального уровня, таких как Nikon D800, Canon EOS 5D Mark III и Nikon D4, имеют полнокадровые сенсоры. Однако за последний год меньшие по размеру камеры с фиксированным объективом, такие как Sony Cyber-shot RX1, также оснащены полнокадровыми датчиками. Sony Alpha SLT-A99, камера, похожая на цифровую зеркальную камеру, которая имеет фиксированное полупрозрачное зеркало, а не зеркало, которое переворачивается назад, чтобы сделать снимок, также является полнокадровой моделью.
С полнокадровыми датчиками у вас нет кроп-фактора, поэтому то, что вы видите в видоискателе, вы снимаете.Более крупные сенсоры в полнокадровых моделях в сочетании с объективами с широкой диафрагмой могут обеспечить чрезвычайно малую глубину резкости, что отлично подходит для макросъемки и работы с видео. Как правило, чем больше датчик, тем больше корпус камеры и тем больше объективы, необходимые для его использования, хотя это начинает меняться.
APS-H (28,7 мм на 19 мм): APS (датчик с активными пикселями) является наиболее популярным типом датчика как для камер со сменным объективом, так и для высококачественных камер с фиксированным объективом, и он присутствует у значительной части потребителей.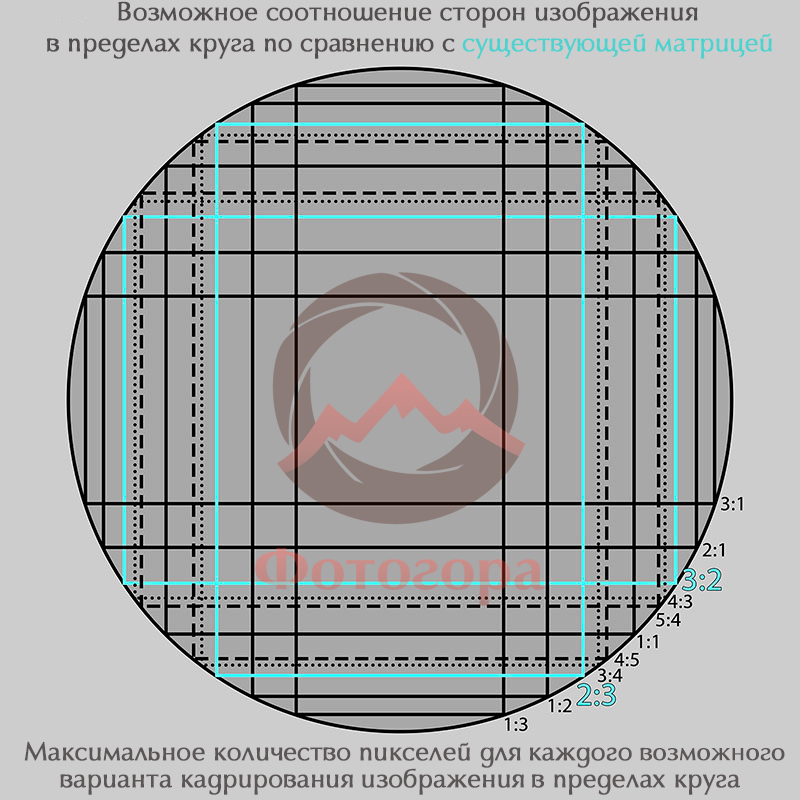 и просьюмерские зеркалки.Тип APS-H сочетает в себе сравнительно большой сенсор с умеренным количеством пикселей для повышения скорости и производительности ISO. К установленным объективам применяется кроп-фактор 1,3x. Canon 1D Mark IV и Canon 1D Mark III имеют такой датчик.
и просьюмерские зеркалки.Тип APS-H сочетает в себе сравнительно большой сенсор с умеренным количеством пикселей для повышения скорости и производительности ISO. К установленным объективам применяется кроп-фактор 1,3x. Canon 1D Mark IV и Canon 1D Mark III имеют такой датчик.
APS-C (23,6 мм на 15,8 мм): Большинство профессиональных зеркальных фотокамер для профессиональных и энтузиастов от Canon, Nikon, Pentax и Sony используют датчик APS-C, но не все Датчики APS-C одинаковы. Датчик Canon APS-C имеет размер 22.2 мм на 14,8 мм, в то время как версии Sony, Pentax, Fujifilm и Nikon (DX) варьируются от 23,5 мм на 15,6 мм до 23,7 мм на 15,6 мм. В камерах Ricoh GR (23,7 мм на 15,7 мм), Canon EOS M (22,3 мм на 14,9 мм), линейки Sony NEX и Fujifilm используются датчики APS-C.
Four Thirds (17,3 мм на 13 мм): Примерно четверть размера полнокадрового сенсора, Four Thirds — это открытый стандарт DSLR, созданный Olympus и Kodak и используемый во всех Olympus и Panasonic Four Thirds и Micro Цифровые зеркальные камеры Four Thirds.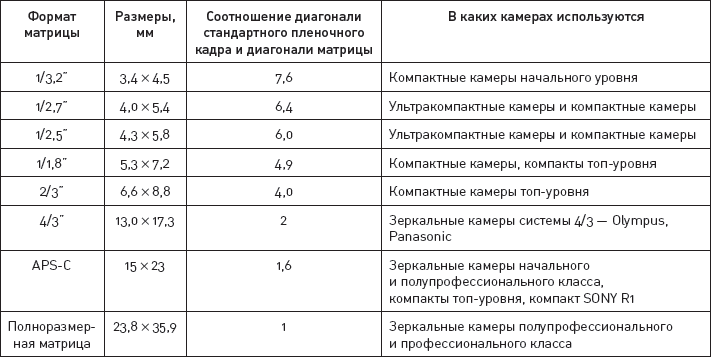 Он имеет двукратный кроп-фактор, который вдвое увеличивает эффективное фокусное расстояние установленного объектива. Новый Olympus OM-D E-M1, Olympus Pen E-PL5 и Panasonic Lumix Gh2 используют этот датчик.
Он имеет двукратный кроп-фактор, который вдвое увеличивает эффективное фокусное расстояние установленного объектива. Новый Olympus OM-D E-M1, Olympus Pen E-PL5 и Panasonic Lumix Gh2 используют этот датчик.
Формат CX (1 дюйм): Объявленный в 2011 году формат CX от Nikon был принят в системе камер Nikon 1. А в 2012 году Sony выпустила карманную цифровую камеру Cyber-shot DSC-RX100, в которой используется 1-дюймовый (13,2 мм на 8 мм) датчик с кроп-фактором 2,7.
Wikimedia CommonsРазмеры сенсора камеры и кроп-факторы.
