Локатор + лидар для слабовидящих людей своими руками + схема | Своими руками
Содержание ✓
- ✓ ЭЛЕКТРИЧЕСКАЯ ПРИНЦИПИАЛЬНАЯ СХЕМА ЛОКАТОРА ДЛЯ СЛЕПЫХ
- ✓ ВИДЕО ПРИ ПРИНЦИП РАБОТЫ ЛИДАРА
В нашем обыденном мире, где подавляющую часть информации мы получаем визуально, любые трудности со зрением – это серьезная проблема, а полная потеря зрения часто превращается для человека в катастрофу, разделяя мир на «до» и «после», ставя крест на множестве занятий и вариантов времяпрепровождения.
Задачу ориентации в пространстве здоровый решает не задумываясь, а для слепого или слабовидящего она превращается в серьезный, а порой и неразрешимый вопрос. Простейшим стандартным средством реабилитации обычно служит белая тактильная трость. Но кроме нее существуют и электронные дальномеры, которые призваны дополнить «палочку».
В основном, на рынке сейчас присутствуют устройства – по сути, компактные ультразвуковые локаторы – которые отображают расстояние до препятствия интенсивностью вибрации или звуковыми сигналами [1-2]. Подобные конструкции преобладают и среди некоммерческих разработок [3-5]. Альтернативой ультразвуковым дальномерам можно считать приборы, оснащенные инфракрасными дальномерами или маломощными лидерами, а также их комбинаций [6-10].
Подобные конструкции преобладают и среди некоммерческих разработок [3-5]. Альтернативой ультразвуковым дальномерам можно считать приборы, оснащенные инфракрасными дальномерами или маломощными лидерами, а также их комбинаций [6-10].
ВСЕ ЧТО НЕОБХОДИМО ДЛЯ ЭТОЙ СТАТЬИ НАХОДИТСЯ ЗДЕСЬ >>>
Прототипы таких устройств выглядят весьма неказисто, так как изготовить подходящий корпус, по крайней мере, не прибегая к 3В нашем обыденном мире, где подавляющую часть информации мы получаем визуально, любые трудности со зрением – это серьезная проблема, а полная потеря зрения часто превращается для человека в катастрофу, разделяя мир на «до» и «после», ставя крест на множестве занятий и вариантов времяпрепровождения. Задачу ориентации в пространстве здоровый решает не задумываясь, а для слепого или слабовидящего она превращается в серьезный, а порой и неразрешимый вопрос.
Простейшим стандартным средством реабилитации обычно служит белая тактильная трость. Но кроме нее существуют и электронные дальномеры, которые призваны дополнить «палочку». В основном, на рынке сейчас присутствуют устройства – по сути, компактные ультразвуковые локаторы – которые отображают расстояние до препятствия интенсивностью вибрации или звуковыми сигналами [1-2].
В основном, на рынке сейчас присутствуют устройства – по сути, компактные ультразвуковые локаторы – которые отображают расстояние до препятствия интенсивностью вибрации или звуковыми сигналами [1-2].
Подобные конструкции преобладают и среди некоммерческих разработок [3-5]. Альтернативой ультразвуковым дальномерам можно считать приборы, оснащенные инфракрасными дальномерами или маломощными лидерами, а также их комбинаций [6-10].
Прототипы таких устройств выглядят весьма неказисто, так как изготовить подходящий корпус, по крайней мере, не прибегая к зD-печати, – непросто. Тем не менее, в продаже встречаются недорогие корпуса портативных аккумуляторных батарей, предназначенных для подзарядки носимой электроники. Обычно они рассчитаны на несколько (от одного до четырех) литий-ионных аккумуляторов типоразмера 18650.
В лицевой панели корпуса сделано отверстие для модуля VL53L0X, а также отверстия для крепежных винтов
Вес летали локатора размешены в корпусе внешней аккумуляторной батареи. Для питания устройства используется один элемент 18650
Для питания устройства используется один элемент 18650
Причем, если даже установить не все элементы батареи, то такое устройство остается работоспособным. Последнее обстоятельство открывает широкий простор для творчества радиолюбителей: мы получаем качественный корпус заводского изготовления, в котором уже имеется готовая электронная схема для зарядки аккумулятора и место для его размещения. Остается лишь немного доработать корпус под конкретный прибор. И, к слову, сохранить возможность его применения по прежнему назначению в роли внешней аккумуляторной батареи.
Именно таким образом был собран локатор для незрячих, о котором и пойдет речь. В качестве его оболочки использован корпус внешней аккумуляторной батареи, рассчитанный на четыре аккумулятора типоразмера 18650 и имеющий внешние габариты 115x78x23 мм.
Основой конструкции выступает плата Arduino ProMini на базе микроконтроллера ATmega328. Это миниатюрная версия аппаратной платформы Arduino. которая предназначена для установки в готовые устройства.
Для загрузки программы в память микроконтроллера и обмена информацией с компьютером плату необходимо подключить через преобразователь интерфейсов USB-TTL-UART-Serial Ch440G или аналогичный. В данной конструкции применена плата с микроконтроллером, работающим на частоте 8 МГц и рассчитанная на питание постоянным током с напряжением 3,3 В. Это позволяет подключить плату к одному литий-ионному аккумулятору без преобразователя напряжения. Потребляемый ток составляет 40-70 мА в зависимости от режима работы вибромотора.
Литий-ионный аккумулятор G1 типоразмера 18650 подключен через клавишный выключатель SA1 типа SMRS-101-1С2. Аккумулятор большой емкости может запасти достаточно много энергии, и его короткое замыкание небезопасно, поэтому в цепи питания установлен предохранитель FU1, рассчитанный на ток 100 мА.
Дальномером в устройстве работает модуль, основанный на измерителе расстояний VL53L0X. В нем используется инфракрасный лазер, излучающий на длине волны около 940 нм и принадлежащий к лазерам класса 1.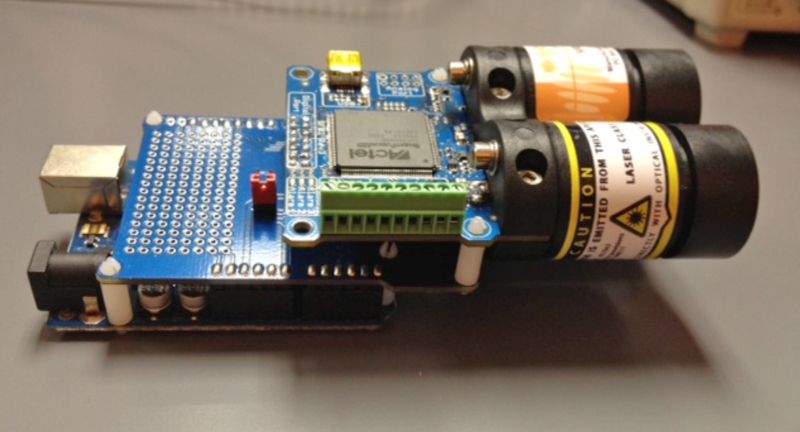 Модуль измерителя можно питать от источника постоянного тока напряжением от 2,6 до 5 В. Для передачи информации используется интерфейс I2C. Между сигнальными цепями и шиной питания включены резисторы R2 и R3 типа МЛТ-0,25 сопротивлением 4,7 кОм, линия SDA подключена к порту А4, a SCL к порту А5 – как этого требуют рекомендации по использованию данного интерфейса [11].
Модуль измерителя можно питать от источника постоянного тока напряжением от 2,6 до 5 В. Для передачи информации используется интерфейс I2C. Между сигнальными цепями и шиной питания включены резисторы R2 и R3 типа МЛТ-0,25 сопротивлением 4,7 кОм, линия SDA подключена к порту А4, a SCL к порту А5 – как этого требуют рекомендации по использованию данного интерфейса [11].
Вибромотор М1 рассчитан на напряжение 3 В и ток 60 мА. Он управляется ШИМ через порт D3 платы Arduino ProMini при помощи транзисторного ключа. Последний выполнен на транзисторе VT1 типа ВС337-16 и резисторе R1 типа МЛТ-0,25 сопротивлением 510 Ом.
В лицевой панели корпуса проделано отверстие для модуля VL53L0X. а также отверстия для крепежных винтов.
Программа, управляющая устройством, создана в среде Arduino IDE.
Влицевой панели корпуса сделано отверстие для модуля VL53L0X, а также от вере! ни для крепежных винюв-печати, – непросто. Тем не менее, в продаже встречаются недорогие корпуса портативных аккумуляторных батарей, предназначенных для подзарядки носимой электроники. Обычно они рассчитаны на несколько (от одного до четырех) литий-ионных аккумуляторов типоразмера 18650.
Обычно они рассчитаны на несколько (от одного до четырех) литий-ионных аккумуляторов типоразмера 18650.
Ссылка по теме: Универсальная лопата для пожилых людей своими руками (фото)
Причем, если даже установить не все элементы батареи, то такое устройство остается работоспособным. Последнее обстоятельство открывает широкий простор для творчества радиолюбителей: мы получаем качественный корпус заводского изготовления, в котором уже имеется готовая электронная схема для зарядки аккумулятора и место для его размещения. Остается лишь немного доработать корпус под конкретный прибор. И, к слову, сохранить возможность его применения по прежнему назначению в роли внешней аккумуляторной батареи.
Именно таким образом был собран локатор для незрячих, о котором и пойдет речь. В качестве его оболочки использован корпус внешней аккумуляторной батареи, рассчитанный на четыре аккумулятора типоразмера 18650 и имеющий внешние габариты 115x78x23 мм.