Маленькие датчики
Последние два размера, перечисленные ниже, не имеют практического смысла. В качестве отправной точки эти определения для маленьких сенсоров основаны на размерах трубок видеокамер, используемых в ЭЛТ-телевизорах примерно в 1950-х годах.
1 / 1,7 дюйма (7,6 мм на 5,7 мм): Среди самых больших размеров датчиков, используемых в компактных камерах, эти датчики позволяют использовать более крупные пиксели для улучшения шумовых характеристик по сравнению со стандартными карманными съемками. Более крупные пиксели лучше справляются с пропусками яркости, чтобы лучше воспроизводить детали изображения.
Более крупные пиксели лучше справляются с пропусками яркости, чтобы лучше воспроизводить детали изображения.
1 / 2,5 дюйма (5,76 мм на 4,29 мм): Этот размер является одним из самых маленьких сенсоров, обычно используемых в недорогих моделях «наведи и снимай». Хотя такие крошечные сенсоры дешевле в производстве, их меньшие пиксели вызывают шум изображения и уменьшают динамический диапазон, что приводит к получению изображений не самого лучшего качества. Тем не менее, результаты могут быть лучше, чем у камеры смартфона, особенно для портретов людей.
Среди других вариаций в этой категории есть 1 / 3,2, 1 / 2,3, 2/3, 1/3.2, 1 / 1,2 и 1 / 1,8. С сенсорами размером всего 1 / 2,7 дюйма (5,37 мм на 4,04 мм) нет ничего удивительного в том, что смартфоны серьезно завоевывают рынок компактных камер.
Что куда идет?
Компактные беззеркальные камеры со сменным объективом, как правило, имеют матрицу различных размеров. Меньшие из них включают сенсор 1 / 2,3 дюйма (6,17 мм на 4,55 мм) в Pentax Q и 1-дюймовый сенсор, используемый в серии Nikon 1. Panasonic Lumix GF5, серия Olympus Pen и OM-D E-M5 имеют 4/3 дюйма стандарта Micro Four Thirds (17.3 мм на 13 мм).
Panasonic Lumix GF5, серия Olympus Pen и OM-D E-M5 имеют 4/3 дюйма стандарта Micro Four Thirds (17.3 мм на 13 мм).
Усовершенствованные компактные камеры с фиксированными объективами, такие как Fuji X100S (23,6 мм на 15,8 мм) и Nikon Coolpix A (23,6 мм на 15,7 мм), оснащены сенсором APS-C. Fujifilm X20 имеет датчик размером 2/3 дюйма (8,8 мм на 6,6 мм), а Canon G1 X имеет датчик 1,5 дюйма (18,7 мм на 14 мм).
Стандартные наводящие камеры, такие как Canon PowerShot SX280 HS и Samsung Galaxy Camera, используют 1 / 2,3-дюймовые сенсоры (6,17 мм на 4,55 мм), в то время как лучшие камеры, такие как Nikon P7700, имеют большую 1/1 .7-дюймовый (7,44 мм на 5,58 мм) датчик.
Смартфоны, такие как iPhone 5s и HTC One, имеют датчик изображения 1/3 дюйма (4,8 мм на 3,6 мм) и меньше пикселей. Nokia Lumia 1020 может похвастаться 1 / 1,5-дюймовым 41-мегапиксельным CMOS-сенсором. Sony Xperia Z1 оснащен 1 / 2,3-дюймовым 20,7-мегапиксельным сенсором. Samsung Galaxy S4 Zoom оснащен 16-мегапиксельным 1 / 2,3-дюймовым сенсором.
Упаковка мегапикселей
Возможно, вы слышали о «мифе о мегапикселях», который гласит, что чем больше мегапикселей ваша камера может разместить на сенсоре, тем лучше будут ваши изображения.Это неправда. Вам нужно не просто больше пикселей, а количество пикселей, соответствующее размеру сенсора. И правильное число зависит от того, что вы собираетесь делать со своими фотографиями. Для массивной обрезки или печати очень большого размера полезно дополнительное разрешение. Для обмена в Интернете или обычной печати разрешение менее важно. Компромиссы включают большие размеры файлов и необходимость большей вычислительной мощности для обработки фотографий с высоким разрешением по сравнению с шумом в изображениях с более низким разрешением.
Меньшие сенсоры, которые собирают пиксели вместе, как правило, хуже работают при слабом освещении и создают шумные артефакты.
На что обращать внимание
По возможности, покупая новую камеру, обращайте внимание на то, какой в ней датчик. Поскольку размер и тип сенсора влияют на столь значительную часть выходной мощности вашей камеры, сенсор имеет решающее значение по размеру, разрешению, работе и цене.
Поскольку размер и тип сенсора влияют на столь значительную часть выходной мощности вашей камеры, сенсор имеет решающее значение по размеру, разрешению, работе и цене.
Источники изображений: Canon, Wikimedia Commons
Примечание. Когда вы покупаете что-то после перехода по ссылкам в наших статьях, мы можем получить небольшую комиссию.Прочтите нашу политику в отношении партнерских ссылок для получения более подробной информации.Размер сенсора и пикселя
Прогрессирующее технологическое развитие сенсоров CCD и CMOS позволяет изготавливать все более тонкие полупроводниковые структуры. Как правило, размеры сенсоров и пикселей уменьшаются, чтобы вырезать все больше и больше сенсоров из одной пластины. Это возможно, потому что чувствительность пикселей также постоянно увеличивается, поскольку шумовые характеристики электроники оптимизируются.
Поскольку в этом отношении также достигнуты технические ограничения, целесообразно сравнить камеры с разными матрицами и размерами пикселей с одинаковым разрешением, особенно если…
- мало света
- требуются изображения с низким уровнем шума и высоким динамическим откликом Предполагается проведение точных измерений
Более крупный сенсор с большими пикселями почти во всех случаях является технически лучшим выбором, однако цена всегда выше.
Размеры сенсоров стандартных камер
Камеры машинного зренияClassic имеют датчики разного размера в зависимости от используемой камеры и разрешения. Большинство камер с меньшими сенсорами используются с так называемой оптикой C-mount или, возможно, CS-mount. Резьба C-mount имеет фактический диаметр 1 дюйм, то есть 25,4 мм, и шаг резьбы 1/32 дюйма.
Датчики, используемые в стандартных камерах, явно меньше по размеру и имеют диагональ изображения от 4 до 16 мм. Размеры этих сенсоров тоже указаны в дюймах.1-дюймовый сенсор имеет диагональ 16 мм.
дюймовые данные ПЗС- и КМОП-датчиков имеют только историческое объяснение: приемные трубки телекамер использовались до середины 1980-х годов и долгое время превосходили ПЗС- или КМОП-датчики, которые были изобретены в конце 1960-х годов.