Основой конструкции выступает плата Arduino ProMini на базе микроконтроллера ATmega328. Это миниатюрная версия аппаратной платформы Arduino. которая предназначена для установки в готовые устройства. Для загрузки программы в память микроконтроллера и обмена информацией с компьютером плату необходимо подключить через преобразователь интерфейсов USB-TTL-UART-Serial Ch440G или аналогичный. В данной конструкции применена плата с микроконтроллером, работающим на частоте 8 МГц и рассчитанная на питание постоянным током с напряжением 3,3 В. Это позволяет подключить плату к одному литий-ионному аккумулятору без преобразователя напряжения. Потребляемый ток составляет 40-70 мА в зависимости от режима работы вибромотора.
Это миниатюрная версия аппаратной платформы Arduino. которая предназначена для установки в готовые устройства. Для загрузки программы в память микроконтроллера и обмена информацией с компьютером плату необходимо подключить через преобразователь интерфейсов USB-TTL-UART-Serial Ch440G или аналогичный. В данной конструкции применена плата с микроконтроллером, работающим на частоте 8 МГц и рассчитанная на питание постоянным током с напряжением 3,3 В. Это позволяет подключить плату к одному литий-ионному аккумулятору без преобразователя напряжения. Потребляемый ток составляет 40-70 мА в зависимости от режима работы вибромотора.
Литий-ионный аккумулятор G1 типоразмера 18650 подключен через клавишный выключатель SA1 типа SMRS-101-1С2. Аккумулятор большой емкости может запасти достаточно много энергии, и его короткое замыкание небезопасно, поэтому в цепи питания установлен предохранитель FU1, рассчитанный на ток 100 мА.
Дальномером в устройстве работает модуль, основанный на измерителе расстояний VL53L0X. В нем используется инфракрасный лазер, излучающий на длине волны около 940 нм и принадлежащий к лазерам класса 1. Модуль измерителя можно питать от источника постоянного тока напряжением от 2,6 до 5 В. Для передачи информации используется интерфейс I2C. Между сигнальными цепями и шиной питания включены резисторы R2 и R3 типа МЛТ-0,25 сопротивлением 4,7 кОм, линия SDA подключена к порту А4, a SCL к порту А5 – как этого требуют рекомендации по использованию данного интерфейса [11].
В нем используется инфракрасный лазер, излучающий на длине волны около 940 нм и принадлежащий к лазерам класса 1. Модуль измерителя можно питать от источника постоянного тока напряжением от 2,6 до 5 В. Для передачи информации используется интерфейс I2C. Между сигнальными цепями и шиной питания включены резисторы R2 и R3 типа МЛТ-0,25 сопротивлением 4,7 кОм, линия SDA подключена к порту А4, a SCL к порту А5 – как этого требуют рекомендации по использованию данного интерфейса [11].
Вибромотор М1 рассчитан на напряжение 3 В и ток 60 мА. Он управляется ШИМ через порт D3 платы Arduino ProMini при помощи транзисторного ключа. Последний выполнен на транзисторе VT1 типа ВС337-16 и резисторе R1 типа МЛТ-0,25 сопротивлением 510 Ом.
В лицевой панели корпуса проделано отверстие для модуля VL53L0X. а также отверстия для крепежных винтов.
Программа, управляющая устройством, создана в среде Arduino IDE.
В лицевой панели корпуса сделано отверстие для модуля VL53L0X, а также отверстие для крепежных винтов
В начале программы подключаются необходимые сторонние библиотеки (1-3 строки кода). Затем в строках с 5-й по 9-ю объявляются глобальные переменные. В их число входят: переменная М – номер порта для подключения транзисторного ключа, управляющего вибромотором М1; переменная РМ для текущего значения ШИМ, определяющего интенсивность работы вибромотора; переменные ij, используемые как счетчики в циклах; переменная dt, определяющая задержку в конце основного цикла программы и переменная distance – для хранения результата измерения расстояния.
Затем в строках с 5-й по 9-ю объявляются глобальные переменные. В их число входят: переменная М – номер порта для подключения транзисторного ключа, управляющего вибромотором М1; переменная РМ для текущего значения ШИМ, определяющего интенсивность работы вибромотора; переменные ij, используемые как счетчики в циклах; переменная dt, определяющая задержку в конце основного цикла программы и переменная distance – для хранения результата измерения расстояния.
Функция l_VL для работы с датчиком VL53L0X располагается в строках с 12-й по 77-ю. В строках 15-17 инициализируются локальные переменные для многократного измерения расстояния и определения медианного среднего по результатам этих измерений [12]. В строках кода с 20-й по 44-ю расположен цикл, в пределах которого происходит 11-кратное измерение расстояния.
В строках 48-53 реализован отладочный цикл, который выводит в последовательный порт массив с результатами измерений (после завершения отладки, в окончательной версии программы его следует убрать или закомментировать). В строках 56-67 происходит сортировка элементов массива методом пузырька. В строках кода с 69-й по 74-й расположен второй отладочный цикл, который выводит в последовательный порт массив с упорядоченными результатами измерений. В строке 76 функция возвращает медианное среднее, полученное по результатам всех измерений.
В строках 56-67 происходит сортировка элементов массива методом пузырька. В строках кода с 69-й по 74-й расположен второй отладочный цикл, который выводит в последовательный порт массив с упорядоченными результатами измерений. В строке 76 функция возвращает медианное среднее, полученное по результатам всех измерений.
В строках 81-104 расположена функция setupQ. В данной функции помещен код для инициализации датчика VL53L0X (код взят из файла Single, который в качестве примера прилагается к библиотеке vl53IOx-arduino-master [13]).
В начале цикла loop() в строке 110 происходит вызов функции l_VL для измерения расстояния. В строке 116 устанавливается значение переменной РМ для управления вибромотором М1 при помощи ШИМ. Необходимое значение ШИМ рассчитывается по формуле РМ = -0.15*distance+215, чтобы при дистанции 100 мм коэффициент заполнения ШИМ
составлял 78%, а при дистанции 1100 мм, соответственно, примерно 20%. Таким образом, на больших расстояниях мотор вибрирует слабо, а по мере приближения к препятствию интенсивность вибрации возрастает.
Так как локатор построен во многом из готовых элементов, то печатная плата нужна только для транзисторного ключа и подтягивающих резисторов интерфейса I2C. Все это упрощает повторение устройства и делает его доступным для начинающих. Как известно, в рядах Всероссийского общества слепых состоит более 200 тыс. человек [14], таким образом, существует немало людей, которым может попытаться помочь любой радиолюбитель.
ЭЛЕКТРИЧЕСКАЯ ПРИНЦИПИАЛЬНАЯ СХЕМА ЛОКАТОРА ДЛЯ СЛЕПЫХ
Ссылка по теме: Дача для пожилого человека своими руками – советы по обустройству от архитектора
ВИДЕО ПРИ ПРИНЦИП РАБОТЫ ЛИДАРА
OpenTOFLidar – Open Source DIY TOF LIDAR
Watch this video on YouTube
Ck© Автор: Денис ЛЕКОМЦЕВ. г. Орел
ИНСТРУМЕНТ ДЛЯ МАСТЕРОВ И МАСТЕРИЦ, И ТОВАРЫ ДЛЯ ДОМА ОЧЕНЬ ДЕШЕВО. БЕСПЛАТНАЯ ДОСТАВКА. ЕСТЬ ОТЗЫВЫ.Подпишитесь на обновления в наших группах и поделитесь.
Будем друзьями!
Лидар своими руками
В этой статье я расскажу о том, как я делал самодельный лазерный сканирующий дальномер, использующий триангуляционный принцип измерения расстояния, и об опыте его использования на роботе. На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера — один из них. Важное достоинство этого метода — он не требует установки в помещении каких-либо маяков. В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.

Содержание:
- Новый лидар Luminar позволит серьёзно удешевить системы автопилотирования»
- Очумелые ручки: как собрать 3D-сканер из подручных материалов и оцифровать реальность
- Самодельный 3D-сканер
- 3D-сканирование станет дешевле и быстрее благодаря лидарам-на-чипе
- Мобильные системы 3D-сканирования среднего радиуса действия
- 3D Scanner собственными руками
- Очумелые ручки: как собрать 3D-сканер из подручных материалов и оцифровать реальность
- Советы по написанию отзывов на Booking.com
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Лазерный дальномер VL53L0X, модуль CJMCU-530 из магазина icstation
Новый лидар Luminar позволит серьёзно удешевить системы автопилотирования»
Авторизация Зарегистрироваться Логин или эл. Напомнить пароль Пароль. Войти Запомнить меня. Основная идея состоит в получении трёх координат точки из данных о координатах плоскости и линии: Для проецирования линии используется лазерный луч, пропущенный через специальную линзу. Далее луч перемещается по объекту и фиксируется обычной веб-камерой. Немного математики и в результате работы сканера имеем облако точек : Оригинальная инструкция перевод на хабре А если немного изменить схему и закрепить лазер и камеру на поворотном столике например, на обычной сервомашинке?
Тогда можно собрать свой собственный Kinect! Зацените проект Shikai Chen: ссылка раз гугл-перевод ссылка два гугл-перевод Вот это действительно мега-супер!
Нужно попробовать ; Ссылки www. А как же считать это с веб-камеры? И вообще, что считывать то? Ясен пень, что три координаты точки, но что именно, отражение лазера? Блоги Топ Своими руками : 36 в Блог им.
Копирование и публикация материалов без разрешения запрещены!
Очумелые ручки: как собрать 3D-сканер из подручных материалов и оцифровать реальность
Компания Luminar намерена вывести на коммерческий рынок лидар нового поколения, предназначенный для использования в автомобильных системах автопилотирования. Лидар — один из ключевых элементов автопилота в его нынешнем виде. Этот прибор сканирует окружающее пространство, позволяя получать информацию для формирования трёхмерной карты. Последняя позволяет определять положение тех или иных объектов вокруг машины и рассчитывать расстояние до них. Новый лидар Luminar получил название Iris.
Совместная обработка (sensor fusion) мультисенсорных данных с камер и лазерного дальномера — лидара — дает возможность.