Фактический преобразователь изображения трубчатых камер был расположен в стеклянной вакуумной трубке, а различные приемные трубки, среди прочего, были классифицированы в соответствии с их внешним диаметром стеклянной колбы. Диагональ светочувствительной поверхности внутри трубки была, конечно, меньше и составляла примерно две трети внешнего диаметра. Эквивалентные ПЗС-сенсоры, которые должны были заменить электронно-лучевые трубки, должны были покрывать именно эту поверхность. ПЗС-матрица, светочувствительная поверхность которой соответствует 1/2-дюймовой трубке, поэтому называлась 1/2-дюймовым сенсором, даже если это не соответствует реальному размеру ПЗС-сенсора.
Диагональ светочувствительной поверхности внутри трубки была, конечно, меньше и составляла примерно две трети внешнего диаметра. Эквивалентные ПЗС-сенсоры, которые должны были заменить электронно-лучевые трубки, должны были покрывать именно эту поверхность. ПЗС-матрица, светочувствительная поверхность которой соответствует 1/2-дюймовой трубке, поэтому называлась 1/2-дюймовым сенсором, даже если это не соответствует реальному размеру ПЗС-сенсора.
В промышленных камерах обычно используются сенсоры 1/3 дюйма при разрешении 640 x 480 пикселей, в камерах с разрешением 1280 x 1024 пикселей — в основном 1/2 дюйма.В довольно популярной камере с разрешением 1600 x 1200 пикселей часто используется сенсор несколько большего размера с размером 1 / 1,8 дюйма с тем же размером пикселя.
В целом на рынке массовых камер наблюдается тенденция к уменьшению размеров сенсоров. Если в конце 1980-х стандартный датчик VGA в некоторых случаях имел размер 2/3 дюйма, то сегодня он составляет всего 1/3 дюйма.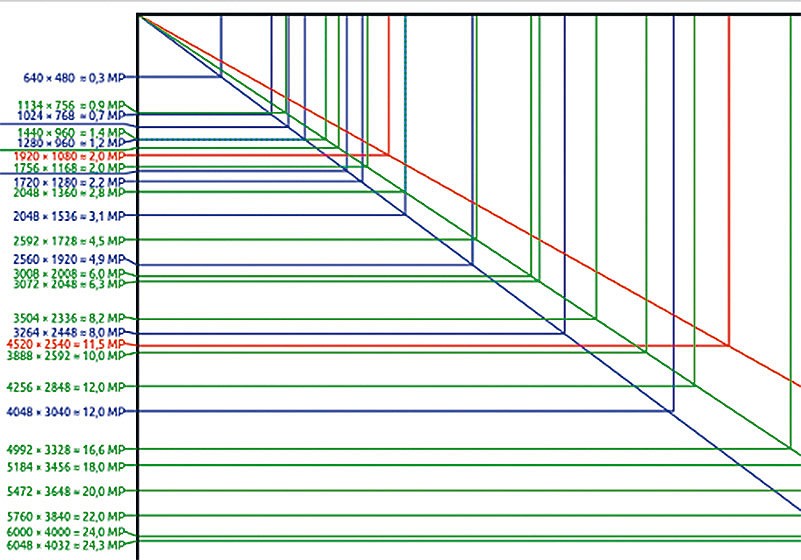 Миниатюризация является следствием усовершенствованных производственных процессов, которые позволяют изготавливать светочувствительные поверхности меньшего размера с (надеюсь) аналогичными характеристиками.Это позволяет производителям изготавливать большее количество датчиков по более низкой цене из одной пластины. Датчик 1/3 дюйма, например, имеет только примерно 40% поверхности датчика 1/2 дюйма и поэтому дешевле.
Миниатюризация является следствием усовершенствованных производственных процессов, которые позволяют изготавливать светочувствительные поверхности меньшего размера с (надеюсь) аналогичными характеристиками.Это позволяет производителям изготавливать большее количество датчиков по более низкой цене из одной пластины. Датчик 1/3 дюйма, например, имеет только примерно 40% поверхности датчика 1/2 дюйма и поэтому дешевле.
Важно: Если у вас есть выбор между большим или меньшим сенсором для той же версии камеры, выберите больший вариант, если вы…
- проводят, например, точные измерения или тончайшие проверки поверхности с минимальным шумом камеры, искажающим результат.
- позволяет планировать светочувствительные быстрые приложения с коротким временем воздействия. В
- используются цветные камеры, которые, возможно, должны заменить монохромные камеры, и, если доступно мало света, они требуют в 3–4 раза больше света, чем сопоставимый монохромный датчик.

Размеры широкоформатных датчиков камер с линейным сканированием или камер с линейным сканированием
В случае камер с высокой разрешающей способностью или камер с линейной разверткой, используются датчики значительно большего размера, размером в несколько сантиметров.Размеры этих датчиков обычно не стандартизированы и являются результатом разрешения и размеров пикселей датчиков. Все разрешено и ограничено только бюджетом.
Линейная камера с 2048 пикселями и размером пикселя 10 мкм имеет длину строки 10,48 мм, в случае размера пикселя 14 мкм длина сенсора составляет уже 28,6 мм. Начиная с диагонали сенсора 20 мм, соединение объектива с байонетом C больше не может использоваться.
В этих фотокамерах обычно используется байонет Nikon (байонет F) или M42 — M72 в качестве соединения объектива.Только в этом случае можно использовать датчики высокого разрешения с большими пикселями для создания камер с линейной разверткой с разрешением до 12 тыс. Пикселей или камер со сканированием по площади с разрешением до 28 миллионов пикселей.
Пикселей или камер со сканированием по площади с разрешением до 28 миллионов пикселей.
Размеры пикселей ПЗС- или КМОП-сенсоров
Вследствие миниатюризации сенсоров размеры пикселей становятся все меньше и меньше. Датчики бытовых фотоаппаратов (от 8 до 12 мегапикселей за 200 евро) сегодня имеют размер пикселей в основном 1,7 мкм, поэтому светоактивная поверхность на пиксель составляет всего примерно 3 мкм2.Это приводит к очень сильному шуму сенсора в случае неоптимальных условий освещения. Для контроля качества с помощью камер это абсолютно недопустимо.
Камеры машинного зрения (с байонетом C) с разрешением от VGA до 2 мегапикселей обычно имеют пиксели от 4,6 до 6,5 мкм с 10-15-кратным увеличением светоактивных поверхностей и, следовательно, явно лучшими результатами сигнала. Если вам нужны изображения с максимально низким уровнем шума и точные результаты измерения, ищите желательно большие пиксели сенсора, даже если эти камеры более дорогие!