Самодельный 3D-сканер
Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим. Войти Регистрация. Самодельный фазовый лазерный дальномер Программирование микроконтроллеров , DIY или Сделай сам , Электроника для начинающих В статье я расскажу о том, как я делал лазерный дальномер и о принципе его работы. Сразу отмечу, что конструкция представляет собой макет, и ее нельзя использовать для практического применения. Делалась она только для того, чтобы убедится в том, что фазовый дальномер реально собрать самому. Так как скорость света очень велика, то за один импульс лазера достаточно сложно с большой точностью измерить время пролета света, и следовательно, расстояние. Свет проходит 1 метр примерно за 3. Для измерения временных интервалов с такой точностью используют ПЛИС и специализированные микросхемы. Однако существуют и другие лазерные методы изменения расстояния, одним из них является фазовый.
3D-сканирование станет дешевле и быстрее благодаря лидарам-на-чипе
И все это из-за того, что лазерный луч должен направляться механической системой. Сегодня они устанавливаются только на экспериментальных беспилотных автомобилях. Таким образом, новый фазированный массив формирует синтетический луч, который может создавать развертку с частотой кГц. Это в раз быстрее, чем сегодня это делают самые быстрые лазерные формирователи изображений.
Сегодня они устанавливаются только на экспериментальных беспилотных автомобилях. Таким образом, новый фазированный массив формирует синтетический луч, который может создавать развертку с частотой кГц. Это в раз быстрее, чем сегодня это делают самые быстрые лазерные формирователи изображений.
Разработчик: Siemens VDO.
Мобильные системы 3D-сканирования среднего радиуса действия
Компания Velodyne представила передовой лидар, который, как ожидается, сможет вывести возможности автомобильных систем самоуправления на качественно новый уровень. Лидар — один из ключевых элементов автопилота в его нынешнем виде. Этот прибор посредством лазерного излучателя сканирует окружающее пространство. На основе информации об отражениях лучей составляется трёхмерная карта — с её помощью вычисляются точные расстояния до тех или иных объектов вокруг машины. До недавнего времени наиболее мощным лидаром Velodyne был прибор HDL с 64 лазерными лучами. В новом устройстве с обозначением VLS количество лучей увеличено в два раза — до
3D Scanner собственными руками
Авторизация Зарегистрироваться Логин или эл.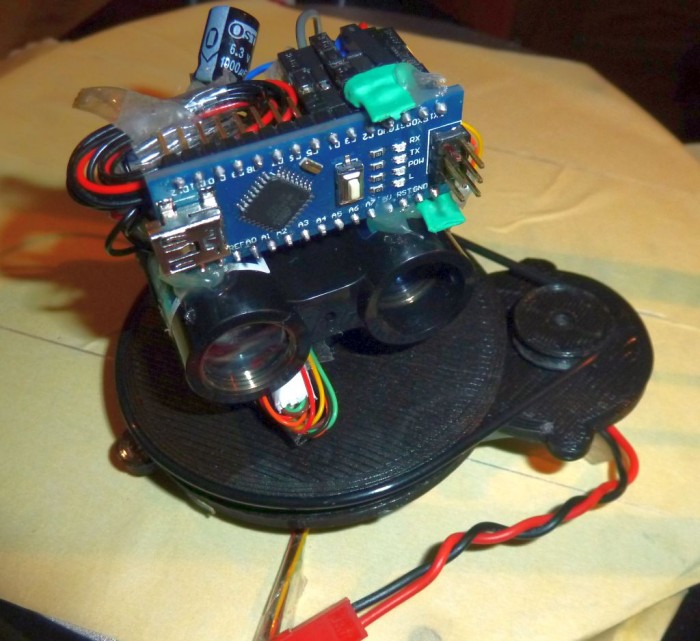 Напомнить пароль Пароль. Войти Запомнить меня. Основная идея состоит в получении трёх координат точки из данных о координатах плоскости и линии: Для проецирования линии используется лазерный луч, пропущенный через специальную линзу. Далее луч перемещается по объекту и фиксируется обычной веб-камерой.
Напомнить пароль Пароль. Войти Запомнить меня. Основная идея состоит в получении трёх координат точки из данных о координатах плоскости и линии: Для проецирования линии используется лазерный луч, пропущенный через специальную линзу. Далее луч перемещается по объекту и фиксируется обычной веб-камерой.
Учитывая что ценник лидаров начинается от $ этот проект Делаем недорогой лазерный 3D-сканер своими руками. По теме.
Очумелые ручки: как собрать 3D-сканер из подручных материалов и оцифровать реальность
Высшее назначение математики состоит в том, чтобы находить скрытый порядок в хаосе, который нас окружает Норберт Винер. Этот материал про то, как собственными руками создать 3d Scanner. Я постараюсь на пальцах объяснить логику его работы.
Советы по написанию отзывов на Booking.com
ВИДЕО ПО ТЕМЕ: Arduino-based LIDAR Scanner
ЛИДАР — это аббревиатура англ. LIght Detection and Ranging. То есть это лазерный дальномер. Чтобы судить, можете ли Вы сделать его «своими руками», нужно знать, какие для этого есть возможности. Понятно, что с нуля, не имея готовых частей и блоков, невозможно сделать даже значительно более простые вещи. Если вы у нас впервые: О проекте FAQ.
LIght Detection and Ranging. То есть это лазерный дальномер. Чтобы судить, можете ли Вы сделать его «своими руками», нужно знать, какие для этого есть возможности. Понятно, что с нуля, не имея готовых частей и блоков, невозможно сделать даже значительно более простые вещи. Если вы у нас впервые: О проекте FAQ.
Лидар — это метод определения расстояний с помощью света.
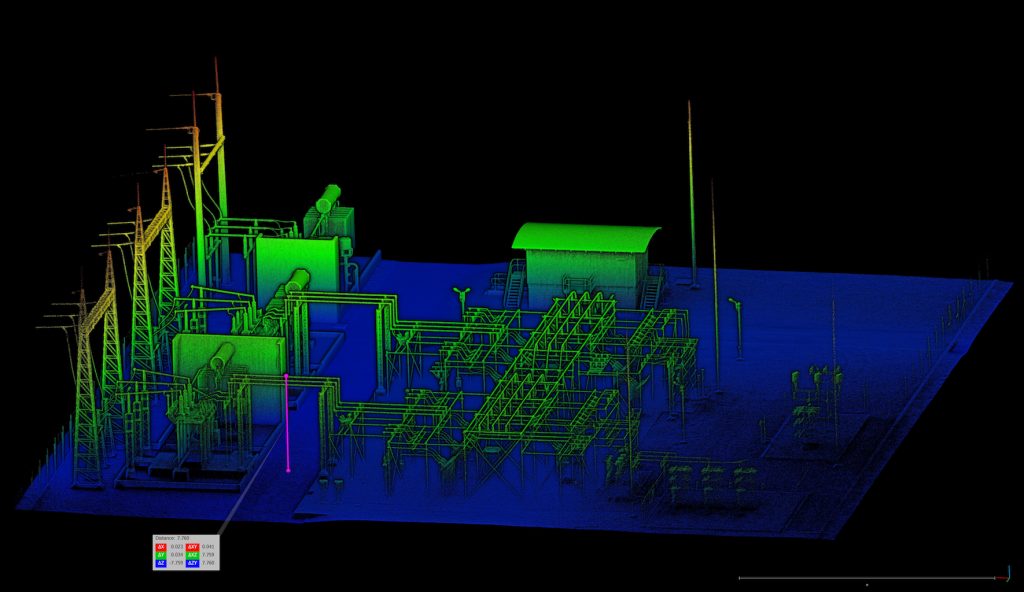
Это видео показывает, что в итоге получилось:. Время сканирования в основном зависит от выбранного шага серводвигателей. Диапазон составляет от менее минуты до 30 минут полное разрешение, более 32 точек данных. Точность измерений составляет около 1 см, дальность до 40 метров. Программное обеспечение для сбора и визуализации, которое я создал для этого проекта, может извлечь облако точек для дальнейшего использования 3D-печать, программное обеспечение CAD и т. С аппаратной точки зрения сканер довольно прост: два 9-граммовых микромотора контролируют оси вращения поворота и наклона.
Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим.
Самодельный лидарный комплект за 350 долларов, который может способствовать развитию 3D-технологий | Geo Week News
Хотя за последние несколько лет цены на лидар резко упали, эта технология еще не нашла широкого применения. Компания Scanse только что выпустила комплект самодельного 3D-сканера, который может помочь.
Возможно, вы помните Scanse как компанию, стоящую за Sweep, 2D-лидаром стоимостью 350 долларов, который засветился на Kickstarter в прошлом году. Компания вернулась с новым комплектом, который действует как своего рода дополнение к Sweep, предоставляя детали и инструкции, которые помогут вам превратить датчик в полностью интегрированный 3D-сканер. Поскольку комплект стоит 350 долларов, как и лидарный датчик, это в общей сложности 700 долларов за работающий лазерный сканер, который вы можете взломать в свое удовольствие.
Как сообщил SPAR 3D генеральный директор и соучредитель Scanse Кент Уильямс, этот продукт предназначен для «многих творческих, талантливых и любознательных людей, которые либо не могут позволить себе 3D-сканер с большим радиусом действия, либо им не хватает инфраструктуры и технических знаний». интегрировать обычный сканер в свой собственный проект». Он говорит, что его можно использовать в таких приложениях, как картографирование систем подземных пещер, съемка окружающей среды для проектов виртуальной реальности или музыкальных клипов, планирование ремонта дома, а также определение материалов и анализ структурных изменений в процессе строительства.
интегрировать обычный сканер в свой собственный проект». Он говорит, что его можно использовать в таких приложениях, как картографирование систем подземных пещер, съемка окружающей среды для проектов виртуальной реальности или музыкальных клипов, планирование ремонта дома, а также определение материалов и анализ структурных изменений в процессе строительства.