Пиксели с длиной края 14 или 10 мкм предпочтительно используются в камерах с линейной разверткой.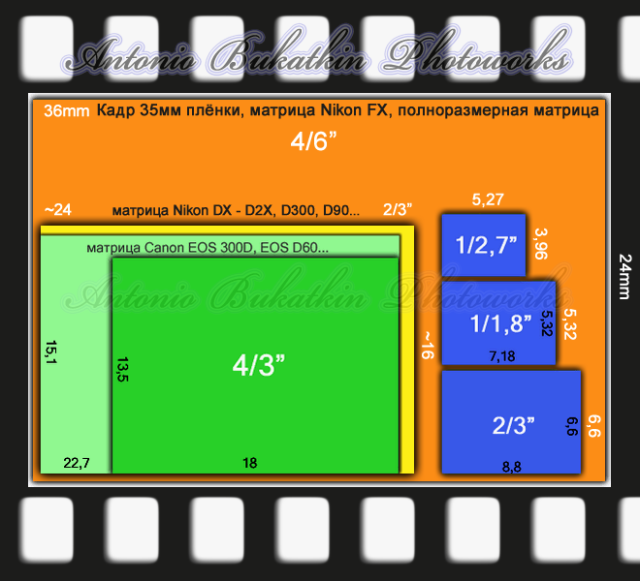 Например, из-за высокой линейной частоты 18 Гц максимальное время экспозиции составляет 1000/18000 = 55 мкс для одной строки захваченного изображения. Светоактивная поверхность пикселя в этом случае никогда не может быть достаточно большой.
Например, из-за высокой линейной частоты 18 Гц максимальное время экспозиции составляет 1000/18000 = 55 мкс для одной строки захваченного изображения. Светоактивная поверхность пикселя в этом случае никогда не может быть достаточно большой.
Полная емкость пикселя
Эта спецификация описывает, сколько электронов может удерживать элемент пикселя, прежде чем он полностью насыщается. Пиксель размером структуры 5,5 мкм может накапливать приблизительно 20 000 электронов, пиксель 7,4 мкм — 40 000 электронов.
Чем больше полная емкость скважины, тем лучше максимальное отношение сигнал / шум.Обычным камерам с размером пикселя 1,7 мкм требуется всего около 1000 фотонов для насыщения пикселей. В случае оцифровки с 8, 10 или даже 12 битами другие шумовые эффекты (фотонный шум, шум оцифровки, темновой шум) уже могут принимать значительные масштабы, мешать сигналу и, таким образом, оказывать крайне негативное влияние на изображение.
Чем больше полная емкость скважины, тем лучше максимальное отношение сигнал / шум.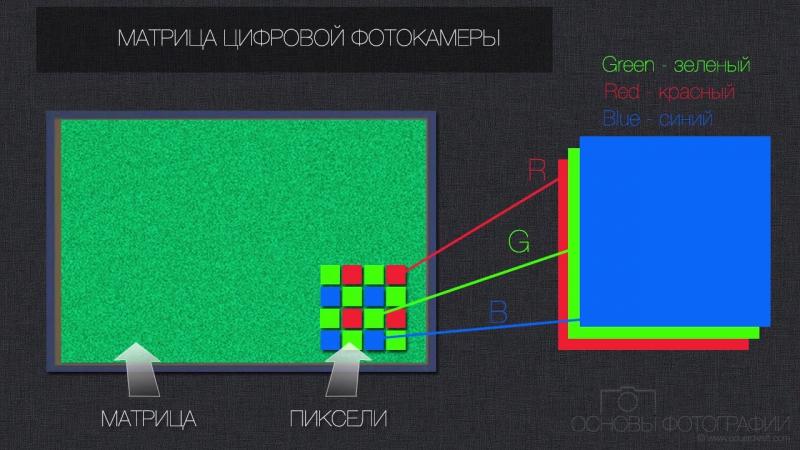 Обычным камерам с размером пикселя 1,7 мкм требуется всего около 1000 фотонов для насыщения пикселей.В случае оцифровки с 8, 10 или даже 12 битами другие шумовые эффекты (фотонный шум, шум оцифровки, темновой шум) уже могут принимать значительные масштабы, мешать сигналу и, таким образом, оказывать крайне негативное влияние на изображение.
Обычным камерам с размером пикселя 1,7 мкм требуется всего около 1000 фотонов для насыщения пикселей.В случае оцифровки с 8, 10 или даже 12 битами другие шумовые эффекты (фотонный шум, шум оцифровки, темновой шум) уже могут принимать значительные масштабы, мешать сигналу и, таким образом, оказывать крайне негативное влияние на изображение.
Важное значение для машинного зрения
- Чем меньше пиксели, тем больше света требуется для захвата изображения. В случае короткого времени проверки недостаток света может легко стать проблемой.
- В случае слабого освещения маленькие пиксели создают явно более зашумленные изображения, чем большие пиксели, динамический отклик изображения уменьшается.Шум мешает работе приложения. Используйте яркое освещение или контроллеры светодиодных вспышек, чтобы было больше света!
- Большое количество мегапикселей не всегда помогает. Маленькие пиксельные структуры требуют высококачественного оптического изображения, то есть линз с высоким разрешением.
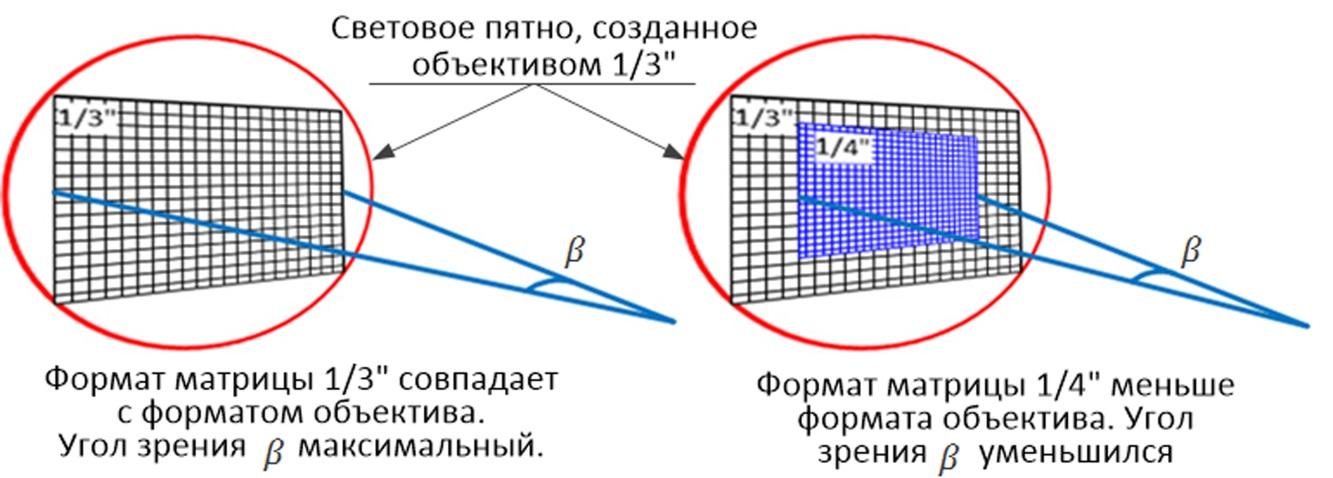 В противном случае создаются размытые изображения с большим количеством пикселей, но без реальных деталей структуры.
В противном случае создаются размытые изображения с большим количеством пикселей, но без реальных деталей структуры. - Маленькие пиксели камеры, кроме того, требуют чрезвычайно точной механической юстировки сенсора, поскольку глубина резкости значительно уменьшается.Наклон сенсора 5 мкм в корпусе должен быть только вдвое меньше (+ / 1 15 мкм при апертуре = 2,8), чем в случае пикселей с размером структуры 10 мкм. Поэтому ищите поставщиков, производящих качественные, иначе лучший сенсор в камере окажется напрасным.
Расчет разрешения сенсора камеры и фокусного расстояния объектива
Как правило, объективы имеют фиксированное фокусное расстояние. Кроме того, обычно рабочее расстояние является гибким, поэтому для простых вычислений начните с отношения рабочего расстояния к фокусному расстоянию.Это позволит вам использовать определенные фокусные расстояния объектива для определения необходимого рабочего расстояния. Если рабочее расстояние ограничено, то, инвертируя это соотношение, мы получаем отношение фокусного расстояния к рабочему расстоянию. Это позволит вам использовать ряд вариантов рабочего расстояния, чтобы получить диапазон фокусных расстояний. Затем после выбора линзы вы можете пересчитать точное необходимое рабочее расстояние.
Это позволит вам использовать ряд вариантов рабочего расстояния, чтобы получить диапазон фокусных расстояний. Затем после выбора линзы вы можете пересчитать точное необходимое рабочее расстояние.
Эти расчеты основаны на следующем уравнении:
Рассчитать фокусное расстояние:
- Пример 4 (Использование гибкого рабочего расстояния): мой FOV составляет 508 мм x 381 мм, размер моего сенсора — 8.47 мм (диагональ). Отношение рабочего расстояния к фокусному расстоянию составляет 381 мм / 8,47 мм = 45: 1. Итак, если я выберу фокусное расстояние 25 мм (что составляет около 1 дюйма), тогда потребуется рабочее расстояние около 1140 мм (45 дюймов). Если максимальное доступное рабочее расстояние составляет 889 мм (35 дюймов), то инвертирование отношения (1:45) дает максимальное фокусное расстояние 35/45 = 19,76 мм (7/9 дюймов), поэтому подойдет фокусное расстояние 16 мм. При обратном вычислении требуемое рабочее расстояние составляет около 711,2 мм (28 дюймов).

- Пример 5 (Использование фиксированного рабочего расстояния): мое поле обзора 609.6 мм x 609,6 мм, мой формат сенсора — 12,7 мм (диагональ), а мое рабочее расстояние — 1016 мм. Чтобы точно определить фокусное расстояние, вам нужно знать соотношение сторон датчика. Если точное значение не требуется, подойдет диагональ. Решив приведенное выше уравнение для фокусного расстояния, получим (12,7X1016) / 609,6 = 21,2 мм. Это не обычное фокусное расстояние объектива, поэтому потребуется либо рабочее расстояние, либо нестандартный объектив, который позволяет пользователю изменять фокусное расстояние.
Объективы производятся с ограниченным количеством стандартных фокусных расстояний.Стандартные фокусные расстояния линз включают 6 мм, 8 мм, 12,5 мм, 25 мм и 50 мм. После того, как вы выбрали объектив, фокусное расстояние которого наиболее близко к фокусному расстоянию, требуемому вашей системой визуализации, вам необходимо настроить рабочее расстояние, чтобы сфокусировать проверяемый объект.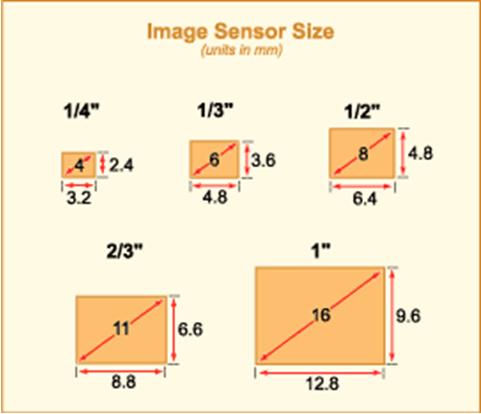
Примечание. Объективы с коротким фокусным расстоянием (менее 12 мм) создают изображения со значительным искажением. Если ваше приложение чувствительно к искажению изображения, попробуйте увеличить рабочее расстояние и используйте объектив с большим фокусным расстоянием.Если вы не можете изменить рабочее расстояние, вы несколько ограничены в выборе объектива.
Используйте инструмент Basler Lens Selector для своей камеры Basler.