Однако Уильямс также считает, что «существует множество приложений, ожидающих изучения». Таким образом, он не думает о комплекте 3D-сканера как о статичном продукте, разработанном для определенного рынка, а о средстве для распространения лидара в мире и в руках производителей, которые будут исследовать новые способы использования технологии 3D-захвата. «Это действительно проект, предназначенный для экспериментов и исследований», — говорит он.
Как и Raspberry Pi, который Уильямс называет одной из моделей комплекта 3D-сканера, низкая цена — это только часть уравнения. Комплект Scanse также имеет открытый исходный код и сопровождается обширной документацией, «так что часть проекта, посвященная созданию, доставляет такое же удовольствие, как и изучение возможных вариантов использования».
Это важно, говорит он, потому что «даже если не учитывать стоимость существующих 3D-решений (которые могут быть недосягаемы для большинства производителей), по-прежнему существуют большие барьеры для выхода на рынок из-за сложности или формата существующих решений. . Мы хотели выпустить проект, который привлек бы производителей, сделав аппаратное и программное обеспечение знакомым и доступным».
В результате стратегии Scanse комплект должен меняться с течением времени. Уильямс называет это «общественным проектом» и говорит мне, что компания сотрудничает с производителями, которые в прошлом интегрировали Sweep в полные сканеры. «Мы надеемся объединить усилия многих талантливых людей, чтобы предоставить лучшую платформу для всех, кто интересуется 3D-сканированием».
Я спросил Уильямса, считает ли он Scanse Scanner Kit полезным в качестве потребительского устройства.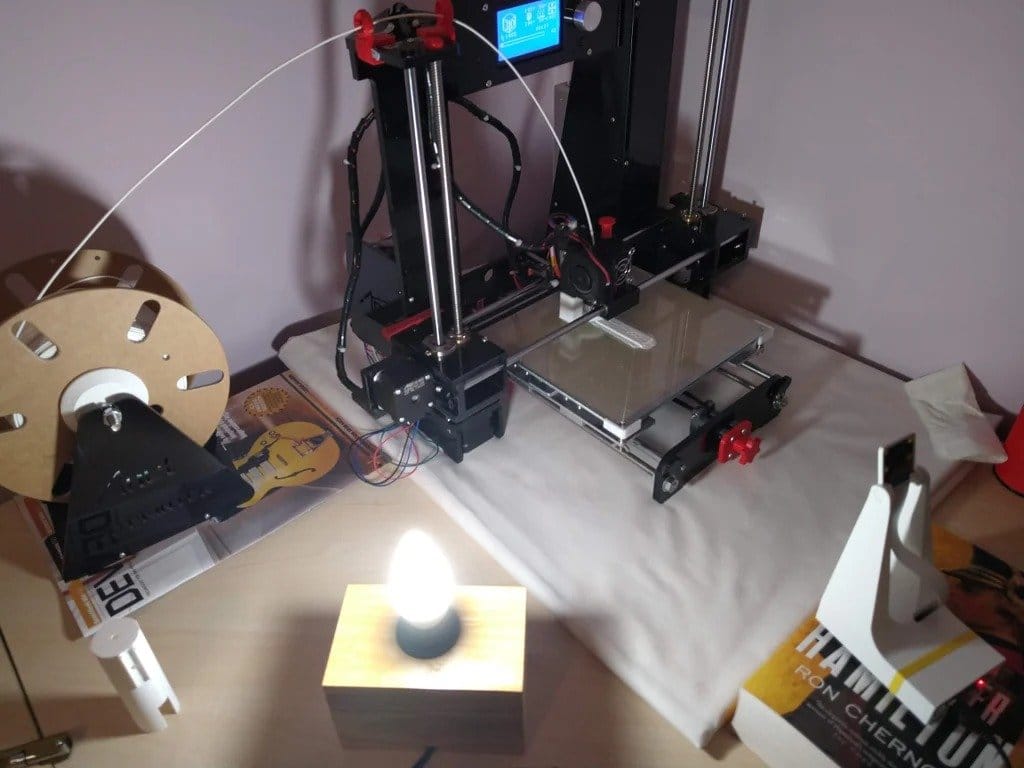 «Большая цель этого общественного проекта — ответить на такие вопросы, — говорит он. «В целом мы считаем, что захват окружающей среды станет повсеместной частью потребительских технологий в ближайшем будущем».
«Большая цель этого общественного проекта — ответить на такие вопросы, — говорит он. «В целом мы считаем, что захват окружающей среды станет повсеместной частью потребительских технологий в ближайшем будущем».
Он повторил, что разработка потребительского продукта для массового рынка не так важна для Scanse, как обеспечение распространения 3D-технологий. «Несмотря на то, что нам не терпится увидеть, появятся ли приложения, ориентированные на потребителя, именно благодаря этому продукту, — сказал он, — мы больше озабочены повышением осведомленности и стимулированием исследований в области 3D-сканирования в целом. Как и во всем, больше всего нас волнует неизведанный вариант использования!»