| Фактический размер сенсора | Диагональ | Площадь | Соотношение сторон | |
|---|---|---|---|---|
| 1/4 «(~ 3.20 x 2,40 мм) | 4,00 мм | 7,68 мм² | 4: 3 | |
| 1 / 3,6 дюйма (~ 4 x 3 мм) | 5,00 мм | 12,00 мм² | 4: 3 | |
| 1 / 3,4 дюйма (~ 4,23 x 3,17 мм) | 5,29 мм | 13. |
4: 3 | |
| 1 / 3,2 дюйма (~ 4,5 x 3,37 мм) | 5,62 мм | 15,17 мм² | 4: 3 | |
| 1/3 дюйма (~ 4,8 x 3,6 мм) | 6,00 мм | 17,28 мм² | 4: 3 | |
| 1/2.9 дюймов (~ 4,96 x 3,72 мм) | 6,20 мм | 18,45 мм² | 4: 3 | |
| 1 / 2,7 дюйма (~ 5,33 x 4 мм) | 6,66 мм | 21,32 мм² | 4: 3 | |
| 1 / 2,5 дюйма (~ 5,75 x 4,32 мм) | 7,19 мм | 24.84 мм² | 4: 3 | |
| 1 / 2,4 дюйма (~ 5,90 x 4,43 мм) | 7,38 мм | 26,14 мм² | 4: 3 | |
| 1 / 2,35 дюйма (~ 6,03 x 4,52 мм) | 7,54 мм | 27,26 мм² | 4: 3 | |
1/2. 33 дюйма (~ 6,08 x 4,56 мм) 33 дюйма (~ 6,08 x 4,56 мм) |
7,60 мм | 27,72 мм² | 4: 3 | |
| 1 / 2,3 дюйма (~ 6,16 x 4,62 мм) | 7,70 мм | 28,46 мм² | 4: 3 | |
| 1/2 дюйма (~ 6,4 x 4,8 мм) | 8,00 мм | 30.72 мм² | 4: 3 | |
| 1 / 1,9 дюйма (~ 6,74 x 5,05 мм) | 8,42 мм | 34,04 мм² | 4: 3 | |
| 1 / 1,8 дюйма (~ 7,11 x 5,33 мм) | 8,89 мм | 37,90 мм² | 4: 3 | |
| 1/1.76 дюймов (~ 7,27 x 5,46 мм) | 9,09 мм | 39,69 мм² | 4: 3 | |
| 1 / 1,75 дюйма (~ 7,31 x 5,49 мм) | 9,14 мм | 40,13 мм² | 4: 3 | |
| 1 / 1,72 дюйма (~ 7,44 x 5,58 мм) | 9.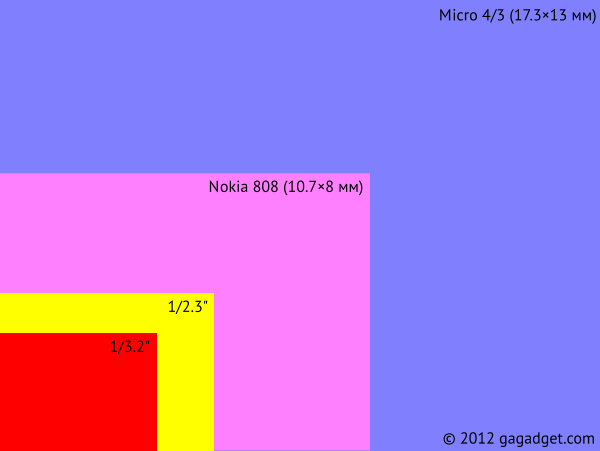 30 мм 30 мм |
41,52 мм² | 4: 3 | |
| 1 / 1,7 дюйма (~ 7,53 x 5,64 мм) | 9,41 мм | 42,47 мм² | 4: 3 | |
| 1 / 1,65 дюйма (~ 7,76 x 5,81 мм) | 9,69 мм | 45,09 мм² | 4: 3 | |
| 1/1.63 дюйма (~ 7,85 x 5,89 мм) | 9,81 мм | 46,24 мм² | 4: 3 | |
| 1 / 1,6 «(~ 8 x 6 мм) | 10,00 мм | 48,00 мм² | 4: 3 | |
| 8,64 x 6 мм | 10,52 мм | 51.84 мм² | 1,44 | |
| 2/3 «(~ 8,8 x 6,6 мм) | 11,00 мм | 58,08 мм² | 4: 3 | |
| 10,82 x 7,52 мм | 13,18 мм | 81,37 мм² | 1,44 | |
1 дюйм (13. 2 x 8,8 мм) 2 x 8,8 мм) |
15,86 мм | 116,16 мм² | 3: 2 | |
| 14 x 9,3 мм | 16.80 мм | 130,20 мм² | 3: 2 | |
| Четыре трети (17,3 x 13 мм) | 21,64 мм | 224.90 мм² | 4: 3 | |
| 18,1 x 13,5 мм | 22,58 мм | 244,35 мм² | 4: 3 | |
| 1,5 дюйма (~ 18,7 x 14 мм) | 23,36 мм | 261,80 мм² | 4: 3 | |
| 20.7 x 13,8 мм | 24,88 мм | 285,66 мм² | 3: 2 | |
| 21,5 x 14,4 мм | 25,88 мм | 309.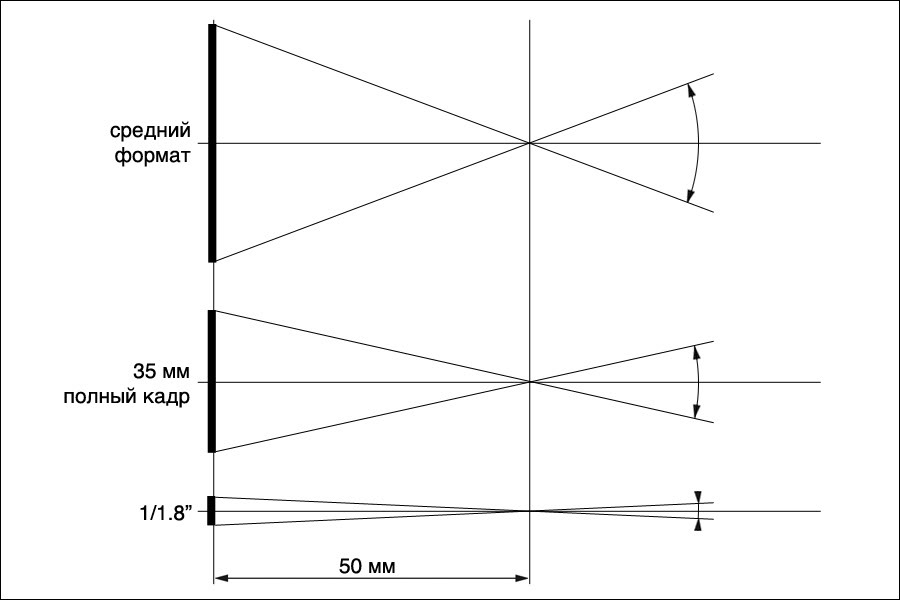 60 мм² 60 мм² |
3: 2 | |
| 22,2 x 14,8 мм | 26,68 мм | 328.56 мм² | 3: 2 | |
| 22,3 x 14,9 мм | 26,82 мм | 332,27 мм² | 3: 2 | |
| 22,4 x 15 мм | 26,96 мм | 336,00 мм² | 3: 2 | |
| 22.5 x 15 мм | 27,04 мм | 337,50 мм² | 3: 2 | |
| 22,7 x 15,1 мм | 27,26 мм | 342,77 мм² | 3: 2 | |
| 22,8 x 15,5 мм | 27,57 мм | 353. |
3: 2 | |
| 23,1 x 15,4 мм | 27,76 мм | 355,74 мм² | 3: 2 | |
| 23 x 15,5 мм | 27,74 мм | 356,50 мм² | 3: 2 | |
| 23.2 x 15,4 мм | 27,85 мм | 357,28 мм² | 3: 2 | |
| 23,4 x 15,6 мм | 28,12 мм | 365,04 мм² | 3: 2 | |
| 23,5 x 15,6 мм | 28,21 мм | 366.60 мм² | 3: 2 | |
| 23,7 x 15,5 мм | 28,32 мм | 367,35 мм² | 3: 2 | |
| 23,6 x 15,6 мм | 28,29 мм | 368,16 мм² | 3: 2 | |
| 23.5 x 15,7 мм | 28,26 мм | 368,95 мм² | 3: 2 | |
| 23,7 x 15,6 мм | 28,37 мм | 369,72 мм² | 3: 2 | |
| 23,6 x 15,7 мм | 28,35 мм | 370.52 мм² | 3: 2 | |
| 23,7 x 15,7 мм | 28,43 мм | 372,09 мм² | 3: 2 | |
| 23,6 x 15,8 мм | 28,40 мм | 372,88 мм² | 3: 2 | |
| 24 x 16 мм | 28.84 мм | 384.00 мм² | 3: 2 | |
| 27 x 18 мм | 32,45 мм | 486,00 мм² | 3: 2 | |
| 27,65 x 18,43 мм | 33,23 мм | 509,59 мм² | 3: 2 | |
| 27.9 x 18,6 мм | 33,53 мм | 518,94 мм² | 3: 2 | |
| 28,7 x 18,7 мм | 34,25 мм | 536,69 мм² | 3: 2 | |
| 28,7 x 19,1 мм | 34,47 мм | 548.17 мм² | 3: 2 | |
| 35,6 x 23,8 мм | 42,82 мм | 847,28 мм² | 3: 2 | |
| 35,7 x 23,8 мм | 42,91 мм | 849,66 мм² | 3: 2 | |
| 35.8 x 23,8 мм | 42,99 мм | 852,04 мм² | 3: 2 | |
| 35,8 x 23,9 мм | 43,04 мм | 855,62 мм² | 3: 2 | |
| 35,9 x 23,9 мм | 43,13 мм | 858.01 мм² | 3: 2 | |
| 36 x 23,9 мм | 43,21 мм | 860,40 мм² | 3: 2 | |
| 35,9 x 24 мм | 43,18 мм | 861,60 мм² | 3: 2 | |
| 36 x 24 мм | 43.27 мм | 864.00 мм² | 3: 2 | |
| 45 x 30 мм | 54,08 мм | 1350.00 мм² | 3: 2 | |
| 44 x 33 мм | 55,00 мм | 1452.00 мм² | 4: 3 | |
 Ему нечего делать с цифровой фотографией.
Ему нечего делать с цифровой фотографией.
Какой размер сенсора камеры для астрофотографии?
Среди фотографов всегда актуальна дискуссия о размере сенсора камеры и о том, какое значение это имеет для их фотографии. В этой краткой статье я расскажу о роли размера сенсора камеры в фотографии, уделяя особое внимание астрофотографии.
Эта тема может очень быстро стать очень технической, и поскольку многие аспекты датчиков, помимо его размера, играют важную роль при рассмотрении общих характеристик датчика, я дам здесь только некоторые общие рекомендации.
[ExpertPhotography поддерживается читателями. Ссылки на продукты на ExpertPhotography являются реферальными. Если вы воспользуетесь одним из них и купите что-нибудь, мы заработаем немного денег. Нужна дополнительная информация? Посмотрите, как все это работает.]
Физический размер обычных типов датчиков
Исторически, эталонный размер сенсора камеры совпадает с размером сенсора старой 35-мм пленки.
Вместо использования физических размеров сенсора при обсуждении и сравнении различных типов сенсоров более часто используемым параметром является так называемый кроп-фактор CP, который гораздо легче запомнить.
CP — это соотношение между размером полнокадрового сенсора (длина и ширина) и размером обсуждаемого сенсора.
Вот кроп-фактор для наиболее распространенных типов датчиков:
- Полнокадровый: CP = 1
- Canon APS-C: CP = 1,6
- Nikon, Pentax, Sony и Sigma APS-C: CP = 1.5
- Panasonic и Olympus MFT: CP = 2
- 1 ″ -тип: CP = 2,72
- 1/3 ″; CP = 7,7
Схема, приведенная ниже, позволяет визуализировать значение кроп-фактора, сравнивая площади различных типов датчиков.
Сравнение размеров сенсора между наиболее распространенными типами цифровых сенсоров и полнокадровым сенсором 35 мм.Что нужно знать о поле зрения и глубине резкости
Размер сенсора камеры, а также фокусное расстояние и диафрагма объектива, расстояние до объекта и т. Д.повлияет на ваши изображения несколькими способами, наиболее очевидным из которых является поле зрения.
Во избежание путаницы при иллюстрации того, как размер сенсора повлияет на ваше изображение, мы поставим себя в определенных условиях, но во всех случаях мы будем предполагать, что фокусное расстояние и диафрагма останутся одинаковыми для всех случаев.
Поле зрения
Вы можете найти подробное обсуждение глубины резкости и поля зрения здесь. Однако для этой статьи все, что вам нужно знать, находится на диаграмме ниже.
При фотографировании одного и того же объекта с того же расстояния с тем же фокусным расстоянием датчики кадрирующей камеры дают меньшее поле зрения. На практике проще говорить об эквивалентных фокусных расстояниях, EFL. Это фокусное расстояние, необходимое для обеспечения того же поля зрения при использовании полнокадрового датчика.
Например, объектив 50 мм на камере Canon APS-C даст поле зрения, эквивалентное объективам 80 мм на полнокадровой камере.
Расчет прост: EFL = FL * CP
Короче говоря, чем меньше размер датчика, тем уже поле зрения и длиннее EFL.
Подробнее о фокусном расстоянии см. В этой статье.
Не нужно быть математиком, чтобы понять это в полевых условиях. Есть много онлайн-калькуляторов, которые вы можете использовать при планировании съемки, или приложений для смартфонов, которые можно использовать в дороге.
Они удобны при создании панорам из сшивания нескольких изображений.
Глубина резкости
Глубина резкости (DoF) связана с переходом фокуса / расфокусировки на изображении.
Технически, когда вы фокусируетесь, вы фокусируетесь на одной плоскости.Все, что находится впереди или позади указанного самолета, не в фокусе.
На самом деле все немного иначе. Мы все еще можем видеть некоторые объекты, которые находятся впереди или позади объекта, как «в фокусе», даже если технически это не так.
Это из-за глубины резкости. DoF представляет собой область вашего кадра, содержимое которой мы воспринимаем как находящееся в фокусе.
Посмотрите на эту диаграмму, чтобы понять, как размер сенсора влияет на глубину резкости, когда фокусное расстояние, диафрагма и охват кадра остаются неизменными.Единственная переменная здесь — это размер сенсора.
На практике это означает, что с датчиком кадрирования может быть сложнее получить красивое боке.