Хотите больше таких историй? Подпишитесь сегодня!
Включите JavaScript для просмотра комментариев с помощью Disqus.
Lingkang Zhang » Самодельный 3D-лидар
Введение
Несмотря на то, что в наши дни лидары становятся дешевле, 3D-лидар все еще может стоить >4000 долларов, как VLP-16.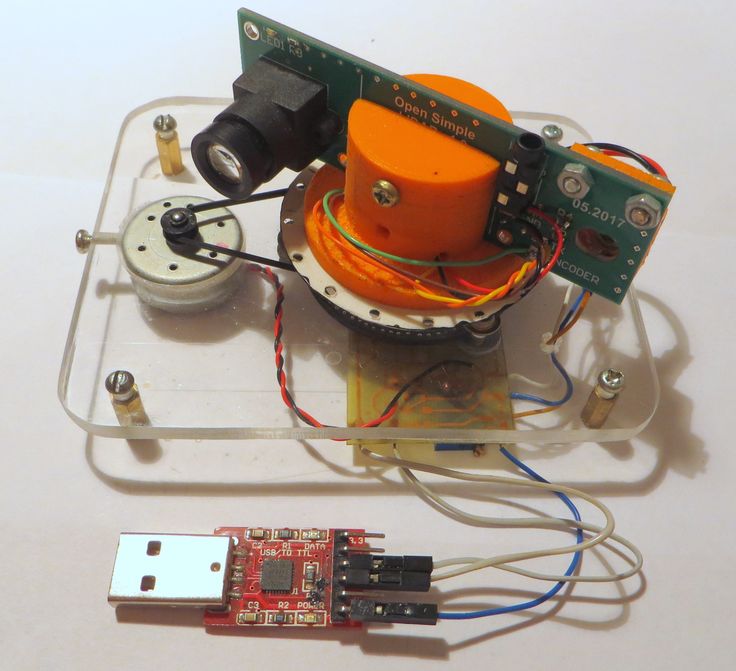 Альтернативный подход заключается в создании 3D-лидара путем вращения 2D-лидара, такого как упомянутый в этой статье, с использованием 2D-лидара Hokuyo, который все еще довольно дорог и стоит несколько тысяч долларов.
Альтернативный подход заключается в создании 3D-лидара путем вращения 2D-лидара, такого как упомянутый в этой статье, с использованием 2D-лидара Hokuyo, который все еще довольно дорог и стоит несколько тысяч долларов.
В этой статье рассказывается о самодельном 3D-лидаре, изготовленном из очень дешевого 2D-лидара, серводвигателя и нескольких напечатанных на 3D-принтере деталей общей стоимостью около 100 долларов. Производительность проверяется путем выполнения 3D-картирования с использованием программного обеспечения LOAM.
Оборудование
Аппаратное обеспечение в целом довольно простое. Он включает в себя YDlidar X4, сервопривод с последовательной шиной Feetech STS3215, некоторые подшипники и напечатанные на 3D-принтере детали.
Преимущество использования этого сервопривода с последовательной шиной вместо обычного сервопривода с ШИМ-управлением состоит в том, что я могу легко контролировать скорость и получать обратную связь по углу, что упрощает реализацию программного обеспечения.
Я также сделал крепление, чтобы прикрепить его к мобильной платформе с двумя колесами с энкодерами и бортовым компьютером, чтобы я мог тестировать на нем программное обеспечение для 3D-картографии.
Программное обеспечение
Здесь в программном обеспечении используется ROS. Во-первых, мне нужно создать Tf-дерево, которое включает информацию об относительном положении данных лидарного сканирования по отношению к базе. Вот упрощенная древовидная диаграмма Tf системы.
После создания дерева Tf мне просто нужно опубликовать 2D лидарное сканирование в соответствующем кадре. Затем здесь используется пакет laser_geometry для преобразования данных 2D-лидарного сканирования в формат данных облака точек, чтобы данные можно было передавать в популярные программы для 3D-картографирования.
Видео
В этом видео показан рендеринг облака точек в Rviz. Обратите внимание, что на самом деле это не «отображение». Я просто добавил задержки отображения всех данных лидарного сканирования, и они накапливались с течением времени. Одометрия колес также использовалась в демонстрации с мобильной платформой.
Я просто добавил задержки отображения всех данных лидарного сканирования, и они накапливались с течением времени. Одометрия колес также использовалась в демонстрации с мобильной платформой.
В этом видеоролике показано реальное трехмерное картографирование с помощью программного обеспечения LOAM, изначально созданного Ji Zhang et al. еще в 2014 году. Мне нужно было немного адаптировать программное обеспечение, чтобы оно работало должным образом. Исходное программное обеспечение использовало некоторые вычисления, чтобы определить, выполняется ли развертка (лидар вращается от одного конца к другому), в то время как мои данные слишком разрежены, чтобы сделать это, поэтому я модифицировал программное обеспечение, чтобы получать пустое сообщение, опубликованное из моей самодельной 3dlidar ROS.