Это очень важно в портретной съемке, где цель — изолировать модель от фона.
Роль размера сенсора в астрофотографии
Как уже неоднократно упоминалось в наших статьях по астрофотографии, звездные пейзажи, звездные тропы, фотографии планет и дальнего космоса являются частью этого жанра.Размер сенсора может по-разному влиять на такие фотографии.
Роль поля зрения в астрофотографии
Поле зрения очевидно так же важно в астрофотографии, как и в любой другой фотографии.
Если вам нравятся звездные пейзажи, вам может быть трудно выйти достаточно широко, чтобы кадрировать весь пейзаж. Или кадрировать и передний план, и Полярную звезду, чтобы получить красивые круглые звездные следы.
Например, на камерах MFT обычное фокусное расстояние для широкоугольных объективов составляет 14 мм (или 12 мм). Это соответствует не очень широким 28 (24) мм на полном кадре.
Чтобы стать шире, нужно покупать довольно дорогие зум-объективы в диапазоне 7-18 мм. Вместо этого вы можете получить объектив типа «рыбий глаз», например, объектив Samyang 7,5 f / 3,5 «рыбий глаз».
С другой стороны, для съемки планет и глубокого неба обрезанный датчик может помочь приблизиться к цели лучше, чем с помощью полнокадровой камеры.
Достаточно недорогой 200 мм на MFT-камере даст такое же поле зрения, как более дорогой, громоздкий и тяжелый 400 мм на полнокадровой камере.
Преимущество использования камеры с кадрированным сенсором состоит в том, что вы можете легко приблизиться к своей цели с помощью относительно компактной и легкой фотографической системы.
Это упростит (и удешевит) работу со следящими установками для отслеживания движения звезд по ночному небу.
Это, пожалуй, основная причина того, почему планетарные камеры имеют маленькие сенсоры 1/3 дюйма. На моем телескопе с фокусным расстоянием 1250 мм, когда я сфотографирован моей камерой MFT (EFL 2500 мм), Юпитер все еще остается яркой безликой точкой, окруженной четырьмя меньшими точками.
Это четыре его крупнейших спутника, галилеевы спутники: Ио, Ганимед, Европа, Каллисто.
Напротив, при использовании моей планетарной камеры ZWO ASI 224MC с 1/3 ″, из-за CP = 7,7 EFL составляет колоссальные 9625 мм.
Юпитер показывает свои цвета, полосы и большое красное пятно.
Глубина резкости и астрофотография
В астрофотографии не стоит беспокоиться о глубине резкости.Луна, планеты, туманности и звезды находятся так далеко, что даже если вы снимаете с диафрагмой f / 1,2, все они будут в фокусе.
На практике, например, и Луна, находящаяся на расстоянии 300 000 км, и Андромеда, находящаяся на расстоянии 2,5 миллионов световых лет, будут в фокусе.
Единственная возможность, где DoF может сыграть роль, — это звездные пейзажи и звездные тропы. То есть, если вы очень близки к элементу переднего плана.
В этом случае вы можете сделать снимок на переднем плане, а затем переместиться, чтобы сфотографировать небо.Вы можете объединить два изображения позже в Photoshop.
Размер пикселя
Часто говорят, что полнокадровые сенсоры лучше работают при слабом освещении. Это связано с тем, что обычно они имеют более крупные пиксели, чем меньшие сенсоры.
На практике мы можем сказать, что для заданной диафрагмы и времени выдержки более крупные пиксели позволят собрать больше фотографий. Это означает меньше шума и более четкое и детальное изображение.
Размер пикселя также связан с динамическим диапазоном сенсора. Чем больше пиксели, тем шире динамический диапазон.Вы сможете лучше записывать резко контрастирующие сцены.
В астрофотографии это полезно, чтобы сохранить цвета ярких звезд или ядра галактики, записывая мельчайшие детали.
Разрешение изображения
Не путать с разрешением в пикселях, оно зависит от размера сенсора (или размера пикселя) и используемого фокусного объектива.
В астрофотографии размеры звезд, туманностей и галактик выражаются как видимые угловые размеры. Разрешение изображения выражается в секундах дуги / пиксель (также обозначается как «/ пиксель»).Это даст вам представление о том, насколько велика часть неба, которую вы запишете на каждый пиксель.
На практике часть неба, записанная в пикселе, не содержит деталей.
Сообщение здесь в том, что низкое разрешение (большое “/ пиксель) приведет к более плавному, но менее детальному изображению. А высокое разрешение изображения (малое “/ пиксель”) даст вам четкие и детализированные изображения.
Недостатком установок с высоким разрешением является то, что плохая видимость (т. Е. Плохие визуальные условия для неба) сводит на нет преимущества такого высокого разрешения.Количество деталей, которые вы можете увидеть, ограничено условиями просмотра.
Кроме того, ошибки слежения будут более заметны в виде удлиненных звезд.
Лучшие камеры для астрофотографии
Принимая во внимание приведенный выше аргумент, мы можем сказать, что лучшими камерами для астрофотографии являются:
- Камеры APS-C или FF для звездных пейзажей и звездных троп. Легко получить достаточно большое поле зрения, они имеют несколько лучшие характеристики при слабом освещении и больший динамический диапазон.
- Для планетарной работы небольшая сенсорная планетарная камера позволяет приблизиться к цели благодаря малому полям обзора. Для фотосъемки
- Deep Sky можно использовать кадрированный датчик, как в камерах MFT. Это сделает вашу фотографическую установку компактной и легкой. Это позволит вам использовать более легкие (и более дешевые) трекинговые крепления.
- С другой стороны, если вы фотографируете с помощью телескопа, то у MFT слишком узкое поле зрения, и лучше всего подойдет полнокадровая камера.
Сказав это, помните, что это очень общие рекомендации.Любая современная камера даст вам хорошие результаты, если вы поймете ограничения и способы их обхода.
Млечный Путь в Зените. Sony RX10, 28 мм, фиксированный штатив. Галактика Андромеды видна в виде небольшого облака в нижней левой части кадра.Заключение
Эта статья — только верхушка айсберга. Такие вещи, как квантовая эффективность, шум чтения, полное разрешение и т. Д., — это другие факторы, которые определяют возможности сенсора, особенно для астрофотографии.
Но это хорошее широкое обсуждение того, как размер сенсора может повлиять на вашу фотографию. И как использовать сенсоры различных размеров для лучшей астрофотографии.
Наконец, помните, что датчики — это электронные устройства. Их производительность может сильно варьироваться с возрастом. Полнокадровый датчик, которому несколько лет, может работать хуже, чем новый датчик APS-C или MFT.
Хотите узнать больше о размере сенсора? Прочтите наш новый пост об эквивалентности в фотографии дальше!